Заявляемое изобретение относится к автоматизированным ультразвуковым и вихретоковым комплексам неразрушающего контроля колесных пар вагонов рельсового транспорта и может быть использовано в области неразрушающего контроля колесных пар грузовых, пассажирских вагонов, тягового и мотор-вагонного железнодорожного подвижного состава, вагонов метрополитена, трамвая, рельсовых автобусов и др.
Заявляемое изобретение направлено на повышение достоверности и производительности автоматизированного обнаружения поверхностных и внутренних дефектов (неоднородности и несплошности) любой ориентации во всех конструктивных элементах колесных пар вагонов с неподвижно закрепленными цельнокатаными колесами с плоскоконической или криволинейной формой дисков на сплошных или полых осях, с тормозными дисками и без них; с установленным буксовыми узлами с закрытой или снятой крышкой буксового узла; с частично демонтированными буксовыми узлами и внутренними кольцами подшипников, напрессованными на шейки оси или голыми шейками оси.
Заявляемое изобретение предназначено для контроля колесных пар вагонов при их производстве, ремонте (текущем, среднем, капитальном), профилактическом контроле после определенного пробега колесной пары. Изобретение эффективно при его использовании в условиях ограниченного пространства вагоноремонтных предприятий.
Как известно специалисту из данной области техники, конструкция колесных пар с неподвижно закрепленными цельнокатаными колесами на сплошных и полых осях, с тормозными дисками и без тормозных дисков, а также конструкция их элементов строго регламентированы соответствующими федеральными и отраслевыми нормативными документами, например, ГОСТ 4835, ГОСТ 33200, ГОСТ 10791 и т.д. Зоны контроля колесных пар, как правило, установлены соответствующими нормативными документами, например, РДВНИИЖТ 27.05.01-2017, ПР НК В.2-2019, СТО ФПК1.11.004-2012, ПТЭ метрополитенов РФ и т.д.
На Фиг. 1а приведен пример конструкции вагонной колесной пары, с двумя колесами, жестко закрепленными на сплошной оси с тремя тормозными дисками. Конструкция колесной пары содержит следующие элементы: 1 - ось (сплошная), 2 - средняя часть оси, 3 - шейка оси, 4 - торец оси, 5 - два цельнокатаных колеса, 6 - обод, колеса, 7 - диск колеса (плоскоконической формы), 8 - ступица колеса, 9 - наружный торец ступицы колеса, 10 - внутренний торец ступицы колеса, 11 - гребень колеса, 12 -поверхность катания обода колеса, 13 - наружная боковая сторона обода колеса, 14 - внутренняя боковая сторона обода колеса, 15 - приободная зона с наружной стороны колеса, 16 - приободная зона с внутренней стороны колеса, 17 - средняя часть диска колеса с наружной стороны, 18 - средняя часть диска колеса с внутренней стороны, 19 - переход от диска колеса к ступице колеса с наружной стороны, 20 - переход от диска колеса к ступице колеса с внутренней стороны, 21 - предподступичная часть оси, 22 -подступичная часть оси, 23 - тормозные диски.
На Фиг. 1б приведен пример конструкции вагонной колесной пары, с двумя колесами, жестко закрепленными на полой оси без тормозных дисков. Конструкция колесной пара содержит следующие элементы: 2 - средняя часть оси, 3 - шейка оси, 4 - торец оси, 5 - два цельнокатаных колеса, 6 -обод колеса, 8 - ступица колеса, 9 - наружный торец ступицы колеса, 10 - внутренний торец ступицы колеса, 11 - гребень колеса, 12 - поверхность катания обода колеса, 13 - наружная боковая сторона обода колеса, 14 -внутренняя боковая сторона обода колеса, 15 - приободная зона снаружной стороны колеса, 16 - приободная зона с внутренней стороны колеса, 17 -средняя часть диска колеса с наружной стороны, 18-средняя часть диска колеса с внутренней стороны, 19 - переход от диска колеса к ступице с наружной стороны, 20 - переход от диска колеса к ступице с внутренней стороны, 21 - предподступичная часть оси, 22 - подступичная часть оси, 24 -ось (полая), 25 - диск колеса (криволинейной формы), 26 - центральное отверстие полой оси.
На Фиг. 2 представлены примеры различных комплектаций колесной пары.
Фиг. 2а - приведен пример конструкции колесной пары без тормозных дисков с установленным буксовыми узлами с закрытой крышкой буксового узла со сплошной осью и плоскоконической формой диска колеса, где: 1 - ось (сплошная), 2 - средняя часть оси, 5 - цельнокатаные колеса, 7 - диск колеса (плоскоконической формы), 27 - буксовый узел, 28-крышка буксового узла (закрыта).
Фиг. 2б - приведен пример конструкции колесной пары без тормозных дисков с установленными буксовыми узлами со снятыми крышками буксовых узловсо сплошной осью и плоскоконической формой диска колеса, где: 1 - ось (сплошная), 2 - средняя часть оси, 5 - цельнокатаные колеса, 7 -диск колеса (плоскоконической формы), 27 - буксовый узел (крышка 28 буксового узла снята).
Фиг. 2в - приведен пример конструкции колесной пары без тормозных дисков с частично демонтированными буксовыми узлами с внутренними кольцами подшипников, напрессованными на шейки оси со сплошной осью и плоскоконической формой диска колеса, где: 1 - ось (сплошная), 2 - средняя часть оси, 5 - цельнокатаные колеса, 7 - диск колеса (плоскоконической формы), 29 - внутренние кольца подшипников.
Фиг. 2г - приведен пример конструкции колесной пары без тормозных дисков с голыми шейками оси со сплошной осью и криволинейной формой диска колеса, где: 1 - ось (сплошная), 2 - средняя часть оси, 5 - цельнокатаные колеса, 3 -шейка оси (голая), 25 - диск колеса (криволинейной формы).
Фиг. 2д - приведен пример конструкции колесной пары без тормозных дисков на полой оси с голыми шейками оси с полой осью и криволинейной формой диска колеса, где: 2 - средняя часть оси, 3 - шейка оси (голая), 5 -цельнокатаные колеса, 24 - ось (полая), 25 - диск колеса (криволинейной формы), 26 - центральное отверстие полой оси.
Приведенные выше примеры вариантов конструкции колесной пары не являются исчерпывающими. Возможны также другие варианты различных комплектаций колесной пары с различными комбинациями ее элементов конструкции: с цельнокатаными колесами с плоскоконической или криволинейной формой дисков колеса; со сплошными или полыми осями; с установленным буксовыми узлами с закрытой или снятой крышкой буксового узла; с частично демонтированными буксовыми узлами и внутренними кольцами подшипников, напрессованными на шейки оси или голыми шейками оси.
Колесная пара является одной из самых нагруженных и ответственных деталей вагона, от исправной работы которой зависит безопасность перевозок, осуществляемых рельсовым транспортом. Результаты компьютерного моделирования разрушения колесной пары, стендовые прочностные испытания колесных пар и анализ статистики крушения поездов показали необходимость выявления зарождающихся и мелких поверхностных дефектов в виде несплошностей элементов конструкции колесной пары, так как именно их наличие и несвоевременное выявление, как показал опыт эксплуатации, приводит к разрушению колесной пары и катастрофическим последствиям в виде, например, сходов или крушения подвижных составов.
В Российской Федерации и за ее границами применяются колесные пары со сплошными и полыми осями. Полые оси имеют ряд преимуществ, так как позволяют обеспечить существенное снижение веса колесной пары, что позволяет либо увеличить массу полезного груза при перевозке, либо снизить расход энергии на перевозку полезного груза.
Для выявления зарождающихся и мелких поверхностных дефектов колесной пары целесообразно использовать вихретоковые и магнитопорошковый неразрушающие методы контроля. (Клюев В.В., Соснин Ф.Р., Ковалев А.В. Неразрушающий контроль и диагностика: справочник, под общ. ред. В.В. Клюева, М, Спектр, 2005, 656 с.)
Традиционно, согласно нормативно-технической документации по ремонту колесных пар вагонов, для выявления поверхностных дефектов оси колесной пары используется магнитопорошковый метод контроля, например, РД 32.159-2000 «Магнитопорошковый метод неразрушающего контроля деталей вагонов».
Для контроля оси колесной пары магнитопорошковым методом в технологическом процессе ремонта колесной пары на вагоноремонтных предприятиях требуется дополнительное оборудование, а иногда и организация отдельного поста, который увеличивает площадь позиции неразрушающего контроля вагоноремонтного предприятия.
На посту магнитопорошкового контроля колесной пары в депо происходит намагничивание открытых частей оси колесной пары, после чего колесную пару поливают жидкой магнитной суспензией или посыпают магнитным порошком. В местах поверхностных дефектов оси колесной пары образуется индикаторный след, представляющий собой интенсивное скопление магнитных частиц.
Наличие поверхностного дефекта оси колесной пары определяется оператором визуально по наличию индикаторного следа, а глубину обнаруженного дефекта по индикаторному следу определить невозможно. Ввиду этих и других причин, магнитопорошковый метод плохо поддается автоматизации, трудно реализуем при контроле поверхности центрального отверстия полых осей, а на достоверность магнитопорошкового контроля существенно влияет человеческий фактор.
Нормативной документацией, например, ПР НК В.2-2019, для определения поверхностных дефектов оси и внутренних колец подшипников, напрессованных на шейки оси колесной пары, допускается вместо магнитопорошкового контроля, использовать вихретоковый контроль, в случае применения автоматизированных средств неразрушающего контроля.
Специалисту в данной области техники известно, что согласно нормативно-технической документации (ПР НК В.2-2019) по ремонту колесных пар вагонов, для выявления поверхностных дефектов на поверхности катания колеса при проведении неразрушающего контроля колесной пары используется ультразвуковой метод контроля, заключающийся в прозвучивании объекта контроля поверхностными акустическими волнами.
Ультразвуковой метод контроля позволяет выявлять преимущественно внутренние и глубокие поверхностные дефекты объекта контроля, причем они уверенно выявляются тогда, когда их ориентация перпендикулярна направлению распространения акустической волны ультразвукового преобразователя. Если дефекты ориентированы вдоль линии распространения акустической волны, вероятность их обнаружения существенно снижается.
Известны, автоматизированные установки для ультразвукового контроля колесных пар грузовых вагонов:
- патент РФ на полезную модель №84565 «Комплекс для контроля колесных пар грузовых вагонов», выданный на имя ОАО «Российские железные дороги», г. Москва, дата приоритета 03.02.2009;
- патент РФ на полезную модель №39954 «Стенд для ультразвукового контроля колесных пар», выданный на имя ЗАО «АЛТЕК», Санкт-Петербург, дата приоритета 31.03.2004;
- патент РФ на изобретение №2289128 «Автоматизированная установка для дефектоскопии колесных пар вагонов», выданный на имя Горделия Виталия Ивановича, г. Москва, дата приоритета 07.06.2007.
Все три автоматизированные установки позволяют проводить контроль колесной пары, но реализуют только ультразвуковой метод контроля, что не исключает необходимости наличия на вагоноремонтном предприятии других обязательных методов неразрушающего контроля - поста магнитопорошкового контроля оси и поста вихретокового контроля колес и тормозных дисков (при наличии).
Для выявления зарождающихся и мелких поверхностных дефектов колесной пары (типа несплошностей или трещин) более эффективным является вихретоковый метод контроля.
Из уровня техники известны устройства вихретокового неразрушающего контроля поверхностных дефектов объекта контроля с использованием гибких многоэлементных вихретоковых преобразователей:
- патент РФ на полезную модель №154467 «Устройство вихретокового неразрушающего контроля», дата приоритета 17.02.2015, опубликован 27.08.2015.
Технический результат, обеспечиваемый данной полезной моделью, заключается в обеспечении плотного прилегания устройства вихретокового неразрушающего контроля к поверхности контролируемого изделия с целью повышения точности измерений при проведении контроля.
Устройство вихретокового неразрушающего контроля по указанной полезной модели содержит зондовый мат и опорный элемент, выполненные гибкими, между которыми установлены измерительный блок и матрица вихретоковых преобразователей в виде обмоток возбуждения, представляющих собой плоские витки, гибкую подложку, расположенную над опорным элементом с возможностью отделения от него, согласно полезной модели гибкая подложка выполнена в виде металлической сетки, при этом зондовый мат и опорный элемент выполнены из плотной ткани. Применение над опорным элементом металлической сетки позволяет обеспечить лучшее прилегание устройства вихретокового неразрушающего контроля к поверхности контролируемого изделия, что необходимо при проведении неразрушающего контроля поверхностей сложного профиля. При этом металлическая сетка обеспечивает поддержку конструкции за счет необратимой пластической деформации металлической сетки, причем осуществляемой вручную, и придания ей устойчивой формы, в точности соответствующей форме контролируемой поверхности. При использовании устройства вихретокового неразрушающего контроля для контроля других поверхностей, металлическая сетка может быть вручную выправлена, после чего ей можно придать другую форму.
В указанной полезной модели описана структура многоэлементных вихретоковых преобразователей в виде многослойной структуры. Основным недостатком описанной полезной модели является то, что катушки вихретоковых преобразователей и разделительный материал подготовлены к соединению вместе с применением разнородных технологий (катушка - это провод, а разделительный материал -это плотная ткань), что не позволяет изготовить многоэлементный вихретоковый преобразователь с большим количеством элементов или со сложной структурой, которые необходимы для проведения одновременного контроля всей поверхности объектов контроля сложной формы, имеющих большое количество зон контроля, каковыми являются вагонные колесные пары.
Кроме того, в данной полезной модели позиционирование вихретокового преобразователя относительно объекта контроля производится вручную, что не позволяет использовать вихретоковый преобразователь в автоматизированных установках неразрушающего контроля.
Из уровня техники известны устройства вихретокового неразрушающего контроля поверхностных дефектов контролируемых объектов с использованием гибких многоэлементных вихретоковых преобразователей, изготовленных по интегральной технологии:
- патент США, US №5,659,248, «Многослойный массив вихретоковых преобразователей для полного покрытия контролируемой поверхности без механического сканирования», опубликованный 19 августа 1997.
- патент Китая, CN №109030622 «Массив высокочувствительных гибких вихретоковых преобразователей и способ контроля с применением его», опубликованный 18.12.2018.
В патентах США, US №5,659,248 и Китая, CN №109030622 описаны способы и устройства вихретокового контроля поверхностных дефектов контролируемых объектов с применением гибких матричных многоэлементных вихретоковых преобразователей, изготовленных по интегральной технологии с применением средств фотолитографии, позволяющих одновременно производить контроль большого количества зон объекта контроля сложной формы. В указанных патентах США и Китая раскрыто применение только абсолютных вихретоковых преобразователей. Абсолютные вихретоковые преобразователи, чувствительны к поверхностным дефектам типа трещина, а также имеют недостаток, связанный с тем, что погрешность проводимых с помощью них измерений, в серьезной степени зависит от разброса электромагнитных свойств материала, из которого изготовлен объект контроля, что негативно влияет на точность проводимых с помощью них измерений и, как следствие, негативно влияет на достоверность контроля.
Кроме того, изменение зазора между абсолютным вихретоковым преобразователем и поверхностью объекта контроля, вызванное ее загрязнением, или неравномерной толщиной нанесенного на нее покрытия, грубостью или шероховатостью ее поверхности, приводит к появлению ложных сигналов вихретокового преобразователя, что также снижает достоверность контроля.
