Область техники, к которой относится изобретение
[001] Настоящее раскрытие относится, в общем, к корреляции изображений из двух или более различных медицинских систем визуализации, таких как система магнитно-резонансной томографии (МРТ) и система ультразвуковой визуализации. Магнитно-резонансная томография груди может быть использована для скрининга и диагностики, например, для определения наличия и/или количественного определения параметров, связанных с опухолью в ткани пациента. Магнитно-резонансная томография груди более распространена у пациентов с высоким риском, например, у пациентов с наличием в истории рака молочной железы и/или определенными мутациями BRCA2 (ген рака груди, от англ. BReast CAncer) в анамнезе. Магнитно-резонансная томография груди является высокочувствительной и может обеспечить более раннее обнаружение, чем традиционная рентгеновская маммография, у некоторых пациентов. Однако высокая чувствительность магнитно-резонансной томографии может привести к ложноположительному результату. Как правило, последующее ультразвуковое исследование проводят после получения положительного результата от магнитно-резонансной томограммы до начала лечения. Ультразвук может быть использован для подтверждения поражений на магнитно-резонансной томограмме, определения характеристик поражений и/или проведения биопсии поражения, обнаруженного на магнитно-резонансной томограмме.
Уровень техники
[002] Магнитно-резонансную томографию груди обычно выполняют с пациентом, лежащим на животе (т.е. лицом вниз), без опоры на грудь (груди). В отличие от этого, ультразвуковое исследование обычно проводят с пациентом, лежащим на спине (т.е. лицом вверх), при этом рука со стороны сканирования поднята над головой. Различные положения пациента, используемые для магнитно-резонансной томографии и ультразвукового исследования, могут привести к тому, что анатомические структуры будут иметь разный вид между изображениями двух систем. Форма и/или положение поражений также могут смещаться из-за различных положений груди в двух системах визуализации. Эти различия могут привести к тому, что во время ультразвукового исследования будет сложно обнаружить поражение, отмеченное на магнитно-резонансном изображении. Большие размеры груди и/или множественные поражения могут усугубить эти трудности. Таким образом, могут быть необходимы инструменты для локализации поражений, обнаруженных на магнитно-резонансной томограмме, во время последующего ультразвукового исследования. Например, способность и/или уверенность в корреляции результатов магнитно-резонансной томографии при последующей ультразвуковой визуализации может облегчить ультразвуковое исследование груди вместо более дорогостоящего магнитно-резонансного исследования груди в гантри или даже избежать последующих исследований в случае, если результаты ультразвукового исследования охарактеризованы как благоприятные.
[02A] В заявке на патент США 2006/0251301 раскрыт способ и устройства, использующие известное местоположение области груди, представляющей интерес, например, поражения, из способа оценки для прогнозирования местоположения области, представляющей интерес, для другого способа оценки. В заявке на патент США 2012/0114213 раскрыта система для мультимодальной визуализации груди.
Раскрытие сущности изобретения
[003] Раскрыты системы и способы ультразвуковой визуализации, которые могут улучшить корреляцию между ультразвуковыми изображениями груди и изображениями груди, полученными другими методами.
[004] Пример системы ультразвуковой визуализации в соответствии с принципами настоящего раскрытия может включать в себя пользовательский интерфейс, содержащий дисплей и пользовательское устройство ввода, память, функционально соединенную с пользовательским интерфейсом, и процессор, функционально соединенный с пользовательским интерфейсом и памятью. Память может включать в себя исполняемые процессором инструкции, которые при исполнении процессором могут побудить пользовательский интерфейс обеспечить визуальное указание прогнозируемого местоположения поражения, например, для направления сбора данных изображения с помощью ультразвуковой визуализации, и может далее побудить пользовательский интерфейс отобразить ультразвуковое изображение, полученное системой ультразвуковой визуализации. В некоторых вариантах осуществления память может включать в себя исполняемые процессором инструкции для приема указания предполагаемого местоположения поражения по отношению к ранее полученным данным изображения с использованием первого метода визуализации (например, набор данных магнитно-резонансного изображения), а также для генерирования прогнозируемого местоположения поражения, во время визуализации поражения с использованием другого метода (например, ультразвукового).
[005] Пример способа в соответствии с принципами данного раскрытия может включать в себя прием ранее полученных данных изображения, включающих в себя информацию о предполагаемом местоположении (местоположениях) поражения, применение модели деформации к ранее полученным данным изображения для генерирования прогнозируемого местоположения поражения и предоставление прогнозируемых местоположений поражения интерфейсу определения местоположения поражения. В некоторых вариантах осуществления способ может включать в себя прием данных визуализации, полученных с помощью визуализации ткани с использованием первого метода (например, набор объемных магнитно-резонансных данных), прием указания предполагаемого местоположения поражения в пределах визуализируемой ткани, применение модели деформации к предполагаемому местоположению поражения для генерирования прогнозируемого местоположения поражения при визуализации ткани с использованием второго метода, а также обеспечение графического представления прогнозируемого местоположения на интерфейсе определения местоположения поражения, связанном с системой визуализации, работающей с изображением с помощью второго метода.
[006] Пример долговременного машиночитаемого носителя в соответствии с принципами данного раскрытия может включать в себя исполняемые процессором инструкции по прогнозированию местоположений поражения в системе ультразвуковой визуализации, которые при исполнении могут побудить систему ультразвуковой визуализации: применить модель деформации к ранее полученному изображению, отобразить прогнозируемое местоположение поражения, получить ультразвуковое изображение в реальном времени и отобразить ультразвуковое изображение в реальном времени.
[007] Аспекты настоящего раскрытия, такие как определенные элементы пользовательского интерфейса и/или способы, описанные в настоящем документе, могут быть воплощены в машиночитаемых носителях, включающих в себя инструкции, исполняемые процессором. Например, память, содержащая исполняемые процессором инструкции по выполнению любого из описанных способов, может быть включена в систему ультразвуковой визуализации в соответствии с настоящим раскрытием. В некоторых вариантах осуществления исполняемые процессором инструкции по предоставлению одного или нескольких графических пользовательских интерфейсов или их элементов могут быть включены в программный пакет для исполнения на аналитической рабочей станции. Аспекты настоящего раскрытия могут облегчить оффлайн-просмотр и анализ ультразвуковых изображений, как описано ниже, однако следует понимать, что принципы, описанные здесь, могут быть в равной степени применимы и к онлайн-анализу изображений (например, анализ, выполненный на ультразвуковой системе во время или вскоре после получения изображения).
Краткое описание чертежей
[008] На фиг. 1 показана система 100 ультразвуковой визуализации, выполненная в соответствии с принципами настоящего раскрытия в виде блок-диаграммы.
[009] На фиг. 2 показана иллюстрация системы ультразвуковой визуализации, которая может быть использована для визуализации груди в соответствии с принципами настоящего раскрытия.
[010] На фиг. 3 показаны элементы пользовательского интерфейса, связанные с интерфейсом 300 определения местоположения поражения в соответствии с принципами настоящего раскрытия.
[011] На фиг. 4 показаны схематичные изображения тела и связанные с ними комментарии (отметки) в соответствии с принципами настоящего раскрытия.
[012] На фиг. 5 показана блок-схема примерного процесса определения местоположений поражений, отмеченных на ранее полученных изображениях, при текущем ультразвуковом исследовании в соответствии с принципами настоящего раскрытия.
[013] На фиг. 6 показана блок-схема процесса определения прогнозируемых местоположений поражений в соответствии с принципами настоящего раскрытия.
[014] На фиг. 7 показана блок-схема процесса обеспечения визуальных указаний местоположений поражения в системе ультразвуковой визуализации в соответствии с принципами настоящего раскрытия.
Осуществление изобретения
[015] Последующее описание некоторых примерных вариантов осуществления является просто примерным по своей природе и никоим образом не предназначено для ограничения раскрытия или его применения или использования. В последующем подробном описании вариантов осуществления настоящих систем и способов приводится ссылка на сопроводительные чертежи, которые составляют часть настоящего документа, и в которых показаны в виде иллюстраций конкретные варианты осуществления, в которых раскрытые системы и способы могут быть использованы на практике. Эти варианты осуществления описаны достаточно подробно, чтобы позволить специалистам в данной области техники применять на практике раскрытые в настоящем документе системы и способы, но следует понимать, что могут быть использованы и другие варианты осуществления, и что структурные и логические изменения могут быть сделаны без отхода от сущности и объема охраны настоящей системы. Более того, для обеспечения ясности подробное описание определенных признаков не будет обсуждаться, если они являются очевидными для специалистов в данной области техники, чтобы не затруднять понимание описания настоящей системы. Поэтому последующее подробное описание не должно приниматься в ограничительном смысле, а объем охраны настоящей системы определяется только прилагаемой формулой изобретения.
[016] Пациентам, особенно тем, которых считают подверженными высокому риску заболевания раком молочной железы, может быть проведена магнитно-резонансная томография (МРТ) груди. Хотя МРТ является высокочувствительной и может обеспечить раннее обнаружение рака молочной железы, МРТ может быть склонна к ложноположительным результатам. Соответственно, после выявления поражения с помощью МРТ, пациенты часто проходят последующее ультразвуковое исследование. Ультразвуковое исследование может включать в себя визуализацию поражения, получение характеристик поражения (например, размер, ригидность ткани, приток крови), и/или проведение биопсии поражения под контролем врача (например, пункционной биопсии).
[017] Врач, выполняющий последующее ультразвуковое исследование, часто не является тем же врачом, который выполнял МРТ или анализировал изображения. Врач может получить магнитно-резонансные изображения пациента и/или отчет рентгенолога, который анализировал магнитно-резонансные изображения. Основываясь на визуальном осмотре изображений и/или интерпретации отчета, врач должен попытаться найти то же поражение или поражения в груди пациента, которые были обнаружены на магнитно-резонансном изображении, для корреляции результатов.
[018] Магнитно-резонансную томографию груди и ультразвуковую визуализацию выполняют с пациентом в различных положениях. Магнитно-резонансные томограммы груди обычно выполнены с пациентом, лежащим на животе (т.е. лицом вниз), без опоры на грудь (груди). Это может позволить за счет гравитации удлинить ткань груди для лучшей МРТ. В отличие от этого, ультразвуковое исследование обычно проводят с пациентом, лежащим на спине (т.е. лицом вверх), при этом рука со стороны сканирования поднята над головой, чтобы вытянуть ткань груди, позволяя при этом ультразвуковому зонду осуществлять адекватный акустический контакт с грудью. Из-за различных положений пациента ткань груди может быть подвержена различным сжимающим и растягивающим воздействиям, которые могут изменить форму и/или положение тканей груди. Кроме того, давление, оказываемое зондом на ткань, может также привести к смещению ткани груди, что может также вносить вклад в проблему корреляции данных визуализации между двумя различными методами. Различия в деформации груди между одним методом (например, МРТ) и вторым методом (например, ультразвуковая визуализация) могут затруднить для врача определение местоположения поражения, отмеченного на изображении, полученного от первого метода (например, МРТ), во время визуализации посредством другого метода (например, во время ультразвукового исследования). Например, поражение может принять другую форму, быть скрытым другой структурой ткани и/или появиться в другом местоположении внутри груди. Анатомические ориентиры (например, сосок, ареола) также могут изменить свой внешний вид, и/или может измениться их относительное местоположение по отношению к поражению. Кроме того, ультразвуковое исследование и магнитно-резонансная томография склонны к различным артефактам визуализации, которые могут препятствовать обнаружению местоположения поражения. Например, ультразвуковые изображения могут включать в себя затенение от связок Купера, которое не встречается при магнитно-резонансной томографии. В некоторых ситуациях, чтобы избежать артефактов, скрывающих поражение, проводящий ультразвуковое исследование врач может быть вынужден визуализировать поражение под углом, который соответствует другому виду груди, в отличие от магнитно-резонансного изображения.
