Изобретение касается устройства для определения положения объекта, движущегося в области высокого давления. Изобретение касается также применения этого устройства.
Такие устройства известны из уровня техники. Например, для определения положения охлаждаемых газом электродвигателей применяются сенсоры, имеющие гибкие электрические провода. Эти гибкие электрические провода состоят, например, из системы из нескольких или многих тонких проволок, которые свиты друг с другом (называемой также жилой). Эта жила окружена изолятором для электрической изоляции. Между проволоками жилы, а также между изолятором и жилой обычно образуются полости, которые наполнены воздухом. Когда такой гибкий провод эксплуатируется в газовой атмосфере, в частности в области высокого давления, газ вследствие диффузионных процессов может проникать в эти полости, пока давление газа в полости не будет равно давлению газа внешней газовой атмосферы.
При понижении давления в области высокого давления давление газа в описанных полостях понижается только очень медленно, пока этот процесс по-прежнему основывается на диффузии. Это разностное давление может вредить изоляции гибкого провода. Для уменьшения риска такого повреждения провода могут располагаться, например, внутри эластомерного рукава или металлического гофрированного рукава, причем эти рукава наполняются жидкостью. Также известно применение погружных труб, при этом на одном конце погружной трубы находится сенсор, и его провода проложены в области низкого давления внутри погружной трубы.
US 4 066 949 A раскрывает систему держателя зонда, имеющую держатель зонда, который свободно несущим образом смонтирован в опорной структуре. Эта опорная структура включает в себя обычно продолговатый цилиндрический корпус. Продолговатый свободный конец держателя распространяется по существу коаксиально внутри корпуса. Держатель имеет пару находящихся на расстоянии друг от друга, распространяющихся в окружном направлении пазов, которые выполнены вблизи свободного конца держателя на его наружной поверхности. В каждом из пазов расположено упругое кольцо, при этом наружная поверхность каждого кольца находится в контакте с внутренней поверхностью некоторого участка корпуса, чтобы образовывать упругую опорную структуру для держателя внутри корпуса.
US 3 859 847 A раскрывает устройство для контроля вибраций, имеющее рейтер вала для контроля радиального движения вибрации вращающегося вала. Этот рейтер вала преднапряжен винтовой пружиной относительно периметра вала. На рейтере вала вблизи вала расположен акселерометр для измерения вибраций. Сигнал ускорения передается от акселерометра в электронный модуль на верхней или наружной части крышки подшипника, в которой расположены рейтер вала, винтовая пружина и акселерометр.
В основе изобретения лежит задача, предложить улучшенное по сравнению с уровнем техники устройство для определения положения объекта, движущегося в области высокого давления. Также в основе изобретения лежит задача, предложить применение для этого устройства.
В отношении устройства задача в соответствии с изобретением решается с помощью признаков, указанных в п.1 формулы изобретения. В отношении применения задача в соответствии с изобретением решается с помощью признаков, указанных в п.11 формулы изобретения.
Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Предлагаемое изобретением устройство для определения положения объекта, движущегося в области высокого давления, включает в себя блок регистрации, имеющий по меньшей мере один сенсор для регистрации положения объекта и подачи сигнала положения, сигнализирующего о положении объекта, и сенсорный провод для передачи сигнала положения в блок аналитической обработки, который, в частности, расположен в области низкого давления, находящейся вне области высокого давления. При этом сенсор расположен на обращенном к объекту и стационарно расположенном в области высокого давления конце несущего узла, причем этот несущий узел имеет гибкий участок, который расположен между стационарным концом и участком, проведенным через ограничивающий область высокого давления корпус, и при этом сенсорный провод блока регистрации через гибкий участок и через проходящий через корпус участок выведен из области высокого давления.
Предлагаемое изобретением устройство использует так называемый принцип погружной трубы, при этом выполненный в виде погружной трубы несущий узел разделен на три участка.
Первый участок включает в себя стационарный конец, имеющий сенсор, который предусмотрен для регистрации положения объекта, в частности абсолютного положения объекта в области высокого давления, и который одновременно образует барьер давления между областью высокого давления и внутренним пространством несущего узла. Внутреннее пространство несущего узла образует при этом область низкого давления. Сенсор включает в себя, например, сенсорную головку и держатель сенсора, при этом в держателе сенсора помещается сенсорная головка. Держатель сенсора вместе с сенсорной головкой размещен как можно ближе к поверхности объекта и стационарно расположен в области высокого давления. Таким образом, у описанного устройства сенсорная головка размещена в области высокого давления, при этом сенсорные провода проходят в области низкого давления.
Второй участок включает в себя гибкий участок и расположен между первым и третьим участком. В этом гибком участке расположены сенсорные провода, которые выводятся из корпуса через третий участок. Этот гибкий участок обеспечивает возможность механической гибкости сенсорных проводов без изменения абсолютного положения сенсора в области высокого давления, а также положения третьего участка.
Третий участок, как и первый участок, стационарен, в частности стационарен по отношению к корпусу, и служит для уплотнения несущего узла в корпусе.
Выполненное таким образом устройство обеспечивает возможность точных измерений абсолютного положения объекта в области высокого давления. Тепловые изменения длины несущего узла, благодаря гибкому участку, не имеют или имеют по меньшей мере только пренебрежимо малое влияние на регистрацию положения. К тому же посредством этого гибкого участка уменьшаются передачи вибраций из области корпуса на сенсор. Помимо этого, устройство обеспечивает возможность простого монтажа/демонтажа сенсора через отверстие в корпусе, сквозь которое продет третий участок несущего узла. Дополнительные отверстия для монтажа/демонтажа не требуются.
В одном из вариантов осуществления гибкий участок по своей длине образует пружину растяжения или пружину сжатия. Таким образом, гибкий участок может сокращаться или удлиняться, при этом абсолютное положение стационарного конца, в котором помещается сенсор, несущего узла в области высокого давления, а также положение несущего узла в корпусе остаются неизменными. Тем самым может компенсироваться тепловое влияние, в частности тепловое изменение длины несущего узла, на сенсор.
Например, гибкий участок проходит, начинаясь от стационарного конца, прямолинейно в направлении корпуса и имеет механически гибкий материал. В частности, материал поверхности оболочки, которая ограничивает внутреннюю область низкого давления несущего узла, состоит из механически гибкого материала. Посредством этого материала гибкий участок может растягиваться или сокращаться под влиянием тепла. Например, этот материал при тепле растягивается, а при отборе тепла соответственно стягивается. Для этого несущий узел выполнен, например, в виде металлической гофрированной трубы. На проходящий внутри гибкого участка сенсорный провод, а также стационарные положения других участков несущего узла это не влияет.