Поэтому оба этих фактора ограничивают применение абсолютных вихретоковых преобразователей при неразрушающем контроле объектов, изготовленных из ферромагнитных материалов, например, стали и имеющих грубую, шероховатую или загрязненную поверхность, каковыми являются вагонные колесные пары с большим пробегом.
Из уровня техники известны многоэлементные гибкие вихретоковые преобразователи, предназначенные для обнаружения поверхностных дефектов контролируемых объектов, изготовленных из ферромагнитных материалов:
- патент США, US №5,389,876 «Гибкие вихретоковые массивы поверхностного измерения для обнаружения приповерхностных дефектов в электропроводящих деталях», опубликованный 14.02.1995.
В данном патенте, помимо конструкции и технологии изготовления многоэлементных вихретоковых преобразователей с применением технологии фотолитографии, описана структура катушек вихретоковых преобразователей. В данном патенте раскрыты варианты конструкции гибких матричных многоэлементных преобразователей, содержащие электрически соединенные катушку возбуждения и катушку измерения, которые могут быть намотаны в одном направлении, так и в противоположном направлении, а также могут быть расположены со смещением относительно друг друга.
В данном патенте раскрыта конструкция, в том числе, и дифференциальных вихретоковых преобразователей, изготовленных по интегральной технологии, в составе многоканального вихретокового преобразователя.
Дифференциальные вихретоковые преобразователи
малочувствительны к изменениям электромагнитных свойств материала, из которого изготовлен объект контроля, малочувствительны к изменению зазора между дифференциальным вихретоковым преобразователем и поверхностью объекта контроля, вызванного ее загрязнением, или неравномерностью толщины, нанесенного на нее покрытия, или грубостью или шероховатостью ее поверхности, в то же время они чувствительны к определению поверхностных дефектов типа трещина, что, в совокупности, позволяет успешно применять их при контроле объектов, изготовленных из ферромагнитной стали, объектов с грубой или шероховатой поверхностью, объектов с загрязненной поверхностью, например, таких объектов, как колесные пары вагонов.
Недостатком гибких дифференциальных многоэлементных матричных вихретоковых преобразователей, описанных в патенте США, US №5,389,876, является то, что, как и любые дифференциальные вихретоковые преобразователи, они чувствительны только к поверхностным дефектам типа трещина, ориентированным поперек базы вихретокового дифференциального преобразователя и практически нечувствительны к дефектам типа трещина, ориентированным вдоль базы вихретокового дифференциального преобразователя, что не позволяет обеспечить высокую вероятность обнаружения дефектов типа трещина любой ориентации, что негативно влияет на достоверность проводимого с помощью такого преобразователя неразрушающего контроля. Таким образом, в патенте США №5,389,876, на фиг. 4, поз. 25 изображены измерительные катушки, а на фиг. 4, поз. 21 изображена катушка возбуждения одноэлементного дифференциального вихретокового преобразователя, база которого ориентирована поперек направления сканирования. Такой дифференциальный вихретоковый преобразователь позволяет обнаруживать только продольные дефекты, ориентированные только параллельно направлению сканирования.
Из уровня техники известны автоматизированные установки контроля колесных пар вагонов, реализующие как вихретоковый, так и ультразвуковой методы контроля:
- патент РФ на полезную модель №113365 «Устройство для неразрушающего контроля колесных пар», выданный на имя ЗАО «Научно-промышленная группа «АЛТЕК», Санкт-Петербург, дата приоритета 21.09.2011;
- патент РФ на полезную модель №82857 «Система диагностики колесной пары на базе полной дефектоскопии с применением бесконтактных методов неразрушающего контроля», выданный на имя ОАО «Российские железные дороги», г Москва, дата приоритета 18.12.2008.
Автоматизированная установка, описанная в патенте РФ на полезную модель №82857 имеет два поста контроля, занимающие значительное пространство в цеху.
Обе автоматизированные установки (полезные модели RU №113365, RU №82857) обеспечивают проведение как ультразвукового, так и вихретокового контроля колес, но только ультразвукового контроля оси, что не исключает необходимость поста магнитопорошкового контроля оси.
Наличие в ограниченном пространстве вагоноремонтного предприятия дополнительного поста магнитопорошкового контроля является существенным недостатком пяти перечисленных выше автоматизированных установок неразрушающего контроля колесной пары (полезные модели RU №84565, RU №39954, RU №113365, RU №82857, изобретение RU №2289128).
Известен патент РФ на полезную модель №140286 «Аппаратно-программный комплекс неразрушающего контроля объектов», выданный на имя компании ООО «Научно-промышленная компания «Техновотум», г. Москва дата приоритета 30.08.2013.
Данная автоматизированная установка обеспечивает проведение как ультразвукового, так и вихретокового контроля колес, ультразвукового контроля оси, а также не исключена возможность проведения вихретокового контроля оси колесной пары, однако, из открытых источников в сети Интернет (https://www.votum.ru/production/industrialPlantsND/roboskop-vtm-5000---kp) известно, что проведение вихретокового контроля оси в действительности по этому патенту не было реализовано.
Кроме того, данная автоматизированная установка обладает существенным недостатком, заключающемся в том, что установка позволяет проводить контроль не более чем двух зон колесной пары одновременно за счет возможности использованияв один момент времени только одного или двух преобразователей, (например, вихретокового или ультразвукового). Это приводит к тому, что большое число операций контроля, можно проводить на установке только последовательно, в результате чего значительно увеличивается время контроля колесной пары и снижается ее производительность.
Кроме того, в данной автоматизированной установке отсутствует возможность неразрушающего контроля колесных пар с полыми осями.
Известен способ ультразвукового контроля оси, оснащенной полостями в виде глухих отверстий с обеих торцов колесной пары: Евразийская заявка на изобретение №201691783 «Ось колесных пар и соответствующий способ ультразвукового контроля» выданный на имя компании ЛУККИНИ PC С.П.А., Италия, дата публикации 30.12.2016.
Данный способ ультразвукового контроля позволяют повысить достоверность и производительность ультразвукового контроля оси, однако, как видно из его описания, имеются следующие недостатки: способ не предназначен для контроля полых осей, а предназначен для контроля сплошных осей, у которых есть специальное глухое отверстие в торце оси с обеих сторон; отсутствует вихретоковый контроль, который выявляет поверхностные дефекты (типа трещина) любой ориентации на поверхности оси. В данной установке не предусмотрена возможность контроля колес и тормозных дисков (при их наличии в колесной паре).
Из уровня техники известна установка для ручного неразрушающего ультразвукового контроля полых осей:
- патент РФ №2453837 «Способ и прибор для ручного неразрушающего контроля полых шкворней оси, обладающих профилями поперечного сечения с переменными внутренним и внешним радиусами», выданный на имя В э МФРАНС, Франция, дата приоритета 16.06.2008;
Из уровня техники известны комплексы автоматизированного контроля полых осей:
- патент РФ №2453836 «Способ и устройство автоматического неразрушающего контроля трубчатых колесных осей с профилями с переменными внутренним и наружным радиусами», выданный на имя В э МФРАНС, Франция, дата приоритета 16.06.2008;
- комплекс автоматизированного ультразвукового контроля полых осей колесных пар SHUTLE R (Свидетельство об утверждении типа средства измерений №43776, выданный Федеральным агентством по техническому регулированию РФ, 16.09.2011 г., фирме «Cegelec Anlagenund Automatisierungstechnik GmbH & CoKG» (Германия)), описание типа средства измерения (Приложение к свидетельству №43776 об утверждении типа средств измерения и методики поверки МП 07.86-2011).
Известна автоматизированная система контроля колесных пар AURA (Рокштро Б., Вальте Ф., Каппес В., AURA - система контроля колесных пар: обода, диска и сплошной/полой оси. В мире неразрушающего контроля, 2001 №3 (12), 59-62), в состав которой входят модуль контроля обода и дискаи модуля контроля сплошных осей. Данная система позволяет контролировать колесные пары на полых и сплошных осях, с колесами с различным профилем диска, с тормозными дисками и без тормозных дисков. Недостатком данной системы является отсутствие вихретокового контроля полой оси со стороны центрального отверстия, и отсутствие вихретокового контроля всей поверхности колесной пары, система имеет два поста контроля, занимающие значительное пространство в цеху.
Упомянутые выше установки используют для контроля полой оси только ультразвуковой метод контроля, позволяющий контролировать только внутренние дефекты полой оси и не используют вихретоковый метод контроля, который позволяет выявлять поверхностные дефекты (типа трещина), а также не позволяют проводить контроль колесных пар со сплошными осями.
Известна автоматизированная установка неразрушающего контроля колесных пар, обеспечивающая проведение ультразвукового и вихретокового контроля как колес, так и осей колесных пар, СНК КП-8 (Мищенко В.П., Свистун А.В. Установка автоматизированная для комплексного неразрушающего контроля колесных пар вагонов СНК КП-8. Опыт эксплуатации на предприятии ГП «Укрспецвагон». Журнал «Неразрушающий контроль» 2012; известна аналогичная установка автоматизированная для комплексного неразрушающего контроля СНК КП-8 (SNK КР-8), описание типа средства измерений- приложение к свидетельству об утверждении типа средства измерений №76374, информация в сети Интернет по адресу http://www.ndt.com.ua/brochures/mag2012Ru.pdf). выбранная за прототип как наиболее близкий из аналогов. Кроме того, на канале YouTube по адресу в сети Интернет https.://www.youtube.com/watch?v=a8FvlaAKVyA доступен просмотр видеоролика о работе автоматизированной установки комплексного неразрушающего контроля колесных пар.
Установка автоматизированная для комплексного неразрушающего контроля СНК КП-8 (SNK КР-8 - далее по тексту СНК КП-8, выбранная в качестве прототипа (далее по тексту установка - прототип СПК КП-8), реализована с использованием четырех последовательно расположенных друг за другом постов: пост загрузки колесной пары, двух постов контроля и пост выгрузки колесной пары. Установка построена по модульному принципу и включает механические и электронные модули.
В установке - прототипе СНК КП-8 на первом посту, посту загрузки колесной пары, расположено устройство определения состояния буксового узла (с кольцами, без колец) и измерения диаметра поверхности катания колеса с системой видеосчитывания номера колесной пары. После определения указанных параметров колесной пары устройство подачи колесной пары с поста загрузки перемещает колесную пару на второй пост, пост вихретокового контроля оси колесной пары. На втором посту происходит вихретоковый контроль оси колесной пары одноэлементными вихретоковыми преобразователями. Второй пост состоит из модуля вихретокового контроля средней части оси колесной пары, модуля вихретокового контроля шейки оси колесной пары, модуль вихретокового контроля внутренних колец подшипников буксового узла, модуля вращения, модуля перемещения колесной пары. В процессе проведения вихретокового контроля оси на втором посту, происходит вращения колесной пары вокруг своей оси с помощью модуля вращения колесной пары. После проведения вихретокового контроля оси колесной пары устройство подачи колесной пары, установленное на этом посту, перемещает колесную пару на третий пост, пост вихретокового и ультразвукового контроля колеса и ультразвукового контроля оси. На третьем посту происходит вихретоковый и ультразвуковой контроль колеса, а также ультразвуковой контроль оси. Этот пост контроля включает: модуль ультразвукового контроля колеса, модуль ультразвукового контроля оси, модуль вихретокового контроля обода колеса, модуль вихретокового контроля приободной зоны с внутренней стороны колеса, модуль ультразвукового, а точнее электромагнитоакустического контроля поверхности катания колеса, модуль разворота и вращения колесной пары. На третьем посту модуль вихретокового контроля производит контроль первого колеса колесной пары, модуль ультразвукового контроля производит контроль второго колеса и оси со второй стороны колесной пары, затем модуль разворота разворачивает колесную пару на 180 градусов, после чего модуль вихретокового контроля производит контроль второго колеса колесной пары, модуль ультразвукового контроля производит контроль первого колеса и оси спервой стороны колесной пары. После проведения вихретокового и ультразвукового контроля двух колес и ультразвукового контроля оси с обеих сторон колесной пары, устройство подачи колесной пары, установленное на этом посту, перемещает колесную пару на четвертый пост, пост выгрузки колесной пары. Пост выгрузки колесной пары является последним постом установки - прототипа СНК КП-8. На посту выгрузки колесная пара удаляется с позиции контроля. В зависимости от исполнения установки-прототипа СНК КП-8, распределение модулей между постами может различаться, а количество постов может быть больше.
Сигналы со всех вихретоковых и ультразвуковых преобразователей поступают в модули передачи информации. Модули передачи информации представляют собой многоканальные электронные устройства серии «ОКО» и выполняют передачу данных в реальном масштабе времени в модуль обработки и визуализации информации.
Модуль обработки и визуализации информации представляет собой компьютер с интерфейсом пользователя и специализированным программным обеспечением для проведения обработки данных, их визуализации, создания отчетности, ведения архивов контроля и управления работой всех модулей контроля и устройств автоматизированной установки.
Вся информация о проведении контроля колесной пары сохраняется в базе данных и доступна для дальнейшего анализа и визуализации. Оператор, используя программу просмотра результатов контроля, может систематизировать информацию о результатах контроля колесных пар по интересующим его фильтрам (по дате проведения контроля, заводу изготовителю оси, имени оператора и т.д.), а также сохранить протоколы контроля всех проконтролированных колесных пар с визуализацией обнаруженных дефектов колесной пары.
Автоматизированная установка неразрушающего контроля колесных пар - прототипа СНК КП-8 позволяет проводить контроль колесных пар, следующих типов: РУ1Ш-957-Г, РВ2Ш-957-Г, РУ1-957-Г и в следующей комплектации: с голыми шейками оси (Фиг. 2 г), с внутренними кольцами подшипников, напрессованными на шейках оси (Фиг. 2в). Автоматизированная установка прототипа СНК КП-8 не позволяет осуществлять неразрушающий контроль колесных пар с полыми осями и колесных пар с тормозными дисками.
С применением установки - прототипа СНК КП-8 возможно проводить вихретоковый контроль следующих зон колесной пары:
 ось:
ось:
 средняя часть,
средняя часть,
 открытые участки подступичных частей с внутренней стороны,
открытые участки подступичных частей с внутренней стороны,
 шейки оси (при голых шейках оси),
шейки оси (при голых шейках оси),
 предподступичные части с наружной стороны;
предподступичные части с наружной стороны;
 колесо:
колесо:
 боковая поверхность обода с внутренней стороны колеса,
боковая поверхность обода с внутренней стороны колеса,
 боковая поверхность обода с наружной стороны колеса,
боковая поверхность обода с наружной стороны колеса,
 боковая поверхность обода с наружной стороны колеса в зоне клеймения,
боковая поверхность обода с наружной стороны колеса в зоне клеймения,
 приободная зона диска с внутренней стороны для колес с плоскоконической формой диска,
приободная зона диска с внутренней стороны для колес с плоскоконической формой диска,
 переход от диска к ступице с наружной стороны для колес с плоскоконической формой диска,
переход от диска к ступице с наружной стороны для колес с плоскоконической формой диска,
 торцевая поверхность ступицы с внутренней стороны колеса,
торцевая поверхность ступицы с внутренней стороны колеса,
 торцевая поверхность ступицы с наружной стороны колеса (при снятых лабиринтных и внутренних кольцах подшипников),
торцевая поверхность ступицы с наружной стороны колеса (при снятых лабиринтных и внутренних кольцах подшипников),
 диск колеса с внутренней и наружной стороны (для колес с криволинейной формой диска),
диск колеса с внутренней и наружной стороны (для колес с криволинейной формой диска),
 гребень (после обточки колеса);
гребень (после обточки колеса);
 внутренние кольца подшипников, напрессованные на шейки оси: рабочая наружная цилиндрическая поверхность внутренних колец подшипника.
