Изобретение относится к авиационной технике, в частности к вертолетостроению, и может быть использовано при создании аппаратов вертикального взлета и посадки, а также для создания систем спасения возвращаемых объектов с управляемым приземлением и в катапультных сиденьях самолетов с возможностью ухода из неблагоприятного района места приземления.
Известен несущий винт летательного аппарата с гибкими убираемыми лопастями по изобретению США (патент US №3637168, МПК В64С 27/46, В64С 27/26, опубликован 25.01.1972 г.). В этом техническом решении несущий винт имеет гибкие лопасти, управляемые автоматом перекоса со штангами, каретками и каждая лопасть выполнена в виде одной продольной широкой прочной ленты, к передней кромке которой прикреплены профилированные центровочные грузы и к ним через определенные промежутки прикреплены профилированные хвостовики. При этом задняя часть, где расположены профилированные хвостовики, залита легким пористым эластичным материалом, образуя профиль лопасти.
Комлевая часть лопасти прикреплена к катушке барабана, а к концевой части прикреплен центробежный груз удобообтекаемой формы с жестко прикрепленным стабилизатором. Линия центров тяжести элементов лопасти расположена ближе к передней кромке. Комлевые части лопастей прикреплены к барабанам, расположенным симметрично относительно ведущего вала, оси вращения барабанов расположены горизонтально и барабаны крепятся к втулке винта бесшарнирно. Имеется механизм уборки и выпуска лопастей в виде вала, расположенного внутри ведущего вала и соединенного через муфту сцепления и редуктор с силовой установкой летательного аппарата. К нижней части вала прикреплена коническая шестерня, которая входит в зацепление с зубчатыми колесами, прикрепленными к барабанам, и имеется тормозное устройство в виде барабана с тормозными колодками и центробежным регулятором. Уборка лопасти осуществляется с помощью устройства уборки с отбором мощности от силовой установки летательного аппарата, а выпуск - за счет центробежной силы, действующей на лопасть и центробежный груз при вращении и с помощью тормозного устройства в виде тормозного барабана. Указанная конструкция имеем следующие недостатки.
1. Данный несущий винт имеет малый коэффициент полезного действия (КПД) и соответственно малую тягу винта из-за того, что:
а) профиль поперечного сечения лопасти имеет симметричную двояковыпуклую форму со срезом горизонтальных параллельных площадок с обоих сторон, что дает возможность лопасти сворачиваться на катушку барабана без перекоса и поломок кромок лопасти, но в тоже время такой поперечный профиль лопасти имеет малый КПД сравнимый с плоской пластиной, что в 1,5-2,0 раза меньше общепринятых двояковыпуклых несимметричных профилей, применяемых для вертолетов, например профиль NACA - 23009;
б) также увеличивают лобовое сопротивление щели между центровочными грузами, прикрепленными к передней кромке ленты лопасти;
в) изменение установочных углов лопастей только с помощью автомата перекоса с каретками и штангами в районе комлевых частей малоэффективно, т.к. вследствие малой жесткости на кручение лопасти в продольном направлении при вращении винта конец каждой лопасти удерживается неуправляемым стабилизатором в плоскости вращения с нулевым углом атаки, а при увеличении длины штанг теряется смысл уборки лопастей.
2. а) У данного винта нет механизмов складывания стабилизаторов в убранном положении лопастей, что ухудшает компактность винта с убранными лопастями;
б) у данного винта нет регулятора ограничения угла взмаха лопасти при резких порывах воздушных потоков в вертикальной плоскости;
в) система выпуска лопастей за счет центробежной силы и тормозных барабанов не обеспечивает плавности и безопасности выпуска лопастей, т.к. добиться равномерности срабатывания тормозных центробежных барабанов практически очень затруднительно, возникает сильная расбалансировка винта с дальнейшим быстрым выпуском лопастей наподобие «выстрела» с большой нагрузкой на крепление комлевых частей лопастей с катушками барабанов, что не гарантирует от разрушения крепления;
г) у данного несущего винта отсутствуют вертикальные шарниры крепления лопастей к втулке винта, в горизонтальном полете из-за возникновения маховых движений лопастей и соответственно колебательных движений каждой лопасти в горизонтальной плоскости от сил кариолиса будут изменяться натяжения передних и задних кромок лопастей, вследствие этого возможны изменения формы лопастей, поэтому возможны возникновения резких колебаний и неустойчивости работы лопастей и всего винта.
Известен несущий винт летательного аппарата с гибкими убираемыми лопастями (патент RU №2005655, МПК В64С 11/20 - 15.01.1994 г.), содержащий устройство для торможения винта, автомат перекоса с каретками управления и устройство для свертывания лопастей, отличающийся тем, что гибкие лопасти закреплены непосредственно на валу несущего винта в таком положении, что хорды их профилей параллельны оси винта, а установочный угол лопастей определен положением кареток управления автомата перекоса, при этом уборка и наматывание гибких лопастей на вал несущего винта осуществляется за счет кинетической энергии вращения при торможении винта фрикционной муфтой.
Данный несущий винт имеет следующие недостатки.
1) В комлевой части при свертывании на вал происходит перегиб лопасти (закручивание вокруг продольной оси) до 90°, что при практической работе винта, когда на комлевую часть лопасти действует большая продольная сила от действия центробежной силы массы самой лопасти и действия центробежной силы от массы центробежного груза (вместе со стабилизатором и рулем) и эта общая продольная сила сжимает и нарушает форму лопасти, что неминуемо приведет к ее разрушению. Так, например, на несущем винте с убираемыми лопастями аналогичном по размерам и частоте вращения, как на вертолете Ми-8, общая центробежная сила будет равна 40000 кг.
2) Конструкция автомата перекоса в виде длинных штанг с каретками является мало работоспособной, т.к. при такой конструкции всегда будут присутствовать большие люфты, что недопустимо при управлении несущим винтом, во избежание нарушения устойчивости его работы, тем более при длинных штангах теряется смысл уборки лопастей для его компактности.
3) У данного винта нет регулятора ограничения угла взмаха лопасти при резких порывах воздушных потоков в вертикальной плоскости.
