Изобретение относится к горной промышленности, а именно к системам автоматизированного управления горно-транспортными работами в карьерах с применением экскаваторно-автомобильного комплекса и может быть использована для высокоточного определения состава пород в процессе добычи.
Задачей предлагаемого изобретения является создание системы высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия с обеспечением определения состава и высокоточной выемки пород.
Техническим результатом предлагаемого изобретения является создание системы высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия, позволяющей повысить точность выполнения плановых показателей качества, обеспечить необходимую точность шихтовки, оптимизировать определения состава породы, снизить неправильно назначаемые рейсы и объем выполняемых вручную изысканий, снизить потребление электроэнергии и топлива при производстве добычных работ.
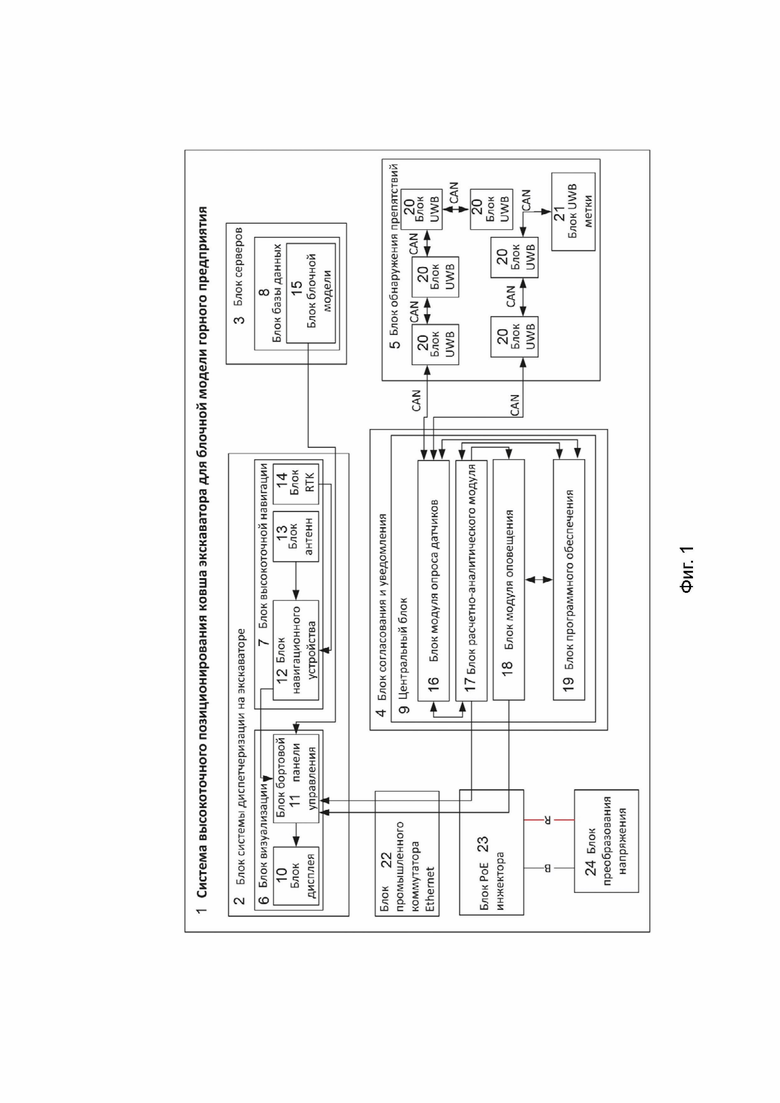
Задача выполнена, технический результат достигнут за счёт того, что система высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия 1 состоит из: блока согласования и уведомления 4, блока системы диспетчеризации на экскаваторе 2, блока серверов 3, блока обнаружения препятствий 5, блока промышленного коммутатора Ethernet 22, блока PoE инжектора 23, блока преобразования напряжения 24. Блок согласования и уведомления 4 содержит центральный блок 9, состоящий из блока модуля опроса датчиков 16, блока расчетно-аналитического модуля 17, блок модуля оповещения 18, блока программного обеспечения 19. Блок системы диспетчеризации на экскаваторе 2 содержит блок визуализации 6 и блок высокоточной