В другом варианте осуществления гибкий участок образован выполненным в виде трубчатой спирали отрезком направляющей трубы, через который проведен сенсорный провод, причем этот выполненный в виде трубчатой спирали отрезок может быть расположен вокруг и/или внутри несущей трубы, в частности вокруг жесткой и/или внутри жесткой несущей трубы. Выполненный в виде трубчатой спирали отрезок позволяет получить упругую структуру в компактной конфигурации. Несущая труба служит для гарантии стационарного положения сенсора в области высокого давления.
Выполненный в виде трубчатой спирали отрезок, в частности гибко, закреплен на и/или в несущей трубе. Например, этот отрезок закреплен на и/или в несущей трубе посредством скоб или ребер, благодаря чему могут компенсироваться передаваемые на несущую трубу вибрации. При этом охватывающая этот отрезок направляющая труба может быть либо частично расположена вокруг несущей трубы, либо полностью внутри несущей трубы. Например, каждый из концов направляющей трубы, которые не выполнены спиралеобразно, расположены внутри несущей трубы. Выполненный в виде трубчатой спирали отрезок расположен вне несущей трубы вокруг нее. Несущая труба включает в себя соответствующие отверстия или вырезы для продевания направляющей трубы. Если направляющая труба полностью расположена внутри несущей трубы, диаметр несущей трубы в области выполненного в виде трубчатой спирали отрезка может быть больше, чем в других областях. В области сенсора диаметр несущей трубы может сужаться в целях экономии площади. К тому же в этом случае можно обойтись без отверстий или вырезов в несущей трубе.
В одном из примеров осуществления на одном конце направляющей трубы закреплен сенсор, причем этот конец расположен внутри несущей трубы. Это обеспечивает возможность крепления сенсора и гарантии стационарного положения.
Крепление сенсора к направляющей трубе может осуществляться посредством сваривания, склеивания или винтового соединения, в частности посредством винтового соединения с врезным кольцом. Альтернативно сенсор может также находиться внутри камеры, при этом сенсорная головка выдается из этой камеры, и при этом сенсор не сварен непосредственно с направляющей трубой.
Один конец направляющей трубы, например, в определенном месте вводится в камеру и уплотняется, например, посредством устойчивого к высокому давлению винтового соединения, например, винтового соединения с врезным или зажимным кольцом. При этом на расположенную в корпусе заднюю сторону сенсорной головки действует давление, которое эквивалентно давлению, действующему внутри направляющей трубы, в частности давлению окружающего воздуха.
В другом примере осуществления несущая труба подпружинена. Тем самым обеспечивается возможность простого монтажа устройства, так как не требуется механическое соединение сенсора с держателем сенсора. Сенсор прижимается к держателю сенсора посредством подпружиненной несущей трубы. Например, для этого обращенный от сенсора конец несущей трубы подвергается воздействию силы пружины, причем эта сила пружины создается посредством пружины, например, торсионной пружины. Пружина может напрягаться посредством гайки для напряжения пружины.
В одном из вариантов осуществления направляющая труба продета сквозь корпус и соединена с корпусом посредством фланца с геометрическим и/или с силовым замыканием. При этом направляющая труба не соединена непосредственно с корпусом, а прикреплена к фланцу, который соединен с корпусом, например, соединен винтовым соединением. Например, направляющая труба привернута к фланцу. Альтернативно направляющая труба может быть также сварена с фланцем. Посредством крепления направляющей трубы к фланцу сенсор может монтироваться/демонтироваться при закрытом корпусе.
В частности, фланец уплотнен относительно корпуса. Например, для этого уплотнительный материал наносится на одну сторону поверхности фланца и/или корпус. В качестве уплотнительного материала подходит графит, который позволяет получить высокую термостойкость, высокую устойчивость к средам и высокую надежность монтажа.
Изобретение предусматривает также применение предлагаемого изобретением устройства для определения положения вращающегося в области высокого давления вала на магнитной опоре. Например, этот вал является составной частью охлаждаемого газом электродвигателя или генератора. Вал может быть также составной частью машины, в корпусе которой имеются агрессивный газ, жидкости или потоки частиц.
Вышеописанные свойства, признаки и преимущества этого изобретения, а также каким образом они достигаются, становится яснее и отчетливее понятно в контексте последующего описания примеров осуществления, которые поясняются подробнее со ссылкой на чертежи. При этом показано:
фиг.1: схематично изображение в сечении одного из примеров осуществления устройства для определения положения объекта, движущегося в области высокого давления;
фиг.2: схематично изображение в сечении одного из альтернативных примеров осуществления этого устройства и
фиг.3: схематично изображение в сечении увеличенного фрагмента другого альтернативного примера осуществления этого устройства.
Соответствующие друг другу части снабжены на фигурах одинаковыми ссылочными обозначениями.