[019] В настоящее время врачи вручную ищут поражения посредством сканирования методом «свободной руки» при ультразвуковых исследованиях. Для определения местоположения поражения может потребоваться большой объем сканирования ткани груди и/или большое количество углов сканирования. Время, необходимое для определения местоположений поражений, может быть значительным, особенно если грудь большая и/или имеется множество поражений. Опыт врача также может быть фактором времени, необходимого для обнаружения местоположений поражений во время ультразвукового исследования. Даже если врач обнаружит поражение во время ультразвукового исследования, он не может быть уверен в том, что поражения, обнаруженные во время ультразвукового исследования, соответствуют поражениям, обнаруженным на магнитно-резонансном изображении.
[020] Как раскрыто в данном документе, во время проведения последующего ультразвукового исследования, ультразвуковая система может получать данные визуализации от одного метода (например, один или несколько наборов объемных магнитно-резонансных данных). Данные визуализации или их части (например, набор объемных магнитно-резонансных данных или поднабор изображений из набора данных) могут быть загружены в систему ультразвуковой визуализации до проведения ультразвукового исследования. Представляющие интерес поражения могут быть уже отмечены в наборах магнитно-резонансных данных. Метки поражений в наборе магнитно-резонансных данных могут быть поставлены врачом в системе ультразвуковой визуализации, или может быть отмечен набор магнитно-резонансных данных (например, для выявления представляющих интерес поражений) до загрузки набора магнитно-резонансных данных в систему ультразвуковой визуализации. Система ультразвуковой визуализации может включать в себя модель деформации груди, которая может имитировать, как грудь, визуализированная с помощью магнитно-резонансной томографии, будет деформирована (например, по форме, местоположению) во время ультразвукового исследования. Модель деформации может анализировать данные магнитно-резонансной томографии и прогнозировать, где в груди могут находиться поражения, указанные в наборе магнитно-резонансных данных, во время ультразвукового исследования.
[021] Кроме того, система ультразвуковой визуализации может включать в себя графический пользовательский интерфейс (например, интерфейс определения местоположения поражения), который может обеспечить визуальное указание (например, графическое представление) груди, которая может быть взаимозаменяемым образом обозначена меткой груди, и прогнозируемые местоположения поражений во время ультразвукового исследования, основанные, по меньшей мере частично, на данных магнитно-резонансной томографии, скорректированных с помощью модели деформации. Графическое представление может указывать врачу на место в груди для сканирования с целью определения местоположения представляющего интерес поражения, отмеченного в наборе магнитно-резонансных данных. Руководство, предоставляемое интерфейсом определения местоположения поражения, работа которого может быть улучшена с помощью модели деформации, может сократить время, необходимое для определения местоположения поражения во время ультразвукового исследования и/или может повысить уверенность врача в том, что во время ультразвукового исследования было обнаружено то же самое поражение, как было отмечено на соответствующем магнитно-резонансном изображении.
[022] Хотя представленные здесь примеры описывают анализ магнитно-резонансных изображений груди для последующих ультразвуковых исследований, принципы настоящего раскрытия могут быть применены для анализа изображений рентгеновской маммографии и изображений других методов визуализации груди (например, трехмерный томосинтез груди). Например, при рентгеновской маммографии изображения обычно получают, когда пациент стоит, а грудь сжимается между двумя пластинами. Модель деформации системы ультразвуковой визуализации может быть применена к результирующим рентгеновским изображениям, а результирующее прогнозируемое местоположение поражения может быть предоставлено интерфейсом определения местоположения поражения врачу, проводящему ультразвуковое исследование.
[023] Раскрытая в данном документе система ультразвуковой визуализации может включать в себя пользовательский интерфейс, содержащий дисплей и пользовательское устройство ввода, память, функционально соединенную с пользовательским интерфейсом, и процессор, функционально соединенный с пользовательским интерфейсом и памятью. Память может включать в себя исполняемые процессором инструкции, которые при исполнении процессором побуждают пользовательский интерфейс обеспечить визуальное указание прогнозируемого местоположения поражения (например, схематичное изображение тела с наложенным на нее комментарием (отметкой)) и отобразить ультразвуковое изображение, полученное системой ультразвуковой визуализации. Память может также включать в себя исполняемые процессором инструкции, которые при исполнении процессором побуждают процессор применить модель деформации к ранее полученному изображению для определения прогнозируемого местоположения поражения и предоставления в пользовательский интерфейс прогнозируемого местоположения поражения. Пользовательский интерфейс может также принять фактическое местоположение поражения от пользовательского устройства ввода и обеспечить визуальное указание фактического местоположения поражения. Для дальнейшей помощи врачу пользовательский интерфейс может обеспечить визуальное указание по меньшей мере одного из предлагаемых положений (например, расстояние и угол ультразвукового зонда по отношению к какому-либо анатомическому ориентиру, например, соску), и/или обеспечить визуальное указание по меньшей мере одного из текущих положений ультразвукового зонда. В дополнение к ультразвуковым изображениям, полученным врачом во время ультразвукового исследования, пользовательский интерфейс может отображать ранее полученное изображение (например, магнитно-резонансное изображение).
[024] На фиг. 1 показана система 100 ультразвуковой визуализации, выполненная в соответствии с принципами настоящего раскрытия, в виде блок-диаграммы. Система 100 ультразвуковой визуализации может быть использована для реализации, по меньшей мере частично, любой из описанных здесь систем ультразвуковой визуализации. На фиг. 1 представлена система 100 ультразвуковой визуализации, включающая в себя ультразвуковой зонд 102, решетку 132 преобразователей, микролучеформирователь 130 (микроформирователь диаграммы направленности), переключатель 108 передачи/приема (T/R-переключатель), лучеформирователь 110 (формирователь диаграммы направленности), контроллер 114 передачи, сигнальный процессор 112, процессор 122 B-режима, сканирующий преобразователь 120 (скан-конвертер), устройство 126 многоплоскостного переформатирования (мультипланарный реформаттер), устройство 124 объемного рендеринга (объемный рендерер), процессор 118 изображений, графический процессор 116, пользовательский интерфейс 104, устройство 134 ввода и устройство 128 вывода. Компоненты, показанные на фиг. 1, являются лишь иллюстративными, при этом возможны другие варианты, в том числе исключение компонентов, комбинирование компонентов, переупорядочивание компонентов и замена компонентов.
[025] В системе 100 ультразвуковой визуализации на фиг. 1 ультразвуковой зонд 106 включает в себя решетку 132 преобразователей для передачи ультразвуковых волн и приема эхо-информации. Хорошо известны в данной области техники различные решетки преобразователей, например, линейные решетки, выпуклые решетки или фазированные решетки. Например, решетка 132 преобразователей может включать в себя двухмерную решетку (матрицу) преобразовательных элементов, способных сканировать как высотные, так и азимутальные измерения для 2D- и/или 3D-визуализации. Решетка 132 преобразователей может в некоторых случаях быть соединена с микролучеформирователем 130, обычно расположенным в ультразвуковом зонде 106, который управляет передачей и приемом сигналов с помощью преобразовательных элементов в решетке. В примере, показанном на фиг. 1, микролучеформирователь 130 соединен, например, кабелем зонда или по беспроводной связи, с переключателем 108 передачи/приема, который осуществляет переключение между передачей и приемом. Таким образом, переключатель 108 передачи/приема может защитить лучеформирователь 110 от сигналов передачи высоких энергии. В некоторых вариантах осуществления переключатель 108 передачи/приема и другие элементы системы могут быть включены в зонд с преобразователями, а не в отдельное основание ультразвуковой системы.
[026] Передача ультразвуковых лучей из решетки 132 преобразователей под управлением микролучеформирователя 130, если он присутствует в конкретном варианте осуществления, осуществляется контроллером 114 передачи, соединенным с переключателем 108 передачи/приема и лучеформирователем 110. Контроллер 114 передачи принимает входные данные от пользовательской команды устройства 134 ввода пользовательского интерфейса 104. Устройство 134 ввода может быть выполнено с помощью панели управления (например, сенсорного экрана, пульта оператора или их комбинации), которая может включать в себя программные и/или аппаратные элементы управления. Одной из функций, управляемых контроллером 114 передачи, является направление, в котором направляют лучи. Лучи могут быть направлены прямо от решетки (ортогонально к решетке) преобразователей или под разными углами для более широкого поля зрения. В вариантах осуществления, включающих в себя микролучеформирователь, сигналы c частично сформированным лучом (с частично сформированной диаграммой направленности), создаваемые микролучеформирователем 130, соединяются с лучеформирователем 110, в котором сигналы c частично сформированным лучом от отдельных участков преобразовательных элементов объединяются в сигнал с полностью сформированным лучом. В других вариантах осуществления сигналы от решетки 132 передаются к лучеформирователю 110, который формирует сигналы со сформированным лучом в ответ на сигналы из решетки.
[027] Сигналы со сформированным лучом могут быть соединены с сигнальным процессором 112. Сигнальный процессор 112 может обрабатывать принимаемые эхо-сигналы различными способами, такими как полосовая фильтрация, уменьшение размера изображения, разделение I и Q компонент, а также разделение гармонических сигналов. Сигнальный процессор 112 может также выполнять дополнительно усиление сигнала, такое как понижение уровня спеклов, смешивание сигналов и шумоподавление. Обработанные сигналы могут быть соединены с процессором 122 B-режима, который может использовать амплитудное детектирование для визуализации структур в организме. Сигналы, создаваемые процессором B-режима, могут быть подсоединены к сканирующему преобразователю 30 и устройству 126 многоплоскостного переформатирования в случаях получения 3D-данных. Сканирующий преобразователь 120 упорядочивает эхо-сигналы в пространственном отношении, из которого они были приняты, в требуемом формате изображения. Например, сканирующий преобразователь 120 может упорядочить эхо-сигнал в двухмерный (2D) секторообразный формат или пирамидальное трехмерное (3D) изображение. Устройство 126 многоплоскостного переформатирования может преобразовывать эхо-сигналы, которые принимаются из точек в общей плоскости в объемной области тела, в ультразвуковое изображение этой плоскости, как описано в патенте США №6443896 автора Детмер (Detmer). Устройство 124 объемного рендеринга преобразует эхо-сигналы трехмерного набора данных в проецируемое трехмерное изображение, как видно от заданной опорной точки, например, как описано в патенте США №6530885 авторов Энтрекин и др. (Entrekin et al.). Двухмерные или трехмерные изображения могут быть подсоединены от сканирующего преобразователя 120, устройства 126 многоплоскостного переформатирования и устройства 124 объемного рендеринга к процессору 118 изображений для дальнейшего усиления, буферизации и временного хранения для отображения на устройстве 128 вывода. Устройство 128 вывода может включать в себя устройство отображения, выполненное с использованием различных известных технологий отображения, таких как дисплей на основе жидких кристаллов (LCD), светодиодов (LED), органических светодиодов (OLED) или плазменный дисплей.
