Область техники, к которой относится изобретение
Изобретение относится к высокоинтенсивному фокусированному ультразвуку с магнитно-резонансным контролем, в частности к уменьшению поглощения энергии ультразвука в совпадающих областях ближнего поля для множества точек воздействия ультразвуком.
Уровень техники
Ультразвук от сфокусированного ультразвукового преобразователя может быть использован для выборочной обработки областей внутри тела. Ультразвуковые волны распространяются как механические колебания высокой энергии. Эти колебания вызывают нагрев ткани по мере поглощения и они также могут приводить к кавитации. И нагревание ткани и кавитация могут быть использованы для разрушения ткани в клинических условиях. Однако нагревание ткани ультразвуком легче контролировать, нежели кавитацию. Ультразвуковая обработка может использоваться для абляции ткани и выборочного удаления областей раковых клеток. Эта методика применялась при лечении фибром матки и снизила необходимость в процедурах гистерэктомии.
При выборочной обработке ткани фокусированный ультразвуковой преобразователь может быть использован для фокусировки ультразвука на конкретную область обработки или на целевой объем. Преобразователь обычно устанавливается внутри среды, такой как дегазированная вода, которая может передавать ультразвук. Затем для регулировки положения ультразвукового преобразователя и тем самым для выбора области обрабатываемой ткани используются исполнительные элементы.
Фокусированные ультразвуковые преобразователи также обычно имеют множество элементов преобразователя, причем амплитуда и/или фаза элементов преобразователя контролируется. В частности, фаза отдельного элемента или групп элементов преобразователя часто контролируется для управления местоположением фокуса ультразвука. Это допускает быструю регулировку местоположения фокуса и последовательное воздействие ультразвуком на различные точки или местоположения воздействия ультразвуком. Ткань пациента между преобразователем и точкой воздействия ультразвуком обычно называется областью ближнего поля. Ультразвук распространяется через область ближнего поля к объему воздействия ультразвуком. Эта промежуточная ткань также нагревается, хотя и в той же степени, что и объем воздействия ультразвуком. При воздействии ультразвуком на множество точек воздействия ультразвуком область ближнего поля различных точек воздействия ультразвуком может совпадать. Поскольку конкретный участок области ближнего поля может совпадать, он может быть нагрет многократно. Чтобы избежать перегрева этой совпадающей области ближнего поля, могут быть необходимы задержки между воздействиями ультразвуком на множество точек воздействия ультразвуком.
Раскрытие изобретения
Изобретение обеспечивает медицинское устройство, компьютерный программный продукт и способ. Варианты выполнения приведены в зависимых пунктах формулы.
Как должно быть ясно специалистам в данной области техники, объекты настоящего изобретения могут быть реализованы в виде устройства, способа или компьютерного программного продукта. Соответственно объекты настоящего изобретения могут принимать форму полностью аппаратного варианта выполнения, полностью программного варианта выполнения (включая встроенное программное обеспечение, резидентное программное обеспечение, микропрограммное обеспечение и т.д.) или варианта выполнения, объединяющего объекты программного обеспечения и оборудования, которые могут в общем называться здесь «схемой», «модулем» или «системой». Кроме того, объекты настоящего изобретения могут принять форму компьютерного программного продукта, реализованного в одном или более машиночитаемых носителях, содержащих машиноисполняемый код.
Может быть использовано любое сочетание одного или более машиночитаемых носителей. Машиночитаемый носитель может быть машиночитаемой средой передачи сигнала или машиночитаемым носителем данных. «Машиночитаемый носитель данных» в данном случае означает любой материальный носитель данных, который может хранить команды, выполняемые процессором вычислительного устройства. Машиночитаемый носитель данных может обозначаться как энергонезависимый машиночитаемый носитель данных. Машиночитаемый носитель данных может также называться материальным машиночитаемым носителем. В некоторых вариантах выполнения машиночитаемый носитель данных также может иметь возможность хранения данных, к которым может обращаться процессор вычислительного устройства. Примеры машиночитаемых носителей данных включают в себя, не ограничиваясь: гибкий диск, магнитный жесткий диск, полупроводниковый жесткий диск, флэш-память, USB флэш-память, устройства оперативной памяти (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и файл регистра процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и цифровые универсальные диски (DVD), например CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW, или диски DVD-R. Термин «машиночитаемый носитель данных» также относится к различным носителям записи, к которым может обращаться компьютерное устройство через сеть или через канал связи. Например, данные могут быть найдены с помощью модема по Интернету или по локальной сети. Машиноисполняемый код, реализованный на машиночитаемом носителе, может быть передан с использованием любой соответствующей среды, включая, но без ограничения, среды беспроводной связи, проводной связи, оптический волоконный кабель, радиочастотную связь и т.д. или любое подходящее сочетание вышеназванного.
Машиночитаемая среда передачи сигнала может включать в себя передаваемый сигнал данных с находящимся в нем машиноисполняемым кодом, например в полосе основных немодулированных частот или как часть несущей. Такой распространяющийся сигнал может иметь любую форму, включая в себя, но без ограничений, электромагнитный, оптический или любое подходящее их сочетание. Машиночитаемая среда передачи сигнала может быть любой машиночитаемой средой, которая не является машиночитаемым носителем данных, и которая может передать, распространить, или транспортировать программу для использования, сама или в соединении с системой выполнения команд, устройством или устройством.
«Память компьютера» или «память» - это пример машиночитаемого носителя данных. Память компьютера - это любая память, которая является непосредственно доступной для процессора. «Компьютерное запоминающее устройство» или «запоминающее устройство» - это другой пример машиночитаемого носителя данных. Компьютерное запоминающее устройство - это любой энергонезависимый машиночитаемый носитель данных. В некоторых вариантах выполнения компьютерное запоминающее устройство также может быть памятью компьютера или наоборот.
«Процессор» в данном случае означает электронный компонент, который имеет возможность выполнять программу или машиноисполняемую команду. Указания на вычислительное устройство, содержащее «процессор», должны интерпретироваться как возможно содержащий более одного процессора или обрабатывающего ядра. Процессор может быть, например, многоядерным процессором. Процессор может также относиться к набору процессоров в пределах отдельной компьютерной системы или распределенному по множеству компьютерных систем. Термин «вычислительное устройство» должен также интерпретироваться как возможно относящийся к набору или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Машиноисполняемый код может выполняться множеством процессоров, которые могут находиться в одном и том же вычислительном устройстве или даже могут быть распределены по множеству вычислительных устройств.
Машиноисполняемый код может содержать машиноисполняемые команды или программу, которая побуждает процессор выполнять объект настоящего изобретения. Машиноисполняемый код для выполнения операций для объектов настоящего изобретения может быть написан на любом сочетании одного или более языков программирования, включая объектно-ориентированные языки программирования, такие как Java, Smalltalk, C++ или подобные, и обычные процедурные языки программирования, такие как язык программирования «C», или подобные языки программирования и компилированные машиноисполняемые команды. В некоторых случаях машиноисполняемый код может быть в форме языка высокого уровня или в предварительно компилированной форме и использоваться вместе с интерпретатором, который по ходу работы формирует машиноисполняемые команды.
Машиноисполняемый код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программ, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последней ситуации удаленный компьютер может быть соединен с компьютером пользователя через сеть любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или может быть выполнено соединение с внешним компьютером (например, через Интернет, используя провайдер услуг интернета).
Объекты настоящего изобретения описаны с обращением к иллюстрациям в виде блок-схем способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами выполнения изобретения. Следует понимать, что каждый блок или часть блоков блок-схемы, иллюстраций и/или блок-схем могут быть реализованы командами компьютерной программы в форме машиноисполняемого кода, когда это применимо. Кроме того, следует понимать, что если нет взаимного исключения, сочетания блоков в различных блок-схемах, иллюстрации и/или блок-схемы могут быть объединены. Эти команды компьютерной программы могут быть переданы на процессор общего компьютера, специализированного компьютера или другого программируемого устройства обработки данных, чтобы сформировать такой механизм, когда команды, которые выполняются процессором компьютера, или другим программируемым устройством обработки данных, формируют средство для осуществления функций/действий, определенных в блок-схеме и/или блоке или блоках блок-схемы.
Эти команды компьютерной программы также могут быть сохранены на машиночитаемом носителе, которая может побуждать компьютер, другое программируемое устройство обработки данных или другие устройства функционировать определенным образом, таким образом, чтобы команды, сохраняемые на машиночитаемом носителе, производили готовое изделие, включая команды, которые осуществляют функцию/действие, определенную в блок-схеме и/или в блоке или блоках блок-схемы.
Команды компьютерной программы также могут быть загружены на компьютер, другое программируемое устройство обработки данных или другие устройства для инициирования последовательности операционных этапов, выполняемых на компьютере, другом программируемом устройстве или других устройствах для осуществления выполняемого компьютером процесса таким образом, чтобы команды, которые выполняются на компьютере или другом программируемом устройстве, обеспечивали процессы для осуществления функций/действий, определенных в блоке блок-схемы и/или в блоке или блоках блок-схемы.
«Пользовательский интерфейс» - в данном случае это интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» может также обозначаться как «человеко-машинный интерфейс». Пользовательский интерфейс может обеспечивать информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может давать возможность ввода данных от оператора, принимаемых компьютером, и может обеспечить вывод данных пользователю от компьютера. Иначе говоря, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и интерфейс может позволить компьютеру указывать эффекты от управления или манипуляции оператором. Визуализация данных или информации на дисплее или графическом пользовательском интерфейсе - это пример выдачи информации оператору. Прием данных через клавиатуру, мышь, шаровой манипулятор, сенсорную панель, ручку-указатель, графический планшет, джойстик, игровой пульт, веб-камеру, гарнитуру, рычаги переключения передач, руль, педали, проводную перчатку, танцевальный коврик, дистанционное управление и акселерометр - это все примеры компонентов пользовательского интерфейса, которые допускают прием информации или данных от оператора.
