Изобретение относится к железнодорожной технике и применяется для измерения скорости вращения колесной пары и определения направления движения подвижного состава бесконтактным способом.
Наиболее близким техническим решением к заявляемому изобретению является датчик угла поворота, известный из патента РФ 2726287 с датой публикации 29.12.2018, направлен на повышение точности измерения углов поворота и скорости на больших скоростях движения локомотива вплоть до 500 км/час и выше с одновременным повышением надежности. Конструкция датчика выполнена таким образом, чтобы можно было вписаться в посадочные места на буксовом узле подвижного состава. Датчик угла поворота содержит диск с нанесенными на него маркерами, расположенные на кронштейне вихретоковые датчики. Диск жестко закреплен на выступающем торце вала буксы ж/д колеса локомотива. Диск может быть выполнен из диэлектрического материала, маркеры - из токопроводящего материала.
Недостатками данного технического решения являются обязательное наличие в составе датчика микроконтроллера, что повышает вероятность отказа датчика и снижает его надежность, а также невозможность работы датчика при осевых разбегах колесной пары более 4…5 мм, что ограничивает функциональность датчика.
Технической задачей, на решение которой направлено заявляемое изобретение, является разработка датчика угла поворота, который можно разместить в посадочное место на буксовом узле локомотива при упрощении конструкции и повышении надежности.
Технические результаты заключаются в исключении механического контакта между вращающимися и неподвижными частями датчика для повышения его надежности, в возможности увеличить количество каналов измерения, что позволит определить поворот колесной пары на угол, меньший, чем у существующих датчиков, тем самым повысить точность измерения для использования, например, в системах определения нарушения сцепления колес с рельсом. Повышение разрешающей способности датчика выполнено за счет возможности вывода сигнала в синусоидальной форме, в этом случае измерение скорости выполняется не только после прохождения токопроводящей пластины или зуба около измерительной катушки датчика, но и в процессе их прохождения относительно катушки.
Дополнительными техническими результатами следует отметить компактность расположения элементов в датчике за счет использования измерительной катушки в виде многослойной печатной платы, что обеспечивает высокую степень соответствия характеристик катушек, тем самым обеспечивается сходимость результатов измерений, т.е. близость друг к другу результатов измерений угла поворота, выполненных разными датчиками в одинаковых условиях.
Технические результаты достигаются за счет реализации датчика угла поворота, содержащего модулятор цилиндрической формы и неподвижный узел, состоящий из корпуса с кронштейнами, на которых расположены измерительные катушки, представляющие собой вихретоковый датчик. Модулятор выполнен из электроизолирующего материала с расположением по внешнему диаметру от 24 до 180 токопроводящих пластин или в форме зубчатого колеса из токопроводящего материала от 24 до 180 зубьями фасонного профиля. Датчик угла поворота содержит, по меньшей мере, две измерительные катушки (четное количество), выполненные в виде многослойных печатных плат. При этом, каждая катушка расположена около модулятора на радиальном расстоянии 1-5 мм от наружного диаметра модулятора и соединена выводами с модулем обработки сигнала, выполненным в виде печатной платы.
Неподвижный узел выполнен с возможностью крепления на крышке буксового узла, также может выполнять функцию крышки буксового узла.
Модулятор цилиндрической формы предназначен для жесткого крепления соосно на торце оси колесной пары и находится внутри корпуса буксового узла подвижного состава.
Датчик угла поворота дополнительно может иметь возможность вывода сигнала синусоидальной формы для повышения разрешающей способности датчика. Для этого используется модуль цифровой обработки. В этом случае измерение скорости выполняется в момент прохождения токопроводящей пластины или зуба около измерительной катушки датчика, но и в процессе их прохождения относительно катушки, а именно непрерывно в любом положении их относительно катушки.