[028] Графический процессор 116 может генерировать накладные графические элементы для отображения с ультразвуковыми изображениями. Эти накладные графические элементы могут содержать, например, стандартную идентифицирующую информацию, такую как имя пациента, дата и время изображения, параметры визуализации и тому подобное. Графический процессор может принимать входные данные, например имя пациента, от устройства 134 ввода. Устройство 134 ввода может включать в себя один или несколько механических элементов управления, таких как кнопки, наборные диски, трекбол, физическую клавиатуру и другие, которые также могут быть названы в настоящем документе как аппаратные элементы управления. В качестве альтернативы или дополнения, устройство 134 ввода может включать в себя один или несколько программных элементов управления, таких как кнопки, меню, виртуальная клавиатура и другие элементы управления пользовательского интерфейса, выполненные, например, с помощью сенсорной технологии (например, резистивные, емкостные или оптические сенсорные экраны). С этой целью система 100 ультразвуковой визуализации может включать в себя процессор пользовательского интерфейса (например, процессор 140), который может управлять операциями пользовательского интерфейса, например, функциями, связанными с программными элементами управления. Один или несколько пользовательских элементов управления могут быть размещены на панели управления. Например, один или несколько механических элементов управления могут быть установлены на консоли и/или один или несколько программных элементов управления могут быть размещены на сенсорном экране, который может быть присоединен к консоли или встроен в нее.
[029] Ультразвуковые изображения и соответствующие накладные графические элементы могут храниться в памяти 136, например, для автономного анализа (оффлайн). В некоторых вариантах осуществления память 136 может включать в себя локальную память, предоставляемую в основании ультразвуковой системы. В некоторых вариантах осуществления память 136 может включать в себя запоминающее устройство системы архивации и передачи изображений (PACS, от англ. picture archiving and communication system). В некоторых вариантах осуществления ультразвуковые изображения и соответствующие данные могут храниться как локально, так и удаленно на сервере PACS. Как описано в данном документе, в памяти 136 могут храниться изображения, полученные от других систем визуализации. Например, в памяти 136 могут храниться изображения, полученные другой системой ультразвуковой визуализации, системой магнитно-резонансной томографии и/или рентгеновской маммографической системой.
[030] Кроме того, в памяти 136 могут храниться исполняемые процессором инструкции, включая инструкции по исполнению функций, связанных с пользовательским интерфейсом 104. Пользовательский интерфейс 104 также может быть соединен с устройством 126 многоплоскостного переформатирования для выбора и управления отображением нескольких изображений, подвергнувшихся многоплоскостному переформатированию (MPR-изображений). Как описано в данном документе, в памяти 136 могут храниться исполняемые процессором инструкции, включая инструкции по выполнению функций, связанных с моделью деформации тканей. В некоторых вариантах осуществления память 136 может включать в себя несколько памятей.
[031] В некоторых вариантах осуществления функциональные возможности двух или более обрабатывающих компонентов (например, лучеформирователя 110, сигнального процессора 112, процессора 122 B-режима, сканирующего преобразователя 120, устройства 126 многоплоскостного переформатирования, устройства 124 объемного рендеринга, процессора 118 изображений, графического процессора 116, процессора 140 и т.д.) могут быть объединены в один блок обработки или могут быть разделены на несколько блоков обработки. Например, процессор 140 может включать в себя два процессора: процессор пользовательского интерфейса и процессор модели деформации. В другом примере графический процессор 116 и процессор 118 изображений могут быть объединены в один процессор.
[032] В соответствии с принципами настоящего раскрытия к ультразвуковому зонду 106 может быть присоединен датчик 138, который может быть функционально связан с системой 106 отслеживания положения (например, с электромагнитной (ЭМ) системой отслеживания), чтобы можно было отслеживать и/или регистрировать пространственное местоположение зонда. Процессор 140 может быть выполнен с возможностью регистрации ультразвукового зонда 106 относительно пациента и определения пространственного положения зонда относительно пациента на основе регистрационных данных, а также данных о положении, полученных с помощью системы 102 отслеживания положения. Также процессор может быть выполнен с возможностью связывания данных о положении с изображениями, полученными с помощью зонда с отслеживаемым положением.
[033] В соответствии с принципами настоящего раскрытия, процессор 140 может быть выполнен и/или дополнительно выполнен с возможностью приема изображений и/или данных, связанных с изображениями, полученными другой системой визуализации, например, хранящимися в памяти 136. Процессор 140 может быть выполнен с возможностью применения модели деформации ткани, основанной по меньшей мере частично на принятых изображениях и/или данных, для генерирования прогнозируемых местоположений объектов (например, поражений, анатомических ориентиров) внутри ткани. Процессор 140 может предоставить прогнозируемые местоположения процессору 124 изображения, графическому процессору 116, памяти 136 и/или пользовательскому интерфейсу 104.
[034] Процессор 140 может принимать инструкции для модели деформации из памяти 136. В некоторых вариантах осуществления процессор 140 может принимать дополнительные данные от пользователя (например, от врача) через пользовательское устройство 134 ввода. Например, пользователь может предоставить данные о размерах (например, ширина груди, объем) и/или составе тканей (например, жир, железа, мышцы). В некоторых вариантах осуществления процессор 140 может применять к принятым изображениям сегментационную модель для определения состава и/или размеров ткани. В другом примере пользователь может указать местоположение поражений на изображениях, полученных другой системой визуализации. В еще одном примере пользователь может указать тип применяемой модели деформации (например, положение пациента на спине в положение на животе, сжатое в несжатое).
[035] Пример модели деформации тканей, который может быть использован для реализации модели деформации тканей в некоторых вариантах осуществления, описан в заявке на патент США № 13/666600 "Аппарат и способы компенсации деформации органов внутренних структур относительно изображений и их применение" авторов Мига и др. (Miga, et al). Модель деформации тканей может быть моделью деформации груди в некоторых вариантах осуществления. Пример модели деформации груди, который может быть использован для реализации модели деформации тканей, описан в заявке на патент США № 14/000068 "Система и способ обеспечения совмещения форм груди до и во время хирургической операции" авторов Барт и др. (Barth, et al.). Дополнительные примеры моделей деформации груди, которые могут быть использованы в некоторых вариантах осуществления, описаны в статье "Моделирование деформации груди: Сравнение способов получения индивидуальной для пациента ненагруженной конфигурации" авторов Б. Эйбен и др., Медицинская визуализация 2014: Процедуры под визуальным контролем, роботизированные вмешательства и моделирование, Материалы конференции общества инженеров фотооптического приборостроения, том 9036, 903615 (“Breast Deformation Modelling: Comparison of Methods to Obtain a Patient Specific Unloaded Configuration,” Eiben, B., et al., Medical Imaging 2014: Image-Guided Procedures, Robotic Interventions, and Modeling, Proc. Of SPIE Vol. 9036, 903615) и в статье "Биомеханически управляемое совмещение изображений МРТ груди в положении лежа на животе и на спине с использованием оценочного референтного состояния", Эйбен и др., 2013 г., 10-й Международный симпозиум по биомедицинской визуализации Института инженеров по электротехнике и электронике: От нано до макро, Сан-Франциско, Калифорния, США, 7-11 апреля 2013 года (“Biomechanically Guided Prone-to-Supine Image Registration of Breast MRI Using an Estimated Reference State,” Eiben, B., et al., 2013 IEEE 10th International Symposium on Biomedical Imaging: From Nano to Macro, San Francisco, CA, USA, April 7-11, 2013). Эти модели деформации тканей представлены только для примера. Принципы настоящего раскрытия не ограничены приведенными примерами.
[036] На фиг. 2 показана иллюстрация системы ультразвуковой визуализации, которая может быть использована для визуализации груди в соответствии с принципами настоящего раскрытия. На фиг. 2 показана система 200 ультразвуковой визуализации, устройство 202 ультразвуковой визуализации, зонд 204, дисплей 206, изображение 208 в реальном времени, система 210 отслеживания положения, пациент 212, пользовательский интерфейс 216, шарнирная консоль 218, сенсорный экран 220, основание 222 и интерфейс 224 определения местоположения поражения. Компоненты, показанные на фиг. 2, являются просто иллюстративными, и все они подразумевают другие варианты, включая устранение компонентов, комбинирование компонентов, перестановку компонентов и замену компонентов.
[037] Система 200 ультразвуковой визуализации может включать в себя один или несколько компонентов системы 100 ультразвуковой визуализации, показанных на фиг. 1. Система 200 ультразвуковой визуализации может включать в себя устройство 202 ультразвуковой визуализации, которое может представлять собой устройство ультразвуковой визуализации на основе тележки, ручное устройство визуализации или другое портативное устройство визуализации. Например, в основании 222, которое может быть подвижным основанием, могут быть предусмотрены один или несколько обрабатывающих компонентов устройства 202 ультразвуковой визуализации (например, лучеформирователь, память, сигнальный процессор, процессор B-режима, сканирующий преобразователь, устройство многоплоскостного переформатирования, устройство объемного рендеринга, процессор изображения, графический процессор и/или другие процессоры, которые могут управлять различными операциями устройства ультразвуковой визуализации). Система 200 ультразвуковой визуализации может включать в себя дисплей 206. Дисплей 206 может быть прикреплен к основанию 222 через шарнирную консоль 218 для изменения положения дисплея 206 таким образом, чтобы отображенное на нем изображение было доступно для просмотра другими людьми (например, пациентом, другим врачом ультразвукового исследования или просто другим врачом).
[038] Устройство 202 ультразвуковой визуализации может быть соединено с зондом 204 через проводное (например, кабельное) или беспроводное (например, Wi-Fi) соединение. Зонд 204 может быть использован для сканирования тканей груди пациента (например, пациента 212). Зонд 204 может быть выполнен с возможностью использования метода «свободной руки». Под методом «свободной руки» обычно подразумевают, что зонд управляется (например, перемещается) врачом (например, лаборантом ультразвукового исследования, рентгенологом), а не исполнительным элементом, управляемым машиной. Управление работой зонда 204 может частично осуществляться через пользовательский интерфейс 216. Пользовательский интерфейс 216 может включать в себя входные компоненты, такие как механические и программные элементы управления, и выходные компоненты, такие как визуальные, звуковые и тактильные устройства обратной связи. Один или несколько компонентов пользовательского интерфейса 216 могут быть реализованы с помощью элементов графического пользовательского интерфейса (GUI), которые могут быть представлены на дисплее 206, сенсорном экране 220 или их комбинациях. Например, изображения (например, изображение 208 в реальном времени), полученные с помощью зонда 204, могут отображаться на дисплее 206, на сенсорном экране 220 или на том и другом. Изображения, полученные ранее системой 200 ультразвуковой визуализации и/или другой системой визуализации (например, системой МРТ), могут быть представлены на дисплее 206, сенсорном экране 220 или на том и другом. В некоторых вариантах осуществления ранее полученные изображения могут отображаться одновременно с изображением 208 в реальном времени. Пользовательский интерфейс может быть выполнен с возможностью предоставления элементов графического пользовательского интерфейса для управления работой ультразвуковой системы. Например, один или несколько элементов управления графическим пользовательским интерфейсом могут быть представлены на сенсорном экране 220.
[039] Пользовательский интерфейс 216 может включать в себя интерфейс 224 определения местоположения поражения. Интерфейс 224 определения местоположения поражения может обеспечивать один или несколько элементов пользовательского интерфейса, чтобы помочь врачу определить местоположение поражения, ранее обнаруженного на изображении от другой системы визуализации (например, системы магнитно-резонансной томографии). Один или несколько элементов интерфейса 224 определения местоположения поражения могут быть реализованы в виде элементов графического пользовательского интерфейса, которые могут быть представлены на дисплее 206, сенсорном экране 220 или их комбинации. Один или несколько элементов интерфейса 224 определения местоположения поражения могут быть обеспечены в одном или нескольких окнах интерфейса одновременно или в разное время.