«Интерфейс аппаратных средств» в данном случае означает интерфейс, который позволяет процессору компьютерной системы взаимодействовать и/или управлять внешним вычислительным устройством. Интерфейс аппаратных средств может позволить процессору посылать сигналы управления или команды на внешнее вычислительное устройство. Интерфейс аппаратных средств может также позволить процессору обмениваться данными с внешним вычислительным устройством. Примеры интерфейса аппаратных средств включают в себя, не ограничиваясь: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS 232, порт IEEE 488, соединение Bluetooth, соединение беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, интерфейс MIDI, аналоговый входной интерфейс и цифровой входной интерфейс.
«Дисплей» или «устройство отображения» в данном случае означает устройство вывода данных или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, звуковые и/или тактильные данные. Примеры дисплея включают в себя, не ограничиваясь: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брейля, электронно-лучевую трубку (CRT), электронно-лучевую запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, индикаторную панель, вакуумный флуоресцентный дисплей (VF), дисплеи на светоизлучающих диодах (LED), электролюминесцентный дисплей (ELD), плазменные панели отображения (PDP), жидкокристаллические дисплеи (LCD), дисплеи на органических светоизлучающих диодах (OLED), проектор и дисплей, устанавливаемый на голове.
«Ультразвуковое окно» в данном случае означает окно, которое пригодно для передачи ультразвуковых волн или энергии. Обычно тонкая пленка или мембрана используются как ультразвуковое окно. Ультразвуковое окно может, например, быть выполнено из тонкой мембраны BoPET (биаксиально-ориентированный терефталат полиэтилена).
В одном объекте изобретение обеспечивает медицинское устройство, содержащее систему высокоинтенсивного фокусированного ультразвука. Система высокоинтенсивного фокусированного ультразвука содержит ультразвуковой преобразователь с множеством элементов преобразователя для фокусировки ультразвука в объем воздействия ультразвуком. Имеется область ближнего поля между ультразвуковым преобразователем и объемом воздействия ультразвуком. То есть ультразвуковой преобразователь при своем действии образует область ближнего поля, фокусируя ультразвук в объеме воздействия ультразвуком. Область ближнего поля в данном случае означает область, через которую ультразвук проходит при его распространении к объему воздействия ультразвуком, или к фокальной точке. Поскольку ультразвук также проходит через область ближнего поля, она нагревается, но не так, как это происходит в объеме воздействия ультразвуком. Множество элементов преобразователя управляются в группах. Элементы преобразователя могут быть управляемыми так, что фаза и/или амплитуда отдельных элементов преобразователя или группы элементов могут быть изменены. Например, фаза может быть использована для сдвига положения фокуса. Амплитуда отдельных элементов преобразователя или групп элементов преобразователя также может быть изменена. При этом отдельные элементы преобразователя или их группы также могут быть полностью выключены.
Медицинское устройство дополнительно содержит память для хранения машиноисполняемых команд. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством. Выполнение команд побуждает процессор принимать данные местоположения, относящиеся к множеству точек воздействия ультразвуком. Данные местоположения по существу представляют собой данные, которые описывают местоположение множества точек воздействия ультразвуком. Это точки, которые подвергаются действию ультразвука посредством перемещения объема воздействия ультразвуком в пределы точки воздействия ультразвуком. Данные местоположения могут быть приняты, например, из: плана лечения, медицинской системы визуализации, ручного ввода данных и сочетания этого.
Выполнение команд дополнительно побуждает процессор определять траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя. Траектория воздействия ультразвуком - это грубое приближение или приближение для траектории, которую выбирает ультразвук для попадания в каждую из множества точек воздействия ультразвуком. Траектория воздействия ультразвуком может быть сформирована с простой геометрической моделью для каждого из элементов преобразователя или групп элементов преобразователя, или может также использовать способ трассировки лучей.
Выполнение команд дополнительно побуждает процессор обнаруживать области совпадения, используя траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком. Области совпадения указывают на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля. Обычно ультразвуковой преобразователь имеет вогнутую форму, и элементы преобразователя ультразвука ориентированы таким образом, что они все фокусируются примерно в конкретный объем воздействия ультразвуком или фокальную точку. Область ближнего поля оказывается значительно большей, чем объем воздействия ультразвуком. Если объемы воздействия ультразвуком являются смежными друг с другом или находятся в пределах конкретных заданных частей расстояния, области ближнего поля могут совпадать. Как упомянуто выше, ультразвук, распространяющийся через область ближнего поля, вызывает нагревание областей ткани. Если области ближнего поля совпадают в точках воздействия ультразвуком, которые подвергаются действию ультразвука, то возможно, что некоторые области ближнего поля будут нагреваться неоднократно. Это может привести к нежелательному нагреванию области ближнего поля, что может оказаться опасным для пациента.
Выполнение команд дополнительно побуждает процессор определять команды управления преобразователем, используя области совпадения. Команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя, чтобы уменьшить поглощение энергии ультразвука в области совпадения в течение воздействия ультразвуком на две или более точек воздействия ультразвуком. Амплитуда и/или фаза ультразвукового сигнала, подаваемого на ультразвуковые преобразователи, достаточно просто изменяется так, что траектория, которую ультразвук имеет в области совпадения, уменьшается. Это может включать в себя отключение отдельных элементов преобразователя или группы элементов преобразователя, или это может означать снижение амплитуды во время воздействия ультразвуком на одну или более точек воздействия ультразвуком. Имеются различные варианты, с которыми это может быть оптимизировано.
Выполнение команд дополнительно приводит к тому, что система высокоинтенсивного фокусированного ультразвука последовательно воздействует ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем. Команды управления преобразователем приводят к тому, что система высокоинтенсивного фокусированного ультразвука последовательно воздействует ультразвуком на множество точек воздействия ультразвуком. Этот вариант выполнения может давать преимущество в ограничении тепловой дозы в ближнем поле. Это может обеспечивать преимущество в том, что ультразвуковой пучок, произведенный ультразвуковым преобразователем, имеет форму пучка. Это может означать, что для воздействия ультразвуком на множество точек воздействия ультразвуком требуется меньшее время ожидания, поскольку области совпадения не нагреваются или нагреваются меньше, чем если бы изобретение не применялось.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор принимать карту текущих тепловых свойств, описывающую тепловые свойства в области ближнего поля. Карта тепловых свойств может быть определена, либо используя методику медицинской визуализации, такую как тепловую магнитно-резонансную визуализацию, либо может быть сформирована моделью, которая использует данные от предыдущего воздействия ультразвуком, чтобы сформировать карту тепловых свойств. Выполнение команд дополнительно побуждает процессор вычислять карту прогнозируемых тепловых свойств для тепловых свойств, используя команды управления преобразователем и тепловую модель преобразователя. Тепловая модель преобразователя может, например, быть тепловой акустической моделью, которая используется для прогнозирования изменения температуры, вызванного воздействием ультразвуком на множество точек воздействия ультразвуком с командами управления преобразователем.
Выполнение команд дополнительно побуждает процессор определять скорректированные команды управления преобразователем, используя карту прогнозируемых тепловых свойств. Скорректированные команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя. Команды побуждают процессор использовать скорректированные команды управления преобразователем для управления системой высокоинтенсивного фокусированного ультразвука во время последовательного воздействия ультразвуком на множество точек воздействия ультразвуком. В этом варианте выполнения карта текущих тепловых свойств описывает текущие тепловые свойства области ближнего поля. Это используется для лучшего определения эффекта воздействия ультразвуком на множество точек воздействия ультразвуком. Например, если карта текущих тепловых свойств представляет собой карту температуры, то скорректированные команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя, чтобы ограничить температуру в области ближнего поля до заданного порога. Это может предотвратить нанесение вреда пациенту в области ближнего поля. Как карта текущих тепловых свойств, так и и карта прогнозируемых тепловых свойств являются трехмерными картами тепловых свойств пациента в области ближнего поля.
Альтернатива карте температуры карта тепловых свойств может также использоваться для минимизации температуры без порога, чтобы сделать время охлаждения короче. Также тепловая доза, вычисленная из температурных карт, или измеренная или прогнозируемая посредством моделирования, может быть использована как ограничивающая мера вместо температуры.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор принимать предыдущую тепловую дозу. Предыдущая тепловая доза описывает тепловые дозы, обусловленные предыдущим воздействием ультразвуком с использованием системы высокоинтенсивного фокусированного ультразвука. Карта текущих тепловых свойств и/или карта прогнозируемых тепловых свойств определяются по меньшей мере частично с использованием предыдущей тепловой дозы. Этот вариант выполнения может быть предпочтительным, поскольку это может быть полезным в прогнозировании будущего эффекта множества точек воздействия ультразвуком на некроз или повреждение ткани в пределах области ближнего поля.
Магнитно-резонансные (MR) данные определены здесь как зарегистрированные измерения радиочастотных сигналов, испускаемых атомными спинами, посредством антенны магнитно-резонансного устройства во время сканирования магнитно-резонансной визуализации. Изображение магнитно-резонансной визуализации (MRI) определено здесь как представляющее собой восстановленную двумерную или трехмерную визуализацию анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Эта визуализация может быть выполнена с использованием компьютера.
