Изобретение относится к области подводного кораблестроения, в частности к спасательным подводным аппаратам, предназначенным, преимущественно, для спасения экипажей аварийных подводных лодок, лежащих на грунте, и доставляемых к месту аварии на транспортных самолетах и десантируемых с них.
Известен спасательный подводный аппарат (патент РФ №2334650, д.пр. 09.01.2007), включающий герметичные отсек управления и спасательный отсек со средствами обеспечения жизнедеятельности, расположенные в прочном корпусе, камеру присоса с переходным люком, движительно-рулевой комплекс, средства стабилизации, функциональное электрооборудование и систему наддува. В районе его центра тяжести выполнен дополнительно малый герметичный отсек в виде водолазной камеры, которая соединена с камерой присоса посредством герметичного люка, выполненного в ее нижней части, а также сообщена со штатной системой наддува. При этом упомянутая водолазная камера расположена между отсеком управления и спасательным отсеком с возможностью сообщения с ними посредством герметичных люков, выполненных в ее переборках. В кормовой части прочного корпуса за спасательным отсеком выделен герметичный необитаемый электромеханический отсек, в который вынесено функциональное электрооборудование, не нуждающееся в постоянном обслуживании и наблюдении.
Недостатком является крупногабаритная конструкция спасательного подводного аппарата, которая не позволяет осуществить транспортировку спасательного подводного аппарата на место аварии транспортным самолетом и десантирование с самолета.
Известна спасательная авиадесантируемая система (патент РФ №2707860. д. пр. 19.04.2019), состоящая из двух и более обитаемых подводных буксировщиков и прочной спасательной эвакуационной капсулы. Доставку системы к месту проведения работ осуществляют транспортным самолетом, с борта которого сбрасывают элементы спасательной авиадесантируемой системы, после приводнения которых и «отстреливания» парашютов проводят операцию по стыковке спасательной эвакуационной капсулы с комингс-площадкой аварийной подводной лодки для спасения личного состава.
Недостатком использования двух рабочих подводных буксировщиков совместно с крупногабаритной спасательной эвакуационной капсулой, рассчитанной на размещение экипажа аварийной подводной лодки (численностью порядка 60 человек и более), является весьма сложный, трудоемкий и сопряженный с определенным риском процесс стыковки в подводном положении рабочих подводных буксировщиков со спасательной эвакуационной капсулой и последующая транспортировка спасательной эвакуационной капсулы к аварийной подводной лодки и установка спасательной эвакуационной капсулы на комингс-площадку аварийной подводной лодки с помощью совместной работы двух рабочих подводных буксировщиков. Кроме этого, располагаемые в РФ транспортные самолеты не обеспечивают загрузку, транспортировку и последовательное десантирование с одного самолета трех крупногабаритных объектов - спасательной эвакуационной капсулы и двух рабочих подводных буксировщиков, т.е. необходимо привлекать для транспортировки и последующего десантирования 2-3 самолета транспортной авиации.
Известен спасательный подводный аппарат LR5 (Е.Р. Агишев, М.А. Ерпулев, статья «Конструктивные особенности спасательного подводного аппарата LR5», журнал «Судостроение», №3, 1998 г., стр. 20-22), принятый за прототип и включающий цилиндрический прочный корпус из армированного стеклопластика с концевыми прочными переборками, внутри которого установлены переборки с переходными люками с образованием командного отсека с прочной разделительной переборкой, пультом управления и креслом для оператора, спасательного отсека с входным люком, камерой присоса и балластными цистернами для замещения массы спасаемых и грузов и агрегатного отсека. Агрегатный отсек включает электропривод, как минимум, одного маршевого движителя, гидравлические системы, система распределения энергии. В верхней части корпуса установлена прозрачная рубка из акрила, в носовой части амортизационное устройство, носовое подруливающее устройство. Также спасательный подводный аппарат включает креново-дифферентные и уравнительные цистерны, вертикальные и горизонтальные подруливающие устройства в виде забортных поворотных колонок с гребными винтами в насадках. Аккумуляторные батареи и балластные цистерны расположены в нижней части спасательного аппарата забортно. Как минимум, одна аккумуляторная батарея установлена как минимум, в одном прочном забортном цилиндрическом контейнере с возможностью его сброса для срочного всплытия. Для обследования подводных объектов и выполнения подводно-технических работ спасательный аппарат снабжен двумя манипуляторами. Габариты прочного корпуса 2,94 × 2,74 × 9,6, масса 15 т.
Недостатком является то, что конструкция спасательного подводного аппарата требует использования судна-носителя для его доставки к месту аварии подводной лодки. Конструкция спасательного аппарата не позволяет использовать авиатехнику для его транспортировки и десантирования в район аварии.
Технической проблемой является создание авиадесантируемого спасательного подводного аппарата, конструкция которого обеспечивала бы возможность его транспортировки авиатехникой и возможность его десантирования в район аварии подводной лодки,
Техническим результатом является расширение эксплуатационных возможностей, в частности, за счет обеспечения возможности транспортировки авиатехникой и десантирования спасательного подводного аппарата.
Технический результат достигается тем, что в авиадесантируемом спасательном подводном аппарате, включающем цилиндрический прочный корпус с концевыми носовой и кормовой прочными переборками, внутри которого установлены переборки с переходными люками с образованием командного отсека с прочной разделительной переборкой, пультом управления и креслом оператора, спасательного отсека с входным люком, камерой присоса и балластными цистернами для замещения массы спасаемых и грузов, и агрегатного отсека, носовое подруливающее устройство, балластные, креново-дифферентные и уравнительные цистерны, вертикальные и горизонтальные подруливающие устройства, как минимум, один маршевый гребной электродвигатель, как минимум, одну аккумуляторную батарею, размещенную в нижней части прочного корпуса, как минимум, в одном прочном забортном цилиндрическом контейнере, установленным с возможностью его сброса для срочного всплытия, носовая переборка прочного корпуса выполнена торосферической формы или торосферической формы в сочетании с усеченным конусом и снабжена иллюминаторами, которые выполнены диаметром 150-400 мм и распределены по поверхности носовой прочной переборки и прочного корпуса, который снабжен замками крепления парашютных строп, выполненными с возможностью их дистанционного раскрытия с пульта управления в командном отсеке, в котором кресло оператора выполнено с возможностью поворота вокруг вертикальной оси на 180° и вокруг горизонтальной оси для наклона и снабжено системой горизонтальной амортизации, а цистерны главного балласта, креново-дифферентные цистерны, уравнительные цистерны, четыре вертикальных подруливающих устройства расположены в булевых наделках, установленных на прочном корпусе побортно над центральной горизонтальной плоскостью прочного корпуса, за кормовой прочной переборкой которого кормовым обтекателем легкого корпуса образована кормовая оконечность, в которой установлены кормовое горизонтальное подруливающее устройство и, как минимум, один вертикально закрепленный маршевый гребной электродвигатель с возможностью его поворота на 90° в горизонтальное рабочее положение вне обводов прочного корпуса, при этом авиадесантируемый спасательный подводный аппарат выполнен с центром тяжести, расположенным в диаметральной плоскости и смещенным к носовой переборке на расстояние не более трех метров от крайней точки кормовой оконечности.