4) Система выпуска лопастей за счет центробежной силы и тормозных барабанов не обеспечивает плавности выпуска лопастей, т.к. добиться равномерности срабатывания тормозных барабанов практически очень затруднительно, что приводит к сильной расбалансировке винта с дальнейшим быстрым выпуском лопастей наподобие «выстрела» с большой нагрузкой на крепление комлевых частей лопастей к барабанам и не гарантирует от разрушения. Уборка лопастей также нерегулируемая, что может приводить или к неполной уборке лопасти или к чрезмерно быстрой безостановочной уборке с ударом центробежного груза об ограничители.
5) Отсутствие вертикальных шарниров в креплениях лопастей, при маховых движениях лопастей, а также при выпуске и уборке лопастей, вследствие возникновения кариолисовых сил будут изменять натяжения передних и задних кромок лопастей, что приведет к колебаниям лопастей и неустойчивой работе всего винта.
6) У лопасти отсутствует стабилизатор, а к плоскому центробежному грузу к задней части прикреплена рулевая поверхность. Но в виду отсутствия жесткости на кручение у лопасти вокруг продольной оси данная рулевая поверхность должна иметь увеличенную площадь, а т.к. она должна стабилизировать работу лопасти и одновременно при необходимости выводить ее из условия стабилизации и устанавливать на другой установочный угол, то площадь данной рулевой поверхности должна быть значительно увеличена.
Данная рулевая поверхность выполнена нескладываемой, что ухудшает компактность винта с убранными лопастями.
Известен патент (RU №2385267, МПК В64С 27/24 - 27.03.2010 г., Бюл. №9), где описан способ преобразования дискового крыла, заключающийся в выдвижении инерционными силами через фильеры на периметре вращающегося дискового крыла лопастей, присоединенных тросами к барабану, расположенному на оси крыла, и в уборке их в полость диска при торможении барабана и наворачивании на него тросов вращающимся дисковым крылом, отличающийся тем, что лопасти в завершающей стадии выдвижения из крыла своей комлевой частью жестко фиксируются с торсионами, соединяющими втулку несущего винта с фильерами, закрепленными в крыле на сферических эластомерных подшипниках, создающих горизонтальный и вертикальный шарниры лопастей, с возможностью управления их углами атаки и ограничением взмахов, а в горизонтальном полете, когда лопасти убраны и вращение диска остановлено, из него выдвигаются консоли крыла.
Далее указанный способ отличается тем, что при необходимости полета на несущем винте с большими перегрузками положение втулки винта по высоте выполняется регулируемым.
И следующее - консолями крыла могут служить и лопасти, если они имеют соответствующую изгибную жесткость и чичевичеобразный профиль с одинаковыми характеристиками обтекания с носовой и хвостовой части.
Недостатками конструкции, предложенной по патенту №2385267, является то, что:
а) дисковое крыло с выпускаемыми по периметру лопастями, с расположенной в нем механизацией управления лопастями с системой уборки и выпуска лопастей, с усиленным корпусом от нагрузок лопастей и выдвигающихся консолей крыльев имеет больший вес, чем аналогичное по площади обычное самолетное крыло;
б) дисковое крыло имеет меньший КПД на крейсерских и меньших скоростях полета, чем подобное по площади самолетное крыло;
в) вертолетная лопасть не может быть консолью крыла, т.к. не обладает жесткостью на изгиб в вертикальной плоскости. Жесткость на изгиб она приобретает при работе винта (вращении) с определенной частотой вращения и окружной скоростью за счет растяжения в продольном направлении центробежной силой, действующей от ее же массы. А чтобы вертолетная лопасть могла стать консолью самолетного крыла, она должна иметь жесткость и прочность на изгиб, а значит и размер и вес, как самолетное крыло, что не подходит для вертолетной лопасти;
г) система выдвижения консолей крыла по бокам дискового крыла дает увеличение подъемной силы дисковому крылу, а также дает возможность управления дисковым крылом и самим летательным аппаратом по крену и тангажу, но вместе с этим значительно усложняется сама конструкция дискового крыла и увеличивается вес самого диска;
д) система выпуска лопастей с помощью центробежной силы и тормозных колодок и уборка с помощью притормаживания барабанов во время вращения диска крыла не обеспечивает плавность выпуска лопастей из-за того, что при выпуске лопастей центробежная сила от массы самой лопасти с увеличением радиуса винта возрастает в квадратичной зависимости, поэтому даже при постоянных оборотах винта с помощью только тормозных колодок очень сложно добиться равномерного выпуска. Под конец выпуска возможен срыв с тормоза и быстрый выпуск лопастей с ударом на ограничивающие их фильеры, что не отвечает безопасности всей конструкции винта. А уборка лопастей, с помощью притормаживания барабана, также не отвечает безопасности из-за того, что в последний момент возможен удар лопасти о барабан. Установка же дополнительной регулирующей и контролирующей системы, обеспечивающей плавность и безопасность выпуска и уборки лопастей, значительно усложняет конструкцию и вес дискового крыла;
е) перемещения втулки винта по высоте вала винта с целью уменьшения нагрузки на корпус диска винта от вертикальной составляющей центробежной силы лопасти путем уменьшения излома действующей центробежной силы в фильере требует дополнительной механизации, а значит увеличения общего веса диска винта. Причем при перемещении втулки нарушаются связи систем управления винтом, что значительно усложняет конструкцию винта.
Известен патент (RU №2594321, МПК В64С 3/14, В64С 27/32 - 10.08.2016 г., Бюл. №22) «Аэродинамический профиль несущей поверхности летательного аппарата», который позволяет эластичной лопасти несущего винта сворачиваться (наматываться) на катушку барабана без повреждения кромок лопасти, превращая несущий винт в компактную конструкицию, и одновременно несущий винт с таким поперечным профилем лопастей имеет значительно улучшенный КПД по сравнению с вертолетными лопастями с общепринятыми профилями.
Задачей предлагаемого изобретения является создание работоспособного, компактного с убранными лопастями, имеющего повышенные аэродинамические характеристики несущего винта для вертикально взлетающих аппаратов.
Известный несущий винт летательного аппарата с гибкими убираемыми лопастями по изобретению патента US №3637168, являющийся ближайшим аналогом к заявленному несущему винту, взят за прототип, а также «Аэродинамический профиль несущей поверхности летательного аппарата» по патенту RU №2594321 взят за прототип.
