Область техники
Настоящее изобретение относится к области технических решений по подавлению вибраций и, в частности, к магнитореологическому виброизолятору, регулируемому посредством ультразвукового двигателя.
Уровень техники
Исполнительные устройства инерциальной системы ориентации, такие как управляющие гироскопы, широко используются в высокоточных космических аппаратах, таких как спутники дистанционного зондирования и космические лаборатории, и являются изделиями для космических аппаратов, наиболее важными для обеспечения быстрой корректировки углового положения и устойчивости ориентации. При быстром развитии аэрокосмической технологии требования пользователей к эксплуатационным характеристикам спутников (например, к разрешению камер) становятся все более высокими, и полезные нагрузки, которые позволяют обеспечить характеристики спутников, обуславливают все более высокие требования к точности угловой ориентации и устойчивости космической платформы. Однако в процессе высокоскоростного вращения роторы исполнительных устройств инерциальной системы ориентации будут генерировать колебания в широком диапазоне частот и с микроамплитудой, которые становятся одним из основных источников вибраций космического аппарата и влияют на точность углового положения и устойчивость космического аппарата и на бесшумность платформы, что приводит к воздействию в определенной степени на обеспечение эксплуатационных характеристик полезных нагрузок. Следовательно, стабильно работающая платформа является необходимым условием нормальной работы полезных нагрузок, таких как датчики с высокими характеристиками.
Подавление микровибраций представляет собой эффективный способ повышения устойчивости платформы. Однако при решениях по уменьшению вибраций, направленных на конструкцию исполнительных устройств инерциальной системы ориентации, таких как управляющие гироскопы, затруднено обеспечение положительного эффекта подавления микровибраций, и изоляция микровибраций на пути передачи вибраций является относительно простой и эффективной. Пружинящие резиновые демпферы или резинометаллические демпферы с металлической пружиной, как правило, используются для виброизоляции. Однако на резину сильно влияют температура и частота, и резина не является стойкой к космическому облучению и коррозии, вызываемой атомарным кислородом, в то время как резинометаллические элементы имеют сильную нелинейность и имеют разные коэффициенты демпфирования и жесткость при большой амплитуде и малой амплитуде, что неудобно для проектирования. Кроме того, когда их конструкции заданы, коэффициент демпфирования по существу невозможно изменить, что создает затруднения при удовлетворении требований в разных средах и условиях работы. Традиционные магнитореологические и электрореологические жидкостные демпферы могут обеспечить активное регулирование демпфирования при необходимости, но они требуют долгосрочного источника энергии, что приводит к увеличению затрат на их использование на орбите. Следовательно, требуются исследование и разработка изоляторов с переменным демпфированием, в которых предусмотрено разделение функции демпфирования и функции обеспечения жесткости, демпфирование является регулируемым, энергопотребление является низким и которые могут адаптироваться к разным средам на земле и на орбите и являются стойкими к облучению и коррозии, вызываемой атомарным кислородом.
В традиционных гидравлических демпферах главным образом используются односторонний поршневой шток или двусторонние поршневые штоки для обеспечения перемещения поршня для выдавливания текучей среды с целью обеспечения некоторой степени жидкостного демпфирования. С учетом неизбежного зазора между штоком и уплотняемой полостью существует неизбежная микроутечка жидкости, которая не только приводит к снижению характеристик жидкостного демпфирования, но и также может вызвать загрязнение окружающей среды в спутнике, в результате чего затруднено удовлетворение требования долговременной работы традиционных гидравлических демпферов.
Энергопотребление при традиционном способе использования магнитореологической текучей среды для демпфирования обусловлено главным образом использованием электроспирали для генерирования магнитного поля, при этом интенсивность магнитного поля регулируется посредством величины тока, что приводит к изменению кинематической вязкости магнитореологической текучей среды в отверстиях и, следовательно, к регулированию демпфирования. Когда ток в спирали исчезает, магнитное поле также исчезает, и магнитное поле, необходимое для магнитореологической текучей среды, не может поддерживаться. То есть требуется постоянная подача электрического тока к спирали, что вызывает потребление большого количества электроэнергии.
Сущность изобретения
Техническая проблема, подлежащая решению посредством настоящей заявки, состоит в преодолении недостатков известного уровня техники, в разработке магнитореологического виброизолятора, регулирование которого осуществляется посредством ультразвукового двигателя и который лучше адаптирован к окружающим условиям в космическом пространстве, может обеспечить переменное демпфирование, осуществляемое виброизолятором, при уменьшенных затратах, связанных, например, с массой и потреблением энергии, и подавить вибрации в широком диапазоне частот, генерируемые или испытываемые исполнительными устройствами инерционной системы ориентации, такими как управляющие гироскопы, в разных средах и при разных условиях работы.