Аппарат может быть выполнен со следующими габаритными-размерами: длина не более 8600 мм, ширина не более 3400 мм, высота не более 3000 мм, а его десантируемая сухая масса не более 20 т.
Система амортизации кресла оператора может быть выполнена в виде амортизатора и горизонтальных направляющих рельсов, установленных на палубе командного отсека, при этом амортизатор прикреплен одной частью к основанию кресла, а другой стороной закреплен к палубе командного отсека, а кресло оператора выполнено с возможностью его перемещения по направляющим рельсам вдоль командного отсека.
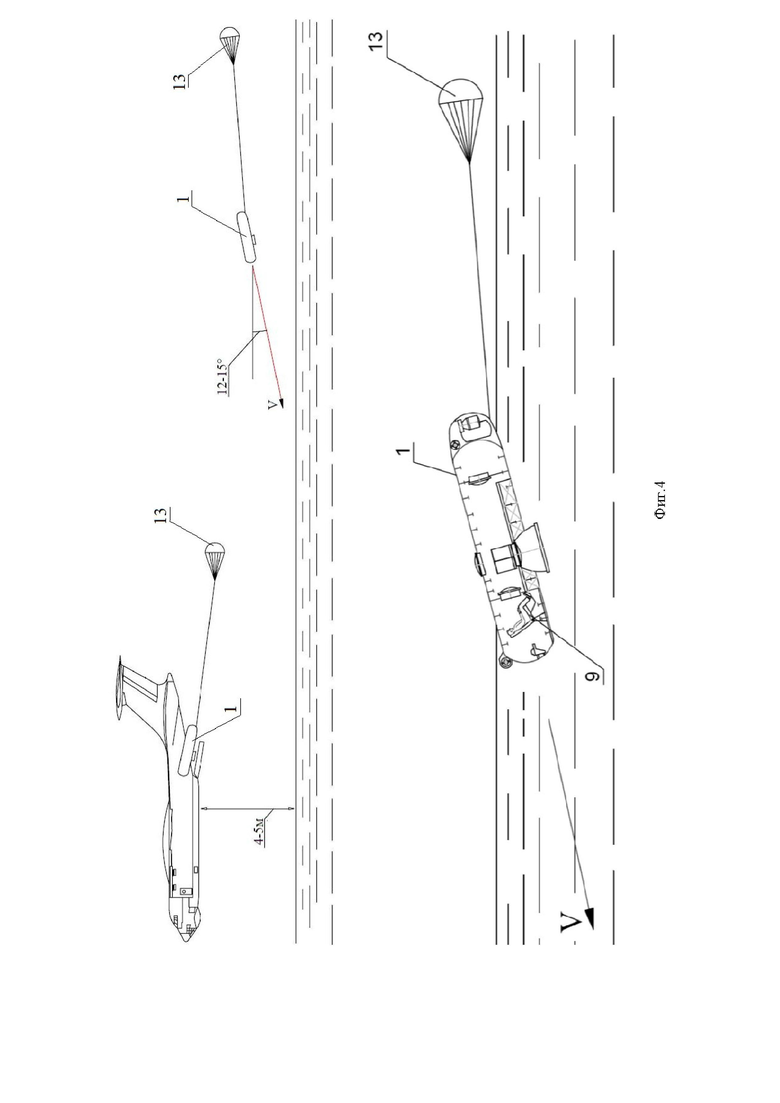
Съемные замки крепления парашютных строп могут быть установлены с возможностью десантирования авиадесантируемого спасательного подводного аппарата в воздушном пространстве с помощью тормозного-вытяжного парашюта с ориентацией под углом 12-15° к горизонту.
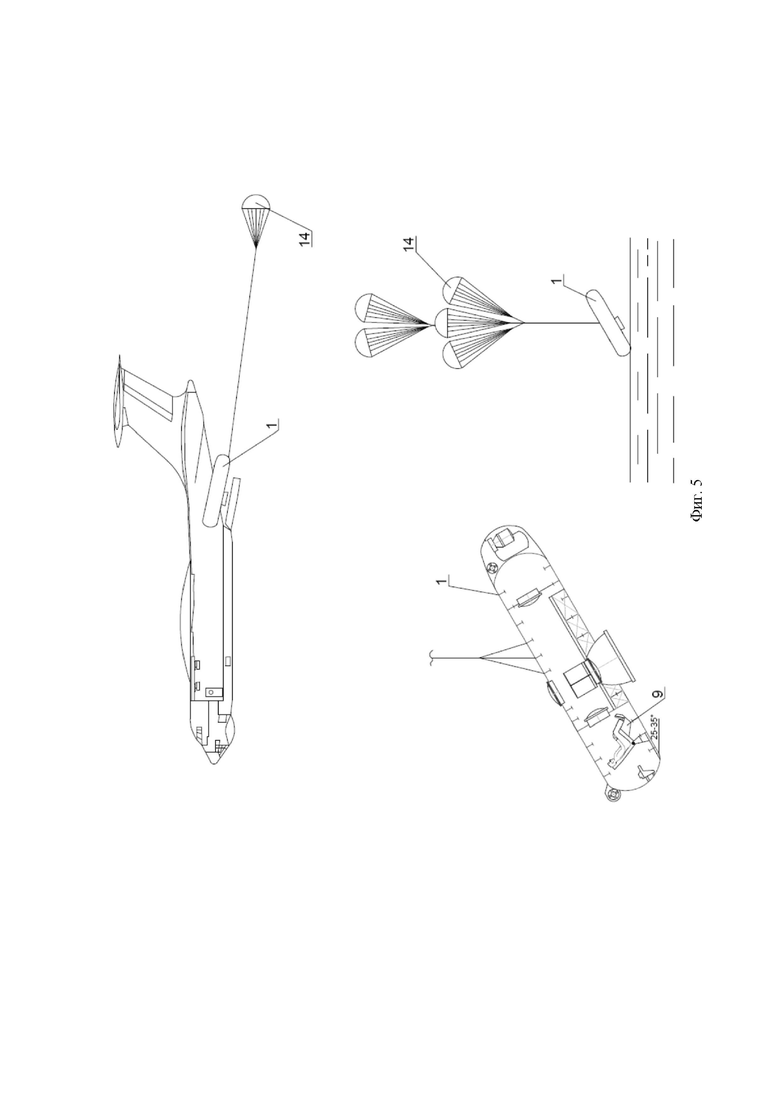
Съемные замки крепления парашютных строп могут быть установлены сверху прочного корпуса вдоль диаметральной плоскости с возможностью десантирования авиадесантируемого спасательного подводного аппарата в воздушном пространстве с помощью многокупольной парашютной системы с ориентацией его под углом 25-35° к горизонту.