Данные MR термометрии определены здесь как зарегистрированные измерения радиочастотных сигналов, испускаемых атомными спинами, посредством антенны магнитно-резонансного устройства во время сканирования магнитно-резонансной визуализации, которые содержат информацию, которая может использоваться для магнитно-резонансной термометрии. Магнитно-резонансная термометрия функционирует путем измерения изменений параметров, чувствительных к температуре. Примеры параметров, которые могут быть измерены во время магнитно-резонансной термометрии: частотный сдвиг протонного резонанса, коэффициент диффузии или изменения времен релаксации Т1 и/или T2 могут быть использованы для измерения температуры с использованием магнитного резонанса. Частотный сдвиг протонного резонанса зависит от температуры, поскольку магнитное поле, которое прикладывается к отдельным протонам, атомам водорода, зависит от окружающей молекулярной структуры. Увеличение температуры уменьшает молекулярное экранирование вследствие влияния температуры на водородные связи. Это приводит к температурной зависимости частоты протонного резонанса.
Протонная плотность зависит линейно от равновесной намагниченности. Поэтому оказывается возможным определить изменения температуры, используя взвешенные изображения протонной плотности.
Время релаксации Т1, T2, и T2-звезда (иногда записываемое как T2*) также зависит от температуры. Поэтому реконструкция взвешенных изображений Т1, T2, и T2-звезда может использоваться для формирования тепловых или температурных карт.
Температура также влияет на броуновское движение молекул в водном растворе. Поэтому импульсные последовательности, которые пригодны для измерения коэффициентов диффузии, такие как импульсное диффузионное градиентное спиновое эхо, могут быть использованы для измерения температуры.
Один из самых полезных способов измерения температуры с использованием магнитного резонанса - это измерение сдвига частоты протонного резонанса (PRF) от водных протонов. Резонансная частота протонов зависит от температуры. Когда температура изменяется в элементе объема, сдвиг частоты приведет к изменению измеряемой фазы водных протонов. Поэтому может быть определено изменение температуры между двумя изображениями фазы. Этот способ определения температуры имеет преимущество в том, что он относительно быстрый по сравнению с другими способами. Способ PRF описан здесь более подробно, чем другие способы. Однако описанные здесь способы и методики также применимы к другим способам выполнения термометрии с магнитно-резонансной визуализацией.
В другом варианте выполнения медицинское устройство дополнительно содержит систему магнитно-резонансной визуализации для получения тепловых магнитно-резонансных данных. Выполнение команд дополнительно побуждает процессор получать тепловые магнитно-резонансные данные. Выполнение команд дополнительно побуждает процессор вычислять карту текущих тепловых свойств по меньшей мере частично с использованием тепловых магнитно-резонансных данных. Тепловые магнитно-резонансные данные могут быть получены во время или после предыдущего воздействия ультразвуком.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор вычислять карту текущих тепловых свойств, используя тепловую модель преобразователя и набор предыдущих команд управления преобразователем. Тепловая модель и магнитно-резонансная термометрия могут использоваться в сочетании с моделированием в некоторых вариантах выполнения.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор многократно принимать данные местоположения, описывающие множество точек воздействия ультразвуком. Выполнение команд дополнительно побуждает процессор многократно определять траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элементов преобразователя. Выполнение команд дополнительно побуждает процессор многократно обнаруживать области совпадения, используя траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком. Область совпадения указывает на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля. Выполнение команд дополнительно побуждает процессор многократно определять команды управления преобразователем, выполнены с возможностью управления множеством элементов преобразователя, чтобы уменьшить поглощение ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком. Выполнение команд дополнительно побуждает процессор многократно управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем. В сущности, в этом варианте выполнения действия, выполняемые процессором, выполняются многократно. Это может быть преимущественным, поскольку может иметь место множество групп точек воздействия ультразвуком, обрабатываемых при применении медицинского устройства на пациенте.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор многократно принимать карту текущих тепловых свойств. Выполнение команд дополнительно побуждает процессор многократно вычислять карту прогнозируемых тепловых свойств, используя команды управления преобразователем и тепловую модель преобразователя. Выполнение команд дополнительно побуждает процессор многократно определять скорректированные команды управления преобразователем, используя карту прогнозируемых тепловых свойств. Выполнение команд дополнительно побуждает процессор многократно управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
В другом варианте выполнения множество элементов преобразователя управляются для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком, используя любое из следующего: выборочное выключение первой части множества элементов преобразователя, выборочное уменьшение амплитуды ультразвуковой энергии, формируемой второй частью множества элементов преобразователя, и сочетание этого. Первая и вторая части множества элементов преобразователя могут быть одним или более отдельными элементами преобразователя, или они также могут быть группами элементов преобразователя.
В другом варианте выполнения каждый из множества элементов преобразователя управляется по отдельности.
В другом варианте выполнения тепловые свойства представляют собой любое из следующего: температура, максимальная температура, тепловая доза, время охлаждения и сочетания этого.
В другом объекте изобретение предусматривает компьютерный программный продукт, содержащий машиноисполняемые команды для выполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука, содержащую ультразвуковой преобразователь с множеством элементов преобразователя для фокусировки ультразвука в объем воздействия ультразвуком. Имеется область ближнего поля между ультразвуковым преобразователем и объемом воздействия ультразвуком. Множество элементов преобразователя управляются в группах. Выполнение команд побуждает процессор принимать данные местоположения, описывающие множество точек воздействия ультразвуком. Выполнение команд дополнительно побуждает процессор определять траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя. Выполнение команд дополнительно побуждает процессор обнаруживать область совпадения, используя траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком. Область совпадения указывает на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля.
Выполнение команд дополнительно побуждает процессор определять команды управления преобразователем, используя области совпадения. Команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком. Выполнение команд дополнительно побуждает процессор управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем. Выполнение команд дополнительно побуждает процессор принимать карту текущих тепловых свойств, описывающую тепловое свойство в области ближнего поля.
Выполнение команд дополнительно побуждает процессор вычислять назначенную карту тепловых свойств для теплового свойства, используя команды управления преобразователем и тепловую модель преобразователя. Выполнение команд дополнительно побуждает процессор определять скорректированные команды управления преобразователем, используя карту прогнозируемых тепловых свойств. Скорректированные команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя. Команды побуждают процессор использовать скорректированные команды управления преобразователем для управления системой высокоинтенсивного фокусированного ультразвука во время последовательного воздействия ультразвуком множества точек воздействия ультразвуком.
В другом варианте выполнения выполнение команд дополнительно побуждает процессор принимать предыдущую тепловую дозу. Предыдущая тепловая доза описывает тепловую дозу, обусловленную предыдущим воздействием ультразвуком с использованием высокоинтенсивной фокусированной ультразвуковой системы. Карта текущих тепловых свойств и/или карта прогнозируемых тепловых свойств по меньшей мере частично определяются с использованием предыдущей тепловой дозы.
В другом варианте выполнения медицинское устройство дополнительно содержит систему магнитно-резонансной визуализации для получения тепловых магнитно-резонансных данных. Выполнение команд дополнительно побуждает процессор получать тепловые магнитно-резонансные данные. Выполнение команд дополнительно побуждает процессор вычислять карту текущих тепловых свойств по меньшей мере частично с использованием тепловых магнитно-резонансных данных.
В другом варианте выполнения медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука, содержащую ультразвуковой преобразователь с множеством элементов преобразователя для фокусировки ультразвука в объем воздействия ультразвуком. Имеется область ближнего поля между ультразвуковым преобразователем и объемом воздействия ультразвуком. Множество элементов преобразователя управляются в группах. Способ содержит этап приема данных местоположения, описывающих множество точек воздействия ультразвуком. Способ дополнительно содержит этап определения траектории воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя.
Способ дополнительно содержит этап обнаружения области совпадения с использованием траектории воздействия ультразвуком для каждой из множества точек воздействия ультразвуком. Область совпадения указывает на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля. Способ дополнительно содержит этап определения команд управления преобразователем, используя области совпадения. Команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком. Способ дополнительно содержит этап управления системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
Следует понимать, что один или более из вышеупомянутых вариантов выполнения изобретения могут быть объединены, если только объединенные варианты выполнения не являются взаимоисключающими.
Краткое описание чертежей
Ниже исключительно в качестве примера описаны предпочтительные варианты выполнения изобретения и в связи с чертежами, на которых:
Фиг. 1 изображает блок-схему, которая иллюстрирует пример способа;
Фиг. 2 - пример медицинского устройства;
Фиг 3 - два вида ультразвукового преобразователя в первом положении и втором положении;
Фиг, 4 - дополнительный пример медицинского устройства; и
Фиг 5 - дополнительный пример медицинского устройства.
Осуществление изобретения
Подобным образом пронумерованные элементы на чертежах являются или эквивалентными элементами, или выполняют ту же самую функцию. Элементы, которые рассматривались ранее, не обязательно рассматриваются ниже на чертежах, если их функция является эквивалентной.
