Изобретение относится к системам управления дорожным транспортом, а именно, к системам предотвращения столкновений.
Предшествующий уровень техники
Известна специальная система для предотвращения столкновений и управления действиями оператора компании SICK (http://inrestech.ru/equipment/sick-parktronic/). Благодаря применению ноу-хау в сфере помощи водителю в устройствах для предупреждения о столкновениях компании SICK, горное предприятие получает современную систему, которая обеспечивает увеличение производительности оборудования, предотвращение повреждений оборудования и сокращение сроков его простоев.
Система включает в себя независимые комплекты для четырех видов транспортных средств: Самосвал, Экскаватор, Погрузчик и Бульдозер. В системе SICK используются датчики на основе технологии LIDAR или радарные датчики на основе технологии «мульти-эхо».
Недостатком данной системы является то, что используемые датчики работают на небольших расстояниях, вследствие чего снижается вероятность своевременного обнаружения движущегося встречного транспорта, что в итоге может привести к столкновению.
Известна система RealTrac - предотвращение столкновений транспорта и наезда техники на персонал (https://real-trac.com/ru/system/realtrac-cas/). После установки на транспортное средство или другую технику (ВШТ, ПДМ, шахтный самосвал, погрузчик, буровая установка) оборудования продукта "RealTrac Предотвращение столкновений" вокруг него формируется 3 зоны контроля. Трехзональный дисплей водителя для постоянного визуального контроля обстановки вокруг транспортного средства позволяет зафиксировать опасное сближение с другим объектом и предпринять меры по предотвращению столкновения транспорта или наезда на персонал.
Дисплей показывает работоспособность системы, а наличие кнопок позволяет отправить сообщение об аварии или подтвердить какое-либо действие.
Недостатком данной системы является то, что в предлагаемой системе используется небольшая ширина радиоканала, поэтому в нём создаются помехи. Кроме того, чем меньше ширина канала, тем меньшее количество устройств может работать на этом канале. Также недостатком является то, что система не позволяет настроить количество зон и секторов, так как построена на светодиодной схеме.
Наиболее близким к заявляемому изобретению является патент РФ на изобретение №2715599 «СИСТЕМА ПРОТИВОАВАРИЙНОЙ БЕЗОПАСНОСТИ». Система противоаварийной безопасности содержит блок обнаружения препятствий, включающий ультразвуковой датчик, выполненный с возможностью световой и звуковой сигнализации и связанный с блоком согласования и уведомления. Ультразвуковой датчик расположен в корпусе, в задней части которого размещена крышка со сквозным отверстием для вывода кабеля ультразвукового датчика к блоку согласования и уведомлений. Блок согласования и уведомления соединен электрическим экранированным кабелем с исполнительным механизмом тормозной системы карьерного самосвала, при этом блок согласования и уведомления содержит корпус и размещенную внутри него плату с электронной схемой управления. На корпусе расположены индикатор сигнализации торможения самосвала, разъем для подключения питания блока через предохранитель от бортового питания и разъем для подключения кабеля ультразвукового датчика.
Недостатком предложенной системы является использование ультразвукового датчика, излучающего звуковые колебания, частота которых превышает 20 кГц. Они в виде волн «прошивают» пространство, и, встречаясь с твердыми предметами и отражаясь от них, попадают в приемник датчика. При этом датчик фиксирует все препятствия, попадающие в его поле, не идентифицируя их. Кроме того, используемые датчики работают на небольших расстояниях, вследствие чего снижается вероятность своевременного обнаружения движущегося встречного транспорта, что в итоге может привести к столкновению. Недостатком также является и включение в систему блока торможения транспортного средства, что может привести к аварийной ситуации при бесконтрольном резком торможении.
Раскрытие изобретения
Технической задачей данного изобретения является создание системы предотвращения столкновений с использованием сверхширокополосной связи с высокочастотным импульсом с малой энергией, которое рассчитывает расстояние до объекта, определяет его расположение относительно мобильного объекта, осуществляет звуковое и визуальное оповещение водителя о присутствии в опасной зоне транспортных средств или персонала, оповещая об опасности столкновения с объектами. Кроме того, за счёт применения предлагаемой системы происходит сокращение неэффективных производственных затрат и повышается производительности работы персонала.
Поставленная техническая задача решается за счет того, что в блок устройства предотвращения столкновений и блок персонального устройства системы предотвращения столкновений включены блоки UWB датчиков, которые производят непрерывный обмен данными с аналогичными блоками UWB датчиков, установленными на других мобильных объектах или находящихся у персонала, рассчитывает расстояние до объектов, находящихся в их зоне радиовидимости, рассчитывает скорость сближения/отдаления с ними. Система хранит список обнаруженных соседей и периодически обновляет расстояние до них. Система оповещает о присутствии в опасной зоне транспортных средств или персонала, предупреждая об опасности столкновения с объектами.
Предпосылки
Статистика несчастных случаев на открытых и подземных горных работах показывает, что инциденты, связанные со столкновениями крупногабаритной техники, наездами на легкий автотранспорт и персонал являются наиболее распространенным видом аварий, представляющих серьезную опасность для жизни и здоровья людей. Подобные аварии вызваны плохим обзором оператора, усталостью, невнимательностью, превышением скоростного режима, большим количеством техники, условиями плохой видимости. Аварии могут приостановить работу предприятия на несколько дней. Затраты на ремонт, простои техники, административные взыскания и потеря производительности - все это оказывает значительное негативное влияние на эффективность горного производства. Статистика ОГР по крупнейшим отечественным предприятиям показывает, что 24% несчастных случаев с участием карьерной техники связаны с движением/работой техники при нахождении людей в непосредственной близости. В том числе 14% характеризуются пребыванием людей в «слепой зоне» обзора машиниста (водителя), 12% - относятся к движению задним ходом или рабочим движениям кормовой части машин. 20% всех указанных несчастных случаев, по результатам расследования, могли быть предотвращены с помощью применения системы предотвращения столкновений.