Съемные замки крепления парашютных строп могут быть выполнены механическими с электроприводом и дополнительно снабжены аварийными пироболтами, выполненными с возможностью их дистанционного управления с пульта управления в командном отсеке.
Входной люк может быть снабжен съемными поворотными створками, установленными на прочном корпусе с возможностью их поворота в вертикальное положение в надводном положении с образованием сборного кожуха или их сброса с пульта управления в командном отсеке.
Спасательный отсек может быть снабжен, как минимум, одним складным креслом оператора с амортизатором для защиты оператора от ударных нагрузок и, как минимум, одним складным креслом-кроватью для нетранспортабельного спасаемого, установленным с возможностью его раскрытия над камерой присоса под входным люком.
Переборка агрегатного отсека может быть выполнена легкой, а баллоны со сжатым воздухом и медицинским кислородом могут быть установлены в кормовой оконечности вне прочного корпуса
В носовой части прочного корпуса может быть установлен компактно сложенный манипулятор, подвижные элементы которого дополнительно прижаты к прочному корпусу подвижными упорами или замками, дистанционно управляемыми с пульта управления в командном отсеке.
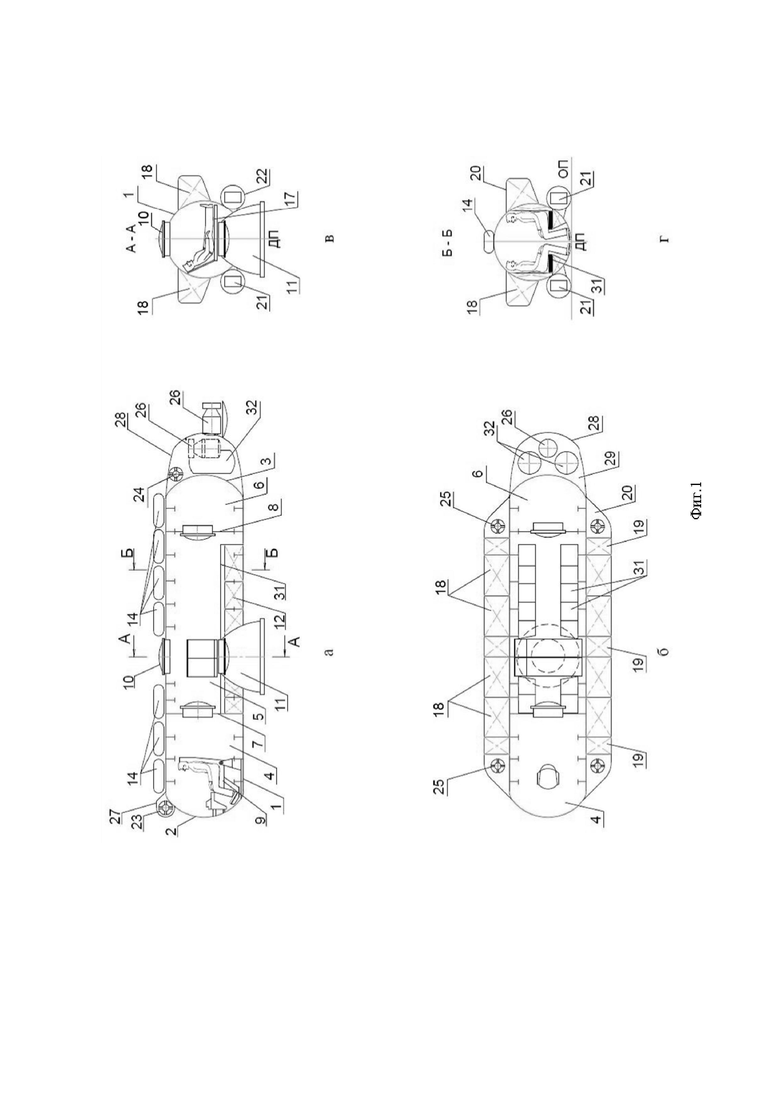
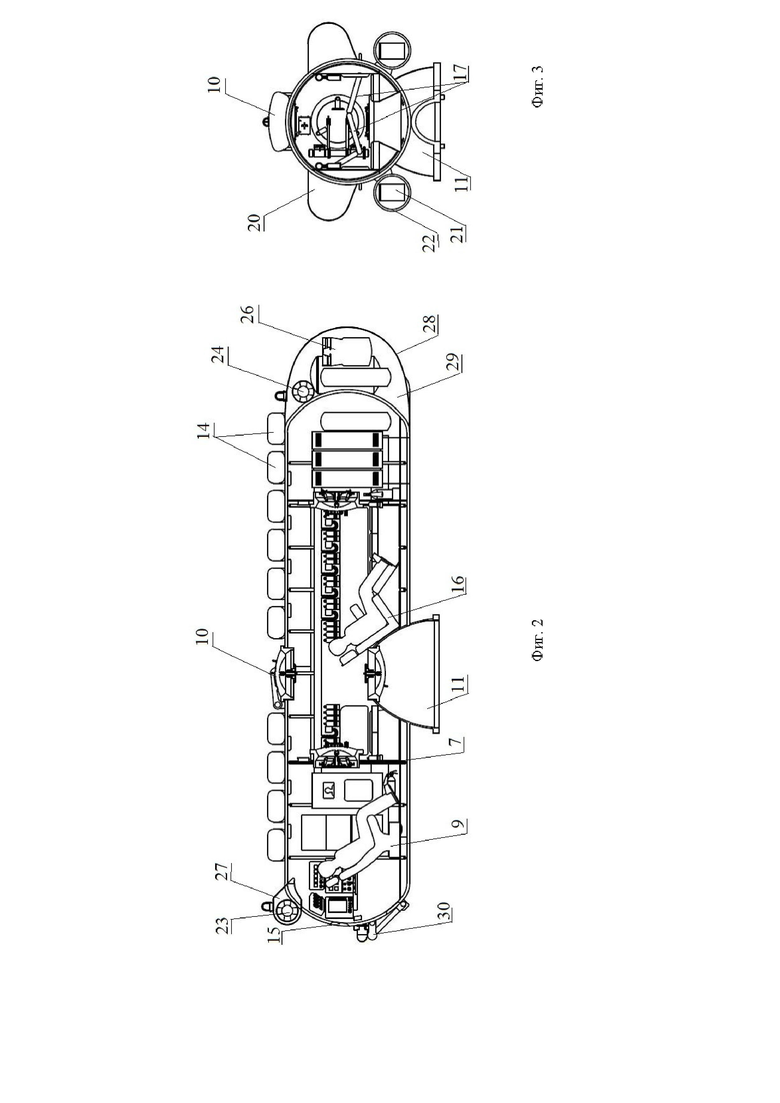
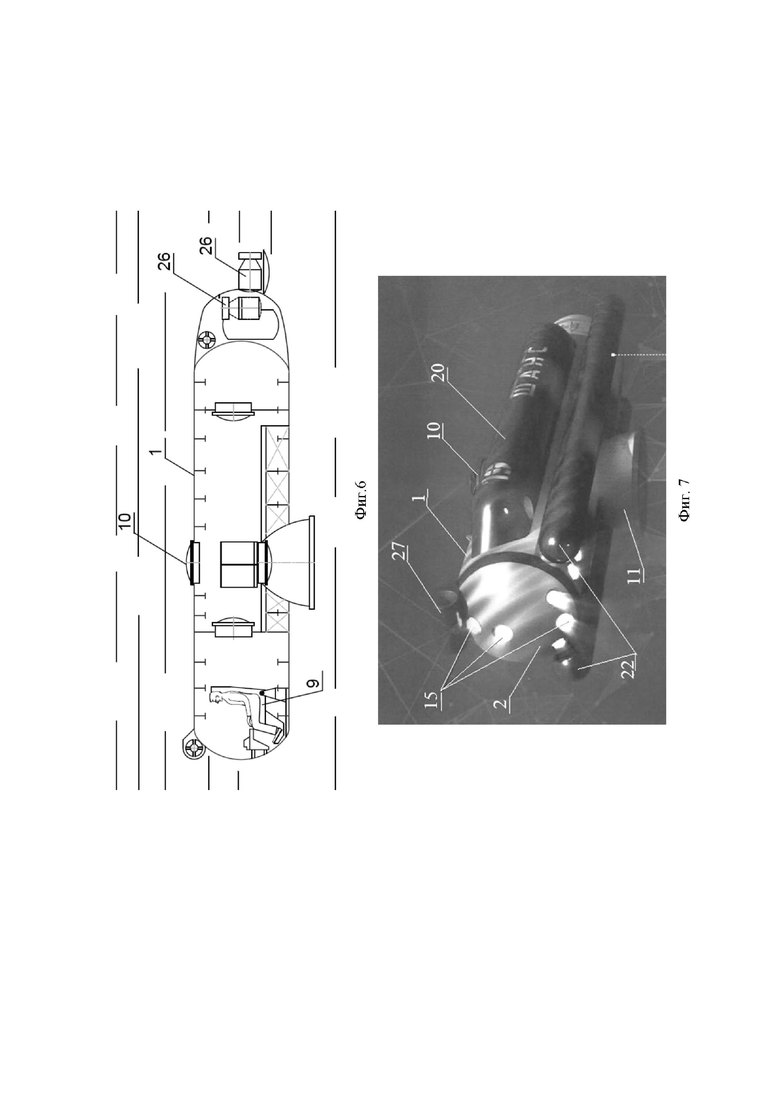
Изобретение авиадесантируемый спасательный подводный аппарат (далее АСПА) поясняется чертежами. На фиг.1 представлены: а - продольный разрез по диаметральной плоскости прочного корпуса с торосферической носовой переборкой, 6 - план палубы, в и г - поперечные сечения А-А и Б-Б соответственно, размещение спасаемых в спасательном отсеке АСПА на кресле-кровати над камерой присоса под входным люком и на сидячих местах. На фиг.2 представлен продольный разрез АСПА с двумя креслами для операторов в момент десантирования. На фиг.3 представлено поперечное сечение в спасательном отсеке АСПА, складное кресло-кровать установлено над камерой присоса. На фиг.4 представлен вариант десантирования АСПА с самолета типа Ил-76 с помощью тормозного-вытяжного парашюта со сверхмалых высот. На фиг.5 представлен вариант десантирования АСПА с самолета типа Ил-76 с помощью многокупольной парашютной системы. На фиг.6 схематично представлен продольный разрез АСПА в момент погружения. На фиг.7 представлен внешний вид АСПА.