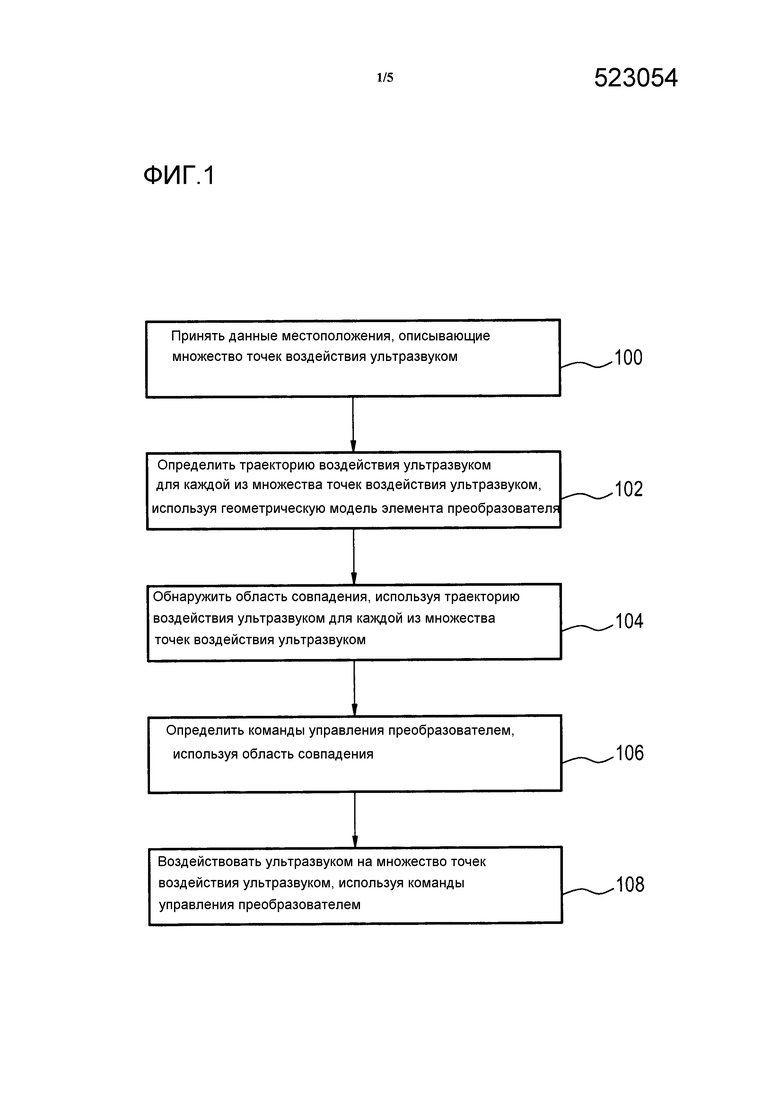
На Фиг. 1 показана блок-схема, которая иллюстрирует способ в соответствии с вариантом выполнения изобретения. На этапе 100 принимаются данные местоположения, описывающие множество точек воздействия ультразвуком. Затем на этапе 102 определяется траектория воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя. Затем на этапе 104 обнаруживают область совпадения, используя траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком. Область совпадения указывает на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля. В некоторых вариантах выполнения может обнаруживаться более одной области совпадения. Затем на этапе 106 определяются или формируются команды управления преобразователем, которые выполнены с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком. И, наконец, на этапе 108 система высокоинтенсивного фокусированного ультразвука управляется с использованием команд управления преобразователем для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком.
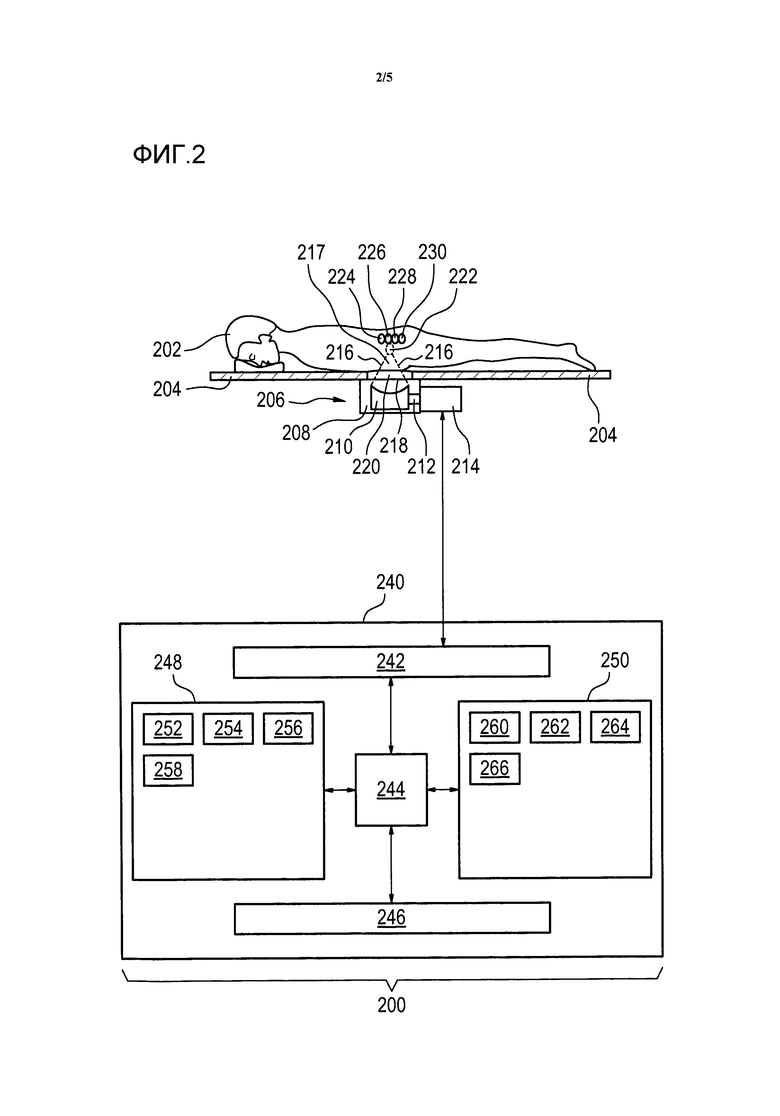
На Фиг. 2 показан пример медицинского устройства 200. Субъект 202 показан как лежащий на опоре 204 субъекта. Медицинское устройство 200 содержит систему 206 высокоинтенсивного фокусированного ультразвука. Система 206 высокоинтенсивного фокусированного ультразвука содержит заполненную текучей средой камеру 208. В пределах заполненной текучей средой камеры 208 имеется ультразвуковой преобразователь 210. Хотя и не показано на этом чертеже, ультразвуковой преобразователь 210 содержит множество элементов ультразвукового преобразователя, каждый из которых выполнен с возможностью формирования отдельного пучка ультразвука. Это может быть использовано для направления на местоположение объема 222 воздействия ультразвуком с помощью электроники, управляя фазой и/или амплитудой переменного электрического тока, подаваемого на каждый элемент, или на группы элементов ультразвукового преобразователя. Точка 222 представляет регулируемый фокус медицинского устройства 200.
Ультразвуковой преобразователь 210 соединен с механизмом 212, который позволяет механически изменять положение ультразвукового преобразователя 210. Механизм 212 соединен с механическим приводом 214, который приспособлен для приведения в действие механизма 212. Механический привод 212 также имеет блок электропитания для подачи электроэнергии на ультразвуковой преобразователь 210. В некоторых вариантах выполнения блок электропитания может управлять фазой и/или амплитудой электрического сигнала, подаваемого на отдельные элементы ультразвукового преобразователя.
Ультразвуковой преобразователь 210 формирует ультразвук, который показан как следующий по траектории 216. Ультразвук 216 проходит через заполненную флюидом камеру 208 и через ультразвуковое окно 218. В этом варианте выполнения ультразвук затем проходит через гелевую подушку 220. Гелевая подушка 220 не обязательно присутствует во всех вариантах выполнения, но в этом варианте выполнения имеется рецесс в столе 204 пациента для приема гелевой подушки 220. Гелевая подушка 220 способствует передаче ультразвуковой мощности между преобразователем 210 и пациентом 202. После прохождения через гелевую подушку 220 ультразвук 216 проходит через область 217 ближнего поля пациента 202 и затем фокусируется в объем 222 воздействия ультразвуком или целевую зону.
Объем 222 воздействия ультразвуком может перемещаться посредством сочетания механически позиционируемого ультразвукового преобразователя 210 и электронного регулирования положения объема 222 воздействия ультразвуком.
В пределах пациента 204 располагаются четыре точки 224, 226, 228, 230 воздействия ультразвуком, которые являются видимыми. Объем 222 воздействия ультразвуком может быть перемещен в каждую из точек 224, 226, 228, 230 воздействия ультразвуком посредством сочетания электронного или механического регулирования объема 222 воздействия ультразвуком. Линии 216 указывают приблизительную траекторию ультразвука от ультразвукового преобразователя 210 к объему 222 воздействия ультразвуком. Из этого чертежа очевидно, что если объем 222 воздействия ультразвуком перемещен в каждой из точек 224, 226, 228, 230 воздействия ультразвуком, то области для области 217 ближнего поля будут нагреваться неоднократно. Система 206 высокоинтенсивного фокусированного ультразвука показана как соединяемая с интерфейсом 242 аппаратных средств компьютерной системы 240.
Компьютер 240 дополнительно содержит процессор 244, пользовательский интерфейс 246, компьютерное запоминающее устройство 248 и память 250 компьютера. Интерфейс 242 аппаратных средств позволяет процессору 244 передавать и принимать команды и данные для управления функционированием медицинского устройства 200. Процессор 244 дополнительно связан с пользовательским интерфейсом 246, компьютерным запоминающим устройством 248 и памятью 250 компьютера.
Компьютерное запоминающее устройство 248 показано как содержащее данные 252 местоположения. Данные 252 местоположения описывают местоположение точек 224, 226, 228, 230 воздействия ультразвуком. Компьютерное запоминающее устройство 248 дополнительно показано как содержащее траекторию 254 воздействия ультразвуком, которая была вычислена для каждой из точек 224, 226, 228, 230 воздействия ультразвуком. Компьютерное запоминающее устройство 248 показано как дополнительно содержащее данные 256 области совпадения. Данные 256 области совпадения содержат данные совпадений траектории 254 воздействия ультразвуком в области 217 ближнего поля. Компьютерное запоминающее устройство 248 показано как дополнительно содержащее команды 258 управления преобразователем. Команды 258 управления преобразователем были сформированы для минимизации нагревания в области 217 ближнего поля, когда точки 224, 226, 228, 230 воздействия ультразвуком подвергаются действию ультразвука.
