Изобретение относится к области спасательной техники, а именно к летательным аппаратам вертикального взлета и посадки специального назначения, для применения при чрезвычайных ситуациях, и может быть использовано для поиска людей под завалами вне зоны видимости вооруженным глазом и возможной опасности проведения спасательных работ, мониторинга высотных зданий и сооружений, разведки обстановки внутри помещений через непрозрачные преграды, оказания экстренной помощи людям, терпящим бедствие на отсеченных пожаром верхних этажах зданий, путем доставки туда спасательных средств.
Известен способ, в котором доставку полезного груза осуществляют с помощью беспилотного дистанционно-пилотируемого летательного аппарата, оснащенного бортовым радиоэлектронным оборудованием и парашютом. Спасательные работы осуществляют с помощью парашютирования полезного груза с последующей доставкой его к потерпевшему [Патент 2059423, Российская Федерация, МПК A62B 37/00. Способ спасения терпящих бедствие / Карягин Н.В.; Киселев В.Н.; Федоров Е.Н. Заявитель и патентообладатель Карягин Николай Васильевич. - № 93039158/11, заявл. 30.07.1993; опубл. 10.05.1996].
Недостатком аналога является то, что координаты получают с помощью спутниковой системы, что ведет к удорожанию работ и потере точности вследствие возможного перемещения потерпевшего. При этом существует проблема точного наведения, решаемая, например, с помощью применения системы самонаведения на радиомаяк потерпевшего, содержащей тяжелую систему точного расчета координат, использующую гиростабилизированную платформу и пассивную радиолокационную станцию с антенной большой апертуры.
За прототип принят способ обнаружения потерпевшего и точной доставки полезного груза для него при проведении поисково-спасательных операций, включающий запуск беспилотного летательного аппарата для выхода в район бедствия, который снабжен ретранслятором сигналов радиокомандной линии управления и является возвращаемым, наведение этого аппарата на место нахождения потерпевшего и выбрасывание с этого аппарата к потерпевшему беспилотного летательного аппарата-носителя полезного груза. Управление летательным аппаратом и аппаратом-носителем производят посредством анализа изображения с телевизионной камеры, размещенной на летательном аппарате [Патент 2223803, Российская Федерация, МПК A62B 37/00, G08B 25/00. Способ обнаружения потерпевшего и точной доставки полезного груза для него при проведении поисково-спасательных операций / Кирюшин Игорь Герольдович; заявитель и патентообладатель: Кирюшин Игорь Герольдович; заявл. 25.10.2002; опубл. 20.02.2004].
Недостатками прототипа являются наличие дополнительного аппарата-носителя полезного груза, который уменьшает полезную массу основного носителя, также это увеличивает энергозатраты для взлета, уменьшает дальность полета и требует дополнительной системы управления, что влечет численное увеличение обслуживающего персонала. Поиск пострадавшего осуществляется только на открытой (видимой, прозрачной) поверхности, что неприменимо в случае поиска людей под завалами, за непрозрачными стенами или дымовой завесой при пожаре, что замедляет спасение пострадавших.
Техническим результатом изобретения является ускорение проведения и улучшение качества поисково-спасательной операции с возможностью обнаружения людей и определения их физического состояния в затруднительных (экстремальных) условиях для визуального и физического поиска.
