ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способам и устройствам для проведения поисково-спасательных работ с помощью беспилотных авиационных систем и может быть использовано для поиска и спасения потерявшихся людей (туристов, грибников и пр.), имеющих при себе мобильный телефон, который в данный момент не подключен к действующей сети связи. Способ может применяться в сложных условиях - горной или лесистой местности, при низкой облачности, тумане, при отсутствии у потерявшихся людей возможности определения своих координат, а также при отсутствии у них прямой связи (радиосвязи) со спасателями.
УРОВЕНЬ ТЕХНИКИ
Известны многочисленные способы поиска и обнаружения потерпевших бедствие или потерявшихся людей при проведении поисково-спасательных операций. Многие из этих способов предусматривают запуск поискового беспилотного воздушного судна (БВС).
В большинстве случаев такие способы предусматривают перед запуском БВС этап предварительного введения координат объекта поиска (ОП). Например, в способе, описанном в патенте РФ № 2698893, координаты ОП считываются с размещенного на ОП блока аварийной связи (GPS-трекера). После прибытия БВС в зону поиска по введенным координатам осуществляется допоиск ОП с помощью телевизионной и инфракрасной видеокамеры с выделением ОП. Аналогичное решение предлагается и в способе, описанном в патенте РФ № 2622505, с той разницей, что допоиск ОП предлагается осуществлять с помощью сверхширокополосного радара.
Особенностью указанных методов является сравнительно малая зона допоиска, связанная с ограниченной дальностью и сложностью обработки телевизионного, инфракрасного или радиолокационного сигнала высокого разрешения на сложном фоне подстилающей поверхности. Поэтому при необходимости поиска ОП на больших площадях необходимо достаточно точное предварительное определение координат.
Недостатком этих способов является необходимость предварительного размещения на ОП блока аварийной связи (GPS-трекера). В ряде публикаций, например, в описании патента РФ № 2379703 «Способ и устройство дистанционного определения местоположения погребенных под обширными завалами людей» в явном виде указывается, что приемопередатчики-ретрансляторы, используемые в качестве радиомаяков и позволяющие идентифицировать ОП, размещаются только на людях, относящихся к группе риска. Однако, в большинстве случаев случайно потерявшиеся люди - туристы или грибники - априорно не относятся к группам риска и поэтому не несут на себе такого блока.
В то же время, статистика показывает, что большинство случайно потерявшихся людей имеют при себе мобильный телефон, хотя и не могут воспользоваться им вне зоны покрытия сотовый сети из-за удаленности или выхода из строя при аварии базовых станций. Поэтому ряд способов используют это обстоятельство для предварительного определения координат ОП. Например, в патенте РФ №181691 предлагается для поисковых и спасательных операций использовать БВС, которое содержит встроенный микропроцессор и соединенные с ним встроенные модуль определения пространственных координат и модуль связи, при этом корпус беспилотного летательного аппарата имеет разъемы, обеспечивающие возможность зарядки его аккумуляторов, и выполнен с возможностью одновременной фиксации и подключения к микропроцессору видеокамеры высокого разрешения, инфракрасной камеры ночного видения, неохлаждаемой тепловизионной камеры, аудиорегистратора направленного действия, сканирующего лидара, модуля обнаружения сигнала сотового телефона, модуля обнаружения пассивного радиочастотного маячка, модуля обнаружения активного лавинного биппера, подповерхностного радиолокатора и био-радиолокатора.
Недостатком такого решения является высокая техническая сложность, большие масса и габариты комплекса поисковой аппаратуры, размещенной на БВС аппаратуры. Для размещения подобной полезной нагрузки требуется БВС очень высокой грузоподъемности, что может сделать эксплуатационные расходы такого БВС крайне высокими, а саму эксплуатацию чрезвычайно сложной.