Изобретение поясняется чертежами, где:
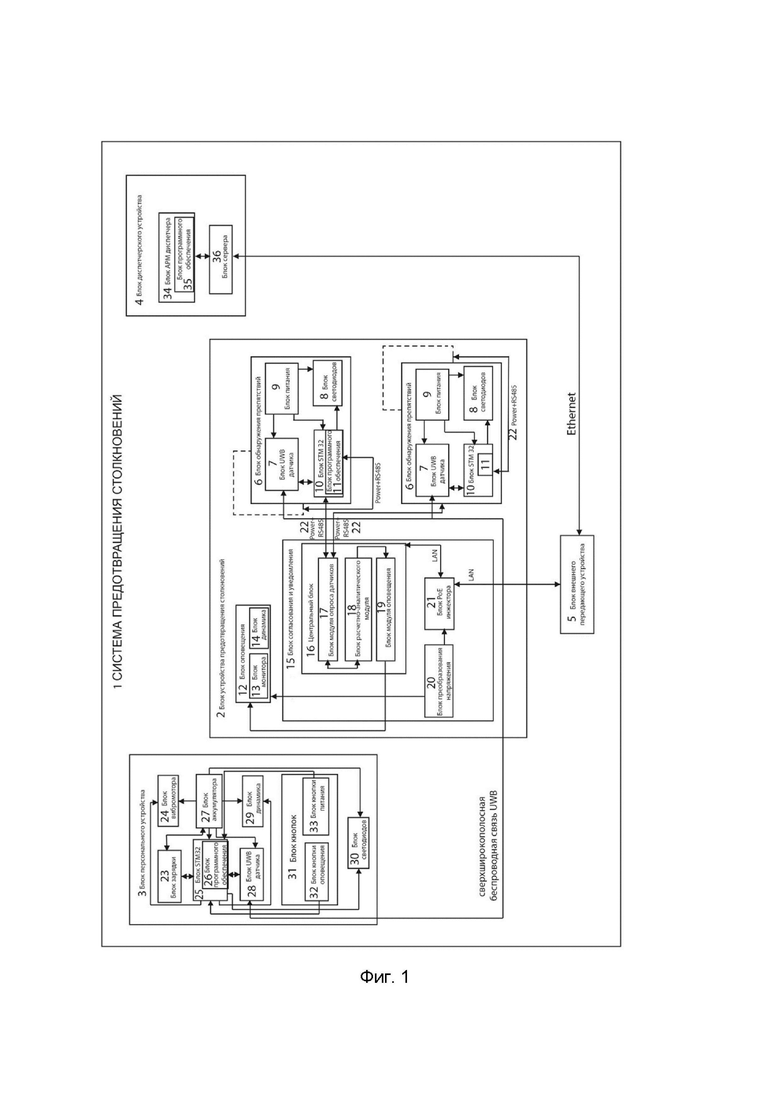
На фиг. 1 представлена схема системы предотвращения столкновений.
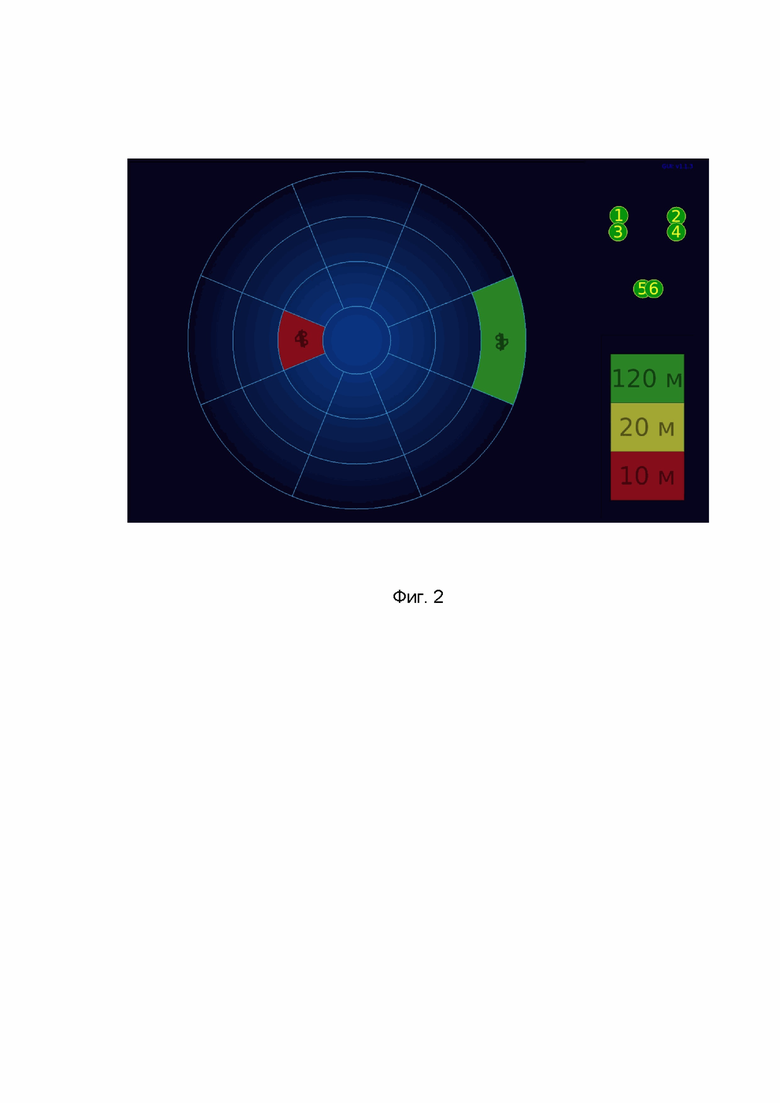
На фиг. 2 представлена визуализация на блоке монитора схематичного отображения расположения блоков UWB датчиков пропорционально их установке на транспортном средстве. Диагностика блоков UWB датчиков: исправные блоки UWB датчиков отображаются зеленым цветом, неисправные - красным. Визуальное отображение на блоке монитора.