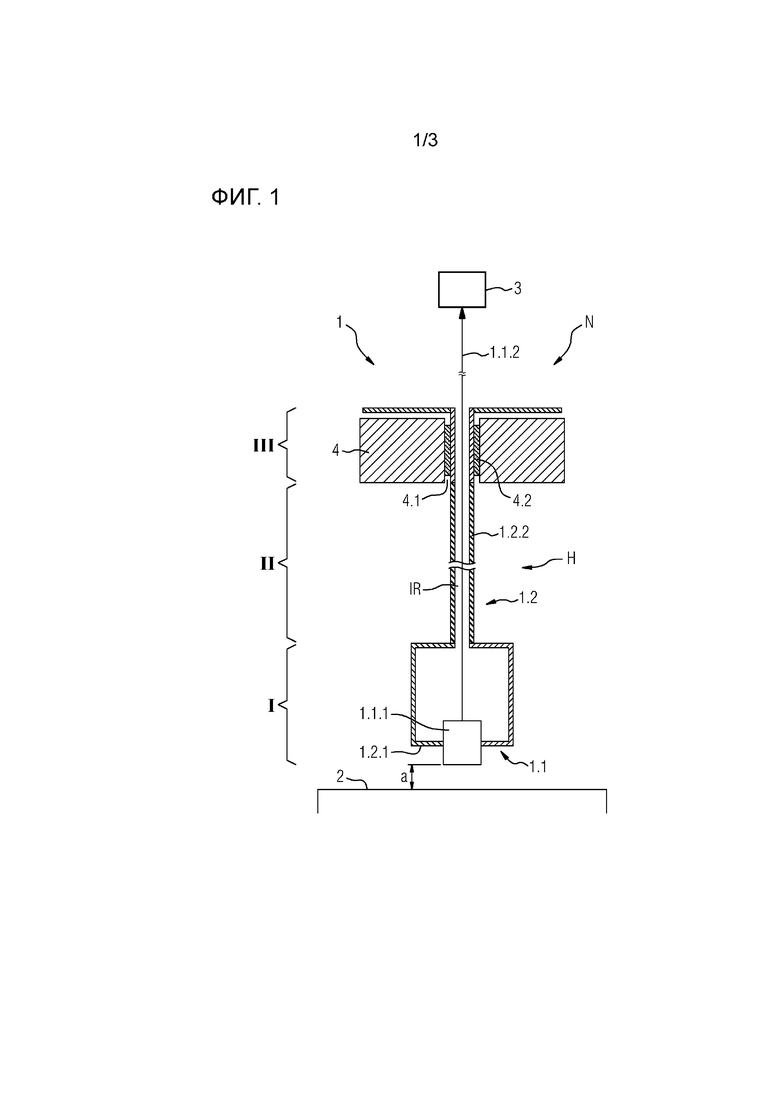
На фиг.1 показано изображение в сечении устройства 1 для определения положения объекта 2, движущегося в области H высокого давления.
Устройство 1 служит, в частности, для определения абсолютного положения объекта 2 в газовой атмосфере высокого давления. Объект 2 представляет собой, например, вращающийся вал на магнитной опоре, который является составной частью охлаждаемого газом электродвигателя или генератора. Возможно также, чтобы объект 2 являлся составной частью машины, которая в области H высокого давления подвержена воздействию агрессивных газов, жидкостей или потоков частиц. Определение положения объекта 2 в области H высокого давления служит для оптимальной эксплуатации электродвигателя/генератора или машины, а также других связанных с ними конструктивных элементов и/или функций.
Показанное на фиг.1 устройство 1 включает в себя блок 1.1 регистрации и несущий узел 1.2. Блок 1.1 регистрации включает в себя сенсор 1.1.1, который служит для регистрации сигнала положения объекта 2 в области H высокого давления. Сенсор 1.1.1 может быть выполнен в виде индуктивного сенсора, емкостного сенсора, оптического сенсора, ультразвукового сенсора, магнитного сенсора и т.п. В частности, сенсор 1.1.1 представляет собой сенсор вихревого тока. При этом посредством сенсора 1.1.1 возможна бесконтактная динамическая регистрация абсолютного положения объекта 2 в области H высокого давления.
Блок 1.1 регистрации включает в себя также сенсорный провод 1.1.2 для передачи сигнала положения в блок 3 аналитической обработки. Этот блок 3 аналитической обработки представляет собой, например, устройство управления и по настоящему примеру осуществления расположен в области N низкого давления и вместе с тем вне области H высокого давления.
Сенсорный провод 1.1.2 включает в себя, например, не изображенную более подробно образом систему из нескольких или многих тонких проволок, которые соединены, в частности свиты друг с другом в так называемую жилу. Если сенсорный провод 1.1.2 представляет собой коаксиальный кабель, он включает в себя по меньшей мере один другой провод, который концентрически расположен вокруг изолированной жилы. Этот другой провод тоже выполнен в виде многопроволочной жилы. Это обеспечивает возможность механической прочности сенсорного провода 1.1.2.
Между проводами жилы, а также между изолятором и жилой обычно образуются полости, которые наполнены воздухом. Когда сенсорный провод 1.1.2 эксплуатируется в газовой атмосфере, в частности в области H высокого давления, газ вследствие диффузионных процессов может проникать в эти полости, пока давление газа в полости не будет равно давлению газа внешней газовой атмосферы, то есть в области H высокого давления.
При понижении давления в области H высокого давления давление газа в полостях понижается только очень медленно, пока этот процесс по-прежнему основывается на диффузии. Это разностное давление может вредить изоляции сенсорного провода 1.1.2. Для уменьшения риска такого повреждения сенсорный провод 1.1.2 в несущем узле 1.2 выводится из корпуса 4.
Несущий узел 1.2 выполнен в виде погружной трубы и включает в себя три участка I, II, III.
В первом участке I несущего узла 1.2 расположен сенсор 1.1.1, который, наряду с регистрацией положения, предусмотрен для образования барьера давления между областью H высокого давления и внутренним пространством IR несущего узла 1.2. Это внутреннее пространство IR несущего узла 1.2 образует при этом область низкого давления по сравнению с областью H высокого давления.
Сенсор 1.1.1 расположен, в частности закреплен на свободном конце 1.2.1 несущего узла 1.2 и выдается из него в направлении объекта 2. В частности, сенсор 1.1.1 расположен на расстоянии a от объекта 2, так что сигнал положения регистрируется бесконтактным образом.
Свободный конец 1.2.1, в котором помещается сенсор 1.1.1, несущего узла 1.2 также стационарен в области H высокого давления. В частности, сенсор 1.1.1 неподвижно помещен в изображенном и описанном подробнее на фиг.2 держателе 1.1.1.2 сенсора, в частности напрессован или привернут. Таким образом, зафиксировано абсолютное положение сенсора 1.1.1 в области H высокого давления. Сенсорный провод 1.1.2 проходит в области низкого давления несущего узла 1.2. Тем самым могут предотвращаться или по меньшей мере значительно уменьшаться процессы диффузии газа, которые описаны ранее.
Во втором участке II несущий узел 1.2 выполнен механически гибким по сравнению с первым участком I и третьим участком III. Другими словами: несущий узел 1.2 включает в себя гибкий участок 1.2.2, который расположен между сенсором 1.1.1 и ограничивающим область H высокого давления корпусом 4, например, корпусом электродвигателя. Кроме того, в этом гибком участке 1.2.2. расположен сенсорный провод 1.1.2, который выводится из области H высокого давления через третий участок III.