Тем не менее, следует отметить наличие в комплексе аппаратуры модуля обнаружения сигнала сотового телефона. Из описания патента явно следует, что под модулем обнаружения сигнала сотового телефона имеется в виду система обнаружения радиоустройств по патенту США № 9237422. Данная система, как следует из описания патента, предназначена для определения факта и места излучения радиопередатчика, использующего протокол сотовой связи, причем работать эта система должна внутри здания, а не на обширной местности. Поэтому в данной системе может обнаруживаться сигнал радиоизлучающего телефона, однако, данная система не предусматривает возможности самостоятельно инициировать радиоизлучение обнаруживаемого телефона. Таким образом, с точки зрения применения в поисково-спасательных операциях данная система имеет очень ограниченное применение, а именно: может работать только в тех случаях, когда обнаруживаемый телефон находится в зоне действия работающей базовой станции сотовой связи. Данное условие, как правило, не выполняется на больших территориях, на которых обычно производится поиск пропавших людей, а также может не выполняться в случаях повреждения базовых станций во время аварий при стихийных бедствиях, т.е. именно в то время, когда возникает необходимость в поисково-спасательных операциях.
Существуют технические решения, например, патент РФ 2694528, предлагающие вместо одного универсального БВС, несущего сложный аппаратурный комплекс, и, соответственно, предполагающего высокую грузоподъемность и стоимость эксплуатации, использовать гетерогенную группу БВС различного функционального назначения, в частности, поискового. Данное решение позволяет рационально распределить отдельные задачи операции между специализированными БВС, несущими соответствующее оборудование. Отсюда логично вытекает возможность выделения задачи поиска и предварительного определения координат ОП с помощью БВС, несущего специализированное устройство обнаружения мобильного телефона.
Существуют различные системы и способы для определения местоположения мобильного устройства, описанные, например, в патенте РФ № 2455661, которые подразумевают использование специальных сигналов базовых станций, как физических, так и виртуальных. Эти способы являются вариантами реализации разностно-дальномерного метода пеленгации, обеспечивающего хорошую точность позиционирования. Однако, во всех этих системах и способах местоположение мобильного устройства определяется в точке расположения самого мобильного устройства относительно системы базовых станций (физических или виртуальных). Для внешнего наблюдателя координаты мобильного устройства могут быть определены разностно-дальномерным способом только в случае, если сигнал, излученный мобильным устройством, одновременного принимается системой базовых станций, причем местоположение этих станций точно известно и зафиксировано, а работа их засинхронизирована с высокой точностью. В зонах проведения поисково-спасательных операций эти условия, как правило, не выполняются.
Сходный метод предлагается в системе, описанной в патенте РФ № 2699376. В этом методе применяется одно устройство для инициации излучения мобильного телефона и множество приемных устройств для приема ответного сигнала мобильного телефона.
Недостатком этих способов для применения в поисково-спасательных работах является сложность и долгое время разворачивания многопозиционных систем в зоне поисковых работ, а также практическая нереализуемость размещения аппаратуры на БВС, связанная с необходимостью синхронизации распределенных систем.
Наиболее близким техническим решением, выбранным в качестве прототипа предлагаемого изобретения, является «Способ определения местоположения потерявшегося человека с мобильным устройством» (патент РФ № 2780071).
В этом способе для определения местоположения потерявшегося человека используют предварительно вычисленное определенным образом число N БВС, каждое из которых снабжено портативным имитатором базовой станции, модулем глобального позиционирования с круговой антенной и возможностью триангуляции источника сигнала, приемопередатчиком для организации беспроводной связи между БВС и сети БВС с наземным блоком управления поисково-спасательного пункта (ПСП). Способ предусматривает выполнение следующих операций:
- разворачивают ПСП в районе, максимально приближенном к месту, в котором предположительно потерялся человек;
- запускают N БВС;
- осуществляют облет зоны поиска определенным образом;
- производят поиск сигналов абонентского терминала потерявшегося человека каждым БВС;
- измеряют мощность сигнала для определения близости к ОП;
- дают команды для перемещения в зону поиска двум соседним БВС;
- с помощью двух соседних БВС определяют координаты местоположения ОП;
- координаты ОП передают в ПСП.
Этот способ имеет следующие недостатки:
Во-первых, этот способ требует использования множества БВС, которые должны быть организованы в группу по принципу самоорганизующейся сети, что приводит к большим сложностям в практической реализации, особенно, в случае применения БВС самолетного типа.
