Изобретение относится к области измерительной техники и микросистемной техники, а более конкретно к интегральным измерительным элементам величины угловой скорости.
Известен микромеханический гироскоп-акселерометр [Патент РФ № 81799 от 22.12.2008 г. на полезную модель «Микромеханический гироскоп-акселерометр». Заявка № 2008150887/22 от 22.12.2008 г.], содержащий плату из полупроводникового материала, инерционную массу, выполненную в виде прямоугольной пластины из кремния со сквозными отверстиями и расположенную с зазором относительно подложки и связанную с ней через упругие балки, которые одними концами прикреплены к инерционной массе, а другими концами через промежуточные элементы к подложке, электровибропривод, датчик силы, содержащий подвижные и неподвижные электроды емкостные датчики перемещений гироскопического канала, емкостные датчики перемещений акселерометрического канала, содержащие подвижные и неподвижные электроды, блок электроники, отличающийся тем, что в инерционной массе по осям ее симметрии выполнены четыре сквозные прорези от периферии пластины к ее центру, внутри которых размещены упругие балки, образующие подвес, позволяющий инерционной массе совершать колебания как в плоскости пластины из кремния, так и ортогонально к ней.
Данный прибор имеет недостаток подвеса инерциальной массы, заключающийся в том, что инерционная масса закреплена упругими подвесами близко к центру, а также достаточно длинными подвесами из-за чего первой формой колебаний при модальном анализе является кручение массы вокруг центральной оси, чем обуславливает высокие помехи выходного сигнала при работе в условиях высоких вибраций.
Признаками аналога, совпадающими с существенными признаками, являются инерционная масса и упругие балки, выполненные из полупроводникового материала и расположенные с зазором относительно подложки.
Функциональным аналогом заявляемого объекта является интегральный микромеханический гироскоп [В.Я. Распопов, Микромеханические приборы, Учебное пособие, Тул. гос. университет, Тула, 2002, стр.32, рис.1.26], содержащий диэлектрическую подложку с расположенными на ней металлическими электродами емкостных преобразователей перемещений, две инерционные массы, расположенные с зазором относительно диэлектрической подложки и выполненные в виде пластин из полупроводникового материала, образующие с расположенными на диэлектрической подложке электродами емкостных преобразователей перемещений плоские конденсаторы, и связанные с диэлектрической подложкой через систему упругих балок, которые одними концами соединены с инерционными массами, а другими – с опорами, выполненными из полупроводникового материала и расположенными на диэлектрической подложке, один неподвижный электрод электростатического привода с гребенчатыми структурами по обеим его сторонам, выполненный из полупроводникового материала и расположенный на диэлектрической подложке между инерционными массами, с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов, два неподвижных электрода электростатических приводов с гребенчатыми структурами с одной стороны, выполненные из полупроводникового материала и расположенные на диэлектрической подложке по внешним сторонам инерционных масс, с возможностью электростатического взаимодействия с инерционными массами в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Х, расположенной в плоскости подложки.
Признаками аналога, совпадающими с существенными признаками, являются инерционная масса и упругие балки, выполненные из полупроводникового материала и расположенные с зазором относительно подложки, опоры и неподвижные электроды электростатических приводов с гребенчатой структурой с одной стороны, выполненные из полупроводникового материала и расположенные непосредственно на подложке.
Недостатком аналога является увеличенная площадь, занимаемая на кристалле, так как у данного гироскопа две инерционные массы, что увеличивает площадь устройства на подложке. В предлагаемой модели инерционная масса только одна, что уменьшает площадь, занимаемую на кристалле, при этом заявленные функции сохраняются.
Из известных наиболее близким по технической сущности к заявляемому изобретению является «Structurally decoupled micromachined gyroscopes with post-release capacitance enhancement», Cenk Acar and Andrei M Shkel, 2005 J. Micromech. Microeng. 15 1092 (Фиг.1).
