Изобретение относится к авиационной технике, в частности, к самолетостроению и вертолетостроению и может быть использовано при создании самолетов вертикального взлета и посадки, способных летать быстро и далеко, а также производить вертикальный взлет и посадку как на неподготовленную площадку на суше, так и на водную поверхность и производить спасательные и монтажные работы на режиме висения, как обычный вертолет.
Известен гидросамолет (амфибия) «Бе-200», РФ (интернет - википедия) с реактивными двигателями, который может производить взлет и посадку на земную поверхность, как обычный самолет, имея обычное самолетное шасси и как «гидро» производить взлет и посадку на воду и передвигаться по водной поверхности, имея нижнюю часть фюзеляжа, выполненную с кильватостью. Данный гидросамолет с успехом используется для транспортных полетов в труднодоступные районы, особенно в северных районах, где много озер и рек, и для тушения пожаров с воздуха. Также возможно применение как гидросамолета - спасателя при спасении гибнущих кораблей и подводных лодок в открытом море на большом расстоянии от берега.
Но как известно из статистики - большинство аварий и катастроф на море происходит в плохую, как правило, в штормовую погоду. Самолет «Бе-200» может производить посадку на воду и взлетать с нее лишь при высоте волны не выше 1,2 м. Значит при худших условиях он может прилететь, посмотреть сверху как гибнет судно, сфотографировать, уточнить место гибели и улететь обратно. И, если вблизи нет другого судна, особенно в холодное время года, гибель людей неминуема.
Известен вертолет - амфибия «Ми-14 ПС», РФ (интернет-википедия), поисково-спасательный с реактивными двигателями, одновинтовой схемы, который может производить взлет и посадку на земную поверхность, как обычный вертолет, имея обычные шасси, и как «гидро», производить взлет и посадку на воду и передвигаться по водной поверхности, имея нижнюю часть фюзеляжа выполненную с кильватостью, как у катера. Вертолет оборудован радиолокатором кругового обзора, подъемными лебедками и другим поисково-спасательным оборудованием для поиска и спасения терпящих бедствие морских судов и их экипажей. Вертолет может производить спасательные работы путем посадки на воду вблизи терпящего бедствие судна и подруливания к нему по воде при высоте волны не выше 0,8 м. Но при большом волнении посадка, взлет и передвижения по воде вертолета невозможны. В таком случае спасательные работы производятся на режиме висения. При этом вертолету желательно зависать на высоте начала влияния «воздушной подушки», равной радиусу несущего винта. Это уменьшает потребную мощность двигателей, необходимую для висения, уменьшает вертикальную скорость воздушного потока от воздушного винта, что улучшает возможность проведения спасательных работ, и при этом данный воздушный поток значительно разбивает и уменьшает высоту волн, что также улучшает условия проведения спасательных работ.
Но при всех положительных возможностях вертолет имеет один, но очень существенный недостаток - вертолет может работать только в прибрежной зоне, т.к. он не может быстро и далеко улететь к месту аварии из-за его относительно малой скорости полета, а вследствие этого потребного большого количества времени на полет, недостаток количества топлива для полета на большое расстояние и значит с помощью такого вертолета невозможно решать спасательные работы на большом расстоянии от его места базирования.
Известен проект:
«Гидросамолет вертикального взлета и посадки», патент RU 2549588, содержащий центроплан, две консоли крыла, силовую установку, фюзеляжи - лодки с встроенными в их конструкцию надувными поплавками и кабинами экипажа, горизонтальное и разнесенное вертикальное оперение, струйные рули, отличающиеся тем, что центроплан имеет форму обратного V, а в центроплане в центре тяжести самолета содержится пакет реактивных двигателей с устройством для отклонения вектора тяги их вниз. Устройство для отклонения вектора, являющееся продолжением выпускного тракта двигателей, отличающееся тем, что выпускной тракт, переходящий в квадратное или прямоугольное сечение, в зависимости от количества двигателей в пакете, направляет поток газов вниз под углом 90, образуя свод, поверхность которого образована поверхностями поворотных лопаток, обращенными к выпускному тракту, а с другой стороны лопатки имеют форму верхней части профиля крыла, при этом выход для газового потока снабжен рядом поворотных заслонок.
Из анализа данного технического предложения видно, что данный гидросамолет вертикального взлета и посадки (СВВП) может летать, как «сухопутный» самолет вертикального взлета и посадки, и как гидросамолет, взлетающий вертикально с водной поверхности с помощью газового потока от двигателей, направленного вниз, при этом в выходящем из двигателей в атмосферу газовом потоке происходит мгновенное падение давления и, вследствие этого, резко уменьшается температура в газовом потоке, но все же на расстоянии 2.5-3 м от выходного сопла у большинства двигателей она будет еще достаточно большой 150-250 С и более (по статистическим данным испытаний), что влияет на подстилающую поверхность и условия взлета. Но главное не только в температуре газов, а в сильном вертикальном газовом потоке в виде узкой газовой струи от двигателей, которая превращает водную поверхность под самолетом в «бурлящий котел» с быстрым наполнением водного участка под самолетом воздушными пузырьками, отчего вода теряет плотность и самолет, если не успеет быстро взлететь, начнет погружаться в воду и может утонуть. То же самое произойдет, если самолет быстро не успеет приводниться при вертикальной посадке. Этот вопрос специально прорабатывался с ЦАГИ и были даны рекомендации и заключение.
Данный гидросамолет также из-за сильного газового потока от двигателей не может производить спасательные и монтажные работы на режиме висения.
Также существуют большие сложности управления таким самолетом при продолжительном висении на газовом потоке и при продолжительном висении на режиме работы двигателей, близком к максимальному, происходит большой расход топлива.
Известен самолет вертикального взлета и посадки (СВВП) с прикрепленными на концах крыльев турбореактивными двигателями с несущими винтами с жесткими лопастями. При вертикальном взлете после отрыва от земли двигатели вместе с несущими винтами плавно разворачиваются из вертикального положения в горизонтальное, увеличивается горизонтальная скорость движения и СВВП превращается в обычный самолет. По этой схеме построены СВВП V - 22 "Osprey" («Оспрей») США, (Кузнецов К.Д. «Конвертоплан Белл-Боинг «Оспрей», «Крылья Родины», Москва, 2017 г., №3-4), скорость горизонтального полета в самолетном режиме достигает 500 км/час, скорость в вертолетном режиме достигает 180 км/час. Но данный самолет имеет ряд существенных недостатков.
Основным недостатком «Оспрей» по заявлению эксплуатирующих организаций является то, что: «он не очень надежен с его сложными переходными режимами. А единственным надежным летательным аппаратом остается обычный вертолет, что подтверждается многочисленными авариями и катастрофами летательных аппаратов «Оспрей», (Зарубежная экспресс-информация по авиационной технике, журнал, 2019 г., интернет.)