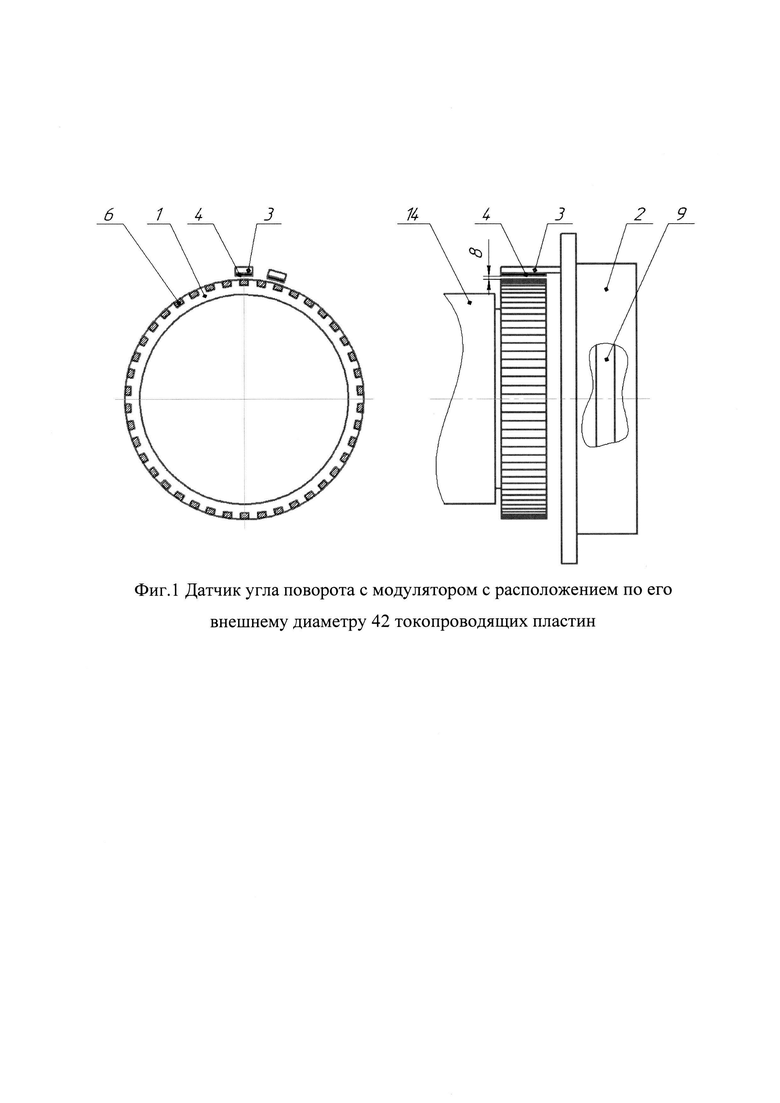
На фиг. 1 показан датчик угла поворота с модулятором цилиндрической формы из электроизолирующего материала с токопроводящими пластинами.
1 - модулятор
2 - неподвижный узел (корпус датчика)
3 - кронштейн катушки измерительной
4 - измерительные катушки вихретокового датчика
6 - пластины токопроводящие
8 - радиальное расстояние между вращающимися и неподвижными частями датчика составляющее величину 1…5 мм.
9 - модуль обработки сигнала
14 - ось колесной пары
На фиг. 2 показан датчик угла поворота с модулятором в форме зубчатого колеса.
1 - модулятор
2 - неподвижный узел (корпус датчика)
3 - кронштейн катушки измерительной
4 - измерительные катушки вихретокового датчика
7 - зубья
8 - радиальное расстояние между вращающимися и неподвижными частями датчика, составляющее величину 1…5 мм.
9 - модуль обработки сигнала
14 - ось колесной пары
На фиг. 3 показан датчик угла поворота с восемью каналами измерения.