внутренние кольца подшипников, напрессованные на шейки оси: рабочая наружная цилиндрическая поверхность внутренних колец подшипника.
С применением установки - прототипа СНК КП-8 возможно проводить ультразвуковой контроль с применением следующих вариантов методов контроля следующих зон колесной пары (условные обозначения зон и вариантов методов контроля используются согласно отраслевых Правил ПРНКВ.2, опубликованных по адресу в сети Интернет http://www.ntcexpert.ru/documents/docs/PR_NK_V2.pdf):
ось с торца:
AR1.1 дальняя подступичная часть,
AR1.2 и AR1.4 шейка,
AR1.3 ближняя подступичная часть;
ось с цилиндрической части:
AR3.1 внешняя часть подступичной части,
AR3.1 внутренняя часть подступичной части;
ось с предподступичной части:
BR1 разгрузочная канавка и зона под внутренней кромкой кольца подшипника,
BR2 зона между кольцами подшипников,
BR3 зона под внешней ступицей колеса;
обод колеса:
DR3.3 гребень колеса,
DR2.1 основное сечение обода под уровнем поверхности катания,
DR2.2 основное сечение обода на расстоянии 30 мм от нижнего края обода,
DR3.1 внешняя боковая грань обода в зоне сопряжения с поверхностью катания, контроль с внутренней поверхности обода,
о DR4 поверхность катания обода.
На втором и третьем посту в установке - прототипе СНК КП-8 каждый модуль вихретокового контроля содержит сканеры, состоящие из вихретоковых преобразователей типа МДФ (одноэлементный мультидифференциальный вихретоковый преобразователь) и устройства позиционирования вихретоковых преобразователей относительно объекта контроля. Модуль вихретокового контроля также содержит устройства подвода вихретокового сканера.
Установка - прототип СНК КП-8 имеет ряд существенных недостатков. Первый недостаток установки - прототипа СНК КП-8: как было указано в источнике информации (Мищенко В.П., Свистун А.В. Установка автоматизированная для комплексного неразрушающего контроля колесных пар вагонов СНК КП-8. Опыт эксплуатации на предприятии ГП «Укрспецвагон». Журнал «Неразрушающий контроль» 2012), на обоих постах контроля колесной пары в установке - прототипе СНК КП-8 каждый модуль вихретокового контроля содержит сканеры, содержащие вихретоковые преобразователи типа МДФ, представляющие собой одноэлементные мультидифференциальные вихретоковые преобразователи. Известно (В.Н. Учанин. Вихретоковые мультидифференциальные преобразователи и их применение. Техническая диагностика и неразрушающий контроль, №3, 2006, с. 34-41, рис. 1; Uchanin V., Mook G., Stepinski Т. The investigation of deep penetrating high resolution EC probes for subsurface flaw detection and sizing, 8-th Europ. Conf. for NDT, Barcelona. 2002; www.ndt.net.Интернет журнал NDT net. - 2003, February, 8. №2), что изображенная на Фиг. 3 угловая диаграмма зависимости чувствительности мультидифференциальных вихретоковых преобразователей типа МДФ от угла между направлением распространения поверхностной несплошности (типа дефект) и направлением сканирования 30, имеет четырехлепестковую форму. Максимальная чувствительность к поверхностной несплошности (типа дефект) при их взаимной ориентации, соответствующей углам 0°, 90°, 180° и 270°.Как видно из диаграммы на Фиг. 3, полярность 31 сигнала 32 мультидифференциального вихретокового преобразователя типа МДФ, полученного от несплошностей (типа дефект), ориентированных относительно вихретокового преобразователя под углами 0° и 180°, противоположна полярности 33 сигналов 34, полученных от несплошностей (типа дефект), ориентированных относительно вихретокового преобразователя под утлом 90° и 270°. На Фиг. 3 также приведены изображения сигналов мультидифференциального вихретокового преобразователя типа МДФ положительной 33 и отрицательной 31 полярности на комплексной плоскости. При этом очевидно, что чувствительность к несплошностям (типа дефект), ориентированным относительно вихретокового преобразователя под углом 45°, 135°, 225° и 315° будет нулевой, а чувствительность к несплопшости (типа дефект), ориентированным относительно вихретокового преобразователя под близкими к этим значениям углами будет приближаться к нулевому значению и сигналы от этих несплошностей (типа дефект) могут не достигать порога срабатывания 35 в автоматическом пороговом устройстве установки - прототипа СНК КП-8, сигнализирующем о наличии дефекта в колесной паре. В отличии от ручного контроля с использованием МДФ преобразователя, в автоматизированной установке - прототипе СНК КП-8 нет возможности вращать вихретоковый преобразователь вокруг своей оси, чтобы найти то положение, где сигнал от дефекта будет максимальный и превысит установленный браковочный порог срабатыванияв автоматическом устройстве, сигнализирующем о наличии дефекта в колесной паре. Таким образом, жесткая фиксации вихретоковых преобразователей типа МДФ, в автоматизированной установке - прототипе СНК КП-8 для вихретокового контроля колесной пары, не позволяет обеспечить высокую вероятность обнаружения поверхностных несплошностей (типа дефект) колесной пары, ориентированных относительно вихретокового преобразователя под разными углами из-за того, что при ориентации поверхностной несплошности (типа дефект) относительно вихретокового преобразователя типа МДФ под углами 45°, 135°, 225° и 315°, вихретоковый преобразователь типа МДФ имеет нулевую чувствительность и поверхностные несплошности (типа дефект) на элементах колесной пары ориентированные под этими углами практически не могут быть обнаружены установкой - прототипом СНК КП-8. Таким образом, в прототипе СНК КП-8 вихретоковый преобразователь типа МДФ чувствует дефекты под углом как 0°, так и 90°, однако между 0 и 90°, при угле 45° есть зоны нечувствительности 36 мультидифференциального вихретокового преобразователя типа МДФ.
Второй недостаток установки - прототипа СНК КП-8: из уровня техники известно (РД ВНИИЖТ 27.05.01-2017) что несплошности (типа трещина) на поверхности катания колеса являются недопустимы дефектом, а с применением ультразвукового метода контроля в установке неразрушающего контроля колесных пар вагонов можно уверенно обнаружить трещины, ориентированные только поперек направления распространения акустической волны, излучаемой ультразвуковым преобразователем. При сравнении ультразвукового и вихретокового метода контроля, на примере контроля поверхности катания рельса, очевидно, что с применением вихретокового метода поверхностные дефекты (типа трещина) уверено обнаруживаются даже при их небольшой глубине, тогда как с применением ультразвукового метода уверено обнаруживаются поверхностные дефекты (типа) только больной глубины (Бели Я. Немеет И. Контактно-усталостные микротрещины головки рельса. Журнал «Путь и путевое хозяйство», №5, 2011 г.). При сравнении результатов контроля поверхности катания колеса колесной пары, проведенного вихретоковым и ультразвуковым методом контроля поверхности катания колеса оказывается, что, примерно, 70% трещин, выявленных вихретоковым методом контроля, не уверенно выявляются ультразвуковым методом.
В установке - прототипе СНК КП-8 для выявления трещин на поверхности катания обода используется только ультразвуковой метод контроля, и поэтому, как следствие, примерно, 70% недопустимых дефектов, ориентированных вдоль направления акустической волны, излучаемой акустическим преобразователем или имеющих глубину 1-2 мм, практически не обнаруживаются, что является существенным недостатком установки-прототипа СНК КП-8.
Из уровня техники известно, что присутствие несплошностей типа выщербин, ползунов и сколов на поверхности катания колеса во время его эксплуатации приводит к образованию и росту новых трещин, как в зоне перехода от диска к ступице, так и средней части диска.
В установке -прототипе СНК КП-8 не производится контроль средней части диска колес с плоскоконической формой диска с наружной и внутренней стороны, что означает невозможность обнаружения трещин в средней части диска, что является существенным недостатком прототипа.
Третий недостаток установки - прототипа СНК КП-8: известно, что установка-прототип СНК КП-8 не предназначена для ультразвукового и вихретокового контроля колесных пар с тормозными дисками и не осуществляет контроль колесных пар на полых осях.
Четвертый недостаток установки - прототипа СНК КП-8: вихретоковый контроль выполняется с применением мультидифференциальных вихретоковых преобразователей типа МДФ. Как известно специалисту в данной области техники, одноэлементные мультидифференциальные вихретоковые преобразователи типа МДФ имеют относительно большие габаритные размеры, что препятствует их объединению в компактные (с высокой степенью интеграции) многоэлементные сканирующие устройства, представляющее собой совокупность двух и более однотипных вихретоковых преобразователей, объединенных в одном корпусе. Это приводит к тому, что контроль всех открытых поверхностей колесной пары одновременно за один оборот вокруг своей оси колесной пары на установке автоматизированного неразрушающего контроля, имеющий только один пост контроля труднореализуем. Для проведения контроля колесной пары с применением мультидифференциальных вихретоковых преобразователей типа МДФ необходимо обеспечить несколько оборотов колесной пары вокруг своей оси с одновременной подачей вихретокового преобразователя вдоль зоны контроля, обеспечивающим траекторию сканирования контролируемого объекта по спирали или эвольвенте, а также проводить контроль различных зон колесной пары на разных последовательно установленных постах контроля. Этот недостаток приводит к снижению производительности установки из-за увеличения времени контроля одной колесной пары в установке на нескольких постах контроля последовательно.
Кроме того, из-за организации многопостового контроля площадь, занимаемая автоматизированной установкой неразрушающего контроля колесных пар в депо вагоноремонтного предприятия, также увеличивается.
Техническая задача заявляемого изобретения заключается в создании высокопроизводительного автоматизированного комплекса ультразвукового и вихретокового неразрушающего контроля колесных пар вагонов, позволяющего в рамках одного поста контроля с высокой вероятностью за два оборота вокруг своей оси колесной пары и один разворот колесной пары вокруг вертикальной оси на посту контроля одновременно обнаруживать поверхностные несплошности (типа дефект) любой ориентации всех открытых поверхностей колесной пары, элементы которой имеют как простой, так и сложный профиль контролируемой поверхности.
Кроме того, еще одной технической задачей заявляемого изобретения, является расширение функциональных возможностей автоматизированного комплекса за счет обеспечения возможности одновременного ультразвукового, вихретокового и оптического неразрушающего контроля колесных пар вагонов на полых осях с тормозными дисками и без них, а также контроль колесных пар с частично демонтированными буксовыми узлами с внутренними кольцами подшипников, напрессованными на шейки оси, а также с установленным буксовыми узлами с закрытыми крышками буксовых узлов и с установленными буксовыми узлами со снятыми крышками буксовых узлов.
Предложенное изобретение позволяет проводить вихретоковый контроль одновременно всех открытых поверхностей колесной пары, включая тормозные диски различной конструкции за счет использования многоэлементных интегральных вихретоковых преобразователей, выполненных с высокой степенью интеграции, в том числе, обеспечивающих контроль центра диска с различным профилем и поверхности катания колеса.
В заявляемом изобретении, высокая степень интеграции многоэлементного интегрального вихретокового преобразователя означает, что большое количество вихретоковых преобразователей (например, 32 штуки) размещены в компактном корпусе одного сканера, что позволяет разместить большое число сканеров на одной колесной паре так, чтобы они одновременно контролировали все открытые поверхности ее элементов и при этом они не мешают друг другу. В установке - прототипе СНК КП-8, при объединении нескольких одноэлементных вихретоковых преобразователей типа МДФ в один сканер, габаритные размеры сканера становятся значительными. Это приводит к тому, что теряется возможность проведения одновременного контроля всех открытых поверхностей элементов колесной пары в рамках одного поста. По этой причине в установке - прототипе СНК КП-8 вихретоковый контроль колесной пары проводится последовательно на двух постах, вихретоковый контроль зон, не являющихся обязательными в соответствии с нормативной документацией не проводится, а вихретоковый контроль некоторых зон, в частности всех элементов оси, переход от диска к ступице, приободной зоны с внутренней стороны колеса проводится за большое число оборотов при одновременной подаче вихретоковых преобразователей вдоль зоны контроля.
В заявляемом изобретении для контроля элементов колесной пары со сложным профилем (ось, внутренняя поверхность центрального отверстия полой оси, центр диска колеса с криволинейным профилем и т.д.) используются контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхностью, которая способна повторять сложный профиль контролируемой поверхности. Для контроля элементов колесной пары с простым профилем (поверхность катания колеса, гребень, тормозные диски и т.д.) используются бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью, которые могут не контактировать с контролируемой поверхностью.
Для достижения высокой производительности и обеспечения высокой вероятности обнаружения поверхностных несплошностей (типа дефект) различной ориентации многоэлементные интегральные вихретоковые преобразователи содержат пары идентичных дифференциальных вихретоковых преобразователей, установленных друг над другом в параллельных плоскостях и развернутых друг относительно друга ортогонально.
Для осуществления контроля колесных пар с полыми осями со стороны центрального отверстия в предложенном изобретении, установлен дополнительный модуль с ультразвуковыми преобразователями, многоэлементными интегральными вихретоковыми преобразователями и электронно-оптическими преобразователями (видеокамерами).
В результате применения изобретения повышается достоверность и производительность контроля колесных пар с различным профилем и составом ее элементов за счет применения многоэлементных интегральных вихретоковых преобразователей, обеспечивающие высокую вероятность обнаружения поверхностных дефектов любой ориентации, позволяющих провести вихретоковый контроль всех открытых поверхностей с произвольным профилем и позволяющих сократить общее время контроля за счет одновременного выполнения всех операций контроля всех элементов колесной пары, в том числе с полой осью и тормозными дисками. Снижается перебраковка (то есть признание годной колесной пары браком) за счет реализации в алгоритме обработки и анализа отраженного от несплошности (типа дефект) эхо-сигнала процедуры сравнения его образа (набора основных параметров) с образами эхо-сигналов от реальных дефектов, полученных ранее экспериментальным путем, которые хранятся в блоке архива сигналов реальных дефектов модуля управления. Компактность автоматизированного комплекса достигается за счет применения многоэлементных интегральных вихретоковых преобразователей с высокой степенью интеграции их исполнения и оригинальным исполнением конструкции комплекса. Помимо этого, отпадает необходимость организации в цеху поста магнитопорошкового контроля, что существенно сокращает общую площадь позиций неразрушающего контроля вагоноремонтного предприятия, обеспечивая возможность внедрения изобретения без существенных капиталовложений на реконструкцию помещений.
Доказательство возможности реализации заявляемого изобретения показано на примере функциональной схемы автоматизированного комплекса неразрушающего контроля колесных пар вагонов на полой оси с тормозными дисками, изображенного на фиг. 4а и на примере функциональной схемы заявляемого автоматизированного комплекса для контроля колесных пар на полой оси без тормозных дисков, изображенного на фиг. 4б.