Техническим результатом, на решение которого направлено предлагаемое изобретение, является разработка легкого имеющего повышенный КПД и тягу компактного с убранными лопастями несущего винта, имеющего необходимую устойчивость в работе и управляемость при любых режимах полета, обладающего повышенной плавной и регулируемой скоростью выпуска и уборки лопастей.
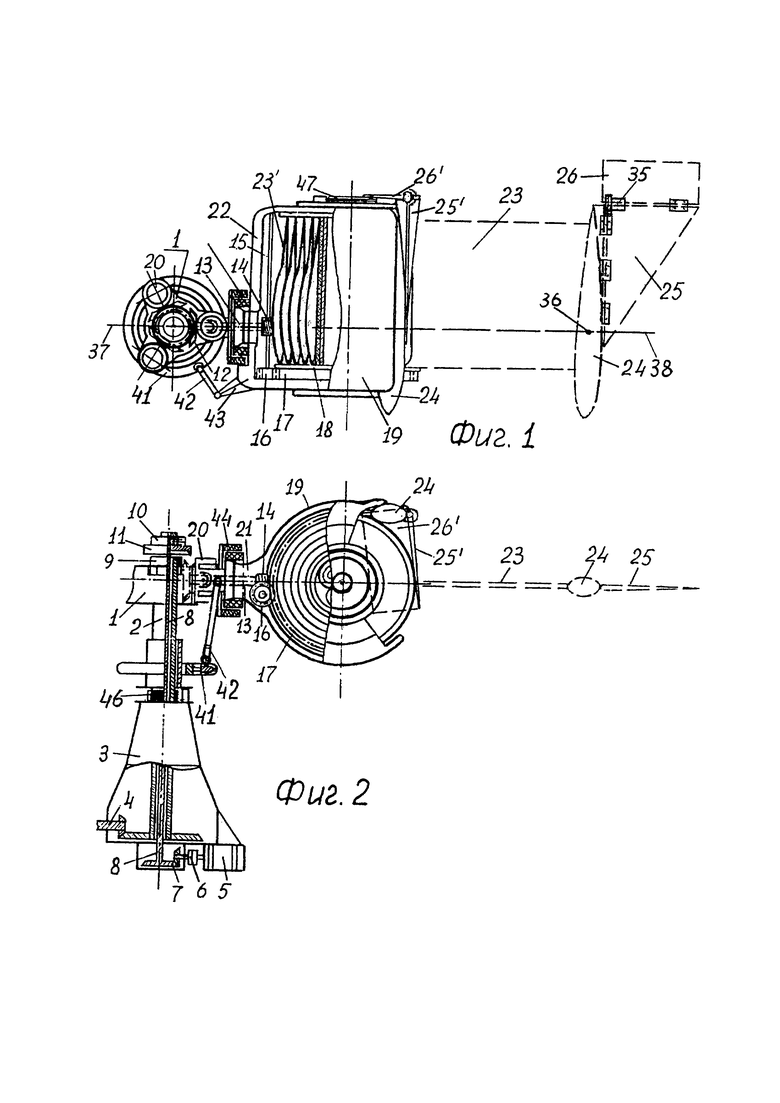
Сущность изобретения поясняется чертежами, на которых изображено следующее:
На фиг. 1 представлен общий вид несущего винта по изобретению с убранной лопастью, вид сверху;
На фиг. 2 - несущий винт с убранной лопастью, вид с боку;
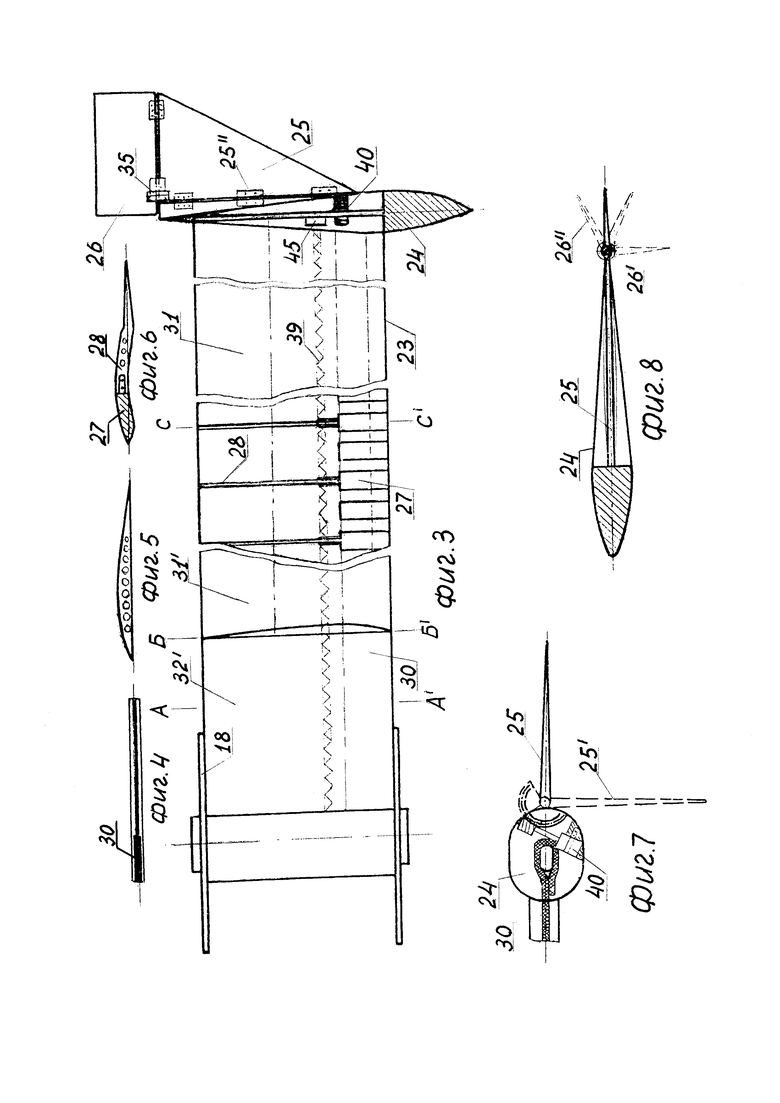
На фиг. 3 - конструкция эластичной лопасти с профилем по патенту RU №2594321;
На фиг. 4 - поперечное сечение комлевой части лопасти по А-А1;
На фиг. 5 - сечение лопасти по Б-Б1, участок лопасти;
На фиг. 6 - сечение лопасти по С-С1, основной рабочий участок лопасти с профилем сечения по патенту RU №2594321;
На фиг. 7 - механизм уборки и установки в рабочее положение стабилизатора;