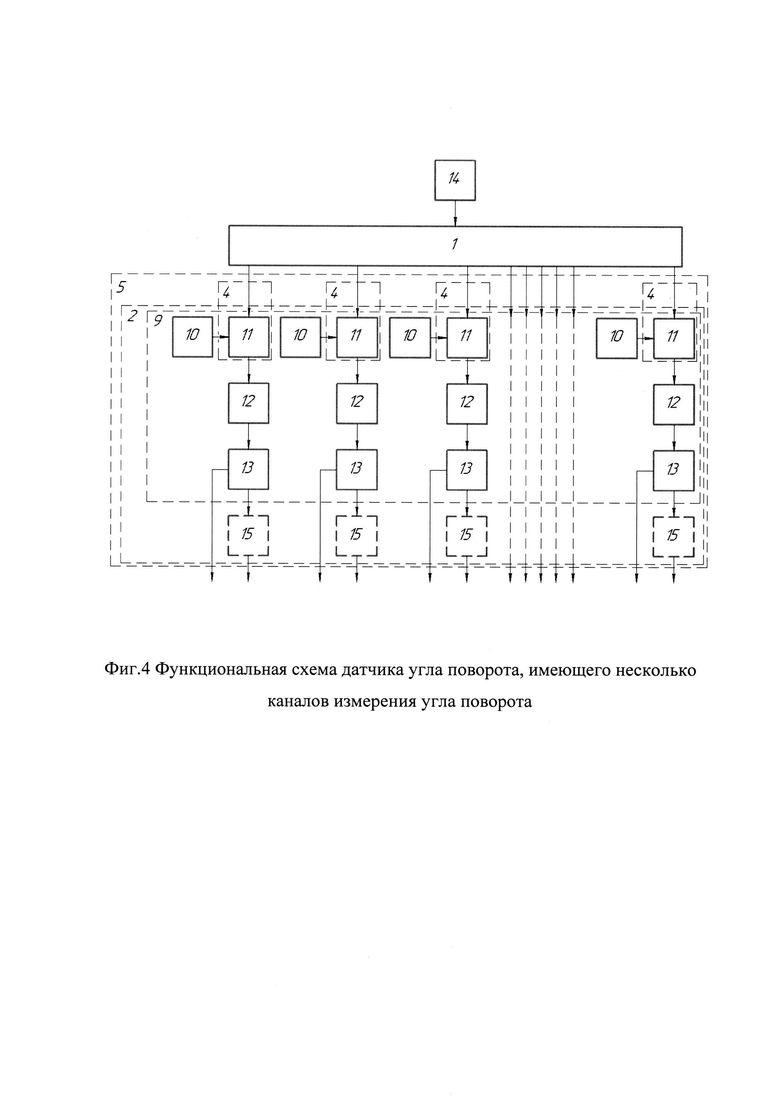
На фиг. 4 приведена функциональная схема датчика угла поворота, имеющего несколько каналов измерения угла поворота.
1 - модулятор
2 - неподвижный узел (корпус датчика)
4 - измерительные катушки вихретокового датчика
5 - вихретоковый датчик
9 - модуль обработки сигнала
10 - ВЧ-генератор
11 - LC-контур
12 - детектор
13 - формирователь импульсов
14 - ось колесной пары
15 - модуль цифровой обработки сигнала (для отдельных исполнений датчика)
Датчик угла поворота содержит модулятор 1 цилиндрической формы и неподвижный узел 2, состоящий из кронштейна 3, на котором расположены измерительные катушки 4 вихретокового датчика 5. На фигуре 1 модулятор 1 выполнен с расположением по внешнему диаметру от 24 до 180 токопроводящих пластин 6 равной ширины. На фигуре 2 модулятор 1 оснащен от 24 до 180 зубьями 7 фасонного профиля. Датчик угла поворота содержит, по меньшей мере, две (4, 6, 8 … четное количество) измерительные катушки 4, выполненные в виде многослойных печатных плат. При этом каждая катушка 4 расположена около модулятора 1 на радиальном расстоянии (поз. 8) 1-5 мм от наружного диаметра модулятора 1 и соединена выводами с модулем 9 обработки сигнала, выполненным в виде печатной платы. Одна катушка измерительная 4, взаимодействующая с модулятором 1 и подключенная к модулю 9 обработки сигнала, образуют канал измерения вихретокового датчика 5, в датчике угла поворота может быть два (4, 6, 8 … четное количество) канала измерения.
