Изобретение относится к авиационной технике в частности к самолетостроению и вертолетостроению и может быть использовано при создании самолетов вертикального взлета и посадки (СВВП), способных летать как на дозвуковых скоростях, так и на сверхзвуковых, способных также работать на режиме висения, осуществлять спасательные и монтажные работы, а также такие самолеты могут быть использованы для доставки пассажиров и грузов в труднодоступные районы, в том числе в северных районах.
Известны различные СВВП с использованием газовой струи от реактивных двигателей, направленной вниз. Но такие летательные аппараты имеют существенные недостатки из-за чего не нашли широкого применения в настоящее время:
а) большой расход топлива на режиме взлета и посадки;
б) по физическим законам при вертикальном взлете на газовой струе возможен подъем полезной нагрузки всего 7-8% от взлетного веса летательного аппарата, это ограничивает и запас топлива, что существенно ограничивает время и дальность полета такого аппарата.
Для сравнения у современных вертолетов полезная нагрузка составляет 53-50% от взлетного веса вертолета за счет того, что несущий винт является наилучшим преобразователем энергии при малых скоростях полета;
в) при взлете и посадке вертикальная горячая газовая струя от реактивных двигателей разбивает земную поверхность, тем более снег, песок и даже разрушает бетонное покрытие, образуя сильный пыльный вихрь вокруг самолета и вся эта пыль тут же засасывается в двигатели, которые очень быстро выходят из строя. Поэтому взлет и посадки СВВП на газовых струях производятся, как правило с металлических поверхностей или кораблей;
г) из-за сильной газовой струи направленной вниз невозможно выполнять на режиме висения спасательные и монтажные работы, а так же из-за сложности управления таким аппаратом при продолжительном режиме висения, особенно при незначительном боковом ветре.
Поэтому такие аппараты в настоящее время не нашли широкого применения.
Известен патент RU №2385267 С1, МПК В64С 27/24 - 24.12.2008, где описан способ преобразования дискового крыла СВВП, заключающийся в выдвижении инерционными силами через фильеры на периметре вращающегося дискового крыла жестких лопастей, прикрепленных тросами к барабану, расположенному на оси крыла и в уборке их в полость диска при торможении барабана и наворачивании на него тросов вращающимся дисковым крылом, а в завершающей стадии выдвижения из крыла своей комлевой частью лопасти жестко фиксируются с торсионами, соединяющими втулку несущего винта с фильерами, закрепленными в крыле на сферических эластомерных подшипниках, создающих горизонтальные и вертикальные шарниры лопастей с возможностью управления их углами атаки и ограничением взмаха, а в горизонтальном полете, когда лопасти убраны и вращение диска остановлено, из него выдвигаются консоли крыла.
Далее при необходимости полета при несущем винте с большими перегрузками, положение втулки винта по высоте выполняется регулируемыми, консолями винта крыла могут служить лопасти, имеющие изгибную жесткость и чечевидный профиль с одинаковыми характеристиками обтекания в носовой и хвостовой части.
Недостатками конструкции, предложенной по данному проекту, являются следующее:
а) дисковое крыло с выпускаемыми по периметру лопастями, с расположенной в нем механизацией управления лопастями с системой уборки и выпуска лопастей, с усилением корпуса от нагрузок лопастей и выдвигающихся консолей крыльев имеет больший вес, чем аналогичное по площади обычное самолетное крыло;
б) дисковое крыло имеет меньший КПД на крейсерских и меньших скоростях полета, чем аналогичное по площади самолетное крыло;
в) вертолетная лопасть не может быть консолью крыла, т.к. не обладает жесткостью на изгиб в вертикальной плоскости. Жесткость на изгиб она приобретает при работе винта (вращении) с определенной частотой вращения и окружной скоростью за счет растяжения в продольном направлении центробежной силой действующей от ее же массы. А чтобы вертолетная лопасть могла стать консолью самолетного крыла, она должна иметь жесткость и прочность на изгиб, а значит и размер и вес, как самолетное крыло, что не подходит для вертолетной лопасти;
г) система выдвижения консолей крыла по бокам дискового крыла дает некоторое увеличение подъемной силы крылу, а также дает возможность управления дисковым крылом и самим летательным аппаратом по крену и тангажу, но вместе с этим значительно усложняется сама конструкция дискового крыла, увеличивается ее размер и увеличивается вес самого диска;
д) система выпуска лопастей с помощью центробежной силы и тормозных колодок и уборка с помощью притормаживания барабанов во время вращения диска крыла, не обеспечивает плавность выпуска лопастей из-за того, что при выпуске лопастей центробежная сила от массы самой лопасти с увеличением радиуса винта возрастает в квадратичной зависимости, поэтому даже при постоянных оборотах винта с помощью только тормозных колодок очень сложно добиться равномерного выпуска. Под конец выпуска возможен срыв с тормоза и быстрый выпуск лопастей с ударом на ограничивающие их фильеры, что не отвечает безопасности всей конструкции винта. А уборка лопастей с помощью притормаживания барабана, также не отвечает безопасности из-за того, что в последний момент возможен удар лопасти о барабан или наоборот при быстрой остановке дискового крыла возможна не полная уборка лопастей. Установка же дополнительной регулирующей и контролирующей системы, обеспечивающей плавность и безопасность выпуска и уборки лопастей, значительно усложняет конструкцию и вес дискового крыла;
е) управление выдвинутыми лопастями по крену и тангажу при вращающемся дисковым крыле представляется большой сложностью в связи с большим расстоянием фильер от вала винта, вследствие чего обычный вертолетный автомат перекоса будет неприемлем;
ж) перемещение втулки винта по высоте вала винта с целью уменьшения нагрузки на корпус диска винта от вертикальной составляющей центробежной силы лопасти путем уменьшения излома действующей центробежной силы в фильере, требует дополнительной механизации, а значит значительного усложнения и увеличения общего веса диска винта. Причем при перемещении втулки нарушаются связи систем управления винтом, что также значительно усложняет конструкцию винта.