Во-вторых, указанный в данном способе поиск мобильного устройства по признаку уровня мощности сигнала является вариантом амплитудного метода пеленгации, который не обеспечивает высокую точность и, соответственно, приводит к расширению зоны дополнительного поиска с помощью других аппаратурных средств. Это обстоятельство увеличивает время, потребное для поиска объекта, и общее время поисково-спасательной операции.
РАСКРЫТИЕ СУЩНОСТИ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Технической задачей, решаемой в предлагаемом изобретении «Способ поисковых и спасательных операций и беспилотное воздушное судно для его осуществления», является упрощение группировки БВС, в пределе, до одного устройства, обеспечивающего обнаружение и определение с высокой точностью местонахождения человека с мобильным телефоном при поисково-спасательных работах на большой площади поиска.
Техническим результатом предлагаемого изобретения является:
- сокращение количества БВС, требуемых для использования в поисково-спасательных операциях;
- отсутствие необходимости построения самоорганизующейся сети БВС и, соответственно, упрощение бортовой аппаратуры БВС;
- повышение точности определения координат ОП и, как следствие, сокращение времени, необходимого на обнаружение ОП.
Заявленный технический результат достигается за счет того, что в предлагаемом способе так же, как и в известном способе, используют БВС, которое имеет на борту аппаратуру в составе блока навигации, блока связи с наземным пунктом управления, а также имитатора базовой станции сети мобильной связи. ПСП разворачивают в районе, максимально приближенном к месту, в котором предположительно потерялся человек - ОП, запускают БВС, осуществляют облет зоны поиска определенным образом, производят поиск сигналов абонентского терминала потерявшегося человека (мобильного телефона) с помощью бортовой аппаратуры БВС, по принятым сигналам определяют координаты местоположения ОП, которые затем передают в ПСП.
В отличие от известного способа, когда применяется группа из нескольких БВС, связанных в самоорганизующуюся сеть, в предлагаемом способе может использоваться единственный БВС.