Для гибкого исполнения несущего узла 1.2 во втором участке II он включает в себя механически гибкий материал, который компенсирует тепловые изменения длины устройства 1. Для этого несущий узел 1.2 выполнен, например, в виде металлической гофрированной трубы. При этом гибкий участок 1.2.2 ведет себя соответственно пружине растяжения или пружине сжатия без изменения абсолютного положения сенсора 1.1.1 в области H высокого давления. В частности, положение сенсора 1.1.1, а также положение несущего узла 1.2 в третьем участке III при изменении длины гибкого участка 1.2.2 не изменяется или изменяется только пренебрежимо мало. Несущий узел 1.2 имеет в первом и третьем участке I, III как можно более жесткий материал, например, металл или пластик.
В третьем участке III несущий узел 1.2 выведен из корпуса 4. Для этого корпус 4 включает в себя вырез 4.1, имеющий область 4.2 уплотнения, которая уплотняет несущий узел 1.2 в корпусе 4. Для уплотнения применяется, например, графит, который дает высокую термостойкость, высокую устойчивость к средам и высокую надежность монтажа. Помимо этого, это обеспечивает возможность простого монтажа/демонтажа сенсора 1.1.1 через вырез 4.1. Дополнительные отверстия для монтажа/демонтажа сенсора 1.1.1 не требуются.
Несущий узел 1.2 в третьем участке III стационарен, в частности стационарен по отношению к корпусу 4. Поэтому положение несущего узла 1.2 в третьем участке III при изменении длины несущего узла 1.2 в гибком участке 1.2.2 не изменяется или изменяется только пренебрежимо мало.
Таким образом, гибкий участок 1.2.2 обеспечивает возможность компенсации изменений длины несущего узла 1.2, которые, в частности, являются результатом термодинамических влияний в области H высокого давления. Поэтому положение сенсора 1.1.1 в области H высокого давления не изменяется или изменяется только пренебрежимо мало. Это обеспечивает возможность прецизионных измерений абсолютного положения объекта 2 в области H высокого давления. К тому же сенсорный провод 1.1.2 проходит внутри несущего узла 1.2 в области низкого давления, так что изменения давления в области H высокого давления не оказывают или оказывают по меньшей мере только пренебрежимо малое влияние на давление внутри сенсорного провода 1.1.2. Тем самым минимизируется риск повреждения сенсорного провода 1.1.2.
Помимо этого, посредством гибкого участка 1.2.2 могут уменьшаться передачи вибраций из области корпуса 4 на сенсор 1.1.1.
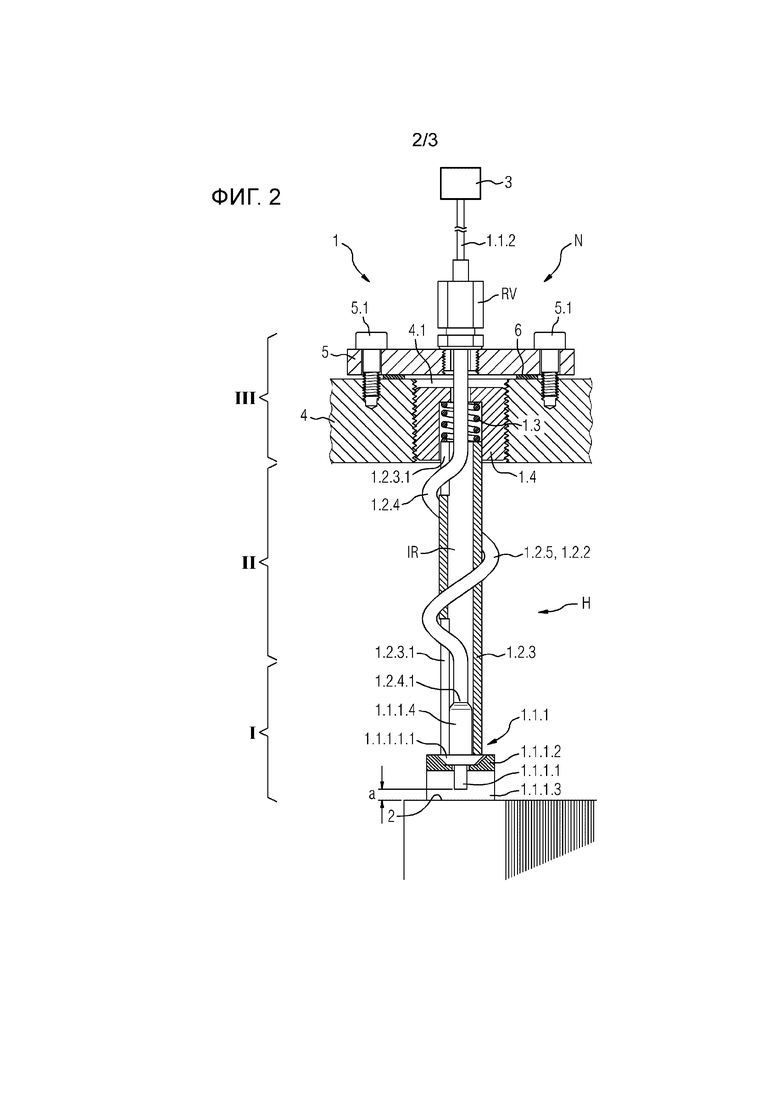
На фиг.2 показан один из альтернативных примеров осуществления устройства 1 на изображении в сечении.
Устройство 1 включает в себя, аналогично примеру осуществления, показанному на фиг.1, блок 1.1 регистрации и несущий узел 1.2, который введен в область H высокого давления через вырез 4.1 корпуса 4. Однако здесь несущий узел 1.2 выполнен из двух частей и включает в себя по существу жесткую несущую трубу 1.2.3 и направляющую трубу 1.2.4. Несущая труба 1.2.3 выполнена в виде трубчатой стойки. Несущая труба 1.2.3 и направляющая труба 1.2.4 выполнены каждая полыми и состоят, например, из металла. В направляющей трубе 1.2.4 помещается сенсорный провод 1.1.2, и в соответствии с несущим узлом 1.2, описанным на фиг.1, она разделена на три участка 1-III.
В первом участке I, аналогично примеру осуществления на фиг.1, расположен сенсор 1.1.1. В частности, сенсор 1.1.1 прикреплен к концу 1.2.4.1 направляющей трубы 1.2.4. Сенсор 1.1.1 изображен здесь более подробно и включает в себя сенсорную головку 1.1.1.1 и держатель 1.1.1.2 сенсора, в котором помещается сенсорная головка 1.1.1.1. В одном из не показанных, альтернативных примеров осуществления сенсор 1.1.1 может также находиться внутри камеры, при этом сенсорная головка 1.1.1.1 выдается из этой камеры. Конец 1.2.4.1 направляющей трубы 1.2.4 здесь, например, вводится в камеру в определенном месте и уплотняется, например, посредством устойчивого к высокому давлению винтового соединения, например, винтового соединения с врезным или зажимным кольцом. При этом на заднюю сторону сенсорной головки действует давление, которое эквивалентно давлению, действующему внутри направляющей трубы 1.2.4, в частности давлению окружающего воздуха.