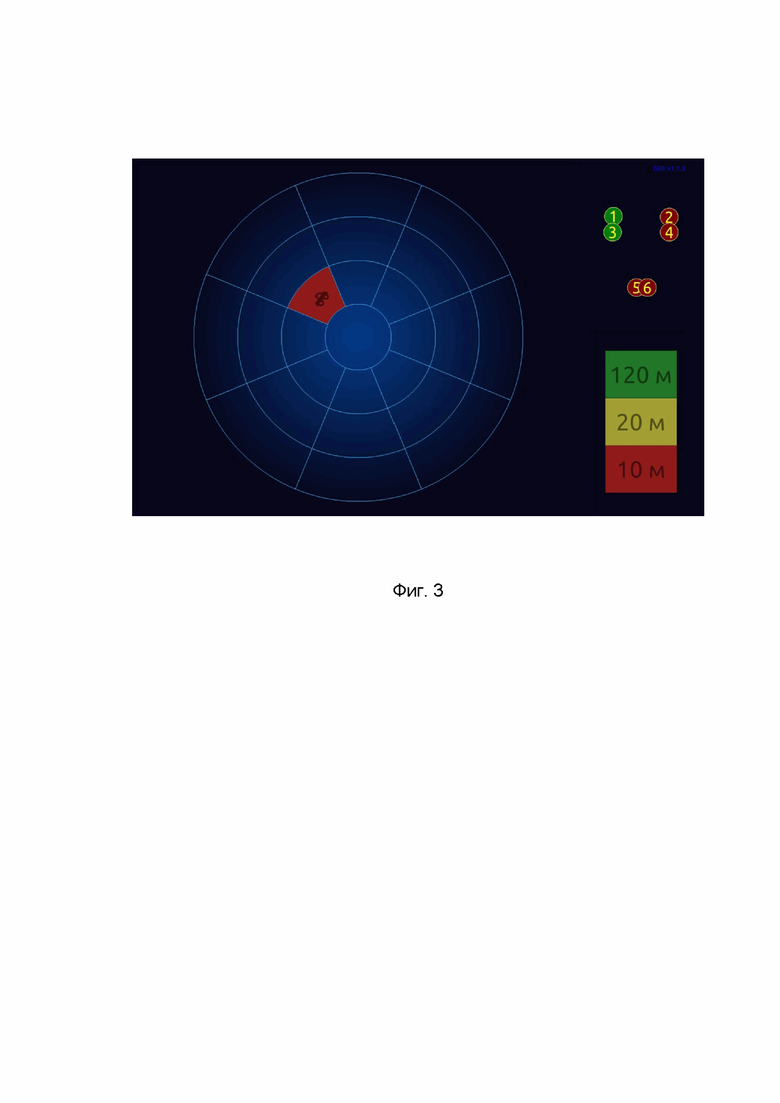
На фиг. 3 представлена визуализация на блоке монитора схематичного отображения расположения блоков UWB датчиков пропорционально их установке на транспортном средстве. Диагностика блоков UWB датчиков: исправные блоки UWB датчиков отображаются зеленым цветом, неисправные - красным. Визуальное отображение на блоке монитора.
