Изобретение относится к способам проведения поисково-спасательных работ с помощью беспилотных авиационных систем, а именно к способу обнаружения потерявшегося человека в лесном массиве или другой местности в отсутствие покрытия сотовой связи, с помощью которого можно будет ускорить и облегчить процесс поиска.
На сегодняшний день у большого процента населения всегда при себе имеется сотовый телефон, и в чрезвычайных ситуациях абонент пытается связаться со службой спасения. При поиске человека каждая минута на счету. Актуальной задачей в настоящее время является разработка способов и средств, позволяющих ускорить и облегчить процесс поиска на местности, где отсутствует покрытие сотовой связи (например, лесной массив). Перспективным направлением является использование беспилотных летательных аппаратов (БПЛА) в поисково-спасательных работах.
Известен "Способ проведения поисково-спасательных работ", представленный в описании к патенту РФ №2 698 893, опубл. 30.08.2019 Бюл. № 25, МПК:A62B 99/00.
Способ проведения поисково-спасательных работ включает введение, перед запуском беспилотного летательного аппарата (БПЛА), по радиоканалу, координат объекта поиска - ОП (в частности, пострадавшего или группы пострадавших), считываемых с размещенного на ОП блока аварийной связи (GPS-трекера), оценку состояния ОП, формирование траектории полета БПЛА в район поиска, определение границ поиска, осуществление допоиска ОП с помощью телевизионной и инфракрасной (ИК) видеокамеры с выделением ОП посредством программного обеспечения на основе нейросети с последующим уточнением его оператором. При этом блок аварийной связи (GPS-трекер) может быть оснащен надувным поисковым ориентиром, снабженным световым когерентным излучателем и поднимаемым на заданную высоту. При необходимости способ подразумевает ретрансляцию данных через сеть связи и бортовых ретрансляторов других БПЛА. При обнаружении ОП в области допоиска на пульт оператора наземного пункта управления (НПУ) поступает видеоинформация об ОП, степени его активности. Оператор НПУ по радиоканалу подает на БПЛА команду на сброс (или доставку посадкой) полезного груза, а именно средств индивидуального пользования (воды, провианта, одежды, спичек, средств индивидуальной защиты, медикаментов, мобильного телефона, сигнальной дымовой шашки для ориентирования групп спасания и т.д.).
Использование телевизионной и инфракрасной (ИК) видеокамеры при поиске дают хорошие результаты при условии хорошей видимости.
Однако, в случае плохой видимости в условиях леса поиск людей данным способом проблематичен.
Известен способ обнаружения потерявшегося человека с использованием сигнала мобильного телефона, выбранный в качестве прототипа, приведенный в статье под названием "Применение установленных на БПЛА систем обнаружения GSM-устройств для поиска пострадавших в результате ЧС", Думин Д. И. и др. // Информационные технологии и телекоммуникации. – 2018. – Т. 6. – №. 2. – С. 62-69, заключающийся в том, что на первом этапе поисково-спасательная группа разворачивает поисково-спасательный пункт (ПСП) неподалеку от участка местности где предположительно потерялся человек. С ПСП оператор одновременно запускает 3 БПЛА с прикрепленной базовой станцией к каждому БПЛА, также оператор задает радиус зоны поиска для БПЛА. Во время облёта БПЛА очага чрезвычайной ситуации (ЧС) имитатор базовой станции, по широковещательному каналу будет поочерёдно переводить обнаруженные мобильные абоненты в активный режим, на максимальной, для мобильного устройства стандарта GSM-900, мощности передачи в 1 Ватт. А поисковая аппаратура измеряет направление и уровень сигнала, соответствующего мобильного абонента. Благодаря наличию модуля глобального позиционирования GPS/ГЛОНАС будет происходить привязка местоположения мобильного абонента к глобальным координатам и передача этих данных в реальном времени в оперативный штаб ЧС, руководящий проведением спасательных работ.
Однако одного измерения недостаточно для определения точного местоположения мобильного абонента, так как мощность сигнала может быть искажена и не соответствовать расстоянию до источника сигнала из-за рельефа местности, наличия густого лесного массива и т.д. Чтобы определить точное местоположение источника сигнала необходимо произвести триангуляцию с использованием трёх БПЛА, при этом размер окружности, которую три БПЛА будут описывать будет соответствовать размеру зоны поиска.