Указанный результат достигается тем, что в способе проведения поисково-спасательных работ, заключающемся в запуске беспилотного летательного аппарата для выхода в район бедствия, наведении беспилотного летательного аппарата на место нахождения потерпевшего и выбрасывании с беспилотного летательного аппарата к потерпевшему полезного груза, запускаемый беспилотный летательный аппарат является возвращаемым, при этом полетом беспилотного летательного аппарата управляют с помощью радиокомандной линии управления, а управление им проводят посредством анализа изображения взаимного расположения беспилотного летательного аппарата, несущего полезный груз и потерпевшего, полученного с телевизионной камеры, причем наведением беспилотного летательного после доставки потерпевшему полезного груза с командного пункта осуществляют возврат возвращаемого беспилотного летательного аппарата, согласно изобретению перед запуском беспилотного летательного аппарата оператор задает координаты границ поиска, высоту полета, начало координат, направление сканирования и шаг сканирования, в пределах которых беспилотный летательный аппарат, обладающий ГЛОНАС, производит поисковую деятельность, после запуска беспилотного летательного аппарата он сканирует территорию с определенной оператором высоты, при этом сканирование осуществляют при помощи сверхширокополосного радара (СШПР), обладающего свойством "видеть" через непрозрачные преграды, а также настроенного на отражение посылаемых им сигналов от человека, при этом рассчитывают расстояние между беспилотным летательным аппаратом и пострадавшим, из анализа которого определяют его физическое состояние, устанавливают уровень СО2 (углекислого газа) в атмосфере с помощью установленного в беспилотном летательном аппарате