На фиг. 8 - центробежный груз с показом возможных отклонений серворуля;
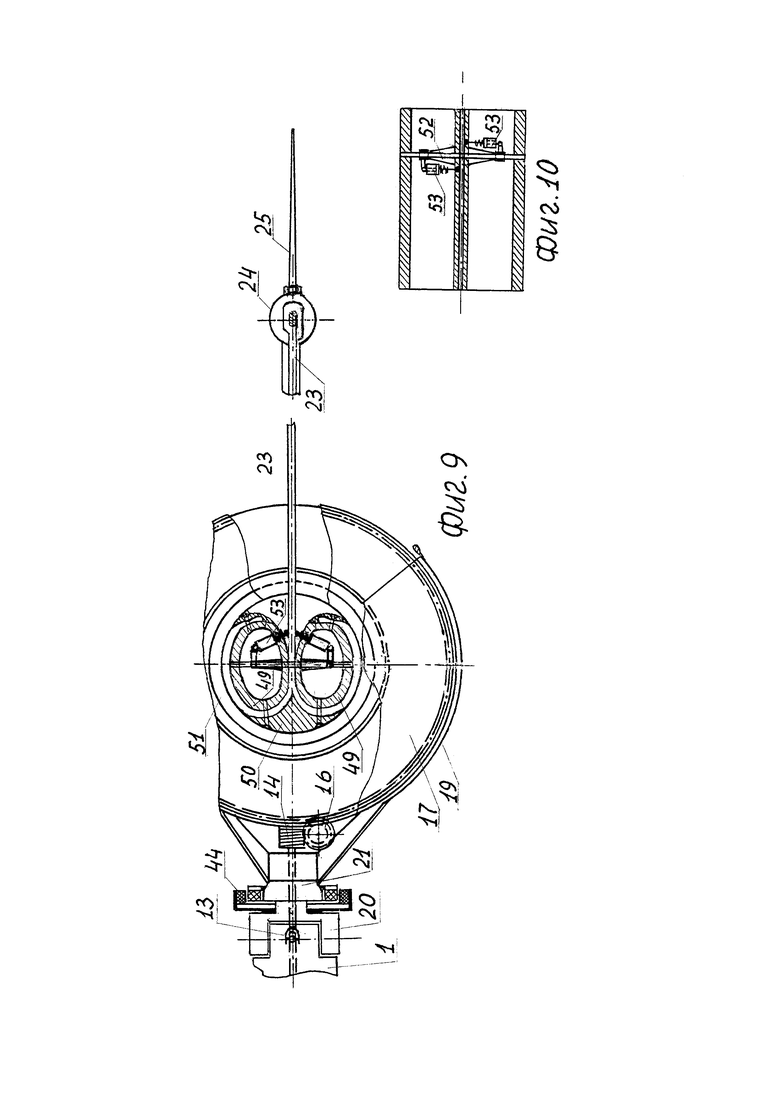
На фиг. 9 - барабан с вырезами и сечениями с видом на элементы системы ограничения углов взмаха лопасти;
На фиг. 10 - осевая часть катушки барабана в разрезе с элементами системы ограничения углов взмаха лопасти;
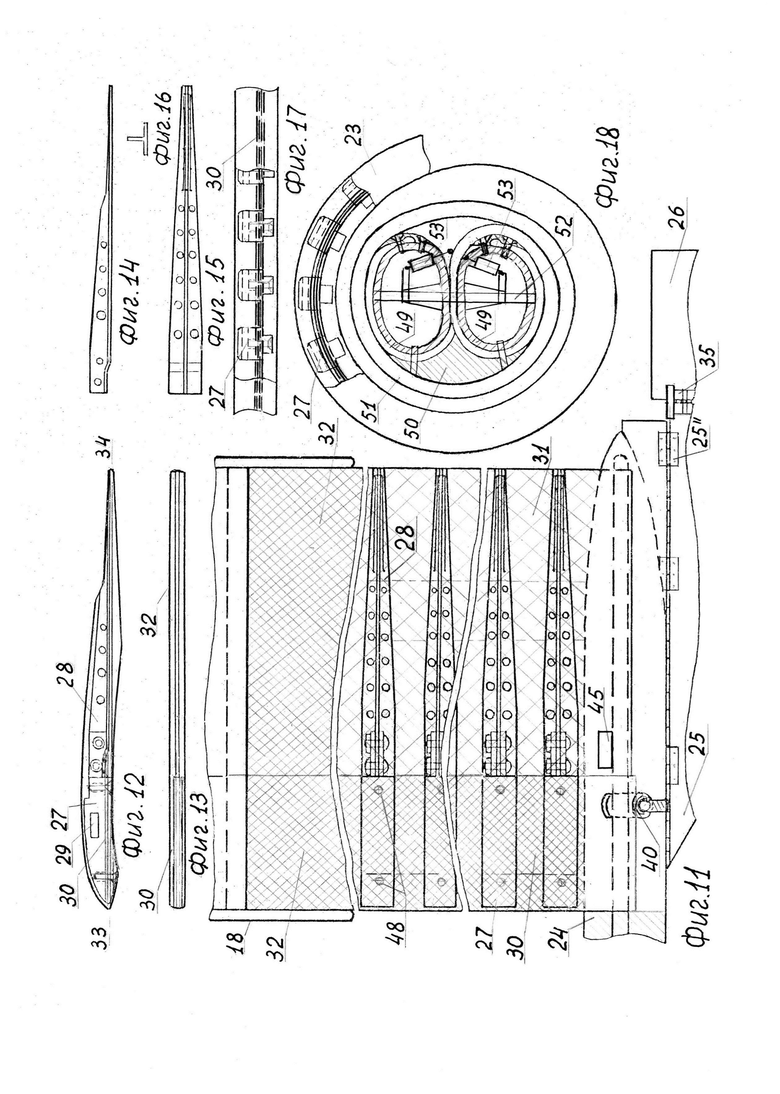
На фиг. 11 - полуразрез лопасти, вид сверху;
На фиг. 12 - профиль поперечного сечения рабочей части лопасти в увеличенном виде, согласно патента RU №2594321;
На фиг. 13 - профиль поперечного разреза комлевой части лопасти;
На фиг. 14 - хвостовик поперечного сечения профиля лопасти (вид с боку);
На фиг. 15 - хвостовик поперечного сечения профиля лопасти (вид сверху);
На фиг. 16 - поперечное сечение хвостовика профиля лопасти;
На фиг. 17 - продольный полуразрез лопасти по передней кромке лопасти;
На фиг. 18 - показана принципиальная схема сворачивания лопасти на барабан с показом элементов внутри барабана системы ограничения углов взмаха лопасти.
