Изобретение относится к области электротехники и может быть использовано в силовых электроприводах, к которым предъявляются требования повышенных массо-габаритных показателей.
Известны синхронные электродвигатели, содержащие статор с распределенной многофазной обмоткой, выполненной с шагом равным полюсному делению ротора, полюса которого изготовлены из постоянных магнитов (см. книгу Ф.М. Юферова «Электрические машины автоматических устройств», Москва, «Высшая школа», 1988 г., стр. 105).
Основным недостатком таких синхронных двигателей малой и средней мощности являются сравнительно низкие массо-габаритные показатели, что обусловлено малой величиной ампер-витков в пазах статора, поскольку площадь его пазов уменьшается пропорционально второй степени диаметра электродвигателя. Кроме того, существенным недостатком таких двигателей является наличие значительного момента фиксации ротора, для уменьшения которого зубцы статора выполняются со скосом. Однако, скос пазов полностью не устраняет фиксацию ротора, но уменьшает величину вращающего момента на валу двигателя.
Указанные недостатки устранены в многополюсном синхронном электродвигателе, содержащем статор с числом зубцов zc=m⋅k⋅n, где: m - число фаз обмотки статора, k -число катушечных групп в фазе, n - число катушек в катушечной группе, каждая из которых состоит из последовательно-встречно соединенных между собой катушек, охватывающих по одному зубцу статора, ротор с чередующимися по полярности и радиально намагниченными постоянными магнитам и, число которых zp=zc±k, причем при n четном катушечные группы каждой фазы соединены между собой встречно, а при n нечетном и m=3 согласно (см. патент РФ №2188494 от 16.04.2001 г., Бюл. №24 от 27.08.2002 г. «Вентильный электродвигатель с встроенными датчиками скорости и углового положения ротора»).
Такой многополюсный синхронный электродвигатель, за счет лучшего использования потока постоянных магнитов и повышения частоты фазного тока (см., например, статью «Магнитоэлектрический вентильный двигатель с улучшенными массогабаритными показателями и малом значении момента «залипания» ротора», автор М.И. Лузин, журнал «Электричество», 2010 г., №6, стр. 45), имеет высокие массо-габаритные показатели и более высокий к.п.д. из-за меньших потерь в меди обмотки статора, а также практически не имеет момента фиксации ротора (т.е. момента «залипания»).
Недостатком такого многополюсного синхронного электродвигателя малого габарита является невозможность выполнения обмотки статора проводом большого диаметра, т.к при малой ширине зубцов статора радиус изгиба обмоточного провода становится меньшим допустимого значения, что приводит к нарушению изоляции обмоточного провода. При этом, при выполнении обмотки в закрытых пазах статора нарушение изоляции провода значительно возрастает, поскольку обмоточный провод подвергается дополнительной деформации.
Целью данного изобретения является устранение указанного недостатка, т.е. расширение области применения многополюсных синхронных двигателей путем включения в нее малогабаритных двигателей с относительно большим диаметром обмоточного провода, например, малогабаритных двигателей с закрытыми пазами статора.
Указанная цель достигается тем, что в многополюсном синхронном электродвигателе, содержащем статор с числом полузакрытых или закрытых пазов zc=m⋅k⋅n, где: m - число фаз обмотки статора; k - число катушечных групп в фазе, равное числу повторяющихся частей ротора и статора; n - число катушек в катушечной группе, каждая из которых состоит из последовательно-встречно соединенных между собой катушек, причем при n четном катушечные группы каждой фазы соединены между собой встречно, а при n нечетном и m=3 согласно, ротор с чередующимися по полярности и радиально намагниченными постоянными магнитами, число которых 2р=zc±k, при n четном катушки катушечных групп выполнены с шагом zc/k зубцовых делений статора, а при n нечетном и m равном 3 катушки катушечных групп выполнены с шагом zc/k±1 зубцовых делений статора.