Наиболее удачной схемой самолета вертикального взлета и посадки из всех известных в настоящее время, является схема с прикрепленными на концах крыла несущими винтами, которые с увеличением скорости полета вместе с крылом разворачиваются из вертикального положения в горизонтальное и винты превращаются в тянущие. Эта схема является более совершенная из известных и ее представляет СВВП V-22 "Osprey" ("Оспрей") США (Кузнецов К.Д. "Конвертоплан Белл-Боинг Оспрей", "Крылья Родины", Москва, 2017 г. №3-4). Скорость горизонтального полета в самолетном режиме достигает 500 км/час, скорость в вертолетном режиме достигает 180 км/час.
Но основным недостатком "Оспрей", по заявлению эксплуатирующих организаций является то, что он не очень надежен с его сложными переходными режимами. А единственно надежным летательным аппаратом остается обычный вертолет, что подтверждается многочисленными авариями и катастрофами летательных аппаратов "Оспрей" (Зарубежная экспресс-информация по авиационной технике, 2019 г., интернет).
Но из-за отсутствия более совершенных подобных летательных аппаратов, указанные аппараты продолжаются строиться и эксплуатироваться, в основном для армии.
Следующим недостатком указанного летательного аппарата является то, что воздушные винты больше самолетных, но меньше вертолетных. Чтобы иметь наибольший взлетный вес, необходимо винты большого диаметра, но с большим винтом невозможно получить большую горизонтальную скорость. Поэтому приходится выбирать винты средних размеров. Что дает определенное увеличение горизонтальной скорости, но из-за того, что винты меньше вертолетных, то вертикальный воздушный поток от данных винтов будет значительно сильнее, чем от аналогичного по взлетному весу вертолета, что делает практически невозможным использование указанных аппаратов при спасательных и монтажных работах на режиме висения. Одновременно таким аппаратом сложно управлять на режиме висения, т.к. незначительная разница в обтекании воздухом винтов при боковом ветре, дает значительную разницу тяговых характеристик винтов и нарушает устойчивость и балансировку.
Имеется вертолет одновинтовой схемы "МД - 969" США (Интернет - Википедия), в котором вместо хвостового винта реактивный момент от несущего винта, а так же развороты вертолета по направлению осуществляются благодаря вентилятору, закрепленному в хвостовой балке, имеющему привод от силовой установки летательного аппарата, и создающий повышенное давление в хвостовой балке и регулируемых щелевых отверстий на конце балки для выхода воздушной струи.
Отсутствие хвостового винта улучшает безопасность полета вертолета при взлете и посадке с ограниченных площадок с возможным соприкосновением хвостовой частью с препятствиями и при полете на предельно низких высотах, а также частично уменьшает общие вибрации вертолета, уменьшает воздушное сопротивление вертолета в горизонтальном полете и исключает возможность попадания вертолета в режим неуправляемого разворота от попадания хвостового винта в режим "вихревого кольца".
Создание напора воздушной струи от вентилятора осуществляется за счет отбора мощности от подъемных двигателей, что уменьшает их мощность, но учитывая, что на данном вертолете отсутствует хвостовой винт с отбором мощности через трансмиссию от подъемных двигателей, на легких вертолетах данные отборы примерно равны. Но на средних и тяжелых вертолетах такое равенство нарушается в пользу открытого хвостового винта. Поэтому выбор конструкции зависит от поставленных и решаемых задач летательным аппаратом.
Имеется патент "Аэродинамический профиль несущей поверхности летательного аппарата" (Патент RU №2594321 С1, МПК В64С 3/14, В64С 27/32 - 20.05.2015), который позволяет эластичной сворачивающейся лопасти несущего винта сворачиваться (наматываться) на барабан без перекосов и поломок кромок лопасти, превращаясь в компактную конструкцию и одновременно увеличивая подъемную силу лопасти и тягу несущего винта. Данный профиль позволяет иметь длинную лопасть, более всех ограничений.
Имеется патент "Несущий винт летательного аппарата со сворачивающимися убираемыми лопастями" (Патент RU №2668482 С1, МПК В64С 27/30, В64С 11/06, В64С 27/32 - 18.07.2017).
Данный несущий винт содержит вал главного редуктора, к верхнему концу которого прикреплена горизонтально расположенная втулка несущего винта с приливами по количеству лопастей. В каждом приливе установлен вертикальный шарнир, к которому прикреплен осевой шарнир, к которому, в свою очередь, прикреплен барабан с расположенной внутри катушкой, к которой прикреплена комлевой частью эластичная лопасть. Лопасти несущего винта имеют выпукло-вогнутый профиль, позволяющий компактно без перекосов и поломок кромок лопастей синхронно сворачиваться-наматываться на катушки барабанов и разворачиваться с них с помощью системы регулируемой уборки и выпуска лопастей. К другому концу каждой лопасти прикреплен центробежный груз со стабилизатором с управляемым серворулем. Данная конструкция обеспечивает синхронную регулируемую уборку и выпуск лопастей в полете и на земле, уменьшает габариты несущего винта с убранными лопастями, улучшает его работоспособность и управляемость и увеличивает КПД винта.