Память 250 компьютера дополнительно показана как содержащая модуль 260 управления. Модуль 260 управления содержит машиноисполняемый код, который позволяет процессору 244 управлять работой и функциями медицинского устройства 200. Память 250 компьютера дополнительно показана как содержащая геометрическую модель 262 элемента преобразователя. Геометрическая модель 262 элемента преобразователя имеет возможность использовать данные 252 местоположения для вычисления траектории 254 воздействия ультразвуком. Память 250 компьютера дополнительно показана как содержащая модуль обнаружения совпадения. Модуль 264 обнаружения совпадения содержит машиноисполняемый код, который позволяет процессору 244 использовать траекторию 254 воздействия ультразвуком для обнаружения геометрически совпадающих областей. Идентификация этих совпадающих областей обозначена как 256. Память 250 компьютера дополнительно показана как содержащая модуль 266 управления формированием преобразователя. Модуль 266 управления формированием преобразователя имеет возможность использовать данные 252 местоположения и данные 256 области совпадения для формирования команд 258 управления преобразователем.
Высокоинтенсивный фокусированный ультразвук (HIFU) представляет собой способ локального нагрева ткани. Хотя задача состоит в том, чтобы нагреть только выбранную целевую область, окружающая ткань, через которую распространяется ультразвук, будет неизбежно нагрета до некоторой степени. Последовательные воздействия ультразвуком с полностью или частично совпадающей траекторией пучка приведет к возрастанию общего нагревания. В результате оказываются необходимыми периоды охлаждения между воздействиями ультразвуком для исключения чрезмерного нагревания ткани вне целевой области. Длительные периоды охлаждения могут значительно препятствовать эффективности лечения.
Требуется отсутствие периода охлаждения между двумя воздействиями ультразвуком, если траектории пучка воздействия ультразвуком не совпадают. Таким образом, эффективность лечения может быть оптимизирована, исключая совпадение траекторий пучка для различных воздействий ультразвуком.
Фокусированные ультразвуковые преобразователи обычно представляют собой фазированные матрицы, состоящие из множества элементов преобразователя. Ультразвуковому пучку можно придать форму, выключая часть элементов или иначе регулируя мощность, передаваемую от каждого элемента. Формирование диаграммы направленности обычно используется для того чтобы избежать нагрева чувствительной ткани.
Варианты выполнения могут скомбинировать два вышеупомянутых способа: формирование диаграммы направленности используется при минимизации суммарного нагревания, вызываемого совпадающими траекториями пучков. Суммарное нагревание может быть уменьшено путем уменьшения мощности в элементах, из которых передаваемая мощность распространяется через область совпадения. Изобретение позволяет сократить периоды охлаждения и таким образом выполнять более эффективное лечение.
Размер целевой области чаще всего весьма ограничен. Поэтому совпадения пучков нельзя полностью исключить только путем управления местоположением воздействия ультразвуком. С помощью формирования диаграммы направленности может быть дополнительно уменьшен эффект совпадения или его можно даже полностью избежать.
Кроме того, нагревание в траектории пучка может быть неоднородным. Варьирование свойств ткани может привести к несколько большему повышению температуры или к более медленному охлаждению в некоторой части траектории пучка. В результате даже одно воздействие ультразвуком может привести к нежелательному повреждению ткани, если оно не прерывается до достижения желаемого результата в целевой области. При формировании диаграммы направленности оказывается возможным уменьшить нагревание в определенной области, позволяя дольше продолжать воздействие ультразвуком. Кроме того, если последовательные воздействия ультразвуком были выполнены вслед друг за другом, время охлаждения определяется тканью, требующей наибольшего времени охлаждения. В таком случае формирование диаграммы направленности может быть использовано для исключения совпадения пучков конкретно в пределах данной ткани.
В соответствии с первым объектом формирование диаграммы направленности может быть использовано для минимизации суммарного нагревания от воздействия ультразвуком с совпадающими траекториями пучка. Это может быть достигнуто или переключением части элементов полностью таким образом, чтобы в общем не было совпадения, или уменьшением мощности в элементах, от которых передаваемая мощность проходит через область совпадения таким образом, чтобы суммарное нагревание/плотность энергии была не большей в этой области, чем в другом месте в траектории пучка.
В соответствии со вторым объектом формирование диаграммы направленности может быть использовано для предотвращения чрезмерного нагревания, локально в областях, которые особенно подвержены нагреванию. Такие области могут быть определены, например, на основании собранных данных о температуре или на основании априорного знания. Данные о температуре могут быть учтены динамически, то есть непосредственно при измерении. Подход тогда может быть применимым не только для управления суммарным нагреванием, вызываемым многократным воздействием ультразвуком, но также и для предотвращения чрезмерного нагревания во время одного воздействия ультразвуком.
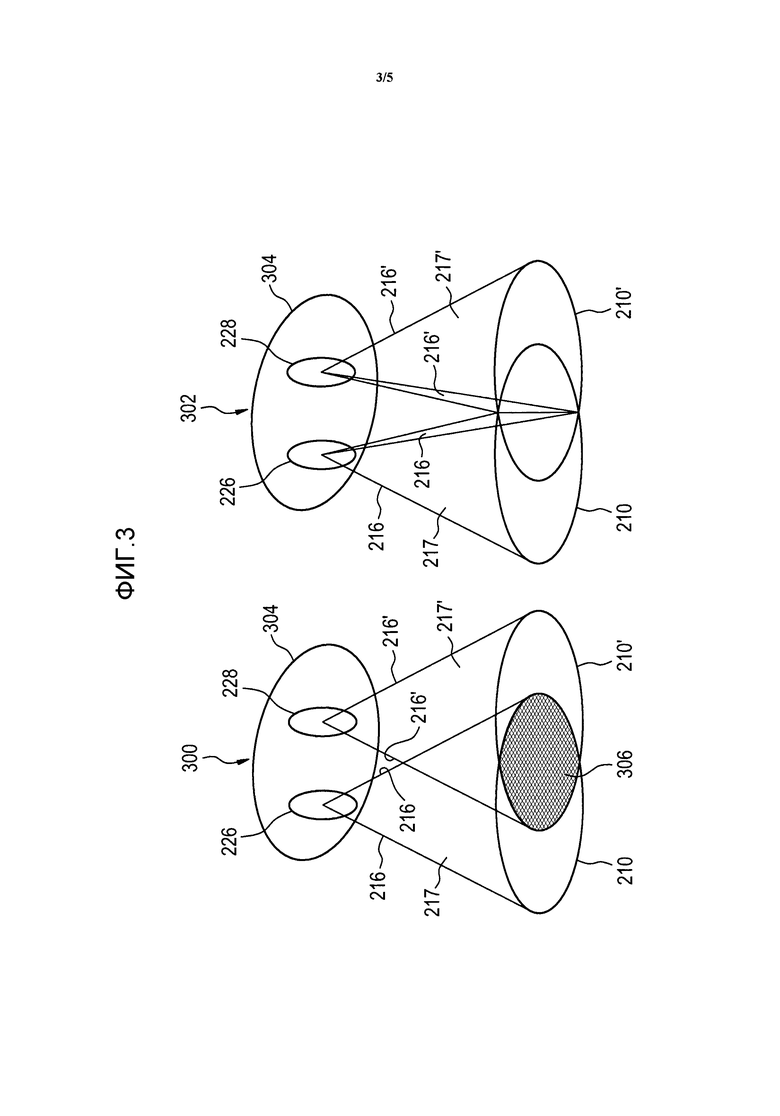
На Фиг. 3 показаны два вида 300 и 302 ультразвукового преобразователя 210, 210'. На виде 300 ультразвуковой преобразователь 210 показан в первом положении 210 и втором положении 210'. Ультразвук в двух различных положениях следует траектории, которая была показана на Фиг. 2. Когда ультразвуковой преобразователь находится в первом положении 210, ультразвук следует по объему, задаваемому линиями 216, и имеется область 217 ближнего поля. Ультразвук фокусируется в точку 226 воздействия ультразвуком. Когда ультразвуковой преобразователь находится во втором положении 210', объем ультразвука определяется линиями 216' и фокусируется в точку 228 воздействия ультразвуком. Во втором положении 210' имеется область 217' ближнего поля. Объем, задаваемый линией 304, содержит точки 226 и 228 воздействия ультразвуком. Можно видеть, что когда преобразователь находится в первом 210 и втором 210' положениях, имеется область 306 совпадения двух областей 217 и 217' ближнего поля. Если точки 226 и 228 воздействия ультразвуком подвергаются действию ультразвука последовательно, то область 306 совпадения будет нагреваться дважды. Это может привести к тепловому повреждению ткани в области 306 совпадения. Вид 302 показывает, как вариант выполнения изобретения может уменьшить нагревание в области 306 совпадения. В этом варианте выполнения активная область ультразвуковых преобразователей 210, 210' уменьшается. Можно видеть, что объем, задаваемый линиями 216, не пересекает объем ультразвука, задаваемый линиями 216'. В этом варианте выполнения существенно, что нет совпадения воздействий ультразвуком или имеет место очень малое совпадение воздействий ультразвуком, когда две точки 226 и 228 воздействия ультразвуком подвергаются действию ультразвука. Это может уменьшить нагревание в области 217, 217' ближнего поля и может допустить более быстрое воздействие ультразвуком на точки 226, 228 воздействия ультразвуком, поскольку не требуется времени ожидания или требуется только сокращенное время ожидания между двумя воздействиями ультразвуком.
На Фиг. 3 ультразвуковой пучок представлен с простой геометрической моделью. Переключаемый элемент также может быть основан на более сложной модели распределения плотности энергии, такой как имитационная модель. Кроме того, локальные вариации свойств ткани могут быть учтены для более точной оценки.
В дополнение к распределению плотности энергии способ также может быть основан на моделируемом или измеренном распределении температуры, или на любом сочетании этого. Измеренные данные о температуре могут быть учтены динамически, уже во время отдельного воздействия ультразвуком, то есть элементы могут быть выключены в области, где измерено большое нагревание.