Авиадесантируемый спасательный подводный аппарат включает цилиндрический прочный корпус 1 с носовой 2 и кормовой 3 концевыми прочными переборками. Внутри цилиндрического прочного корпуса 1 установлены две переборки с переходными люками с образованием командного отсека 4, спасательного отсека 5 и агрегатного отсека 6. Переборка 7 между командным отсеком 4 и спасательным отсеком 5 выполнена прочной, переборка 8 между спасательным отсеком 5 и агрегатным отсеком 6 выполнена легкой. Прочная переборка 7 между командным 4 и спасательным отсеком 5 обеспечивает эвакуацию спасаемых из отсека аварийной подводной лодки, находящихся под избыточным давлением, и защищает оператора АСПА от действия избыточного давления. Оборудование агрегатного отсека 6 выдерживает избыточное давление, поэтому переборка 8 выполнена легкой. Командный отсек 4 включает прочную разделительную переборку 7, пульт управления, одно креслом оператора 9. Спасательный отсек включает входной люк 10, камеру присоса 11, балластные цистерны 12 для замещения массы спасаемых и грузов. Агрегатный отсек 4 включает легкую переборку 8.
Прочный корпус 1 АСПА снабжен замками крепления парашютных строп, выполненными с возможностью их дистанционного раскрытия с пульта управления в командном отсеке 4 (не показано). Снабжение АСПА замками крепления парашютных строп для средств десантирования обеспечивает возможность десантирования АСПА, что расширяет эксплуатационные возможности АСПА.
Установку замков крепления парашютных строп осуществляют в зависимости от выбранных средств десантирования АСПА, которые определяются гидрометеоусловиями в районе аварии. В качестве средств десантирования АСПА с транспортного самолета используют тормозной-вытяжной парашют или много купольную парашютную систему, которые определяют скорость десантирования и возникающие при десантирования ударные нагрузки в зависимости от гидрометеоусловий в районе аварии.