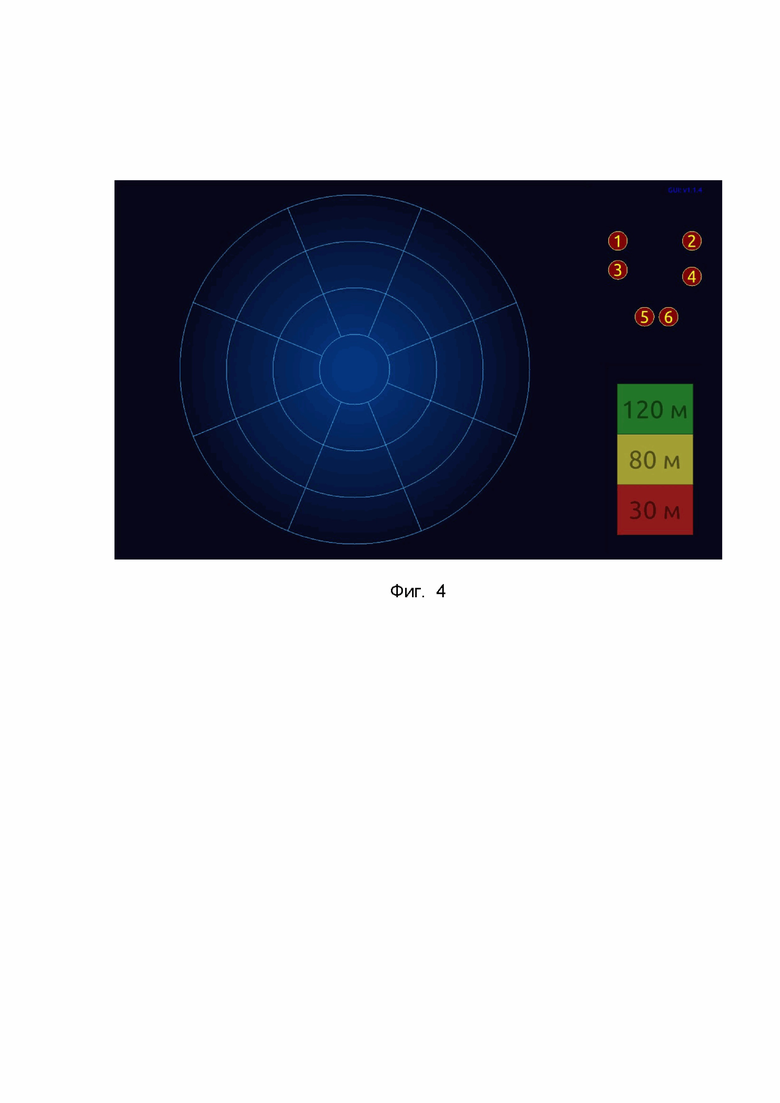
На фиг. 4 представлена визуализация на блоке монитора схематичного отображения расположения блоков UWB датчиков пропорционально их установке на транспортном средстве. Диагностика блоков UWB датчиков: исправные блоки UWB датчиков отображаются зеленым цветом, неисправные - красным. Визуальное отображение на блоке монитора.
Система предотвращения столкновений 1 и способ работы этой системы разработаны для снижения риска столкновения транспортных средств с различными объектами системы. Блок оповещения системы оповещает водителя о присутствии в опасной зоне транспортных средств и/или персонала, определяет расстояние до объекта и его расположение. Блок монитора 13 отображает Информацию в реальном времени.
Система предотвращения столкновений 1 состоит из, включенных в систему предотвращения столкновений 1 устройств, по меньшей мере, одного блока устройства предотвращения столкновений 2, снабженного блоками UWB датчиков 7, установленного на автотранспорте, как минимум, одного блока персонального устройства 3, снабженного блоком UWB датчика 28, и закрепленного на, например, человеке, блока внешнего передающего устройства 5 и блока диспетчерского устройства 4.
Каждый блок устройства предотвращения столкновений 2 содержит N+1 блоков обнаружения препятствий 6, последовательно соединенных между собой и заключенных в герметичные корпуса. Каждый блок обнаружения препятствий 6 содержит блок UWB датчика 7 сверхширокополосного сигнала, блок светодиодов 8, блок питания 9 и блок микроконтроллера STM32 10 с блоком программного обеспечения 11. Блок устройства предотвращения столкновений 2 дополнительно содержит блок оповещения 12 с блоком монитора 13, выполненного с возможностью просмотра расположения опасно приближенных объектов, включая визуализацию их исправности и расположения относительно центральной оси и блоком динамика 14, выполненного с возможностью звукового оповещения. Блок устройства предотвращения столкновений 2 также дополнительно содержит блок согласования и уведомления 15, состоящий из: центрального блока 16 с блоком модуля опроса датчиков 17, блоком расчетно-аналитического модуля 18 и блоком модуля оповещения 19. Блок согласования и уведомления 15 дополнительно содержит блок преобразования напряжения 20 и блок РоЕ инжектора 21. Блок согласования и уведомления 15 подключен к бортовому питанию через блок преобразования напряжения 20, заключен в герметичный корпус и выполнен с обеспечением возможности удаленного просмотра данных и корректировки настроек. Соединения блоков обнаружения препятствий 6 с блоком согласования и уведомления 15 выполнены через кабель по протоколу RS 48522, причем для передачи данных все блоки системы используют Ethernet технологию.
Блок персонального устройства 3 содержит блок зарядки 23, блок вибромотора 24, блок микроконтроллера STM32 25 с блоком программного обеспечения 26, блок аккумулятора 27, блок UWB датчика 28, блок динамика 29, блок светодиодов 30 и блок кнопок 31 с блоком кнопки оповещения 32 и блоком кнопки питания 33. Блок персонального устройства 3 и выполнен с обеспечением возможности посылать оповещающие сигналы.
Блок диспетчерского устройства 4 содержит блок АРМ диспетчера 34 с блоком программного обеспечения 35 и блок сервера 36 и выполнено с возможностью мониторинга всей системы предотвращения столкновений 1 и связи со всеми устройствами предотвращения столкновений. Расстояния, входящие в опасную зону, корректируют как удаленно на блоке диспетчерского устройства 4, так и непосредственно на блоке устройства предотвращения столкновений 2.