Техническое решение согласно настоящей заявке таково. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, включает в себя основание, множество магнитореологических демпферов и множество переходных плит, при этом каждая из множества переходных плит соединена с основанием посредством множества магнитореологических демпферов и выполнена с возможностью соединения с устройством, подлежащим виброизоляции;
при этом каждый из множества магнитореологических демпферов включает в себя нижнюю закрывающую плиту, нижнюю полость, соединительное кольцо, постоянный магнит, отверстия, верхнюю полость, верхнюю закрывающую плиту, верхний шток, верхний сальник, парамагнитный компонент, нижний сальник, магнитопроводящее кольцо, фиксирующее кольцо, корпус, ультразвуковой двигатель и нижний шток; и
один конец верхнего штока соединен с соединительным кольцом для функционирования в качестве выходного конца или входного конца для виброизоляции, и верхний шток соединен с переходной плитой; нижний шток установлен в средней части нижней закрывающей плиты для функционирования в качестве входного конца или выходного конца для виброизоляции, и нижний шток соединен с основанием; нижняя закрывающая плита и верхняя закрывающая плита соединены посредством корпуса; соединительное кольцо приварено к гофрированным трубам для образования нижней полости и верхней полости, и нижняя полость и верхняя полость заполнены магнитореологической текучей средой; соединительное кольцо разделено в направлении вдоль окружности на 2n одинаковых зон, каждая из которых имеет центральный угол, составляющий π/n, где n - натуральное число, множество отверстий распределены в одной зоне из каждых двух соседних зон из 2n зон, и отверстия отсутствуют в другой зоне из данных двух соседних зон; магнитопроводящее кольцо установлено с наружной стороны соединительного кольца, постоянный магнит и парамагнитный компонент установлены с внутренней стороны соединительного кольца попеременно, и постоянный магнит и парамагнитный компонент установлены на выходном валу ультразвукового двигателя посредством верхнего сальника и нижнего сальника; одна гофрированная труба из гофрированных труб, которая определяет границы нижней полости, расположена с наружной стороны ультразвукового двигателя, конец нижней полости и конец верхней полости плотно закрыты посредством соответственно нижней закрывающей плиты и верхней закрывающей плиты для обеспечения параллельного соединения гофрированных труб, соответствующих нижней полости и верхней полости, и, когда входной конец и выходной конец, предназначенные для виброизоляции, перемещаются друг относительно друга под действием нагрузки, соединительное кольцо перемещается вверх и вниз относительно корпуса, и магнитореологическая текучая среда, находящаяся в нижней полости и верхней полости, выдавливается из одной из нижней полости и верхней полости в другую через отверстия.
Силовые линии магнитного поля постоянного магнита образуют петлю за счет прохождения через соединительное кольцо и магнитопроводящее кольцо, ультразвуковой двигатель обеспечивает поворот постоянного магнита и парамагнитного компонента; когда постоянный магнит и отверстия перекрываются в направлении вдоль окружности, магнитное поле, создаваемое между постоянным магнитом и магнитопроводящим кольцом, проходит через отверстия для обеспечения усиления магнитного поля в отверстиях в зоне перекрытия, и кинематическая вязкость магнитореологической текучей среды в отверстиях в зоне перекрытия увеличивается, и величина демпфирования, обеспечиваемого магнитореологическим виброизолятором, регулируется посредством регулирования числа отверстий, находящихся в магнитном поле.
Ультразвуковой двигатель работает в непрерывном режиме или шаговом режиме, и датчик углового смещения используется для обратной связи; когда ультразвуковой двигатель работает в шаговом режиме, датчик нулевого положения используется для калибровки углового положения ротора ультразвукового двигателя, угол поворота постоянного магнита рассчитывается посредством подсчета числа шагов ультразвукового двигателя, и определяется степень перекрытия между постоянным магнитом и отверстиями в направлении вдоль окружности для получения коэффициента демпфирования, обеспечиваемого демпфирующим виброизолятором.
После обеспечения поворота постоянного магнита на заданный угол ультразвуковой двигатель может быть выключен и подвергнут самоблокировке, и демпфирующий виброизолятор работает в состоянии пассивной виброизоляции при малом потреблении электроэнергии.
Число магнитореологических демпферов и угол наклона каждого из магнитоэлектрических демпферов определены на основе характеристик объекта, подлежащего виброизоляции, и требований к виброизоляции.
Каждый из постоянного магнита и парамагнитного компонента имеет веерообразную конструкцию с U-образным поперечным сечением.
Каждый из постоянного магнита и парамагнитного компонента имеет центральный угол, составляющий π/n, в каждой из зон.
Преимущества решения по настоящей заявке над известным уровнем техники таковы.
1. В решении по настоящей заявке используется полость для удерживания магнитореологической текучей среды, образованная посредством гофрированным труб, и средняя часть и два конца полости используются в качестве входного и выходного концов для виброизоляции. Под действием вибрации входной конец и выходной конец перемещаются друг относительно друга, так что средняя часть перемещается относительно данных двух концов, и текучая среда сдавливается для прохождения в верхней и нижней полостях, таким образом, демпферы обеспечивают имитацию движения поршней в состоянии без динамических и статических зазоров, что обеспечивает жидкостное демпфирование и позволяет избежать утечки жидкости, вызываемой динамическими и статическими зазорами традиционных демпферов, и, следовательно, данное решение подходит для длительных применений в космосе.
2. В гравитационном поле, например, на земле и в тому подобных условиях, магнитные частицы, суспендированные в магнитореологической текучей среды, легко осаждаются, и для магнитных частиц требуется особая обработка для модификации поверхности. В настоящей заявке магнитореологическая текучая среда применяется для изделий, используемых в космическом пространстве, и, следовательно, находится в состоянии невесомости, так что не будет происходить легкого осаждения суспендированных магнитных частиц, что может обеспечить лучшее сохранение однородности магнитореологической текучей среды и может обеспечить лучшее проявление характеристики активного регулирования демпфирования посредством магнитореологической текучей среды.
3. В демпфере согласно настоящей заявке используется ультразвуковой двигатель для обеспечения поворота постоянного магнита для регулирования числа отверстий, входящих в магнитное поле, для обеспечения приблизительно линейного регулирования демпфирования, осуществляемого магнитореологическим демпфером. Поскольку источником магнитного поля, предусмотренного в настоящей заявке, является постоянный магнит, отсутствует необходимость в использовании тока для генерирования магнитного поля. Ультразвуковой двигатель обеспечивает только поворот постоянного магнита для изменения распределения отверстий относительно магнитного поля, и после обеспечения поворота постоянного магнита на определенный угол ультразвуковой двигатель может быть выключен и подвергнут самоблокировке, и электроэнергия почти не будет потребляться. В этом случае демпфер работает в состоянии пассивной виброизоляции. Энергопотребление эффективно уменьшается, и экономится ценная энергия для космического аппарата.