В известном способе для определения близости к ОП на каждом БВС измеряют мощность принятого сигнала, то есть, используют амплитудный метод пеленгации.
В предлагаемом способе, в отличие от известного, пеленгацию принятого сигнала выполняют фазовым методом, а триангуляцию источника сигнала, а также устранение неоднозначности измерений, осуществляют не за счет использования группы БВС, а за счет смены позиции измерения единственного БВС при полете БВС.
При амплитудном методе пеленгации необходима группа из нескольких БВС для максимального приближения к ОП с целью повышения точности измерения пеленга. Использование фазового метода пеленгации значительно повышает точность измерения пеленга на ОП по сравнению с амплитудным методом пеленгации.
Таким образом, для достижения технического результата используют БВС, который имеет в составе имитатора базовой станции передатчик запросного сигнала и фазовый пеленгатор. Пеленгатор содержит более, чем одну приемную антенну с соответствующим каналом приемника. А приемные антенны разнесены друг относительно друга по поверхности БВС. В процессе облета зоны поиска БВС выполняет несколько (не менее двух) последовательных измерений пеленга на источник обнаруженного сигнала фазовым методом. Причем определение координат источника сигнала осуществляют путем вычисления координат точки пересечения найденных пеленгов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предлагаемый способ проиллюстрирован следующими рисунками:
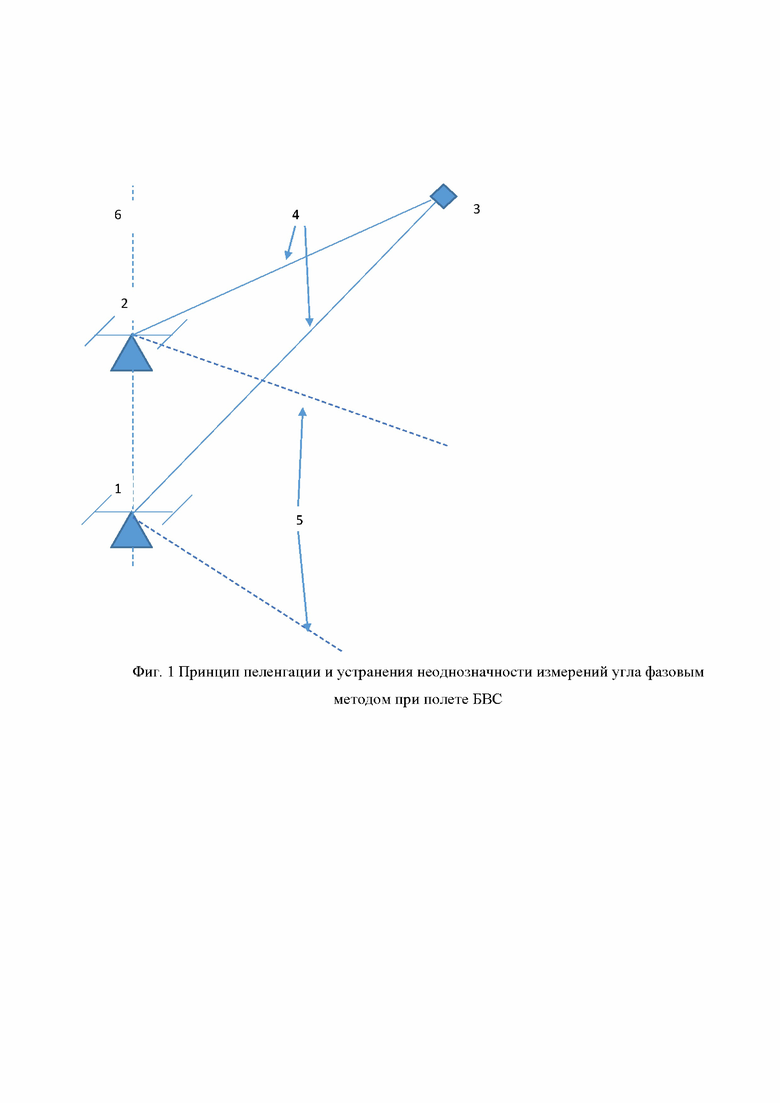
Фиг. 1 - Принцип пеленгации и устранения неоднозначности измерений угла фазовым методом при полете БВС
1 - начальная измерительная позиция БВС с пеленгатором
2 - последующая измерительная позиция БВС с пеленгатором
3 - источник ответного сигнала (телефон)
4 - истинные пеленги на источник ответного сигнала
5 - ложные пеленги на источник ответного сигнала
6 - линия пути БВС
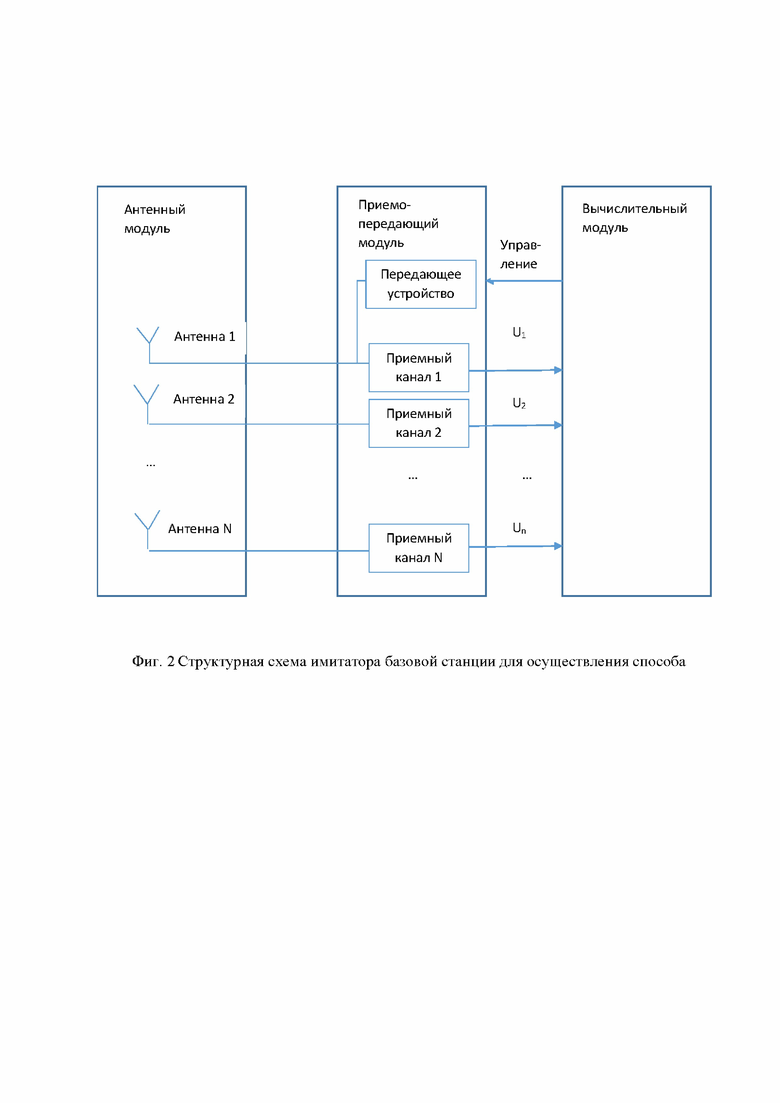
Фиг. 2 - Структурная схема имитатора базовой станции для осуществления способа.