Неподвижный узел 2 датчика угла поворота выполнен в форме корпуса, закрепленного на крышке буксового узла или служит в качестве крышки корпуса буксового узла подвижного состава. Неподвижный узел 2 датчика угла поворота располагается соосно колесной паре и модулятору 1.
Модуль 9 обработки сигнала размещен в пыле- и влагозащищенном корпусе (неподвижный узел 2) датчика угла поворота.
Кроме того, модуль 9 обработки сигнала включает в себя ВЧ-генератор 10, LC-контур 11, детектор 12, формирователь 13 импульсов. Также в состав LC-контура 11 входят измерительные катушки 4. Датчик угла поворота может дополнительно содержать модуль 15 цифровой обработки сигнала.
Увеличение количества каналов измерения позволяет определить поворот колесной пары на угол, меньший, чем у существующих датчиков, тем самым повысить точность измерения для использования за счет того, что вихретоковый датчик 5 может иметь от двух до восьми измерительных катушек 4, входящих в состав идентичных каналов измерения, связанных попарно между собой. Причем, в каждой паре каналов сигналы сдвинуты между собой на угол, соответствующий по времени четверти периода следования импульсов. Период следования определяется скоростью вращения колесной пары.
Датчик угла поворота работает следующим образом.
Измерение угла поворота происходит в результате периодического изменения добротности измерительного LC-контура 11 в процессе вращения модулятора 1, закрепленного на торце оси колесной пары 14.
По окружности модулятора 1 расположены от 24 до 180 электропроводящих пластины 6 или от 24 до 180 зубца 7 фасонного профиля, перемещающиеся относительно измерительной катушки 4 с зазором 1…5 мм, изменение добротности измерительного LC-контура 11 вызывается потерями на вихревые токи в электропроводящих элементах модулятора 1.
Помимо основной схемы обработки сигнала, датчик угла поворота может дополнительно содержать в себе модуль цифровой обработки сигнала 15 или иметь возможность соединения с внешним модулем цифровой обработки сигнала, при этом выходной аналоговый сигнал представляет собой синусоиду с частотой, равной частоте следования токопроводящих пластин 6 или зубцов 7 модулятора 1.
В модуле обработки сигнала 9 в результате изменения добротности при подаче сигнала ВЧ-генератором 10 на выходе измерительного LC-контура 11 формируется амплитудно-модулированный ВЧ-сигнал, который подается на детектор 12, при этом частота амплитудной модуляции соответствует частоте следования токопроводящих пластин 6 или зубцов 7 модулятора 1.
После прохождения детектора 12 полученный НЧ-сигнал обрабатывается тремя фильтрами формирователя 13, на выходе которого формируется синусоидальный сигнал с частотой, равной частоте следования токопроводящих пластин 6 или зубцов 7 модулятора 1, при этом в процессе фильтрации существенно ослабляется аддитивная компонента сигнала с частотой вращения оси колесной пары 14, образующаяся при периодических изменениях величины радиального расстояния 8, обусловленных эксцентриситетом наружной поверхности модулятора 1, содержащей токопроводящие пластины 6 или зубцы 7.