Но из-за отсутствия лучшей конструкции СВВП, данный самолет запущен в производство, но эксплуатируется только в армии США. Недостатком указанного СВВП является также то, что воздушные винты больше самолетных, но меньше вертолетных. Чтобы иметь наибольший взлетный вес, необходимы винты большого диаметра, но с большим винтом невозможно получить большую горизонтальную скорость. Поэтому приходится выбирать винты средних размеров. Что дает определенное увеличение горизонтальной скорости, но из-за того, что винты меньше вертолетных, то вертикальный воздушный поток от данных винтов будет значительно сильнее, чем от аналогичного по взлетному весу вертолета, одновременно в том же направлении идет сильный воздушный поток горячих газов от выхлопа реактивных двигателей, что делает практически невозможным использование указанных СВВП при спасательных и монтажных работах на режиме висения. Также на данном СВВП затруднительно производить вертикальные посадки на неподготовленные площадки, вследствие сильных вертикальных воздушных потоков от несущих винтов и реактивных двигателей, которые будут образовывать сильный пыльный и снежный вихрь, в котором летчик теряет видимость земли, что может привести к аварии при посадке.
Известен патент RU 2594321 "Аэродинамический профиль несущей поверхности летательного аппарата», имеющий выпукло-вогнутый профиль с хвостовиком, который позволяет эластичной лопасти несущего винта сворачиваться (наматываться) на катушку барабана без повреждения кромок лопасти, превращая несущий винт в компактную конструкцию, а при работе несущий винт с таким поперечным профилем лопастей имеет улучшенный КПД винта и позволяет иметь длинные лопасти, более всех ограничений.
Имеется патент RU 2668482 "Несущий винт летательного аппарата со сворачивающимися убираемыми лопастями». Данный несущий винт содержит вал главного редуктора, к верхнему концу которого прикреплена горизонтально расположенная втулка несущего винта с приливами по количеству лопастей. В каждом приливе установлен вертикальный шарнир, к которому прикреплен осевой шарнир, к которому, в свою очередь, прикреплен барабан с расположенной внутри катушкой, к которой прикреплена комлевой частью эластичная лопасть. Лопасти несущего винта имеют выпукло-вогнутый профиль с хвостовиком, позволяющий компактно без перекосов и поломок кромок лопастей синхронно сворачиваться- наматываться на катушки барабанов и разворачиваться с них с помощью системы регулируемой уборки и выпуска лопастей. К другому концу каждой лопасти прикреплен центробежный груз со стабилизатором с управляемым серворулем. Лопасти с таким профилем могут быть увеличенной длины, более всех ограничений. При вращении несущего винта на каждую лопасть действуют центробежные силы от массы центробежного груза (совместно со стабилизатором и серворулем) и от массы самой лопасти, которые растягивают лопасть в продольном направлении и создают ей аэродинамическую жесткость. Стабилизатор с серворулем, прикрепленные на конце лопасти, при вращении несущего винта находятся в зоне максимальной воздушной скорости, поэтому они максимально эффективны. При одновременном отклонении установочных углов комлевой части лопасти (барабана) с помощью автомата перекоса и концевой части лопасти с помощью управляемого серворуля и электромеханической системы управления им, каждая лопасть работает, как обычная жесткая лопасть у обычного вертолета.
Известен патент RU 2727787 "Самолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями» содержащий фюзеляж с кабиной пилотов, крыло с элементами и механизацией для взлета и посадки, хвостовое оперение в виде стабилизатора с рулем высоты и килей с рулями направления, шасси для передвижения по земной поверхности, реактивный маршевый двигатель и имеется несущий винт с силовой установкой для вертикального взлета и посадки, отличающийся тем, что самолет имеет несущий винт со сворачивающимися убираемыми лопастями, прикрепленными на концах лопастей центробежными грузами и управляемыми серворулями и несущий винт прикреплен к редуктору несущего винта, который имеет привод от силовой установки, состоящий из реактивных двигателей и несущий винт со свернутыми на барабаны лопастями на земле или в полете в самолетном режиме закрывается обтекаемыми капотами, а крутящий момент от несущего винта при его работе парируется воздушным потоком, отклоняемым воздушными створками от маршевого двигателя и крыло самолета выполнено с отклоняемой частью вниз от 0 до 90 для уменьшения сопротивления и потерь тяги винта при вертикальном взлете и посадке от воздушного потока несущего винта. При этом, профиль лопастей несущего винта выполнен выпукло-вогнутым с одинаковой кривизной верхней и нижней поверхностей и имеющий хвостовик. Данный профиль позволяет лопастям, с помощью специальной системы уборки и выпуска, синхронно и плавно сворачиваться на барабаны без перекосов и поломок кромок лопастей, а после уборки лопастей, складываются стабилизаторы и серворули, превращая несущий винт в компактную конструкцию и при работе управление несущим винтом осуществляется с помощью автомата перекоса и системы управления серворулями.
Предложенный самолет с убранными лопастями несущего винта способен летать с большой скоростью и далеко, а с выпущенными лопастями на режиме висения, осуществлять спасательные и монтажные работы, как обычный вертолет одновинтовой схемы. Но данный самолет - «сухопутный», а таким самолетам не разрешается работать на режиме висения над водной поверхностью, т.к. в случае отказа техники, он упадет в воду и утонет.
Задачей предложенного изобретения является создание гидросамолета вертикального взлета и посадки (ГСВВП), способного далеко и быстро летать, вести поиск гибнущих морских судов и производить спасательные работы этих судов на большом удалении от берега, также и при штормовых условиях погоды, и при необходимости вести монтажные работы в открытом море.
Известный патент RU 2727787 "Самолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями», являющийся ближайшим аналогом к заявленному изобретению взят за прототип.
Также взят за прототип известный гидросамолет с реактивными двигателями «Бе - 200», (амфибия), РФ, интернет.
Также взят за прототип патент RU №2668482 от 18.07.2017 г.«Несущий винт летательного аппарата со сворачивающимися убираемыми лопастями».
Также взят за прототип патент RU №2594321 от 20.05.2015 г. «Аэродинамический профиль несущей поверхности летательного аппарата».
Технический результат, на решение которого направлено изобретение, является разработка гидросамолета вертикального взлета и посадки, способного как вертолет, за счет несущего винта взлетать и производить посадку на неподготовленную площадку и водную поверхность, производить спасательные, монтажные и другие виды работ на режиме висения, а как самолет с убранными лопастями несущего винта после взлета, летать как обычный самолет быстро и далеко.