Задачей предлагаемого изобретения является создание скоростного самолета вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями, способного взлетать и производить посадку с любой неподготовленной площадки, быть простым в управлении на уровне обычного вертолета одновинтовой схемы, на режиме висения производить монтажные и спасательные работы и, как самолет, летать быстро и далеко, в том числе и на сверхзвуковой скорости.
Известный самолет вертикального взлета и посадки с прикрепленными на концах крыла несущими винтами, которые с увеличением скорости полета вместе с крылом разворачиваются из вертикального положения в горизонтальное и винты превращаются в тянущие. V-22 "Osprey" ("Оспрей") США, являющийся ближайшим аналогом к заявленному "Самолету вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями" взят за прототип, а также "Аэродинамический профиль несущей поверхности летательного аппарата" по патенту RU №2594321 взят за прототип. Также взят за прототип "Несущий винт летательного аппарата со сворачивающимися убираемыми лопастями" RU №2668482. Также за прототип взят вертолет "МД - 969" США у которого развороты по курсу и парирование реактивного момента от вращения несущего винта вместо хвостового винта осуществляется воздушной струей, из вытекающей из боковых поверхностей в конце хвостовой балки.
Технический результат, на решение которого направлено предложенное изобретение является разработка СВВП, способного как вертолет, за счет несущего винта взлетать и производить посадку на неподготовленную площадку, производить спасательные, монтажные и другие виды работ на режиме висения, а как самолет с убранными лопастями несущего винта после взлета, летать как обычный самолет быстро и далеко за счет маршевого двигателя, который также при взлете, посадке, на режиме висения и при разворотах осуществляет за счет разворота в сторону газовой струи от данного двигателя, роль хвостового винта, отсутствующего на данном летательном аппарате.
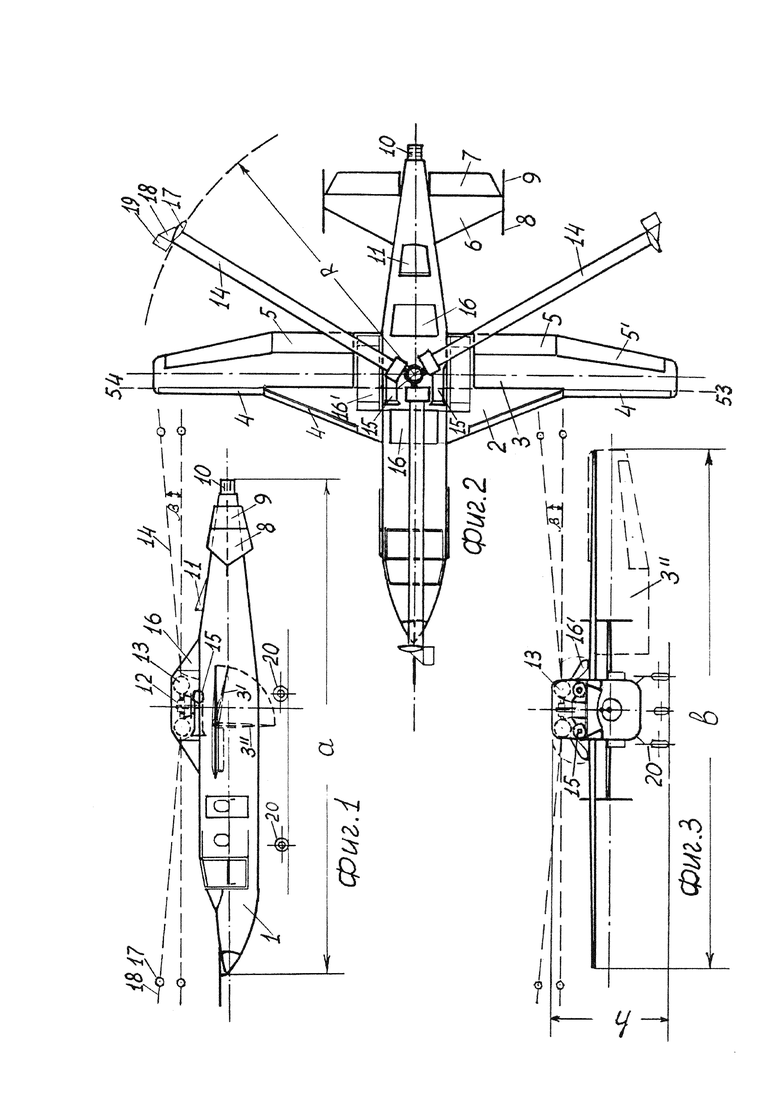
Сущность изобретения поясняется чертежами, на которых изображено следующее:
На фиг. 1 - представлен общий вид СВВП по изобретению, вид сбоку.
На фиг. 2 - представлен общий вид СВВП по изобретению с выпущенными лопастями несущего винта, вид сверху.
На фиг. 3 - представлен общий вид СВВП по изобретению с показом установки крыла самолета в вертикальное положение под 90 вниз, вид спереди.