В упрощенной форме изобретение может быть использовано для простой минимизации периода охлаждения, необходимого для отдельного воздействия ультразвуком - манипуляция формой пучка только для этого воздействия ультразвуком на основании знания о предыдущем воздействии ультразвуком. Для еще более эффективной терапии может быть принят во внимание весь план лечения, включая последующие воздействия ультразвуком.
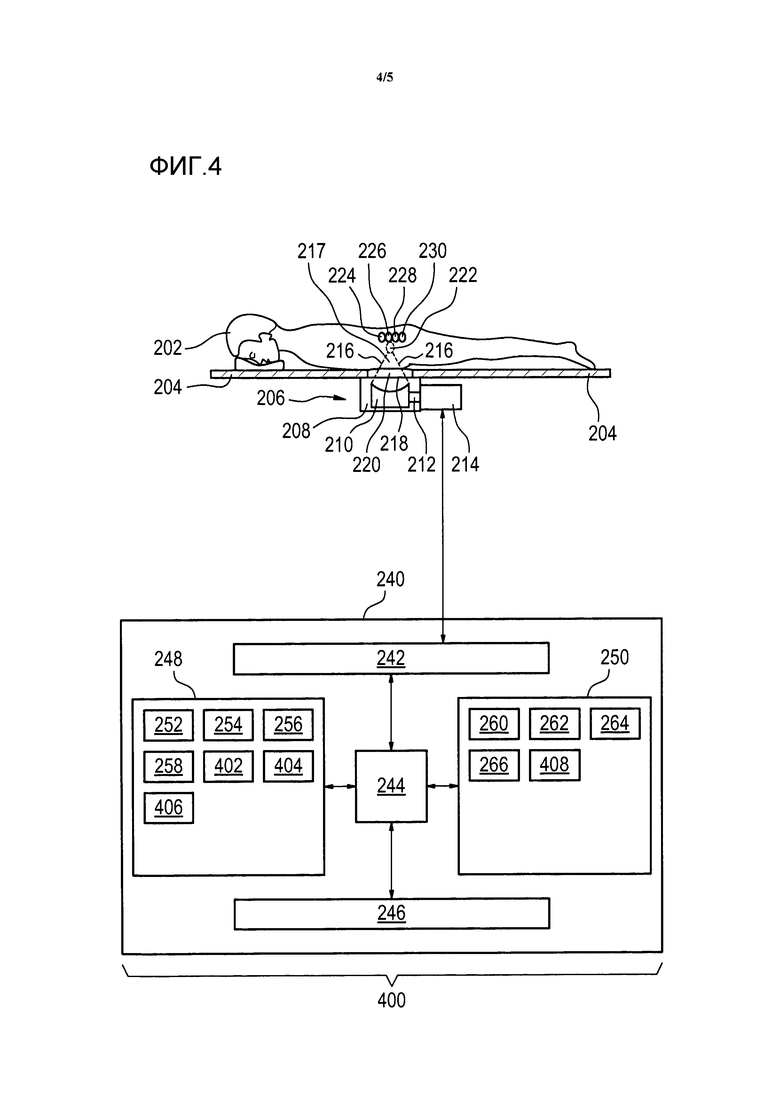
На Фиг. 4 показано медицинское устройство 400 в соответствии с дополнительным вариантом выполнения изобретения. Медицинское устройство 400, показанное на Фиг. 4, подобно медицинскому устройству 200, показанному на Фиг. 2. Устройство 400, показанное на Фиг. 4, имеет дополнительные программные компоненты, которые модифицируют функциональные возможности медицинского устройства 400. В этом варианте выполнения компьютерное запоминающее устройство 248 показано как содержащее карту 402 тепловых свойств. Карта 402 тепловых свойств описывает тепловое свойство в области 217 ближнего поля пациента 202. Компьютерное запоминающее устройство 248 дополнительно показано как содержащее предыдущую тепловую дозу 404, которая описывает предыдущую тепловую дозу, принятую пациентом 202. Компьютерное запоминающее устройство 248 показано как дополнительно содержащее скорректированные команды управления преобразователем. Скорректированные команды управления преобразователем были вычислены, используя предыдущую тепловую дозу и/или карту прогнозируемых тепловых свойств. Не все варианты выполнения будут иметь и предыдущую тепловую дозу и карту 402 тепловых свойств.
Память компьютера показана как содержащая тепловую модель 408 преобразователя, которая используется для вычисления карты 404 прогнозируемых тепловых свойств из карты 402 тепловых свойств и/или предыдущей тепловой дозы 404. Скорректированные команды 406 управления преобразователем были вычислены, используя карту 404 прогнозируемых тепловых свойств, данные местоположения 252 и данные 256 области совпадения модулем 266 формирования команд управления преобразователем.
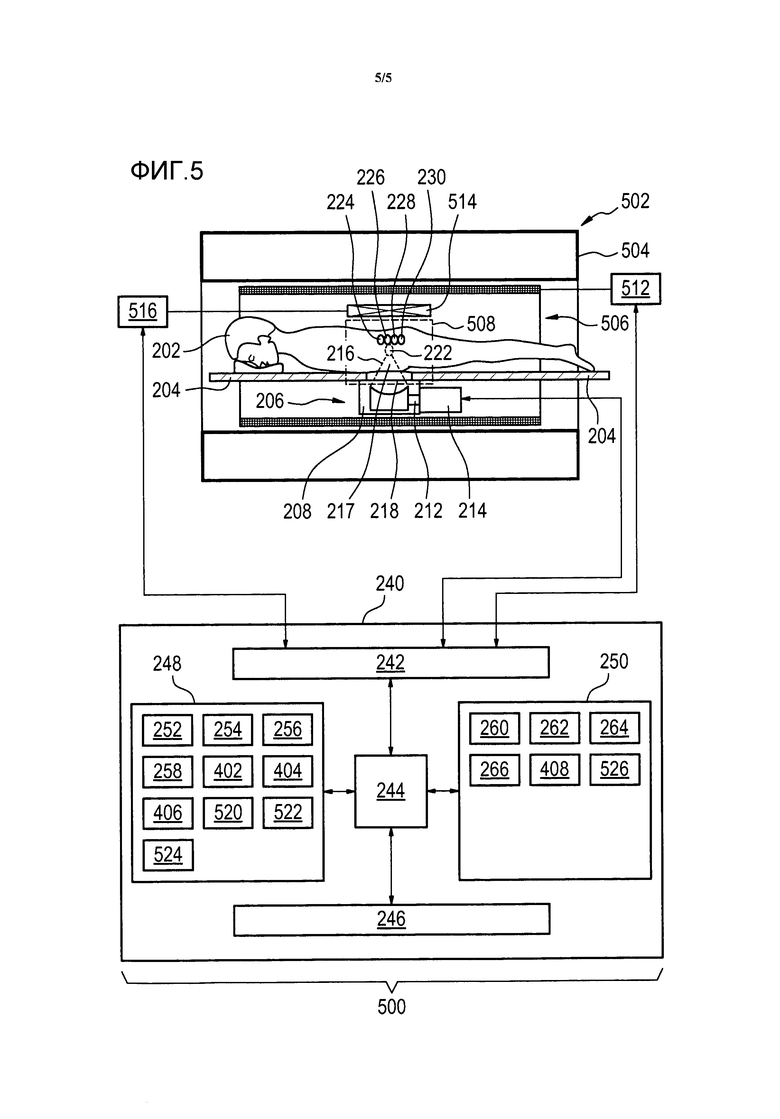
На Фиг. 5 показан дополнительный пример медицинского устройства 500. Медицинское устройство 500 подобно медицинскому устройству 400, показанному на Фиг. 4. В этом варианте выполнения имеется система 502 магнитно-резонансной визуализации для получения тепловых магнитно-резонансных данных. Система магнитно-резонансной визуализации содержит магнит 504. Магнит 504 представляет собой цилиндрический сверхпроводящий магнит с проходящим через его центр туннелем 506. В различных вариантах выполнения механический привод/блок электропитания 214 расположен внутри или снаружи туннеля 506 магнита 504.
Магнит имеет охлаждаемый жидким гелием криостат со сверхпроводящими катушками. Также возможно использовать постоянный или резистивный магниты. Использование магнитов различных типов также возможно, например, также возможно использовать и расщепленный цилиндрический магнит, и так называемый открытый магнит. Расщепленный цилиндрический магнит подобен стандартному цилиндрическому магниту, за исключением того, что криостат был расщеплен на две секции, чтобы позволить доступ к изоплоскости магнита, такие магниты, могут, например, использоваться вместе с терапией пучком заряженных частиц. Открытый магнит имеет две секции магнита, одна выше другой и с промежутком между ними, который достаточно велик, чтобы принять пациента: конфигурация двух областей секций подобна таковой для катушек Гельмгольца. Открытые магниты популярны потому, что пациент оказывается в менее замкнутом пространстве. Внутри криостата цилиндрического магнита имеется узел сверхпроводящих катушек. В пределах тоннеля 506 цилиндрического магнита имеется зона 508 визуализации, где магнитное поле сильно и достаточно однородно для выполнения магнитно-резонансной визуализации.
В пределах тоннеля 506 магнита имеется также набор катушек 510 градиентного магнитного поля, которые используются для получения магнитно-резонансных данных при пространственном кодировании магнитных спинов в пределах зоны 508 визуализации магнита 504. Катушки градиентного магнитного поля соединяются с блоком 512 электропитания катушек градиента магнитного поля. Катушки 510 градиентного магнитного поля принципиально важны для визуализации. Обычно катушки градиентного магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Блок 512 электропитания для градиентного магнитного поля подает ток на катушки 510 градиента магнитного поля. Подаваемый на катушки градиента магнитного поля ток управляется как функция времени и может быть линейно изменяющимся или импульсным током.