Расположение замков крепления парашютных строп на прочном корпусе 1 обеспечивает положение АСПА в воздухе, определяя угол наклона АСПА к горизонту при десантировании и при его приводнении. Замки крепления парашютных строп могут быть съемными и установлены с возможностью десантирования АСПА в воздушном пространстве с помощью тормозного-вытяжного парашюта 13 с ориентацией под углом 12-15° к горизонту (фиг.4). Направление вектора скорости АСПА под острым углом к горизонту при десантировании обеспечивает уменьшение ударных нагрузок при приводнении на водной поверхности, свободной от битого или плавучего льда.
Замки крепления парашютных строп могут быть съемными и установлены с возможностью десантирования АСПА в воздушном пространстве с помощью многокупольной парашютной системы 14 с ориентацией его под углом 25-35° к горизонту (фиг.5). Ориентация АСПА под углом 25-35° к горизонту обеспечивает возможность его безопасного приводнения в условиях битого и плавучего льда или на сплошном ледяном покрове.
Носовая переборка 2 прочного корпуса 1 выполнена торосферической формы. Торосферическая форма уменьшает напряжения на участках сопряжения носовой переборки 2 в виде сегмента сферы и цилиндрической части корпуса 1, что обеспечивает повышение прочности и надежности прочного корпуса 1 при ударе об воду или лед при десантировании. Это предпочтительный вариант конструктивного исполнения носовой переборки для десантирования АСПА с помощью многокупольной парашютной системой 14.
Носовая переборка 2 прочного корпуса 1 выполнена торосферической формы в сочетании с усеченным конусом (не показано). Торосферическая форма в сочетании с усеченным конусом уменьшает сильные ударные нагрузки, возникающие в момент приводнения АСПА при его десантировании из транспортного самолета на большой скорости с помощью тормозного-вытяжного парашюта 13. Это предпочтительный вариант конструктивного исполнения носовой переборки для десантирования с помощью тормозного-вытяжного парашюта
Носовая переборка 2 снабжена иллюминаторами 15, которые выполнены диаметром 150-400 мм и распределены по поверхности носовой прочной переборки 2 и прочного корпуса 1 (фиг.7). Диаметр 150-400 мм каждого иллюминатора обеспечивает прочность иллюминатора при возникновении ударных нагрузок при десантировании, а расположение по поверхностям - обеспечивает достаточный угол обзора в передней полусфере и в области нижней полусферы в подводном положении АСПА.
АСПА снабжен, как минимум, двумя креслами оператора, одно из которых установлено в командном отсеке 4, другие в спасательном отсеке 5. В командном отсеке 4 кресло оператора 9 выполнено с возможностью поворота вокруг вертикальной оси на 180° и вокруг горизонтальной оси для наклона и снабжено системой горизонтальной амортизации (не показано).
Выполнение кресла оператора с возможностью его поворота вокруг вертикальной оси на 180° и вокруг горизонтальной оси для наклона позволяет установить кресло оператора в положение, которое обеспечивает уменьшение воздействия ударных нагрузок на оператора в направлении грудь-спина при десантирования с помощью многокупольной парашютной системы 14. Максимально возможные ударные нагрузки на операторов возникают при десантировании с помощью тормозного вытяжного парашюта 13.
Снабжение кресла оператора 9 системой горизонтальной амортизации обеспечивает дополнительное уменьшение воздействия сильных ударных нагрузок на оператора АСПА, возникающих при десантировании с помощью тормозного вытяжного парашюта 13.
Спасательный отсек 5 снабжен, как минимум, одним складным одним креслом 16 оператора с амортизатором для защиты от ударных нагрузок при десантировании (фиг.2). Конструкция кресел операторов 9 и 16 в командном и спасательном отсеках 4 и 5 обеспечивает возможность безопасного десантирования экипажа вместе с АСПА, что расширяет эксплуатационные возможности СПА.
Спасательный отсек 5 снабжен также, как минимум, одним складным креслом-кроватью 17 для нетранспортабельного спасаемого, установленным с возможностью его раскрытия над камерой присоса 11 АСПА под входным люком 10 (фиг.3). В походном положении и при десантировании и после эвакуации нетранспортабельных спасаемых кресла-кровати 17 установлены в спасательном отсеке 5 в сложенном виде.
Наличие и расположение складных кресел-кроватей 17 обеспечивает расширение эксплуатационных возможностей, в частности, упрощает транспортировку и эвакуацию нетранспортабельных спасаемых, а также обеспечивает увеличение вместимости спасательного аппарата за счет использования свободного объема над камерой присоса 11 для размещения спасаемых.
АСПА включает цистерны главного балласта 18, креново-дифферентные и уравнительные цистерны 19, которые расположены в булевых наделках 20, установленных на прочном корпусе 1 побортно над центральной горизонтальной плоскостью прочного корпуса 1. Наличие булевых наделок 20 обеспечивает защиту указанных цистерн от ударных нагрузок при приводнении. Булевые наделки 20 устанавливают симметрично диаметральной плоскости АСПА.
Как минимум, одна аккумуляторная батарея 21 размещена в нижней части прочного корпуса 1, как минимум, в одном прочном забортном цилиндрическом контейнере 22, установленном с возможностью его сброса для срочного всплытия. Прочные контейнеры 22 обеспечивают защиту аккумуляторных батарей от ударных нагрузок при десантировании, удары об лед и также выдерживают давление воды вплоть до предельной глубина погружения спасательного аппарата. Два или четыре прочных цилиндрических контейнера 22 установлены побортно и симметрично диаметральной плоскости АСПА под булевыми наделками 20. В экстренных ситуациях контейнер 22 с аккумуляторной батареей 21 используют в качестве отделяемого твердого балласта.
Для передвижения под водой АСПА включает также носовое 23 и кормовое 24 горизонтальные подруливающие устройства, вертикальные подруливающие устройства 25 и как минимум, один маршевый гребной электродвигатель 26. Маршевый движитель 26 обеспечивает горизонтальное перемещение АСПА.
Носовое горизонтальное подруливающее устройство 23 размещено в прочном стальном кожухе 27 в верхней части носовой прочной переборки 2. Четыре вертикальных подруливающих устройства 25 расположены в булевых наделках 20 побортно.
За кормовой прочной переборкой 3 прочного корпуса 1 кормовым обтекателем 28 легкого корпуса образована кормовая оконечность 29, в которой установлены кормовое горизонтальное подруливающее устройство 24 и, как минимум, один вертикально закрепленный маршевый гребной электродвигатель 26 с возможностью его поворота на 90° в горизонтальное рабочее положение вне обводов прочного корпуса 1 (Фиг. 1, а).