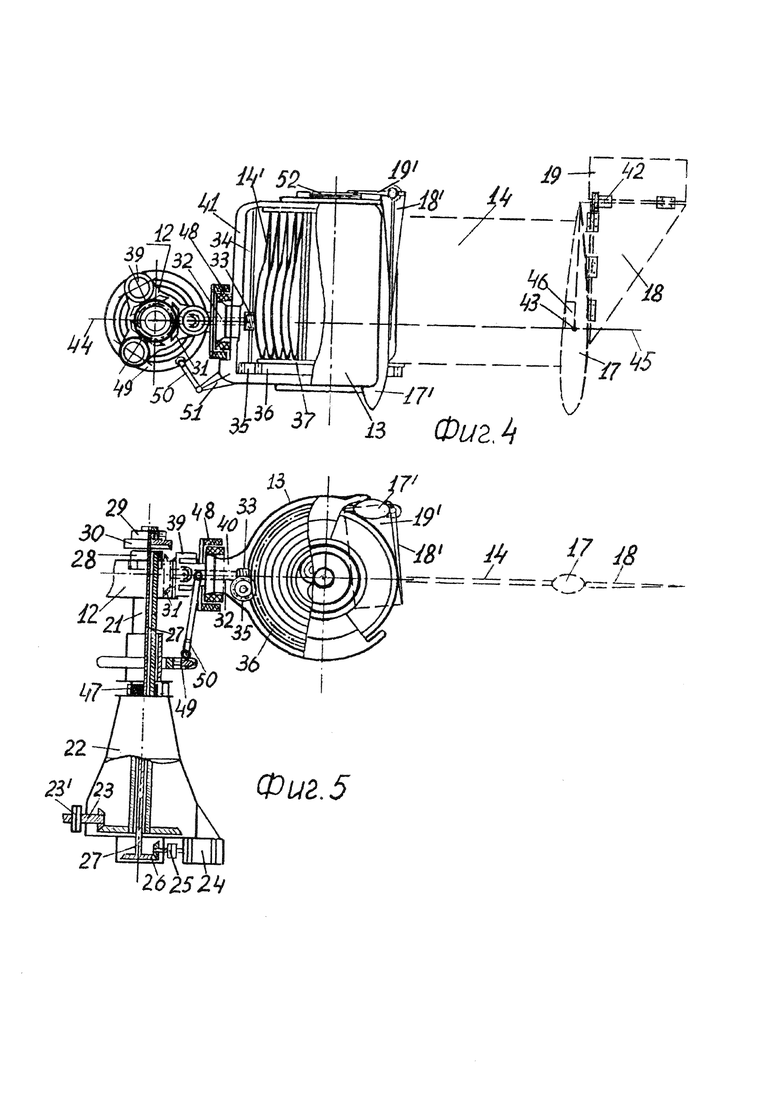
На фиг. 4 - показан несущий винт со сворачивающимися убираемыми лопастями, вид сверху.
На фиг. 5 - показан несущий винт со сворачивающимися убираемыми лопастями, вид сбоку.
Предложенный самолет вертикального и посадки содержит: 1 - фюзеляж с кабиной пилотов; 2 - передняя силовая часть крыла; 3 - поворотная часть крыла; 3' - положение поворотной части крыла при полете СВВП на переходном режиме на малой скорости; 3'' - повернутое положение вниз под 90 поворотной части крыла; 4 - отклоняемые предкрылки; 5 - отклоняемые закрылки; 5' - элероны; 6 - плоскости стабилизатора горизонтального оперения; 7 - плоскости руля высоты; 8 - плоскости килей вертикального оперения; 9 - плоскости рулей направления; 10 - реактивный маршевый двигатель с поворотными управляемыми поверхностями выхлопного сопла; 11 - воздухозаборник реактивного маршевого двигателя; 12 - втулка несущего винта; 13 - барабаны несущего винта; 14 - сворачивающиеся убираемые лопасти несущего винта в развернутом (рабочем положении); 14' - сворачивающаяся лопасть в свернутом (убранном) положении; 15 - реактивные двигатели силовой установки несущего винта; 16 - капоты, закрывающие несущий винт с убранными лопастями; 16' - капоты в открытом, сложенном положении; 17 - центробежный груз, прикрепленный на конце лопасти; 17' - центробежный груз со свернутой лопастью; 18 - стабилизатор, прикрепленный к центробежному грузу; 18' - стабилизатор в сложенном положении; 19 - серворуль, прикрепленный к стабилизатору; 19' - серворуль в сложенном положении; 20 - шасси СВВП; 21 - ведущий вал главного редуктора 22 несущего винта; 23 - привод от силовой установки летательного аппарата; 23' - обгонная муфта; 24 - двигатель реверсивного типа; 25 - нижняя муфта сцепления; 26 - нижний редуктор, соединенный с внутренним валом 27, к верхнему концу которого прикреплена электромагнитная муфта 28 выравнивания оборотов ведущего 21 и внутреннего 27 валов; 29 - устройство включения в работу раздаточной шестерни 30, входящей в зацепление с зубчатыми колесами 31 по количеству лопастей; 32 - карданный валик, прикрепленный одним концом к колесу 31, а другим к самотормозящейся червячной передаче 33, состоящей из червяка и червячной шестерни, закрепленной на промежуточном вале 34, к которому прикреплена мала ведущая шестерня 35, входящая в зацепление с большим зубчатым колесом 36, прикрепленным к катушке 37 барабана 13, который прикреплен к втулке 12 с помощью вертикального 39 и осевого 40 шарниров и вилки 41; 42 - электродвигатель реверсивного типа управления серворулем; 43 - общий центр тяжести центробежного груза, стабилизатора и серворуля; 44-45 - общая линия центров тяжести элементов лопасти и центробежного груза, продольная ось вращения лопасти и линия фокусов элементов лопасти; 46 - сумматор сигналов электрических токов системы управления серворулем; 47 - скользящие электроконтакты передачи электроэнергии от силовой установки СВВП к несущему винту; 48 - катушка индуктивности системы управления серворулем; 49 - автомат перекоса; 50 - тяга автомата перекоса; 51 - рычаг вилки 41 барабана 13; В - угол отклонения лопастей несущего винта в вертикальной плоскости при работе винта - угол конусности; 52 - скользящий электроконтакт на катушке барабана; 53-54 - ось поворота задней поворотной части крыла вниз от 0 до 90; h - высота СВВП.