Недостатком предлагаемого способа является то, что зона поиска ограничивается зоной передачи сигнала между БПЛА и ПСП. На практике это расстояние достигает единицы км., что может быть недостаточно для успешного выполнения поисково-спасательной операции (ПСО). Учитывая, что поиски зачастую проходят в зонах, покрывающих десятки квадратных километров, ПСП, с которого производится управление БПЛА, придется неоднократно переносить, что кратно увеличивает время поиска. К тому же перемещение ПСП не всегда является возможным, ввиду сложно проходимых условий местности, что делает невозможным проведение ПСО, и в итоге потерявшийся человек не будет обнаружен. Возникает противоречие между допустимой зоной передачи сигнала БПЛА и дальностью размещения ПСП, обусловленной трудно проходимой местностью. Данное противоречие позволяет снять заявляемое техническое решение.
Задачей изобретения является обеспечение возможности поиска человека в трудно проходимых условиях местности поиска.
Поставленная задача решается с достижением технического результата, а именно, оперативный поиск пропавшего человека в условиях трудно проходимой местности.
Решить поставленную задачу с достижением указанного технического результата позволяет заявляемый способ определения местоположения потерявшегося человека с мобильным устройством, основанный на использовании БПЛА, каждый из которых снабжен портативным имитатором базовой станции, модулем глобального позиционирования и возможностью триангуляции источника сигнала, антенной, подключенной к базовой станции для обнаружения абонентского терминала, и антенной, подключенной к модулю для организации беспроводной связи между БПЛА и сетью БПЛА с наземным блоком управления ПСП, включающий этапы, на которых:
- разворачивают ПСП в районе, максимально приближенном к месту, в котором предположительно потерялся человек;
- с ПСП запускают N-количество БПЛА, при этом N определяется по формуле N=L/s, где L - предполагаемое расстояние от ПСП до конца зоны поиска, s - радиус зоны передачи сигнала БПЛА;
- БПЛА осуществляют облет зоны поиска таким образом, что образуют сеть связанных между собой БПЛА и разнесенных в пространстве между ПСП и всей зоной поиска;
- во время облета портативная базовая станция каждого БПЛА производит поиск сигналов абонентского терминала потерявшегося человека;
- при обнаружении сигнала абонентского терминала с помощью аппаратуры БПЛА измеряют мощность принимаемого сигнала, по величине которой определяют степень близости его к цели поиска;
- по принятому сигналу с БПЛА оператор на ПСП проверяет идентификатор обнаруженного абонента;
- если идентификатор соответствует искомому абонентскому терминалу, то оператор дает команду двум соседним БПЛА на перемещение в зону БПЛА, обнаружившего абонента;
- локализацию местоположения абонента производят методом триангуляции, и посредством глобального модуля позиционирования осуществляют его привязку к глобальным координатам;
- после определения глобальных координат БПЛА восстанавливают связь с ПСП, по которой передают глобальные координаты оператору.
Оперативный поиск человека с точной локализацией его места нахождения в труднодоступной области стал возможным благодаря использованию N БПЛА, которые, используя метод триангуляции, определяют координаты потерявшегося человека, а затем, благодаря самоорганизующейся сети, восстанавливают связь с ПСП, что исключает необходимость переноса ПСП для сокращения расстояния между ПСП и зоной поиска человека.
Из уровня техники не обнаружены источники информации, раскрывающие сущность заявляемого "Способа определения местоположения потерявшегося человека с мобильным устройством". Следовательно, можно констатировать о соответствии заявляемого способа критериям "новизна" и "изобретательский уровень".
Далее приводится пример конкретного осуществления "Способ определения местоположения потерявшегося человека с мобильным устройством", который не охватывает и, тем более, не ограничивает весь объем притязаний данного технического решения, а является лишь иллюстрирующим материалом, подтверждающим возможность осуществления способа.