Дополнительно для определения скорости движения в системах безопасности подвижного состава на выходе формирователя 13 можно получить прямоугольные импульсы, следующие с частотой, соответствующей частоте прохождения токопроводящих пластин 6 или зубцов 7 модулятора 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КОЛЁСНЫХ ПАР ВАГОНОВ | 2020 |
|
RU2744644C1 |
| УСТРОЙСТВО МОНИТОРИНГА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2016 |
|
RU2627959C1 |
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР С ИСПОЛЬЗОВАНИЕМ ВИХРЕТОКОВЫХ ДАТЧИКОВ | 2021 |
|
RU2772075C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПРОСКАЛЬЗЫВАНИЯ КОЛЕСНЫХ ПАР ПРИ ТОРМОЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2021 |
|
RU2770941C1 |
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| ПОСТ КОМПЛЕКСНОГО КОНТРОЛЯ ДЕФЕКТОВ БУКСОВЫХ УЗЛОВ И КОЛЕС ДВИЖУЩИХСЯ ВАГОНОВ | 2014 |
|
RU2578005C1 |
| Устройство измерения частоты вращения колеса железнодорожного транспорта, статичный и подвижный узлы устройства | 2018 |
|
RU2688245C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| Миниатюрный измеритель параметров электризации космических аппаратов с микросистемным вибрационным модулятором электрического поля | 2018 |
|
RU2695111C1 |


Изобретение относится к области измерения скорости вращения колесной пары. Датчик угла поворота содержит модулятор в виде диска из электроизолирующего материала и неподвижный узел, состоящий из кронштейна, на котором расположен вихретоковый датчик. Модулятор выполнен с расположением по внешнему диаметру от 24 до 180 токопроводящих пластин или выполнен в форме зубчатого колеса из токопроводящего материала и оснащен от 24 до 180 зубьями фасонного профиля. Кроме того, вихретоковый датчик представляет собой по меньшей мере две измерительные катушки, выполненные в виде многослойных печатных плат, при этом каждая катушка расположена около модулятора на радиальном расстоянии 1-5 мм от наружного диаметра модулятора и соединена выводами с модулем обработки сигнала, выполненным в виде печатной платы. Технический результат – повышение точности измерения скорости вращения колесной пары, повышение надежности датчика угла поворота. 5 з.п. ф-лы, 4 ил.
1. Датчик угла поворота, содержащий модулятор в виде диска из электроизолирующего материала и неподвижный узел, состоящий из кронштейна, на котором расположен вихретоковый датчик, отличающийся тем, что модулятор выполнен с расположением по внешнему диаметру от 24 до 180 токопроводящих пластин или выполнен в форме зубчатого колеса из токопроводящего материала и оснащен от 24 до 180 зубьями фасонного профиля, кроме того вихретоковый датчик представляет собой по меньшей мере две измерительные катушки, выполненные в виде многослойных печатных плат, при этом каждая катушка расположена около модулятора на радиальном расстоянии 1-5 мм от наружного диаметра модулятора и соединена выводами с модулем обработки сигнала, выполненным в виде печатной платы.
2. Датчик угла поворота по п. 1, отличающийся тем, что измерительная катушка является частью LC-контура вихретокового датчика.
3. Датчик угла поворота по п. 1, отличающийся тем, что модуль аналоговой обработки сигнала содержит высокочастотный генератор, измерительные катушки с LC-контуром, представляющие собой вихретоковый датчик, детектор, формирователь импульсов с тремя фильтрами, развязку для потребителей сигнала.
4. Датчик угла поворота по п. 1, отличающийся тем, что дополнительно содержит модуль цифровой обработки.
5. Датчик угла поворота по п. 1, отличающийся тем, что выполнен с возможностью соединения с внешним модулем цифровой обработки.
6. Датчик угла поворота по п. 1, отличающийся тем, что выполнен с возможностью передачи сигнала прямоугольной формы для систем определения скорости движения подвижного состава.
| ДАТЧИК УГЛА ПОВОРОТА | 2018 |
|
RU2726287C1 |
| US 2018328761 A1, 15.11.2018 | |||
| DE 102012202639 A1, 22.08.2013 | |||
| Датчик угловых перемещений | 1979 |
|
SU1060935A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА ШТУЧНЫХ ГРУЗОВ | 0 |
|
SU175874A1 |