навигации 7. Блок серверов 3 содержит блок базы данных 8. Блок обнаружения препятствий 5 содержит 1+n блоков UWB 20, установленных на экскаваторе и блок UWB метки 21, установленного на ковше экскаватора. Блок визуализации 6 в свою очередь содержит блок дисплея 10 и блок бортовой панели управления 11. Блок высокоточной навигации 7 содержит блок навигационного устройства 12, блок антенн 13 и блок RTK 14. Блок базы данных 8 содержит блок блочной модели 15. Блок модуля опроса датчиков 16 соединён двусторонней связью с блоком расчетно-аналитического модуля 17 и с блоком программного обеспечения 19, а также с двумя последовательными линиями блоков UWB 20 и блоков UWB 20 с блоком UWB метки 21 по CAN стандарту. Блок расчетно-аналитического модуля 17 связан двусторонней связью с блоком программного обеспечения 19 и исходящими связями с блоком бортовой панели управления 11 через блоки промышленного коммутатора Ethernet 22 и блок PoE инжектора 23, и блоком модуля оповещения 18, который в свою очередь связан двусторонней связью с блоком программного обеспечения 19 и исходящей связью с блоком бортовой панели управления 11 через блоки промышленного коммутатора Ethernet 22 и блок PoE инжектора 23. Блок бортовой панели управления 11 дополнительно связан входящей связью с блоком навигационного устройства 12, с блоком блочной модели 15 и исходящей связью с блоком дисплея 10. Блок навигационного устройства 12 связан входящей связью с блоком антенн 13 и блоком RTK 14.
Раскрытие изобретения
На фиг. 1 - Изображена функциональная схема.
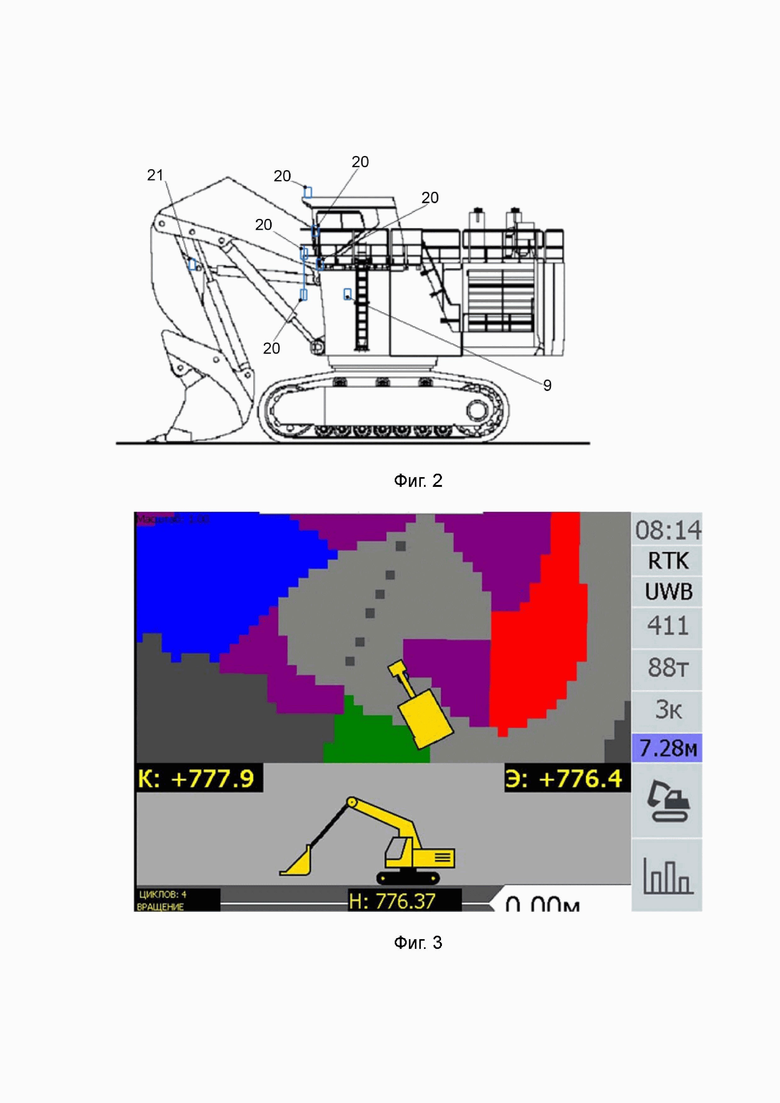
На фиг. 2 – Изображен один из вариантов установки элементов системы.