[040] Интерфейс определения местоположения поражения может включать в себя элементы управления определением местоположения, которые могут включать в себя элементы управления графическим пользовательским интерфейсом, представленные на сенсорном экране 220, примеры которых будут описаны ниже. В некоторых вариантах осуществления, например, на обычной рабочей станции, элементы управления определением местоположения могут быть реализованы с помощью элементов управления графическим пользовательским интерфейсом, реагирующих на обычные устройства ввода, такие как мышь, трекбол, сенсорная панель, клавиатура и т.п. Элементы управления определением местоположения могут позволить пользователю обеспечить указание предполагаемого местоположения поражения относительно ранее полученных данных изображения (например, данных визуализации, полученных с помощью первого метода, такого как магнитно-резонансная томография), причем указанное предполагаемое положение затем может быть использовано для генерирования прогнозируемого местоположения поражения при ультразвуковом сканировании ткани. Прогнозируемое местоположение поражения может быть сгенерировано на основе модели деформации, которая учитывает разницу в положении пациента в двух методах визуализации. Прогнозируемое местоположение поражения может быть использовано для направления последующего ультразвукового сканирования, например, путем обеспечения графического представления прогнозируемого местоположения поражения на анатомически репрезентативном графическом изображении интерфейса 224 определения местоположения поражения. Интерфейс 224 определения местоположения поражения может включать в себя графические изображения, которые могут быть отображены на дисплее ультразвуковой системы, на дисплее рабочей станции или другом дисплее. Графические изображения могут быть выполнены с возможностью отображения информации (например, одна или несколько меток, которые могут указывать на прогнозируемое место поражения) анатомически разумным способом, например, путем отображения меток 228 на анатомически репрезентативном графическом изображении 226 или рядом с ним (также называемом схематичным изображением (схемой, знаком) тела). Анатомически репрезентативное графическое изображение 226 может включать в себя двухмерное или трехмерное изображение анатомической части или органа. В настоящем контексте “анатомически разумный“ может в качестве альтернативы или дополнения относиться к автоматическому размещению меток 228 на анатомически репрезентативном графическом изображении, которые могут указывать на прогнозируемое местоположение поражения на основании указанного предполагаемого местоположения поражения в ранее полученном наборе данных, скорректированном с помощью модели деформации. Как описано выше, данные изображения могут быть получены с помощью зонда с отслеживаемым положением, таким образом, “анатомически разумный“ может альтернативно или дополнительно относиться к автоматическому размещению меток 228 на схематичном изображении 226 тела на основании положения зонда во время получения конкретного изображения (например, графического изображения, указывающего текущее положение и/или угол зонда по отношению к анатомии, предлагаемое положение и/или угол зонда, и/или их комбинацию). В проиллюстрированном примере анатомически репрезентативным графическим изображением 226 может быть графическое изображение груди, иллюстрирующее сторону груди, соответствующую визуализируемой груди. На графическое изображение груди могут быть наложены одна или несколько меток 228, как будет описано далее. Метки 228 могут быть также размещены рядом (например, над, под или на любой стороне схематичного изображения тела). Метки 228 (например, символы и/или индикаторы) могут включать в себя буквенно-цифровые символы и/или геометрические формы. В некоторых вариантах осуществления графическое изображение 226 может не быть анатомически репрезентативным, а может иметь форму круговой диаграммы с наложенной на нее меткой или представленной рядом с круговой диаграммой.
[041] Система 200 ультразвуковой визуализации может быть функционально связана с системой 210 отслеживания положения. Система 210 отслеживания положения может быть электромагнитной (ЭМ) системой отслеживания. Электромагнитная система отслеживания обычно включает в себя генератор электромагнитного поля и датчик. Датчик может быть прикреплен к зонду 204 (например, встроен в кожух зонда 204 или находится снаружи). В некоторых вариантах осуществления может быть использован настольный генератор электромагнитного поля. Генератор электромагнитного поля может быть подвижным по отношению к опорной поверхности, поддерживающей пациента (например, смотровой стол), и, таким образом, по отношению к пациенту. Это может позволить изменить положение генератора электромагнитного поля таким образом, чтобы электромагнитное поле охватывало орган или ткань, подлежащие сканированию (например, левую грудь, правую грудь). В некоторых вариантах осуществления генератор электромагнитного поля может быть закреплен по отношению к опорной поверхности. В других вариантах осуществления может быть использован другой тип системы отслеживания положения, такой как оптическая система отслеживания (например, видео, инфракрасная).
[042] Данные визуализации, полученные с помощью зонда с отслеживаемым положением, могут обеспечить возможность процессору системы 200 ультразвуковой визуализации определить относительные положения объектов в пределах генерируемых ими ультразвуковых изображений. Например, процессор системы 200 ультразвуковой визуализации может оценить пространственное положение зонда относительно пациента 212, используя данные о положении от системы 210 отслеживания положения, которые затем могут облегчить извлечение соответствующей информации из изображений, полученных с помощью зонда с отслеживаемым положением (например, зонда 204). Например, система ультразвуковой визуализации может коррелировать изображения, полученные с помощью зонда с отслеживаемым положением, с изображениями, полученными другой системой визуализации, и/или изображениями, полученными во время предыдущего ультразвукового исследования. Данные о положении зонда могут включать в себя информацию о его положении, например, положение и ориентацию зонда в трехмерном пространстве. Система 200 ультразвуковой визуализации может обеспечить возможность пользователю зарегистрировать зонд 204 относительно анатомии пациента. Например, система 200 ультразвуковой визуализации может быть выполнена с возможностью привязывания пространственного положения зонда, во время его размещения в соответствующих анатомических ориентирах (например, сосок груди, границы груди и т.д.), к соответствующему ориентиру.
[043] Как описано выше, устройство 202 ультразвуковой визуализации может принимать изображения, полученные от другой системы визуализации, например, магнитно-резонансной системы. Принятые изображения могут быть сохранены в памяти, содержащейся в устройстве 202 ультразвуковой визуализации. В некоторых вариантах осуществления принятые изображения и/или ультразвуковые изображения, полученные с помощью системы 200 ультразвуковой визуализации, могут быть сохранены в файлах изображений с одним или несколькими кадрами в соответствии со стандартным форматом (например, форматом DICOM), дополненным соответствующим местоположением поражения и/или данными о положении зонда. В некоторых вариантах осуществления местоположение поражения может быть отмечено, например, с использованием угла азимута (по условному часовому циферблату), расстояния от соска и глубины от линии кожи. В некоторых вариантах осуществления врач может просматривать принятые изображения на дисплее 206 и/или сенсорном экране 220 и добавлять метки посредством пользовательского интерфейса 216, указывая информацию о местоположении поражения на принятых изображениях. В некоторых вариантах осуществления врач может также указать тип и/или состав ткани на изображении. Например, врач может вручную отсечь различные участки принятых изображений от другой системы визуализации, чтобы указать тип и/или состав ткани.
[044] Принятые данные изображения от предыдущего метода, которые в некоторых случаях могут включать в себя информацию, указывающую на метки предполагаемых местоположений поражений, могут быть переданы процессору, включенному в устройство 202 ультразвуковой визуализации. Процессор может применить модель деформации ткани к принятым данным изображения для определения одного или нескольких прогнозируемых местоположений поражений. Прогнозируемые местоположения поражений могут быть предоставлены врачу посредством интерфейса 224 определения местоположения поражения, например, посредством графического изображения, указывающего наиболее вероятное местоположение поражения 228 на схематичном изображении 226 тела. В некоторых вариантах осуществления процессор может также определить предлагаемое размещение зонда по отношению к анатомии (например, положение и/или угол ультразвукового зонда 204 по отношению к соску или другому анатомическому ориентиру) для ультразвуковой визуализации поражений.
[045] Система 200 ультразвуковой визуализации может одновременно отображать интерфейс 224 определения местоположения поражения, импортированные изображения или наборы данных от другого метода визуализации и/или ультразвуковое изображение 208 в реальном времени. Врач может сохранять и/или комментировать полученные ультразвуковые изображения во время исследования (ставить на них отметки). Пользователь также может продолжать отмечать различные поражения на импортированных данных (например, от магнитно-резонансной томографии) во время исследования. В некоторых вариантах осуществления изображение из ранее полученных данных изображения одновременно отображается, например, для того, чтобы пользователь мог отметить предполагаемые местоположения поражений, которые затем используются для сгенерированных прогнозируемых местоположений поражений для второго метода визуализации (в данном случае, ультразвукового исследования). Дополнительные метки к принятому изображению могут быть использованы процессором для пересмотра прогнозируемого местоположения поражения, а пересмотренный прогноз может быть обновлен в интерфейсе 224 определения местоположения поражения.
[046] При обнаружении поражения ультразвуковым зондом 204 врач может отметить на ультразвуковом изображении фактическое местоположение поражения. Если фактическое местоположение поражения отличается от прогнозируемого, графическое изображение прогноза поражения внутри интерфейса 224 определения местоположения поражения может быть обновлено для указания фактического местоположения поражения. В некоторых вариантах осуществления фактическое местоположение и прогнозируемое местоположение поражения могут отображаться одновременно с помощью интерфейса 224 определения местоположения поражения. Это может предоставить врачу оценку того, насколько неточным могут быть прогнозируемые местоположения дополнительных поражений. В некоторых вариантах осуществления фактическое местоположение поражения может быть предоставлено процессору. Процессор может использовать разницу между прогнозируемыми и фактическими местоположениями поражений для адаптивного изменения модели деформации, что может повысить точность модели деформации.
[047] После обнаружения поражения во время ультразвукового исследования врач может измерить его размеры и/или другие свойства (например, жесткость). Эти дополнительные измерения могут быть отображены на экране и сохранены вместе с изображением и/или набором изображений (например, кинопетлей). Врач может также использовать систему 200 ультразвуковой визуализации для проведения биопсии поражения. Ультразвуковые изображения, связанные с ними измерения и/или положения поражений (например, фактические местоположения поражений, прогнозируемые местоположения поражений) могут быть сохранены в памяти системы 200 ультразвуковой визуализации. Изображения и/или комментарии (отметки) могут быть автоматически сохранены системой ультразвуковой визуализации и/или в ответ на входные данные врача. Ультразвуковые изображения и/или комментарии (отметки) могут быть пересмотрены после ультразвукового исследования.
[048] В соответствии с принципами настоящего раскрытия, пользовательский интерфейс (например, пользовательский интерфейс 216) системы ультразвуковой визуализации может быть выполнен с возможностью обеспечения визуального указания прогнозируемых местоположений поражений на основе прогнозируемых местоположений поражений, определяемых моделью деформации. Прогнозируемые местоположения поражений могут быть определены, по меньшей мере частично, на основе меток местоположений поражений на изображениях, полученных другой системой визуализации. В некоторых вариантах осуществления визуальное указание прогнозируемых местоположений поражений может быть обеспечено путем отображения схематичного изображения тела, с наложенной на него релевантной информацией о местоположении поражения (например, один или несколько указателей местоположения, комментарии (отметки) или другие). В некоторых вариантах осуществления на схематичное изображение тела может быть наложено предлагаемое местоположение ультразвукового зонда и/или угол или линия, представляющая фактическое положение ультразвукового зонда, на основе отслеживания местоположения.
[049] На фиг. 3 и фиг. 4 приведены примеры элементов пользовательского интерфейса в соответствии с принципами настоящего раскрытия. Пользовательский интерфейс может быть выполнен с возможностью предоставления интерфейса определения местоположения поражения, который может включать в себя один или более элементов пользовательского интерфейса для определения местоположений поражений, получения и/или комментирования ультразвуковых изображений груди (выставления на них отметок) и/или обозначения местоположений поражений на изображениях, принятых от другой системы визуализации. Например, интерфейс определения местоположения поражения может быть выполнен с возможностью отображения схематичного изображения тела, которое в случае ультразвукового исследования груди может быть графическим изображением груди. Графическое изображение груди может обеспечить иллюстрацию соответствующей стороны груди, которую визуализируют и/или характеризуют, например, графическое изображение правой груди может быть отображено при визуализации или характеризации правой груди, а графическое изображение левой груди может быть отображено при визуализации или характеризации левой груди. На схематичное изображение тела может быть наложена соответствующая информация о местоположении поражения, например, один или несколько указателей, связанных с отдельными прогнозируемыми и/или фактическими местоположениями поражений или областями одного или нескольких прогнозируемых местоположений поражений.