газоанализатора, по изображению с инфракрасной видеокамеры, которой снабжен беспилотный летательный аппарат, определяют источники огня и повышенной температурной опасности, с помощью лазерного 3D сканера, производящего построение трехмерной карты местности, определяют местонахождение препятствий, которые необходимо облететь, данные со всех детектирующих устройств поступают в микрокомпьютер, установленный в составе беспилотного летательного аппарата, одновременно посредством радиоретранслятора они передаются на пульт оператора, в случае нахождения пострадавшего человека в области сканирования, в ходе обработки данных с СШПР микрокомпьютером, на пульт оператора подается сигнал и с помощью беспилотного летательного аппарата доставляют средства индивидуальной защиты и медикаменты для оказания первой медицинской помощи в случае, если пострадавший в сознании и находится на поверхности земли, после произведенной посадки рядом с пострадавшим в беспилотном летательном аппарате открывают контейнер, содержащий средства индивидуальной защиты, мобильный телефон для связи с поисково-спасательным отрядом, а также аптечку первой помощи.
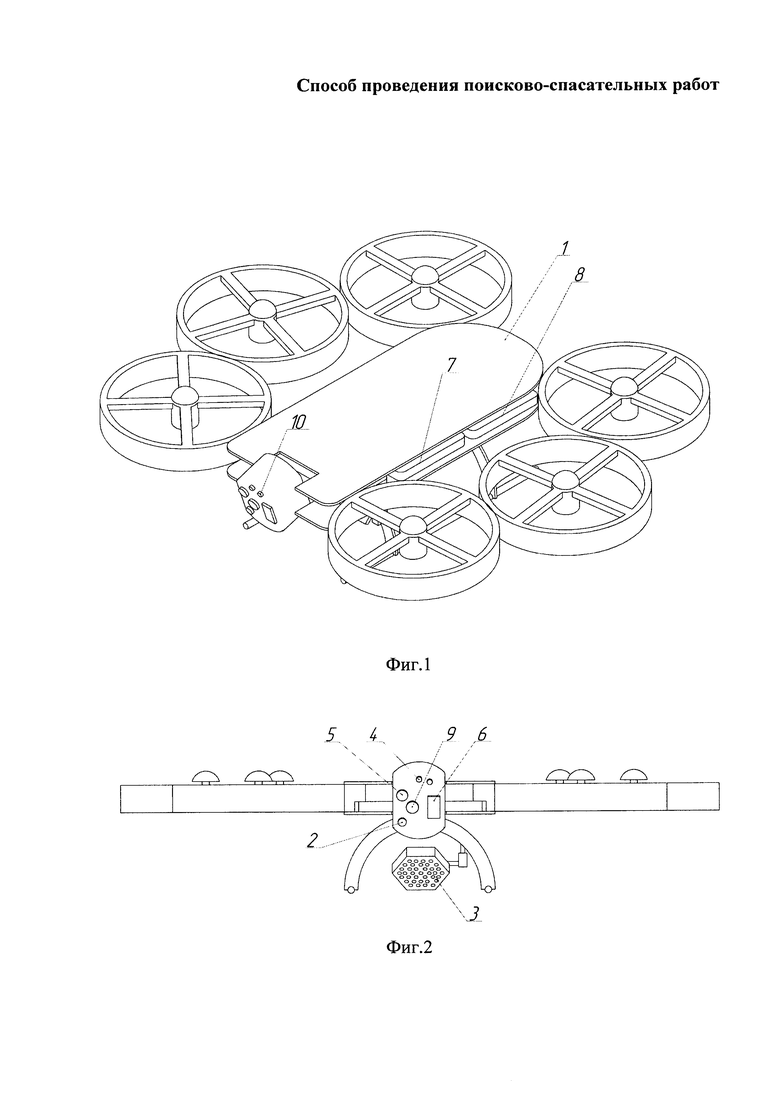
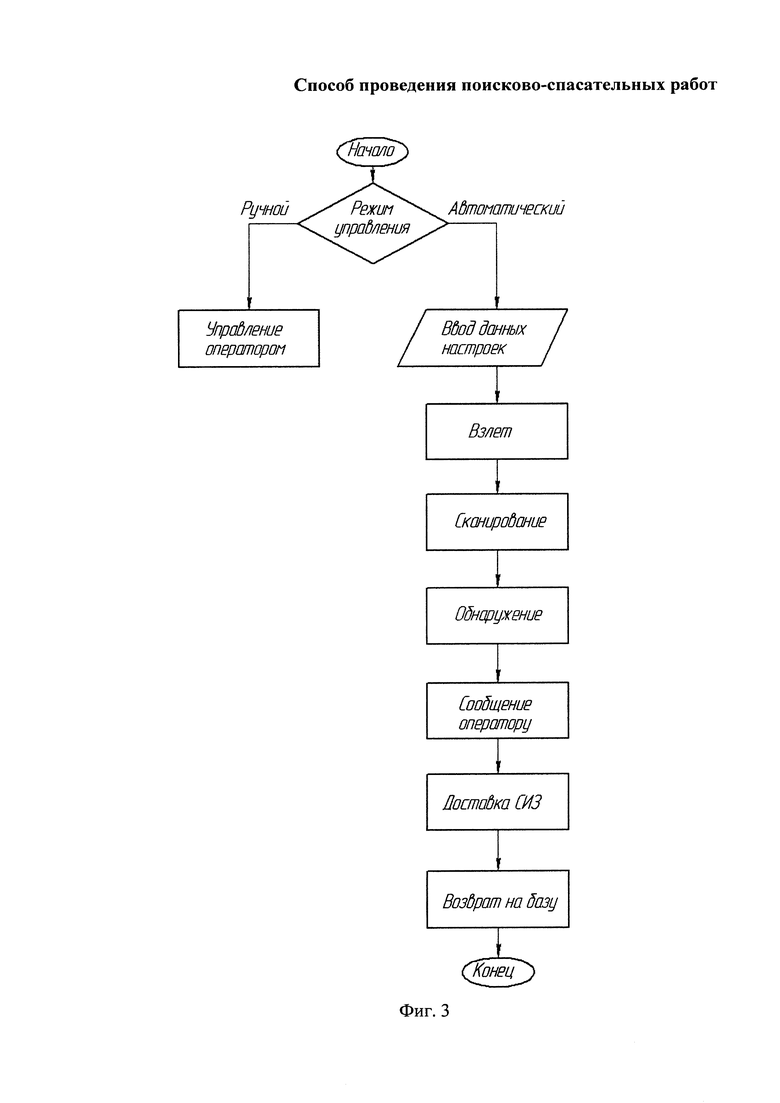
Изобретение поясняется чертежами, где на фиг. 1 показано устройство летательного аппарата, на фиг. 2 - его вид спереди, на фиг. 3 - алгоритм проведения поисково-спасательной операции.
Пример практического осуществления способа
В качестве возвращаемого летательного аппарата 1 (фиг. 1, фиг. 2) используют дистанционно-пилотируемый летательный аппарат вертикального взлета и посадки с изменяемым углом силовых установок. В качестве обмена данными между оператором и беспилотным летательным аппаратом используется радиоретранслятор 10.