Связи в блоках системы 1 распределены следующим образом:
В блоке обнаружения препятствий 6 блока устройства предотвращения столкновений 2 блок UWB датчика 7 связан односторонней входящей связью со своим блоком питания 9 и двусторонней связью со своим блоком микроконтроллера STM32 10, с блоками UWB датчиков 7 остальных блоков обнаружения препятствий 6 и блоком UWB датчика 7 блока персонального устройства 3, а блок питания 9 блока обнаружения препятствий 6 связан односторонней исходящей связью со своим блоком светодиодов 8 и со своим блоком микроконтроллера STM32 10, который, в свою очередь, связан односторонней исходящей связью с блоком светодиодов 8 и двусторонней связью с блоком модуля опроса датчиков 17 и соседним в цепи блоком обнаружения препятствий 6. Блок модуля опроса датчиков 17 центрального блока 16 блока согласования и уведомления 15 и блок расчетно-аналитического модуля 18 связаны двусторонней связью, а блок модуля оповещения 19 односторонней входящей связью с блоком расчетно-аналитического модуля 18 и исходящей с блоком оповещения 12. Блок оповещения 12 связан входящей связью с блоком преобразования напряжения 20, а блок РоЕ инжектора 21 связан двусторонней связью с блоком согласования и уведомления 15 и блоком внешнего передающего устройства 5, который, в свою очередь, связан двусторонней связью с блоком сервера 36 блока диспетчерского устройства 4.
Блок сервера 36 блока диспетчерского устройства 4 связан двусторонней связью с блоком АРМ диспетчера 34.
В блоке персонального устройства 3 блок кнопки оповещения 32 и блок кнопки питания 33 блока кнопок 31 связаны исходящей связью со своим блоком микроконтроллера STM32 25, а он, в свою очередь, связан входящей связью с блоком аккумулятора 27 и исходящей связью с блоками светодиодов 30, динамика 29 и вибромотора 24, а также двусторонне связан со своим блоком зарядки 23 и блоком UWB датчика 28, который связан входящей связью с блоком аккумулятора 27, а он исходящими связями с блоками вибромотора 24, динамика 29 и светодиодов 30 и двусторонней связью с блоком зарядки 23.
1. Система предотвращения столкновения по п. 1, отличающаяся тем, что блок диспетчерского устройства встроен в программное обеспечение автотранспорта.
2. Система предотвращения столкновений по п. 1, отличающаяся тем, что блок диспетчерского устройства расположен отдельно в офисе.
3. Система предотвращения столкновений по п. 1, отличающаяся тем, что блок внешнего передающего устройства выполнен в виде GSM-модема, WI-FI модема, радиомодема и т.п.
Система предотвращения столкновений работает следующим образом.
Способ работы системы предотвращения столкновений 1 заключается в том, что предварительно систему 1 приводят в рабочее состояние путем подачи питания. Затем определяют место нахождения блоков UWB датчиков 7 и 28 блоков устройств предотвращения столкновений 2 и блоков персональных устройств 3, находящиеся в зоне видимости посредством прослушивания эфира. Полученные с блоков UWB датчиков 7 и 28 сигналы с указанием собственного идентификатора периодически отправляют в блок модуля опроса датчиков 17 центрального блока 16 блока согласования и уведомления 15 блока устройства предотвращения столкновений 2. Далее посредством блока расчетно-аналитического модуля 18 производят замеры расстояния между видимыми блоками UWB датчиков 7 и 28 методом измерения времени прохождения радиосигнала до других блоков UWB датчиков 7 и 28, с умножением измеренного времени на скорость света. Список обнаруженных блоков UWB датчиков 7 и 28 сохраняют и периодически обновляют данные о расстояниях до них посредством повторных замеров. При этом автоматически передают все данные на блок сервера 36 блока диспетчерского устройства 4 и блок расчетно-аналитического модуля 18 блока устройства предотвращения столкновений 2, обеспечивая постоянный обмен данными между блоками устройств для непрерывного вычисления скорости сближения устройств системы 1.
В основе системы лежит принцип создания вокруг транспортного средства зон контроля опасных сближений. Зоны контроля могут быть любой формы и учитывают как особенности конструкции, так и параметры движения транспортного средства. Количество зон может быть любым и его настраивают исходя из запросов заказчика. Зоной является область, ограниченная двумя концентрическими окружностями с заданными радиусами. Каждая зона разделена на сектора (Фиг. 2, 3, 4).
Система сигнализирует о возможном опасном сближении и позволяет обратить внимание оператора техники на факт сближения с другим объектом.
Блоки UWB датчиков излучают в пространство вокруг транспортного средства UWB-сигнал в поиске других блоков UWB датчиков в зоне радиовидимости.
При обнаружении других блоков UWB датчиков система производит замер расстояния от блока UWB датчика до объекта.
Определение списка соседних блоков UWB датчиков в зоне видимости система производит методом прослушивания эфира и периодической отправкой сигнала с указанием собственного идентификатора.
Замер расстояния реализован методом измерения времени прохождения радиосигнала до других блоков UWB датчиков с умножением измеренного времени на скорость света.
При периодическом обновлении повторными замерами расстояния до других видимых блоков UWB датчиков, система вычисляет скорость сближения/отдаления объектов.
Данные о замерах расстояния система передаёт в центральный блок, где блок расчётно-аналитического модуля производит расчёт местоположения обнаруженных объектов по дальности, направлению и зоне.
На основании отобранных данных система производит расчет положения блока UWB датчика другой техники в пространстве, основываясь на том, что известно положение и направленность собственных блоков UWB датчиков.
Если другая техника "видится" одним блоком UWB датчика - положение вычисляется исходя из положения собственного блока UWB датчика, вектора основного направления блока UWB датчика и расстояния до искомой точки.
Если имеются замеры двух блоков UWB датчиков, то система вычисляет положение исходя из треугольника, составленного двумя собственными блоками UWB датчиков и искомой точкой
По трем блокам UWB датчиков составляется целевая функция метода оптимизации, минимизируя которую система вычисляет искомое положение. Первое приближение положения для метода оптимизации вычисляют как положение техники, произведенное по двум замерам.