В данном устройстве движущийся электрод (ротор) привода в режиме привода непосредственно соединен с точкой крепления через сложенную подвесную балку. Сложенная подвеска полностью ограничивает движение в направлении движения и заставляет ротор электрода в режиме привода колебаться исключительно в направлении движения. Сила возбуждения в режиме привода прикладывается к инерционной массе гироскопа через сложенную подвеску, которая непосредственно передает колебания в режиме привода ротора приводного электрода. Колебания инерциальной массы в чувствительном режиме, вызванные силой Кориолиса, вызванной вращением, непосредственно передаются на ротор чувствительного электрода через другую сложенную балку, которая также допускает относительные колебания в режиме привода.
Признаками прототипа, совпадающими с существенными признаками, являются:
- корпус в виде платы из полупроводникового материала;
- первый и второй преобразователи перемещений, содержащие подвижные и неподвижные электроды;
- первый и второй электростатические приводы, содержащие подвижные и неподвижные элементы;
- торсионный элемент, выполненный в виде внутренних П-образных балок.
- электростатический привод и емкостной преобразователь перемещения выполнены на промежуточном элементе.
Главной особенностью прототипа является сборка электростатического привода после изготовления путем перемещения неподвижных электродов при помощи тепловых актюаторных элементов и фиксация упругими защелками в крайнем положении для изготовления мощного электростатического привода с предельно малым зазором между электродами. Это значительно увеличивает площадь кристалла. Прототип выполнен по технологии КНИ из готовой пластины с толщиной приборного слоя 25 мкм, перфорированые элементы подвесов обусловлены необходимостью вытравливания слоя оксида кремния между подложкой и приборным слоем. Это уменьшает чувствительность прибора и поперечную жесткость.
Технический результат предполагаемого изобретения, заключается в возможности измерения величин угловых скоростей вдоль оси Х, расположенной в плоскости подложки.
Технический результат достигается тем, что интегральный микромеханический гироскоп, содержащий полупроводниковую подложку с расположенными на ней двумя неподвижными электродами емкостных преобразователей перемещений, выполненными из полупроводникового материала, двумя подвижными электродами емкостных преобразователей перемещений, выполненными из полупроводникового материала, два неподвижных электрода электростатических приводов с гребенчатыми структурами с одной стороны, выполненных из полупроводникового материала и расположенных непосредственно на полупроводниковой подложке, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, два подвижных электрода электростатического привода, выполненные в виде гребенчатых структур с двух противоположных сторон из полупроводникового материала и расположенного с зазором относительно подложки с возможностью электростатического взаимодействия с двумя неподвижными электродами электростатических приводов в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов, соединенного с опорами с помощью восьми торсионных элементов, выполненных из полупроводникового материала и расположенных с зазором относительно подложки, инерционную массу, выполненную из полупроводникового материала и расположенную с зазором относительно подложки, торсионные элементы, выполненные из полупроводникового материала и расположенных с зазором относительно подложки отличающийся тем, что изменено положение и соединение восьми дополнительных торсионных элементов, выполненные из полупроводникового материала и расположенных с зазором относительно подложки по краям инерционной массы, четыре дополнительных неподвижных электрода электростатического привода, выполненные из полупроводникового материала, расположенные непосредственно на подложке и изолированные друг от друга вытравленным каналом, дополнительные металлические контактные площадки, расположенные на опорах и неподвижных электродах, четыре дополнительных гребенчатых элемента на подвижных электродах электростатического привода, выполненные из полупроводникового материала и расположенные с зазором относительно подложки, и образующие с четырьмя дополнительными неподвижными электродами емкостных приводов, дополнительный слой полупроводникового материала, выполненный из оксида кремния.