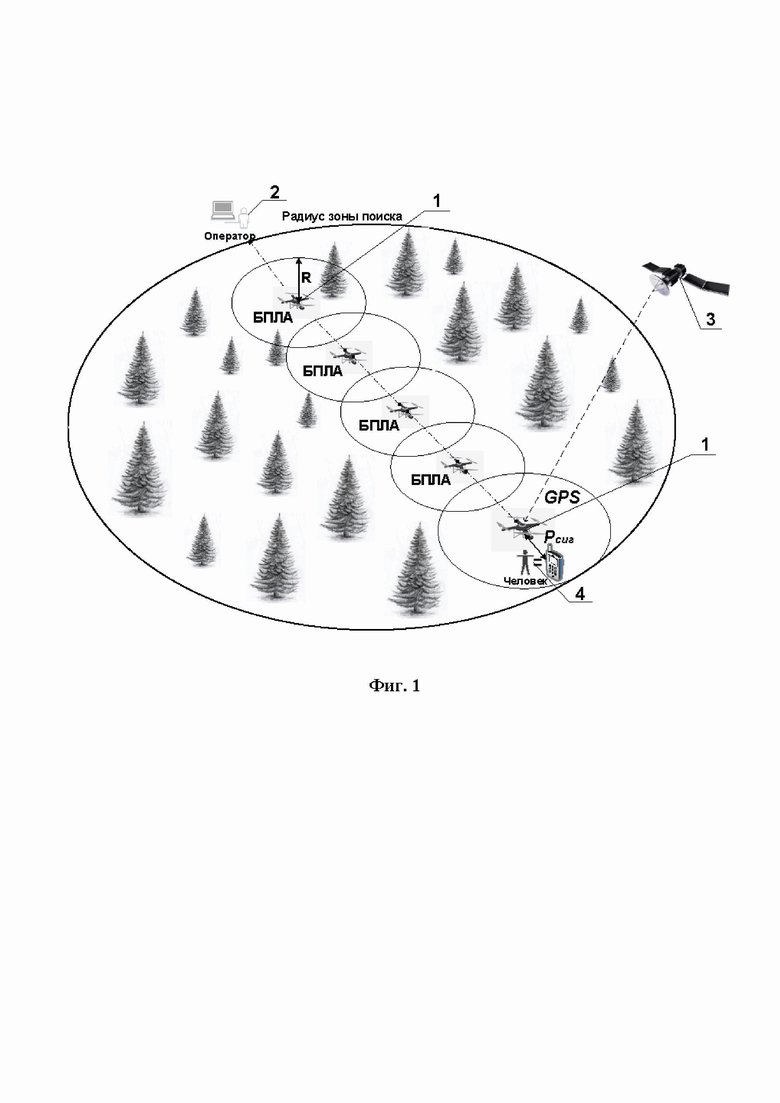
На фиг. 1 приведена организация системы, с помощью которой осуществляется заявляемый способ.
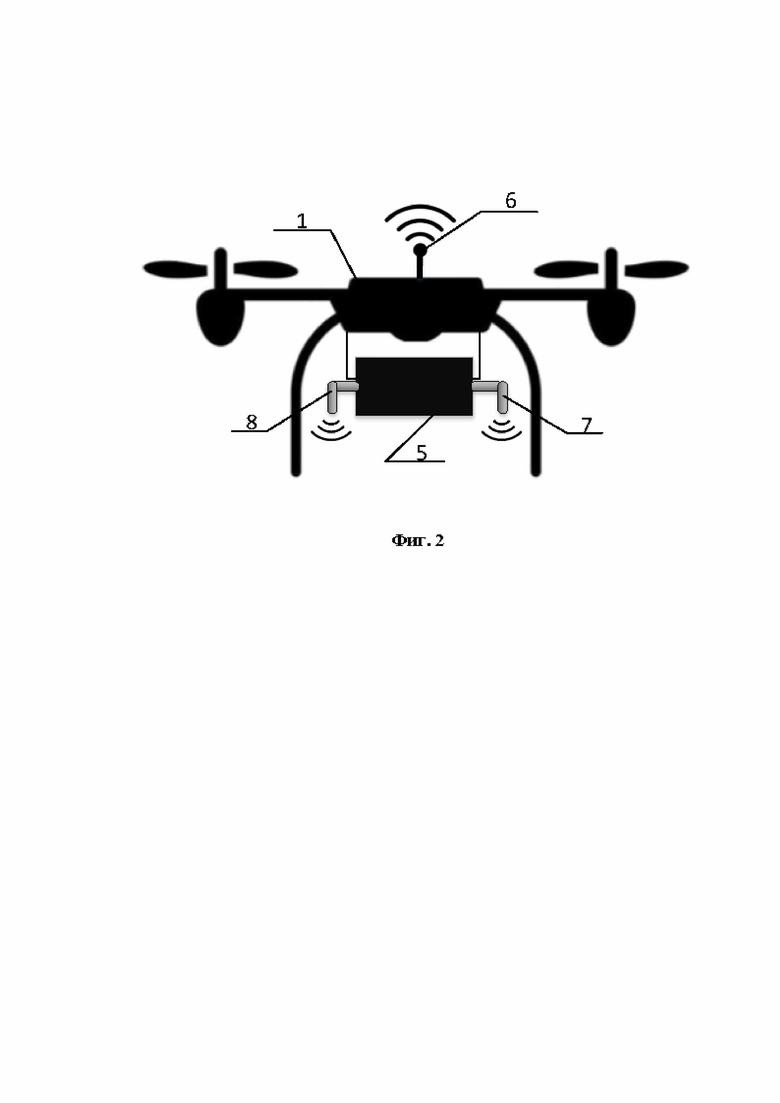
На фиг. 2 приведена структурная схема устройств, находящихся на БПЛА.