Сенсорная головка 1.1.1.1 включает в себя, например, один или несколько сенсоров вихревого тока для регистрации сигнала положения объекта 2. Для этого сенсорная головка 1.1.1.1 размещена на расстоянии a от поверхности объекта 2 и стационарно расположена в области H высокого давления. Так как сигнал положения зависим от расстояния a, абсолютное положение объекта 2 может определятся бесконтактным образом посредством сенсора 1.1.1. Сенсорная головка 1.1.1.1 выдается из корпуса 1.1.1.4 сенсора в направлении объекта 2, при этом в показанном примере осуществления сенсорная головка 1.1.1.1, начиная от кромки держателя 1.1.1.2 сенсора, который при этом изображен в виде рассеченного кольца, выдается в область 1.1.1.3 держателя 1.1.1.2 сенсора в направлении объекта 2.
Корпус 1.1.1.4 сенсора по показанному примеру осуществления выполнен цилиндрическим и в лежащей в направлении сенсорной головки 1.1.1.1 области имеет бортик 1.1.1.1.1, диаметр которого увеличен по сравнению с диаметром корпуса 1.1.1.4 сенсора и сенсорной головки 1.1.1.1. Альтернативно возможны также размеры бортика 1.1.1.1.1 без увеличенного по сравнению с корпусом 1.1.1.4 сенсора диаметра. Корпус 1.1.1.4 сенсора включает в себя не показанным подробно образом контактный элемент для электрического контактирования сенсорной головки 1.1.1.1 с сенсорным проводом 1.1.2 и вместе с тем для передачи сигнала положения в блок 3 аналитической обработки.
Держатель 1.1.1.2 сенсора представляет собой механический держатель для корпуса 1.1.1.4 сенсора и стабильно и стационарно задает положение сенсорной головки 1.1.1.1 в области H высокого давления. Держатель 1.1.1.2 сенсора имеет соответствующую бортику 1.1.1.1.1 выемку, при этом бортик 1.1.1.1.1 незакрепленным образом лежит на держателе 1.1.1.2 сенсора, и при этом сенсорная головка 1.1.1.1 вдается сквозь держатель 1.1.1.2 в направлении объекта 2, и при этом сенсорная головка 1.1.1.1 прижимается к держателю 1.1.1.2 сенсора посредством несущей трубы 1.2.3. Это будет подробнее описываться позднее.
Альтернативно сенсор 1.1.1 может быть привернут к держателю 1.1.1.2 сенсора. Для этого сенсор 1.1.1 имеет наружную резьбу, а держатель 1.1.1.2 сенсора внутреннюю резьбу, которые входят с зацепление друг с другом с геометрическим и с силовым замыканием. При этом для монтажа сенсора 1.1.1 сенсор 1.1.1. посредством торцового ключа привертывается к держателю 1.1.1.2 сенсора. При этом варианте осуществления система из несущей трубы 1.2.3, пружинного элемента 1.3 и зажимного элемента 1.4 не требуется.
Кроме того, сенсор 1.1.1 задней стороной закреплен на направляющей трубе 1.2.4. В частности, корпус 1.1.1.4 сенсора задней стороной сварен с направляющей трубой 1.2.4. Альтернативно сенсорная головка 1.1.1.1 может быть также склеена или соединена винтовым соединением (см. фиг.3) с направляющей трубой 1.2.4. Кроме того, направляющая труба 1.2.4 может быть также закреплена в/на держателе 1.1.1.2 сенсора, например, посредством уплотняющего винтового соединения.
Конец 1.2.1 несущего узла 1.2, в котором помещается сенсор 1.1.1, в данном случае направляющая труба 1.2.4, расположен внутри несущей трубы 1.2 и вводится в несущую трубу 1.2.3 снаружи через выполненное в несущей трубе 1.2.3 отверстие 1.2.3.1.
Вне несущей трубы 1.2.3 по показанному примеру осуществления проходит выполненный в виде трубчатой спирали отрезок 1.2.5 направляющей трубы 1.2.4. Этот отрезок 1.2.5 образует гибкий участок 1.2.2 несущего узла 1.2.
Этот выполненный в виде трубчатой спирали отрезок 1.2.5 позволяет получить упругую структуру и находится во втором участке II несущего узла 1.2. Жесткая несущая труба 1.2.3 служит для гарантии стационарного положения сенсора 1.1.1 в области H высокого давления, а также для механической стабилизации направляющей трубы 1.2.4.
Отрезок 1.2.5 спиралеобразно расположен вокруг несущей трубы 1.2.3 и прикреплен к ней. Например, отрезок 1.2.5 прикреплен к несущей трубе 1.2.3 посредством (не показанных подробнее) скоб или ребер, благодаря чему могут компенсироваться передаваемые на несущую трубу 1.2.3 вибрации.
Альтернативно отрезок 1.2.5 может быть также полностью расположен во внутреннем пространстве IR несущей трубы 1.2.3, причем в этом случае диаметр несущей трубы 1.2.3 в области отрезка 1.2.5 при известных условиях больше, чем в других областях несущей трубы 1.2.3. Если направляющая труба 1.2.4 полностью расположена во внутреннем пространстве IR несущей трубы 1.2.3, можно обойтись без отверстий или вырезов для продевания направляющей трубы 1.2.4.
В третьем участке III направляющая труба 1.2.4 снова расположена внутри несущей трубы 1.2.3 и, аналогично первому участку I, продета через выполненное в несущей трубе 1.2.3 отверстие 1.2.3.1. Направляющая труба 1.2.4 направляется в область N низкого давления сквозь вырез 4.1 корпуса 4.
Кроме того, в третьем участке III расположен пружинный элемент 1.3, который воздействует на расположенный в вырезе 4.1 конец несущей трубы 1.2.3 с силой пружины. Другими словами: несущая труба 1.2.3 подпружинена. Тем самым обеспечивается возможность простого монтажа/демонтажа сенсора 1.1.1, так как посредством силы пружины создается механическое соединение сенсорной головки 1.1.1.1 с держателем 1.1.1.2 сенсора. В частности, сенсорная головка 1.1.1.1 прижимается к держателю 1.1.1.2 сенсора посредством подпружиненной несущей трубы 1.2.3. При этом сенсорная головка 1.1.1.1 и держатель 1.1.1.2 сенсора соединены друг с другом незакрепленным образом.