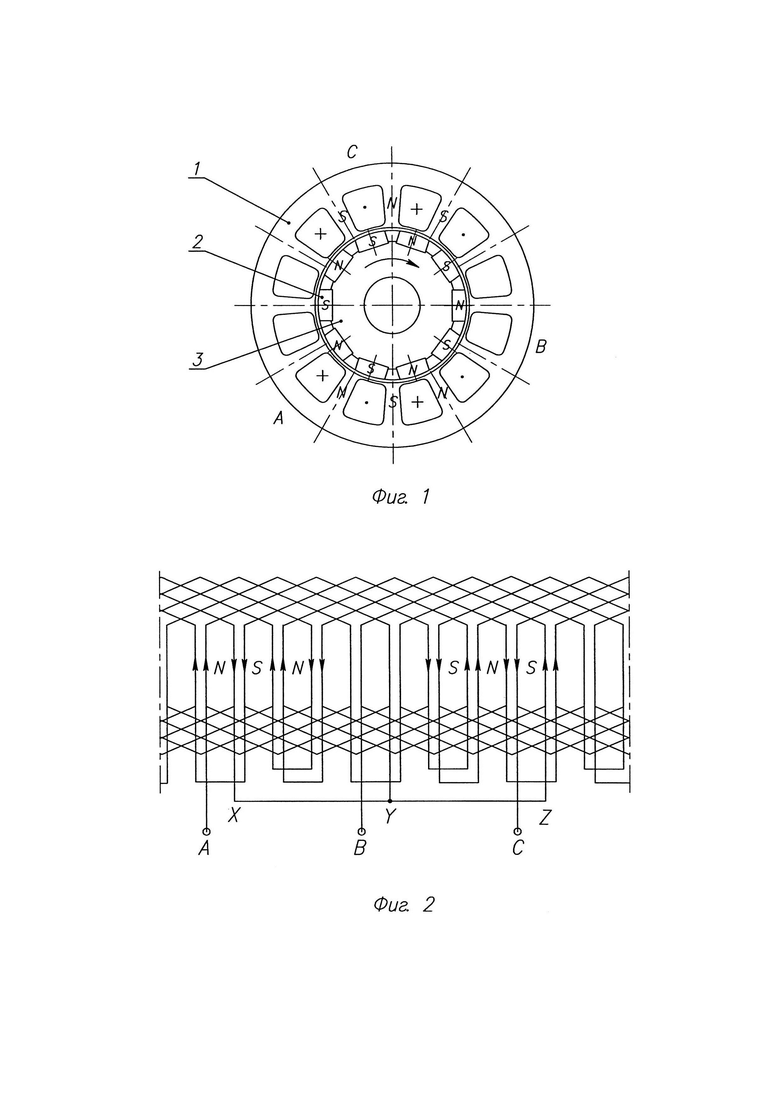
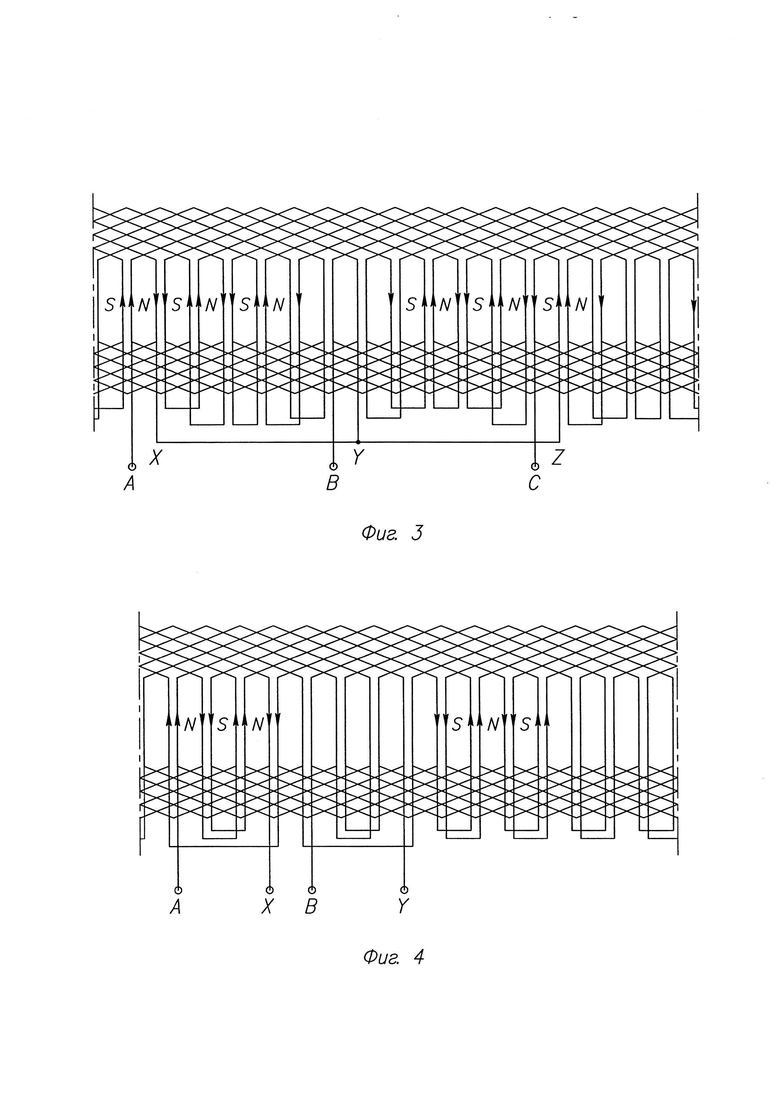
На фиг. 1 представлена конструкция многополюсного синхронного электродвигателя с m=3, zc=12 и 2р=10. На фиг. 2 изображена развернутая принципиальная схема трехфазной обмотки представленного на фиг. 1 двигателя. На фиг. 3 изображена развернутая схема трехфазной обмотки электродвигателя с zc равным 18, 2р=16. На фиг. 4 изображена развернутая схема двухфазной обмотки электродвигателя с zc=16, 2р=14.
Предложенный многополюсный синхронный электродвигатель содержит: статор 1 (см. фиг. 1) с числом закрытых пазов zc=12; ротор с числом полюсов 2р=zc±k=10 (т.к. число повторяющихся частей ротора и статора к принято равным 2), изготовленных из постоянных магнитов 2, намагниченных в радиальном направлении и закрепленных на магнитопроводном кольце 3; трехфазную обмотку, состоящую из соединенных в «звезду» фаз А-Х, B-Y, C-Z (см. фиг. 2), каждая из которых состоит из k=2 катушечных групп, число которых соответствует числу повторяющихся частей ротора и статора, а каждая катушечная группа состоит из n=zc/m⋅k=12/3⋅2=2, т.е. из четного числа катушек, поэтому катушечные группы фазы соединены между собой последовательно-встречно, а катушки выполнены с шагом равным zc/ к=12/2=6 зубцовым делениям.
На фиг. З представлена трехфазная обмотка с zc=18, k=2, 2р=16. В этом случае n=zc/m⋅k=18/3⋅2=3, т.е. нечетному числу, поэтому катушечные группы фаз соединены между собой согласно, а катушки выполнены с шагом равным zc/k±1=18/2±1=8 зубцовым делениям. Стрелками указано направление тока в фазах А и С, в фазе В ток в этот момент равен нулю.
На фиг. 4 представлена двухфазная обмотка с zc=16, k=2, 2р=14. В этом случае n=16/2-2=4, т.е. четному числу, поэтому катушечные группы фаз соединены между собой последовательно-встречно, а катушки выполнены с шагом равным zc/k=16/2=8 зубцовым делениям. Стрелками указано направление тока в катушках фазы А, в фазе В ток в этот момент равен нулю.
Работает предложенный многополюсный синхронный электродвигатель следующим образом. При подключении фаз двигателя А, В, С к источнику переменного напряжения (на чертеже не указан) в статоре 1 электродвигателя (фиг. 1) создается вращающееся магнитное поле, которое взаимодействуя с полюсами 2 ротора, приводит его во вращение. На фиг. 1 показано, что в фиксированный момент времени при равном токе в фазах А и С в зубцах статора создается магнитный поток, взаимодействующий с полюсами 2 ротора и создающий вращающий момент на валу двигателя. Направление вращения ротора указано стрелкой. На фиг. 2 стрелками указано направление тока в фазах А и С, ток в фазе В в этот момент равен нулю.
Предложенный многополюсный синхронный двигатель позволит значительно расширить область применения синхронных двигателей с повышенными массо-габаритными показателями (см. прототип), включая в нее малогабаритные двигатели с обмоточным проводом относительно большого диаметра. Это достигается тем, что катушки предложенного многополюсного двигателя выполняются с диаметральным шагом, а не охватывают каждый зубец, как в прототипе, в котором выполнение обмотки проводом большого диаметра невозможно, поскольку радиус изгиба провода из-за малой ширины зубца статора в малогабаритном двигателе становится меньше допустимого значения.
Предложенный многополюсный синхронный двигатель при шаге обмотки равным zc/k может быть выполнен как с двухслойной, так и однослойной обмоткой статора.