Данные функциональные схемы комплекса содержат: 37 - модуль подъемно-поворотного устройства; 38 - модуль ультразвукового контроля оси (сплошной 1 или полой 24), цельнокатаного колеса 5 и тормозного диска (при наличии) 23, показанные на фиг. 1а, б; 39 - модуль вихретокового контроля открытых поверхностей цельнокатаного колеса 5, оси (сплошной 1 или полой 24) и тормозного диска (при наличии) 23; 40 - модуль ультразвукового, вихретокового и электронно-оптического контроля полой оси 24 через центральное отверстие 26 полой оси, показанные на Фиг. 16; 41 - модуль управления автоматизированным комплексом.
Модуль подъемно-поворотного устройства 37 осуществляет вращение и разворот колесной пары на 180 градусов для поочередного ультразвукового и вихретокового контроля ее элементов, а также сдержит измеритель углового положения колесной пары при ее вращении-энкодер 42.
Модуль ультразвукового контроля 38 содержит пять блоков ультразвуковых преобразователей 43, 44, 45, 46, 47 и осуществляет ультразвуковой контроль элементов колесной пары.
Первый блок ультразвуковых преобразователей 43 осуществляет контроль оси сплошной 1 полой 24 или (см. фиг. 1а и фиг. 1б) с ее торца 4, в том числе, производит контроль структуры металла (прозвучиваемость оси), ближней шейки оси 3 и ближней подступичной части оси 22, в том числе, при установленных буксовых узлах 27 со снятой крышкой 28 (см. фиг. 2а).
Второй блок ультразвуковых преобразователей 44 осуществляет контроль элементов, показанных на Фиг. 1а, Фиг. 1б, Фиг. 2а и Фиг. 2в оси полой 24 или сплошной 1 с внешней стороны колеса 5, в том числе предподступичной части оси 21 с напрессованными на нее внутренними кольцами подшипников 29 буксового узла 27 и подступичной части 22 оси (полой 24 или сплошной 1) под колесом 5, в том числе при установленных буксовых узлах 27.
Третий блок ультразвуковых преобразователей 45 осуществляет контроль элементов колесной пары, показанных на Фиг. 1а, Фиг. 1б, Фиг. 2а и Фиг. 2в оси полой 24 или сплошной 1 с внутренней стороны колеса 5, в том числе подступичной части оси 22 в случае, если внутренние кольца подшипников 29 буксового узла 27 напрессованы на шейке оси 3.
Четвертый блок ультразвуковых преобразователей 46 осуществляет контроль элементов колесной пары, показанных на Фиг 1а, основного сечения колеса 5, в том числе сечений обода 6, гребня 11 и поверхности катания колеса 12.
Пятый блок ультразвуковых преобразователей 47 осуществляет контроль элементов колесной пары, показанных на Фиг. 1а, Фиг. 1б, Фиг. 2а и Фиг. 2в тормозного диска 23 (при его наличии). Количество пятых блоков ультразвуковых преобразователей 47 равно количеству тормозных дисков 23, расположенных на одной стороне оси полой 24 или сплошной 1.
Модуль вихретокового контроля 39 содержит четыре блока многоэлементных интегральных вихретоковых преобразователей 48, 49, 50 и 51, которые осуществляют вихретоковый контроль всех открытых поверхностей элементов колесной пары.
Первый блок многоэлементных интегральных вихретоковых преобразователей 48 осуществляет контроль открытых поверхностей тормозного диска 23 (при его наличии). Количество первых блоков многоэлементных интегральных вихретоковых преобразователей 48 равно количеству тормозных дисков, расположенных на одной стороне оси (полой 24 или сплошной 1).
Второй блок многоэлементных интегральных вихретоковых преобразователей 49 осуществляет контроль открытых поверхностей колеса 5.
Третий блок многоэлементных интегральных вихретоковых преобразователей 50 осуществляет контроль открытой поверхности средней части оси (полой 24 или сплошной 1),
Четвертый блок многоэлементных интегральных вихретоковых преобразователей 51 осуществляет контроль следующих элементов колесной пары: открытой поверхности шейки оси 3, в том числе, предподступичной части оси 21 в случае контроля колесной пары с голыми шейками оси, а также открытые поверхности внутренних колец подшипников 29, напрессованных на шейки оси 3, в случае контроля колесной пары с частично демонтированными буксовыми узлами 27, с напрессованными внутренними кольцами подшипников 29.
Модуль ультразвукового, вихретокового и электронно-оптического контроля 40 полой оси 24 через центральное отверстие 26 полой оси 24 содержит блок ультразвуковых преобразователей 52, блок многоэлементных интегральных вихретоковых преобразователей 53 и блок оптического контроля, содержащий электронно-оптические преобразователи (видеокамеры) 54. Блоки 52, 53 и 54 могут располагаться в любом порядке. Модуль 40 может быть разделен на две части: первая часть содержит блок 52 и располагается со стороны модуля 38, а вторая часть содержит блоки 53 и 54 и располагается со стороны модуля 39. Блок 52 осуществляет ультразвуковой контроль тела стенок оси со стороны центрального отверстия. Блок 53 осуществляет вихретоковый контроль внутренней поверхности центрального отверстия оси. Блок 54 осуществляет оптический контроль поверхности внутреннего отверстия оси и позволяет оператору на мониторе блока интерфейса пользователя и визуализации 55 модуля управления 41 производить визуальное подтверждение обнаруженного дефекта (при необходимости).
Модуль управления автоматизированным комплексом 41 содержит блок интерфейса пользователя и визуализации 55, блок цифровой обработки сигналов 56, блок порогового контроля 57 и банк архива сигналов реальных дефектов 58. Электрические 59 и пневматические 60 линии связи соединяют все модули и блоки между собой. Блок управления пневматикой, блок управления электроприводами, расположенные в модуле 41 не показаны, так как не являются предметом изобретения по настоящей заявке и могут быть выполнены также, как они были выполнены в известных из уровня техники автоматизированных установках контроля колесных пар вагонов, например, «Устройство для неразрушающего контроля колесных пар», патент РФ на полезную модель №113365. Электропитание комплекса осуществляется от промышленной сети 220/380 В, пневмопитание комплекса осуществляется от цеховой магистрали сжатого воздуха, имеющейся в ремонтном депо.
В составе блока 50, используются контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхностью, Фиг. 5а, в составе блоков 48 и 51 используются бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью, Фиг. 5б, в составе блока 49, используются контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхностью, Фиг. 5а, и бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью, Фиг. 5б.
На Фиг. 5а изображен контактный многоэлементный интегральный вихретоковый преобразователь с эластичной поверхностью 61, содержащий 62 - эластичное основание, 63 - печатную плату многоэлементного интегрального вихретокового преобразователя, 64 - эластичный защитный элемент, 65 - упругие элементы, 66 - блок первичной обработки информации многоэлементного интегрального вихретокового преобразователя. На Фиг. 56 изображен бесконтактный многоэлементный интегральный вихретоковый преобразователь с жесткой поверхностью 67, содержащий. 68 - жесткое основание, 69 - жесткую защитную пластину, 70 - печатную плату многоэлементного интегрального вихретокового преобразователя, 66 - блок первичной обработки информации многоэлементного интегрального вихретокового преобразователя.
Устройство и принцип работы платы многоэлементного интегрального вихретокового преобразователя иллюстрирован на Фиг. 6а, б. Плата многоэлементного интегрального вихретокового преобразователя выполнена по многослойной интегральной технологии и состоит из подложки 72 и набора проводников (катушек) вихретоковых преобразователей. Набор проводников (катушек) вихретоковых преобразователей разделен на комплекты элементов многоэлементного интегрального вихретокового преобразователя 73, расположенные друг с другом в один ряд, перпендикулярно направлению сканирования 30. Количество комплектов 73 на одной подложке 72 может быть, например, от одного до восьми штук. В каждом комплекте 73 друг над другом расположен набор состоящий из четырех вихретоковых преобразователей в интегральном исполнении.
Первый дифференциальный вихретоковый преобразователь продольных дефектов 74, база которого ориентирована поперек направления сканирования, состоит из катушки возбуждения 83 и измерительных катушек 75 и предназначен для обнаружения продольных несплошностей (типа дефект) на участке объекта контроля. Второй дифференциальный вихретоковый преобразователь поперечных дефектов 76, база которого ориентирована вдоль направления сканирования, то есть развернут относительно первого дифференциального вихретокового преобразователя продольных дефектов 74 примерно ортогонально в параллельной плоскости, состоит из катушки возбуждения 83 и измерительных катушек 77 и предназначен для обнаружения поперечных несплошностей (типа дефект) на участке объекта контроля. Для перекрытия соседних участков с целью повышения достоверности контроля, в каждом элементе расположен третий дифференциальный вихретоковый преобразователь 78, состоящий из катушки возбуждения 79 и измерительных катушек 77, смещенных на половину ширины элемента, предназначенный для обнаружения продольных дефектов, между соседними участками с их частичным перекрытием. Смещение третьего дифференциального вихретокового преобразователя 78 на половину ширины участка обусловлено тем, что такое смещение перекрывает зону нечувствительности дифференциальных вихретоковых преобразователей продольных дефектов 74, расположенных на соседних участках подложки 72.
Четвертый абсолютный вихретоковый преобразователь 81, состоящий из катушки возбуждения 83 и измерительной катушки 82, малочувствителен к несплошностям (типа дефект) и предназначен для измерения зазора вставить позицию зазора между поверхностью объекта контроля и первым, вторым и третьим дифференциальным вихретоковыми преобразователями вставить позицию преобразователей.
Одна и та же катушка возбуждения 83 является катушкой возбуждения для вихретоковых преобразователей 74, 76 и 81, а изменение ее роли производится при последовательной коммутации, а также при коммутации остальных катушек многоканального интегрального вихретокового преобразователя, производящейся в блоке первичной обработки информации контактного или бесконтактного многоэлементного интегрального вихретокового преобразователя 66. В соответствии с циклограммой работы блока первичной обработки информации контактного или бесконтактного многоэлементного интегрального вихретокового преобразователя 66 первым шагом, с целью обнаружения продольных дефектов на участке контроля, к блоку 66 подключаются катушки 77 и 83, вторым шагом, с целью обнаружения поперечных дефектов на участке контроля, к блоку 66 подключаются катушки 74 и 83, третьим шагом, с целью обнаружения продольных дефектов между соседними участками контроля, к блоку 66 подключаются катушки 79 и 80, четвертым шагом, с целью измерения расстояния между зонами элементов многоэлементного интегрального вихретокового преобразователя 73 и поверхностью объекта контроля на участке контроля, к блоку 66 подключаются катушки 82 и 83, после чего циклограмма повторяется.
На Фиг. 66 приведен пример одного из возможного варианта послойного расположения вихретоковых преобразователей в одном элементе заявляемого многоэлементного интегрального вихретокового преобразователя (снизу вверх): измерительные катушки дифференциального вихретокового преобразователя поперечных дефектов 77, измерительные катушки дифференциального вихретокового преобразователя продольных дефектов 75, катушка возбуждения вихретоковых преобразователей в зоне контроля 83, измерительная катушка абсолютного вихретокового преобразователя для измерения зазора 82, измерительные катушки дифференциального вихретокового преобразователя продольных дефектов смещенного относительно зоны контроля 80, катушка возбуждения вихретокового преобразователя смещенного относительно зоны контроля 79. Однако, заявленный технический результат, связанный с возможностью определения поверхностных дефектов любой ориентации, может достигаться и при любой другой последовательности расположения слоев вихретоковых преобразователей в элементе многоэлементного интегрального вихретокового преобразователя. Поскольку дифференциальные вихретоковые преобразователи изготовлены по интегральной технологии, они очень тонкие и, как было сказано выше, могут все четыре преобразователя компактно размещены друг над другом в одной зоне 73. Полученные в процессе контроля сигналы от абсолютного и дифференциальных вихретоковых преобразователей, расположенных в каждой зоне, поступают в блок первичной обработки информации многоэлементного интегрального вихретокового преобразователя 66.
На Фиг. 7 представлена диаграмма зависимости чувствительности дифференциальных вихретоковых преобразователей одного элемента многоэлементного интегрального вихретокового преобразователя, от угла между направлением распространения несплопшости (типа дефект) и направлением сканирования. Диаграмма первого дифференциального вихретокового преобразователя продольных дефектов 84 имеет форму похожую на цифру 8 и обеспечивает обнаружение несплошностей (типа дефект) ориентированных относительно направления сканирования 30 под углами от 300 до 60° и от 120 до 240°. Диаграмма второго дифференциального вихретокового преобразователя поперечных дефектов 85 имеет форму похожую на цифру 8 и обеспечивает обнаружение несплошностей (типа дефект) ориентированных относительно направления сканирования 30 под углами от 30 до 150° и от 210 до 330°. В блоке первичной обработки информации 66 производится совместная первичная обработка сигналов всех дифференциальных вихретоковых преобразователей. Как видно из Фиг. 7, зоны чувствительности первого дифференциального вихретокового преобразователя для обнаружения продольных дефектов 86 и зоны чувствительности второго дифференциального вихретокового преобразователя для обнаружения поперечных дефектов 87 пересекаются, что гарантирует отсутствие зон нечувствительности на угловой диаграмме чувствительности дифференциальных вихретоковых преобразователей 84 и 85 при условии совместной обработки их сигналов. Таким образом, описанная пара дифференциальных вихретоковых преобразователей чувствительна к дефектам, ориентированным под любым углом, т.е зоны нечувствительности отсутствуют.
Как было показано ранее на Фиг. 3, в прототипе, в отличии от предлагаемого решения, есть зоны нечувствительности 36 вихретокового преобразователя типа МДФ и поверхностные несплошности (типа дефект) на элементах колесной пары ориентированные под этими углами практически не могут быть обнаружены установкой - прототипом, то есть с помощью установки-прототипа невозможно определить дефекты колесной пары произвольной ориентации, что значительно снижает достоверность неразрушающего контроля.
Известно, что чувствительность дифференциальных вихретоковых преобразователей зависит от зазора между дифференциальным вихретоковым преобразователем и объектом контроля. При сканировании поверхности колесной пары, имеющей загрязнения или потеки краски, изменяющие зазор между многоканальным интегральным вихретоковым преобразователем и объектом контроля, чувствительность первого, второго и третьего дифференциальных вихретоковых преобразователи корректируется, основываясь на сигнале четвертого абсолютного вихретокового преобразователя 81 для измерения зазора 79, что обеспечивает высокую вероятность обнаружения дефектов любой ориентации в реальных условиях эксплуатации даже при контроле колесных пар, имеющих загрязнения и подтеки краски.
Пример конструкции, реализующей предлагаемое изобретения для контроля колесных пар с тормозными дисками, поясняется на структурной схеме, приведенной на фиг. 8а, пример конструкции, реализующей предлагаемое изобретение для контроля колесных пар без тормозных дисков, поясняется на структурной схеме, приведенной на фиг. 8б.