4. В демпфере согласно настоящей заявке используется ультразвуковой двигатель для обеспечения поворота постоянного магнита. Приблизительно линейное регулирование демпфирования, осуществляемого демпфером, может быть обеспечено посредством регулирования степени перекрытия между постоянным магнитом и отверстиями, поскольку степень перекрытия линейно зависит от угла. Ультразвуковой двигатель использует колебания, вызываемые бегущими волнами, для обеспечения медленного движения, которое не зависит от вращающегося магнитного поля. Следовательно, магнитное поле постоянного магнита не влияет на ультразвуковой двигатель, в то время как постоянный магнит легко воздействует на электромагнитный двигатель. Кроме того, ультразвуковой двигатель может работать в шаговом режиме, когда требования к регулированию демпфирования невысокие, при этом может не потребоваться датчик углового смещения и может использоваться только датчик нулевого положения для простого управления, что позволяет упростить конструкцию демпфера.
5. Виброизолятор согласно настоящей заявке может рассеивать энергию вибраций, передаваемую от платформы спутника изделиям, таким как управляющие гироскопы в пусковом отсеке, для защиты данных изделий, и он также может уменьшить воздействие микровибраций, генерируемых в процессе работы изделий на платформе спутника, в орбитальном отсеке. Например, в таких процессах, как маневр управляющего гироскопа, ультразвуковой двигатель может использоваться для обеспечения перемещения постоянного магнита для увеличения демпфирующей силы, создаваемой магнитореологической текучей средой, увеличения рассеяния энергии вибраций и повышения устойчивости системы. Когда вибрация мала, например, в процессе, в котором управляющий гироскоп заблокирован или осуществляет медленный маневр, может быть осуществлена регулировка положения постоянного магнита для уменьшения демпфирующей силы с целью повышения