Как смежная с зоной 508 визуализации располагается радиочастотная катушка 514 для управления ориентациями магнитных спинов в пределах зоны 508 визуализации и для приема радиочастотного отклика от спинов также в пределах зоны визуализации. Радиочастотная катушка может содержать множество элементов катушек. Радиочастотная катушка может также обозначаться как канал, или антенна. Радиочастотная катушка 514 соединяется с радиочастотным приемопередатчиком 516. Радиочастотная катушка 514 и радиочастотный приемопередатчик 516 могут быть заменены отдельными передающей и приемной катушками и отдельными передатчиком и приемником. Следует понимать, что радиочастотная катушка 514 и радиочастотный приемопередатчик 516 являются принципиально важными. Радиочастотная катушка 514 одинаково служит и как передающая антенна и как приемная антенна. Аналогично приемопередатчик 516 может быть также представлен как отдельный передатчик и отдельный приемник.
Компьютерное запоминающее устройство 248 показано как содержащее импульсную последовательность 520. Импульсная последовательность в данном случае представляет собой последовательность команд, выполняемых в разное время, которые позволяют системе 502 магнитно-резонансной визуализации получить магнитно-резонансные данные 522. Компьютерное запоминающее устройство 248 показано как содержащее тепловые магнитно-резонансные данные 522, которые были собраны, используя систему 502 магнитно-резонансной визуализации. Компьютерное запоминающее устройство 248 также показано как содержащее карту 524 тепловых свойств. Карта 524 тепловых свойств была восстановлена из тепловых магнитно-резонансных данных 522.
Память 250 компьютера показана как содержащая модуль 526 реконструкции изображения. Модуль 526 реконструкции изображения содержит машиноисполняемый код 244, который позволяет процессору сформировать карту 524 тепловых свойств из тепловых магнитно-резонансных данных 522. Этот вариант выполнения показан как содержащий предыдущую тепловую дозу 404 в компьютерном запоминающем устройстве 248. Предыдущая тепловая доза 404 является дополнительной в этом варианте выполнения.
Система 502 магнитно-резонансной визуализации может также использоваться для поддержки системы 206 высокоинтенсивного фокусированного ультразвука. Например, посредством обычной магнитно-резонансной визуализации система 502 магнитно-резонансной визуализации может быть использована для идентификации анатомических ориентиров внутри пациента 202, чтобы идентифицировать местоположение точек 224, 226, 228 и 230 воздействия ультразвуком.
Хотя изобретение было показано на чертежах и подробно описано в вышеприведенном описании, такую иллюстрацию и описание следует считать иллюстративными или примерными, но не ограничительными; изобретение не ограничено раскрытыми вариантами выполнения.
Другие вариации раскрытых вариантов выполнения могут быть предусмотрены и выполнены специалистами в данной области техники при осуществлении сформулированного изобретения на основании изучения чертежей, описания и приложенной формулы. В формуле изобретения выражение «содержащий» не исключает другие элементы или этапы, и выражение в единственном числе не исключает множества. Один процессор или другой модуль могут выполнять функции нескольких элементов, упоминаемых в формуле изобретения. Сам по себе тот факт, что некоторые средства приведены в различных зависимых пунктах формулы, не означает, что сочетание этих средств не может быть использовано с достижением преимущества. Компьютерная программа может быть сохранена/распространена на подходящем носителе, такой как оптический носитель данных или полупроводниковый носитель, поставляемые вместе или как часть других аппаратных средств, но также может быть распространена в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение объема изобретения.
Перечень ссылочных позиций:
200 медицинское устройство
202 субъект
204 опора субъекта
206 система высокоинтенсивного фокусированного ультразвука
208 заполненная флюидом камера
210 ультразвуковой преобразователь
210' ультразвуковой преобразователь во 2-м положении
212 механизм
214 механический привод/блок электропитания
216 траектория ультразвука
216' траектория ультразвука во 2-м положении
217 область ближнего поля
217' область ближнего поля во 2-м положении
218 ультразвуковое окно
220 гелевая подушка
222 объем воздействия ультразвуком
224 точка воздействия ультразвуком
226 точка воздействия ультразвуком
228 точка воздействия ультразвуком
230 точка воздействия ультразвуком
240 компьютерная система
242 интерфейс аппаратных средств
244 процессор
246 пользовательский интерфейс
248 компьютерное запоминающее устройство
250 память компьютера
252 данные местоположения
254 траектория воздействия ультразвуком
256 данные области совпадения
258 команды управления преобразователем
260 модуль управления
262 геометрическая модель элемента преобразователя
264 модуль обнаружения совпадения
266 модуль формирования команды управления преобразователем
300 первый вид
302 второй вид
304 целевой объем
306 область совпадения в ближнем поле
400 медицинское устройство
402 карта тепловых свойств
404 предыдущая тепловая доза
404 карта прогнозируемых тепловых свойств
406 скорректированные команды управления преобразователем
408 тепловая модель преобразователя
500 медицинское устройство
502 система магнитно-резонансной визуализации
504 магнит
506 туннель магнита
508 зона визуализации
510 катушки градиента магнитного поля
512 блок электропитания катушки градиента магнитного поля
514 радиочастотная катушка
516 приемопередатчик
520 импульсная последовательность
522 тепловые магнитно-резонансные данные
524 карта тепловых свойств
526 модуль реконструкции изображения
Группа изобретений относится к медицинской технике, а именно к средствам для высокоинтенсивного фокусированного ультразвука. Медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука, включающую ультразвуковой преобразователь с множеством элементов для фокусировки ультразвука в объем воздействия ультразвуком, причем между ультразвуковым преобразователем и объемом воздействия ультразвуком имеется область ближнего поля, а множество элементов преобразователя выполнено с возможностью управления в группах, память для хранения машиноисполняемых команд, процессор для управления медицинским устройством, причем выполнение команд побуждает процессор принимать данные местоположения, описывающие множество точек воздействия ультразвуком, причем каждая из упомянутого множества точек воздействия ультразвуком ассоциирована с различным расположением ультразвукового преобразователя, определять для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя, траекторию воздействия ультразвуком на основании различного расположения ультразвукового преобразователя, обнаруживать область совпадения, используя траекторию воздействия ультразвуком, причем область совпадения указывает на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля, определять команды управления преобразователем, используя область совпадения, и управлять системой. Машиночитаемый носитель медицинского устройства содержит машиноисполняемые команды для выполнения процессором. Способ работы медицинского устройства обеспечивается системой. Использование изобретений позволяет исключить перегрев областей ближнего поля. 3 н. и 12 з.п. ф-лы, 5 ил.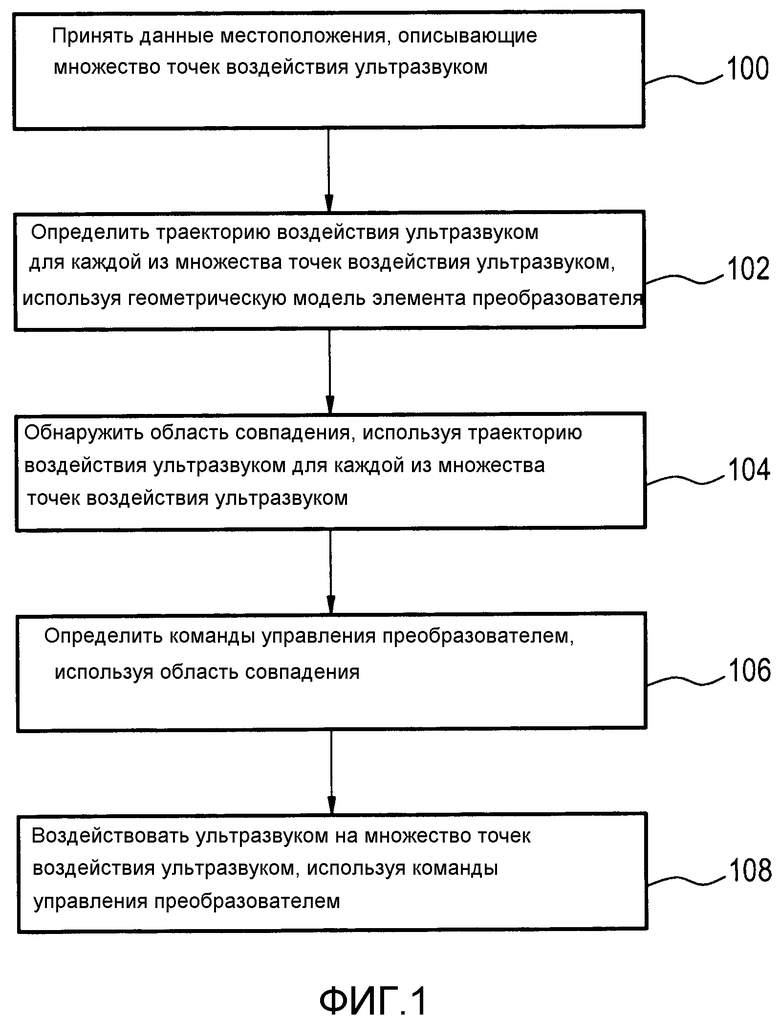
1. Медицинское устройство для воздействия высокоинтенсивным фокусированным ультразвуком, содержащее:
систему высокоинтенсивного фокусированного ультразвука, содержащую ультразвуковой преобразователь с множеством элементов преобразователя для фокусировки ультразвука в объем воздействия ультразвуком, причем между ультразвуковым преобразователем и объемом воздействия ультразвуком имеется область ближнего поля, причем множество элементов преобразователя выполнено с возможностью управления в группах;
память для хранения машиноисполняемых команд;
процессор для управления медицинским устройством, причем выполнение команд побуждает процессор:
- принимать данные местоположения, описывающие множество точек воздействия ультразвуком, причем каждая из упомянутого множества точек воздействия ультразвуком ассоциирована с различным расположением ультразвукового преобразователя;
- определять для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя, траекторию воздействия ультразвуком на основании упомянутого различного расположения ультразвукового преобразователя, ассоциированного с упомянутой одной из множества точек воздействия ультразвуком;
- обнаруживать область совпадения, используя траекторию воздействия ультразвуком, определяемую для каждой из множества точек воздействия ультразвуком, причем область совпадения указывает на совпадение траектории воздействия ультразвуком для двух или более точек воздействия ультразвуком в области ближнего поля;
- определять команды управления преобразователем, используя область совпадения, причем команды преобразователя выполнены с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком; и
- управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
2. Медицинское устройство по п. 1, в котором выполнение команд дополнительно побуждает процессор:
- принимать карту текущих тепловых свойств, описывающую тепловое свойство в области ближнего поля,
- вычислять карту прогнозируемых тепловых свойств для теплового свойства, используя команды управления преобразователем и тепловую модель преобразователя;
- определять скорректированные команды управления преобразователем, используя карту прогнозируемых тепловых свойств, причем скорректированные команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя, причем команды выполнены с возможностью побуждения процессора использовать скорректированные команды управления преобразователем для управления системой высокоинтенсивного фокусированного ультразвука во время последовательного воздействия ультразвуком на множество точек воздействия ультразвуком.