Для проведения контроля колесная пара закатывается по подводящим технологическим путям на ролики модуля подъемно-поворотного устройства 37. Напротив друг друга установлены две несущие конструкции, которые могут быть выполнены в виде первой стойки 88 с модулем ультразвукового контроля оси, колеса и тормозного диска (при наличии) 38 и второй стойки 89 с модулем вихретокового контроля всех открытых поверхностей колеса, оси и тормозного диска (при наличии) 39 и модулем ультразвукового, вихретокового и оптического контроля полой оси со стороны центрального отверстия 40. В модуле 38, установленном на первой стойке 88, размещены блоки ультразвуковых преобразователей 43, 44, 45, 46, 47 (при наличии тормозного диска).В модуле 39, установленном на второй стойке 89, установлены блоки многоэлементных интегральных вихретоковых преобразователей 48 (при наличие тормозного диска), 49. 50, 51, а в модуле 40 установлен блок ультразвуковых преобразователей 52, блок многоэлементных интегральных вихретоковых преобразователей 53 и блок оптического контроля полой оси 54.
Работа устройства, реализующего предлагаемое изобретение для контроля колесных пар с тормозными дисками, поясняется на структурной схеме, приведенной на фиг. 8а, работа устройства, реализующего предлагаемое изобретение для контроля колесных пар без тормозных дисков, поясняется на структурной схеме, приведенной на Фиг. 8б. Контроль можно проводить двумя способами. При первом способе одновременно, по мере вращения колесной пары вокруг своей оси контролируется первое колесо, первая часть оси и первый тормозной диск (при его наличии) блоками ультразвуковых преобразователей 43, 44, 45, 46, 47 модуля 38, второе колесо, вторая часть оси и второй тормозной диск (при его наличии) блоками многоэлементных интегральных вихретоковых преобразователей 48, 49, 50, 51 модуля 39, первая часть оси со стороны центрального отверстия блоком ультразвуковых преобразователей 52, блоком многоэлементных интегральных вихретоковых преобразователей 53 и блоком оптического контроля 54 модуля 40, после окончания контроля вышеперечисленных элементов колесной пары модуль 37 производит разворот колесной пары на 180 градусов, после чего одновременно начинают контролироваться второе колесо, вторая часть оси и второй тормозной диск (при его наличии) блоками ультразвуковых преобразователей 43, 44, 45, 46, 47 модуля 38 и первое колесо, первая часть оси, и первый тормозной диск (при его наличии) блоками многоэлементных интегральных вихретоковых преобразователей 48, 49, 50, 51 модуля 39 и вторая часть оси со стороны центрального отверстия блоком ультразвуковых преобразователей 52, блоком многоэлементных интегральных вихретоковых преобразователей 53 и блоком оптического контроля 54 модуля 40; при втором способе контроль всех перечисленных элементов колесной пары осуществляется не одновременно, а последовательно. Таким образом, каждое колесо, ось, тормозные диски (при наличии), контролируются блоками ультразвуковых преобразователей и блоками многоэлементных интегральных вихретоковых преобразователей, а полая ось (при ее наличии) с внутренней стороны центрального отверстия контролируется блоком многоэлементных интегральных вихретоковых преобразователей, блоком ультразвуковых преобразователей и блоком оптического контроля.
Работа модуля 38 иллюстрирована на Фиг. 8а и Фиг. 8б. При контроле колеса, части оси и тормозного диска (при наличии) блоками ультразвуковых преобразователей 43, 44, 45, 47 и 47, модуль 38 опускается до уровня, при котором ультразвуковые преобразователи могут контактировать с контролируемыми элементами колесной пары, подводятся исполнительными механизмами к колесной паре те ультразвуковые преобразователи, которые в исходном положении (до начала контроля) были отведены. После этого проводится ультразвуковой контроль всего контролируемого объема оси, колеса и тормозного диска (при наличии) с помощью ультразвуковых преобразователей, посылающих акустические колебания под определенными углами. Эти же ультразвуковые преобразователи осуществляют прием отраженных от несплошностей (типа дефект) металла эхо-сигналов, по параметрам которых определяется качество контролируемых элементов колесной пары. Углы и секторы прозвучивания каждого участка элемента колесной пары определяются отраслевой нормативной документацией. Допускается в качестве ультразвуковых преобразователей использовать, например, совмещенные пьезоэлектрические преобразователи, раздельно-совмещенные пьезоэлектрические преобразователи, преобразователи с фазированной антенной решеткой, преобразователи TOFT, электромагнитоакустические преобразователи при условии сохранения заданных отраслевой нормативной документацией секторов контроля (прозвучивания) элементов колесной пары. В случае проведения контроля колесной пары с установленным буксовыми узлами 27 с закрытой крышкой 28, ультразвуковой контроль оси с торцевой поверхности с использованием блока 43 не проводится, ультразвуковой контроль оси проводится только со стороны предподступичной части с применением блока 44.
Работа модуля 39 иллюстрирована на Фиг. 8а, Фиг. 8б и Фиг. 9. При контроле колеса, части оси и тормозного диска (при наличии) блоками многоэлементных интегральных вихретоковых преобразователей 48, 49, 50 и 51, модуль 39, опускается до уровня, при котором многоэлементные интегральные вихретоковые преобразователи могут контактировать с контролируемыми элементами колесной пары. Для чего механизм 90 перемещения модуля 39 в рассматриваемом примере реализации изобретения выполнен в виде трех направляющих балок 91, 92 и 93, на которых установлены каретки 94, 95 и 96, причем балка 92 закреплена на каретке 94, перемещающейся по балке 91, а балка 93 закреплена на каретке 95, перемещающейся по балке 92. Модуль 39 закреплен на каретке 96, перемещающаяся по балке 93. Каретки приводятся в движение электроприводами 97, 98 и 99. При движении модуля 39 вниз, перемещается каретка 94. При перемещении в первом горизонтальном направлении добавляется движение каретки 95, т.е. обеспечивается двух координатное перемещение, а при движении каретки 96 происходит перемещение модуля 39 во втором горизонтальном направлении, то есть обеспечивается трехкоординатное перемещение. Возможность перемещения в первом горизонтальной направлении обеспечивает возможность контроля колес и тормозных дисков (при наличии) разной толщины, а перемещение во втором горизонтальной направлении обеспечивает возможность контроля колес и тормозных дисков (при наличии), при наличии допустимых смещений при посадке на ось. Смещение цельнокатаного колеса 5 при посадке на ось (сплошная ось 1 или полая ось 24) определяется лазерным датчиком 100. При движении каретки 95 происходит затенение лазерного датчика 100 цельнокатаным колесом 5. Положение электропривода 98 в момент затенения лазерного датчика 100 цельнокатаным колесом 5 соответствует смещению цельнокатаного колеса 5 при посадке на ось (сплошную ось 1 или полую ось 24).