Предлагаемое изобретение изготовлено по технологии с заранее вытравленными канавками (фиг. 1) на подложке и увеличенной толщиной приборного слоя в 50 мкм, что увеличивает чувствительность прибора при измерении кориолисовой силы и увеличивает поперечную жесткость. В предлагаемом изобретении отсутствует сборка электростатического привода после изготовления, и сила привода увеличена за счет увеличения числа гребенок и оптимальной конфигурации электростатического привода. Упругие подвесы расположены по краям инерционной массы, уменьшают кручения вокруг своей оси. Электростатический привод разделен на три отдельных электрода, что позволяет использовать электростатический привод в качестве фазового детектора, для настройки частоты колебаний и появляется возможность подавать различные управляющие сигналы на отдельные электроды. Указанная модель имеет резонансную частоту 5000 Гц, что делает конструкцию устойчивой к вибрациям до 2000 Гц, что является важным требованием при использовании устройства да подвижной технике в условиях высоких вибраций.
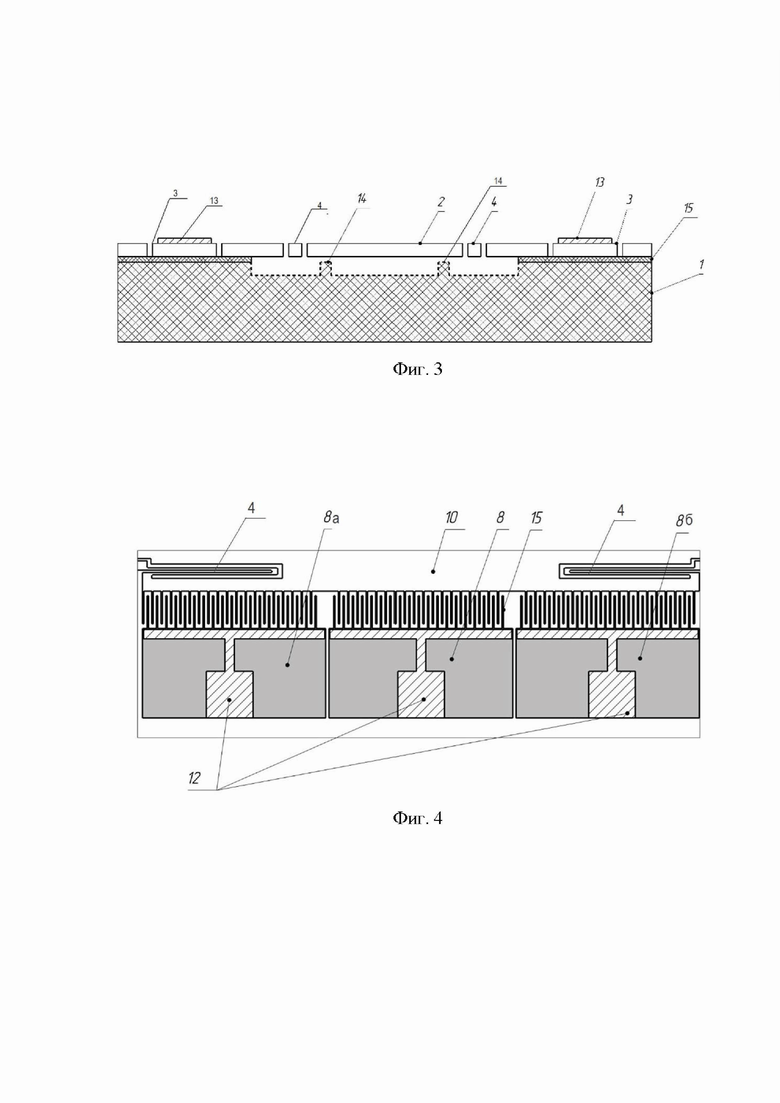
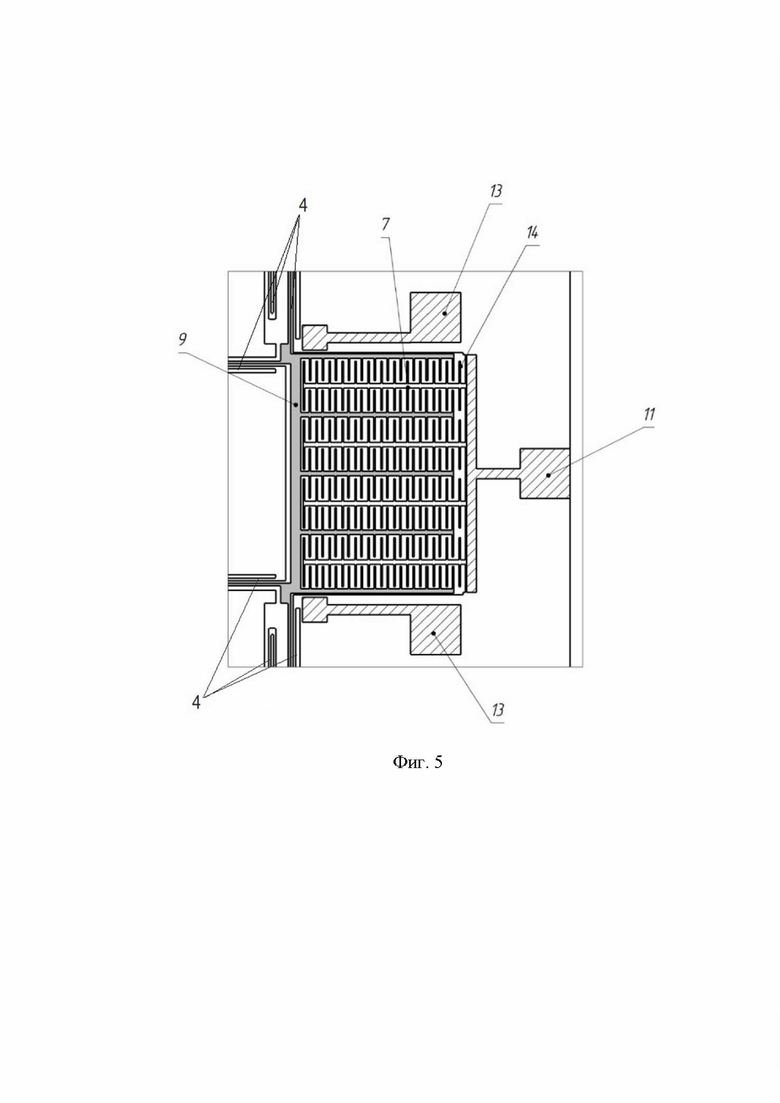
Заявляемое изобретение поясняется следующими чертежами: на фиг.2 представлена топология конструкции микромеханического гироскопа, вид сверху, на фиг.3 представлена конструкция микромеханического гироскопа в сечении, вид сбоку, на фиг.4 представлены части конструкции микромеханического гироскопа, вид сверху.
На фигурах 2 - 5 представлена конструктивная схема предлагаемого интегрального микромеханического гироскопа, где
1. Полупроводниковая подложка,
2 . Инерционная масса,
3. Опора,
4. Торсионный элемент,
5. Электростатический привод,
6. Емкостной преобразователь перемещения,
7. Неподвижный электрод емкостного преобразователя перемещений,
8. Неподвижный электрод электростатического привода,
8а. Дополнительный неподвижный электрод электростатического привода,
8б. Дополнительный неподвижный электрод электростатического привода,
9. Подвижный электрод емкостного преобразователя перемещений,
10. Подвижный электрод электростатического привода,
11. Контактная площадка емкостного преобразователя перемещений,
12. Контактная площадка электростатического вибропривода,
13. Контактная площадка инерционной массы,
14. Зазор,
15. Дополнительный слой оксида кремния.