Сущность изобретения поясняется чертежами, на которых изображено следующее:
на фиг. 1 - представлен общий вид ГСВВП по изобретению, вид сбоку
на фиг. 2 - представлен общий вид ГСВВП по изобретению с выпущенными лопастями несущего винта, вид сверху.
На фиг. 3-представлен общий вид ГСВВП по изобретению с показом установки крыла самолета в вертикальное положение под 90 вниз и с частично открытым капотом несущего винта, вид спереди.
На фиг. 4 - представлена конструкция сворачивающейся убираемой лопасти несущего винта.
На фиг. 5 - сечение по А-А комлевой плоской части лопасти.
На фиг. 6 - сечение по Б-Б промежуточной части лопасти.
На фиг. 7 - сечение по С-С основной рабочей части лопасти.
На фиг. 8 - поперечный разрез центробежного груза с показом механизма уборки и установки в рабочее положение стабилизатора.
На фиг. 9 - показан центробежный груз с показом отклонений серворуля при работе несущего винта и при уборке лопасти и складывании руля.
На фиг. 10- показан несущий винт со сворачивающимися убираемыми лопастями, одна лопасть- вид сверху, лопасть убрана - свернута на барабане, пунктиром показан конец лопасти в частично выпущенном положении.
На фиг. 11 - показан несущий винт со сворачивающимися убираемыми лопастями (одна лопасть), вид сбоку лопасть убрана - свернута на барабане, пунктиром показан конец лопасти в частично выпущенном положении.
На фиг. 12 - показан барабан с вырезами и сечениями с видом на элементы системы ограничения углов взмаха лопасти.
На фиг. 13 - показана центральная часть катушки барабана в разрезе с элементами системы ограничения углов взмаха лопасти.
На фиг. 14 - показана принципиальная схема сворачивания лопасти на барабан с показом элементов внутри барабана системы ограничения углов взмаха лопасти.
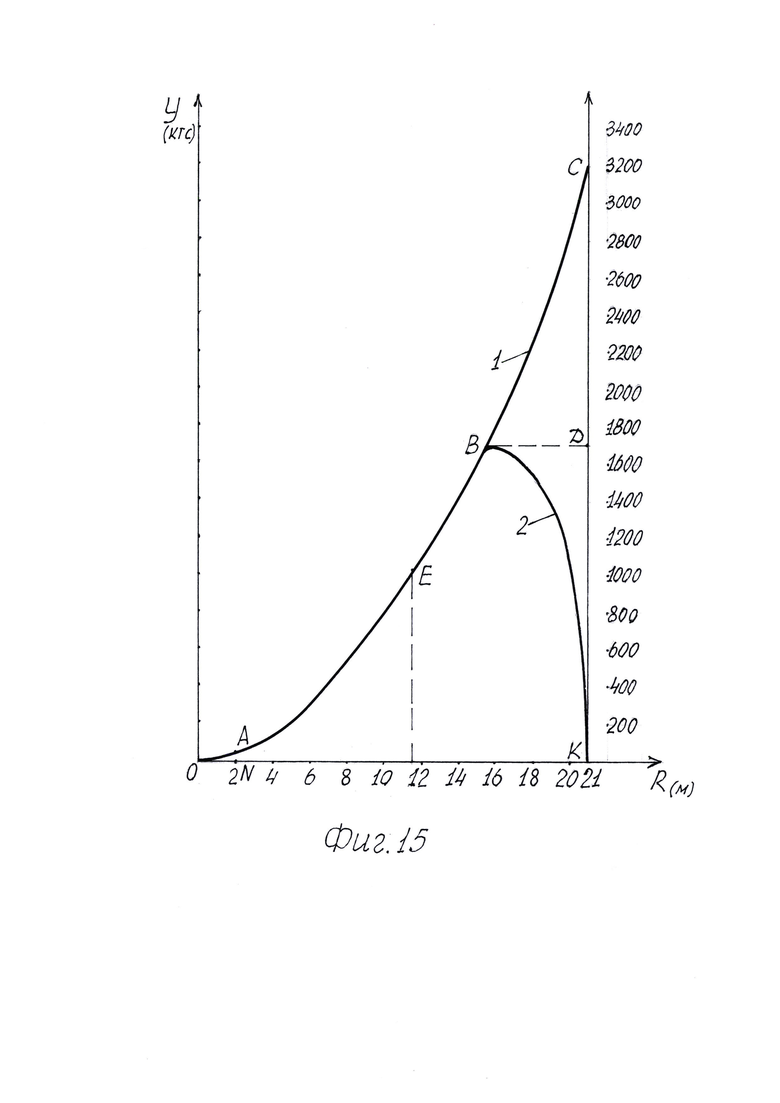
На фиг. 15 - показан график сравнения распределения подъемной силы по длине сворачивающейся лопасти и жесткой лопасти равной длины и одинаковой площади. 1 - кривая ABC-сворачивающаяся лопасть несущего винта; 2 - кривая АВК - жесткая лопасть несущего винта.
Гидросамолет вертикального взлета и посадки содержит: 1 - фюзеляж с кабиной пилотов; 2 - передняя силовая неподвижная часть крыла; 3 - отклоняемая часть крыла; 3' - положение отклоняемой части крыла при полете ГСВВП на переходном режиме и малой скорости; 3'' - отклоненное положение вниз под 90 отклоняемой части крыла; 4 - отклоняемые предкрылки; 5 - элероны; 6 - отклоняемые закрылки на плоскостях крыльев, 6' - отклоняемые закрылки, прикрепленные к нижним частям правого и левого частям центроплана; 7 - плоскости стабилизатора горизонтального оперения; 8 - плоскости руля высоты; 9 - плоскости килей вертикального оперения; 10 - плоскости рулей направления; 11 - реактивный маршевый двигатель с управляемыми поверхностями выхлопного сопла; 12 - воздухозаборник реактивного маршевого двигателя; 13 - автомат перекоса; 13' - редуктор несущего винта; 13'' - втулка несущего винта; 14 - барабаны несущего винта; 14' - тяга автомата перекоса; 14'' - рычаг барабана; 15 - подъемные двигатели силовой установки несущего винта; 13''' муфта сцепления привода подъемного двигателя 15 с приводом 14''' редуктора 13' несущего винта.
Конструкция редуктора несущего винта ГСВВП с системой синхронной, плавной и регулируемой системой выпуска и уборки несущего винта выполнена аналогично редуктору несущего винта и системы синхронной, плавной и регулируемой системы выпуска и уборки лопастей несущего винта описанной в патентах RU 2594321 от 21.05.2015 г.; RU 2668482 от 18.07.2017 г. и RU 2727787 от 29.08.2019 г.