Несущий винт содержит втулку 1 несущего винта, закрепленную на ведущем вале 2 редуктора 3, имеющего привод 4 от силовой установки летательного аппарата, прикрепленные к нижней части редуктора 3 двигатель 5 реверсивного типа, нижняя муфта сцепления 6 и нижний редуктор 7, соединенный с внутренним валом 8, к верхнему концу которого прикреплена электромагнитная муфта 9 выравнивания оборотов ведущего 2 и внутреннего 8 валов и устройство 10 включения в работу раздаточной шестерни 11, входящей в зацепление с зубчатыми колесами 12. Карданный валик 13 прикреплен одним концом к колесу 12, а другим - к самотормозящейся червячной передаче 14, состоящей из червяка и червячной шестерни, закрепленной на промежуточном вале 15, к которому прикреплена малая ведущая шестерня 16, входящая в зацепление с большим зубчатым колесом 17, прикрепленным к катушке 18 барабана 19, который крепится к втулке 1 с помощью вертикального 20 и осевого 21 шарниров и вилки 22. К катушке 18 одним концом прикреплена эластичная лопасть 23, к другому концу которой прикреплен центробежный груз 24 со стабилизатором 25; 23' - лопасть в свернутом положении в барабане. 25'' - шарниры крепления стабилизатора и серворуля; 26 - серворуль; 27 - металлический профилированный элемент профиля поперечного сечения лопасти; 28 - хвостовик поперечного сечения лопасти; 29 - сквозное отверстие в металлическом профилированном элементе для лучшего склеивания с плотным эластичным материалом; 30 - усиленная передняя часть ленты лопасти; 31 - задняя часть ленты лопасти, залитая легким пористым эластичным материалом; 31 - промежуточный участок лопасти; 32' - комлевая часть лопасти. 32 - комлевая и передняя часть лопасти залитая плотным эластичным материалом; 33-34 - средняя аэродинамическая хорда профиля поперечного сечения лопасти. 35 - двигатель управления серворулем; 36 - общий центр тяжести центробежного груза, стабилизатора и серворуля; 37-38 - общая линия центров тяжести элементов лопасти и центробежного груза, продольная ось вращения лопасти и линия фокусов элементов лопасти; 39 - жгут электропроводов, проложенных внутри и вдоль лопасти; 25' - стабилизатор в сложенном положении; 26' - серворуль в сложенном положении; 25'' - шарниры крепления стабилизатора и серворуля; 26'' - отклонение серворуля при работе лопасти. 40 - механизм складывания и установки в рабочее положение стабилизатора; 41 - автомат перекоса; 42 - тяга автомата перекоса; 43 - рычаг вилки 22; 44 - катушка индуктивности системы управления серворулем; 45 - сумматор сигналов электрических токов системы управления серворулем; 46 - скользящие электроконтакты передачи электроэнергии от силовой установки летательного аппарата к главному редуктору; 47 - скользящие электроконтакты электросистемы управления несущим винтом; 48 - крепление металлических профилированных элементов к усиленной передней части лопасти; 49 - два эллипсовидных цилиндра осевой части барабана; 50 - крепежная накладка; 51 стяжное кольцо катушки барабана; 52 - вертикальная стойка внутри эллипсовидных цилиндров; 53 - электромагнитные катушки с подпружиненными сердечниками и датчиками отклонения лопасти в вертикальной плоскости - ограничители углов взмаха лопасти.
Предлагаемый несущий винт работает следующим образом. Сначала рассматривается работа несущего винта и его системы управления при выпуске и уборке лопастей.
Для начала работы винта его электросистему подключают к электроэнергетической установке летательного аппарата через скользящий контакт 46. После этого включается система установки в рабочее положение серворуля 26 и стабилизатора 25, для чего через жгут электропроводов 39 подается электроток на электродвигатель 35 реверсивного типа управления серворулем и после установки серворуля подается электроток на механизм 40 складывания и установки в рабочее положение стабилизатора. Электроконтакты убранного и установленного положения стабилизатора и серворуля на чертеже не показаны.
Далее включается механический привод 4 от силовой установки ЛА к редуктору 3, который начинает вращать ведущий вал 2 редуктора 3 с прикрепленной к нему втулкой 1 с барабанами 19, прикрепленными в втулке с помощью вертикальных 20 и осевых 21 шарниров. Перед началом выпуска лопастей с помощью автомата перекоса 41, тяги 42, рычага 43 и вилки 22 барабаны 19 устанавливаются с нулевым установочным углом.
Затем подается электроток на электромагнитную муфту 9, которая выравнивает обороты ведущего вала 2 с внутренним валом 8, при этом электромуфта 6 находится в разъединенном положении. После этого подается электроток на устройство 10, которое раздаточную шестерню 11 опускает вниз и происходит зацепление с зубчатыми колесами 12 (по количеству лопастей).
Для начала выпуска лопастей подается электроток на электродвигатель 5 реверсивного типа, который начинает вращаться с заданными оборотами и соединяется электромуфтой 6 с нижним редуктором 7, соединенным с внутренним валом 8. При уменьшенных оборотах электродвигателя 5 внутренний вал 8 с раздаточной шестерней 11 начинает вращать зубчатые колеса 12, которые через карданные валики 13, соединенные с самотормозящимися червячными передачами 14, передают вращение на промежуточные валики 15, на конце каждой из них закреплена малая ведущая шестерня 16, входящая в зацепление с большим зубчатым колесом 17, прикрепленным к катушке 18, барабана 19. И все катушки барабанов начинают синхронно вращаться с заданной скоростью, а лопасти 23 под действием центробежных сил от массы конца лопасти и массы центробежного груза 24 (совместно с массой стабилизатора 25 и серворуля 35 начинают плавно выпускаться (разматываться с катушек 18 барабанов 19). После полного выпуска лопастей срабатывают выключатели, разъединяются электромуфты 6 и выключаются электродвигатели 5, т.е. лопасти выпускаются не только синхронно и с заданной скоростью, но и по желанию их выпуск возможно ускорить или замедлить или вообще, отключив электромуфты 6, остановить в промежуточном положении.