Микромеханический гироскоп состоит из полупроводниковой подложки (1) и дополнительного слоя оксида кремния (15), на котором изготовлена структура, состоящая из подвижной инерционной массы (2), торсионных элементов (4), электростатического привода (5), емкостного преобразователя перемещений (6), подвижных (9) и неподвижных (7) электродов емкостного преобразователя перемещений, подвижных (10) и неподвижных (8) электроды электростатического привода. Подвижность массы обеспечена зазором в основании (14) и торсионными элементами (4) присоединенных одним концом к инерционной массе, а другим концом через торсионные элементы к опорам (3). К инерционной массе подведены контактные металлические площадки (13). Торсионные элементы позволяют инерционной массе совершать колебательные движения в двух плоскостях. Движение по оси Х обеспечено гребенчатым электростатическим приводом (5), подвижным электродом электростатического привода (10) которого представлен в виде подвижного электрода, статор выполнен на приборном слое и состоит из трех неподвижных электродов (8а, 8, 8б), один из которых используется для фазового детектирования движения. Каждый элемент статора изолирован друг от друга вытравленным каналом и имеет металлические контактные площадки (12). При движении вдоль оси У изменяется емкость дифференциального датчика перемещения (6), подвижный электрод (9) изготовлен на промежуточном элементе упругого элемента, неподвижный электрод (7) выполнен в объеме приборного слоя и имеет металлическую контактную площадку (11).
Предложенное устройство работает следующим образом.
При подаче на неподвижные электроды электростатических приводов с гребенчатыми структурами с одной стороны переменных напряжений, сдвинутых относительно друг друга по фазе на 1800, относительно подвижных электродов между ними возникает электростатическое взаимодействие, что приводит к возникновению колебаний инерционной массы в плоскости полупроводниковой подложки вдоль оси Х, за счет изгиба торсионных элементов.
При возникновении угловой скорости вдоль оси Z, расположенной перпендикулярно плоскости полупроводниковой подложки, инерционная масса и подвижные электроды емкостных преобразователей перемещений под действием сил инерции Кориолиса начинает совершать колебания в плоскости полупроводниковой подложки вдоль оси Y, за счет изгиба торсионных элементов 17. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных неподвижными электродами емкостных преобразователей перемещений и подвижными электродами емкостных преобразователей перемещений за счет изменения величины зазора между ними, характеризует величину угловой скорости.
Таким образом, по сравнению с аналогичными устройствами, предлагаемый интегральный микромеханический гироскоп позволяет увеличить чувствительность и поперечную жесткость устройства за счет увеличения толщины приборного слоя в два раза (50 против 25 мкм), уменьшить кручение инерционной массы вокруг своей оси с помощью упругих подвесов, расположенных по краям, использовать электростатический привод в качестве фазового детектора. Указанная модель имеет резонансную частоту 5000 Гц, когда аналог имеет от 1065 до 1070 Гц, что делает конструкцию устойчивой к вибрациям до 2000 Гц, что является важным требованием при использовании устройства да подвижной технике в условиях высоких вибраций.
Указанная совокупность существенных признаков является достаточной для достижения обеспечиваемого полезной моделью технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2011 |
|
RU2477863C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2006 |
|
RU2304273C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2005 |
|
RU2293337C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2016 |
|
RU2649249C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2015 |
|
RU2597953C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| Интегральный микромеханический гироскоп-акселерометр | 2019 |