Предложенный по настоящему изобретению самолет вертикального взлета и посадки (СВВП) работает следующим образом.
Перед началом работы для взлета "по вертолетному" пилот включает электропитание самолета от бортовых (аккумуляторов) или наземных источников электропитания. После этого включает механизм открытия капотов 16, закрывающих несущий винт с барабанами 13 с убранными лопастями 14'. Далее подается электропитание на механизм поворота поворотной части 3 крыла, поворачивая его вниз под 90, занимая положение 3''. Затем через скользящий электроконтакт 47 подключается система управления несущим винтом и включаются системы установки в рабочее (горизонтальное) положение стабилизаторов 18 (на чертеже механизмы не показаны) и подается электрический ток на двигатели 42 реверсивного типа, устанавливая серворули 19 в рабочее горизонтальное положение.
Далее запускается маршевый двигатель 10 и от его энергоустановки производится запуск двигателей 15 силовой установки несущего винта, которые через обгонные муфты 23' и приводы 23 приводят во вращение ведущий вал 21 главного редуктора 22. К верхней части ведущего вала прикреплена втулка 12 несущего винта с барабанами 13 и они начинают вращение. Устанавливаются расчетные обороты и пилот устанавливает "шаг-газом" нулевой установочный угол несущему винту, т.е. всем барабаном 13, после этого производится выпуск лопастей 14, для чего подается электрический ток на электромагнитную муфту 28 выравнивания оборотов ведущего 21 и внутреннего 27 валов и далее на устройство 29 включения в работу раздаточной шестерни 30, входящей в зацепление с зубчатыми колесами 31 по количеству лопастей. Каждое зубчатое колесо 31 в своей лопасти средней частью прикреплено к карданному валику 32, проходящему внутри вертикального 39 и осевого 40 шарниров и вторым концом валик прикреплен к червяку самотормозящейся передачи 33, состоящей из червяка и червячной шестерни, закрепленной на промежуточном валике 34, входящая в зацепление с большим зубчатым колесом 36, прикрепленным к катушке 37 барабана 13 и передающее вращение данной катушке со свернутой (намотанной) на нее эластичной лопастью 14' в сторону "на выпуск". Далее подается электрический ток на нижнюю муфту сцепления 25, соединяя ее и, вслед за этим, подается электрический ток на двигатель 24 реверсивного типа в направление вращения "на выпуск". И все лопасти 14 несущего винта начинают выпускаться (разворачиваться с барабанов 13) с определенной скоростью под действием центробежных сил, действующих на лопасти от масс центробежных грузов 17 совместно с массами стабилизаторов 18 и серворулей 19, а затем и от масс, выпущенных частей лопасти, при вращении несущего винта. С увеличением длины лопасти (радиуса винта) увеличивается общая центробежная сила, действующая на каждую лопасть. И эта сила стремится быстро развернуть лопасть с барабана, а самотормозящаяся червячная передача 33 препятствует самопроизвольному, нерегулируемому, ускоряющемуся выпуску лопасти 14, при этом, раздаточная шестерня 30 обеспечивает синхронность выпуска всех лопастей. Поэтому выпуск лопастей происходит плавно и синхронно. При необходимости, путем изменения подачи мощности электрического тока на двигатель 24, возможно изменять скорость выпуска лопастей или вообще приостанавливать выпуск в любой момент.
После полного выпуска лопастей, срабатывают микровыключатели (на чертеже не показаны) и система выпуска отключается, для чего: отключается подача электрического тока на двигатель 24; разъединяется нижняя муфта сцепления 25; прекращается вращения внутреннего вала 27; отключается электромуфта 28 выравнивания оборотов ведущего 21 и внутреннего 27 валов; далее, отключается устройство 29 включения в работу раздаточной шестерни 30 и она выходит из зацепления с зубчатыми колесами 31, давая им свободу поворота вместе с карданными валиками 32 и барабанами 13 вокруг осей осевых шарниров 40, т.е. создается возможность установка установочных углов барабанов с помощью автомата перекоса 49. При вращении несущего винта на конце лопасти 14 окружная скорость максимальная, поэтому стабилизатор 18 и серворуль 19, находясь в зоне максимальной скорости, обладают максимальной аэродинамической эффективностью.
При вращении несущего винта от действия центробежных сил от масс самой лопасти, центробежного груза совместно со стабилизатором и серворулем, каждая лопасть растягивается в продольном направлении, в том числе растягивая переднюю и заднюю кромке, создавая необходимую аэродинамическую жесткость лопасти.
Общая центробежная сила, действующая на лопасть в 8-14 раз больше максимальной подъемной силы создаваемой лопастью при работе винта. Поэтому при работе несущего винта на земле с максимальными оборотами, лопасти даже с нулевыми установочными углами, удерживаются центробежными силами в горизонтальном положении (в плоскости вращения винта).