Пружинный элемент 1.3 представляет собой, например, торсионную пружину, которая может напрягаться посредством напрягающего элемента 1.4, например, гайки для напряжения пружины. В показанном примере осуществления напрягающий элемент 1.4 расположен внутри выреза 4.1, причем этот вырез 4.1 увеличен по сравнению с примером осуществления, показанным на фиг.1. Напрягающий элемент 1.4 имеет, например, не изображенную наружную резьбу, которая входит в зацепление с геометрическим и с силовым замыканием в выполненную в вырезе 4.1 внутреннюю резьбу. При винтовом соединении напрягающего элемента 1.4 с вырезом 4.1 напрягающий элемент 1.4 движется аксиально в направлении несущей трубы 1.2.3, вследствие чего пружинный элемент 1.3 напрягается.
Направляющая труба 1.2.4 в третьем участке III продета сквозь корпус 4 и посредством фланца 5 с геометрическим и/или с силовым замыканием и/или посредством материала соединена с корпусом 4. В частности, направляющая труба 1.2.4 посредством уплотняющего трубного винтового соединения RV прикреплена к фланцу 5. Это трубное винтовое соединение RV может быть винтовым соединением с врезным или зажимным кольцом и/или включать в себя уплотнение, например, графитовую втулку.
Фланец 5 по показанному примеру осуществления привернут к корпусу 4 посредством крепежных элементов 5.1, в частности винтов, и имеет центральную выемку для продевания направляющей трубы 1.2.4. В области этой выемки направляющая труба 1.2.4 прикреплена к фланцу 5 посредством показанного трубного винтового соединения RV. Альтернативно направляющая труба 1.2.4 может быть также сварена с фланцем 5. Крепление направляющей трубы 1.2.4 к фланцу 5 обеспечивает возможность монтажа/демонтажа сенсора 1.1.1 при закрытом корпусе 4.
Фланец 5 уплотнен относительно корпуса 4. Для этого между фланцем 5 и корпусом 4 расположен или введен уплотнительный элемент 6. Этот уплотнительный элемент 6, аналогично области 4.2 уплотнения, состоит, например, из графита. Уплотнительный элемент 6 может быть установлен, в частности наклеен, наламинирован или нанесен распылением на обращенной к корпусу 4 стороне поверхности фланца 5 и/или на обращенной к фланцу 5 стороне поверхности корпуса 4. При креплении фланца 5 к корпусу 4 уплотнительный элемент 6 сжимается, так что область между корпусом 4 и фланцем 5 уплотняется. Альтернативно уплотнительный элемент 6 может также вводиться после крепления фланца 5 к корпусу 4 в область между ними.
Описанное здесь устройство 1, аналогично устройству 1 с фиг.1, обеспечивает возможность компенсации изменений длины несущего узла 1.2, которые, в частности, являются результатом термодинамических влияний в области H высокого давления. В частности, при этом выполненный в виде трубчатой спирали отрезок 1.2.5 образует гибкий участок 1.2.2, который вследствие спиральной формы может удлиняться или укорачиваться по принципу пружины растяжения или пружины сжатия. Благодаря этому положение сенсора 1.1.1. в области H высокого давления не изменяется или изменяется только пренебрежимо мало. Положение направляющей трубы 1.2.4 в третьем участке III тоже не изменяется или изменяется только пренебрежимо мало.
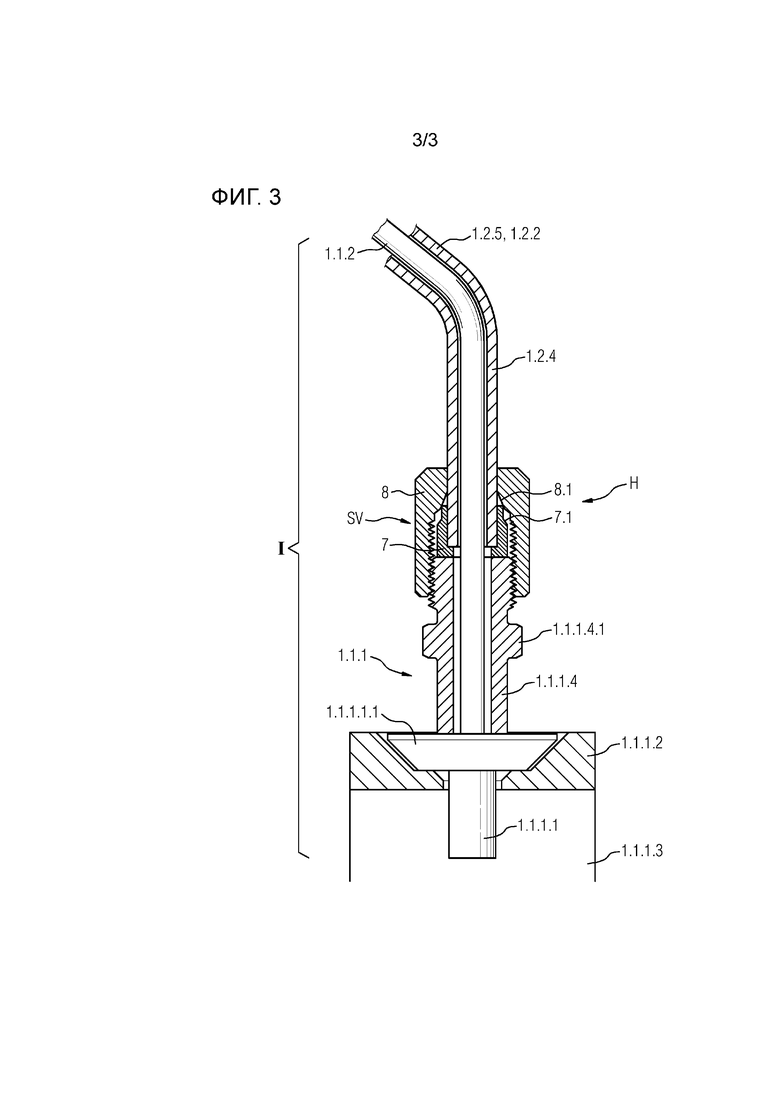
На фиг.3 показано изображение в сечении увеличенного фрагмента устройства 1 в другом, альтернативном примере осуществления.