|
RU2716869C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |

Изобретение относится к области измерительной техники и микросистемной техники. Интегральный микромеханический гироскоп дополнительно содержит восемь дополнительных торсионных элементов, выполненных из полупроводникового материала и расположенных с зазором относительно подложки по краям инерционной массы, четыре дополнительных неподвижных электрода электростатического привода, выполненные из полупроводникового материала, расположенные непосредственно на подложке и изолированные друг от друга вытравленным каналом, дополнительные металлические контактные площадки, расположенные на опорах и неподвижных электродах, четыре дополнительных подвижных электрода электростатического привода, выполненные из полупроводникового материала, и расположенные с зазором относительно подложки, и образующие с четырьмя дополнительными неподвижными электродами емкостных преобразователей перемещений плоские конденсаторы, а также дополнительный слой полупроводникового материала, выполненный из оксида кремния. Технический результат – возможность измерения величин угловых скоростей вдоль оси Х, расположенной в плоскости подложки. 5 ил.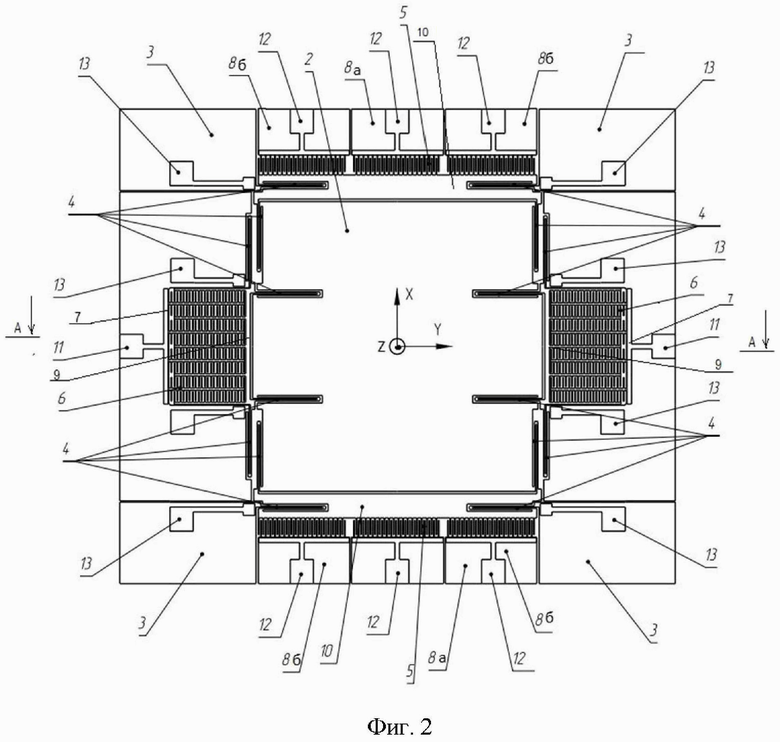
Интегральный микромеханический гироскоп, содержащий полупроводниковую подложку с расположенными на ней двумя неподвижными электродами емкостных преобразователей перемещений, выполненными из полупроводникового материала, двумя подвижными электродами емкостных преобразователей перемещений, выполненными из полупроводникового материала, два неподвижных электрода электростатических приводов с гребенчатыми структурами с одной стороны, выполненных из полупроводникового материала и расположенных непосредственно на полупроводниковой подложке, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, два подвижных электрода электростатического привода, выполненные в виде гребенчатых структур с двух противоположных сторон из полупроводникового материала и расположенные с зазором относительно подложки с возможностью электростатического взаимодействия с двумя неподвижными электродами электростатических приводов в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов, соединенных с опорами с помощью восьми торсионных элементов, выполненных из полупроводникового материала и расположенных с зазором относительно подложки, инерционную массу, выполненную из полупроводникового материала и расположенную с зазором относительно подложки, торсионные элементы, выполненные из полупроводникового материала и расположенные с зазором относительно подложки, отличающийся тем, что в него введены восемь дополнительных торсионных элементов, выполненных из полупроводникового материала и расположенных с зазором относительно подложки по краям инерционной массы, четыре дополнительных неподвижных электрода электростатического привода, выполненные из полупроводникового материала, расположенные непосредственно на подложке и изолированные друг от друга вытравленным каналом, дополнительные металлические контактные площадки, расположенные на опорах и неподвижных электродах, четыре дополнительных подвижных электрода электростатического привода, выполненные из полупроводникового материала, и расположенные с зазором относительно подложки, и образующие с четырьмя дополнительными неподвижными электродами емкостных преобразователей перемещений плоские конденсаторы, а также дополнительный слой полупроводникового материала, выполненный из оксида кремния.
| Cenk Acar, Andrei M | |||
| Shkel | |||
| "Structurally decoupled micromachined gyroscopes with post-release capacitance enhancement" J | |||
| Micromech | |||
| Microeng | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2011 |
|
RU2477863C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2503924C1 |
| US 2003110858 A1, 19.06.2003. | |||