Проведение поисково-спасательной операции начинают с того, что оператор командного пункта выбирает режим управления - ручной или автоматический (фиг. 3). В случае автоматического управления оператор осуществляет выделение квадрата на электронной карте для поисково-спасательной деятельности, задает высоту полета, начало координат, направление местности сканирования и шаг сканирования. После включения беспилотного летательного аппарата он производит взлет и направляется в квадрат к началу координат. За точное позиционирование отвечает ГЛОНАСС приемник 2. Выбранная оператором высота полета влияет на глубину сканирования, так как примененный СШПР 3 работает только на расстоянии до 30 метров, соответственно, чем глубже находится пострадавший, тем ниже высота полета беспилотного летательного аппарата. Сканирование может осуществляться как поступательно, так и по кругу, относительно начала координат с заданным шагом сканирования, что является расстоянием между параллельными линиями траектории полета беспилотного летательного аппарата. В ходе сканирования СШПР передатчик посылает сигнал, в случае его попадания в пострадавшего, сигнал отражается и принимается приемником СШПР. Сканирование приостанавливают для отправки сигнала оператору с точными координатами найденного человека, глубины нахождения и информацией о его физическом состоянии, определяемом по разности расстояний вдоха и выдоха грудной клетки. В дополнение к определению места нахождения человека измеряется уровень углекислого газа в атмосфере в месте нахождения пострадавшего с помощью встроенного газоанализатора 4 для определения уровня агрессивности окружающей человека среды. Также посредством цветной видеокамеры 9, инфракрасной видеокамеры 5 и 3D сканера 6 просматривается местность в зоне нахождения пострадавшего. Все полученные данные поступают на микрокомпьютер 7, который обрабатывает их и отправляет на пульт оператора посредством радиокомандной линии управления. Данные, представленные в командном пункте оператора, позволяют поисково-спасательному отряду определить приоритеты спасения, его пути и быстро произвести спасательную операцию.
При автоматическом полете беспилотного летательного аппарата на его пути могут попадаться различные препятствия в виде деревьев, стен. Для их детектирования использован 3D-сканер, сканирующий объемное пространство вокруг беспилотного летательного аппарата, что позволяет облетать препятствия, а инфракрасная камера позволяет определить источники огня и также облететь их.
В ручном режиме пилотирования оператор самостоятельно управляет беспилотным летательным аппаратом из командного пункта, самостоятельно анализируя при этом данные, полученные с детектируемых устройств. При этом оператор в командном пункте видит все то, что видит и детектирует беспилотный летательный аппарат. После того, как был обнаружен пострадавший, на пульте оператора раздается сигнал и выводятся данные о глубине его нахождения, физическом состоянии и окружающей его среде, далее оператор сообщает точные координаты нахождения пострадавшего спасательной группе и переходит в ручной режим управления беспилотным летательным аппаратом для доставления средств индивидуальной защиты и медикаментов для оказания первой медицинской помощи в случае, если пострадавший в сознании и находится на поверхности земли.