Работа модуля 40 иллюстрирована на Фиг. 8а, Фиг. 8б, Фиг. 10а и Фиг. 10б. При контроле полой оси со стороны центрального отверстия ультразвуковыми преобразователями 52, многоэлементными интегральными вихретоковыми преобразователями 53 и электронно-оптическими преобразователями (видеокамерами) 54, модуль 40 выдвигает внутрь центрального отверстия телескопический держатель с закрепленными на нем преобразователями. Например, ультразвуковые преобразователи 52 контролируют тело стенки полой оси, многоэлементные интегральные вихретоковые преобразователи 53 контролируют всю внутреннюю поверхность центрального отверстия, а электронно-оптические преобразователи (видеокамеры) 54 обеспечивают панорамный обзор центрального отверстия полой оси и детальный обзор узкого участка внутренней поверхности центрального отверстия полой оси. Механизм подвода может быть выполнены в виде электропривода 101, выдвигающего внутрь центрального отверстия полой оси телескопический держатель 102 с закрепленными на нем преобразователями и видеокамерами из исходного положения, Фиг. 10а и в рабочее положение, Фиг. 10б. Допускается в качестве ультразвуковых преобразователей использовать, например, совмещенные пьезоэлектрические преобразователи, раздельно-совмещенные пьезоэлектрические преобразователи, преобразователи с фазированной антенной решеткой при условии сохранения заданных отраслевой нормативной документацией секторов прозвучивания элементов колесной пары. Допускается в качестве многоэлементных интегральных вихретоковых преобразователей применять контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхностью и бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью.
На Фиг. 11 приведен пример установки бесконтактных многоэлементных интегральных вихретоковых преобразователей с жесткой поверхностью 67 на шейку 3 и предподступичную часть 21 сплошной оси 1.
На Фиг. 12а приведен пример установки бесконтактных многоэлементных интегральных вихретоковых преобразователей с жесткой поверхностью 67 на тормозной диск 23 и цельнокатаное колесо 5 с плоскоконическим диском 7 с внутренней стороны колеса 5. В случае контроля колеса с криволинейным диском бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью не подводятся к средней части диска, а вместо них подводятся контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхности
На Фиг. 12б приведен пример установки бесконтактных многоэлементных интегральных вихретоковых преобразователей с жесткой поверхностью 67 на тормозной диск 23 и цельнокатаное колесо 5 с плоскоконическим диском 7 с наружной стороны колеса 5. В случае контроля колеса с криволинейным диском бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью не подводятся к средней части диска, а вместо них подводятся контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхности.
На Фиг. 13а - пример установки контактных многоэлементных интегральных вихретоковых преобразователей с эластичной поверхностью 61 на среднюю часть оси 2 и бесконтактных многоэлементных интегральных вихретоковых преобразователей с жесткой поверхностью на шейку 29 и на предподступичную часть 9 сплошной оси 1 и на все доступные элементы цельнокатаного колеса с плоскоконическим диском 67 с внутренней его стороны.
На Фиг. 13б - пример установки контактных многоэлементных интегральных вихретоковых преобразователей с эластичной поверхностью 61 на среднюю часть оси 2 и бесконтактных многоэлементных интегральных вихретоковых преобразователей с жесткой поверхностью на шейку 29 и на предподступичную часть 9 сплошной оси 1 и на все доступные элементы цельнокатаного колеса с плоскоконическим диском 67 с наружной его стороны.
Работа модуль управления автоматизированным комплексом 41 иллюстрирована на Фиг. 8а, Фиг. 8б. Модуль 41 выполняет функции визуализации информации с интерфейсом пользователя и со специализированным программным обеспечением для проведения обработки данных, создания отчетности, ведения архивов контроля и управления работой всех модулей контроля автоматизированного комплекса. Модуль 41 содержит блок цифровой обработки сигналов 57, блок порогового контроля 56, банк архива сигналов от реальных дефектов 58 и блок визуализации и интерфейса пользователя 55. Модуль управления может быть построен на базе персонального компьютера или вычислительной станции, дополненной специализированными блоками и специализированным программным обеспечением.