На показанном фрагменте подробнее показан первый участок I несущего узла 1.2, который, аналогично описанному на фиг.2 несущему узлу 1.2, имеет направляющую трубу 1.2.4, имеющую выполненный в виде трубчатой спирали отрезок 1.2.5 для образования гибкого участка 1.2.2. Несущая труба 1.2.3 здесь не изображена.
В отличие от описанного на фиг.2 несущего узла 1.2, корпус 1.1.1.4 сенсора не сварен с направляющей трубой 1.2.4, а соединен с направляющей трубой 1.2.4посредством винтового соединения SV с врезным кольцом. При этом показанный корпус 1.1.1.4 сенсора выполнен цельно. Альтернативно корпус 1.1.1.4 сенсора может также состоять из нескольких сваренных друг с другом частей.
Корпус 1.1.1.4 сенсора имеет поверхность 1.1.1.4.1 для воздействия инструмента, в данном случае наружный шестигранник. Кроме того, с задней стороны на корпусе 1.1.1.4 сенсора расположено врезное кольцо 7, которое охватывает один конец направляющей трубы 1.2.4 и с торцевой стороны прилегает к заднему концу корпуса 1.1.1.4 сенсора. Врезное кольцо 7 состоит, в частности, из металла или металлического сплава.
Кроме того, врезное кольцо 7 и задний конец корпуса 1.1.1.4 сенсора охватываются накидной гайкой 8 в качестве элемента управления. Эта накидная гайка 8 имеет внутреннюю резьбу, которой она может навертываться на корпус 1.1.1.4 сенсора и/или направляющую трубу 1.2.4. Для этого корпус 1.1.1.4 сенсора и/или направляющая труба 1.2.4 имеют соответствующую наружную резьбу.
При монтаже устройства 1 накидная гайка 8 посредством инструмента вращается, в частности навертывается на корпус 1.1.1.4 сенсора и/или направляющую трубу 1.2.4. При этом врезное кольцо 7 напрягается в осевом направлении, вследствие чего оно деформируется радиально внутрь, и расположенные на врезном кольце 7 режущие кромки, врезаясь, в частности с геометрическим замыканием, проникают в материал направляющей трубы 1.2.4. Как показано в этом примере осуществления, врезное кольцо 7 имеет конически сужающуюся с концевой стороны наружную коническую поверхность 7.1, которая прилегает к ответной внутренней конической поверхности 8.1 накидной гайки 8. За счет этого, дополнительно к радиальному сжатию врезного кольца 7, достигается расклинивающее действие.
Посредством описанного винтового соединения SV с врезным кольцом, с одной стороны, механически стабилизируется направляющая труба 1.2.4. С другой стороны, достигается функция металлического уплотнения с помощью врезного кольца 7. К тому же может применяться универсальный или конструктивно одинаковый сенсор 1.1.1, при этом направляющая труба 1.2.4 изготавливается в зависимости от применения.
Хотя изобретение было подробнее проиллюстрировано и описано в деталях на предпочтительных примерах осуществления, изобретение не ограничено раскрытыми примерами, и специалистом могут выводиться отсюда другие варианты без выхода из объема охраны изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-поворотное устройство для быстрого монтажа и демонтажа антенны на мачте | 2020 |
|
RU2745208C1 |
| Счетчик импульсов | 1984 |
|
SU1187265A1 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНО ЗАПОЛНЕННОГО ШПРИЦА И ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2569702C2 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНО ЗАПОЛНЕННОГО ШПРИЦА И ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2572738C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2004 |
|
RU2341394C2 |
| ЗАМЕЩЕННЫЕ АЗЕПИНО[4,3-b]ИНДОЛЫ, ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ, СПОСОБ ИХ ПОЛУЧЕНИЯ И ПРИМЕНЕНИЯ | 2006 |
|
RU2317989C1 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2578360C2 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНОГО ЗАПОЛНЕННОГО ШПРИЦА И ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2573793C2 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНО ЗАПОЛНЕННОГО ШПРИЦА И ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2573039C2 |
| СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ ПОДВИЖНОЙ ЕДИНИЦЫ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2017 |
|
RU2681472C1 |