Ввиду того, что беспилотный летательный аппарат является аппаратом вертикального взлета и посадки, то доставление полезного груза к пострадавшему осуществляется достаточно точно. После произведенной посадки рядом с пострадавшим в беспилотном летательном аппарате открывается контейнер 8, в котором содержится СИЗ, мобильный телефон для связи со спасателями, а также аптечка первой помощи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2018 |
|
RU2694528C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОТЕРПЕВШЕГО И ТОЧНОЙ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА ДЛЯ НЕГО ПРИ ПРОВЕДЕНИИ ПОИСКОВО-СПАСАТЕЛЬНЫХ ОПЕРАЦИЙ | 2002 |
|
RU2223803C1 |
| СПОСОБ ПОИСКА МАЯЧКОВОЙ СИСТЕМЫ | 2021 |
|
RU2785369C1 |
| СПАСАТЕЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2752769C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СПАСАТЕЛЬНЫХ РАБОТ | 2008 |
|
RU2381959C1 |
| СПОСОБ БЕЗАВАРИЙНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2727044C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| БЕСПИЛОТНОЕ АВИАЦИОННОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОИСКА ЛЮДЕЙ, ТЕРПЯЩИХ ИЛИ ПОТЕРПЕВШИХ БЕДСТВИЕ НА МОРЕ | 2022 |
|
RU2814981C2 |
| СПОСОБ ПРОВЕДЕНИЯ АВАРИЙНО-СПАСАТЕЛЬНЫХ РАБОТ В МОРЕ | 2008 |
|
RU2421370C2 |
Изобретение относится к способам проведения поисково-спасательных работ с помощью авиационных средств. Способ проведения поисково-спасательных работ включает введение перед запуском беспилотного летательного аппарата (БПЛА) координат границ поиска, высоту полета, направление и шаг сканирования. БПЛА, обладающий ГЛОНАС, производит поиск, сканируя территорию при помощи сверхширокополосного радара (СШПР), при этом рассчитывают расстояние между беспилотным летательным аппаратом и обнаруженным пострадавшим, определяют его физическое состояние, устанавливают уровень углекислого газа в атмосфере с помощью газоанализатора. По изображению с инфракрасной видеокамеры определяют источники огня и повышенной температурной опасности. С помощью лазерного 3D сканера определяют местонахождение препятствий, которые необходимо облететь. Данные со всех детектирующих устройств поступают в микрокомпьютер БПЛА и на пульт оператора. При обнаружении человека в области сканирования на пульт оператора подают сигнал и с помощью БПЛА доставляют средства индивидуальной защиты, медикаменты, мобильный телефон. Достигается ускорение и улучшение качества поисково-спасательных работ. 3 ил.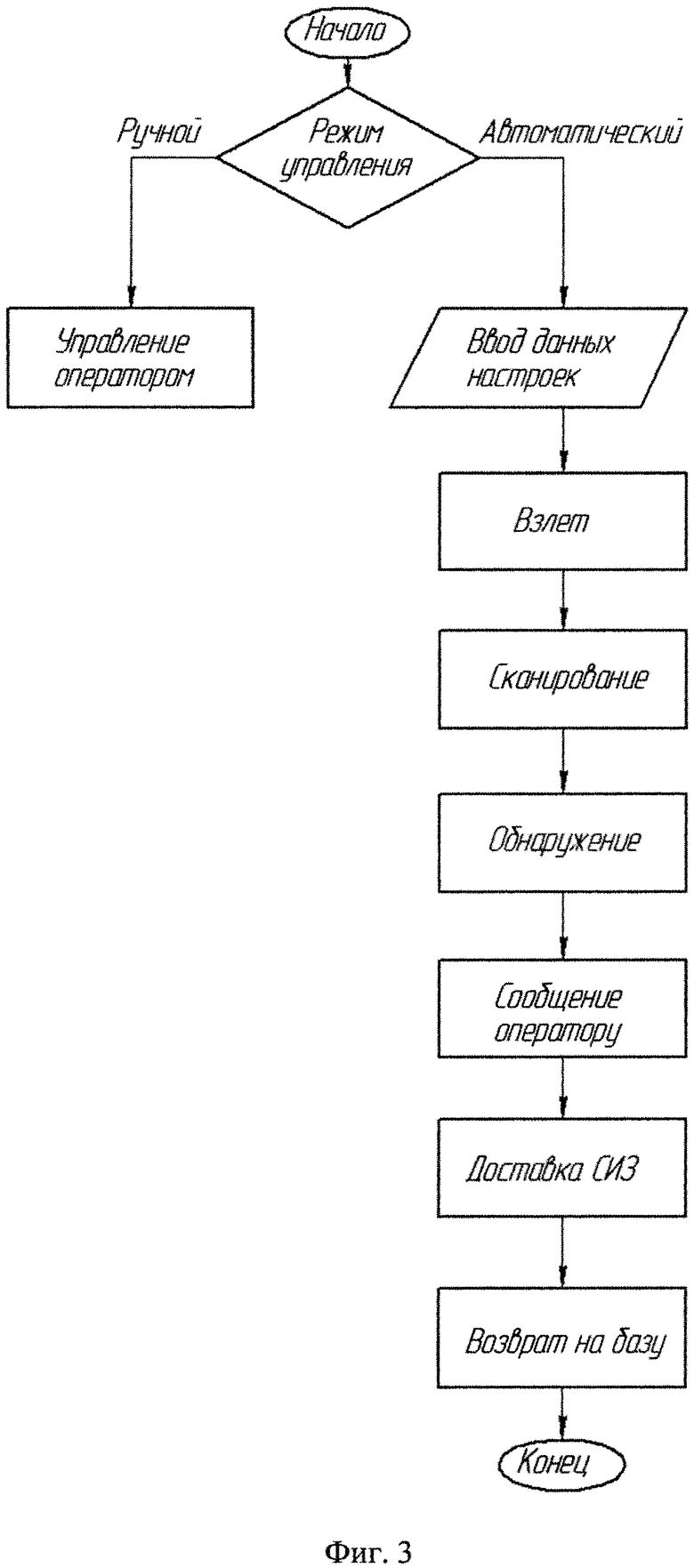