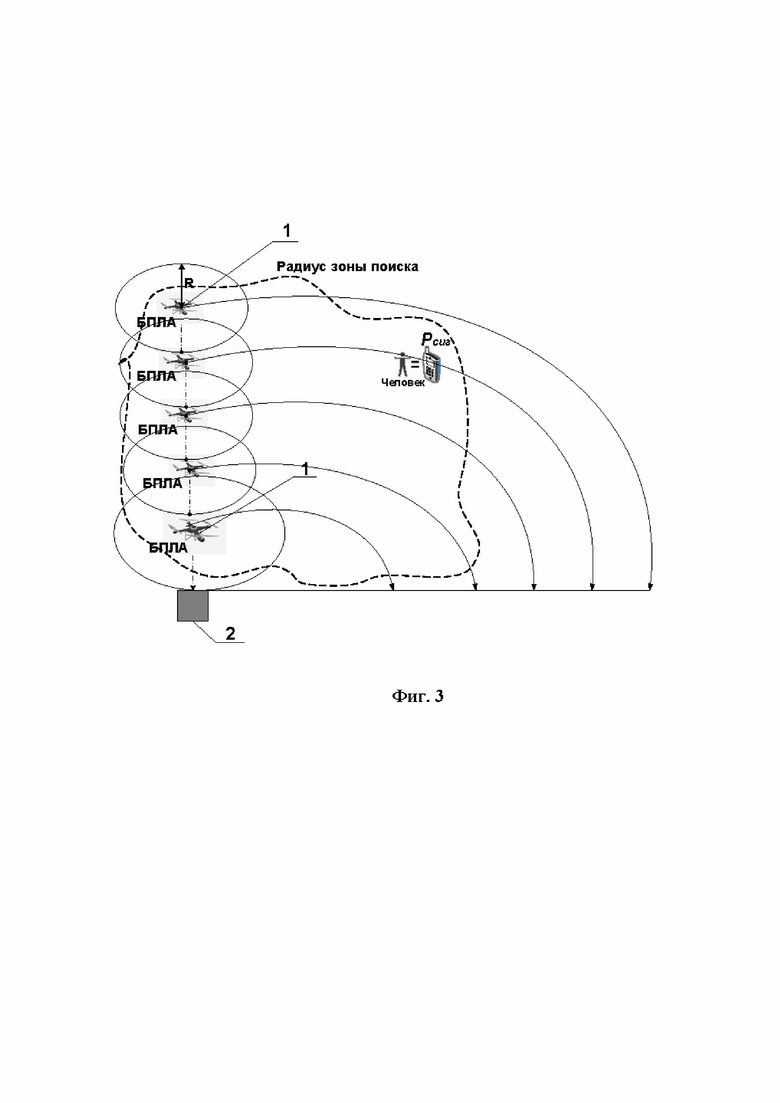
На фиг. 3 приведена схема облета сети БПЛА зоны поиска.
Система, представленная на фиг. 1, содержит N-количество БПЛА 1, связанных между собой по беспроводному каналу на допустимом для них расстоянии и образующих самоорганизующуюся сеть, связанную с ПСП 2, при этом каждый БПЛА 1 имеет связь со спутником 3 и возможность соединения с абонентским терминалом 4 искомого человека.