коэффициента затухания высокочастотных вибраций, обеспечиваемого виброизолятором. Следовательно, виброизолятор может обеспечить активное регулирование демпфирования в соответствии с разными условиями применения и условиями колебаний, в результате чего достигаются хорошие характеристики виброизоляции.
6. В соответствии с конструкцией магнитореологического демпфера по настоящей заявке магнитореологическая текучая среда удерживается в полости, образованной гофрированными трубами, и средняя секция и два конца полости служат в качестве входного и выходного концов для виброизоляции для обеспечения имитации движения поршня в демпфере без динамических и статических зазоров, осуществляется прохождение текучей среды для обеспечения жидкостного демпфирования. Решение по заявке обеспечивает интеграцию жидкостного демпфирования, магнитного демпфирования и магнитореологического демпфирования и осуществление регулировки величины магнитореологического демпфирования посредством использования ультразвукового двигателя для обеспечения поворота постоянного магнита.
Краткое описание чертежей
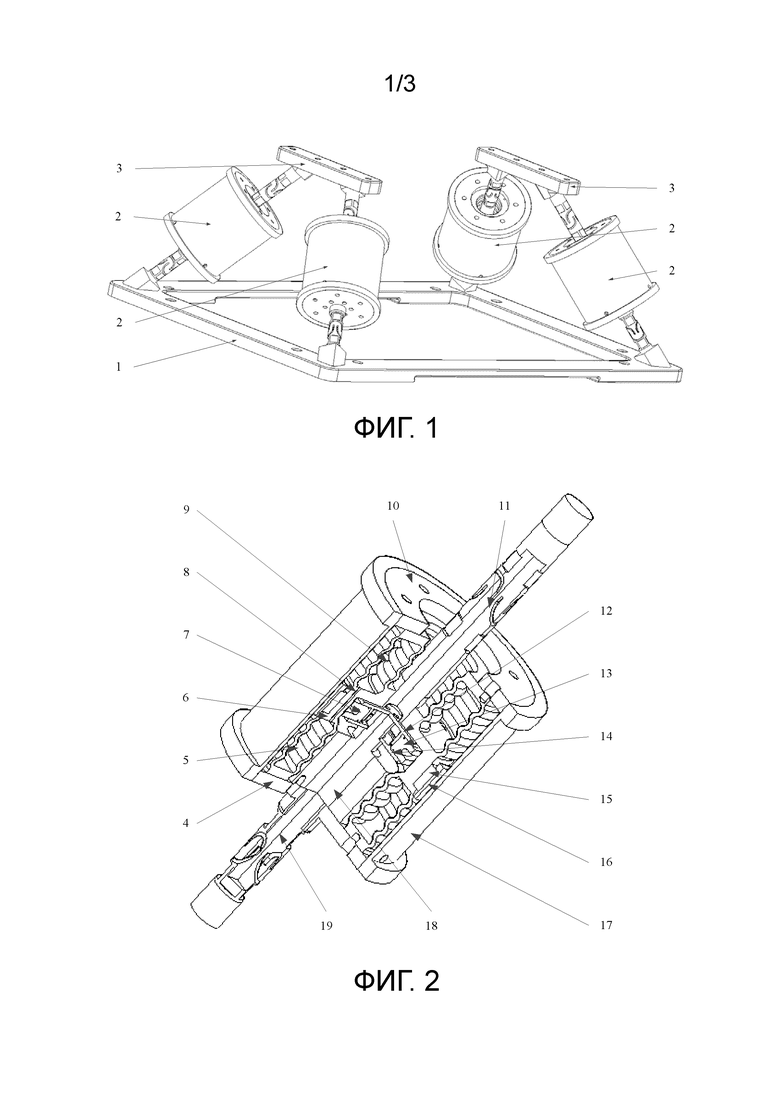
Фиг.1 - схематический вид, показывающий конструкцию виброизолятора с переменным демпфированием согласно настоящей заявке;
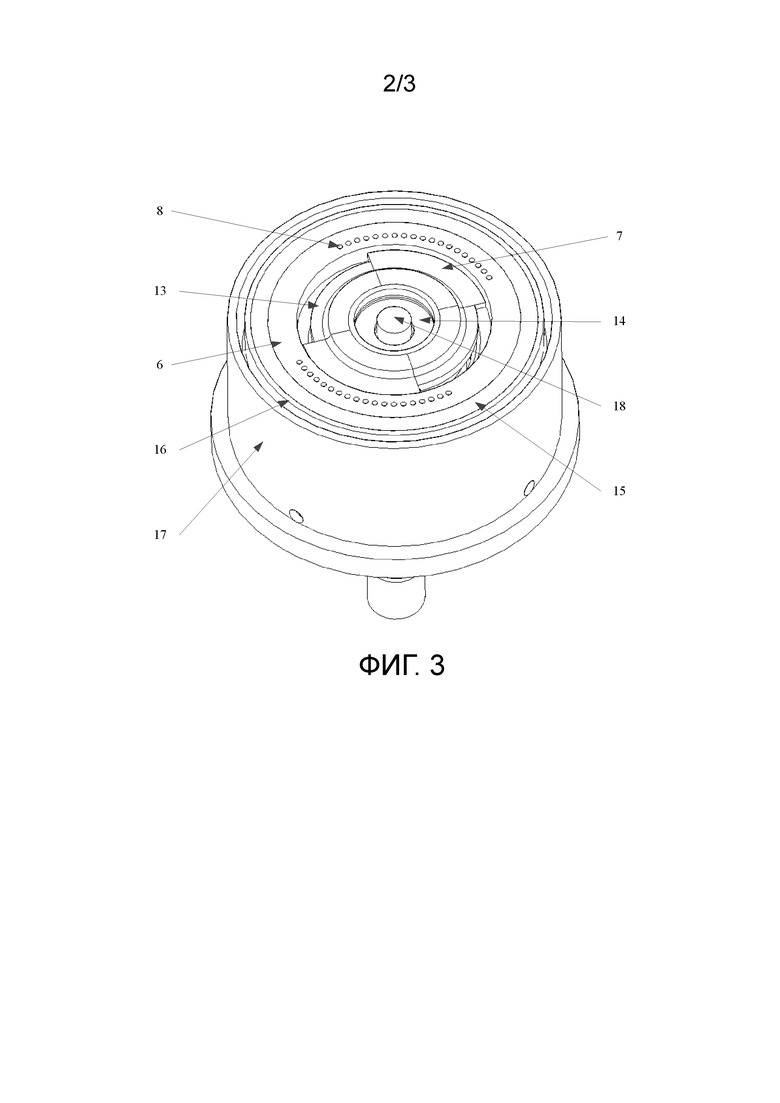
фиг.2 - вид с продольным разрезом, показывающий конструкцию демпфера с переменным демпфированием согласно настоящей заявке;
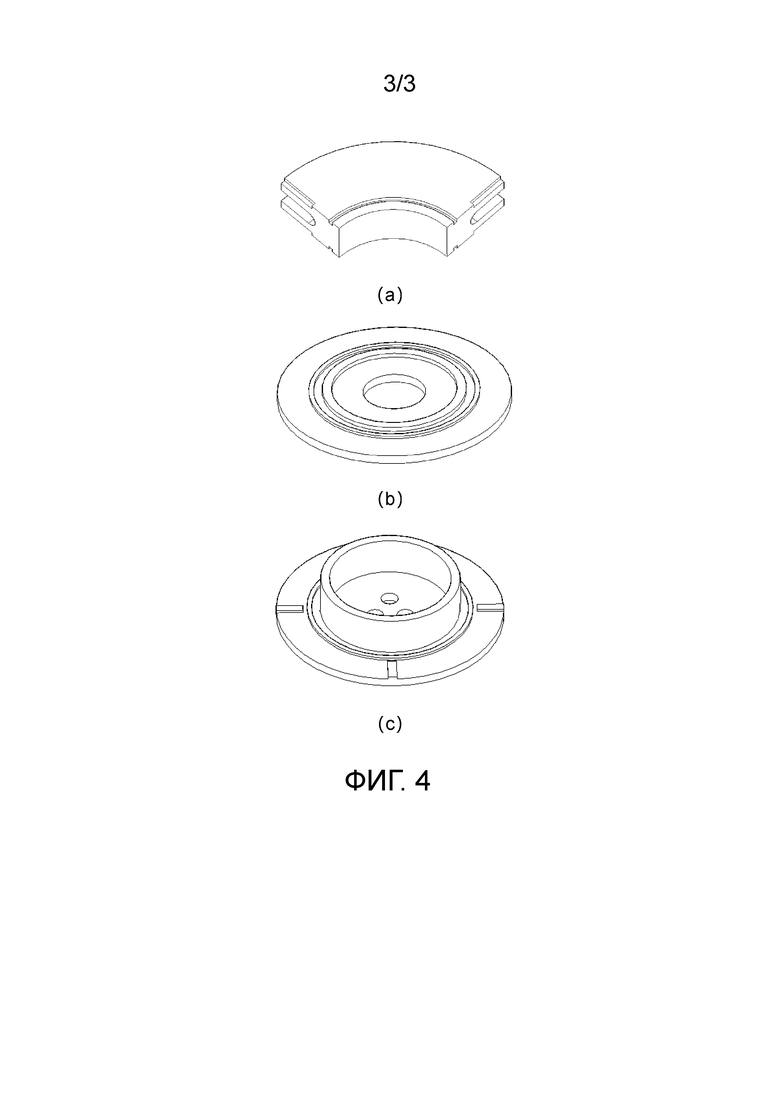
фиг.3 - вид с поперечным разрезом, показывающий конструкцию демпфера с переменным демпфированием согласно настоящей заявке;
фиг.4(а) - схематический вид, показывающий конструкцию постоянного магнита и парамагнитного компонента согласно настоящей заявке;
фиг.4(b) - схематический вид, показывающий конструкцию верхнего сальника согласно настоящей заявке; и
фиг.4(с) - схематический вид, показывающий конструкцию нижнего сальника согласно настоящей заявке.