Процесс управления всеми модулями автоматизированного комплекса осуществляется по заданному алгоритму через электрические 59 и пневматические 60 линии связи. В отличии от существующих алгоритмов, при обработке данных полученных от преобразователей используется самообучающийся алгоритм анализа и выделения на фоне помех сигнала, отраженного от несплошности (типа дефект) металла контролируемой колесной пары. При этом сигналы от каждого преобразователя и датчика угла положения колесной пары (энкодера) 42 поступают по электрической линии связи 59 на вход блока цифровой обработки сигналов 56, в котором каждому сигналу преобразователя присваивается соответствующее значение энкодера. Далее сигналы поступают на полосовой фильтр, который пропускает эхо-сигналы в заданной полосе частот в которой с вероятностью близкой к 1 могут находятся отраженные сигналы от несплошности (типа дефект). Затем сигналы, отраженные от несплошности, прошедшие через полосовой фильтр, поступают в блок порогового контроля 57, которой исключает из дальнейшего рассмотрения эхо-сигналы от несплошности, амплитуды которых ниже браковочного уровня (уровня при превышении которого принимается решение об возможности отнесения выявленной несплошности к классу «дефект»). Далее, сигналы от несплошности (типа дефект), превысившие браковочный уровень, сравниваются с сигналами из банка архива сигналов реальных дефектов 58, который содержит образы (набор определенных параметров) сигналов от реальных дефектов, полученных экспериментально ранее в результате ультразвукового и вихретокового контроля элементов колесных пар. При совпадении полученного сигнала от несплошности и одного из сигналов от реального дефекта из банка архива сигналов реальных дефектов 58, запускается повторный контроль, колесной пары. При этом полученные повторно сигналы от несплошности с каждого преобразователя накладываются друг на друга, чтобы исключить случайные сигналы. Тем самым реализуется фильтрация методом накопления данных не менее, чем при трехкратном их подтверждении. После чего обнаруженная несплошность относится к классу «дефект». В случае, если амплитуда сигнала существенно превышает браковочный уровень, а его образ не найден среди образов эхо-сигналов реальных дефектов из банка архивных данных 58, производится дополнительное вращение колесной пары с целью повышения вероятности обнаружения несплошности (типа дефект) и при положительным результате образ данного сигнала от несплошности автоматически заносится в банк архива сигналов реальных дефектов. Описанный самообучающийся алгоритм обнаружения дефектов существенно снижает повышает вероятность обнаружения несплошности типа недопустимый дефект и снижает перебраковку (то есть признание годной колесной пары браком), которая являющуюся одним из основных эксплуатационных показателей работы автоматизированных устройств неразрушающего контроля. В результате работы блока порогового контроля 57, оператору на блок визуализации и интерфейса пользователя 55 выводятся результаты контроля, например, выводится изображение контролируемой колесной пары с отмеченными на ней координатами обнаруженных дефектов, при этом сообщается какой дефект обнаружен каким преобразователем. Для каждого вида контроля (ультразвукового или вихретокового) выводится и своя таблица с признаками дефектов, эти таблицы заполняются на основании подтверждения, полученного в результате работы блока порогового контроля 57 и банка архива сигналов реальных дефектов 58. Для каждого отдельного признака дефекта каждого вида контроля оператор может провести подтверждающий контроль, подвернуть колесную пару с данным признаком в удобную для него зону, ознакомиться с местоположением конкретного дефекта, которое показано на изображении колесной пары а протоколе контроля.. Все протоколы контроля заносится в накопитель блока визуализации и интерфейса пользователя 55 для долговременного хранения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручной сканер для неразрушающего контроля поверхности катания и прилегающих к ней зон колес рельсового транспорта | 2020 |
|
RU2742368C1 |
| УСТРОЙСТВО ВИХРЕТОКОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ЭЛЕМЕНТОВ КОЛЕСНЫХ ПАР РЕЛЬСОВОГО ТРАНСПОРТА | 2022 |
|
RU2788320C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КОЛЕСНЫХ ПАР ВАГОНОВ | 2008 |
|
RU2380698C1 |
| СИСТЕМА КОМПЛЕКСНОГО ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ПОЕЗДОВ | 2010 |
|
RU2428341C1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ ДЕФЕКТОСКОПИИ КОЛЕСНЫХ ПАР ВАГОНОВ | 2005 |
|
RU2289128C1 |
| ПОСТ КОМПЛЕКСНОГО КОНТРОЛЯ ДЕФЕКТОВ БУКСОВЫХ УЗЛОВ И КОЛЕС ДВИЖУЩИХСЯ ВАГОНОВ | 2014 |
|
RU2578005C1 |
| Система для оценки технического состояния железнодорожного подвижного состава | 2024 |
|
RU2821813C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| АВТОМАТИЗИРОВАННАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕМЕНТОВ ПОДВЕСКИ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2578620C1 |
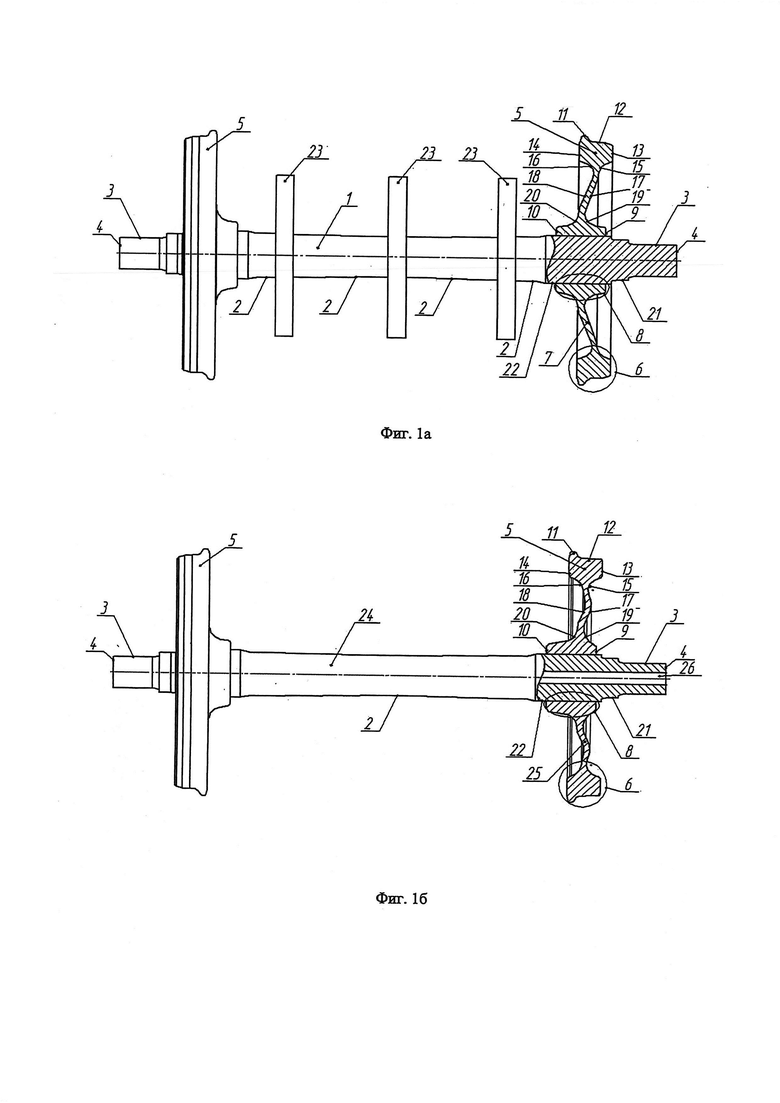

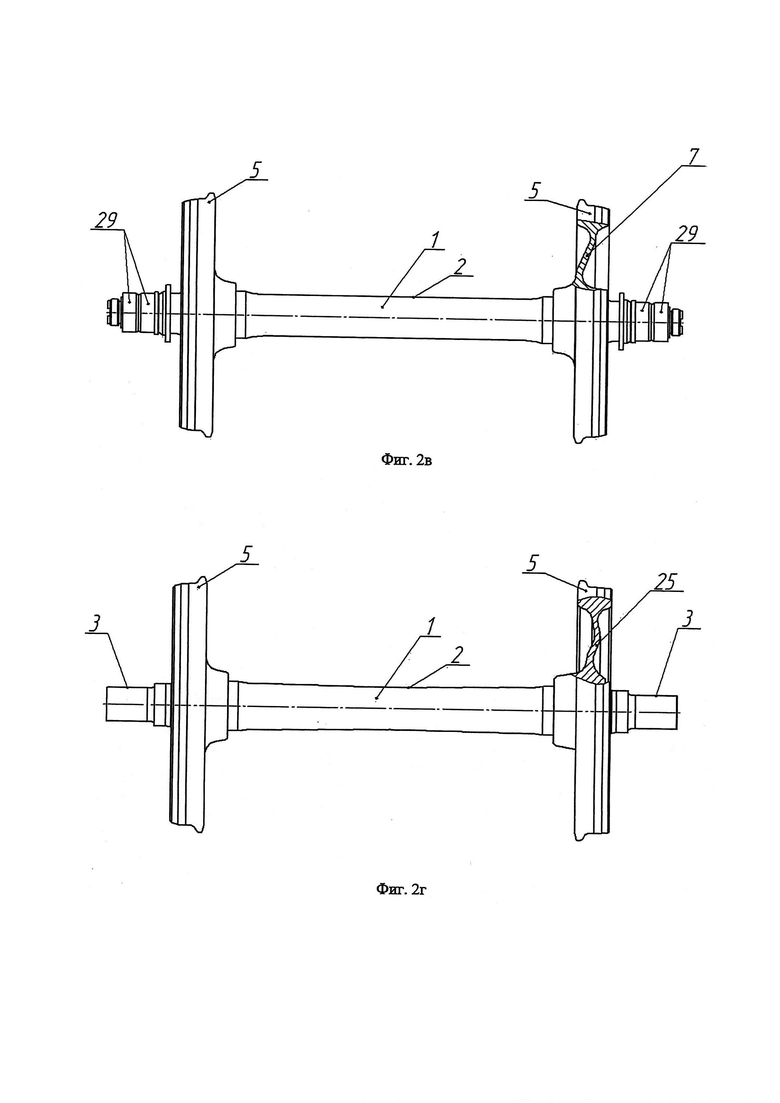
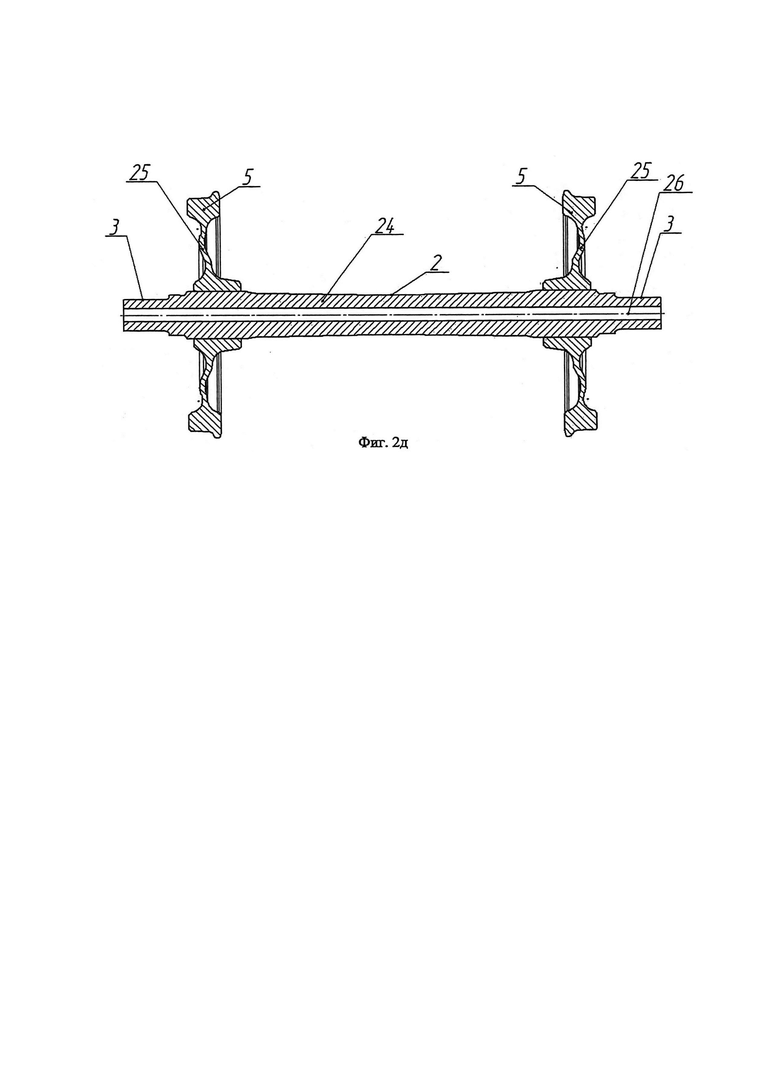
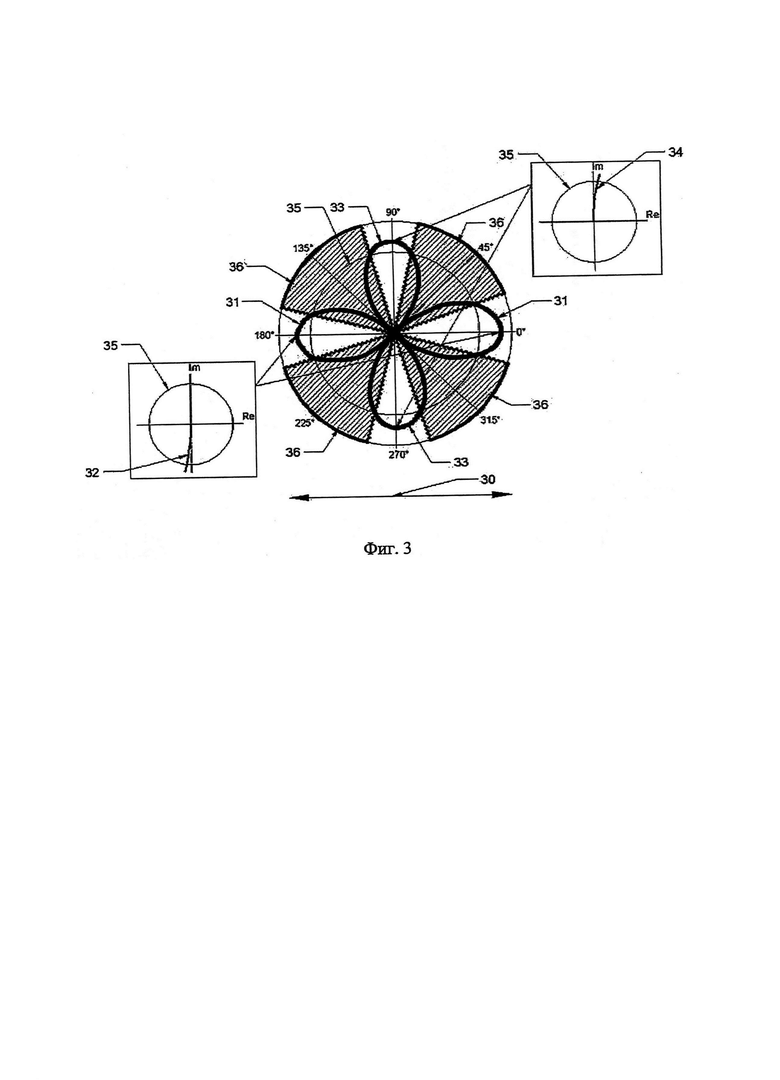
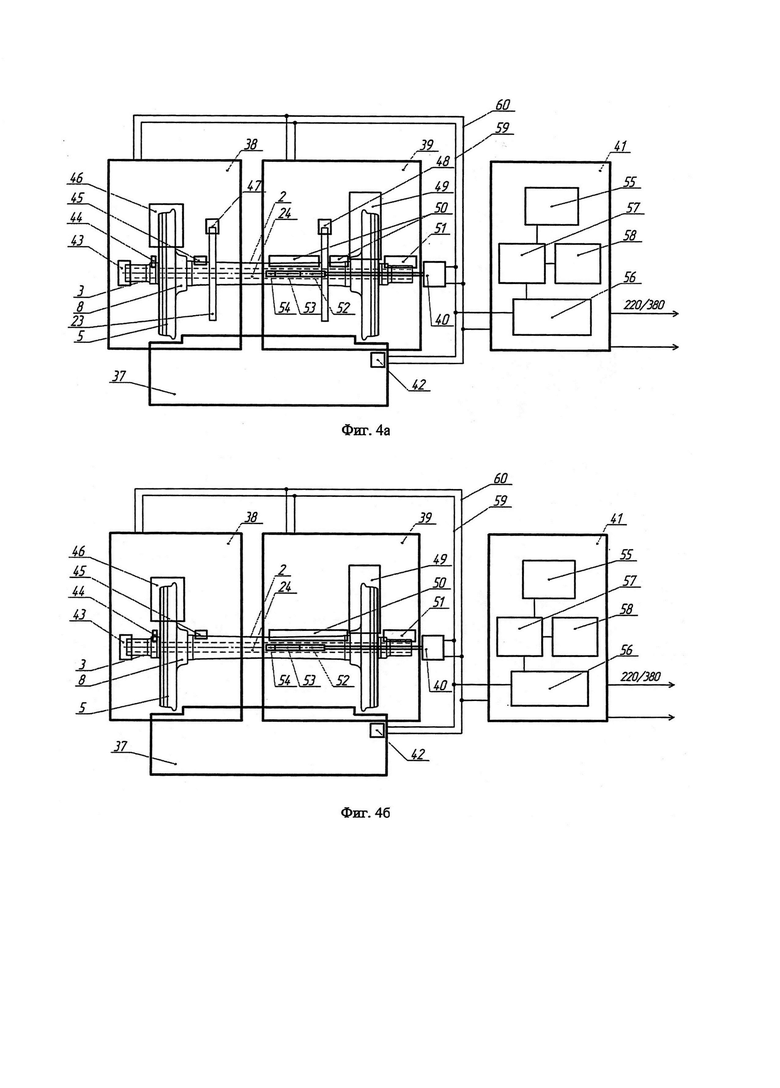
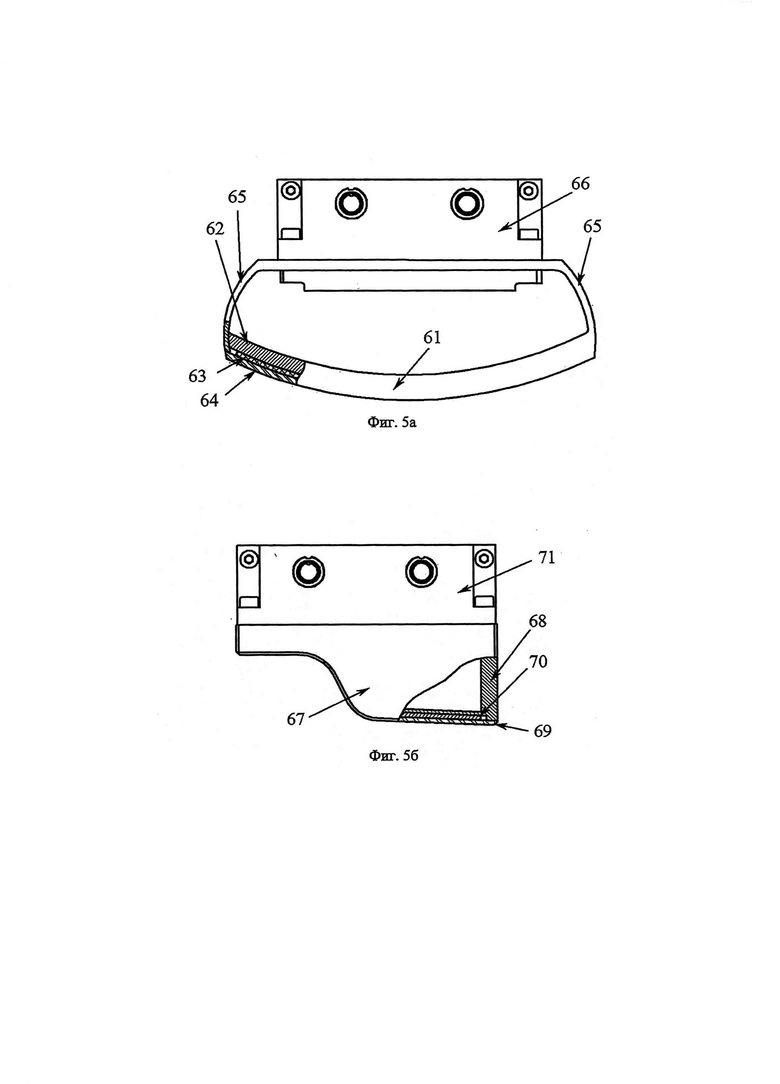
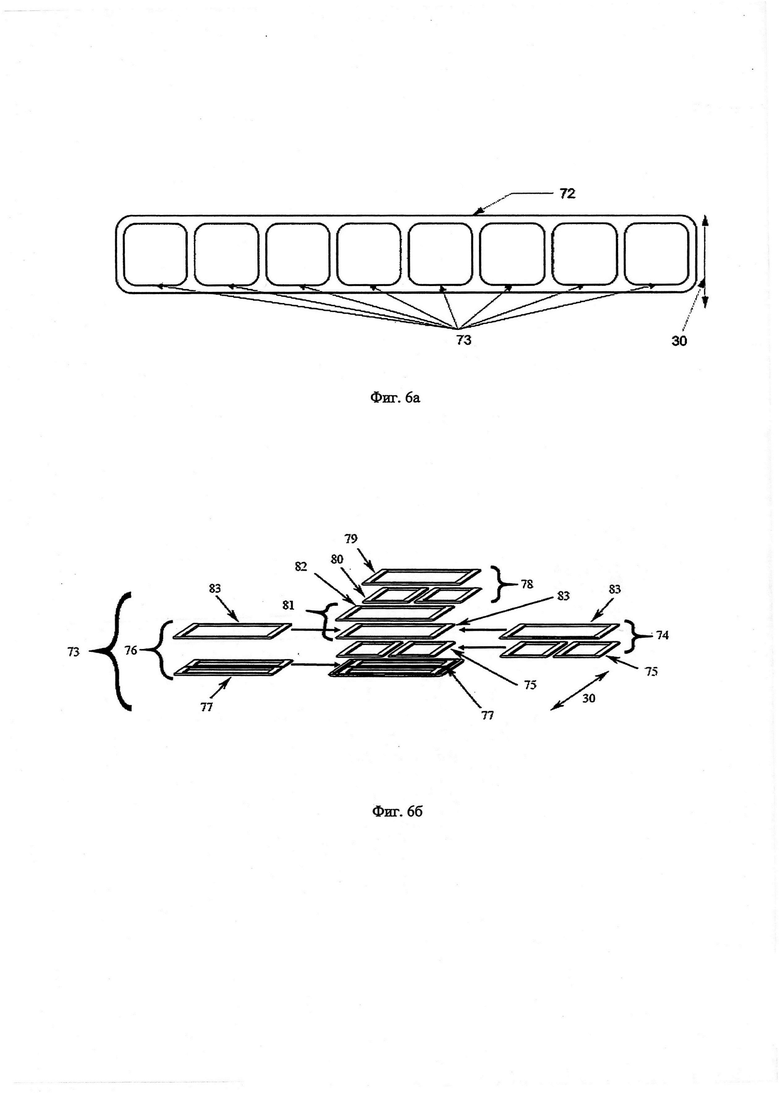
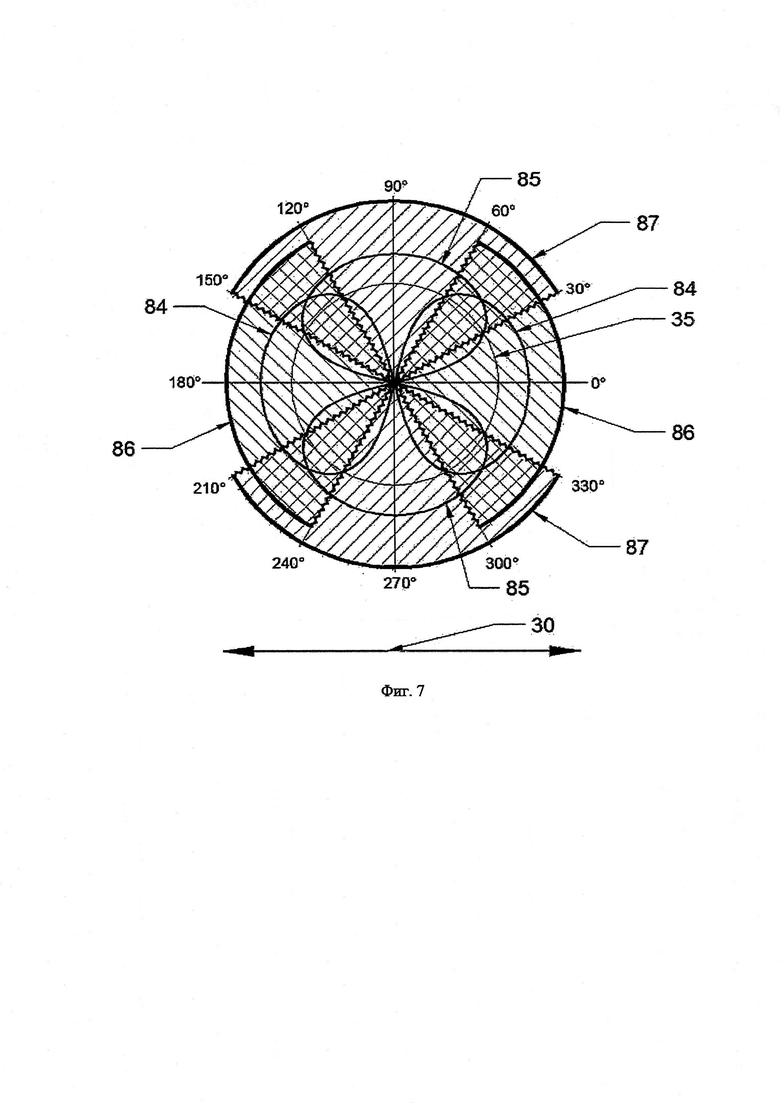
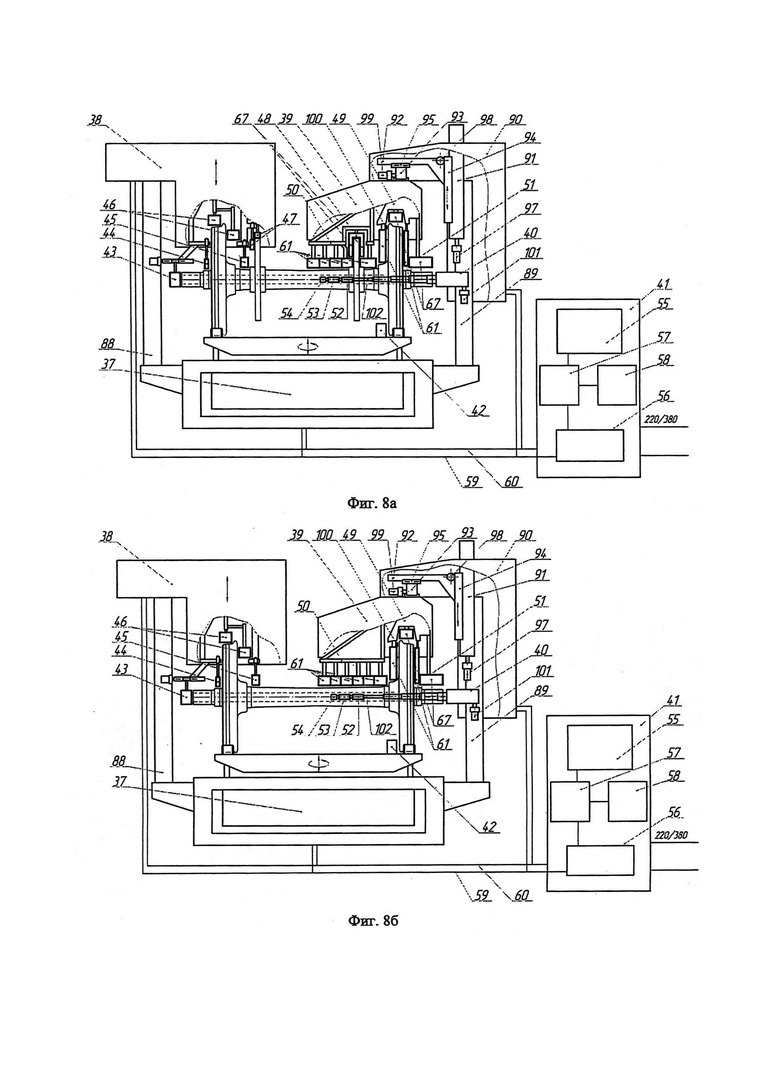
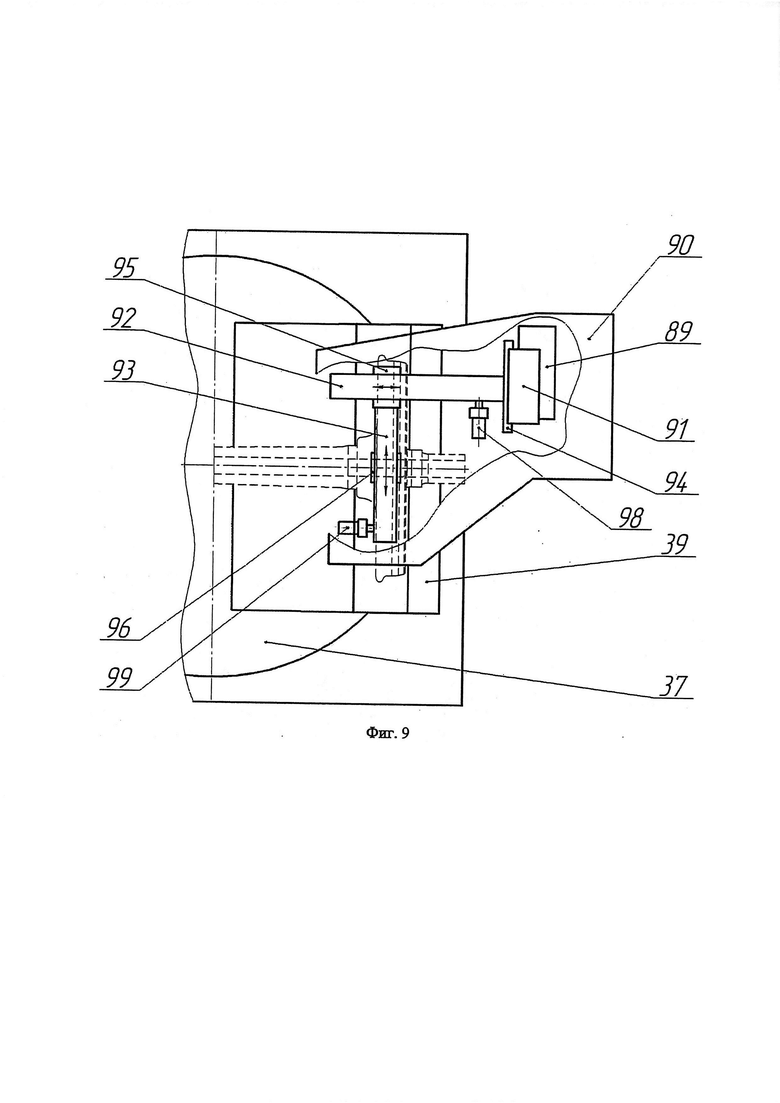
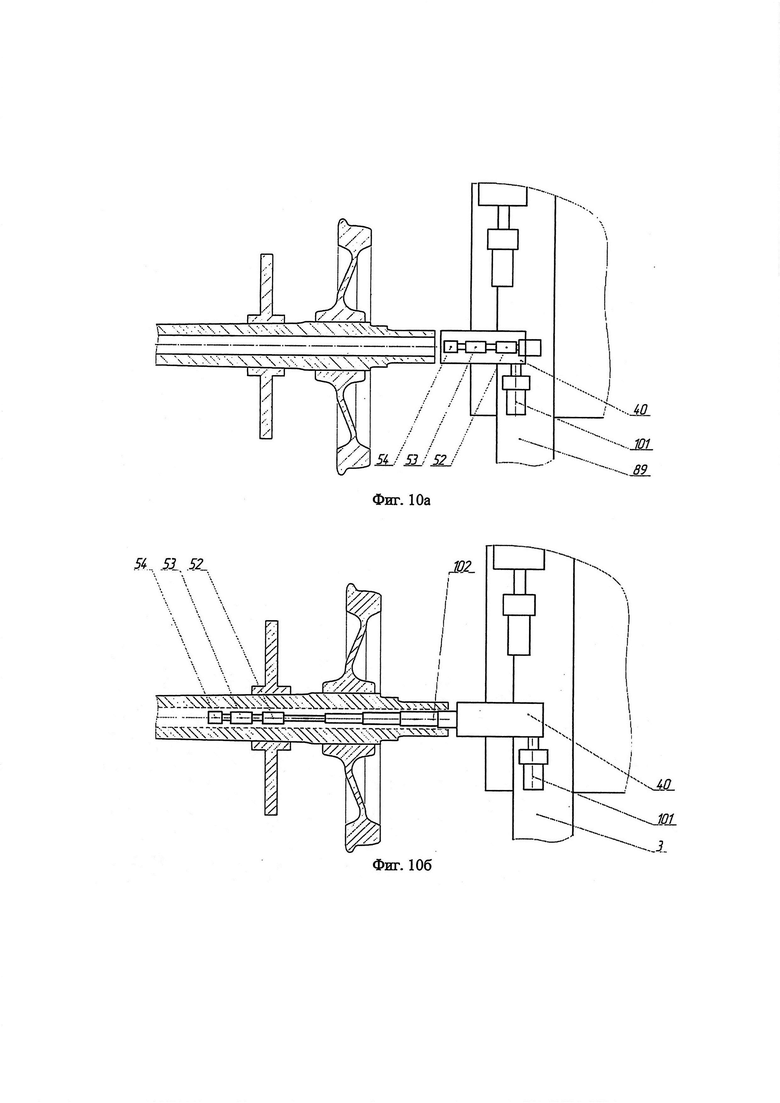
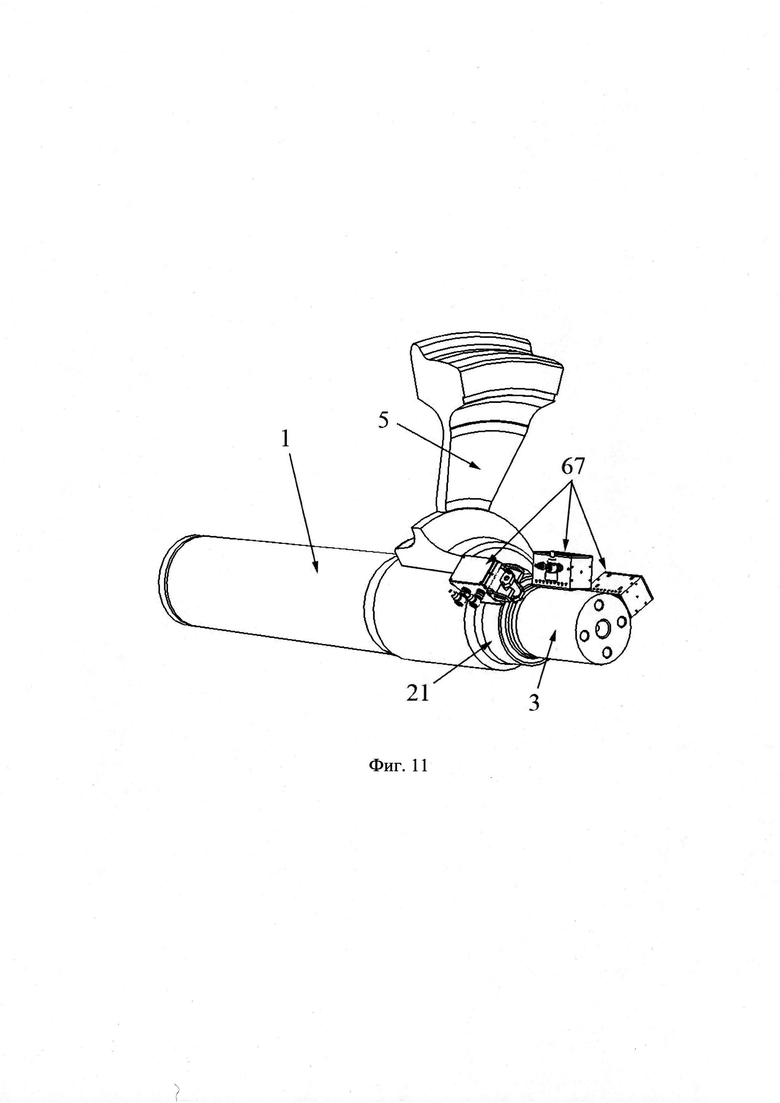
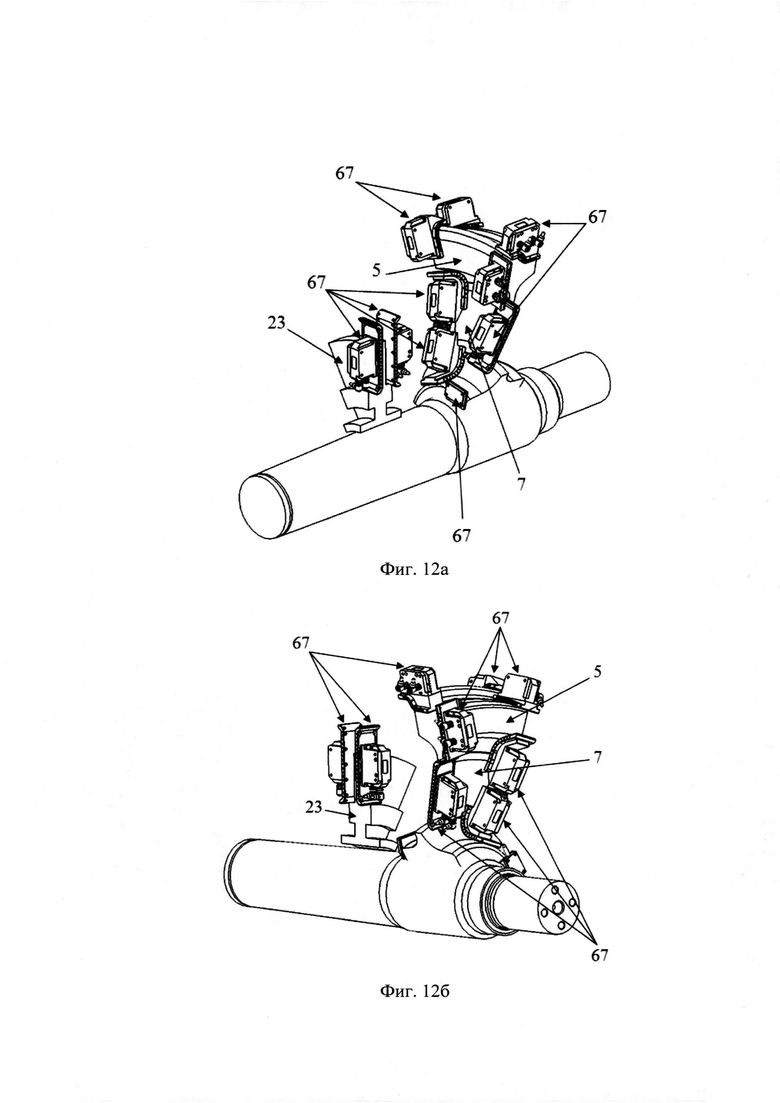
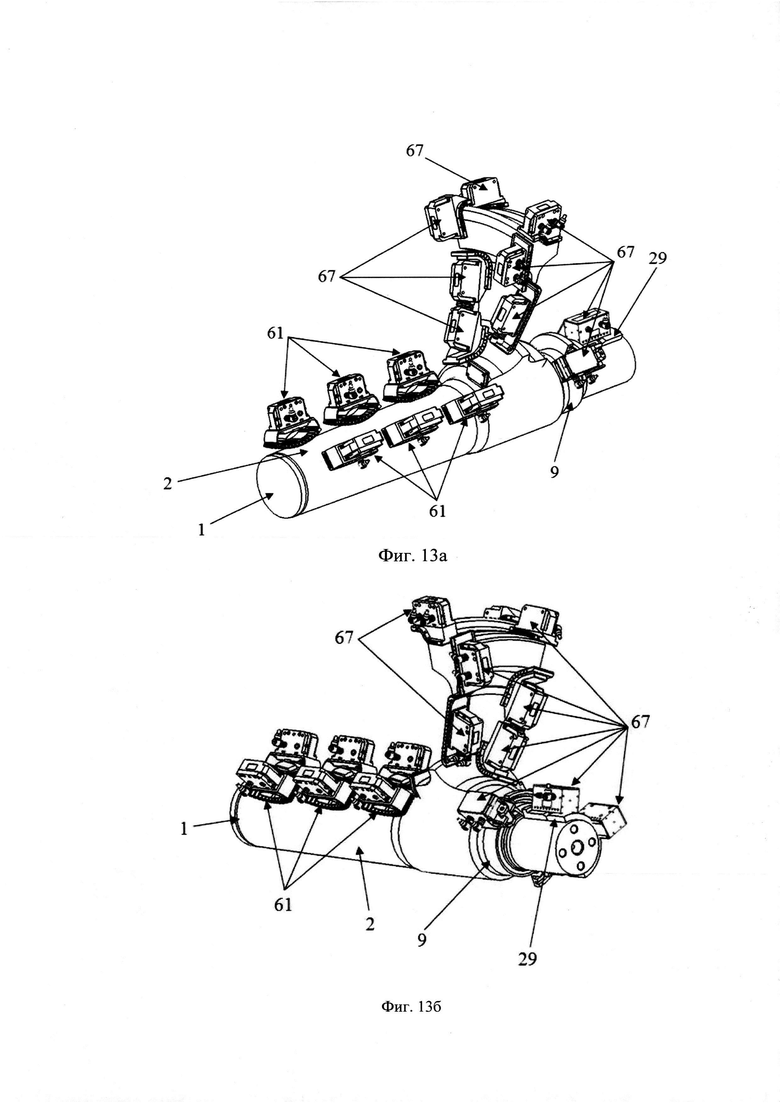
Изобретение предназначено для применения в области ультразвукового и вихретокового неразрушающего контроля колесных пар вагонов рельсового транспорта, в том числе для неразрушающего контроля колесных пар грузовых, пассажирских вагонов, тягового и мотор-вагонного железнодорожного подвижного состава, вагонов метрополитена, вагонов трамвая, вагонов рельсового автобуса. В автоматизированном комплексе неразрушающего контроля колесных пар вагонов модуль вихретокового контроля колесной пары позволяет осуществлять контроль всей открытой поверхности колесной пары. При этом вихретоковый контроль осуществляется многоэлементными интегральными вихретоковыми преобразователями, содержащими дифференциальные вихретоковые преобразователи, расположенные друг над другом и развернутые друг относительно друга на угол около 90 градусов, что позволяет обнаруживать поверхностные дефекты произвольной ориентации. Кроме того, автоматизированный комплекс дополнительно содержит ультразвуковые преобразователи и многоэлементные интегральные вихретоковые преобразователи для контроля тормозных дисков колесной пары и модуль контроля полой оси колесных пар со стороны центрального отверстия. В результате повышается достоверность и производительность неразрушающего контроля колесных пар с различным профилем и составом ее элементов, достигается компактность комплекса. 25 ил.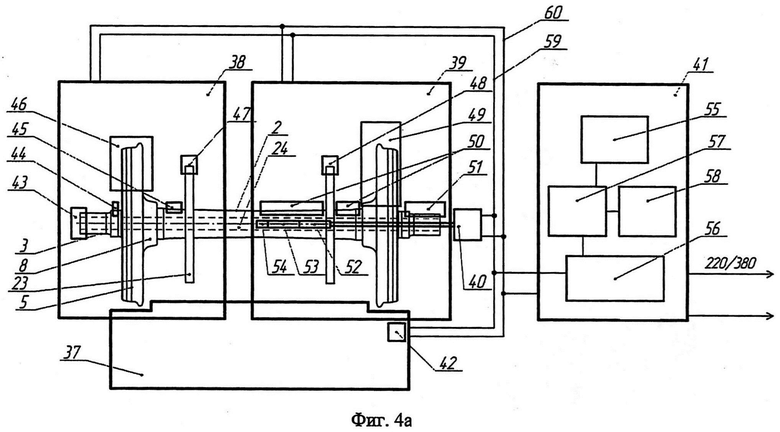