На фиг. 3 – Изображен вариант визуализации на дисплее машиниста работы системы.
Функциональные задачи блоков системы высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия:
блок бортовой панели управления 11 обеспечивает обработку данных, полученных от блока согласования и уведомлений 4 и блока высокоточной навигации 7 с последующим наложением полученных данных на карту;
блок дисплея 10 обеспечивает отображение карты с блочной моделью, положения экскаватора и ковша экскаватора на карте;
блок навигационного устройства 12 предназначен для отправки данных о положении экскаватора на местности;
блок антенн 13 обеспечивает получение глобальных координат GPS/ГЛОНАС и азимута поворота экскаватора;
блок RTK 14, предназначен для получения плановых координат и высот точек местности сантиметровой точности с помощью спутниковой системы навигации посредством получения поправок с базовой станции, принимаемых на блок навигационного устройства 12.
Блоки системы высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия работает следующим образом:
Предварительно систему приводят в рабочее состояние путем подачи питания, затем определяют место нахождения блоков UWB 20, находящихся на борту экскаватора и блока UWB метки 21 на ковше экскаватора, находящегося в зоне видимости посредством прослушивания эфира. При этом полученные с блоков UWB 20 сигналы с указанием собственного идентификатора периодически отправляют в блок модуля опроса датчиков 16 блока согласования и уведомления 4, после чего посредством блока расчетно-аналитического модуля 17 производят замеры расстояния между видимыми блоками UWB 20 на борту экскаватора методом измерения времени прохождения радиосигнала до блока UWB метки 21 на ковше экскаватора, с умножением измеренного времени на скорость света. При этом периодически обновляют данные о расстояниях посредством повторных замеров, при этом автоматически передают все данные на блок системы диспетчеризации на экскаваторе 2 через блок расчетно-аналитического модуля 17 блока согласования и уведомления 4, обеспечивая постоянный обмен данными между блоками устройств для непрерывного вычисления скорости сближения устройств системы.
Блок навигационного устройства 12 вычисляет координату точки центра вращения, путем вычислений размеров экскаватора.
В блоке бортовой панели управления 11 назначают координаты точки ковша экскаватора, полученные от блока навигационного устройства 12 и применяют к данным координатам рассчитанную поправку от блока расчетно-аналитического модуля 17 блока согласования и уведомлений 4.
Система высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия работает следующим образом (в экскаваторе):
1. С блока сервера 3 на блок бортовой панели управления 11 (например БПУ-МК-01) поступает загруженная блочная модель и отображается определенными цветами на блоке дисплея 10.
2. Машинист экскаватора, подъезжая в забой, видит на блоке дисплея 10 блочную модель.
3. Позиционирование экскаватора осуществляют оборудованием ГНСС, состоящим из блока навигационного устройства 12 (например БУН-МК-02 ГНСС) и блока антенн 13 ГНСС (координатная – отвечает за координаты и векторная – отвечает за направление движения) с точностью 0,3 м по глобальному позиционированию используя дифференциальную поправку вблизи предприятия.