Подробное описание вариантов осуществления изобретения
Эффект виброизоляции, обеспечиваемый виброизолятором, тесно связан с демпфированием, осуществляемым виброизолятором. Виброизоляция с малым демпфированием может обеспечить эффективную изоляцию высокочастотных вибраций, в то время как виброизоляция с большим демпфированием может обеспечить быстрое рассеяние энергии вибраций с большой амплитудой, таких как при резонансе. Следовательно, вибрации, передаваемые от платформы спутника к исполнительным устройствам, таким как управляющие гироскопы в пусковом отсеке, могут эффективно подавляться для защиты изделий. Кроме того, вибрации с большой амплитудой, генерируемые исполнительными устройствами, такими как управляющие гироскопы, в орбитальном отсеке во время процесса маневрирования, также могут подавляться. Следовательно, в настоящей заявке предложен способ виброизоляции с переменным демпфированием, в котором ультразвуковой двигатель используется для обеспечения поворота постоянного магнита для регулирования степени перекрытия между магнитным полем и отверстиями с целью существенного повышения вязкости магнитореологической текучей среды, поступающей в отверстия, находящиеся в магнитном поле, посредством чего виброизолятор осуществляет виброизоляцию с переменным демпфированием, то есть в соответствии с настоящей заявкой предложен магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя.
Как показано на фиг.1, магнитореологический виброизолятор согласно настоящей заявке, регулируемый посредством ультразвукового двигателя, включает в себя основание 1, магнитореологические демпферы 2 и переходную плиту 3. Конструкция основания 1 определена на основе способа установки платформы космического аппарата и др., и конструкция переходной плиты 3 определена на основе соединительного порта объекта, подлежащего виброизоляции, такого как управляющий гироскоп. Основание 1 соединено посредством винтов с нижними штоками 19 магнитореологических демпферов 2, и переходная плита 3 соединена посредством винтов с верхними штоками 11 магнитореологических демпферов 2. Параметры, такие как число и углы наклона магнитореологических демпферов 2, оптимизированы и определены в зависимости от конкретных условий, таких как характеристики объекта, подлежащего виброизоляции, и требования к виброизоляции.
Как показано на фиг.2, 3 и 4а-4с, каждый из магнитореологических демпферов 2 включает в себя нижнюю закрывающую плиту 4, нижнюю полость 5, соединительное кольцо 6, постоянный магнит 7, отверстия 8, верхнюю полость 9, верхнюю закрывающую плиту 10, верхний шток 11, верхний сальник 12, парамагнитный компонент 13, нижний сальник 14, магнитопроводящее кольцо 15, фиксирующее кольцо 16, корпус 17, ультразвуковой двигатель 18 и нижний шток 19. Соединительное кольцо 6 соединено с двумя гофрированными трубами, соответствующими нижней полости 5 и верхней полости 9, посредством электроннолучевой сварки для образования соответственно нижней полости 5 и верхней полости 9, которые заполнены магнитореологической текучей средой.
2n зон, каждая из которых имеет центральный угол, составляющий π/n, равномерно распределены в направлении вдоль окружности соединительного кольца 6, при этом n - натуральное число, в данном варианте осуществления n=2. Множество отверстий 8 распределены в одной зоне из каждых двух соседних зон из 2n зон, и отверстия 8 отсутствуют в n зонах, каждая из которых имеет центральный угол, составляющий π/n, и которые расположены между зонами, в которых распределены отверстия. Магнитопроводящее кольцо 15 установлено с наружной стороны соединительного кольца 6, постоянные магниты 7 и парамагнитные компоненты 13 установлены с внутренней стороны соединительного кольца 6 попеременно, и центральный угол каждого из постоянных магнитов 7 и центральный угол каждого из парамагнитных компонентов 13 составляют π/n в каждой зоне. Постоянные магниты 7 и парамагнитные компоненты 13 установлены на выходном валу ультразвукового двигателя 18 посредством верхнего сальника 12 и нижнего сальника 14.
Силовые линии магнитного поля U-образного постоянного магнита 7 могут образовывать петлю за счет прохождения через соединительное кольцо 6 и магнитопроводящее кольцо 15. Когда магнитореологическая текучая среда не находится в магнитном поле, кинематическая вязкость магнитореологической текучей среды представляет собой только кинематическую вязкость обычной жидкости, и демпфирование, обеспечиваемое демпфером, осуществляется как обычное жидкостное демпфирование и магнитное демпфирование; когда магнитореологическая текучая среда находится в магнитном поле, она подвергается воздействию магнитного поля, и кинематическая вязкость магнитореологической текучей среды будет существенно увеличена, и демпфирование осуществляется как магнитореологическое демпфирование и магнитное демпфирование, при этом магнитореологическое жидкостное демпфирование значительно больше магнитного демпфирования. В настоящей заявке ультразвуковой двигатель 18 используется для обеспечения поворота постоянных магнитов 7 и парамагнитных компонентов 13. Когда каждый из постоянных магнитов 7 перекрывает соответствующие отверстия 8 в направлении вдоль окружности, силовые линии магнитного поля, имеющиеся между постоянным магнитом 7 и магнитопроводящим кольцом 15, проходят через отверстия 8, так что магнитное поле значительно усиливается в отверстиях 8 в зоне перекрытия, и кинематическая вязкость магнитореологической текучей среды, находящейся в отверстиях 8 в зоне перекрытия, значительно увеличивается. Величину демпфирования можно регулировать посредством регулирования размера зоны перекрытия, то есть регулирования числа отверстий 8, находящихся в магнитном поле. Когда постоянный магнит 7 и отверстия 8 полностью перекрывают друг друга в направлении вдоль окружности, число отверстий 8, находящихся в магнитном поле, является максимальным, и в этом случае демпфирование является наибольшим; когда постоянный магнит 7 и отверстия 8 не перекрываются в направлении вдоль окружности, число отверстий 8, находящихся в магнитном поле, является минимальным, и в этом случае демпфирование является наименьшим. Поскольку ультразвуковой двигатель 18 может обеспечить поворот на любой угол и степень перекрытия линейно зависит от угла поворота, магнитореологический жидкостный демпфер, в котором ультразвуковой двигатель используется для обеспечения поворота постоянного магнита для регулирования степени перекрытия между постоянным магнитом и отверстиями, имеет функцию приблизительно линейного регулирования демпфирования.