В предложенной конструкции центробежный груз, прикрепленный на конце лопасти, выполняет одновременно и роль воздушного гребня, препятствующего перетеканию обтекающего воздушного потока конца лопасти с нижней части конца лопасти с повышенным давлением к верхней с пониженным, предотвращая образование концевого вихря, что является основной частью индуктивного сопротивления лопасти, значит повышается подъемная сила лопасти, тяга и КПД винта.
Также уменьшение вихреобразования на конце лопасти, а значит уменьшение индуктивного сопротивления происходит за счет стабилизатора стреловидной формы., прикрепленного к центробежному грузу, одновременно он улучшает и убыстряет переход несущего винта с эластичными лопастями на режим авторотации при отказе двигателей, что улучшает безопасность полета, одновременно уменьшает вибрации при работе несущего винта в полете.
У обычных вертолетных винтов на режимах ближе к максимальной тяге, концы лопастей загибаются вверх из-за расположения максимальной подъемной силы лопасти ближе к концу лопасти на расстоянии 70-75% радиуса винта, а значит происходит уменьшение угла атаки и подъемной силы лопасти, соответственно и тяги винта.
В предложенной конструкции центробежная сила от масс центробежного груза, стабилизатора и серворуля приложена непосредственно к концу лопасти и вытягивает его в плоскость вращения, не допуская тем самым уменьшения углов атаки конца лопасти, что также дает увеличение тяги и КПД винта. Одновременно в полете значительно уменьшаются вибрации всего несущего винта. За счет того, что к концу каждой лопасти приложена значительная центробежная сила, помимо центробежной силы от массы самой лопасти, расположенной ближе к средней части лопасти, значительно уменьшается угол конусности винта В, что значительно увеличивает вертикальную составляющую общей подъемной силы каждой лопасти, а значит увеличивается тяга и КПД всего винта, особенно на режимах максимальной тяги несущего винта.
В предложенной конструкции при синхронном отклонении комлевой части лопасти и концевой на заданные установочные углы, эластичная лопасть работает как жесткая лопасть, т.е. и средние части лопасти за счет аэродинамической жесткости отклоняются также на заданные установочные углы. При этом комлевая часть лопасти 14, закрепленная в катушке 37 барабана 13 отклоняется вместе с барабаном с помощью автомата перекоса 49, тяги 50, рычага 51 и вилки 41 за счет поворота барабана 13 вокруг оси осевого шарнира 40 на заданный установочный угол. Одновременно с поворотом барабана поворачивается внутренняя часть катушки индуктивности 48, прикрепленная к внешней части осевого шарнира 40 и соразмерно с поворотом внутренней части катушки индуктивности 48 относительно внешней части, в данной катушке возникает электрический ток определенной величины и направления, который через электрические провода (на чертеже не показаны), скользящий электроконтакт 52, прикрепленный на боковой части катушки 37 барабана 13, передается по электрическому жгуты, прикрепленному внутри и вдоль лопасти 14 (на чертеже не показано) на сумматор 46 сигналов электрических токов и далее на электродвигатель 42 реверсивного типа управления серворулем 19, который отклоняясь на определенный угол, обладая большой эффективностью, отклоняет через стабилизатор 18 конец лопасти 14 синхронно с отклонением комлевой части лопасти.
Данная лопасть не имеет собственной жесткости на кручение вокруг продольной оси, поэтому летчик может в полете изменять крутку лопастей, подбирая лучшую для выполнения заданного режима полета, чем осуществляет также увеличение КПД винта, Данная система состоит из задатчика - летчика или системы автоматического управления, которые подают дополнительный электрический сигнал на сумматор 46, который дополнительно отклоняет серворуль 19 на определенный угол, накладывая это отклонение на величину отклонений от сигналов от катушки индуктивности 48. Крутка лопастей выполняется синхронно на всех лопастях. У данного несущего винта имеется электромеханическая система ограничения угла взмаха лопастей при непреднамеренном увеличении угла атаки (при порыве ветра и т.д.) или очень энергичном изменении пилотом установочных углов лопастей. Данная система выполнена по аналогии системы, описанной в патенте №2668482 от 18.07.2017 г., а датчики прикреплены внутри катушек 37 барабанов 13 (на чертеже не показано).
Перечисленные конструктивные преобразования несущего винта предложенного СВВП дают ему значительное увеличение тяги и КПД винта по сравнению с подобным несущим винтом и тяговооруженностью вертолета одновинтовой схемы, при этом, при убранном несущим винте такой СВВП может летать, как обычный самолет с любой скоростью, в том числе и сверхзвуковой, если самолет и маршевый двигатель рассчитаны на такую скорость.
Предложенный вертикально-взлетающий самолет может взлетать:
1) по вертолетному методу, как обычный вертолет одновинтовой схемы;
2) по автожирному методу;
3) по самолетному методу, как обычный самолет.
Для предотвращения разворота, от крутящего момента несущего винта при его работе, на предложенном СВВП вместо хвостового винта, имеются у маршевого двигателя управляемые воздушные створки 10 в районе выхлопного сопла, которые связаны с ножным управлением пилота (управлением по курсу). Одновременно при взлете, работе на режиме висения при максимальном крутящем моменте на несущем винте, пилот может регулировать боковую тягу воздушного потока от маршевого двигателя через управляемые створки также путем соразмерного увеличения мощности маршевого двигателя.