Далее с помощью устройства 10 разъединяется раздаточная шестерня 11 с зубчатыми колесами 12 и барабаны 19 получают возможность с помощью автомата перекоса 41, тяги 42 и рычага 43 изменять установочные углы комлевых частей лопастей, т.е. винт готов к работе.
При уборке лопастей (сворачивании их на барабаны) система уборки работает в обратном порядке.
Перед включением системы уборки с помощью автомата перекоса 41 барабаны 19 устанавливаются с нулевыми установочными углами. Далее подается электроток на электромагнитную муфту 9, которая выравнивает обороты ведущего вала 2 с внутренним валом 8, при этом электромуфта 6 находится в разъединенном положении. Затем подается электроток на устройство 10, которое раздаточную шестерню 11 опускает вниз и происходит зацепление с зубчатыми колесами 12, соединенными карданными валиками 13 с самотормозящимися червячными передачами 14, соединенными, в свою очередь, через промежуточные валы 15 с малыми ведущими шестернями 16, входящими в зацепление с большими зубчатыми колесами 17, прикрепленными к катушкам 18 барабанов 19. После этого включается электродвигатель 5 реверсивного типа с направлением вращения на «уборку» и устанавливают ему заданные обороты. Вслед за этим включается электромуфта 6 и начинается синхронная и плавная уборка лопастей (намотка лопастей на катушки 18 барабанов 19).
Изменяя обороты двигателя 5, возможно изменять скорость уборки лопастей или вообще, отключив электромуфту 6, остановить уборку в промежуточном положении. После полной уборки лопастей срабатывают выключатели, разъединяются электромуфты 6 и выключаются электродвигатели 5. Далее подается электроток на механизмы 40 складывания стабилизаторов 25 в убранное положение, после чего подается электрический ток на электродвигатели 35 реверсивного типа управления серворулями 26 и они складываются в убранное положение.
При уборке - сворачивании лопастей на катушки 18 барабанов 19 каждая лопасть 23, имеющая выпукло-вогнутый профиль поперечного сечения основной рабочей ее длины, согласно патенту RU №2594321 и как показано на фиг. 3, 4, 5, 6, на фиг. 12 и фиг. 18, плотно без перекосов и повреждения кромок укладывается одна на другую и несущий винт превращается в компактную конструкцию, как показано на фиг. 1 и фиг. 2. После этого отключается электропитание от несущего винта.
В полете при движении летательного аппарата обороты несущего винта при выпуске и уборке лопастей должны регулироваться летчиком или системой автоматического управления по заданной программе с учетом выдерживания заданной общей (от массы лопасти и центробежного груза) центробежной силы, действующей на каждую лопасть, и отсутствия обратного обтекания воздушным потоком стабилизаторов 25 с серворулями 26.
При работе несущего винта и отклонении барабана 19 на разные установочные углы вместе с ним отклоняется и внутренняя часть катушки индуктивности 44, прикрепленная к внешней части осевого шарнира 21. А внешняя часть катушки индуктивности 44 прикреплена к внутренней части осевого шарнира 21. Вследствие этого в катушке возникает электрический ток, который подается к смесителю сигналов электрических токов 45 и далее на электродвигатель 35 реверсивного типа, отклоняя серворуль 26 синхронно с отклонением комлевой части лопасти на заданный угол установки.
Продольная ось вращения лопасти 37-38 проходит через центр тяжести 2 элементов лопасти, общий 1 центр тяжести центробежного груза (совместно со стабилизатором и серворулем) 36 и осевой шарнир 21 барабана 19 и расположена на расстоянии 23.5-26.5% от передней кромки лопасти. Линия фокусов элементов лопасти также расположена на продольной оси вращения лопасти или незначительно сзади нее. Таким образом, при изменении установочных углов продольное вращение лопасти происходит по линии центров тяжести элементов лопасти с минимальными моментами изменения установочных углов.
Аэродинамическая жесткость лопасти создается за счет сил растяжения от действия центробежной силы массы самой лопасти и массы центробежного груза (совместно со стабилизатором и серворулем) и оборотов винта.
Крутильная жесткость вокруг продольной оси вращения 37-38 лопасти создается в комлевой части лопасти за счет крепления лопасти к катушке барабана, стабилизатора на конце лопасти и натяжения кромок лопасти от действия центробежных сил, действующих на лопасть.
Отсутствие горизонтального шарнира в креплении барабана к втулке несущего винта заменяется креплением комлевой части эластичной ленты лопасти к внутренней части катушки 18 барабана 19, как показано на фиг. 9.
При работе несущего винта в полете при поступательном движении из-за разности скоростей движения лопастей в набегающем и отступающем воздушном потоке возникают маховые движения лопастей относительно втулки винта, которые частично устраняются с помощью автомата перекоса 41. Из-за маховых движений лопастей возникают силы кариолиса, которые стремятся ускорить или замедлить скорость движения (вращения) лопастей. Вследствие этого барабаны 19 имеют возможность поворачиваться вокруг вертикальных шарниров 20.
При возникновении резких изменений установочных углов лопастей с помощью автомата перекоса или резком воздушном потоке в вертикальном направлении, могут возникнуть сверхдопустимые колебания (маховые движения) лопастей, что может нарушить устойчивую работу винта. Для исключения такого явления имеется система ограничения угла взмаха лопасти, как показано на фиг. 9, фиг. 10 и фиг. 18, где установлено внутри центральной части катушки 18 барабана 19 устройство в виде вертикальной стойки 52, проходящей через оба эллипсовидных цилиндра 49 осевой части катушки барабана с прикрепленными электромагнитными катушками 53 с подпружиненными сердечниками - датчиками отклонения лопасти в вертикальной плоскости. При отклонении лопасти 23 более допустимого угла, с катушки 53 подается электрический ток в сумматор сигналов электрических токов 45, с которого подастся электрический ток на двигатель 35 управления серворулем 26, который отклоняется в соответствующую сторону на определенный угол и создается момент, уменьшающий чрезмерное отклонение лопасти.