Группа изобретений касается устройства (1) для определения положения объекта (2), движущегося в области (H) высокого давления и применения устройства (1) для определения положения вала на магнитной опоре, вращающегося в области (H) высокого давления. Устройство (1) содержит блок (1.1) регистрации, имеющий один сенсор (1.1.1) для регистрации положения объекта (2) и подачи сигнала положения, и сенсорный провод (1.1.2) для передачи сигнала положения в блок (3) аналитической обработки, несущий узел (1.2), при этом несущий узел (1.2) имеет гибкий участок (1.2.2), который расположен между стационарным концом (1.2.1) и участком (III), проведенным через ограничивающий область (H) высокого давления корпус, причем гибкий участок (1.2.2) образован выполненным в виде трубчатой спирали отрезком (1.2.5) направляющей трубы (1.2.4), через который проведен сенсорный провод (1.1.2). Технический результат - повышение точности определения положения объекта в области H высокого давления для оптимальной эксплуатации электродвигателя/генератора или машины, повышение прочности устройства. 2 н. и 9 з.п. ф-лы, 3 ил.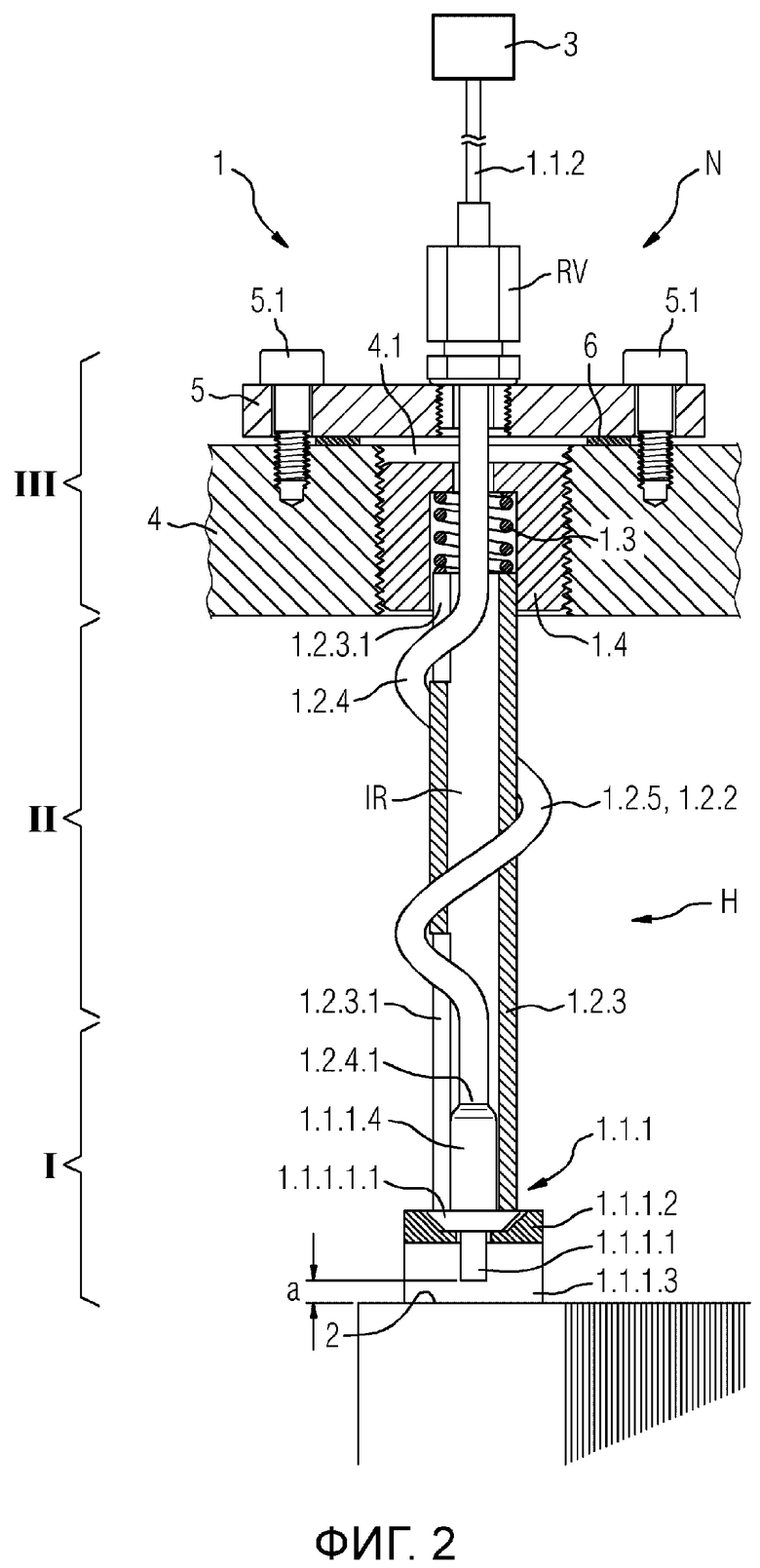
1. Устройство (1) для определения положения объекта (2), движущегося в области (H) высокого давления, включающее в себя
- блок (1.1) регистрации, имеющий по меньшей мере один сенсор (1.1.1) для регистрации положения объекта (2) и подачи сигнала положения, и сенсорный провод (1.1.2) для передачи сигнала положения в блок (3) аналитической обработки, и
- несущий узел (1.2) для помещения блока (1.1) регистрации,
- при этом сенсор (1.1.1) расположен на обращенном к объекту (2) и стационарно расположенном в области (H) высокого давления конце (1.2.1) несущего узла (1.2),
- несущий узел (1.2) имеет гибкий участок (1.2.2), который расположен между стационарным концом (1.2.1) и участком (III), проведенным через ограничивающий область (H) высокого давления корпус (4),
- сенсорный провод (1.1.2) блока (1.1) регистрации через гибкий участок (1.2.2) и через проходящий через корпус (4) участок (III) выведен из области (H) высокого давления и
- гибкий участок (1.2.2) образован выполненным в виде трубчатой спирали отрезком (1.2.5) направляющей трубы (1.2.4), через который проведен сенсорный провод (1.1.2).
2. Устройство (1) по п.1, при этом гибкий участок (1.2.2) по своей длине образует пружину растяжения или пружину сжатия.
3. Устройство (1) по п.1 или 2, при этом абсолютное положение стационарного конца, а также абсолютное положение проведенного через корпус (4) участка (III) несущего узла (1.2) при изменении длины гибкого участка (1.2.2) сохраняются.
4. Устройство (1) по одному из предыдущих пп.1-3, при этом выполненный в виде трубчатой спирали отрезок (1.2.5) расположен вокруг и/или внутри несущей трубы (1.2.3), в частности вокруг жесткой и/или внутри жесткой несущей трубы (1.2.3).
5. Устройство (1) по п.4, при этом выполненный в виде трубчатой спирали отрезок (1.2.5) гибко закреплен на и/или в несущей трубе (1.2.3).
6. Устройство (1) по одному из предыдущих пп.1-5, при этом к концу (1.2.4.1) направляющей трубы (1.2.4) прикреплен сенсор (1.1.1), и этот конец (1.2.4.1) расположен внутри несущей трубы (1.2.3).
7. Устройство (1) по одному из предыдущих пп.1-6, при этом сенсор (1.1.1) сварен, склеен или, в частности посредством винтового соединения (SV) с врезным кольцом, соединен винтовым соединением с направляющей трубой (1.2.4).
8. Устройство (1) по одному из пп.4-7, при этом несущая труба (1.2.3) подпружинена.
9. Устройство (1) по одному из предыдущих пп.1-8, при этом направляющая труба (1.2.4) продета сквозь корпус (4) и соединена с корпусом (4) посредством фланца (5) с геометрическим и с силовым замыканием.
10. Устройство (1) по п.9, при этом фланец (5) уплотнен относительно корпуса (4).
11. Применение устройства (1) по одному из предыдущих пп.1-10 для определения положения установленного на магнитной опоре вала, вращающегося в области (H) высокого давления.
| US 4066949 A1, 03.01.1978 | |||
| US 3859847 A1, 14.01.1975 | |||
| СПОСОБ РАЗЪЕМНОГО СОЕДИНЕНИЯ ДАТЧИКА ДЛЯ АНАЛИЗА ТЕКУЧЕЙ СРЕДЫ С КОРПУСОМ, СОДЕРЖАЩИМ УПОМЯНУТУЮ ТЕКУЧУЮ СРЕДУ, И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2404411C1 |
| Форсунка | 1928 |
|
SU14181A1 |
| US 20110149300 A1, 23.06.2011. | |||