Установка гребного электродвигателя 26 с возможностью поворота из вертикального походного положения при десантировании в горизонтальное рабочее положение вне обводов прочного корпуса 1 АСПА после приводнения расширяет эксплуатационные возможности АСПА. Вертикальное походное положение гребного электродвигателя 26 в пределах кормовой оконечности 29 при десантировании обеспечивает защиту маршевого движителя от ударных нагрузок при десантировании. Горизонтальное рабочее положение вне обводов прочного корпуса 1 после приводнения обеспечивает горизонтальное движение АСПА под водой после приводнения (Фиг. 6). Размещение гребного электродвигателя 26, горизонтальных и вертикальных подруливающих устройств 23, 24, 25 внутри корпусных конструкций или защитных кожухов обеспечивает их защиту от ударных нагрузок, возникающих при десантировании АСПА от столкновений с водой или битым или плавающим льдом, что обеспечивает возможность десантирования.
Таким образом, все жизненно важные устройства АСПА защищены прочными корпусными конструкциями, в том числе подруливающие устройства 23, 24, 25 и маршевый гребной электродвигатель 26, что обеспечивает возможность десантирования и расширяет эксплуатационные возможности.
Авиадесантируемый спасательный подводный аппарат выполнен с центром тяжести, расположенным в диаметральной плоскости и смещенным к носовой переборке 2 на расстояние не более трех метров от крайней точки кормовой оконечности 29 (не показано). Конструктивно полученное смещенное положение центра тяжести АСПА по его длине обеспечивает безопасное расхождение АСПА в воздухе с конструкцией самолета в момент выхода из фюзеляжа при десантировании и возможность десантирования с авиатехники, что расширяет эксплуатационные возможности АСПА.
Конструкция АСПА обеспечивает возможность транспортировки подводного аппарата на самолетах транспортной авиации и возможность десантирования АСПА, что расширяет эксплуатационные возможности АСПА. При этом АСПА обеспечивает требуемые показатели прочности, маневренности, автономности и жизнеобеспечения экипажа и спасаемых.
Входной люк 10 АСПА снабжен съемными поворотными створками, установленными на прочном корпусе 1 с возможностью их поворота в вертикальное положение в надводном положении с образованием сборного кожуха или их сброса с пульта управления в командном отсеке 4 (не показано). Сборный кожух, образованный поднятыми вертикальными поворотными створками, обеспечивает защиту открытого входного люка 10 АСПА от заливания водой в надводном положении после всплытия, что повышает безопасность дальнейшей эвакуации спасаемых. В походном положении АСПА поворотные створки закреплены на его прочном корпусе 1.
В носовой части прочного корпуса 1 АСПА установлен манипулятор 30. Для уменьшения ударных нагрузок в момент приводнения манипулятор 30 компактно сложен, а подвижные элементы дополнительно прижаты к корпусу АСПА подвижными упорами или замками, дистанционно управляемыми с пульта управления в командном отсеке 4.
Пример исполнения. АСПА выполнен со следующими габаритными размерами, обеспечивающими его транспортируемость авиатехникой: длина не более 8600 мм, ширина не более 3400 мм, высота не более 3000 мм, а его десантируемая сухая масса не более 20 т. Для транспортировки и десантирования АСАП указанных размеров возможно использование самолета типа Ил-76 основного самолета военно-транспортной авиации Российской Федерации.
В теплоизолированном цилиндрическом прочном корпусе 1 носовая переборка 2 выполнена торосферической формы, девять иллюминаторов 15 для обзора оператора АСПА выполнены из прочного стекла. В командном отсеке 2 установлены также радиоэлектронное вооружение, оборудование электроэнергетической системы, оборудование системы вентиляции и кондиционирования.
Система горизонтальной амортизации кресла оператора 9 в командном отсеке 4 выполнена в виде амортизатора и горизонтальных направляющих рельсов, установленных на палубе командного отсека 4 (не показано). Амортизатор прикреплен одной частью к основанию кресла 9, а другой стороной закреплен к палубе командного отсека 4, а кресло оператора 9 выполнено с возможностью его перемещения по направляющим рельсам вдоль командного отсека 4. Амортизатор в командном отсеке 4 может быть выполнен пневматическим или гидравлическим.
Складное кресло 16 оператора для десантирования в спасательном отсеке 5 выполнено, например, из трех секций бакелизированной фанеры толщиной 8-10 мм, скрепленных между собой с помощью петлевого соединения. Амортизатор кресла 16 в спасательном отсеке 5 выполнен из съемных секций листов поролона толщиной 100-150 мм.
В спасательном отсеке 5 сидячие места для размещения спасаемых расположены побортно вдоль прочного корпуса 1 (фиг.1, 6 и г). Балластные цистерны 4 для замещения массы спасаемых и грузов, оборудование системы вентиляции и кондиционирования воздуха расположены под сиденьями 31 спасаемых. В агрегатном отсеке 6 установлено оборудование электроэнергетической и общекорабельных систем, системы вентиляции и кондиционирования, которые не требуют постоянного обслуживания и наблюдения.
В кормовой оконечности 29 вне прочного корпуса размещены маршевый гребной электродвигатель 26 в походном вертикальном положении, например, на поворотной платформе с приводом разворота на 90° в вертикальной плоскости, а также баллоны с воздухом высокого давления 32, баллоны с медицинским кислородом и другое оборудование.
Съемные замки крепления парашютных строп и многокупольная парашютная система 14 размещены сверху прочного корпуса АСПА вдоль диаметральной плоскости. Съемные замки крепления парашютных строп выполнены механическими с электроприводом и дополнительно снабжены аварийными пироболтами, выполненными с возможностью их дистанционного управления с пульта управления в командном отсеке 4 (не показано). На АСПА установлены литий-ионные аккумуляторы 21.
Устройство работает следующим образом. Для транспортировки АСПА к месту аварии подводной лодки используют авиатранспорт, например, реактивные транспортные самолеты. Для десантирования АСПА с транспортного самолета используют, в основном, тормозной-вытяжной парашют 13 или многокупольную парашютную систему 14 (фиг.4 и 5).
Десантирование АСПА в воздушном пространстве с помощью тормозного-вытяжного парашюта 13 осуществляют со сверхмалых высот на водной поверхности, свободной от битого или плавучего льда. При этом при скорости АСПА 230-250 км/час при приводнении возникают сильные ударные нагрузки на операторов, прочный корпус 1 и оборудование.