В связи с тем, что у данной лопасти отсутствует собственная жесткость на кручение вокруг продольной оси вращения, с помощью системы управления винтом, непосредственно во время работы винта возможно изменять крутку всех лопастей путем отклонения на разные установочные углы комлевые и концевые части лопастей. Что значительно может улучшить тягу и КПД винта на заданном режиме полета и данная система состоит из задатчика (летчика или системы автоматического управления), отдельных электрических проводов в электрожгуте 39 в лопасти 23, сумматора сигналов электрических токов 45, электрических проводов внутри центробежного груза 24 и двигателя 35 управления серворулем 26.
Использование предложенного несущего винта в конструкции вертикально взлетающего самолета позволяет ему иметь лучшее качество самолета - далеко и быстро летать - и лучшее качество вертолета - вертикально садиться и взлетать с любой неподготовленной поверхности и производить работу на режиме висения. Данный несущий винт обладает улучшенной компактностью с убранными лопастями. Также данный несущий винт имеет повышенный КПД винта при работе по сравнению с аналогичным по размерам винтом с жесткими лопастями. Обладает простотой, плавностью, синхронностью и в итоге надежностью системы уборки и выпуска лопастей, устойчивостью и управляемостью на всех режимах работы.
Все указанные улучшенные качества несущего винта необходимы и применимы для всех летательных аппаратов, где возможно применение несущего винта с эластичными убираемыми лопастями.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ НЕСУЩЕЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2594321C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВАЛОВА ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ЭЛАСТИЧНОЙ ЛОПАСТИ НЕСУЩЕГО ВИНТА КОМБИНИРОВАННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2043948C1 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА С ГИБКИМИ УБИРАЕМЫМИ ЛОПАСТЯМИ | 1991 |
|
RU2005655C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДИСКОВОГО КРЫЛА | 2008 |
|
RU2385267C1 |
| НЕСУЩИЙ ВИНТ ПРИВАЛОВА | 1994 |
|
RU2093418C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДИСКОВОГО КРЫЛА В НЕСУЩИЙ ВИНТ | 2015 |
|
RU2609847C1 |
| НЕСУЩИЙ ВИНТ, СКЛАДЫВАЕМЫЙ И РАСКРЫВАЕМЫЙ В ПОЛЕТЕ | 2022 |
|
RU2787115C1 |
| САМОЛЕТ | 2014 |
|
RU2569165C1 |
Изобретение относится к авиационной технике, в частности к конструкциям несущих винтов. Несущий винт со сворачивающимися убираемыми лопастями содержит вал главного редуктора, к верхнему концу которого прикреплена горизонтально расположенная втулка несущего винта с приливами по количеству лопастей. В каждый прилив установлен вертикальный шарнир, к которому прикреплен осевой шарнир, к которому, в свою очередь, прикреплен барабан с расположенной внутри катушкой, к которой прикреплена комлевой частью эластичная лопасть. Лопасти несущего винта имеют выпукло-вогнутый профиль, позволяющий компактно без перекосов и поломок кромок лопастей синхронно сворачиваться-наматываться на катушки барабанов и разворачиваться с них с помощью системы регулируемой уборки и выпуска лопастей. К другому концу каждой лопасти прикреплен центробежный груз со стабилизатором с управляемым серворулем. Обеспечивается уменьшение габаритов и массы несущего винта, увеличение КПД винта, улучшение его работоспособности и управляемости. 7 з.п. ф-лы, 18 ил.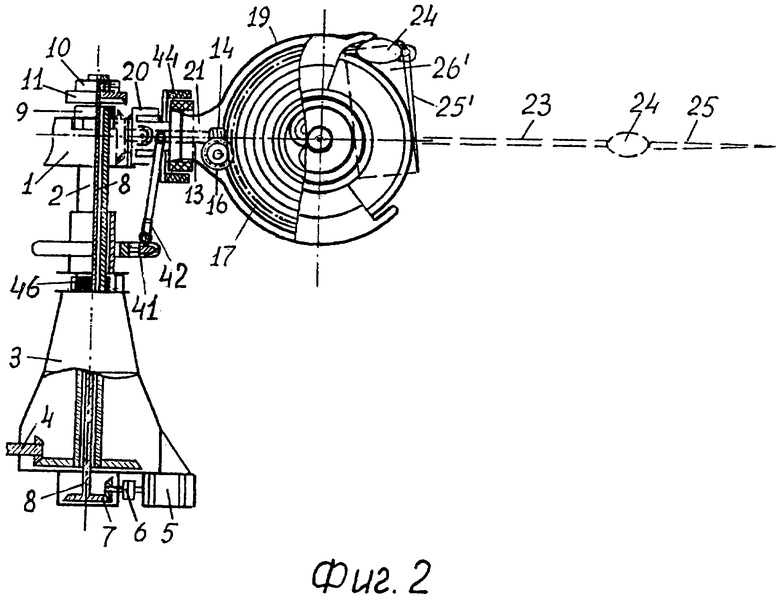
1. Несущий винт летательного аппарата со сворачивающимися убираемыми лопастями, содержащий главный редуктор, имеющий привод от силовой установки летательного аппарата с расположенным ведущим валом, к верхнему концу которого прикреплены барабаны, оси которых расположены горизонтально, и к барабанам прикреплены комлевыми частями эластичные прямоугольной формы в плане лопасти, к другим концам которых прикреплены центробежные грузы со стабилизаторами, и к эластичной силовой ленте лопасти к передней кромке прикреплены центровочные грузы, к задним концам которых прикреплены хвостовики, образующие профиль лопасти и залитые легким пористым эластичным материалом, и линия центров тяжести элементов лопасти расположена ближе к передней кромке, и лопасти выпускаются за счет действия центробежных сил от массы самой лопасти и массы центробежного груза, а уборка осуществляется путем отбора мощности от силовой установки летательного аппарата через редуктор с помощью вала, расположенного внутри ведущего вала, и прикрепленной конической шестерни, соединенной с зубчатыми колесами, прикрепленными к барабанам, и управление винтом осуществляется с помощью автомата перекоса, отличающийся тем, что к верхнему концу ведущего вала главного редуктора прикреплена горизонтально расположенная втулка несущего винта с приливами по количеству лопастей и в каждый прилив установлен вертикальный шарнир, к которому прикреплен осевой шарнир, который, в свою очередь, прикреплен к барабану с расположенной внутри катушкой, к которой прикреплена лента комлевой части эластичной лопасти, путем обмотки раздвоенной части ее вокруг двух пустотелых цилиндров эллипсовидной формы в сечении, прикрепленных к вилке барабана с помощью стягивающих колец и подшипников, а к другому концу каждой лопасти прикреплен шарнирно стабилизатор с управляемым серворулем.