По нескольким последовательно полученным искомым координатам техники в пространстве система определяет среднюю скорость и направление движение техники относительно собственной точки отсчета (геометрического центра положений собственных блоков UWB датчиков).
При изменении положения объектов системы:
1. Система производит экстраполяцию нового положения по ранее полученным данным о положении, скорости и направлении движения.
2. Экстраполированное положение объектов система сопоставляет с новым рассчитанным положением и производит корректировку данных о положении, скорости и направлении движения.
3. По полученным координатам объекта система производит оценку расстояния и направления до других объектов. При этом из расстояния вычитают собственные габариты, что позволяет показать расстояние до столкновения с другой техникой.
Результат расчёта, который система выводит на блок монитора, представляет собой графическую визуализацию расположения объектов относительно мобильного объекта.
Система оповещает о возможной аварии и позволяет обратить внимание оператора техники на факт сближения с другим объектом.
Оператор видит на блоке монитора, в какой зоне находится обнаруженный объект. По мере его приближения к транспортному средству, система отображает перемещение объекта из дальней зоны к ближней на блоке монитора. Также на блоке монитора в виде пиктограммы система отображает тип приближающегося объекта.
При входе объекта в зону сближения система активизирует звуковое оповещение. Тип звукового сигнала и возможность его изменения при переходе объекта из одной зоны в другую гибко настраивают. При выходе из максимально установленной зоны сближения система прекращает звуковое оповещение.
В центре блока монитора (Фиг. 2, 3, 4) система графически отображает зоны контроля, на которых показывает объекты, находящиеся вблизи транспортного средства системы предотвращения столкновений. В приведённом на фигурах примерах создано три зоны сближения. Если объект находится на расстоянии до 10 метров, сектор окрашен в красный цвет, от 10 до 20 метров - в желтый, от 20 до 120 метров - в зеленый. Находящиеся далее 120 метров объекты не регистрируются. Диапазон расстояний и количество секторов зон контроля по желанию можно настроить в конфигурационном файле.
Окрашенный сектор зоны контроля отображает расположение объекта относительно кабины водителя. Можно установить иконки, обозначающие любые виды объектов - грузовые автомобили, легковые автомобили, люди и т.д.
В правом верхнем углу блока монитора система схематично отображает расположение блоков UWB датчиков пропорционально их установке на транспортном средстве. Исправные блоки UWB датчиков окрашены зеленым цветом, неисправные - красным.
Используемые сокращения
LAN - Сетевые кабели - это сетевое оборудование, используемое для подключения одного сетевого устройства к другим сетевым устройствам или для подключения двух или более компьютеров к общим принтерам, сканерам и т.д.
PoE-инжектор это устройство, питающее сетевое оборудование через Ethernet-кабель. Это могут быть точки доступа WI-FI, IP-телефоны, IP-видеокамеры или аналогичные устройства
Терминирующее устройство - поглотитель энергии на конце длинной линии, сопротивление которого равно волновому сопротивлению данной линии.
Микроконтроллеры STM32 - это 32-битные микроконтроллеры производства компании STMicroelectronics. Каждый микроконтроллер состоит из ядра процессора, статической RAM-памяти, флеш-памяти, отладочного и различных периферийных интерфейсов.
Power+RS485 - стандарт промышленных сетей. Передача данных осуществляется с помощью дифференциальных сигналов, а это в свою очередь обеспечивает высокую устойчивость к синфазной помехе.
Все приведенные описания функционирования устройства подтверждают выполнение технической задачи данного изобретения, а именно создание новой системы предотвращения столкновений, с использованием сверхширокополосной связи с высокочастотным импульсом с малой энергией, которое обеспечивает надежное определение нахождения объектов в зоне опасности, расстояния до объектов и световое/звуковое и светографическое оповещение водителя об опасности столкновения с объектами без использования системы Интернет. А также сокращение неэффективных производственных затрат и повышение производительности работы персонала за счёт применения предлагаемого устройства.
Преимуществами предлагаемого решения является:
• Технология UWB, использующая в качестве несущей сверхширокополосные сигналы, что обеспечивает отсутствие радиопомех. Кроме того, чем больше ширина канала, тем большее количество устройств может без помех работать на этом канале. Информационная вместимость UWB значительно больше в сравнении с другими технологиями, что позволяет реализовывать более быстродействующие беспроводные сети высокой пропускной способностью.
• Идентификация объектов сближения. Определение списка соседних датчиков в зоне видимости производится методом прослушивания эфира и периодической отправкой сигнала "маяка" с указанием собственного идентификатора. Таким образом, каждый приближающийся объект идентифицируется индивидуально.
Все приведенные описания функционирования системы подтверждают выполнение технической задачи данного изобретения, а именно, снижение риска столкновения транспортных средств с мобильными объектами либо с персоналом, оповещение водителя о присутствии в опасной зоне транспортных средств или персонала, определение расстояния до объекта и его расположения относительно мобильного объекта, сокращение неэффективных производственных затрат, повышение производительности работы персонала.
Промышленная применимость
Все вышеизложенное говорит о промышленной применимости устройства для организации предотвращения столкновений - Системы предотвращения столкновений
Перечень позиций.