Фиг 3 - Пример возможного конструктивного исполнения имитатора базовой станции.
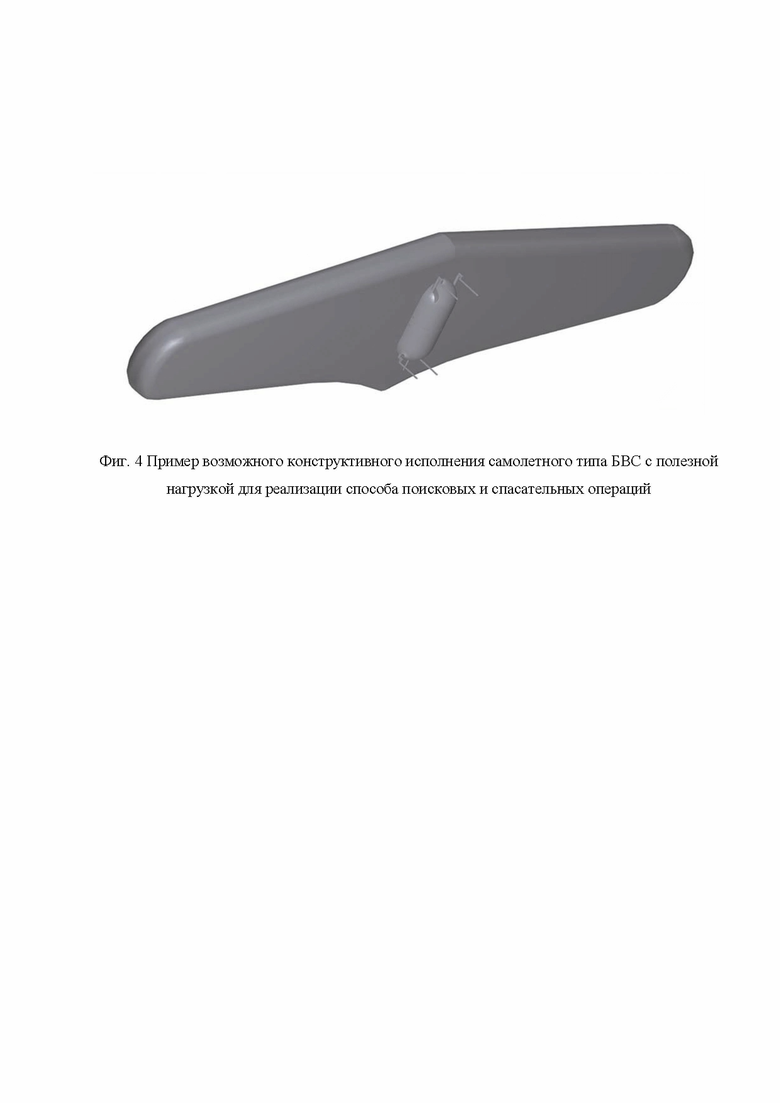
Фиг 4 - Пример возможного конструктивного исполнения самолетного типа БВС с полезной нагрузкой для реализации способа поисковых и спасательных операций.