[050] На фиг. 3 показаны элементы пользовательского интерфейса, связанные с интерфейсом 300 определения местоположения поражения в соответствии с принципами настоящего раскрытия. На фиг. 3 показан интерфейс 300 определения местоположения поражения, принятое изображение 302, изображение 304 в реальном времени, схематичные изображения 306 и 308 тела, соответственно. Один или несколько элементов интерфейса 300 определения местоположения поражения могут быть отображены на дисплее системы ультразвуковой визуализации, например, на дисплее 206. Один или несколько элементов интерфейса 300 определения местоположения поражения могут дополнительно или альтернативно быть отображены на сенсорном экране, например, на сенсорном экране 220 системы 200 ультразвуковой визуализации. Элементы интерфейса 300 определения местоположения поражения могут быть предоставлены одновременно или последовательно и могут быть расположены в одном или нескольких окнах интерфейса. Кроме того, хотя это и не показано на фиг. 3, интерфейс 300 определения местоположения поражения может обеспечивать один или несколько пользовательских элементов управления, таких как схематичное изображение, графические изображения и кнопки комментирования (выставления отметок), которые могут быть обеспечены, например, на сенсорном экране 220 системы 200 ультразвуковой визуализации. Конкретные примеры или расположение элементов пользовательского интерфейса носят исключительно иллюстративный характер, а другие варианты осуществления (например, аппаратные или программные элементы управления) или расположение элементов могут быть использованы, не выходя за рамки настоящего раскрытия. Один или несколько элементов интерфейса 300 определения местоположения поражения могут быть использованы для реализации интерфейса 224 определения местоположения поражения в примере, приведенном на фиг. 2.
[051] Принятое изображение 302 может представлять собой изображение от другой системы визуализации, включающее в себя поражение, которое врач ищет во время ультразвукового исследования. В некоторых вариантах осуществления, принятое изображение 302 представляет собой отдельный срез из набора объемных данных, полученных от груди в другом методе. Пользователь может вручную просматривать путем прокрутки различные срезы в наборе объемных данных до тех пор, пока не отобразится нужный срез. В этот момент пользователь может указать, где на срезе находится интересующее его поражение. В других вариантах осуществления, когда объемные данные частично совмещены с ультразвуковым изображением в реальном времени, принятое изображение 302 может представлять собой изображение из набора принятых изображений (например, срезов объема), которое соответствует местоположению в ткани, которое врач в текущий момент времени визуализирует с помощью системы ультразвуковой визуализации. То есть отслеживание местоположения в ультразвуковом зонде может определить, из какого места в ткани получено изображение 304 в реальном времени. Местоположение может быть предоставлено процессору, а процессор может получить соответствующее принятое изображение 302 для отображения.
[052] Схематичное изображение 306 тела может включать в себя комментарий (отметку), указывающий на анатомию прогнозируемого местоположения поражения. В примере, показанном на фиг. 3, заштрихованный эллипсоид указывает на область груди, в которой спрогнозировано расположение поражения. Предоставление врачу прогнозируемого местоположения может уменьшить объем, который будет опрашиваться во время ультразвукового исследования, и/или время, необходимое для определения местоположения поражения. В некоторых вариантах осуществления, не показанных на фиг. 3, схематичное изображение 306 тела может включать в себя дополнительный индикатор, позволяющий предложить положение и/или угол ультразвукового зонда для определения местоположения поражения.
[053] Изображение 304 в реальном времени может представлять собой изображение, полученное в текущий момент времени ультразвуковым зондом. В некоторых вариантах осуществления изображение 304 в реальном времени может быть заменено на ультразвуковое изображение, сохраненное врачом. Например, врач может получить ультразвуковое изображение или изображения и приостановить исследование, чтобы добавить к полученному изображению комментарии (отметки). Комментарии могут включать в себя метку фактического местоположения поражения, его размеры и/или другие свойства (например, жесткость). Изображение и/или комментарии могут быть сохранены в памяти системы ультразвуковой визуализации для последующего просмотра. После получения изображения и/или его комментирования врач может вернуться к получению изображений в реальном времени или закончить исследование.
[054] Схематичное изображение 308 тела может включать в себя комментарий (отметку), указывающий место, в котором на анатомии находится прогнозируемое местоположение поражения, аналогично схематичному изображению 306 тела. В некоторых вариантах осуществления, как показано на фиг. 3, схематичное изображение 308 тела может включать в себя дополнительное графическое изображение, указывающее текущее положение и/или угол ультразвукового зонда. В некоторых вариантах осуществления представлено только схематичное изображение 306 или 308 тела.
[055] Когда во время ультразвукового исследования должно быть обнаружено множество поражений, интерфейс 300 определения местоположения поражения может обеспечить визуальные указания прогнозируемых местоположений всех поражений, которые должны быть обнаружены. В качестве альтернативы интерфейс 300 определения местоположения поражения может предоставить прогнозируемое местоположение для одного поражения за один раз. Врач может переключаться между прогнозируемыми местоположениями множества поражений. В некоторых вариантах осуществления интерфейс 300 определения местоположения поражения может обеспечить указание, какое поражение набора поражений в текущий момент времени обнаружено врачом (например, 1-е из 2-ух, 3-е из 4-ех). Это может уменьшить вероятность того, что врач закончит исследование до обнаружения всех поражений. Когда врач отмечает фактическое местоположение поражения, интерфейс 300 определения местоположения поражения может автоматически связывать фактическое местоположение с конкретным поражением на принятом изображении и/или врач может вручную указать, с каким поражением на принятом изображении связано фактическое местоположение.
[056] На фиг. 4 показаны схематичные изображения тела и связанные с ними комментарии (отметки) в соответствии с принципами настоящего раскрытия. Схематичное изображение 400 тела включает в себя комментарий (отметку) 402, который указывает прогнозируемое местоположение поражения. Аналогичным образом, схематичное изображение 404 тела включает в себя комментарии (отметки) 406a и 406b, которые указывают прогнозируемые местоположения множественных поражений. Хотя комментарии 402, 406a и 406b показаны кружками, могут использоваться и другие комментарии (например, X, квадраты, числа). Схематичное изображение 408 тела включает в себя комментарий (отметку) 410, который представляет собой заштрихованный эллипсоид области, в которой расположены одно или несколько прогнозируемых местоположений поражений. Схематичное изображение 412 тела включает в себя комментарии 414 и 416, которые указывают прогнозируемое местоположение и фактическое местоположение поражения внутри области, соответственно. Фактическое местоположение может быть добавлено врачом посредством пользовательского устройства ввода системы ультразвуковой визуализации. Хотя комментарии 410 и 414 показаны как эллипсоиды, могут быть использованы и другие зональные указатели (например, квадрант, радиальный сегмент). Схематичное изображение 418 тела включает в себя комментарий 420, который указывает область, в которой расположены одно или несколько прогнозируемых местоположений поражений, и комментарий 422, который указывает предлагаемое местоположение зонда для визуализации поражения. Схематичное изображение 424 тела также включает в себя комментарии 426 и 428, которые указывают область, в которой расположены одно или несколько прогнозируемых местоположений поражений, и предлагаемое местоположение ультразвукового зонда для визуализации поражения, соответственно. Кроме того, схематичное изображение 424 тела включает в себя комментарий 430, который указывает текущее положение ультразвукового зонда. Текущее положение может быть определено с помощью системы отслеживания зонда, описанной в данном документе. Комментарий 430 может быть обновлен на схематичном изображении 424 тела по мере перемещения врачом ультразвукового зонда. Схематичные изображении тела и комментарии (отметки), показанные на фиг. 4, приведены только для примера. Могут быть предоставлены другие виды комментариев и/или комбинации комментариев. В некоторых вариантах осуществления врач может выбрать, какие комментарии предоставляют на схематичном изображении тела посредством пользовательского интерфейса.
[057] Система ультразвуковой визуализации, описанная в данном документе, может применить модель деформации к ранее полученному изображению, отобразить прогнозируемое местоположение поражения, получить ультразвуковое изображение в реальном времени и отобразить ультразвуковое изображение в реальном времени. Система ультразвуковой визуализации может отобразить ранее полученное изображение. Во время исследования система ультразвуковой визуализации может принять фактическое местоположение поражения от пользовательского устройства ввода и отобразить фактическое местоположение поражения врачу, проводящему исследование. Фактическое местоположение поражения и ультразвуковое изображение в реальном времени, связанное с фактическим местоположением поражения, могут быть сохранены в системе ультразвуковой визуализации. Это может быть сделано в ответ на входные данные врача или автоматически в некоторых вариантах осуществления.
[058] Система ультразвуковой визуализации может выполнять один или несколько описанных в данном документе способов. Например, способ, выполняемый по меньшей мере частью системы ультразвуковой визуализации (например, процессором), может включать в себя прием прокомментированного изображения (т.е. с отметками) (например, магнитно-резонансный объем с отмеченным местоположением поражения), прием типа модели деформации (например, положение пациента на спине в положение на животе), применение модели деформации к прокомментированному изображению для генерирования прогнозируемого местоположения поражения и предоставление интерфейсу определения местоположения поражения (например, интерфейсу 224 определения местоположения поражения) прогнозируемых местоположений поражений.
[059] На фиг. 5 показана блок-схема 500 примерного процесса определения местоположений поражений, отмеченных на ранее полученных изображениях, при текущем ультразвуковом исследовании в соответствии с принципами настоящего раскрытия. На шаге 502 врач может загрузить ранее полученные изображения в систему ультразвуковой визуализации (например, систему 100 ультразвуковой визуализации или систему 200 ультразвуковой визуализации). Ранее полученные изображения могут быть получены с помощью системы магнитно-резонансной томографии или системы трехмерного томосинтеза груди. На шаге 504 врач может просмотреть загруженные изображения на дисплее системы ультразвуковой визуализации и отметить на изображениях местоположения предполагаемых поражений посредством пользовательского интерфейса. Шаг 504 может быть пропущен, если на изображениях уже есть метки поражений. Врач может ввести свойства ткани (например, состав, размеры) на шаге 506, который включает в себя, но не ограничивается этим, идентификацию областей на принятых изображениях, имеющих железистую ткань, и других областей, имеющих жировую ткань, а также положение грудной стенки и мышц грудной стенки. В качестве альтернативы, система ультразвуковой визуализации может автоматически обрабатывать загруженные изображения для определения свойств ткани на шаге 506. На шаге 508 может быть выбрана применяемая модель деформации ткани. Например, если загруженные изображения были получены с помощью системы магнитно-резонансной томографии, может быть выбрана модель деформации положения пациента на животе в положение на спине. В некоторых вариантах осуществления настоящего раскрытия, врач может выбрать модель деформации ткани для применения. В некоторых других вариантах настоящего раскрытия применяемая модель деформации тканей может быть выбрана автоматически системой ультразвуковой визуализации.