Каждый БПЛА 1 (квадрокоптеры, октокоптеры) снабжен устройствами, представленными на Фиг.2: портативным имитатором базовой станции 5, модулем глобального позиционирования ГЛОНАС 6, антенной 7, подключенной к базовой станции для обнаружения абонентского терминала и антенной 8, подключенной к модулю для организации беспроводной связи между БПЛА и сетью БПЛА с ПСП 2.
Современные БПЛА имеют вес до 1 кг и имеют возможность доставлять полезную нагрузку весом от 5 кг со средней скоростью 10~35 км\ч на расстояние до
20-30 км и более в зависимости от используемых батарейных элементов.
Способ осуществляется следующим образом.
Оперативная группа МЧС задает зону поиска человека поисково-спасательной группе. Поисково-спасательная группа выезжает к области, обозначенной МЧС, разворачивает ПСП 2. Далее выполняет запуск N-количества БПЛА 1, которые оснащены модулями глобального позиционирования GPS/ГЛОНАС 6. БПЛА 1 в заданной области по радиусу (координаты и радиус поиска задает оператор) производят поиск абонентского терминала 4.
Количество N определяется по формуле N=L/s, где L-предполагаемое расстояние от ПСП до конца зоны поиска, s-радиус зоны передачи сигнала БПЛА.
БПЛА 1 образуют самоорганизующуюся сеть между собой, далее выстраиваются в линию от ПСП 2 и осуществляют облет зоны поиска по радиусу таким образом, что площадь поиска равна  (в соответствии с Фиг.3);
(в соответствии с Фиг.3);
Во время облёта БПЛА 1 зоны поиска портативная базовая станция 5, будет производить обнаружение сигналов абонентского терминала 4 потерявшегося человека. При этом аппаратура БПЛА 1 измеряет мощность принимаемого сигнала, чем больше мощность принимаемого сигнала, тем меньше расстояния между БПЛА 1 и абонентским терминалом 4. После чего оператор проверяет идентификатор обнаруженного абонента и, если идентификатор соответствует искомому абонентскому терминалу 4, то фиксируется факт обнаружения искомого абонентского терминала 4. Посредством модуля связи между БПЛА и оператором, оператор дает команду двум соседним БПЛА 1, обнаружившего абонента на перемещение в его зону поиска. Переместившись в предполагаемое местоположение абонента 4, БПЛА 1 производят точную локализацию его местоположения методом триангуляции. После чего БПЛА 1 фиксирует координаты абонентского терминала 4 посредством системы ГЛОНАС 6 и передает эти данные в реальном времени оператору на ПСП 2 по самоорганизующейся сети.
Применение предлагаемого способа позволит кратно снизить временные затраты на поиск потерявшегося человека и в несколько раз расширит зону поиска, за счет применения N летательных аппаратов, работающих по принципу самоорганизующийся сети, в которой связь удаленного от ПСП БПЛА и не имеющего с ПСП прямого канала передачи данных осуществляется посредством других летательных аппаратов имеющих прямой канал связи с ПСП.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поисковых и спасательных операций с помощью беспилотного воздушного судна | 2023 |
|
RU2818393C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ЖИЗНЕДЕЯТЕЛЬНОСТИ | 2007 |
|
RU2364939C2 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2016 |
|
RU2622505C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| СПОСОБ ПОИСКА МАЯЧКОВОЙ СИСТЕМЫ | 2021 |
|
RU2785369C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