Десантирование с помощью многокупольной парашютной системы 14 используют при наличии битого льда или ледяного покрова. При этом при относительно небольшой вертикальной скорости снижения АСПА при ударе о лед возникают невысокие ударные нагрузки на операторов, прочный корпус 1 и оборудование. Использование многокупольной парашютной системы обеспечивают безопасные вертикальные скорости снижения АСПА и безопасность при столкновении с плавающим или битым льдом, или сплошным ледовым покровом.
АСПА с носовой переборкой 2 торосферической формы в сочетании с усеченным конусом используют при любых средствах десантирования. АСПА с носовой переборкой торосферической формы используют, предпочтительнее, при десантировании с помощью многокупольной парашютной системы 14. АСПА, имеющий смещенный в диаметральной плоскости центр тяжести, десантируют из самолета с безопасным расхождением с самолетом в воздухе.
АСПА десантируют с экипажем из двух человек. Один оператор находится внутри командного отсека 4 в амортизированном кресле-оператора 9, другой - в спасательном отсеке 5, в складном кресле 16 у камеры присоса 11, и пристегнуты ремнями безопасности (фиг.2). В момент десантирования и приводнения операторы расположены в креслах, которые развернуты против движения и наклонены назад, и в момент входа в воду операторов прижимает к спинке кресел 9 и 16.
После приводнения АСПА оператор командного отсека 4 переводит кресло 9 в рабочее положение, производит раскрытие замков крепления строп тормозного-вытяжного парашюта 13 или много купольной парашютной системы 14 для освобождения от них. В случае заклинивания этих замков, срабатывают аварийные пироболты, также дистанционно управляемые с пульта управления в командном отсеке 4. Затем оператор поворачивает маршевый двигатель 26 в вертикальной плоскости из походного вертикального положения в рабочее горизонтальное положение, проводится проверка работоспособности всех систем СПА и заполнение балластных цистерн 12 и 18 забортной водой и АСПА готовится к погружению (фиг.6).
Таким образом, транспортировка, десантирование и погружение АСПА осуществляется с минимальными подготовительными операциями, что уменьшает время спасательной операции и упрощает ее проведение.
По окончании проверок всех систем АСПА производят его погружение, маневрирование и сближение АСПА с аварийной подводной лодкой по уже отработанным методикам. После погружения, сближения и контакта с подводной лодкой АСПА осуществляет стыковку камеры присоса 11 АСПА с комингс-площадкой аварийной подводной лодки. После посадки АСПА на одну из комингс-площадок аварийной подводной лодки производят откачку воды из камеры присоса 11 АСПА, выравнивание давления в спасательном отсеке 5 с давлением в аварийной подводной лодке и открытие люков на комингс-площадке подводной лодки и в камере присоса 11. В спасательном отсеке 5 размещают 16 человек спасаемых, в том числе 14 человек на сиденьях 31 побортно по 7 человек, и 2 человека в полулежачем положении на складных креслах-кроватях 17 над камерой присоса 11 под входным люком 10. Происходит прием первой группы спасаемых, закрытие люков камеры присоса 11 и комингс-площадки подводной лодки, заполнение камеры присоса 11 забортной водой и после этого АСПА отделяется от аварийной подводной лодки и осуществляет всплытие.
После принятия штатного количества спасаемых подводников АСПА транспортирует их на подошедшее в район аварии судно-спасатель или проводится декомпрессия подводников непосредственно в АСПА. После перевода подводников на судно-спасатель и пополнения, в случае необходимости, запасов электроэнергии, сжатого воздуха и средств регенерации АСПА проводит повторное погружение.
Таким образом, изобретение расширяет эксплуатационные возможности АСПА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНАЯ АВИАДЕСАНТИРУЕМАЯ СИСТЕМА | 2019 |
|
RU2707860C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| ПОДВОДНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС С ВЛОЖЕННЫМИ МНОГОФУНКЦИОНАЛЬНЫМИ КАПСУЛАМИ | 2012 |
|
RU2474511C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| СПАСАТЕЛЬНЫЙ ОТСЕК ПОДВОДНОЙ ЛОДКИ | 2022 |
|
RU2787696C1 |
| Маневрирующий спасательный колокол | 2022 |
|
RU2783319C1 |
| Спасательная подводная лодка - носитель глубоководных аппаратов | 2016 |
|
RU2690327C2 |
| Спасательный подводный аппарат | 2021 |
|
RU2761043C1 |
| ПОДВОДНЫЙ СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2008 |
|
RU2360828C1 |
Изобретение относится к области подводного кораблестроения, в частности к спасательным подводным аппаратам, предназначенным преимущественно для спасения экипажей аварийных подводных лодок, лежащих на грунте и доставляемых к месту аварии на транспортных самолетах и десантируемых с них. Авиадесантируемый спасательный подводный аппарат включает цилиндрический прочный корпус с концевыми носовой и кормовой прочными переборками, внутри которого установлены переборки с переходными люками с образованием командного отсека с прочной разделительной переборкой. Носовая переборка прочного корпуса выполнена торосферической формы или торосферической формы в сочетании с усеченным конусом и снабжена иллюминаторами. Прочный корпус снабжен замками крепления парашютных строп, выполненными с возможностью их дистанционного раскрытия с пульта управления в командном отсеке. Цистерны главного балласта, креново-дифферентные цистерны, уравнительные цистерны, четыре вертикальных подруливающих устройства расположены в булевых наделках, установленных на прочном корпусе побортно над центральной горизонтальной плоскостью прочного корпуса, за кормовой прочной переборкой которого кормовым обтекателем легкого корпуса образована кормовая оконечность, в которой установлены кормовое горизонтальное подруливающее устройство и, как минимум, один вертикально закрепленный маршевый гребной электродвигатель с возможностью его поворота на 90° в горизонтальное рабочее положение вне обводов прочного корпуса. Авиадесантируемый спасательный подводный аппарат выполнен с центром тяжести, расположенным в диаметральной плоскости и смещенным к носовой переборке на расстояние не более трех метров от крайней точки кормовой оконечности. Достигается расширение эксплуатационных возможностей. 9 з.п. ф-лы, 7 ил.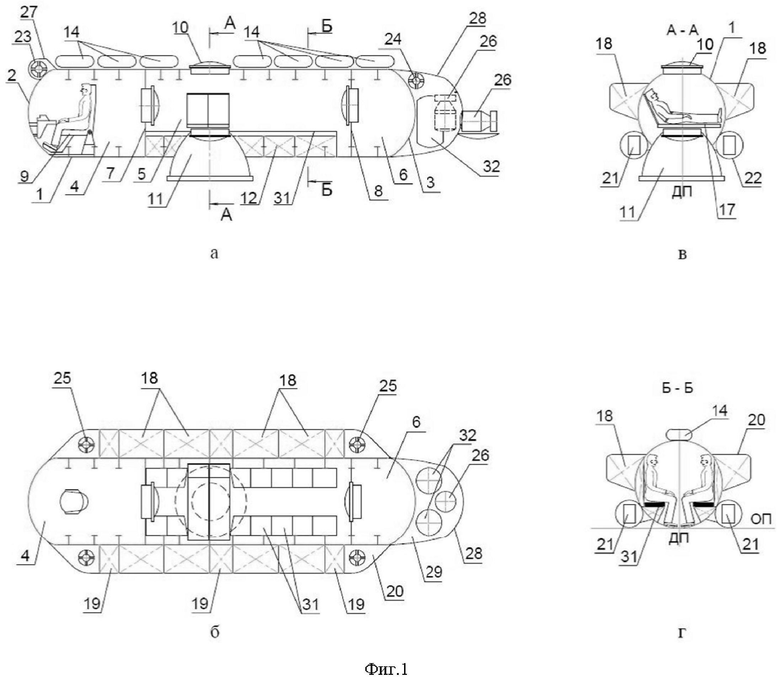
