Изобретение относится к измерительной технике и может быть использовано для определения объема сыпучего материала при его транспортировке конвейером снегоочистительной техники.
Известен способ определения объема транспортируемого конвейером сыпучего материала (см. патент №1527499 от 07.12.89 г), в котором поверхность сыпучего материала освещают узким плоским пучком света так, что на поверхности сыпучего материала образуется полоса света, ориентированная поперек движения конвейерной ленты. Над конвейерной лентой вдоль направления ее движения под некоторым углом к горизонтальной плоскости устанавливают передающую телевизионную камеру, с помощью которой получают телевизионный сигнал изображения узкой освещенной полосы, обработка которого позволяет получить информацию об объеме оттранспортированного за известное время сыпучего материала.
Недостатком способа является техническая сложность реализации, а также зависимость точности определения объема от светоотражающих свойств контролируемого сыпучего материала и степени освещенности его поверхности внешними источниками.
Наиболее близким по совокупности признаков является способ определения объема транспортируемого конвейером сыпучего материала (см. патент RU №2648972 С1 от 28.03.2018), включающий освещение поверхности сыпучего материала направленным излучением, регистрацию отраженного излучения с последующей обработкой полученного сигнала, по которому определяют объем транспортируемого сыпучего материала, освещение поверхности сыпучего материала осуществляют направленным электромагнитным излучением, регистрацию отраженного электромагнитного излучения осуществляют с помощью n пар источников и приемников ультразвуковых волн, установленных параллельно конвейерной ленте, определяют разность времен регистрации отраженных от сыпучего материала ультразвуковых волн, площадь поперечного сечения сыпучего материала определяют, интегрируя аппроксимированные значения высоты слоя сыпучего материала в каждый момент времени, при этом высоту слоя сыпучего материала определяют по формуле:
 где
где
hД - расстояние между источниками ультразвуковых волн и поверхностью конвейерной ленты, м;
νв - скорость распространения ультразвуковой волны в воздухе, м/с;
Δti - разность времен регистрации отраженных от сыпучего материала ультразвуковых волн, с;
i - номер источника ультразвуковых волн.
Недостатком способа является низкая точность определения объема некоторых сыпучих материалов, в частности, свежевыпавшего неутрамбованного снега, за счет значительного поглощения его поверхностью излучаемых ультразвуковых волн, а также зависимость полученных результатов от температуры окружающей среды.
Разработанный способ направлен на решение актуальной задачи повышения точности определения объема сыпучего материала, проходящего через конвейерную ленту, для оценки производительности снегоочистительной техники.
Поставленная задача решается за счет того, что в способе определения объема транспортируемого конвейером сыпучего материала, включающем освещение поверхности сыпучего материала направленным излучением, регистрацию отраженного излучения с последующей обработкой полученного сигнала, по которому определяют объем транспортируемого сыпучего материала, определяют разность времен регистрации отраженных от сыпучего материала волн, площадь поперечного сечения сыпучего материала определяют, интегрируя аппроксимированные значения высоты слоя сыпучего материала в каждый момент времени, освещение поверхности осуществляют направленным лазерным излучением под углом α к нормали к поверхности конвейерной ленты, для освещения используют один источник и один приемник, изменяют угол α путем поворота лазерного источника и приемника с помощью шагового двигателя, подключенного к микропроцессорному устройству, и определяют высоту слоя сыпучего материала в каждой точке поверхности сыпучего материала по формуле:
 где
где
hД - расстояние между источником лазерного излучения и поверхностью конвейерной ленты, м;
с - скорость света, м/с;
Δti - разность времен между излучением и отражением лазерного излучения от поверхности сыпучего материала, с;
i - номер точки на поверхности сыпучего материала, в которой определяется высота сыпучего материала;
α - угол между нормалью к поверхности конвейерной ленты и направлением лазерного излучения, рад.