Ультразвуковой двигатель 18 может работать в непрерывном режиме или шаговом режиме, и датчик углового смещения может использоваться для измерения угла поворота ротора ультразвукового двигателя 18 и осуществления обратной связи по угловому смещению. Когда требования к управлению демпфированием невысоки, ультразвуковой двигатель 18 может работать в шаговом режиме, и только датчик нулевого положения используется для калибровки углового положения ротора ультразвукового двигателя 18. Угол поворота постоянного магнита 7 может быть рассчитан посредством подсчета числа шагов ультразвукового двигателя 18, и определяется степень перекрытия между постоянным магнитом 7 и отверстиями 8 в направлении вдоль окружности для получения коэффициента демпфирования, обеспечиваемого демпфером. Следовательно, управление без обратной связи может осуществляться согласно команде; в альтернативном варианте управление с обратной связью может осуществляться на основе величины вибраций, что упрощает конструкцию виброизолятора.
Нижняя закрывающая плита 4 и верхняя закрывающая плита 10 соединены друг с другом посредством корпуса 17 для формирования одного целого, и конец нижней полости 5 и конец верхней полости 9 плотно закрыты соответственно нижней закрывающей плитой 4 и верхней закрывающей плитой 10 для обеспечения параллельного соединения между гофрированными трубами, соответствующими нижней полости 5 и верхней полости 9. Нижняя закрывающая плита 4 и нижний шток 19 соединены посредством резьб, резьба на наружном конце нижнего штока 19 служит в качестве средства для установки внешнего устройства, чтобы данный наружный конец служил в качестве входного конца или выходного конца для виброизоляции. Соединительное кольцо 6 в средней части соединено с верхним штоком 11 посредством резьб, и резьба на наружном конце верхнего штока 11 служит в качестве средства для установки внешнего устройства, чтобы данный наружный конец служил в качестве выходного конца или входного конца для виброизоляции. Когда имеет место перемещение входного конца и выходного конца друг относительно друга под действием нагрузок, таких как вибрации, соединительное кольцо 6 перемещается вверх и вниз относительно корпуса 17 и т.д., и магнитореологическая текучая среда выдавливается для протекания между нижней полостью 5 и верхней полостью 9, и трение в магнитореологической текучей среды и трение между магнитореологической текучей средой и поверхностями отверстий 8 создают демпфирующую силу. Данная конструкция обеспечивает имитацию движения поршня демпфера в состоянии без динамических и статических зазоров, что может лучше гарантировать отсутствие утечки во время длительной работы на орбите.
Ультразвуковой двигатель 18 используется в магнитореологическом демпфере 2 для приведения постоянного магнита 7 в движение для изменения распределения магнитного поля относительно отверстий 8 и регулирования степени перекрытия между постоянным магнитом 7 и отверстиями 8, то есть для изменения величины демпфирования, осуществляемого демпфером, посредством регулирования числа отверстий 8, входящих в магнитное поле постоянного магнита 7. Источником магнитного поля является постоянный магнит 7, и для создания магнитного поля не требуется электрический ток. Ультразвуковой двигатель 18 используется только для обеспечения поворота постоянного магнита 7 для изменения распределения магнитного поля, и после поворота постоянного магнита 7 на заданный угол ультразвуковой двигатель 18 выключается и подвергается самоблокировке, и не потребляется почти никакая энергия. В этом случае демпфер в работает в состоянии пассивной виброизоляции. Эффективно уменьшается энергопотребление, и экономится энергия для космического аппарата.
В состоянии невесомости не происходит легкого осаждения магнитных частиц, суспендированных в магнитореологической текучей среды, что может обеспечить лучшее сохранение однородности магнитореологической текучей среды, и может лучше выполняться регулирование демпфирования, осуществляемое магнитореологическим жидкостным демпфером.