1) Для вертикального взлета по вертолетному на предложенном СВВП поворотная часть 3 крыла повернута вниз под 90 для уменьшения потерь от воздушного потока несущего винта, летчик увеличивает мощность подъемных двигателей 15 силовой установки несущего винта, маршевый двигатель работает на пониженном режиме и производит взлет аналогично взлету на вертолете одновинтовой схемы. С увеличением скорости горизонтального полета поворотная часть 3 крыла, летчиком с помощью ручного управления или системой автоматического управления от датчиков давления от набегающего воздушного потока, разворачивается и устанавливается в положении 3', т.е. с углом 10-20. Одновременно отклоняются вперед управляемые предкрылки 4' и крыло приобретает выпукло-вогнутый поперечный профиль, что соответствует увеличению подъемной силе крыла, а значит дает способность летательному аппарату производить полет на пониженной скорости. За счет увеличения мощности маршевого двигателя устанавливается скорость полета, когда крыло полностью воспринимает нагрузку (вес) от СВВП и тяга несущего винта становится ненужной. Лопасти несущего винта устанавливаются с нулевым установочным углом, уменьшаются обороты несущего винта до расчетных и включается система уборки-выпуска лопастей в режим "уборка" и лопасти 14 полностью убираются, складываются стабилизаторы и серворули, выключаются двигатели 15 силовой установки несущего винта и закрываются капоты 16. Далее увеличивается мощность маршевого двигателя, возрастает скорость горизонтального полета, одновременно убираются предкрылки 4, поворотная часть 3 крыла устанавливается с нулевым установочным углом, хвостовое оперение - кили 8, рули направления 9 и элероны 5' становятся эффективными, убираются шасси 20 и СВВП превращается в обыкновенный самолет. Если конструкция СВВП и его маршевого двигателя сконструированы и имеют возможность летать на сверхзвуковой скорости, то при возможности опускания несущего винта со свернутыми лопастями внутрь фюзеляжа, такой СВВП может летать на любой сверхзвуковой скорости.
При посадке предложенного СВВП действия производятся в обратном порядке.
2) При взлете предложенного СВВП по автожирному методу самолет производит вертикальный взлет и режим висения на низкой высоте в зоне влияния "воздушной подушки", как обычный вертолет одновинтовой схемы. При этом, поворотная часть 3 крыла повернута вниз под 90, а крутящий момент от несущего винта парируется газовыми струями, выходящими из управляемых воздушных створок 10 от маршевого двигателя. Несущий винт вращается в горизонтальной плоскости и вертикальная составляющая тяги винта направлена вертикально вверх, т.е. она максимальная, равна тяги винта и уравновешивает взлетный вес СВВП. Для начала движения вперед пилот увеличивает мощность и горизонтальную тягу маршевого двигателя не изменяя положения несущего винта. И сразу с началом движения СВВП в горизонтальном направлении, за счет набегающего дополнительного горизонтального потока воздуха на несущий винт у него начинается прирост тяги и СВВП начинает, вместе с движением вперед, энергично подниматься вверх. В зависимости от поставленной задачи, пилот продолжает энергичный набор высоты с более умеренным приростом горизонтальной скорости горизонтального полета или производит ручным управлением с помощью автомата перекоса наклон конуса (плоскости) вращения винта вперед и за счет появления составляющей общей тяги вперед производит более ускоренный разгон сначала горизонтальной скорости, а затем уже переходит в набор высоты.
При этом, с началом движения СВВП в горизонтальном направлении, поворотная часть 3 крыла пилотом или системой автоматического управления, устанавливается из вертикального положения 3'' в положение 3' и одновременно отклоняются вперед управляемые предкрылки 4. Дальнейшие действия производятся как при взлете СВВП по вертолетному методу. И хотя указанный взлет СВВП с ограниченной неподготовленной площадки имеет разницу во взлете "чистого" автожира, все же имеется много общего и желательно называть такой метод "автожирным", т.к. на автожире при возможности предварительной раскрутки несущего винта и за счет этого вертикального отрыва его от земли и, вслед за этим, разгон за счет тяги маршевого двигателя - имеется много общего.
При таком методе взлета у СВВП возникает возможность поднять больше взлетный вес, чем при взлете по вертолетному, потому, что при начале увеличения горизонтальной скорости в данном случае отсутствует необходимость отклонять конус винта вперед для получения составляющей горизонтальной тяги, и вследствие этого не происходит уменьшения составляющей вертикальной тяги винта, которая уравновешивает взлетный вес СВВП и не происходит уменьшения высоты полета (и возможного касания о землю) в момент увеличения горизонтальной скорости даже при максимальном взлетном весе без запаса мощности подъемных двигателей.
3) При взлете предложенного СВВП по самолетному, капоты несущего винта не открываются, подъемные двигатели не запускаются, а разгон по взлетной полосе и взлет производится за счет тяги маршевого двигателя, как на обычном самолете. При применении механизации крыла для уменьшения пробега при разгоне и уменьшении взлетной дистанции перед взлетом отклоняются вперед управляемые предкрылки, а закрылки отклоняются вниз и устанавливаются во взлетное положение. После разгона, отрыва и установления расчетной скорости, механизация крыла устанавливается в полетное положение и данный СВВП продолжает полет, как обычный самолет.
При посадке действия производятся в обратном порядке, кроме того, что закрылки устанавливаются в посадочное положение.
Предложенный СВВП может быть изготовлен полностью из российских материалов.