1. Система предотвращения столкновений,
2. блок устройства предотвращения столкновений,
3. блок персонального устройства,
4. блок диспетчерского устройства,
5. блок внешнего передающего устройства,
6. блоков обнаружения препятствий,
7. блок UWB датчика,
8. блок светодиодов,
9. блок питания,
10. блок микроконтроллера STM32,
11. блок программного обеспечения,
12. блок оповещения,
13. блок монитора,
14. блок динамика,
15. блок согласования и уведомления,
16. центральный блок,
17. блок модуля опроса датчиков,
18. блок расчетно-аналитического модуля,
19. блок модуля оповещения,
20. блок преобразования напряжения,
21. блок РоЕ инжектора,
22. кабель RS 485,
23. блок зарядки,
24. блок вибромотора,
25. блок микроконтроллера STM32,
26. блок программного обеспечения,
27. блок аккумулятора,
28. блок UWB датчика,
29. блок динамика,
30. блок светодиодов,
31. блок кнопок,
32. блок кнопки оповещения,
33. блок кнопки питания,
34. блок АРМ диспетчера,
35. блок программного обеспечения,
36. блок сервера.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ КОВША ЭКСКАВАТОРА ДЛЯ БЛОЧНОЙ МОДЕЛИ ГОРНОГО ПРЕДПРИЯТИЯ | 2024 |
|
RU2831442C1 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И УПРАВЛЕНИЯ МУНИЦИПАЛЬНОГО И/ИЛИ ОБЪЕКТОВОГО УРОВНЯ ПРИ УГРОЗЕ, ВОЗНИКНОВЕНИИ, В ХОДЕ И ПРИ ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2015 |
|
RU2605505C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| Система контроля и мониторинга маршрутизированных автотранспортных средств | 2018 |
|
RU2712404C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ КОМПЛЕКСНОЙ БЕЗОПАСНОСТИ НА ВОДНЫХ ОБЪЕКТАХ | 2022 |
|
RU2796646C1 |
| Радиоканальная система кардиомониторинга, предупреждения и действий в критических ситуациях | 2016 |
|
RU2630126C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КОНТРОЛЯ УТЕЧКИ ГАЗА | 2017 |
|
RU2666324C2 |
| Радиоканальная система кардиомониторинга и предупреждения критических ситуаций | 2016 |
|
RU2646128C2 |
Изобретение относится к системам управления дорожным транспортом, а именно, к системам предотвращения столкновений и работе таких систем. Способ работы системы предотвращения столкновений заключается в том, что предварительно систему приводят в рабочее состояние путем подачи питания, затем определяют место нахождения блоков UWB датчиков блоков устройств предотвращения столкновений и блоков персональных устройств, находящиеся в зоне видимости посредством прослушивания эфира. При этом полученные с блоков UWB датчиков сигналы с указанием собственного идентификатора периодически отправляют в блок модуля опроса датчиков центрального блока устройства предотвращения столкновений, после чего посредством блока расчетно-аналитического модуля производят замеры расстояния между видимыми блоками UWB датчиков методом измерения времени прохождения радиосигнала до других блоков UWB датчиков, с умножением измеренного времени на скорость света. При этом сохраняют список обнаруженных блоков UWB датчиков и периодически обновляют данные о расстояниях до них посредством повторных замеров, при этом автоматически передают все данные на блок сервера блока диспетчерского устройства и блок расчетно-аналитического модуля блок устройства предотвращения столкновений, обеспечивая постоянный обмен данными между блоками устройств для непрерывного вычисления скорости сближения устройств системы. Технический результат – расширение области применения систем предотвращения столкновений путем использования сверхширокополосной связи с высокочастотным импульсом с малой энергией. 2 н. и 2 з.п. ф-лы, 4 ил.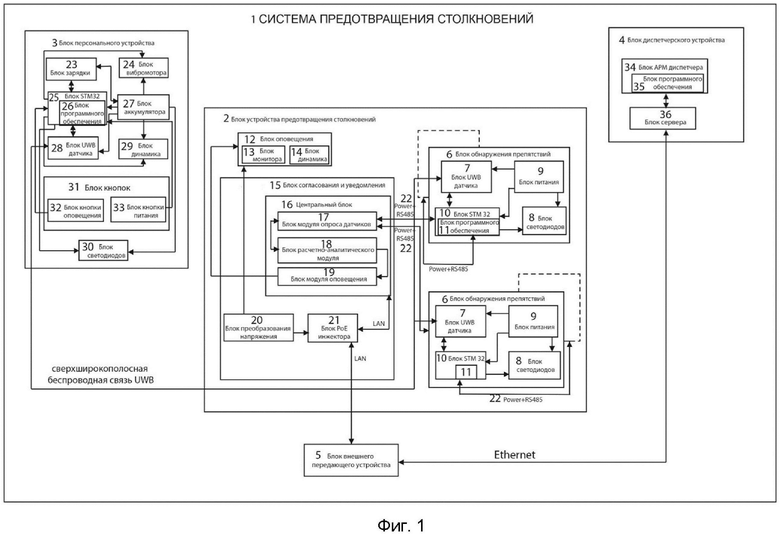
1. Система предотвращения столкновений, состоящая из включенных в систему предотвращения столкновений устройств, по меньшей мере, одного блока устройства предотвращения столкновений, снабженного блоками UWB датчиков, установленного на автотранспорте, как минимум, одного блока персонального устройства, снабженного блоком UWB датчика, блока внешнего передающего устройства и блока диспетчерского устройства, причем каждый блок устройства предотвращения столкновений содержит N+1 блоков обнаружения препятствий, последовательно соединенных между собой и заключенных в герметичные корпуса, причем каждый блок обнаружения препятствий содержит блок UWB датчика сверхширокополосного сигнала, блок светодиодов, блок питания и блок микроконтроллера STM32 с блоком программного обеспечения, при этом блок устройства предотвращения столкновений дополнительно содержит блок оповещения с блоком монитора, выполненного с возможностью просмотра расположения опасно приближенных объектов, включая визуализацию их исправности и расположения относительно центральной оси и блоком динамика, выполненного с возможностью звукового оповещения, а также блок устройства предотвращения столкновений дополнительно содержит блок согласования и уведомления, состоящий из: центрального блока с блоком модуля опроса датчиков, блоком расчетно-аналитического модуля и блоком модуля оповещения, при этом блок согласования и уведомления дополнительно содержит блок преобразования