1. Авиадесантируемый спасательный подводный аппарат, включающий цилиндрический прочный корпус с концевыми носовой и кормовой прочными переборками, внутри которого установлены переборки с переходными люками с образованием командного отсека с прочной разделительной переборкой, пультом управления и креслом оператора, спасательного отсека с входным люком, камерой присоса и балластными цистернами для замещения массы спасаемых и грузов и агрегатного отсека, носовое подруливающее устройство, балластные, креново-дифферентные и уравнительные цистерны, вертикальные и горизонтальные подруливающие устройства, как минимум, один маршевый гребной электродвигатель, как минимум, одну аккумуляторную батарею, размещенную в нижней части прочного корпуса, как минимум, в одном прочном забортном цилиндрическом контейнере, установленном с возможностью его сброса для срочного всплытия, отличающийся тем, что носовая переборка прочного корпуса выполнена торосферической формы или торосферической формы в сочетании с усеченным конусом и снабжена иллюминаторами, которые выполнены диаметром 150-400 мм и распределены по поверхности носовой прочной переборки и прочного корпуса, который снабжен замками крепления парашютных строп, выполненными с возможностью их дистанционного раскрытия с пульта управления в командном отсеке, в котором кресло оператора выполнено с возможностью поворота вокруг вертикальной оси на 180° и вокруг горизонтальной оси для наклона и снабжено системой горизонтальной амортизации, а цистерны главного балласта, креново-дифферентные цистерны, уравнительные цистерны, четыре вертикальных подруливающих устройства расположены в булевых наделках, установленных на прочном корпусе побортно над центральной горизонтальной плоскостью прочного корпуса, за кормовой прочной переборкой которого кормовым обтекателем легкого корпуса образована кормовая оконечность, в которой установлены кормовое горизонтальное подруливающее устройство и, как минимум, один вертикально закрепленный маршевый гребной электродвигатель с возможностью его поворота на 90° в горизонтальное рабочее положение вне обводов прочного корпуса, при этом авиадесантируемый спасательный подводный аппарат выполнен с центром тяжести, расположенным в диаметральной плоскости и смещенным к носовой переборке на расстояние не более трех метров от крайней точки кормовой оконечности.
2. Аппарат по п.1, отличающийся тем, что он выполнен со следующими габаритными размерами: длина не более 8600 мм, ширина не более 3400 мм, высота не более 3000 мм, а его десантируемая сухая масса не более 20 т.
3. Аппарат по п.1, отличающийся тем, что система амортизации кресла оператора выполнена в виде амортизатора и горизонтальных направляющих рельсов, установленных на палубе командного отсека, при этом амортизатор прикреплен одной частью к основанию кресла, а другой стороной закреплен к палубе командного отсека, а кресло оператора выполнено с возможностью его перемещения по направляющим рельсам вдоль командного отсека.
4. Аппарат по п.1, отличающийся тем, что съемные замки крепления парашютных строп установлены с возможностью десантирования авиадесантируемого спасательного подводного аппарата в воздушном пространстве с помощью тормозного-вытяжного парашюта с ориентацией под углом 12-15° к горизонту.
5. Аппарат по п.1, отличающийся тем, что съемные замки крепления парашютных строп установлены сверху прочного корпуса вдоль диаметральной плоскости с возможностью десантирования авиадесантируемого спасательного подводного аппарата в воздушном пространстве с помощью многокупольной парашютной системы с ориентацией его под углом 25-35° к горизонту.
6. Аппарат по п.4 и 5, отличающийся тем, что съемные замки крепления парашютных строп выполнены механическими с электроприводом и дополнительно снабжены аварийными пироболтами, выполненными с возможностью их дистанционного управления с пульта управления в командном отсеке.
7. Аппарат по п.1, отличающийся тем, что входной люк снабжен съемными поворотными створками, установленными на прочном корпусе с возможностью их поворота в вертикальное положение в надводном положении с образованием сборного кожуха или их сброса с пульта управления в командном отсеке.
8. Аппарат по п.1, отличающийся тем, что спасательный отсек снабжен, как минимум, одним складным креслом оператора с амортизатором для защиты оператора от ударных нагрузок и, как минимум, одним складным креслом-кроватью для нетранспортабельного спасаемого, установленным с возможностью его раскрытия над камерой присоса под входным люком.
9. Аппарат по п.1, отличающийся тем, что переборка агрегатного отсека выполнена легкой, а баллоны со сжатым воздухом и медицинским кислородом установлены в кормовой оконечности вне прочного корпуса
10. Аппарат по п.1, отличающийся тем, что в носовой части прочного корпуса установлен компактно сложенный манипулятор, подвижные элементы которого дополнительно прижаты к прочному корпусу подвижными упорами или замками, дистанционно управляемыми с пульта управления в командном отсеке.
| СПАСАТЕЛЬНАЯ АВИАДЕСАНТИРУЕМАЯ СИСТЕМА | 2019 |
|
RU2707860C1 |
| US 1752063 A1, 25.03.1930 | |||
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ МОРСКИХ РАЙОНОВ ОТ ПЛАВАЮЩИХ ПОДВОДНЫХ ОБЪЕКТОВ | 2020 |
|
RU2753658C1 |
| CN 106394837 A, 15.02.2017. | |||