4. Позиционирование ковша экскаватора осуществляется добавлением расстояния от блока UWB метки 21 до центра экскаватора в блоке бортовой панели управления 11.
5. Расстояние до UWB метки 21 (может находиться как на рукояти, так и на ковше) высчитывают на Центральном блоке 9 относительно блоков UWB 20, находящихся на борту экскаватора
6. Итоговое расположение ковша экскаватора, обработанное в блоке бортовой панели управления 11 отображается на блоке дисплея 10 в проекциях сбоку и сверху.
7. На блоке дисплея 10 отображается минимальное расстояние до рудного тела для черпания в виде точки на выбранном машинистом рудном контуре.
8. Данные по координатам черпания ковша экскаватора отправляют в блоке серверов 3 и эти данные служат для формирования отчета по черпаниям ковша экскаватора и выгрузки данных в ГГИС предприятия
Использование предлагаемой системы повысит учёт качества извлекаемой руды, так как машинист сможет контролировать это ещё в процессе извлечения руды из карьера, благодаря установленному в кабине монитору. Также система упростит процесс шихтования руды на складе.
На каждый экскаватор устанавливают оборудование, входящее в состав предлагаемой системы, с помощью которого определяют местоположение ковша экскаватора с сантиметровой точностью. На панели в кабине машиниста отображается рудная модель карьера, на которой он видит содержание полезного материала в карьере и понимает где содержится руда и какого она качества, а где пустая порода. При погрузке автосамосвала система автоматически усредняет качество погруженной массы с учётом содержания в месте черпания. Далее, после попадания руды на склад, система автоматически шихтует качество по складу.
Предлагаемая система позволяет получать информацию о содержании химических компонентов руды в конкретной точке карьера и рассчитывать траекторию прохождения экскаватора по контуру добычи (рис. 4), иметь точные данные о находящейся в работе горной технике и транспорте. Программный продукт дает возможность рассчитывать оптимальный маршрут движения для каждого самосвала, чтобы обеспечить одинаковое среднее содержание меди при подаче на фабрику, рассчитывать динамику пополнения и разгрузки временных складов руды, иметь в распоряжении страховой запас на случай нарушения движения самосвалов.
Основная цель геологоразведочных работ заключается в исследовании геологических структур и обнаружении полезных ископаемых. Другая задача — их подготовка к последующей промышленной разработке. Вместе с этим проводится определение закономерности залегания жил, для чего изучаются условия их образования, составление условной истории формирования. Итогом такой разведки является формирование геолого-экономической оценки промышленного освоения.
Сегодня задействуют также 3D-визуализация, анализ инфракрасного и ультрафиолетового спектра, радиологическое исследование.
Аэрокосмическая съемка позволяет выполнить только наружное обследование геологических пород. Чтобы составить примерный план строения верхней части разреза горных пород, выполняется геологическая разведка «на глубину».
Маркшейдерская съемка — комплекс линейных, угловых измерений и вычислений, осуществляемых на объекте недропользования для оценки пространственной ориентации горных выработок, а также подземных и наземных сооружений, природных объектов в границах горного отвода.
На основании результатов вышеперечисленных геологоразведочных работ составляют блочную модель.
Список сокращений
CAN (англ. Controller Area Network - сеть контроллеров) стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи последовательный, широковещательный, пакетный.
PoЕ передача электроэнергии через Ethernet (power over Ethernet) технология, позволяющая передавать удалённому устройству электрическую энергию вместе с данными через стандартную витую пару в сети Ethernet Данная технология предназначается для IP телефонии точек доступа беспроводных сетей, IP камер, сетевых концентраторов и других устройств, к которым нежелательно или невозможно проводить отдельный электрический кабель.
UWB (англ. Ultra Wide Band сверхширокая полоса, СШП) это беспроводная технология связи на малых расстояниях при низких затратах энергии, использующая в качестве несущей сверхширокополосные сигналы с крайне низкой спектральной плотностью мощности.