16 - сворачивающиеся убираемые лопасти несущего винта; 17 - центробежный груз, прикрепленный на конце лопасти; 17' - внутренняя силовая балка центробежного груза; 18 - стабилизатор, прикрепленный к центробежному грузу;
18' - положение стабилизатора в убранном положении; 19 - серворуль, прикрепленный к стабилизатору; 19'-19'' - отклонение серворуля при работе несущего винта; 19''' - положение серворуля при убранном положении лопасти; 20 - лопасть несущего винта свернута на барабан и стабилизатор и серворуль сложены (убраны); 21 - капоты, закрывающие несущий винт с убранными лопастями;
22 - капоты несущего винта в открытом (сложенном) положении; 23 - шасси гидросамолета;
24 - нижняя часть фюзеляжа с кильватостью; 25 - редан нижней части фюзеляжа; 26 - поддерживающие боковые поплавки; 27-28 - ось поворота отклоняемой части крыла;
29 - осевой шарнир барабана; 29' - вертикальные шарниры втулки несущего винта; 29'' - катушка индуктивности системы управления серворулем 19 и управляемым триммером 31 лопасти несущего винта;
30 - двигатель реверсивного типа для отклонения серворуля 19; 31 - управляемый триммер лопасти несущего винта; 31' - гибкий валик управления триммером; 32 - двигатель реверсивного типа для отклонения управляемого триммера лопасти;
33 - сумматор сигналов электрических токов (процессор) - устройство обработки и управления электрических сигналов системы управления серворулем 19 и управляемым 31;
34 - катушка барабана, являющееся его внутренней частью; 34' - скользящий электроконтакт на катушке барабана; 35 - щека катушки барабана; 36 - срез щеки катушки для размещения управляемого триммера при сворачивании лопасти; 37 - передняя упрочненная часть ленты лопасти; 38 - нервюра лопасти; 39 - комлевая плоская часть лопасти, покрытая плотным эластичным материалом; 40 - переходной участок лопасти; 41 - основная часть лопасти, заполненная легким эластичным ячеистым материалом и имеющая поперечный выпукло-вогнутый профиль с хвостовиком 41' согласно патента RU №2594321 от 21.07.2016 г.;
42 - передняя часть нервюры лопасти; 43 - жгут электрических проводов, прикрепленный внутри лопасти; 43' - жгут электрических проводов, прикрепленный внутри центробежного груза; 44 - механизм уборки и установки в рабочее положение стабилизатора с электродвигателем реверсивного типа и самотормозящейся червячной передачей 44', закрепленные внутри центробежного груза 17; - угол конуса лопастей несущего винта;
45 - центр тяжести центробежного груза 17 совместно со стабилизатором 18 и серворулем 19;
46-47 - продольная ось вращения лопасти 16 с продольной осью центров тяжести элементов лопасти и продольной осью осевого шарнира 29 барабана 14 и центром вертикального шарнира 29' данной лопасти втулки 13'' несущего винта; R - радиус несущего винта; 48 - приемная штанга топлива для дозаправки ГСВВП в полете; 49 - два элипсовидных цилиндра осевой части барабана 14 - катушки 34 барабана; 50 - крепежная накладка; 51 - стяжное кольцо катушки барабана; 52 - вертикальная стойка внутри элипсовидных цилиндров; 53 - электромагнитные катушки с подпружиненными сердечниками - контактными датчиками отклонения лопасти 16 в вертикальной плоскости - ограничители углов взмаха.
На фиг. 4 представлена конструкция сворачивающейся убираемой лопасти 16 несущего винта, имеющая увеличенную длину - более 18 м, т.е. более ограничительных размеров по прочным характеристикам жестких лопастей в вертолетостроении.
При увеличении длины жесткой вертолетной лопасти более 18 м, лопасть из-за собственного веса при невращающемся несущем винте сильно изгибается вниз, это может привести к касанию хвостовой балки при остановке или начале вращения винта, или вообще может сломаться лонжерон лопасти, особенно в комлевой части, Чтобы этого не допустить, необходимо упрочнять лонжерон и комлевую часть лопасти, а значит будет увеличиваться вес самой лопасти, соответственно и вес втулки несущего винта. Также вес втулки будет увеличиваться и за счет упрочнения ее из-за увеличения центробежной силы, вследствие увеличения веса лопасти. Также увеличивается вес и от агрегатов управления лопастью. В итоге, увеличение веса лопасти, веса втулки несущего винта и прочих агрегатов управления лопастью полностью «съедает» прирост подъемной силы, а значит и тяги винта полученной от увеличения длины лопасти несущего винта.
Расчеты и обоснование данного явления были даны главным конструктором Московского вертолетного завода М.Л. Милем еще в начале 50х прошлого столетия при разработке и создании самого большого вертолета того времени Ми-6. В связи с этим несущий винт на вертолете Ми-6 имеет радиус 17,5 м и имеет самый большой прогиб лопастей из всех вертолетов того времени. В предложенном изобретении лопасти 16 несущего винта перед остановкой вращения винта убираются- сворачиваются на катушки 34, являющиеся внутренней частью барабанов 14 (для упрощения - лопасти сворачиваются на барабаны), а после выпуска лопастей, даже при вращении несущего винта с минимальными оборотами (минимальный режим работы), лопасти 16 удерживаются в горизонтальной плоскости (в плоскости вращения) за счет действия центробежных сил, от массы самой лопасти и от массы центробежного груза 17 совместно со стабилизатором 18 и серворулем 19.