Изобретение относится к авиационной технике, а конкретно к самолетам вертикального взлета и посадки (СВВП) с несущим винтом. СВВП содержит фюзеляж с кабиной пилотов, крыло с возможностью отклонения вниз от 0 до 90 задней части для уменьшения потерь тяги несущего винта при вертикальном взлете и посадке от воздушного потока винта, механизацию крыла для уменьшения взлетно-посадочной дистанции и возможности полета самолета с уменьшенной скоростью горизонтального полета в "самолетном" режиме, хвостовое оперение самолета, шасси для передвижения по земной поверхности, маршевый двигатель и несущий винт с силовой установкой для вертикального взлета и посадки. Несущий винт выполнен со сворачивающимися и убираемыми в полете лопастями. После уборки лопастей несущий винт закрывается удобообтекаемыми капотами. Крутящий момент от несущего винта при его работе парируется воздушным потоком, отклоняемым воздушными створками от выхлопного сопла маршевого двигателя и соразмерным изменением мощности маршевого двигателя. Обеспечивается увеличение скорости и дальности полета, возможность вертикального взлета и посадки. 2 з.п. ф-лы, 5 ил.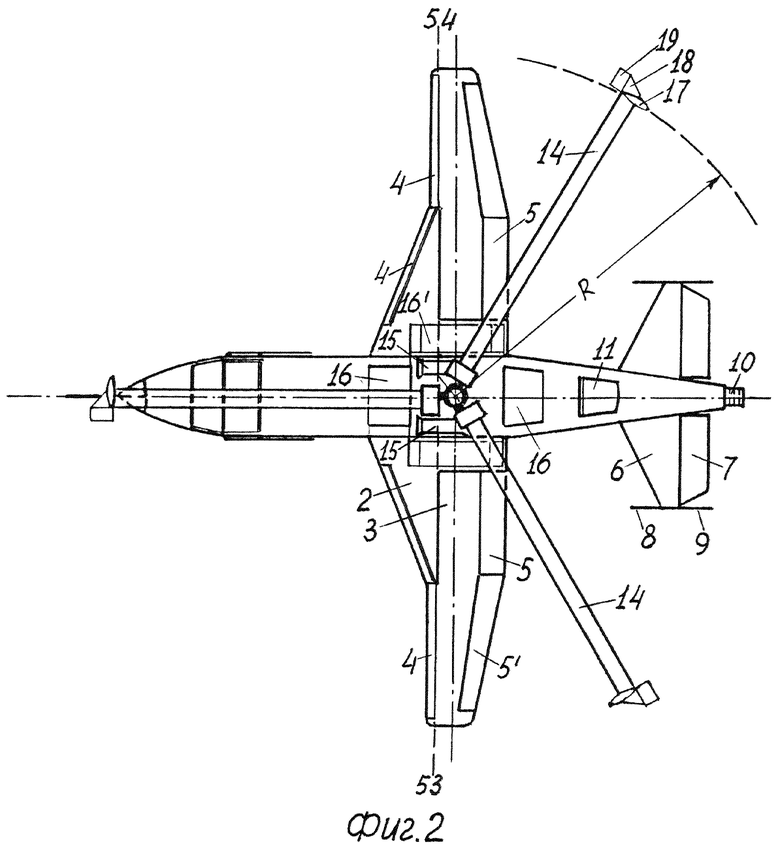
1. Самолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями, содержащий фюзеляж с кабиной пилотов, крыло с элеронами и механизацией для взлета и посадки, хвостовое оперение в виде стабилизатора с рулем высоты и килей с рулями направления, шасси для передвижения по земной поверхности, реактивный маршевый двигатель и имеется несущий винт с силовой установкой для вертикального взлета и посадки, отличающийся тем, что самолет имеет несущий винт со сворачивающимися убираемыми лопастями с прикрепленными на концах лопастей центробежными грузами, стабилизаторами и управляемыми серворулями, несущий винт прикреплен к редуктору несущего винта, который имеет привод от силовой установки, состоящий из реактивных двигателей и несущий винт со свернутыми на барабаны лопастями на земле или в полете в самолетном режиме закрывается обтекаемыми капотами, а крутящий момент от несущего винта при его работе парируется воздушным потоком, отклоняемым воздушными створками от маршевого двигателя, при этом крыло самолета выполнено с поворотной частью вниз от 0 до 90 для уменьшения сопротивления и потерь тяги винта при вертикальном взлете и посадке от воздушного потока несущего винта.
2. Самолет вертикального взлета и посадки по п. 1, отличающийся тем, что профиль лопастей несущего винта выполнен выпукло-вогнутым с одинаковой кривизной верхней и нижней поверхностей и имеющий хвостовик, и данный профиль позволяет лопастям, с помощью специальной системы уборки и выпуска, синхронно и плавно сворачиваться на барабаны без перекосов и поломок кромок лопастей, при этом после уборки лопастей складываются стабилизаторы и серворули, превращая несущий винт в компактную конструкцию.
3. Самолет вертикального взлета и посадки по п. 1, отличающийся тем, что управление несущим винтом осуществляется с помощью автомата перекоса и системы управления серворулями.
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2017 |
|
RU2668482C1 |
| US 6622962 B1, 23.09.2003 | |||
| US 6471158 B1, 29.10.2002 | |||
| СОПЛО ГАЗОСТРУЙНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВЕРТОЛЕТА | 2015 |
|
RU2607687C1 |
| ВЕРТОЛЕТ | 1993 |
|
RU2089455C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ НЕСУЩЕЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2594321C1 |