Автоматизированный комплекс неразрушающего контроля колесных пар вагонов, содержащий модуль подъемно-поворотного устройства, на котором установлены модуль ультразвукового и модуль вихретокового контроля колесной пары, модуль управления автоматизированным комплексом, электрически и пневматически связанный с модулем подъемно-поворотного устройства, модулями ультразвукового и вихретокового контроля колесной пары, при этом модуль подъемно-поворотного устройства выполнен с возможностью разворота вокруг своей оси на 180°, модуль ультразвукового контроля колесной пары содержит блок ультразвуковых преобразователей для контроля колеса, блок ультразвуковых преобразователей для контроля оси, блок подвода ультразвуковых преобразователей к объекту контроля, модуль вихретокового контроля колесной пары содержит блок вихретоковых преобразователей для контроля средней части оси, блок вихретоковых преобразователей для контроля колеса, блок вихретоковых преобразователей для контроля шейки оси или контроля поверхности колец подшипников, напрессованных на шейки оси, блок подвода вихретоковых преобразователей к объекту контроля, а блок управления автоматизированным комплексом содержит блок сбора и цифровой обработки сигналов, полученных от ультразвуковых и вихретоковых преобразователей, блок сбора информации об объекте контроля, монитор блока интерфейса пользователя и визуализации, выполненный на базе компьютера, отличающийся тем, что модуль вихретокового контроля колесной пары дополнительно содержит блоки вихретокового контроля всей открытой поверхности колесной пары и тормозных дисков, включающие блок вихретоковых преобразователей для контроля поверхности катания колеса, блок вихретоковых преобразователей для контроля средней части диска колеса с внутренней и наружной сторон, блок вихретоковых преобразователей для контроля галтельного перехода от диска к ободу колеса с наружной стороны, блок вихретоковых преобразователей для контроля галтельного перехода от диска к ступице колеса с внутренней стороны, блоки вихретокового контроля тормозных дисков колесной пары, модуль ультразвукового контроля колесной пары дополнительно содержит блоки ультразвуковых преобразователей для контроля тормозных дисков колесной пары, кроме того, автоматизированный комплекс дополнительно содержит модуль ультразвукового, вихретокового и электронно-оптического контроля полой оси колесной пары, включающий в себя блок ультразвуковых преобразователей, блок вихретоковых преобразователей, блок оптического контроля полой оси, при этом модуль подъемно-поворотного устройства, модуль ультразвукового контроля колесной пары, модуль вихретокового контроля колесной пары, модуль ультразвукового, вихретокового и электронно-оптического контроля полой оси колесной пары, блок подвода ультразвуковых преобразователей к объекту контроля, модуль управления автоматизированным комплексом образуют единую конструкцию в рамках одного поста неразрушающего контроля, а каждый вихретоковый преобразователь выполнен в виде многоэлементных интегральных преобразователей, состоящих из набора по крайней мере одного комплекта многослойных одноэлементных дифференциальных вихретоковых преобразователей и многослойного абсолютного вихретокового преобразователя, размещенных на единой подложке печатной платы, при этом в каждом комплекте друг над другом в любой последовательности расположен набор их четырех вихретоковых преобразователей в интегральном исполнении, а именно первый дифференциальный вихретоковый преобразователь для обнаружения продольных дефектов, база которого расположена поперек направления сканирования объекта контроля, второй дифференциальный вихретоковый преобразователь для обнаружения поперечных дефектов, база которого развернута примерно ортогонально в параллельной плоскости относительно базы первого дифференциального вихретокового преобразователя для обнаружения продольных дефектов, третий дифференциальный вихретоковый преобразователь, установленный со смещением зоны контроля относительно зоны контроля первого дифференциального вихретокового преобразователя и с их частичным перекрытием зоны нечувствительности первого дифференциального вихретокового преобразователя для обнаружения продольных дефектов, четвертый абсолютный вихретоковый преобразователь для измерения зазора между поверхностью объекта контроля и первым, вторым и третьим дифференциальными вихретоковыми преобразователями, при этом для контроля элементов колесной пары со сложным и простым профилем в модуле вихретокового контроля колесной пары установлены контактные многоэлементные интегральные вихретоковые преобразователи с эластичной поверхностью, способные повторять профиль контролируемой поверхности и бесконтактные многоэлементные интегральные вихретоковые преобразователи с жесткой поверхностью, при этом каждый контактный многоэлементный интегральный вихретоковый преобразователь с эластичной поверхностью и каждый бесконтактный многоэлементный интегральный вихретоковый преобразователь с жесткой поверхностью содержат блок первичной обработки информации, соединенный с модулем управления автоматизированным комплексом, при этом блок управления автоматизированным комплексом дополнительно содержит блок банка архива сигналов от реальных дефектов колесных пар, содержащий параметры, ранее полученные экспериментальным путем, сигналов от реальных дефектов, выполненный с возможностью сравнения сигналов, полученных в процессе неразрушающего контроля колесной пары, с сигналами, содержащимися в блоке банка архива сигналов от реальных дефектов колесный пар, при совпадении с одним из которых блок управления автоматизированным комплексом выполнен с возможностью идентификации такого сигнала, как дефект в конкретном элементе контролируемой колесной пары.
| Передвижной растворный узел | 1948 |
|
SU84565A1 |
| US 5659248 A, 19.08.1997 | |||
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ КОЛЕСНЫХ ПАР ВАГОНОВ | 2008 |
|
RU2380698C1 |
| Конвейер для сборки мелких механизмов, например, карманных и наручных часов, с магазинами-накопителями | 1956 |
|
SU113365A1 |