Конструкция сворачивающейся убираемой лопасти 16 в предложенном изобретении на фиг. 4 выполнена аналогично представленной в патенте RU-2668482 от 18.07.2017 г. с дополнительной доработкой в виде управляемого триммера 31 прикрепленного к задней кромке в конце лопасти 16 и соединенного гибким валиком 31' с электродвигателем 32 реверсивного типа, прикрепленным к задней части центробежного груза 17, при этом, триммер изготовлен из гибкого материала в виде пластины, имеющей возможность сворачиваться вместе с лопастью, но имеющий определенную жесткость при изгибе в поперечном направлении и работа электродвигателя 32 управления триммером и его отклонением при работе несущего винта происходит синхронно с работой электродвигателя 30 управления серворулем 19 и его отклонением, и триммер 31 помогает серворулю 19 изменять моменты управления конца лопасти 16 увеличенной длины при изменении углов атаки, при этом, управляемый триммер 31, выступающий за пределы площади лопасти, при ее сворачивании складывается в вырез 36 в щеке 35 катушки 34 барабана 14 на последнем обороте лопасти 16. При работе несущего винта серворуль 19 и управляемый триммер 31, прикрепленные к концу лопасти расположены в зоне максимальной окружной скорости, поэтому обладают максимальной аэродинамической эффективностью. После полного выпуска лопастей несущего винта, система выпуска лопастей отключается и барабаны 14 получают свободу отклонения вокруг осевых шарниров 29, т.е. получают возможность изменять установочные углы комлевых частей лопастей 16. При работе несущего винта и отклонении барабана 14 с помощью автомата перекоса 13 на разные установочные углы, вместе с ним отклоняется и внутренняя часть катушки индуктивности 29'', прикрепленная к внешней части осевого шарнира 29. А внешняя часть катушки индуктивности 29'' прикреплена к внутренней части осевого шарнира 29. Вследствие этого в катушке возникает электрический ток, который через скользящий контакт 34', прикрепленный к задней части катушки 34 барабана 14 и жгут электрических проводов 43 прикрепленный внутри и вдоль лопасти 16 и жгут электрических проводов 43', прикрепленный внутри центробежного груза 17 передается к сумматору сигналов электрических токов 33 и далее на электродвигатели 30 и 32 реверсивного типа, отклоняя серворуль 19 и управляемый триммер 31 синхронно с отклонением комлевой части лопасти 16 на заданный угол установки. При вращении несущего винта от действия центробежных сил от масс самой лопасти 16, центробежного груза 17 совместно со стабилизатором 18 и серворулем 19, каждая лопасть растягивается в продольном направлении, при этом, растягиваются передняя и задняя кромки и создается необходимая аэродинамическая жесткость лопасти.
Общая центробежная сила, действующая на лопасть в 7-14 раз больше максимальной подъемной силы, создаваемой лопастью при работе винта и зависит от максимального взлетного веса вертолета, его назначения, условий его работы и радиуса несущего винта.
Крутильная жесткость вокруг продольной оси вращения 46-47 лопасти при работе винта, создается в комлевой части лопасти за счет крепления лопасти к катушке барабана 14, стабилизатора 18 на конце лопасти и натяжения кромок лопасти от действия центробежных сил, действующих на лопасть.
Отсутствие горизонтального шарнира в креплении барабана 14 к втулке 13'' несущего винта заменяется креплением комлевой части эластичной ленты лопасти к внутренней части катушки 34 барабана 14, как показано на фиг. 12, аналогично патента RU №2668482 от 18.07.17 г.
При работе несущего винта в полете при поступательном движении из-за разности скоростей движения лопастей в набегающем и отступающем воздушном потоке возникают маховые движения лопастей относительно втулки винта, которые частично устраняются с помощью автомата перекоса 13. Из-за маховых движений лопастей, возникают силы Кариолиса, которые стремятся ускорить или замедлить скорость движения (вращения) лопастей. Вследствие этого барабаны 14 имеют возможность поворачиваться вокруг вертикальных шарниров 29' втулки несущего винта.
У данного несущего винта имеется электромеханическая система ограничения угла взмаха лопастей при непреднамеренном увеличении угла атаки (при порыве ветра и т.д.) или очень энергичном изменении пилотом установочных углов лопастей. Данная система выполнена по аналогии системы, описанной в патенте RU №2668482 от 18.07.2017 г. и показана на фигурах 12, 13 и 14, из которых видно, что при работе несущего винта и отклонении лопасти 16 выше (или ниже) более допустимых углов, срабатывают контактные датчики 53, с которых подается сигнал на смеситель электрических сигналов 33, в котором заложена программа на соответствующее отклонение (на данной лопасти) серворуля 19 с управляемым триммером 31 на величину соответствующую отклонению лопасти 16.
Данная лопасть не имеет собственной жесткости на кручение вокруг продольной оси, поэтому пилот может в полете изменять крутку лопастей, подбирая лучшую для заданного режима полета, чем осуществляет также увеличение КПД винта. Данная система состоит из задатчика-пилота или системы автоматического управления, которые подают дополнительный электрический сигнал через электрожгут 43 внутри лопасти на сумматор 33, который дополнительно отклоняет серворуль 19 с управляемым триммером 31 на определенный угол, накладывая это отклонение на величину отклонений от сигналов от катушки индуктивности 29''. Крутка лопастей выполняется синхронно на всех лопастях.
В предложенной конструкции центробежный груз 17, прикрепленный на конце лопасти 16, выполняет одновременно и роль воздушного гребня, препятствующего перетеканию обтекающего воздушного потока с нижней части конца лопасти с повышенным давлением к верхней с пониженным, предотвращая образование концевого вихря, что является основной частью индуктивного сопротивления лопасти, значит повышается подъемная сила лопасти, тяга и КПД винта.
Также уменьшение вихреобразования на конце лопасти, а значит уменьшение индуктивного сопротивления происходит за счет стабилизатора 18 стреловидной формы, прикрепленного к центробежному грузу 17, одновременно он улучшает и убыстряют переход несущего винта с эластичными лопастями на режиме авторотации при отказе двигателей, что улучшает безопасность полета, одновременно уменьшает вибрации при работе несущего винта в полете.
У обычных вертолетных винтов на режимах ближе к максимальной тяге, концы лопастей загибаются вверх из-за расположения максимальной подъемной силы лопасти ближе к концу лопасти в районе 75% радиуса винта, а значит происходит уменьшение угла атаки и подъемной силы лопасти, соответственно и тяги винта. В предложенной конструкции центробежная сила от масс центробежного груза, стабилизатора и серворуля приложена непосредственно к концу лопасти и вытягивает ее в плоскость вращения, не допуская тем самым уменьшения углов атаки конца лопасти, что также дает увеличение тяги и КПД винта. Одновременно в полете значительно уменьшаются вибрации всего несущего винта. Также за счет того, что к концу каждой лопасти приложена дополнительная центробежная сила, значительно уменьшается угол конусности всего винта, что значительно увеличивает вертикальную составляющую общей подъемной силы каждой лопасти, а значит увеличивается тяга и КПД всего винта, особенно на режимах максимальной тяги несущего винта.
Перечисленные конструктивные преобразования несущего винта предложенного ГСВВП дают ему значительное увеличение тяги и КПД винта по сравнению с подобным несущим винтом и тяговооруженностью вертолета одновинтовой схемы, при этом, при убранном несущем винте такой ГСВВП может летать, как обычный самолет с любой расчетной скоростью.
Предложенный ГСВВП может быть изготовлен полностью из российских материалов.
Показанный на фиг. 15 график распределения подъемной силы по длине сворачивающейся лопасти при постоянном установочном угле по всей длине лопасти, представляющий собой интеграл площади под кривой АЕВС являющейся параболой и ординатами NA и КДС и отрезком NK оси абсцисс, являющимся длиной самой лопасти от выхода ее из барабана втулки несущего винта (точка 2) до крепления центробежного груза на конце лопасти (точка 21). Численная величина данной площади равна величине подъемной силе развиваемой сворачивающейся лопастью при режимах близких к максимальным величинам работы несущего винта.