TCP/IP сетевая модель передачи данных, представленных в цифровом виде. Модель описывает способ передачи данных от источника информац ии к получателю. В модели предполагается прохождение информации через четыре уровня, каждый из которых описывается правилом (протоколом передачи).
RTK Real Time Band (в переводе с англ. кинематика реального времени) совокупность приёмов и методов получения плановых координат и высот точек местности сантиметровой точности с помощью спутниковой системы навигации посредством получения поправок с базовой станции, принимаемых аппаратурой пользователя во время съёмки. Является одним из методов DGPS.
Перечень позиций:
1. Система высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия
2. Блок системы диспетчеризации на экскаваторе
3. Блок серверов
4. Блок согласования и уведомления
5. Блок обнаружения препятствий
6. Блок визуализации
7. Блок высокоточной навигации
8. Блок базы данных
9. Центральный блок
10. Блок дисплея
11. Блок бортовой панели управления
12. Блок навигационного устройства
13. Блок антенн
14. Блок RTK
15. Блок блочной модели
16. Блок модуля опроса датчиков
17. Блок расчетно-аналитического модуля
18. Блок модуля оповещения
19. Блок программного обеспечения
20. Блок UWB
21. Блок UWB метки
22. Блок промышленного коммутатора Ethernet
23. Блок РоЕ инжектора
24. Блок преобразования напряжения
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ районирования экскаваторных забоев для управления работой экскаваторно-автомобильных комплексов | 2020 |
|
RU2738919C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИНАМИЧЕСКИХ УСИЛИЙ В МЕХАНИЗМЕ ЭКСКАВАТОРА | 2012 |
|
RU2521625C2 |
| СПОСОБ СЕЛЕКТИВНОЙ ВЫЕМКИ РУД | 2013 |
|
RU2537451C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ И СПОСОБ РАБОТЫ ЭТОЙ СИСТЕМЫ | 2021 |
|
RU2778626C1 |
| СПОСОБ ВЕДЕНИЯ БУРОВЗРЫВНЫХ РАБОТ | 2012 |
|
RU2521629C2 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ОПЕРАТОРОВ КАРЬЕРНЫХ ЭКСКАВАТОРОВ | 2022 |
|
RU2799040C1 |
| Система помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831762C1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
Изобретение относится к горной промышленности. Технический результат заключается в повышении точности позиционирования ковша экскаватора для блочной модели горного предприятия. Такой результат достигается тем, что с блока сервера на блок бортовой панели управления поступает загруженная блочная модель и отображается определенными цветами на блоке дисплея. Позиционирование экскаватора осуществляют оборудованием, состоящим из блока навигационного устройства и блока антен с точностью 0,3 м по глобальному позиционированию, используя дифференциальную поправку вблизи предприятия. Позиционирование ковша экскаватора осуществляется добавлением расстояния от блока UWB метки до центра экскаватора в блоке бортовой панели управления. Расстояние до UWB метки высчитывают на центральном блоке относительно блока UWB, находящихся на борту экскаватора. Итоговое расположение ковша экскаватора, обработанное в блоке бортовой панели управления, отображается на блоке дисплея. На блоке дисплея отображается минимальное расстояние до рудного тела для черпания в виде точки на выбранном машинистом рудном контуре. Данные по координатам черпания ковша экскаватора отправляют в блок серверов, и эти данные служат для формирования отчета по черпаниям ковша экскаватора и выгрузки данных. 3 ил.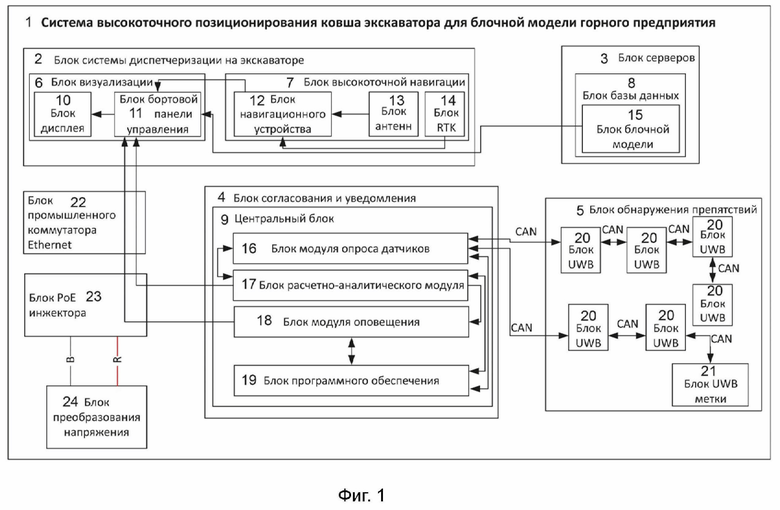