Изобретение относится к способу определения местоположения потерявшегося человека с мобильным устройством. Для определения местоположения потерявшегося человека используют предварительно вычисленное определенным образом число N беспилотных летательных аппаратов (БПЛА), каждый из которых снабжен портативным имитатором базовой станции, модулем глобального позиционирования с круговой антенной и возможностью триангуляции источника сигнала, приемопередатчиком для организации беспроводной связи между БПЛА и сети БПЛА с наземным блоком управления поисково-спасательного пункта (ПСП), при этом разворачивают ПСП в районе, максимально приближенном к месту, в котором предположительно потерялся человек, запускают N БПЛА, осуществляют облет зоны поиска определенным образом, производят поиск сигналов абонентского терминала потерявшегося человека каждым БПЛА, измеряют мощность сигнала для определения близости к цели поиска, дают команды для перемещения в зону поиска двум соседним БПЛА, с помощью которых определяют координаты местоположения цели поиска, которые затем передают в ПСП. Обеспечивается возможность поиска пропавшего человека в труднопроходимой местности. 3 ил. 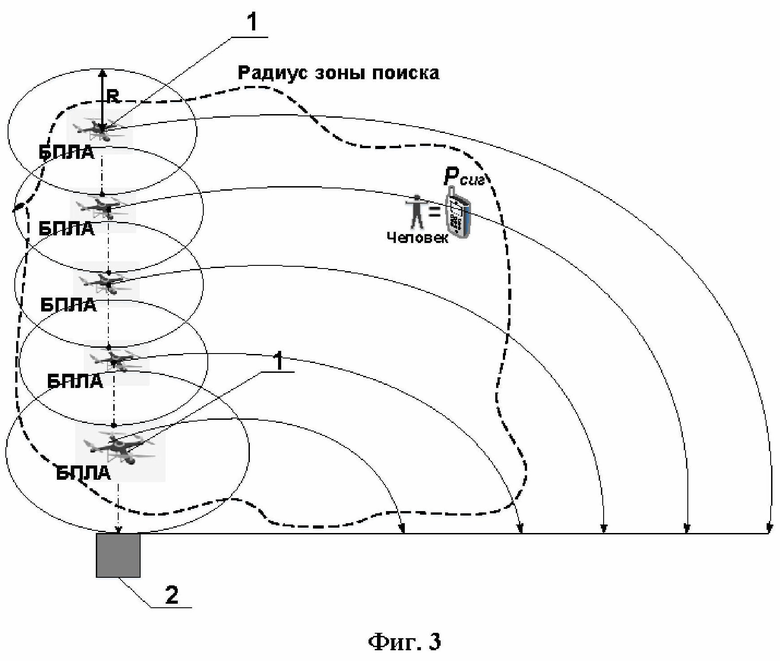
Способ определения местоположения потерявшегося человека с мобильным устройством, основанный на использовании беспилотных летательных аппаратов (БПЛА), каждый из которых снабжен портативным имитатором базовой станции, модулем глобального позиционирования с круговой антенной и возможностью триангуляции источника сигнала, приемопередатчиком для организации беспроводной связи между БПЛА и сети БПЛА с наземным блоком управления поисково-спасательного пункта (ПСП), включающий этапы, на которых:
- разворачивают поисково-спасательный пункт (ПСП) в районе, максимально приближенном к месту, в котором предположительно потерялся человек;
- с ПСП запускают N БПЛА, при этом N определяется по формуле N=L/s, где
L - предполагаемое расстояние от ПСП до конца зоны поиска, s - радиус зоны передачи сигнала БПЛА;
- БПЛА осуществляют облет зоны поиска таким образом, что образуют сеть связанных между собой БПЛА и разнесенных в пространстве между ПСП и всей зоной поиска;
- во время облета портативная базовая станция каждого БПЛА производит поиск сигналов абонентского терминала потерявшегося человека;
- при обнаружении сигнала абонентского терминала с помощью аппаратуры БПЛА измеряют мощность принимаемого сигнала, по величине которой определяют степень близости его к цели поиска;
- по принятым сигналам с БПЛА оператор на ПСП проверяет идентификатор обнаруженного абонента;
- если идентификатор соответствует искомому абонентскому терминалу, то оператор выдает команду двум соседним БПЛА на перемещение в зону БПЛА, обнаружившего абонента;
- локализацию местоположения абонента производят методом триангуляции и посредством глобального модуля позиционирования осуществляют его привязку к глобальным координатам;
- по команде с ПСП восстанавливается сеть БПЛА, по которой глобальные координаты передаются в ПСП.
| Способ охлаждения парафина, битумов твердых марок и тому подобных материалов | 1949 |
|
SU87308A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОТЕРПЕВШЕГО И ТОЧНОЙ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА ДЛЯ НЕГО ПРИ ПРОВЕДЕНИИ ПОИСКОВО-СПАСАТЕЛЬНЫХ ОПЕРАЦИЙ | 2002 |
|
RU2223803C1 |
| EA 201650038 A2, 28.02.2017 | |||
| Фотоприемник | 2021 |
|
RU2775590C1 |
| БУМАЖНО-СЛОИСТЫЙ ПЛАСТИК (ВАРИАНТЫ) | 2013 |
|
RU2520343C1 |