Интеграл площади ограниченной кривой АЕВК, ординатой NA и отрезком NK оси абсцесс является численно равным величине подъемной силы жесткой лопасти таких же размеров и качества, что и сворачивающаяся лопасть несущего винта. Площадь ВСДК является разницей величины подъемной силы сворачивающейся и жесткой лопасти, причем, площадь ВДК представляет потерю подъемной силы жесткой лопасти на конце лопасти из-за перетекания воздушного потока с нижней стороны более высокого давления в сторону верхней стороны с более низким давлением и образованием воздушных вихрей, что является основой индуктивного сопротивления лопасти, а площадь ВСД является потерей подъемной силы из-за увеличения угла конусности лопасти несущего винта на режиме максимальной тяги несущего винта и изгибе конца лопасти вверх на режиме максимальной тяги несущего винта.
Точка Е на кривой ABC соответствует средней части сворачивающейся лопасти. Из графика видно, что величина подъемной силы в точке Е в 3,5 раза меньше величины подъемной силы в конце лопасти в точке С, что опровергает мнение, что в средней части лопасти возможен изгиб ее от подъемной силы в сторону уменьшения угла атаки, также возможность изгиба препятствует аэродинамическая жесткость от натяжении лопасти, передних и задних кромок от центробежных сил от масс самой лопасти и от масс центробежного груза совместно со стабилизатором и серворулем, а также расположение продольной линии фокусов элементов профилей лопасти и совмещение ее с линией центров тяжести элементов лопасти или расположение ее на незначительном расстоянии сзади линии центров тяжести и совмещение линии центров тяжести с продольной осью вращения лопасти, т.е. моменты М - моменты вокруг продольной оси вращения от аэродинамических сил минимальны или ничтожно малы, что достигается при изготовлении подбором, величиной и углом среза конусности хвостовиков профилей сворачивающейся лопасти, парирующих пикирующие моменты профилей лопастей согласно патента RU №2594321 от 20.05.2015 г. с учетом аэродинамических продувок отрезков (секций) лопасти в аэродинамической скоростной трубе.
Предложенный по настоящему изобретению гидросамолет вертикального взлета и посадки (ГСВВП) работает следующем образом.
Перед началом работы для взлета пилот включает электропитание ГСВВП от бортовых (аккумуляторов) или наземных источников электропитания. После этого производится запуск маршевого двигателя 11 и электропитание всего ГСВВП переводится от источников питания от запущенного маршевого двигателя. Предложенный ГСВВП может взлетать:
1) По вертолетному, как обычный вертолет одновинтовой схемы, как с земной поверхности так и с водной поверхности;
2) По автожирному методу, как с земной поверхности так и с водной поверхности;
3) По самолетному методу, как обычный самолет с земной поверхности и как обычный гидросамолет с водной поверхности.
Для взлета ГСВВП по вертолетному методу включаются механизмы «открытия-закрытия» капотов 21 несущего винта в положение «открыто». Убедившись, что все капоты несущего винта открылись и закрепились в открытом положении 22, подается электропитание на механизм поворота поворотной части 3 крыла, поворачивая ее вниз на 90, занимая положение 3'' для уменьшения потерь от воздушного потока несущего винта. Далее включается механизм 44 установки в рабочее (горизонтальное) положение стабилизаторов 18 и двигатели 30 управления и работы серворулями 19 устанавливают их в рабочее (горизонтальное) положение. Дальше запускаются подъемно-маршевые двигатели 15 и включается привод 13''' вращения вала редуктора 13' с втулкой 13'' и барабанами 14 несущего винта. Пилот устанавливает заданный режим работы подъемным двигателям 15 и включает систему «выпуска-уборки» лопастей 16 в положение «выпуск». Конструкция редуктора 13' несущего винта и системы синхронного, плавного и управляемого «выпуска-уборки» лопастей 16 в предложенном ГСВВП выполнены по аналогии описанной в патентах RU 2668482 от 18.06.2017 г. и RU 2727787 от 29.08.2019 г.
Для предотвращения разворота от крутящего момента несущего винта при его работе, на предложенном ГСВВП вместо хвостового винта имеются у маршевого двигателя 11 управляемые воздушные створки в районе выхлопного сопла, которые связаны с ножным управлением пилота (управлением по курсу). Одновременно при взлете, работе на режиме висения при максимальном крутящем моменте на несущем винте, пилот может регулировать боковую тягу воздушного потока от маршевого двигателя через управляемые створки также путем соразмерного увеличения мощности маршевого двигателя.
При вертикальном взлете с земной поверхности пилот увеличивает мощность подъемных двигателей 15 силовой установки несущего винта, маршевый двигатель 11 работает на пониженном режиме, пилот производит плавный вертикальный отрыв ГСВВП от земной поверхности, аналогично вертикальному взлету на вертолете одновинтовой схемы с остановкой для кратковременного зависания на высоте 10-15 м в зоне влияния воздушной подушки для оценки работы двигателей, систем управления, показаний контролирующих приборов и оборудования, затем пилот отклонением ручки управления вертолетом (рычаг управления «циклическим шагом» несущего винта) вперед и одновременным плавным увеличением рычагом «шаг-газ» мощности подъемных двигателей 15 и выдерживанием направления по курсу педалями ножного управления (отклонением газового потока от маршевого двигателя) производит разгон и увеличения скорости горизонтального потока с одновременным плавным увеличением высоты. При достижении скорости горизонтального полета 50-60 км/час, как и у обычных вертолетов одновинтовой схемы, происходит перестраивание направления обтекания лопастей несущего винта воздушным потоком с вертикального на косое с незначительным и быстропроходящим колебанием несущего винта и нагрузки на управление несущим винтом, с дальнейшим успокоением и увеличением тяги несущего винта от увеличения скорости обтекания лопастей воздушным потоком и дальнейшим увеличением скорости полета, т.е. взлет, разгон скорости полета и переход в набор высоты аналогичен и практически не отличается по сложности от управления и поведения обычного вертолета одновинтовой схемы. С увеличением скорости горизонтального полета поворотная часть 3 крыла, пилотом с помощью ручного управления или системой автоматического управления от датчиков давления от набегающего воздушного потока, разворачивается и устанавливается в положение 3', т.е. с углом 10-20. Одновременно отклоняются вперед управляемые предкрылки 4 и крыло приобретает выпукло-вогнутый поперечный профиль, что соответствует значительному увеличению подъемной силы крыла, а значит дает способность летательному аппарату производить полет на пониженной скорости. За счет увеличения мощности маршевого двигателя устанавливается скорость полета, когда крыло полностью воспринимает нагрузку (вес) от ГСВВП и тяга несущего винта становится ненужной. Лопасти несущего винта устанавливаются с нулевым установочным углом, уменьшаются обороты несущего винта до расчетных и включается система «выпуска-уборки» лопастей в режим «уборка» и лопасти 16 синхронно и плавно полностью убираются-сворачиваются на барабаны 14, складываются стабилизаторы 18 и серворули 19, выключаются подъемные двигатели 15 силовой установки несущего винта и закрываются капоты 21. Далее увеличивается мощность маршевого двигателя 11, возрастает скорость горизонтального полета, одновременно убираются предкрылки 4 и закрылки 6 и 6' устанавливаются в полетное положение, поворотная часть 3 крыла устанавливается с нулевым установочным углом, хвостовое оперение - кили 9, рули направления 10 и элероны 5 становятся эффективными, убираются шасси 23 и ГСВВП превращается в обычный самолет, способный летать на любой расчетной скорости. При посадке предложенного ГСВВП действия производятся в обратном порядке.