Когда вибрация является относительно большой, в частности, в таких процессах, как маневр управляющего гироскопа, постоянный магнит 7 может быть приведен в движение посредством ультразвукового двигателя 18 для увеличения степени перекрытия между постоянным магнитом 7 и отверстиями 8 в направлении вдоль окружности, что обеспечивает увеличение демпфирующей силы, создаваемой магнитореологической текучей средой, улучшение рассеяния энергии вибраций и посредством этого повышение устойчивости системы; когда вибрация является относительно малой, например, в процессе, в котором управляющий гироскоп зафиксирован или маневрирует медленно, может быть осуществлена регулировка положения постоянного магнита 7 для уменьшения степени перекрытия между постоянным магнитом 7 и отверстиями 8 в направлении вдоль окружности, что обеспечивает уменьшение демпфирующей силы, создаваемой магнитореологической текучей средой, уменьшение степени демпфирования и, следовательно, повышение скорости затухания высокочастотной вибрации, обеспечиваемого виброизолятором. При обеспечении поворота постоянного магнита 7 на определенный угол ультразвуковой двигатель 18 может быть выключен, в этом случае демпфер работает в состоянии пассивной виброизоляции. Можно видеть, что в течение всего процесса за исключением ситуации, когда требуется потребление электроэнергии ультразвуковым двигателем 18 для приведения в движение постоянного магнита 7, ультразвуковой двигатель 18 выключен и подвергнут самоблокировке почти без потребления энергии, когда не требуется поворот постоянного магнита 7. Следовательно, потребление энергии демпфером является малым, что позволяет эффективно уменьшить расход энергии. Не только выполняется функция активно регулируемого демпфирования, но и также эффективно уменьшается потребление ценной электроэнергии демпфером. Каждый из постоянного магнита 7 и парамагнитного компонента 13 имеет веерообразную конструкцию с U-образным поперечным сечением.
Ультразвуковой двигатель 18 использует колебания, вызываемые бегущими волнами, для обеспечения медленного движения, которое не зависит от вращающегося магнитного поля, и, следовательно, магнитное поле не влияет на него, что позволяет устранить проблему, связанную с тем, что постоянный магнит легко воздействует на электромагнитный двигатель. Кроме того, ультразвуковой двигатель 18 не имеет магнитных элементов и не имеет катушек/спиралей, следовательно, он не будет создавать магнитное поле, имеющее большую величину, и не будет влиять на характеристики демпфирования, обеспечиваемые магнитореологическим демпфером 2.
Содержание, не описанное подробно в настоящей заявке, принадлежит к техническим решениям, которые хорошо известны специалистам в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВИБРОИЗОЛЯЦИИ | 2019 |
|
RU2727918C1 |
| АКУСТИЧЕСКИЕ УСТРОЙСТВА И ИХ МАГНИТНЫЕ ЦЕПИ | 2021 |
|
RU2797645C1 |
| ЗДАНИЕ СЕЙСМОСТОЙКОЕ С КИРПИЧНОЙ СТЕНОВОЙ ПАНЕЛЬЮ | 2015 |
|
RU2624842C2 |
| ЗДАНИЕ СЕЙСМОСТОЙКОЕ КОЧЕТОВА С КИРПИЧНОЙ СТЕНОВОЙ ПАНЕЛЬЮ | 2015 |
|
RU2658934C2 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| ПРОСТРАНСТВЕННЫЙ ВИБРОИЗОЛЯТОР КАРКАСНОГО ТИПА | 2017 |
|
RU2668754C1 |
| ПРОСТРАНСТВЕННЫЙ ВИБРОИЗОЛЯТОР КАРКАСНОГО ТИПА | 2017 |
|
RU2661632C1 |
| СИСТЕМА ВИБРОИЗОЛЯЦИИ ДЛЯ СУДОВЫХ ДВИГАТЕЛЕЙ | 2016 |
|
RU2624114C1 |
| ВИБРОИЗОЛЯТОР КОРАБЕЛЬНЫЙ С ПАРАЛЛЕЛЬНО СОЕДИНЕННЫМИ УПРУГОДЕМПФИРУЮЩИМИ ЭЛЕМЕНТАМИ | 2017 |
|
RU2651378C1 |
Изобретение относится к виброизоляторам. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, содержит основание (1), магнитореологический демпфер (2) и переходную плиту (3). Магнитореологический демпфер включает в себя верхнюю полость (9), нижнюю полость (5), соединительное кольцо (6), постоянный магнит (7), отверстия (8), магнитопроницаемое кольцо (15), ультразвуковой двигатель (18). Магнитореологическая текучая среда удерживается в верхней и нижней полостях, образованных посредством сильфонов, и средняя часть и оба конца полости используются в качестве входного и выходного концов для виброизоляции для обеспечения имитации движения поршня в демпфере без динамических и статических зазоров с целью обеспечения прохождения текучей среды и обеспечения жидкостного демпфирования, и виброизолятор не имеет утечки при работе на орбите в течение продолжительного времени. В магнитореологическом демпфере используется ультразвуковой двигатель (18) для обеспечения поворота постоянного магнита (7) для регулирования степени перекрытия между постоянным магнитом (7) и отверстиями (8), то есть для регулирования числа отверстий (8), входящих в магнитное поле постоянного магнита, для изменения интенсивности демпфирования, обеспечиваемого демпфером. Обеспечивается улучшение эксплуатационных характеристик. 6 з.п. ф-лы. 4 ил.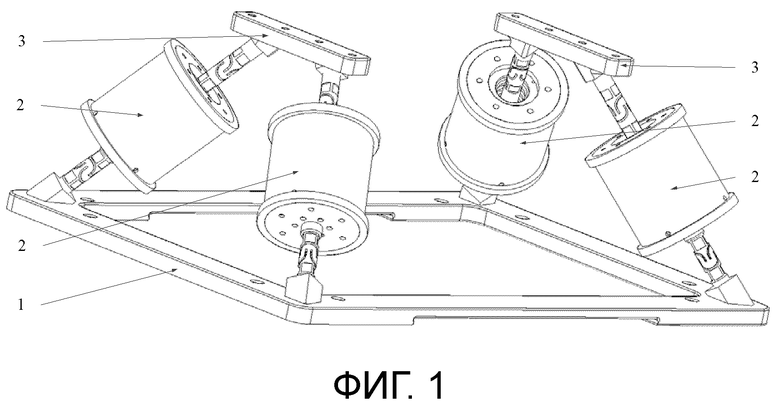
1. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя и содержащий:
основание (1);
множество магнитореологических демпферов (2); и
множество переходных плит (3), при этом:
каждая из множества переходных плит (3) соединена с основанием (1) посредством множества магнитореологических демпферов (2) и выполнена с возможностью соединения с устройством, подлежащим виброизоляции;
каждый из множества магнитореологических демпферов (2) содержит нижнюю закрывающую плиту (4), нижнюю полость (5), соединительное кольцо (6), постоянный магнит (7), отверстия (8), верхнюю полость (9), верхнюю закрывающую плиту (10), верхний шток (11), верхний сальник (12), парамагнитный компонент (13), нижний сальник (14), магнитопроводящее кольцо (15), фиксирующее кольцо (16), корпус (17), ультразвуковой двигатель (18) и нижний шток (19);