[060] После того, как система ультразвуковой визуализации применит модель деформации, врач может просмотреть визуальные указания прогнозируемых местоположений поражений на шаге 510. В некоторых вариантах осуществления прогнозируемые местоположения поражений могут быть представлены на дисплее, включающем в себя интерфейс определения местоположения поражения. На шаге 512 врач может получить одно или несколько ультразвуковых изображений с помощью ультразвукового зонда. Местоположение, в котором врач получает изображения, может быть основано по меньшей мере частично на прогнозируемых местоположениях поражений, представленных на дисплее. Когда поражение обнаружено, врач может прокомментировать ультразвуковое изображение, чтобы указать фактическое местоположение поражения на шаге 514. В некоторых вариантах осуществления врач может сохранить изображение и/или комментарий. В некоторых вариантах осуществления изображение и/или комментарий могут быть сохранены автоматически. При желании, на шаге 516 врач может сделать измерения (например, размеры, свойства) поражения и/или добавить дополнительные комментарии (отметки). В некоторых вариантах осуществления врач может провести биопсию поражения. Биопсия может быть проведена на основе ультразвуковых изображений. Если на ранее полученных изображениях было обнаружено множество поражений, то для каждого поражения могут быть повторены шаги 510-516.
[061] На фиг. 6 показана блок-схема 600 процесса определения прогнозируемых местоположений поражений в соответствии с принципами настоящего раскрытия. В некоторых вариантах осуществления, процесс, показанный на фиг. 6, может быть исполнен процессором (например, процессором 140). Инструкции по исполнению процесса в блок-схеме 600 могут быть сохранены в виде инструкций, исполняемых процессором, в памяти, доступной для процессора в некоторых вариантах осуществления. На шаге 602 может быть принято одно или несколько прокомментированных изображений и/или данных изображений. Принятые изображения могут соответствовать ранее полученным изображениям. Комментарии могут включать в себя информацию о местоположении поражения. Ранее полученные изображения могут быть получены другой системой визуализации.
[062] На шаге 604 изображения могут быть сегментированы и/или иным образом обработаны для извлечения характеристик тканей (например, размера, состава). В качестве альтернативы, на шаге 606 могут быть приняты характеристики тканей, например, предоставленные врачом посредством пользовательского устройства ввода. В некоторых вариантах осуществления могут быть выполнены шаги 604 и 606. То есть некоторые характеристики ткани могут быть определены путем анализа изображений, в то время как другие характеристики ткани принимают отдельно. На шаге 608 может быть принят тип модели деформации ткани. Тип модели деформации может указывать на то, какую модель деформации следует применять (например, положение пациента на животе в положение на спине). В некоторых вариантах осуществления тип модели деформации может быть предоставлен врачом посредством пользовательского устройства ввода. В других вариантах осуществления тип модели деформации может быть определен на основе полученной информации, сохраненной вместе с принятыми изображениями. Хотя шаги 604, 606 и 608 показаны последовательно, они могут быть выполнены в другом порядке или одновременно. Например, шаг 608 может быть выполнен до шага 604.
[063] На шаге 610 к принятым изображениям может быть применена модель деформации тканей для определения прогнозируемых местоположений поражений. Модель деформации ткани может представлять собой модель деформации груди в некоторых вариантах осуществления. Модели деформации, которые могут быть использованы, включают в себя, но не ограничиваются этим, примеры, приведенные на фиг. 1 (например, заявка на патент США 13/666600 и 14/000068). Прогнозируемые местоположения поражений, определяемые моделью деформации, могут соответствовать местоположениям поражений во время ультразвукового исследования. На шаге 612 прогнозируемые местоположения поражений могут быть предоставлены интерфейсу определения местоположения поражения, памяти, дисплею, графическому процессору, процессору изображения и/или их комбинации. На шаге 614 может быть предоставлено предлагаемое местоположение ультразвукового зонда и/или угол. Предлагаемое местоположение и/или угол могут быть основаны, по меньшей мере частично, на прогнозируемых местоположениях поражений. В некоторых вариантах осуществления шаг 614 может быть пропущен.
[064] Опционально, на шаге 616 может быть принято фактическое местоположение поражения. Фактическое местоположение поражения может быть введено врачом на основании ультразвукового изображения, полученного с помощью системы ультразвуковой визуализации. На шаге 618 модель деформации, примененная на шаге 610, может быть изменена, по меньшей мере частично, на основе фактического местоположения поражения. Изменение модели деформации, основанной на фактическом местоположении поражения, может повысить точность модели деформации. В некоторых вариантах осуществления модель деформации может быть изменена только в том случае, если фактическое местоположение поражения находится за пределами прогнозируемого местоположения и/или превышает пороговое расстояние от прогнозируемого местоположения поражения (например, более 100 мм, более 500 мм, более 1 см). Пороговое расстояние может быть установлено с помощью модели деформации и/или врачом. После шага 618 модель деформации может быть повторно применена к существующим данным и/или модель деформации может быть изменена для будущих ультразвуковых исследований.
[065] На фиг. 7 показана блок-схема процесса 700 для обеспечения визуальных указаний местоположений поражения в системе ультразвуковой визуализации в соответствии с принципами настоящего раскрытия. В некоторых вариантах осуществления процесс 700 может быть выполнен по меньшей мере частично с помощью интерфейса определения местоположения поражения (например, с помощью интерфейса определения местоположения поражения 224). На шаге 702 может быть отображено ранее полученное изображение. Отображение ранее полученного изображения может позволить врачу отметить на этом изображении местоположения поражений и/или другую информацию. В некоторых вариантах осуществления ранее полученное изображение уже включает в себя метки поражений. Врач может выбрать не отображать ранее полученное изображение. На шаге 704 могут быть приняты прогнозируемые местоположения поражений. Прогнозируемые местоположения поражений могут быть приняты от процессора, выполненного с возможностью выполнения модели деформации тканей в некоторых вариантах осуществления. На шаге 706 может быть обеспечено визуальное указание прогнозируемого местоположения поражения. Например, прогнозируемое местоположение поражения может быть представлено в виде кругового или эллипсоидального графического элемента на схематичном изображении тела, как показано на фиг. 2-4. На шаге 708 может быть обеспечено визуальное указание предлагаемого местоположения ультразвукового зонда и/или угла. Например, предлагаемое местоположение и/или угол могут быть представлены в виде линии на схематичном изображении тела, как показано на фиг. 2-4. В некоторых вариантах осуществления шаг 708 может быть пропущен.
[066] На шаге 710 может быть отображено изображение в реальном времени. Изображение в реальном времени может быть получено с помощью ультразвукового зонда системы ультразвуковой визуализации. Хотя шаг 710 показан после шагов 702-708, шаг 710 может быть выполнен до шагов 702-708 и/или одновременно с ними. На шаге 712 может быть обеспечено визуальное указание текущего местоположения зонда и/или угла. Например, текущее местоположение и/или угол могут быть представлены в виде комментария (отметки) на схематичном изображении тела, как показано на фиг. 2-4. Хотя шаг 712 показан после шагов 702-710, шаг 712 может быть выполнен до шагов 702-710 и/или одновременно с ними.
[067] На шаге 714 может быть принято фактическое местоположение поражения. Фактическое местоположение поражения может быть принято посредством пользовательского устройства ввода (например, клавиатуры, сенсорного экрана). Фактическое местоположение поражения может быть связано с ультразвуковым изображением и/или кадром кинопетли. Фактическое местоположение поражения и/или изображение могут быть сохранены в памяти системы ультразвуковой визуализации в некоторых вариантах осуществления. На шаге 716 может быть обеспечено визуальное указание фактического местоположения поражения. Например, фактическое местоположение поражения может быть представлено в виде комментария (отметки) на схематичном изображении тела, как показано на фиг. 4.
[068] Как описано в настоящем документе, поражения, обнаруженные на изображениях, полученных с помощью другого метода визуализации (например, магнитно-резонансной томографии, рентгеновской визуализации), могут быть обнаружены быстрее и/или точнее путем применения модели деформации тканей к изображениям и местоположениям поражений, полученных с помощью другого метода визуализации, и предоставления врачу визуальных указаний прогнозируемых местоположений поражений во время ультразвукового исследования.
[069] В связи с этим раскрытием следует отметить, что различные описанные в данном документе способы и устройства могут быть реализованы в аппаратном, программном и встроенном программно-аппаратном обеспечении. Кроме того, различные способы и параметры включены только в качестве примера и не имеют никакого ограничивающего смысла. В связи с этим раскрытием специалисты в данной области техники могут реализовать настоящие идеи при определении своих собственных методик и необходимого оборудования для воздействия на эти методики, оставаясь при этом в рамках раскрытия. Функциональные возможности одного или нескольких процессоров, описанных в настоящем документе, могут быть включены в меньшее число или в один процессор (например, центральный процессор) и могут быть реализованы с использованием интегральных схем специального назначения (ASIC) или схем обработки общего назначения, которые запрограммированы в соответствии с исполняемой инструкцией для выполнения описанных в настоящем документе функций.
[070] Хотя настоящая система была описана со ссылкой на систему МРТ и систему ультразвуковой визуализации, настоящая система может быть расширена на другие методики визуализации. Кроме того, настоящая система может также включать в себя один или несколько элементов, которые могут быть использованы с системами неультразвуковой визуализации с компонентами или без компонентов визуализации в реальном времени, так что они могут обеспечить особенности и преимущества настоящей системы.
[071] Следует понимать, что любой из примеров, вариантов осуществления или процессов, описанных в данном документе, может быть объединен с одним или несколькими другими примерами, вариантами осуществления и/или процессами или может быть разделен и/или выполнен между отдельными устройствами или частями устройств в соответствии с настоящими системами, устройствами и способами. Наконец, приведенное выше описание предназначено лишь для иллюстрации настоящей системы и не должно толковаться как ограничивающее прилагаемую формулу изобретения каким-либо конкретным вариантом осуществления или группой вариантов осуществления. Таким образом, хотя настоящая система была подробно описана со ссылкой на примерные варианты осуществления, следует также понимать, что специалисты в данной области техники могут разработать многочисленные изменения и альтернативные варианты осуществления, не отступая от более широкого и предполагаемого духа и объема настоящей системы, как это указано в приведенной ниже формуле изобретения. Соответственно, описание и чертежи должны рассматриваться как иллюстративные и не должны рассматриваться как ограничивающие объем формулы изобретения.