При вертикальном взлете ГСВВП с водной поверхности действия пилота и проверка режима работы оборудования производятся в таком же порядке, что и взлете с земной поверхности, кроме того, что необходимо учитывать, что высота волны более 1,5 м чрезмерно увеличивает ударную нагрузку на поворотную часть 3 крыла, повернутую при взлете вертикально на 90, и при взлете с морской поверхности необходимо учитывать, что длина волны (расстояние между максимальными точками высоты соседних волн) морской волны более длинная, чем у речной волны, поэтому желательно увеличивать мощность подъемных двигателей и производить отрыв от водной поверхности в момент, когда ГСВВП находится в верхней точке (на гребне) волны. Такой метод значительно облегчает отрыв и плавный отход от водной поверхности. Подобный метод практикуют гидровертолеты при взлете с морской поверхности.
Необходимо также учитывать, что диаметр несущего винта у ГСВВП значительно увеличен, на концах лопастей прикреплены центробежные грузы, создающие значительную центробежную силу на каждой лопасти в плоскости вращения винта, а значит при энергичных колебаниях несущего винта вокруг поперечной или продольной оси ГСВВП возникают энерционные силы, стремящиеся препятствовать изменению пространственного положения, а при изменении его, возникают силы Кариолиса, стремящиеся изменить дополнительно пространственное положение винта и самого ГСВВП, но с учетом действия этих сил по закону Кариолиса. И хотя стабилизаторы, серворули и управляемые триммеры, прикрепленные на конце каждой лопасти находятся в зоне максимальной воздушной скорости и обладают максимальной эффективностью, все же пилоту при вертикальном взлете ГСВВП с водной поверхности при максимально допустимой высоте волны, необходимо действовать более плавно и в то же время быстро и энергично в момент отрыва от водной поверхности. Что при достаточной тренированности не составляет особой сложности.
При взлете предложенного ГСВВП по автожирному методу он производит вертикальный взлет и режим висения на низкой высоте в зоне влияния воздушной подушки как обычный вертолет одновинтовой схемы с земной поверхности или гидровертолет одновинтовой схемы с водной поверхности. При этом, поворотная часть 3 крыла повернута вниз на 90,
а крутящий момент от несущего винта парируется газовыми струями, выходящими из управляемых воздушных створок маршевого двигателя 11, т.е. ножным управлением. Несущий винт вращается в горизонтальной плоскости и вертикальная составляющая тяги винта направлена вертикально вверх, т.е. она максимальная, равна тяги винта и уравнивает взлетный вес ГСВВП. Для начала движения вперед пилот увеличивает мощность и горизонтальную тягу маршевого двигателя 11 не изменяя положения несущего винта, сразу сначала движения ГСВВП в горизонтальном направлении, за счет набегающего дополнительного горизонтального потока воздуха на несущий винт у него начинается прирост тяги и ГСВВП начинает одновременно с движением вперед, энергично подниматься вверх. В зависимости от поставленной задачи, пилот продолжает энергичный набор высоты с более умеренным приростом горизонтальной скорости полета или производит ручным управлением с помощью автомата перекоса 13, наклон конуса вращения винта вперед и за счет появления составляющей тяги винта вперед производит более ускоренный разгон сначала горизонтальной скорости, а затем уже переходит в более энергичный набор высоты. При этом, с началом движения ГСВВП в горизонтальном направлении, поворотная часть 3 крыла пилотом или системой автоматического управления устанавливается из вертикального положения 3'' в положение 3' и одновременно отклоняются вперед управляемые предкрылки 4. Дальнейшие действия производятся как и при взлете ГСВВП по вертолетному методу. Хотя указанный метод взлета ГС ВВП с ограниченной площадки или водной поверхности имеет разницу во взлете «чистого» автожира, все же имеет много общего и желательно называть такой метод «автожирным», т.к. на автожире при возможности предварительной раскрутки несущего винта и за счет этого вертикального отрыва от земли или водной поверхности и, вслед за этим, разгон горизонтальной скорости за счет тяги маршевого двигателя - имеет много общего. При таком методе взлета у ГСВВП возникает возможность поднять больше взлетный вес, чем при взлете по вертолетному, потому, что при начале увеличения горизонтальной скорости, в данном случае, отсутствует необходимость отклонять конус несущего винта вперед для получения составляющей горизонтальной тяги, вследствие этого не происходит уменьшения составляющей вертикальной тяги винта, которая уравновешивает взлетный вес ГСВВП и не происходит возможного уменьшения высоты полета и возможного касания о землю или водную поверхность при взлете с водной поверхности даже при максимальном взлетном весе без запаса мощности подъемных двигателей.
При взлете предложенного ГСВВП по самолетному с земной поверхности, капоты несущего винта не открываются, подъемные двигатели не запускаются и, соответственно, не выпускаются лопасти несущего винта, а разгон по взлетной полосе производится за счет тяги маршевого двигателя 11, как на обычном самолете. При применении механизации крыла для уменьшения пробега при разгоне и уменьшении взлетной дистанции, перед взлетом отклоняются вперед управляемые предкрылки, а закрылки отклоняются вниз и устанавливаются во взлетное положение 3' с углом 10-20. После разгона, отрыва от земной поверхности и установления расчетной скорости полета, механизация крыла устанавливается в полетное положение, убираются шасси и данный ГСВВП продолжает полет как обычный самолет.