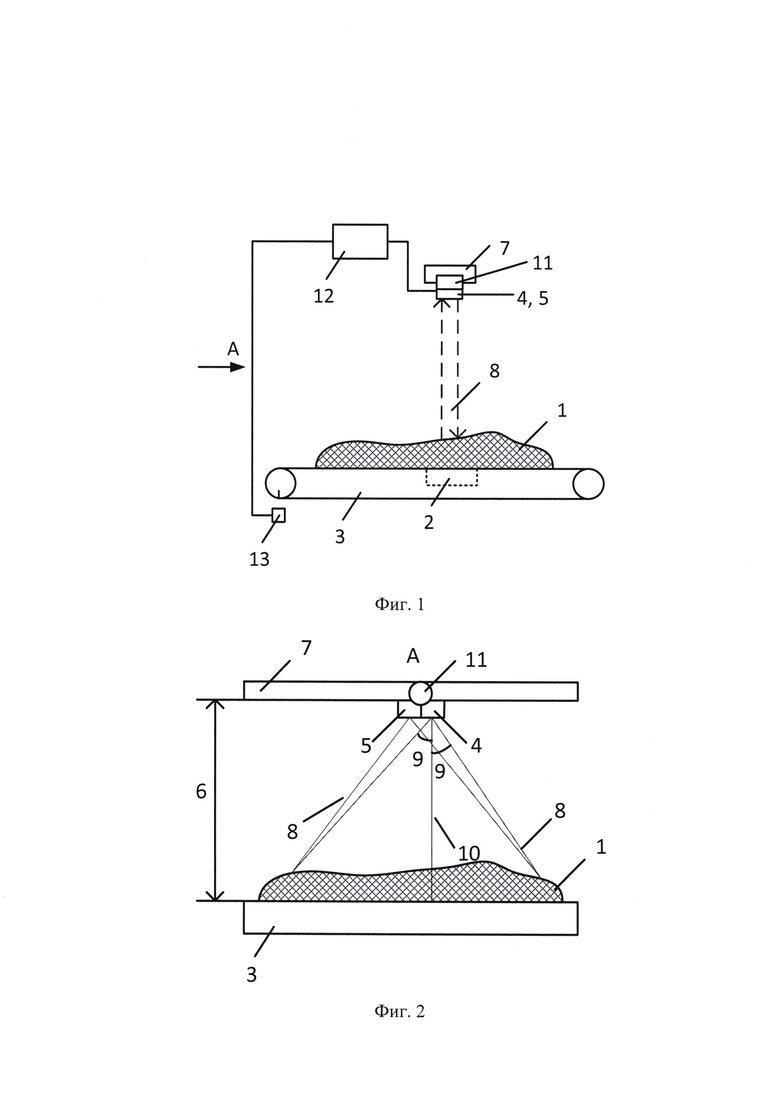
Способ иллюстрируется чертежом, где на фиг.1 представлена схема определения объема транспортируемого конвейерной лентой сыпучего материала при очистке железнодорожных путей, на фиг.2 - вид по стрелке А. 1 - сыпучий материал; 2 - контрольная область конвейерной ленты; 3 - конвейерная лента; 4 - источник лазерного излучения; 5 - приемник лазерного излучения; 6 - расстояние между источником и приемником ультразвуковых колебаний и поверхностью контрольной области конвейерной ленты; 7 - плоскость крепления источника и приемника лазерного излучения; 8 -направление лазерного излучения; 9 - угол направления лазерного излучения; 10 - нормаль от источника лазерного излучения к поверхности конвейерной ленты; 11 - шаговый двигатель; 12 - микропроцессорное устройство; 13 - датчик частоты вращения конвейера.
Предложенный способ реализуется следующим образом.
Для определения объема транспортируемого конвейерной лентой сыпучего материала 1, прошедшего через контролируемую область 2 конвейерной ленты 3, источник 4 и приемник 5 лазерного излучения стационарно устанавливают на расстоянии 6 от поверхности контролируемой области конвейерной ленты на параллельной поверхности конвейерной ленты прямой 7. Источник лазерного излучения генерирует волну 8, направленную под углом α 9 по нормали 10 к поверхности конвейерной ленты. В каждый момент времени изменяется угол поворота лазерного источника с помощью шагового двигателя 11, подключенного к микропроцессорному устройству 12. Средствами микропроцессорного устройства определяют разности времен Δti, с, между генерацией лазерной волны источником и регистрацией отраженной от поверхности транспортируемого конвейерной лентой сыпучего материала в точке xi приемником. Определяют высоту слоя транспортируемого конвейерной лентой сыпучего материала в точке xi над поверхностью конвейерной ленты по формуле hi = hД - 0,5 cos αi Δtic, м, где hД - расстояние между источниками лазерного излучения и поверхностью конвейерной ленты, м, α - угол между направлением излучения и нормалью к поверхности конвейерной ленты, рад., с - скорость света, м/с. Изменение значений угла а осуществляют до тех пор, пока не проведут измерения в каждой точке xi поверхности сыпучего материала. После этого определяют площадь поперечного сечения слоя транспортируемого конвейерной лентой сыпучего материала в момент времени t, с, по формуле  м3, где ƒ(i) - функция, полученная аппроксимацией значений hi, высоты слоя транспортируемого конвейерной лентой сыпучего материала. Определяют скорость движения конвейерной ленты ν, м/с, по данным датчика частоты вращения вала 13 конвейерной ленты. Количество т измерений площади поперечного сечения слоя транспортируемого конвейерной лентой сыпучего материала определяют по формуле m = tT/tИ, где tT - время измерения объема транспортируемого конвейерной лентой сыпучего материала, с, tИ - длительность одного измерения, с. Объем транспортируемого конвейерной лентой сыпучего материала определяют по формуле
м3, где ƒ(i) - функция, полученная аппроксимацией значений hi, высоты слоя транспортируемого конвейерной лентой сыпучего материала. Определяют скорость движения конвейерной ленты ν, м/с, по данным датчика частоты вращения вала 13 конвейерной ленты. Количество т измерений площади поперечного сечения слоя транспортируемого конвейерной лентой сыпучего материала определяют по формуле m = tT/tИ, где tT - время измерения объема транспортируемого конвейерной лентой сыпучего материала, с, tИ - длительность одного измерения, с. Объем транспортируемого конвейерной лентой сыпучего материала определяют по формуле  м3. Полученные значения объема транспортируемого конвейерной лентой сыпучего материала сохраняются в памяти микропроцессорного устройства.