Одиночное измерение фазовым методом содержит неоднозначность, которую можно устранить, произведя смену позиции измерения. В случае БВС такая смена позиции происходит естественным образом при движении БВС (Фиг.1). Одновременно последовательная смена позиции БВС позволяет по измеренным пеленгам осуществлять измерение координат источника сигнала, для чего в известном методе использовалось одновременная оценка пеленга с нескольких БВС группы.
Для осуществления фазового метода в составе аппаратуры БВС нужно иметь бортовую аппаратуру имитатора базовой станции, содержащую некоторые существенные отличия. Предлагаемый для использования на БВС имитатор базовой станции сети мобильной связи состоит из антенного модуля, приемопередающего модуля и вычислительного модуля. Схема имитатора базовой станции приведена на Фиг.2.
Антенный модуль содержит более, чем одну приемную антенну, причем приемные антенны разнесены друг относительно друга по поверхности БВС. Выход каждой приемной антенны соединен с соответствующим входом канала приемника. Выходы каналов приемника соединены со входами вычислительного модуля, в котором реализуется известный алгоритм фазовой пеленгации сигнала. Частотные диапазоны, используемые в мобильной связи, например, 890-960 МГц и 1710-1880 МГц, позволяют создать компактное антенное устройство из нескольких отдельных антенных элементов, например, несимметричных вибраторов, позволяющее разместить аппаратуру на БВС, например, как показано на Фиг.3.
Фазовый метод пеленгации сам по себе является известным. Применение фазовых пеленгаторов в бортовой (самолетной и вертолетной) аппаратуре также известно. Однако, в известных источниках информации не найдено упоминаний применения фазовой пеленгации в аппаратуре имитаторов базовой станции мобильной связи. Также не найдено упоминаний о применении фазовых пеленгаторов на БВС, предназначенных для поисково-спасательных операций. Таким образом, предлагаемое техническое решение является новым.
Таким образом, предлагаемый способ позволяет использовать одно БВС вместо группы из нескольких БВС, как предусматривалось в известном способе. Отсутствие необходимости в группе БВС является значительным упрощением технической реализации поисково-спасательных работ. Кроме того, составе БВС нет необходимости в аппаратуре беспроводной связи для организации сети между БВС группы, что в свою очередь, упрощает аппаратуру, снижает требования к массе и габаритам полезной нагрузки БВС, позволяет увеличить дальность и время полета БВС.
Отсутствие необходимости в организации сети между несколькими БВС также позволяет реализовать предлагаемый способ с помощью БВС самолетного типа, например, как показано на Фиг.4, что, в свою очередь, позволяет значительно расширить зону возможного поиска и сократить время поисково-спасательных работ, по сравнению со способом, подразумевающим использование БВС квадрокоптерного или мультикоптерного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения потерявшегося человека с мобильным устройством | 2022 |
|
RU2780071C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2018 |
|
RU2694528C1 |
| Способ автоматического обнаружения источника непрерывного излучения одноканальными радиолокационными станциями беспилотных воздушных судов | 2023 |
|
RU2820577C1 |
| Способ нахождения угнанного транспортного средства | 2017 |