При взлете ГСВВП по самолетному с водной поверхности необходимо учитывать высоту волны и взлетный вес. Высота волны для взлета ГСВВП ограничивается высотой 1, 2 м и аналогична ограничениям для взлета обычных гидросамолетов такого же взлетного веса. При этом, водяные брызги от носовой части при разбеге отсекаются передней силовой неподвижной частью 2 крыла 3 с обоих сторон фюзеляжа. Подъемные двигатели 15 прикрепленные за задней кромкой крыла 3 и дополнительно прикрываются от водяных брызг капотами, закрывающими несущий винт и также при взлете подъемные двигатели прикрываются управляемыми закрылками 6', прикрепленными отдельно от основных к центроплану с обоих сторон фюзеляжа и устанавливаемыми при взлете в положение 3', т.е. с углом 10-20. Входное сопло 12 маршевого двигателя 11 защищено от брызг своим расположением сверху фюзеляжа и прикрытием капотами несущего винта. Редан, расположенный в нижней части фюзеляжа с кильватостью, при достижении расчетной скорости движения ГСВВП, облегчает отрыв фюзеляжа от водной поверхности. После отрыва происходит плавный набор высоты с увеличением скорости горизонтального полета. Затем убираются предкрылки и закрылки устанавливаются в полетное положение и ГСВВП продолжает полет как обычный самолет.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2017 |
|
RU2668482C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ НЕСУЩЕЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2594321C1 |
| САМОЛЕТ ПАВЛОВЫХ | 2000 |
|
RU2192986C2 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| АЭРОМОБИЛЬ | 2007 |
|
RU2362709C2 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |




Изобретение относится к авиационной технике, в частности к конструкциям гидросамолетов. Гидросамолет вертикального взлета и посадки (ГСВВП) содержит фюзеляж с кабиной пилотов, двигатели для вертикального взлета и посадки, имеющие соединения с редуктором несущего винта, крыло с элеронами и механизацией для взлета и посадки, хвостовое оперение в виде стабилизатора с рулем высоты и килей с рулями направления, шасси для передвижения по земной поверхности. Нижняя часть фюзеляжа выполнена с кильватостью и реданом, обеспечивающими быстрое перемещение по водной поверхности. Крутящий момент от несущего винта при его работе парируется потоком газовых струй, отклоняемым управляемыми створками маршевого двигателя, прикрепленного в задней части фюзеляжа. Крыло самолета выполнено с отклоняемой частью вниз от 0 до 90° для уменьшения сопротивления и потерь тяги винта при вертикальном взлете и посадке и на режиме висения. Профиль лопастей несущего винта выполнен выпукло-вогнутым с одинаковой кривизной верхней и нижней поверхностей, что позволяет сворачивать лопасти на барабаны. Управление несущим винтом осуществляется с помощью автомата перекоса и системы управления серворулями. Обеспечивается вертикальный взлет и посадка, возможность выполнения работ в режиме висения, горизонтальный полет в самолетном режиме с убранными лопастями. 2 з.п. ф-лы, 15 ил.
1. Гидросамолет вертикального взлета и посадки, содержащий фюзеляж с кабиной пилотов, двигатели для вертикального взлета и посадки, имеющие соединения с редуктором несущего винта, крыло с элеронами и механизацией для взлета и посадки, хвостовое оперение в виде стабилизатора с рулем высоты и килей с рулями направления, шасси для передвижения по земной поверхности, несущий винт, при этом нижняя часть фюзеляжа выполнена с кильватостью и реданом, крутящий момент от несущего винта при его работе парируется потоком газовых струй, отклоняемым управляемыми створками маршевого двигателя, прикрепленного в задней части фюзеляжа, и крыло самолета выполнено с отклоняемой частью вниз от 0 до 90° для уменьшения сопротивления и потерь тяги винта при вертикальном взлете и посадке и на режиме висения от воздушного потока несущего винта, отличающийся тем, что гидросамолет имеет несущий винт со сворачивающимися убираемыми лопастями, имеющими увеличенную длину - более 18 метров, на конце лопасти несущего винта к задней ее кромке прикреплен управляемый вспомогательный серворуль, соединенный гибким валиком с электродвигателем реверсивного типа, прикрепленным к задней части центробежного груза, при этом вспомогательный серворуль изготовлен из гибкого материала и работа электродвигателя управления вспомогательным серворулем и его отклонением при работе несущего винта происходит синхронно с работой электродвигателя управления серворулем и его отклонением.
2. Гидросамолет вертикального взлета и посадки по п. 1, отличающийся тем, что управление таким гидросамолетом по тангажу, крену и высоте при полете в вертолетном режиме при вертикальном взлете и посадке, режимах висения, перемещениях вдоль земной и водной поверхностей на малой скорости, на переходных режимах от вертолетного к самолетному и обратно осуществляется с помощью автомата перекоса, отклоняемых серворулей и вспомогательных серворулей, прикрепленных на концах лопастей, и систем их управления, а по направлению - с помощью отклонения потока газовых струй управляемыми створками маршевого двигателя, а после взлета и увеличения скорости горизонтального полета, уборки лопастей и закрытия несущего винта обтекаемыми капотами данный гидросамолет вертикального взлета и посадки превращается в обычный самолет и управление им осуществляется с помощью самолетных рулей управления и их систем, а на переходных режимах от вертолетного к самолетному и обратно вертолетные и самолетные системы управления работают совместно.
3. Гидросамолет вертикального взлета и посадки по п. 1 или 2, отличающийся тем, что подъемные двигатели при полете в вертолетном режиме передают крутящий момент через редуктор несущего винта на вращение несущего винта, а когда гидросамолет набирает необходимую скорость горизонтального полета и крыло обеспечивает подъемную силу, равную или более взлетного веса данного гидросамолета, несущий винт становится ненужным для полета в горизонтальном полете, лопасти винта, имеющие выпукло-вогнутый поперечный профиль с хвостовиком, сворачиваются, наматываясь плавно и синхронно без сдвигов и перекосов на барабаны несущего винта с помощью системы уборки и выпуска лопастей, складываются стабилизаторы и серворули, превращая несущий винт в компактную конструкцию, а после остановки вращения несущего винта он закрывается обтекаемыми капотами, при этом подъемные двигатели выключаются, а маршевый двигатель увеличивает обороты и мощность и гидросамолет увеличивает скорость горизонтального полета, превращаясь в обычный самолет, а при переходе от самолетного режима полета к вертолетному действия и порядок работы происходят в обратном порядке.
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| ДВУХМОТОРНЫЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ НАЗЕМНОГО И ВОДНОГО БАЗИРОВАНИЯ С УКОРОЧЕННЫМ И ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ "ЛАДОГА-9 УВ" | 2001 |
|
RU2196707C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| RU 94036149 A1, 10.07.1996 | |||
| US 3637168 A1, 25.01.1972 | |||
| US 20160107745 A1, 21.04.2016. | |||