Система высокоточного позиционирования ковша экскаватора для блочной модели горного предприятия (1) состоит из: блока согласования и уведомления (4), блока системы диспетчеризации на экскаваторе (2), блока серверов (3), блока обнаружения препятствий (5), блока промышленного коммутатора Ethernet (22), блока PoE инжектора (23), блока преобразования напряжения (24), при этом блок согласования и уведомления (4) содержит центральный блок (9), состоящий из блока модуля опроса датчиков (16), блока расчетно-аналитического модуля (17), блок модуля оповещения (18), блока программного обеспечения (19), а блок системы диспетчеризации на экскаваторе (2) содержит блок визуализации (6) и блок высокоточной навигации (7), причем блок серверов (3) содержит блок базы данных (8), а блок обнаружения препятствий (5) содержит 1+n блоков UWB (20), установленных на экскаваторе, и блок UWB метки (21), установленный на ковше экскаватора, блок визуализации (6) в свою очередь содержит блок дисплея (10) и блок бортовой панели управления (11), при этом блок высокоточной навигации (7) содержит блок навигационного устройства (12), блок антенн (13) и блок RTK (14), а блок базы данных (8) содержит блок блочной модели (15), при этом блок модуля опроса датчиков (16) соединён двусторонней связью с блоком расчетно-аналитического модуля (17) и с блоком программного обеспечения (19), а также с двумя последовательными линиями блоков UWB (20) и блоков UWB (20) с блоком UWB метки (21) по CAN стандарту; в свою очередь блок расчетно-аналитического модуля (17) связан двусторонней связью с блоком программного обеспечения (19) и исходящими связями с блоком бортовой панели управления (11) через блоки промышленного коммутатора Ethernet (22) и блок PoE инжектора (23), и блоком модуля оповещения (18), который в свою очередь связан двусторонней связью с блоком программного обеспечения (19) и исходящей связью с блоком бортовой панели управления (11) через блоки промышленного коммутатора Ethernet (22) и блок PoE инжектора (23); блок бортовой панели управления (11) дополнительно связан входящей связью с блоком навигационного устройства (12), с блоком блочной модели (15) и исходящей связью с блоком дисплея (10), в свою очередь блок навигационного устройства (12) связан входящей связью с блоком антенн (13) и блоком RTK (14).
| СПОСОБ И СИСТЕМА АНТИСТОЛКНОВИТЕЛЬНОГО ОБНАРУЖЕНИЯ И УПРАВЛЕНИЯ, СИСТЕМА ВИЛОЧНОГО ПОГРУЗЧИКА И ВИЛОЧНЫЙ ПОГРУЗЧИК | 2023 |
|
RU2808685C1 |
| US 2017103506 A1, 13.04.2017 | |||
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА МОНИТОРИНГА РАБОЧЕГО СОСТОЯНИЯ ТЯЖЕЛОГО ОБОРУДОВАНИЯ, ТАКОГО КАК КАРЬЕРНЫЙ ЭКСКАВАТОР | 2018 |
|
RU2772929C1 |
| Система противоаварийной безопасности | 2019 |
|
RU2715599C1 |
| Токарный резец | 1924 |
|
SU2016A1 |