3. Медицинское устройство по п. 2, в котором выполнение команд дополнительно побуждает процессор принимать предыдущую тепловую дозу, причем предыдущая тепловая доза описывает тепловую дозу, обусловленную предыдущим воздействием ультразвуком с использованием системы высокоинтенсивного фокусированного ультразвука, и причем карта текущих тепловых свойств и/или карта прогнозируемых тепловых свойств по меньшей мере частично определяются с использованием предыдущей тепловой дозы.
4. Медицинское устройство по п. 2, причем медицинское устройство дополнительно содержит систему магнитно-резонансной визуализации для получения тепловых магнитно-резонансных данных, причем выполнение команд дополнительно побуждает процессор:
- получать тепловые магнитно-резонансные данные, и
- вычислять карту текущих тепловых свойств по меньшей мере частично с использованием тепловых магнитно-резонансных данных.
5. Медицинское устройство по п. 2, в котором выполнение команд побуждает процессор вычислять карту текущих тепловых свойств по меньшей мере частично с использованием тепловой модели преобразователя и набора предыдущих команд управления преобразователем.
6. Медицинское устройство по п. 1, в котором выполнение команд побуждает процессор многократно:
- принимать данные местоположения, описывающие множество точек воздействия ультразвуком;
- определять траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя;
- обнаруживать область совпадения, используя траекторию воздействия ультразвуком для каждой из множества точек воздействия ультразвуком, причем область совпадения указывает на совпадение траектории воздействия ультразвуком двух или более точек воздействия ультразвуком в области ближнего поля;
- определять команды управления преобразователем, выполненные с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком; и
- управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
7. Медицинское устройство по п. 6, в котором выполнение команд дополнительно побуждает процессор:
- принимать карту текущих тепловых свойств, описывающую тепловое свойство в области ближнего поля;
- вычислять карту прогнозируемых тепловых свойств для теплового свойства, используя команды управления преобразователем и тепловую модель преобразователя; и
- определять скорректированные команды управления преобразователем, используя карту прогнозируемых тепловых свойств, причем скорректированные команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя, при этом команды выполнены с возможностью побуждать процессор использовать скорректированные команды управления преобразователем для управления системой высокоинтенсивного сфокусированного ультразвука во время последовательного воздействия ультразвуком на множество точек воздействия ультразвуком; и
выполнение команд дополнительно побуждает процессор многократно:
- принимать карту текущих тепловых свойств,
- вычислять карту прогнозируемых тепловых свойств, используя команды управления преобразователем и тепловую модель преобразователя;
- определять скорректированные команды управления преобразователем, используя карту прогнозируемых тепловых свойств; и
- управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
8. Медицинское устройство по п. 7, в котором множество элементов преобразователя управляется для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком, используя любое из следующего: выборочное выключение первой части множества элементов преобразователя, выборочное уменьшение амплитуды ультразвуковой энергии, формируемой второй частью множества элементов преобразователя, и сочетания этого.
9. Медицинское устройство по п. 8, в котором каждый из множества элементов преобразователя управляется по отдельности.
10. Медицинское устройство по п. 2, в котором тепловое свойство представляет собой любое из следующего: температуру, максимальную температуру, тепловую дозу, время охлаждения и сочетания этого.
11. Машиночитаемый носитель медицинского устройства для воздействия высокоинтенсивным фокусированным ультразвуком, причем машиночитаемый носитель содержит машиноисполняемые команды для выполнения процессором, причем медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука, содержащую ультразвуковой преобразователь с множеством элементов преобразователя для фокусирования ультразвука в объем воздействия ультразвуком, причем между ультразвуковым преобразователем и объемом воздействия ультразвуком имеется область ближнего поля, причем множество элементов преобразователя управляются в группах, причем выполнение команд побуждает процессор:
- принимать данные местоположения, описывающие множество точек воздействия ультразвуком, причем каждая из упомянутого множества точек воздействия ультразвуком ассоциирована с различным расположением ультразвукового преобразователя;
- определять для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя, траекторию воздействия ультразвуком на основании упомянутого различного расположения ультразвукового преобразователя, ассоциированного с упомянутой одной из множества точек воздействия ультразвуком;
- обнаруживать область совпадения с использованием траектории воздействия ультразвуком, определяемой для каждой из множества точек воздействия ультразвуком, причем область совпадения указывает на совпадение траектории воздействия ультразвуком на две или более точек воздействия ультразвуком в области ближнего поля;
- определять команды управления преобразователем с использованием области совпадения, причем команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком; и
- управлять системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
12. Машиночитаемый носитель по п. 11, в котором выполнение команд дополнительно побуждает процессор:
- принимать карту текущих тепловых свойств, описывающую тепловое свойство в области ближнего поля,
- вычислять карту прогнозируемых тепловых свойств для теплового свойства, используя команды управления преобразователем и тепловую модель преобразователя;
- определять скорректированные команды управления преобразователем с использованием карты прогнозируемых тепловых свойств, причем скорректированные команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя, причем команды выполнены с возможностью побуждения процессора использовать скорректированные команды управления преобразователем для управления системой высокоинтенсивного фокусированного ультразвука во время последовательного воздействия ультразвуком на множество точек воздействия ультразвуком.
13. Машиночитаемый носитель по п. 12, в котором выполнение команд дополнительно побуждает процессор принимать предыдущую тепловую дозу, причем предыдущая тепловая доза описывает тепловую дозу, обусловленную предыдущим воздействием ультразвуком с использованием системы высокоинтенсивного фокусированного ультразвука, и причем карта текущих тепловых свойств и/или карта прогнозируемых тепловых свойств по меньшей мере частично определяются с использованием предыдущей тепловой дозы.
14. Машиночитаемый носитель по п. 12, в котором медицинское устройство дополнительно содержит систему магнитно-резонансной визуализации для получения тепловых магнитно-резонансных данных, причем выполнение команд дополнительно побуждает процессор:
- получать тепловые магнитно-резонансные данные, и
- вычислять карту текущих тепловых свойств по меньшей мере частично с использованием тепловых магнитно-резонансных данных.
15. Способ работы медицинского устройства для воздействия высокоинтенсивным фокусированным ультразвуком, причем медицинское устройство содержит систему высокоинтенсивного фокусированного ультразвука, содержащую ультразвуковой преобразователь с множеством элементов преобразователя для фокусировки ультразвука в объем воздействия ультразвуком, причем ультразвуковой преобразователь выполнен с возможностью формирования области ближнего поля между ультразвуковым преобразователем и объемом воздействия ультразвуком, причем множество элементов преобразователя управляются в группах, причем способ содержит этапы, на которых:
- принимают данные местоположения, описывающие множество точек воздействия ультразвуком, причем каждая из упомянутого множества точек воздействия ультразвуком ассоциирована с различным расположением ультразвукового преобразователя;
- определяют для каждой из множества точек воздействия ультразвуком, используя геометрическую модель элемента преобразователя, траекторию воздействия ультразвуком на основании упомянутого различного расположения ультразвукового преобразователя, ассоциированного с упомянутой одной из множества точек воздействия ультразвуком;
- обнаруживают область совпадения с использованием траектории воздействия ультразвуком, определяемой для каждой из множества точек воздействия ультразвуком, причем область совпадения указывает на совпадение траектории воздействия ультразвуком на две или более точек воздействия ультразвуком в области ближнего поля;
- определяют команды управления преобразователем с использованием области совпадения, причем команды управления преобразователем выполнены с возможностью управления множеством элементов преобразователя для уменьшения поглощения ультразвуковой энергии в области совпадения во время воздействия ультразвуком на две или более точек воздействия ультразвуком; и
- управляют системой высокоинтенсивного фокусированного ультразвука для последовательного воздействия ультразвуком на множество точек воздействия ультразвуком, используя команды управления преобразователем.
| US 2006058671 A1, 16.03.2006 | |||
| WO 0243804 A1,06.06.2002 | |||
| WO 2011080631 A2, 07.07.2011 | |||
| СПОСОБ ЛОКАЛЬНОГО НАГРЕВА ВНУТРЕННИХ ТКАНЕЙ ЧЕЛОВЕЧЕСКОГО ТЕЛА | 2006 |
|
RU2334530C2 |
| УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ МОЧЕПОЛОВОЙ СИСТЕМЫ | 1996 |
|
RU2094069C1 |