один конец верхнего штока (11) соединен с соединительным кольцом (6) для функционирования в качестве выходного конца или входного конца для виброизоляции, и верхний шток (11) соединен с переходной плитой (3); нижний шток (19) установлен в средней части нижней закрывающей плиты (4) для функционирования в качестве входного конца или выходного конца для виброизоляции, и нижний шток (19) соединен с основанием (1); нижняя закрывающая плита (4) и верхняя закрывающая плита (10) соединены посредством корпуса (17);
соединительное кольцо (6) приварено к гофрированным трубам для образования нижней полости (5) и верхней полости (9), и нижняя полость (5) и верхняя полость (9) заполнены магнитореологической текучей средой; соединительное кольцо (6) разделено в направлении вдоль окружности на 2n одинаковых зон, каждая из которых имеет центральный угол, составляющий π/n, при этом n - натуральное число, по меньшей мере часть отверстий (8) распределены в одной зоне из каждых двух соседних зон из 2n зон, и отверстия (8) отсутствуют в другой зоне из этих двух соседних зон; магнитопроводящее кольцо (15) установлено с наружной стороны соединительного кольца (6), постоянный магнит (7) и парамагнитный компонент (13) установлены с внутренней стороны соединительного кольца (6) попеременно, и постоянный магнит (7) и парамагнитный компонент (13) установлены на выходном валу ультразвукового двигателя (18) посредством верхнего сальника (12) и нижнего сальника (14);
одна гофрированная труба из гофрированных труб, которая определяет границы нижней полости (5), расположена с наружной стороны ультразвукового двигателя (18), конец нижней полости (5) и конец верхней полости (9) плотно закрыты посредством соответственно нижней закрывающей плиты (4) и верхней закрывающей плиты (10) для обеспечения параллельного соединения гофрированных труб, соответствующих нижней полости (5) и верхней полости (9), и
в случае когда входной конец и выходной конец, предназначенные для виброизоляции, перемещаются относительно друг друга под действием нагрузки, соединительное кольцо (6) перемещается вверх и вниз относительно корпуса (17), и магнитореологическая текучая среда, находящаяся в нижней полости (5) и верхней полости (9), выдавливается из одной из нижней полости (5) и верхней полости (9) в другую через отверстия (8).
2. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, по п.1, в котором
силовые линии магнитного поля постоянного магнита (7) образуют петлю за счет прохождения через соединительное кольцо (6) и магнитопроводящее кольцо (15), ультразвуковой двигатель (18) выполнен с возможностью обеспечения поворота постоянного магнита (7) и парамагнитного компонента (13);
в случае когда постоянный магнит (7) и отверстия (8) перекрываются в направлении вдоль окружности, магнитное поле, создаваемое между постоянным магнитом (7) и магнитопроводящим кольцом (15), проходит через отверстия (8) для обеспечения усиления магнитного поля в отверстиях (8) в зоне перекрытия, и кинематическая вязкость магнитореологической текучей среды в отверстиях (8) в зоне перекрытия увеличивается, и
величина демпфирования, обеспечиваемого магнитореологическим виброизолятором, регулируется посредством регулирования числа отверстий (8), находящихся в магнитном поле.
3. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, по п.1 или 2, в котором ультразвуковой двигатель (18) работает в непрерывном режиме или шаговом режиме, и датчик углового смещения используется для обратной связи; в случае когда ультразвуковой двигатель (18) работает в шаговом режиме, датчик нулевого положения используется для калибровки углового положения ротора ультразвукового двигателя (18), угол поворота постоянного магнита (7) рассчитывается посредством подсчета числа шагов ультразвукового двигателя (18), и определяется степень перекрытия между постоянным магнитом (7) и отверстиями (8) в направлении вдоль окружности для получения коэффициента демпфирования, обеспечиваемого виброизолятором.
4. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, по п.3, в котором после обеспечения поворота постоянного магнита (7) на заданный угол, обеспечивается возможность выключения и самоблокировки ультразвукового двигателя (18), и виброизолятор работает в состоянии пассивной виброизоляции.
5. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, по п.1, в котором число магнитореологических демпферов (2) и угол наклона каждого из магнитоэлектрических демпферов (2) определены на основе характеристик устройства, подлежащего виброизоляции, и требований к виброизоляции.
6. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, по п.1, в котором каждый из постоянного магнита (7) и парамагнитного компонента (13) имеет веерообразную конструкцию с U-образным поперечным сечением.
7. Магнитореологический виброизолятор, регулируемый посредством ультразвукового двигателя, по п.6, в котором каждый из постоянного магнита (7) и парамагнитного компонента (13) имеет центральный угол, составляющий π/n, в каждой из 2n зон.
| CN 108974382 A, 11.12.2018 | |||
| DE 102008058358 A1, 27.05.2010 | |||
| Холодильный аппарат | 1951 |
|
SU96197A1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ И ЭЛЕКТРОСТАТИЧЕСКИЙ ДЕМПФЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2656232C1 |