Способ проведения поисково-спасательных работ, заключающийся в запуске беспилотного летательного аппарата для выхода в район бедствия, наведении беспилотного летательного аппарата на место нахождения потерпевшего и выбрасывании с беспилотного летательного аппарата к потерпевшему полезного груза, запускаемый беспилотный летательный аппарат является возвращаемым, при этом полетом беспилотного летательного аппарата управляют с помощью радиокомандной линии управления, а управление им проводят посредством анализа изображения взаимного расположения беспилотного летательного аппарата, несущего полезный груз и потерпевшего, полученного с телевизионной камеры, причем наведением беспилотного летательного аппарата после доставки потерпевшему полезного груза с командного пункта осуществляют возврат возвращаемого беспилотного летательного аппарата, отличающийся тем, что перед запуском беспилотного летательного аппарата оператор задает координаты границ поиска, высоту полета, начало координат, направление сканирования и шаг сканирования, в пределах которых беспилотный летательный аппарат, обладающий ГЛОНАС, производит поисковую деятельность, после запуска беспилотного летательного аппарата он сканирует территорию с определенной оператором высоты, при этом сканирование осуществляют при помощи сверхширокополосного радара (СШПР), обладающего свойством "видеть" через непрозрачные преграды, а также настроенного на отражение посылаемых им сигналов от человека, при этом рассчитывают расстояние между беспилотным летательным аппаратом и пострадавшим, из анализа которого определяют его физическое состояние, устанавливают уровень углекислого газа в атмосфере с помощью установленного в беспилотном летательном аппарате газоанализатора, по изображению с инфракрасной видеокамеры, которой снабжен беспилотный летательный аппарат, определяют источники огня и повышенной температурной опасности, с помощью лазерного 3D сканера, производящего построение трехмерной карты местности, определяют местонахождение препятствий, которые необходимо облететь, данные со всех детектирующих устройств поступают в микрокомпьютер, установленный в составе беспилотного летательного аппарата, одновременно посредством радиоретранслятора их передают на пульт оператора, в случае нахождения пострадавшего человека в области сканирования, в ходе обработки данных с СШПР микрокомпьютером, на пульт оператора подают сигнал и с помощью беспилотного летательного аппарата доставляют средства индивидуальной защиты и медикаменты для оказания первой медицинской помощи в случае, если пострадавший в сознании и находится на поверхности земли, после произведенной посадки рядом с пострадавшим в беспилотном летательном аппарате открывают контейнер, содержащий средства индивидуальной защиты, мобильный телефон для связи с поисково-спасательным отрядом, а также аптечку первой помощи.
| СПОСОБ ОБНАРУЖЕНИЯ ПОТЕРПЕВШЕГО И ТОЧНОЙ ДОСТАВКИ ПОЛЕЗНОГО ГРУЗА ДЛЯ НЕГО ПРИ ПРОВЕДЕНИИ ПОИСКОВО-СПАСАТЕЛЬНЫХ ОПЕРАЦИЙ | 2002 |
|
RU2223803C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СПАСАТЕЛЬНЫХ РАБОТ | 2008 |
|
RU2381959C1 |
| US 2003198364 A1, 23.10.2003 | |||
| US 6056237 A, 02.05.2000. | |||