напряжения, блок РоЕ инжектора, причем блок согласования и уведомления подключен к бортовому питанию через блок преобразования напряжения и также заключен в герметичный корпус и выполнен с обеспечением возможности удаленного просмотра данных и корректировки настроек, а соединения блоков обнаружения препятствий с блоком согласования и уведомления выполнены через кабель по протоколу RS 485, причем для передачи данных все блоки системы используют Ethernet технологию, а блок персонального устройства содержит блок зарядки, блок вибромотора, блок микроконтроллера STM32 с блоком программного обеспечения, блок аккумулятора, блок UWB датчика, блок динамика, блок светодиодов и блок кнопок с блоком кнопки оповещения и блоком кнопки питания, причем блок персонального устройства и выполнен с обеспечением возможности посылать оповещающие сигналы, при этом блок диспетчерского устройства содержит блок АРМ диспетчера с блоком программного обеспечения и блок сервера и выполнено с возможностью мониторинга всей системы предотвращения столкновений и связи со всеми устройствами предотвращения столкновений, при этом расстояния, входящие в опасную зону корректируют, как удаленно на блоке диспетчерского устройства, так и непосредственно на блоке устройства предотвращения столкновений, причем связи в блоках системы распределены следующим образом: в блоке обнаружения препятствий блока устройства предотвращения столкновений блок UWB датчика связан односторонней входящей связью со своим блоком питания и двусторонней связью со своим блоком микроконтроллера STM32, с блоками UWB датчиков остальных блоков обнаружения препятствий и блоком UWB датчика блока персонального устройства, а блок питания блока обнаружения препятствий связан односторонней исходящей связью со своим блоком светодиодов и со своим блоком микроконтроллера STM32, который, в свою очередь, связан односторонней исходящей связью с блоком светодиодов и двусторонней связью с блоком модуля опроса датчиков и соседним в цепи блоком обнаружения препятствий, при этом блок модуля опроса датчиков центрального блока блока согласования и уведомления и блок расчетно-аналитического модуля связаны двусторонней связью, а блок модуля оповещения односторонней входящей связью с блоком расчетно-аналитического модуля и исходящей с блоком оповещения, причем блок оповещения связан входящей связью с блоком преобразования напряжения, а блок РоЕ инжектора связан двусторонней связью с блоком согласования и уведомления и блоком внешнего передающего устройства, который, в свою очередь, связан двусторонней связью с блоком сервера блока диспетчерского устройства, при этом этот блок сервера связан двусторонней связью с блоком АРМ диспетчера, причем в блоке персонального устройства блок кнопки оповещения и блок кнопки питания блока кнопок связаны исходящей связью со своим блоком микроконтроллера STM32, а он, в свою очередь, связан входящей связью с блоком аккумулятора и исходящей связью с блоками светодиодов, динамика и вибромотора, а также двусторонне связан со своим блоком зарядки и блоком UWB датчика, который связан входящей связью с блоком аккумулятора, а он исходящими связями с блоками вибромотора, динамика и светодиодов и двусторонней связью с блоком зарядки.
2. Система предотвращения столкновений по п. 1, отличающаяся тем, что блок диспетчерского устройства расположен отдельно в офисе.
3. Система предотвращения столкновений по п. 1, отличающаяся тем, что блок внешнего передающего устройства выполнен в виде GSM-модема или WI-FI модема или радиомодема.
4. Способ работы системы предотвращения столкновений, заключающийся в том, что предварительно систему приводят в рабочее состояние путем подачи питания, затем определяют место нахождения блоков UWB датчиков блоков устройств предотвращения столкновений и блоков персональных устройств, находящиеся в зоне видимости посредством прослушивания эфира, при этом полученные с блоков UWB датчиков сигналы с указанием собственного идентификатора периодически отправляют в блок модуля опроса датчиков центрального блока блока согласования и уведомления блока устройства предотвращения столкновений, после чего посредством блока расчетно-аналитического модуля производят замеры расстояния между видимыми блоками UWB датчиков методом измерения времени прохождения радиосигнала до других блоков UWB датчиков, с умножением измеренного времени на скорость света, при этом сохраняют список обнаруженных блоков UWB датчиков и периодически обновляют данные о расстояниях до них посредством повторных замеров, при этом автоматически передают все данные на блок сервера блока диспетчерского устройства и блок расчетно-аналитического модуля блок устройства предотвращения столкновений, обеспечивая постоянный обмен данными между блоками устройств для непрерывного вычисления скорости сближения устройств системы.
| Система противоаварийной безопасности | 2019 |
|
RU2715599C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2000 |
|
RU2169929C1 |
| SU 915035 A1, 23.03.1982 | |||
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