2. Несущий винт по п. 1, отличающийся тем, что лопасть состоит из прочной эластичной легкой ленты, имеющей прочностное утолщение по всей длине шириной 24-26% от носка передней кромки, и к передней кромке прикреплены профилированные центровочные грузы, к которым к задней части прикреплены хвостовики профилированной формы, и область с центровочными грузами и комлевая часть ленты залиты плотным эластичным материалом, а область хвостовиков залита ячеистым легким эластичным материалом и вся лопасть покрыта тонким слоем плотным эластичным материалом, образуя гладкую сплошную поверхность, а внутри лопасти проложен электрический кабель передачи электроэнергии от силовой установки летательного аппарата к механизмам уборки и установки в рабочее положение стабилизаторов и механизмам управления серворулями и лопасть, начиная от центробежного груза, по длине рабочей части имеет выпукло-вогнутый профиль поперечного сечения, причем верхняя и нижняя поверхности имеют одинаковую кривизну и нижняя кривая поверхность не пересекает хорду поперечного сечения лопасти, а верхний контур сечения со стороны задней кромки имеет вогнутость вниз, образуя хвостовик профиля, и промежуточная часть лопасти, имеющая длину в один оборот катушки барабана, имеет плоско-выпуклый профиль, причем верхняя выпуклая часть профиля имеет кривизну такую же, как и у профиля основной рабочей части, а комлевая часть лопасти имеет плоский профиль поперечного сечения, и линия центров тяжести элементов лопасти, расположенная на прямой на расстоянии 24-26% САХ от передней кромки, проходит через центр тяжести центробежного груза (совместно со стабилизатором и серворулем), осевой шарнир, вертикальный шарнир и ось втулки несущего винта.
3. Несущий винт по п. 1, отличающийся тем, что система уборки и выпуска лопастей содержит двигатель реверсивного типа, соединенный через муфту сцепления и нижний редуктор с внутренним валом главного редуктора, к верхнему концу которого прикреплено электромагнитное устройство выравнивания оборотов внешнего и внутреннего валов, и далее следующее электромагнитное устройство соединяет раздаточную шестерню с коническими шестернями (по количеству лопастей), соединенными карданными валиками, проходящими через вертикальные и осевые шарниры, с самотормозящимися червячными передачами, и каждая передача соединена с малой шестерней, закрепленной на промежуточном валике, на конце которого закреплена малая ведущая шестерня, соединенная с большим зубчатым колесом, прикрепленным к щеке катушки барабана.
4. Несущий винт по п. 1, отличающийся тем, что система уборки и выпуска лопастей имеет дополнительную систему уборки и установки в рабочее положение стабилизаторов и серворулей, выполненную в виде отдельных электропроводов в электрожгуте, закрепленном внутри лопасти, на которые подается управляющий электрический сигнал, который далее подается на электрический двигатель реверсивного типа, закрепленный в центробежном грузе, установки стабилизатора в рабочее положение и фиксации его, далее подается электрический сигнал на электрический двигатель реверсивного типа управления серворулем с установкой его в рабочее положение, а при уборке стабилизатора и серворуля система работает в обратном порядке.
5. Несущий винт по п. 1, отличающийся тем, что винт имеет систему управления изменения установочных углов комлевых и концевых частей лопастей по общему и циклическому шагу в виде автомата перекоса, тяг, соединяющих автомат перекоса с рычагами вилок барабанов, барабанов с закрепленными внутри катушками с прикрепленными к ним эластичными лопастями и с прикрепленными к осевым шарнирам электромагнитными катушками, скользящих электроконтактов, соединительных электрических проводов, жгута электрических проводов, закрепленного внутри и вдоль лопасти, электрических проводов внутри центробежного груза, электромотора реверсивного типа управления серворулем, прикрепленного к задней части стабилизатора, и сумматора электрических токов, прикрепленного внутри центробежного груза.
6. Несущий винт по п. 1, отличающийся тем, что у данного винта есть система изменения крутки лопасти, выполненная в виде задатчика электрического тока по определенной программе, отдельных электрических проводов в электрожгуте, закрепленном внутри лопасти, электрических проводов внутри центробежного груза, сумматора электрических токов, электромотора реверсивного типа управления серворулем и самого серворуля.
7. Несущий винт по п. 1, отличающийся тем, что система ограничения угла взмаха лопастей выполнена в виде электромеханизма, расположенного внутри эллипсовидных цилиндров катушки барабана для каждой лопасти, состоящего из вертикальной стойки, проходящей через оба эллипсовидных цилиндра осевой части катушки барабана, с прикрепленными электромагнитными катушками с подпружиненными сердечниками-датчиками отклонения лопасти в вертикальной плоскости, отдельных электрических проводов в электрожгуте внутри лопасти, сумматора сигналов электрических токов, электрических проводов внутри центробежного груза и электродвигателя реверсивного типа, прикрепленного к задней части стабилизатора и серворуля.
8. Несущий винт по п. 1, отличающийся тем, что колебательные движения лопасти в плоскости вращения несущего винта, возникающие вследствие сил кариолиса, образующихся при маховых движениях лопасти, обеспечиваются возможностью разворота барабана вокруг вертикального шарнира.
| RU 94036149 A1, 10.07.1996 | |||
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА С ГИБКИМИ УБИРАЕМЫМИ ЛОПАСТЯМИ | 1991 |
|
RU2005655C1 |
| САМОЛЕТ | 2014 |
|
RU2569165C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ НЕСУЩЕЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2594321C1 |
| US 3637168 A1, 25.01.1972 | |||
| US 3065799 A1, 27.11.1962. | |||