|
RU2668770C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| БЕСПИЛОТНОЕ АВИАЦИОННОЕ УЛЬТРАФИОЛЕТОВОЕ СОЛНЕЧНО-СЛЕПОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОИСКА ЛЮДЕЙ, ТЕРПЯЩИХ ИЛИ ПОТЕРПЕВШИХ БЕДСТВИЕ НА МОРЕ | 2022 |
|
RU2814981C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА, ЛЕЖАЩЕГО НА ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2233230C2 |

Изобретение относится к способам и устройствам для проведения поисково-спасательных работ с помощью беспилотных авиационных систем и может быть использовано для поиска и спасения потерявшихся людей, имеющих при себе мобильный телефон, который в данный момент не подключен к действующей сети связи. Используют беспилотное воздушное судно (БВС), которое имеет на борту блок навигации, блок связи с наземным пунктом управления (ПСП), имитатор базовой станции сети мобильной связи, состоящий из антенного устройства, приемопередающего модуля и вычислительного модуля. ПСП разворачивают в районе, максимально приближенном к месту, в котором потерялся человек - объект поиска (ОП), запускают БВС, осуществляют облет зоны поиска определенным образом, производят поиск сигналов абонентского терминала ОП с помощью бортовой аппаратуры БВС, пеленгуют принятый сигнал фазовым методом в серии последовательных измерений, выполняемых при пролете БВС, по полученным пеленгам определяют координаты местоположения ОП, которые затем передают в ПСП. Сокращается количество БВС для поисково-спасательных операций. Упрощается бортовая аппаратура БВС. Повышается точность определения координат ОП, сокращается время поиска. 4 ил.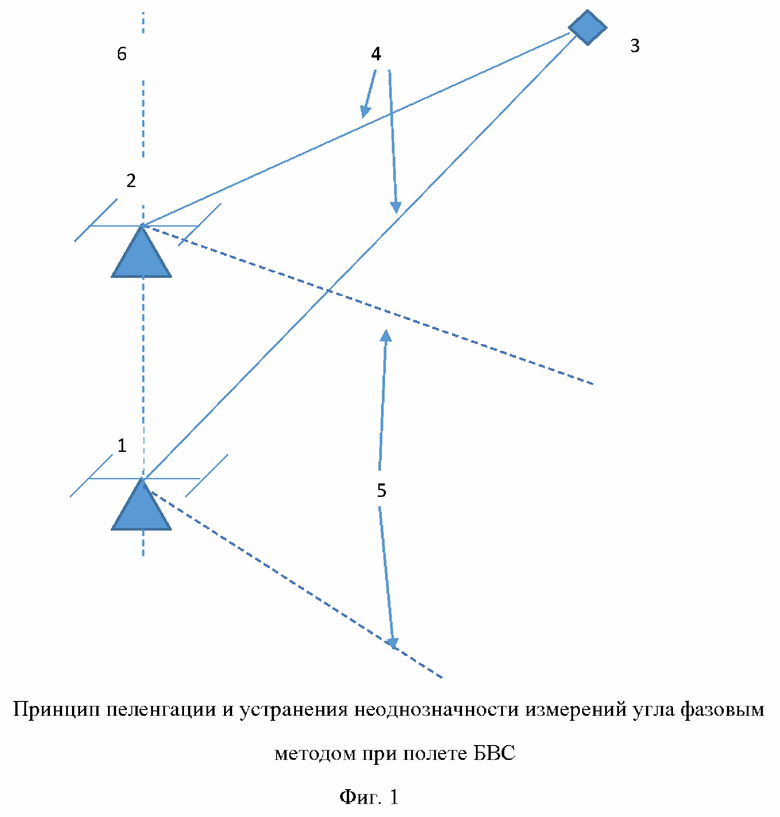
Способ поисковых и спасательных операций с использованием беспилотного воздушного судна (БВС), которое имеет на борту аппаратуру в составе блока навигации, блока связи с наземным пунктом управления (ПСП), имитатора базовой станции сети мобильной связи, заключающийся в том, что ПСП разворачивают в районе, максимально приближенном к месту, в котором предположительно потерялся человек – объект поиска (ОП), запускают БВС, осуществляют облет зоны поиска определенным образом, производят поиск сигналов абонентского терминала потерявшегося человека (мобильного телефона) с помощью бортовой аппаратуры БВС, определяют координаты местоположения ОП, которые затем передают в ПСП, отличающийся тем, что используют БВС, имеющее в составе имитатора базовой станции передатчик запросного сигнала и фазовый пеленгатор, содержащий более чем одну приемную антенну с соответствующим каналом приемника, причем приемные антенны разнесены относительно друг друга по поверхности БВС, в процессе облета зоны поиска выполняют несколько (не менее двух) последовательных измерений пеленга на источник обнаруженного сигнала фазовым методом, а определение координат источника сигнала осуществляют путем вычисления координат точки пересечения найденных пеленгов.
| Способ определения местоположения потерявшегося человека с мобильным устройством | 2022 |
|
RU2780071C1 |
| WO 2016023901 A1, 18.02.2016 | |||
| WO 2009079655 A1, 25.06.2009 | |||
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2018 |
|
RU2694528C1 |
| US 9237422 B1, 12.01.2016 | |||
| 0 |
|
SU181691A1 | |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2016 |
|
RU2622505C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |