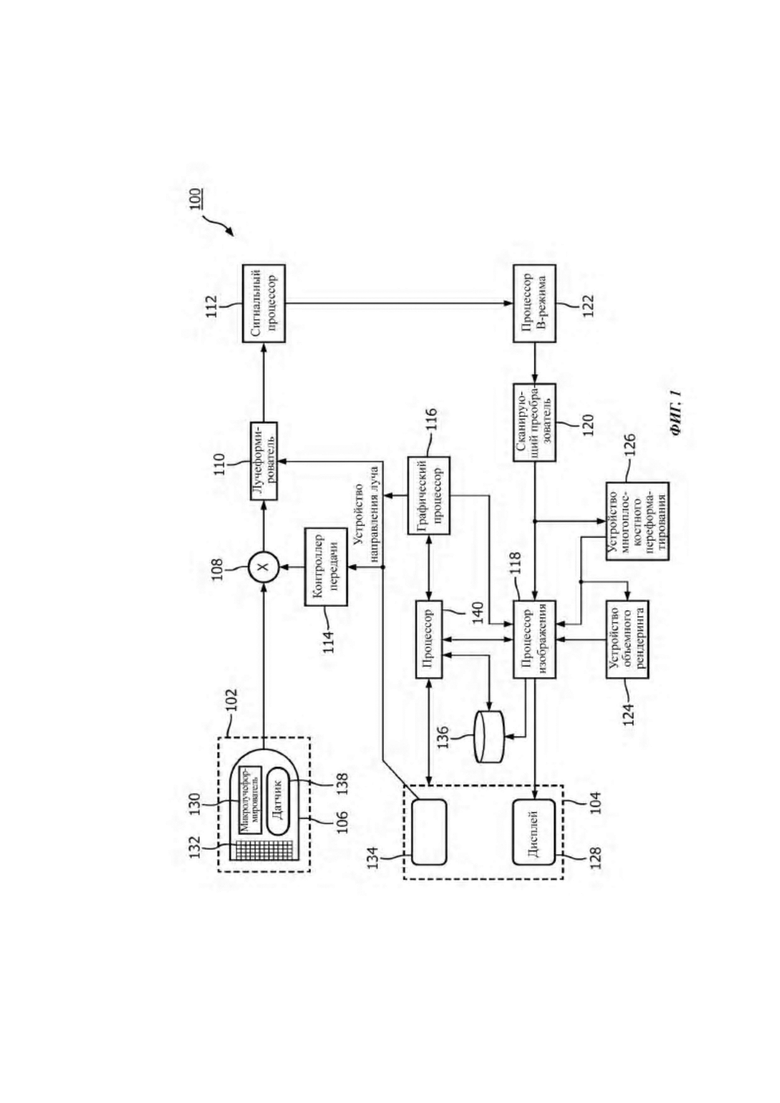
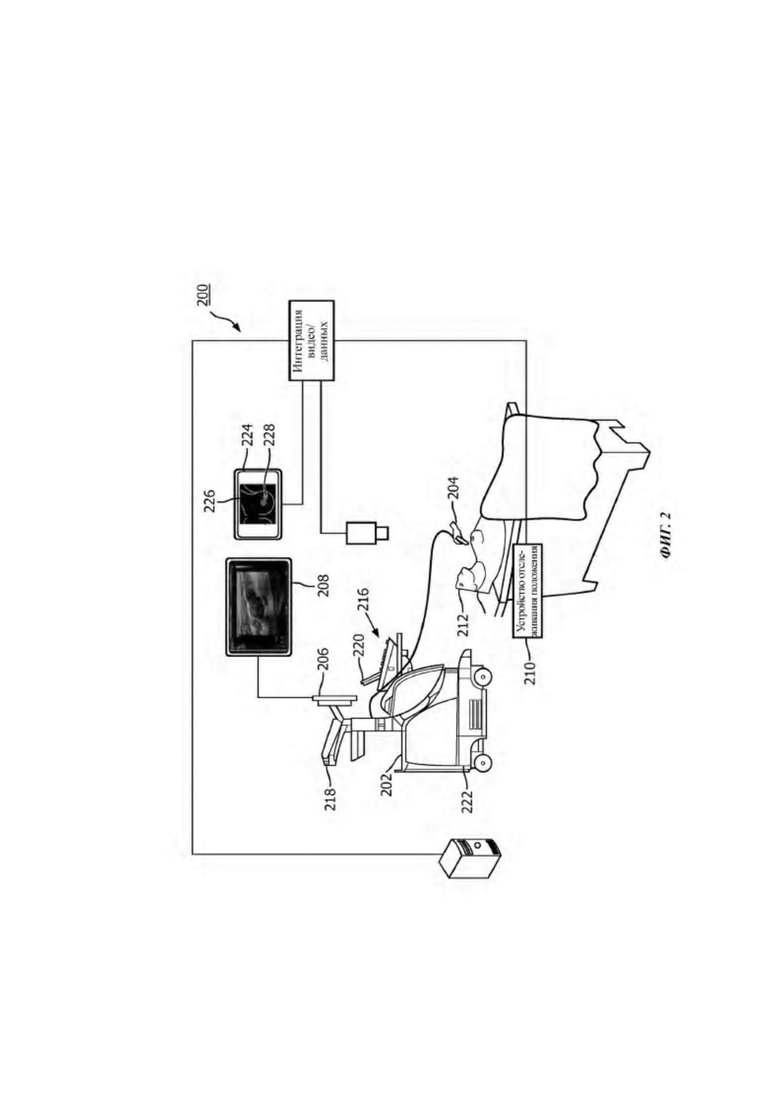

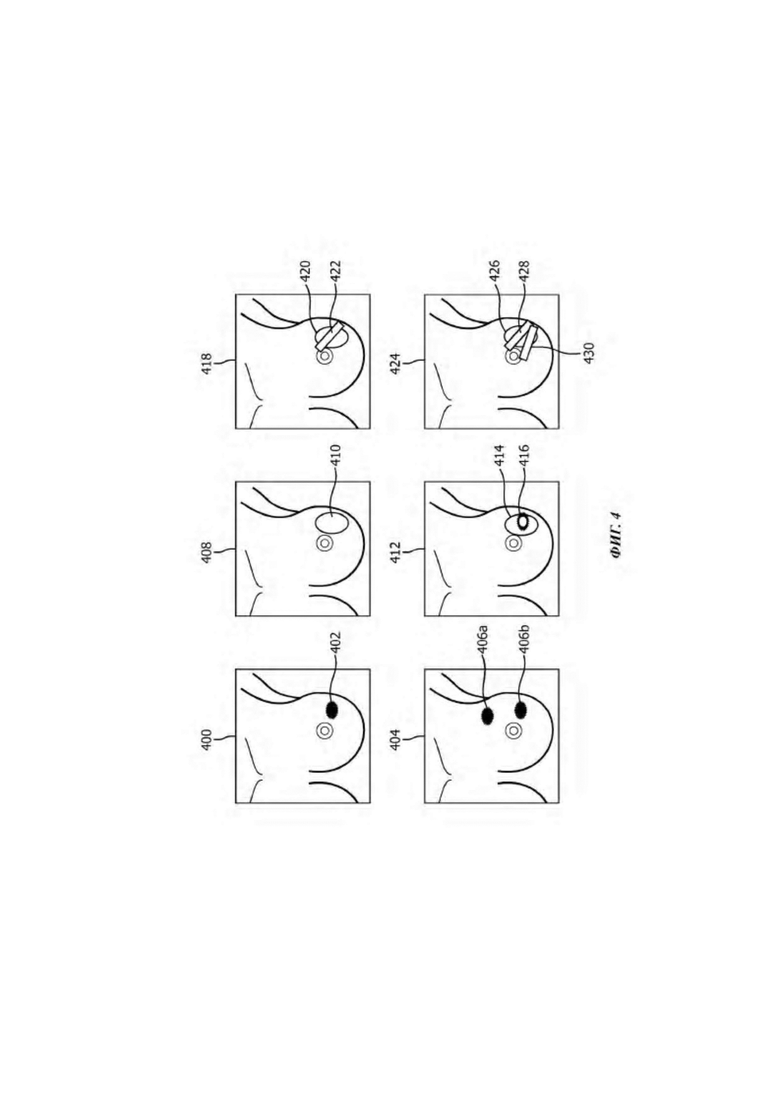
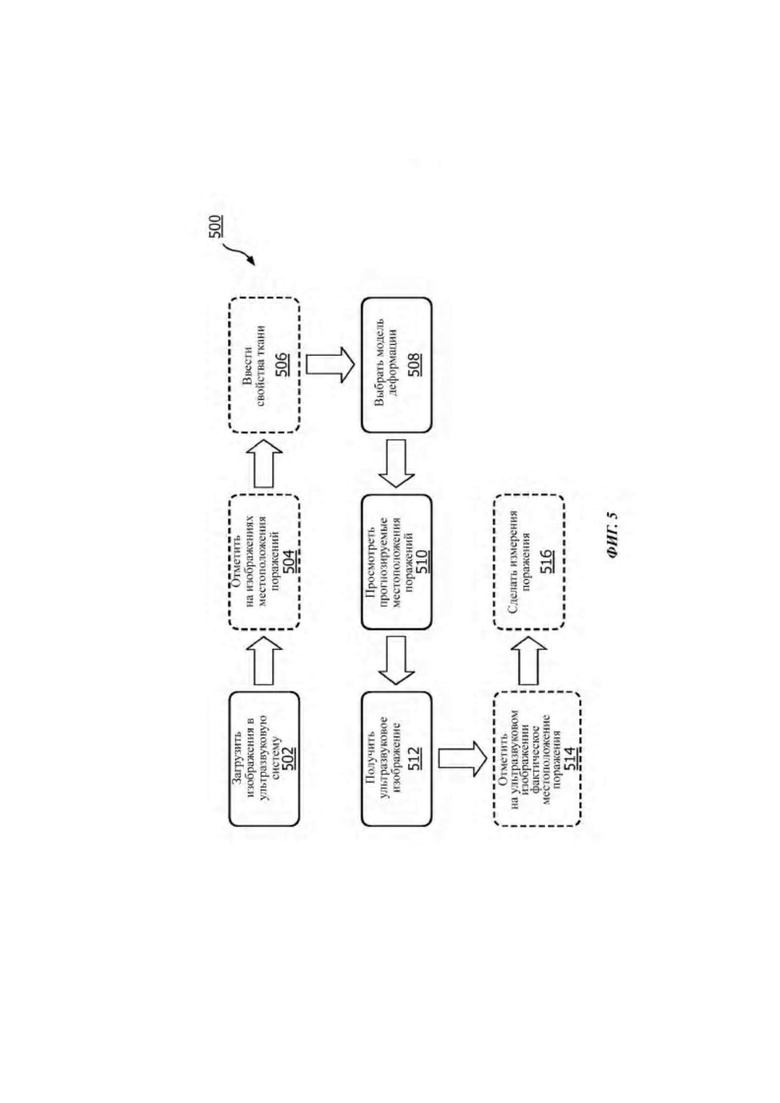
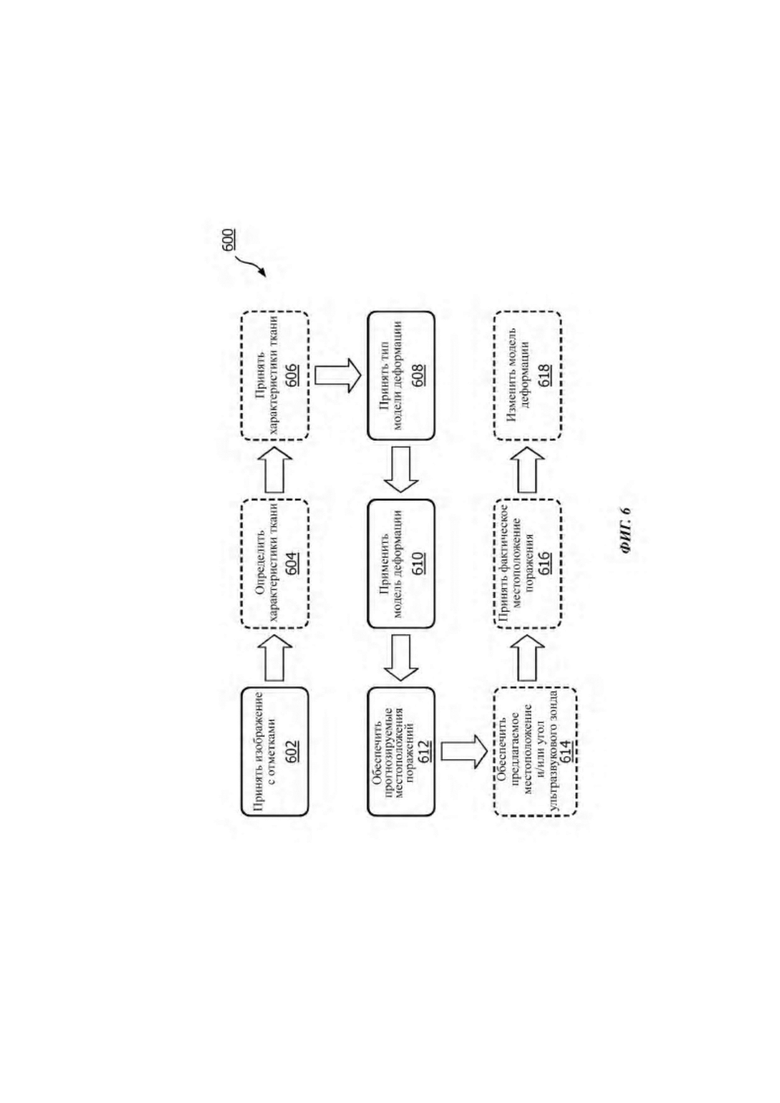
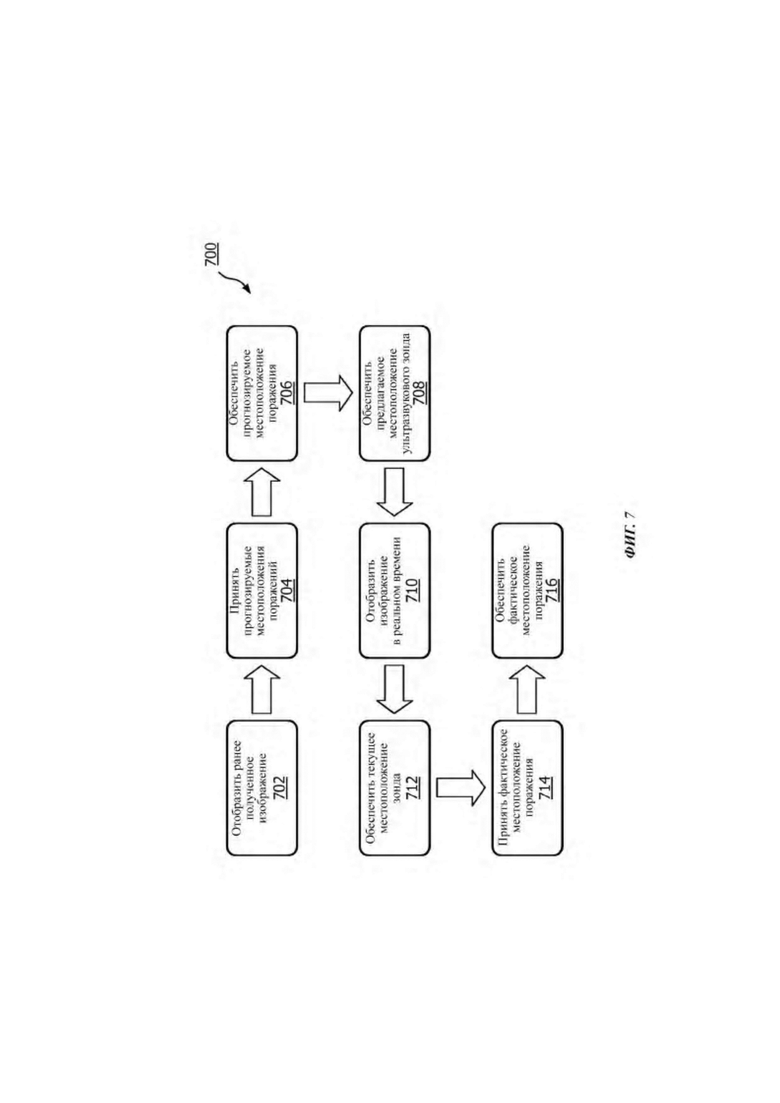
Настоящее изобретение раскрывает системы и способы ультразвуковой визуализации, которые могут быть использованы для помощи врачам в определении местоположений поражений во время ультразвукового исследования, которые ранее были обнаружены по изображениям, полученным другой системой визуализации, например системой магнитно-резонансной томографии. Предложен способ корреляции изображений из двух или более различных медицинских систем визуализации, включающий в себя: прием данных визуализации, полученных с помощью визуализации ткани с использованием первого метода визуализации; прием указания предполагаемого местоположения поражения внутри визуализированной ткани по отношению к принятым данным визуализации; выбор модели деформации на основе принятых данных визуализации; применение выбранной модели деформации к предполагаемому местоположению поражения для генерирования прогнозируемого местоположения поражения во время визуализации ткани с использованием второго метода визуализации, причем модель деформации учитывает разницу в деформации ткани между первым методом визуализации и вторым методом визуализации, причем второй метод визуализации представляет собой ультразвуковой метод, причем обеспечивается визуальное указание по меньшей мере одного из предлагаемых положений ультразвукового зонда для визуализации поражения; обеспечение визуального указания прогнозируемого местоположения для направления сбора данных изображения с использованием второго метода визуализации; ввод параметров фактического местоположения поражения; изменение модели деформации на основе фактического местоположении поражения в случае, если фактическое местоположение поражения находится за пределами прогнозируемого местоположения и/или превышает пороговое расстояние от прогнозируемого местоположения поражения. Группа изобретений обеспечивает возможность улучшить корреляцию между ультразвуковыми изображениями груди и изображениями груди, полученными другими методами. 3 н. и 11 з.п. ф-лы, 7 ил.
1. Система корреляции изображений из двух или более различных медицинских систем визуализации, содержащая:
пользовательский интерфейс (104), содержащий дисплей (128) и пользовательское устройство (134) ввода;
память (136), функционально соединенную с пользовательским интерфейсом; и
процессор (140), функционально соединенный с пользовательским интерфейсом и памятью;
причем память содержит исполняемые процессором инструкции, которые могут быть исполнены процессором для того, чтобы:
принять данные визуализации, полученные с помощью визуализации ткани с использованием первого метода визуализации;
принять в пользовательском интерфейсе указание предполагаемого местоположения поражения внутри визуализированной ткани по отношению к принятым данным визуализации;
выбрать модель деформации на основании принятых данных визуализации;
применить выбранную модель деформации к предполагаемому местоположению поражения для генерирования прогнозируемого местоположения поражения во время визуализации ткани с использованием второго метода визуализации, причем модель деформации учитывает разницу в деформации ткани между первым методом визуализации и вторым методом визуализации,
второй метод визуализации представляет собой ультразвуковой метод, причем исполняемые процессором инструкции дополнительно выполнены с возможностью побуждения пользовательского интерфейса (104) обеспечить визуальное указание по меньшей мере одного из предлагаемых положений ультразвукового зонда для визуализации поражения;
обеспечить в пользовательском интерфейсе визуальное указание прогнозируемого местоположения поражения для направления сбора данных изображения с использованием второго метода визуализации; ввести параметры фактического местоположения поражения; изменить модель деформации на основе фактического местоположении поражения в случае, если фактическое местоположение поражения находится за пределами прогнозируемого местоположения и/или превышает пороговое расстояние от прогнозируемого местоположения поражения.
2. Система (100) по п. 1, в которой исполняемые процессором инструкции дополнительно выполнены с возможностью побуждения пользовательского интерфейса (104) принять фактическое местоположение поражения от пользовательского устройства (134) ввода и обеспечить визуальное указание фактического местоположения поражения.
3. Система (100) по п. 1, в которой второй метод визуализации представляет собой ультразвуковой метод, причем исполняемые процессором инструкции дополнительно выполнены с возможностью побуждения пользовательского интерфейса (104) обеспечить визуальное указание по меньшей мере одного из текущего местоположения и угла ультразвукового зонда по отношению к анатомическому ориентиру.
4. Система (100) по п. 1, в которой исполняемые процессором инструкции дополнительно выполнены с возможностью побуждения пользовательского интерфейса (104) отобразить изображение, сгенерированное на основе принятых данных визуализации.
5. Система (100) по п. 4, в которой принятые данные визуализации включают в себя данные визуализации, полученные с помощью системы магнитно-резонансной томографии.
6. Система (100) по п. 1, в которой визуальное указание прогнозируемого местоположения поражения представляет собой графический элемент, наложенный на схематичное изображение тела.
7. Система (100) по любому из предшествующих пунктов, в которой данные визуализации сохранены в памяти (136).
8. Способ корреляции изображений из двух или более различных медицинских систем визуализации, включающий в себя:
прием (602) данных визуализации, полученных с помощью визуализации ткани с использованием первого метода визуализации; прием указания предполагаемого местоположения поражения внутри визуализированной ткани по отношению к принятым данным визуализации; выбор модели деформации на основе принятых данных визуализации; применение (610) выбранной модели деформации к предполагаемому местоположению поражения для генерирования прогнозируемого местоположения поражения во время визуализации ткани с использованием второго метода визуализации, причем модель деформации учитывает разницу в деформации ткани между первым методом визуализации и вторым методом визуализации, причем
второй метод визуализации представляет собой ультразвуковой метод, причем обеспечивается визуальное указание по меньшей мере одного из предлагаемых положений ультразвукового зонда для визуализации поражения;
обеспечение (612) визуального указания прогнозируемого местоположения для направления сбора данных изображения с использованием второго метода визуализации;
ввод параметров фактического местоположения поражения; изменение модели деформации на основе фактического местоположении поражения в случае, если фактическое местоположение поражения находится за пределами прогнозируемого местоположения и/или превышает пороговое расстояние от прогнозируемого местоположения поражения.
9. Способ (600) по п. 8, дополнительно включающий в себя анализ (604) принятых данных визуализации для определения характеристики ткани или прием характеристики ткани от пользовательского устройства ввода.
10. Способ (600) по п. 8, в котором второй метод визуализации представляет собой ультразвуковой метод, причем способ дополнительно включает в себя прием указания обновленного местоположения поражения в ответ на комментарий в реальном времени на ультразвуковом изображении.
11. Способ (600) по п. 10, дополнительно включающий в себя изменение (618) модели деформации, основанной по меньшей мере частично на фактическом местоположении поражения.
12. Способ (600) по п. 8, в котором модель деформации выполнена с возможностью аппроксимации смещения ткани груди, визуализированной в положении на животе, к ткани груди, визуализируемой в положении на спине.
13. Долговременный машиночитаемый носитель для корреляции изображений из двух или более различных медицинских систем визуализации, содержащий исполняемые процессором инструкции для прогнозирования местоположений поражения в системе, которые при исполнении побуждают систему:
принять данные визуализации, полученные с помощью визуализации ткани с использованием первого метода визуализации;
принять указание предполагаемого местоположения поражения внутри визуализированной ткани по отношению к принятым данным визуализации; выбрать модель деформации на основе принятых данных визуализации; применить выбранную модель деформации к предполагаемому местоположению поражения для генерирования прогнозируемого местоположения поражения во время визуализации ткани с использованием второго метода визуализации, причем модель деформации учитывает разницу в деформации ткани между первым методом визуализации и вторым методом визуализации; причем
второй метод визуализации представляет собой ультразвуковой метод, причем обеспечивается визуальное указание по меньшей мере одного из предлагаемых положений ультразвукового зонда для визуализации поражения;
обеспечить визуальное указание прогнозируемого местоположения поражения для направления сбора данных изображения с использованием второго метода визуализации,
ввести параметры фактического местоположения поражения;
изменить модель деформации на основе фактического местоположении поражения в случае, если фактическое местоположение поражения находится за пределами прогнозируемого местоположения и/или превышает пороговое расстояние от прогнозируемого местоположения поражения.
14. Долговременный машиночитаемый носитель, содержащий исполняемые процессором инструкции по п. 13, в котором второй метод визуализации представляет собой ультразвуковой метод, и который при исполнении инструкций дополнительно побуждает систему получить ультразвуковое изображение в реальном времени и отобразить ультразвуковое изображение в реальном времени.
| US 2006251301 A1, 09.11.2006 | |||
| US 2015150531 A1, 06.2015 | |||
| US 2014343420 A1, 20.11.2014 | |||
| EP 2878266 A1, 03.06.2015. |