м3. Полученные значения объема транспортируемого конвейерной лентой сыпучего материала сохраняются в памяти микропроцессорного устройства.
Предложенный способ был опробован на базе снегоуборочного поезда типа «СМ2 Б», прикрепленного к участку станции «Новосибирск-Восточный» Западно-Сибирской железной дороги в моменты выезда на пути необщего пользования для уборки снежных масс. На предусмотренной конструкцией самоходного поезда металлической перекладине, расположенной над контролируемой областью конвейерной ленты, был установлен оптический датчик расстояний 3irobotix Delta2B, представляющий собой источник и приемник лазерного излучения в общем корпусе с возможностью автоматизированного поворота на 360°. Определение разности времен между генерацией и регистрацией отраженного от поверхности снежной массы в контролируемой области конвейерной ленты лазерного излучения осуществлялся специализированным программным обеспечением на базе микропроцессорного устройства семейства AtMega. Поворот источника и приемника лазерного излучения осуществлялся с использованием шагового двигателя ШЭП-421Р65, подключенного к микропроцессорному устройству со специализированным программным обеспечением, который обеспечивал дискретность угла поворота 1° и скорость 10 оборотов в секунду. Излучение лазерного излучения производилось 30 раз в секунду. Площадь поперечного сечения слоя снежной массы определялась из результатов аппроксимации полученных значений высоты слоя снежной массы методом наименьших квадратов. Скорость движения конвейерной ленты определялась с помощью магнитного датчика частоты вращения вала и составляла 1 м/с. В течение одного рейса снегоуборочного поезда, включающего 23 минуты работы в режиме уборки, суммарный объем снежной массы, прошедшей через контролируемую область конвейерной ленты, составил 170 м3. Полученные данные были подтверждены инструментальными и визуальными измерениями.
Преимущество предлагаемого способа по сравнению с прототипом заключается в уменьшении количества источников и приемников излучения, повышении точности измерений за счет уменьшения доли поглощенного излучения поверхностью сыпучего материала и определения высоты в каждой точке поверхности сыпучего материала, а также в отсутствии влияния температуры окружающего воздуха на точность измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения объема транспортируемого конвейерной лентой сыпучего материала | 2016 |
|
RU2648972C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МИКРОРЕЛЬЕФА ПОВЕРХНОСТИ ИНТЕРФЕРЕНЦИОННЫМ МЕТОДОМ | 2007 |
|
RU2373494C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ КОСТЕЙ В МЯСЕ | 2015 |
|
RU2705389C2 |
| Ультразвуковой способ измерения скорости течения и расхода воды в открытых водоемах | 2016 |
|
RU2664456C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ОТДЕЛЬНЫХ ОБЪЕКТОВ ИЗ СЫПУЧИХ МАТЕРИАЛОВ | 2011 |
|
RU2526103C1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ДЛИНЫ ВОЛНЫ УЗКОПОЛОСНОГО СВЕТОВОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2390738C2 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| УНИВЕРСАЛЬНАЯ СВЕРХВЫСОКОЧАСТОТНАЯ СУШИЛЬНАЯ УСТАНОВКА (ВАРИАНТЫ) | 1995 |
|
RU2111631C1 |
| Приемник ИК- и ТГц-излучений | 2017 |
|
RU2650430C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2011 |
|
RU2453996C1 |
Изобретение относится к измерительной технике и может быть использовано для определения объема сыпучего материала. Способ заключается в освещении поверхности сыпучего материала направленным излучением, регистрации отраженного излучения с последующей обработкой полученного сигнала, по которому определяют объем транспортируемого сыпучего материала, определяют разность времен регистрации отраженных от сыпучего материала волн, площадь поперечного сечения сыпучего материала определяют, интегрируя аппроксимированные значения высоты слоя сыпучего материала в каждый момент времени, причем освещение поверхности осуществляют направленным лазерным излучением под углом α по нормали к поверхности конвейерной ленты, изменяют угол α путем поворота лазерного источника и приемника с помощью шагового двигателя, подключенного к микропроцессорному устройству, и определяют высоту слоя сыпучего материала в каждой точке поверхности сыпучего материала по формуле: hi = hД - 0,5 cos αi Δtic, где hД - расстояние между источником лазерного излучения и поверхностью конвейерной ленты, м; с - скорость света, м/с; Δti - разность времен между излучением и отражением лазерного излучения, с; i - номер точки на поверхности сыпучего материала; α - угол между нормалью к поверхности конвейерной ленты и направлением лазерного излучения, рад. Технический результат - повышение точности определения объема сыпучего материала. 2 ил.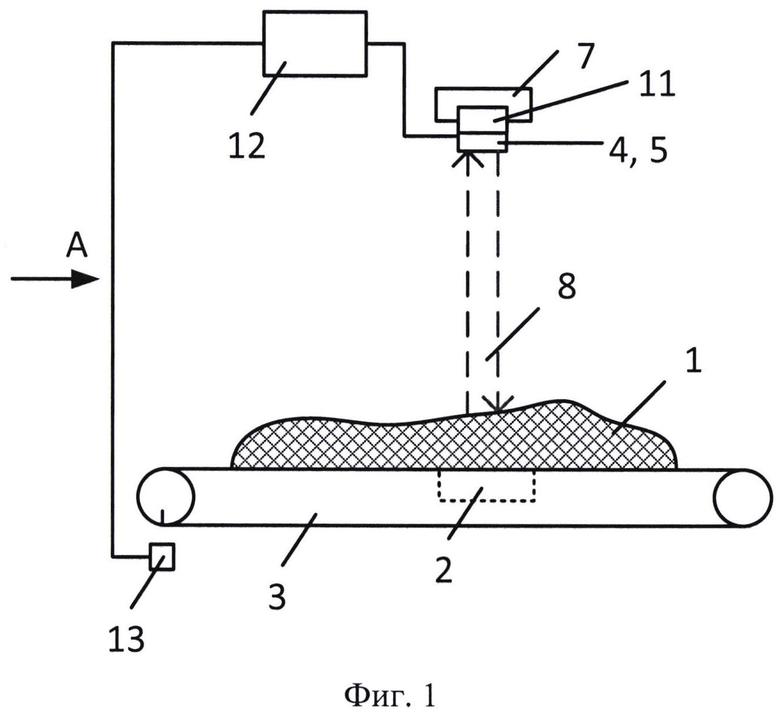
Способ определения объема транспортируемого конвейером сыпучего материала, включающий освещение поверхности сыпучего материала направленным излучением, регистрацию отраженного излучения с последующей обработкой полученного сигнала, по которому определяют объем транспортируемого сыпучего материала, определяют разность времен регистрации отраженных от сыпучего материала волн, площадь поперечного сечения сыпучего материала определяют, интегрируя аппроксимированные значения высоты слоя сыпучего материала в каждый момент времени, отличающийся тем, что освещение поверхности осуществляют направленным лазерным излучением под углом α по нормали к поверхности конвейерной ленты, для освещения используют один источник и один приемник, изменяют угол α путем поворота лазерного источника и приемника с помощью шагового двигателя, подключенного к микропроцессорному устройству, и определяют высоту слоя сыпучего материала в каждой точке поверхности сыпучего материала по формуле:
 где
где
hД - расстояние между источником лазерного излучения и поверхностью конвейерной ленты, м;
с - скорость света, м/с;
Δti - разность времен между излучением и отражением лазерного излучения от поверхности сыпучего материала, с;
i - номер точки на поверхности сыпучего материала, в которой определяется высота сыпучего материала;
α - угол между нормалью к поверхности конвейерной ленты и направлением лазерного излучения, рад.
| Способ определения объема транспортируемого конвейерной лентой сыпучего материала | 2016 |
|
RU2648972C1 |
| JP 10009906 A, 16.01.1998 | |||
| CN 108981842 A, 11.12.2018 | |||
| CN 203163842 U, 28.08.2013 | |||
| WO 2020151311 A1, 30.07.2020. | |||