Испытания макета предложенного многополюсного электродвигателя показали, что выполнение катушек предложенного двигателя с диаметральным шагом и встречным направлением тока в катушках катушечных групп не уменьшили его энергетические показатели по сравнению с прототипом, а исключение малого радиуса изгиба обмоточного провода повысило его изоляционную прочность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2072611C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 2012 |
|
RU2497264C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
RU2047936C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2066912C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1995 |
|
RU2076433C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2074489C1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| М-ФАЗНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2113755C1 |
Изобретение относится к области электротехники, а точнее к многополюсным синхронным электродвигателям, применяемым в качестве силовых электродвигателей. Техническим результатом является расширение области применения многополюсных синхронных двигателей. Многополюсный синхронный электродвигатель содержит статор с числом полузакрытых или закрытых пазов zc=m⋅k⋅n, где: m - число фаз обмотки статора; k - число катушечных групп в фазе, равное числу повторяющихся частей ротора и статора; n - число катушек в катушечной группе, каждая из которых состоит из последовательно-встречно соединенных между собой катушек. При n четном катушечные группы каждой фазы соединены между собой встречно, а при n нечетном и m=3 согласно. А также многополюсный синхронный электродвигатель содержит ротор с чередующимися по полярности и радиально намагниченными постоянными магнитами, число которых 2р=zc±k. При n четном катушки катушечных групп выполнены с шагом zc/k зубцовых делений статора. При n нечетном и m равном 3 катушки катушечных групп выполнены с шагом zc/k±1 зубцовых делений статора. 4 ил.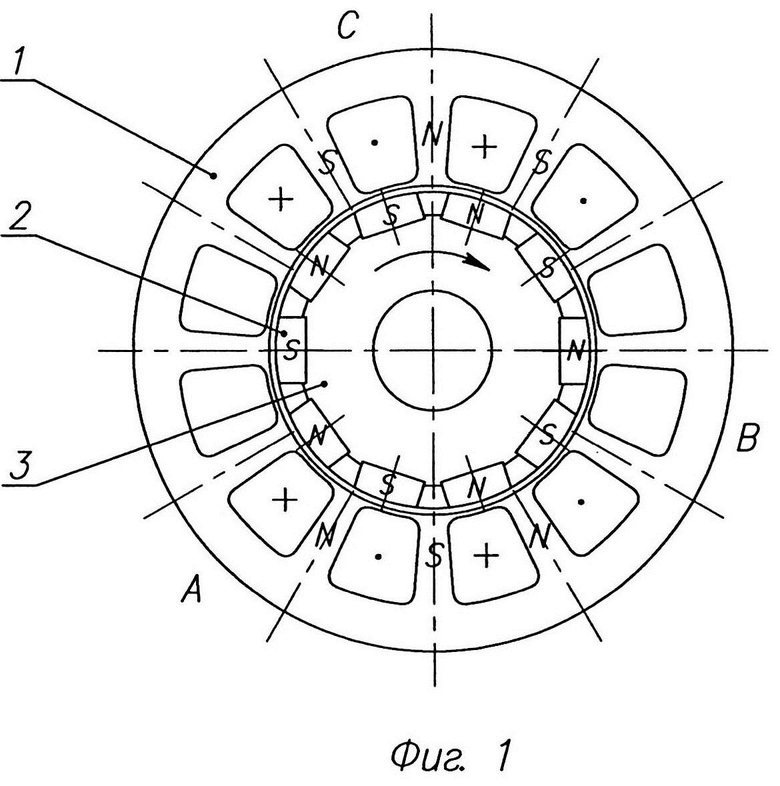
Многополюсный синхронный электродвигатель, содержащий статор с числом полузакрытых или закрытых пазов zc=m⋅k⋅n, где: m - число фаз обмотки статора; k - число катушечных групп в фазе, равное числу повторяющихся частей ротора и статора; n - число катушек в катушечной группе, каждая из которых состоит из последовательно-встречно соединенных между собой катушек, причем при n четном катушечные группы каждой фазы соединены между собой встречно, а при n нечетном и m=3 согласно, ротор с чередующимися по полярности и радиально намагниченными постоянными магнитами, число которых 2р=zc±k, отличающийся тем, что при n четном катушки катушечных групп выполнены с шагом zc/k зубцовых делений статора, а при n нечетном и m равном 3 катушки катушечных групп выполнены с шагом zc/k±1 зубцовых делений статора.
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
RU2047936C1 |
| WO 2013166919 A1, 14.11.2013. | |||

