ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[01] По этой заявке испрашивается приоритет предварительной заявки № 62/727816 на патент США, поданной 6 сентября 2018 года, все содержание которой включено в эту заявку путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
[02] В общем, настоящее раскрытие относится к ретрографическим датчикам, а более конкретно, к контактным датчикам со специализированными поверхностями, которые облегчают использование в случаях различных поверхностей объектов.
УРОВЕНЬ ТЕХНИКИ
[03] Ретрографический датчик включает в себя подложку из прозрачного эластомера, покрытую деформируемым слоем, содержащим отражающие частицы, наряду с оптической системой для захвата изображений слоя, когда он искажается при прижатии к объекту. Чтобы датчик точно соответствовал топографически сложной поверхности объекта, деформируемый слой должен растягиваться, скользить и искажаться, чтобы согласоваться с поверхностью объекта. Если поверхность датчика имеет высокий коэффициент трения (КТ), что справедливо для большей части эластомеров, поверхность датчика не будет легко направляться на элементах поверхности объекта и скользить по ним, и не будет легко согласовываться с поверхностью объекта. Кроме того, из большей части эластомеров исключается выход захваченного воздуха. Например, когда эластомерный датчик вжимают в ямку, он образует уплотнение по ободку ямки, вследствие чего захваченный воздух остается в ямке. Захваченный воздух предотвращает достижение датчиком дна ямки и поэтому точное измерение исключается. Поэтому остается необходимость в усовершенствованных датчиках, в которых при формировании изображения исключаются дефекты, связанные с этими свойствами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[04] Ретрографический датчик включает в себя прозрачную эластомерную подложку, деформируемый отражающий слой и контактную поверхность с матрицей жестких неплоских элементов, образованных из материала, или со структурой частиц, для уменьшения сцепления с поверхностью объекта и в то же время для предоставления возможности захваченному воздуху выходить из представляющей интерес области. Это сочетание элементов позволяет иметь контактную поверхность датчика, более точно согласующуюся с поверхностью объекта, и в то же время позволяет физически передавать топографию поверхности объекта деформируемому слою для формирования изображения через подложку.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[05] Упомянутые выше и другие объекты, признаки и преимущества устройств, систем и способов, описанных в этой заявке, станут очевидными из нижеследующего описания конкретных вариантов осуществления его, показанных на сопровождающих чертежах. Чертежи необязательно выполнены в масштабе и приданы для иллюстрации принципов устройств, систем и способов, описанных в этой заявке. На чертежах:
[06] фиг. 1 - иллюстрация системы формирования изображения и ретрографического датчика;
[07] фиг. 2 - иллюстрация ретрографического датчика, расположенного для использования;
[08] фиг. 3 - иллюстрация ретрографического датчика, наложенного на поверхность объекта;
[09] фиг. 4 - иллюстрация контактной поверхности ретрографического датчика;
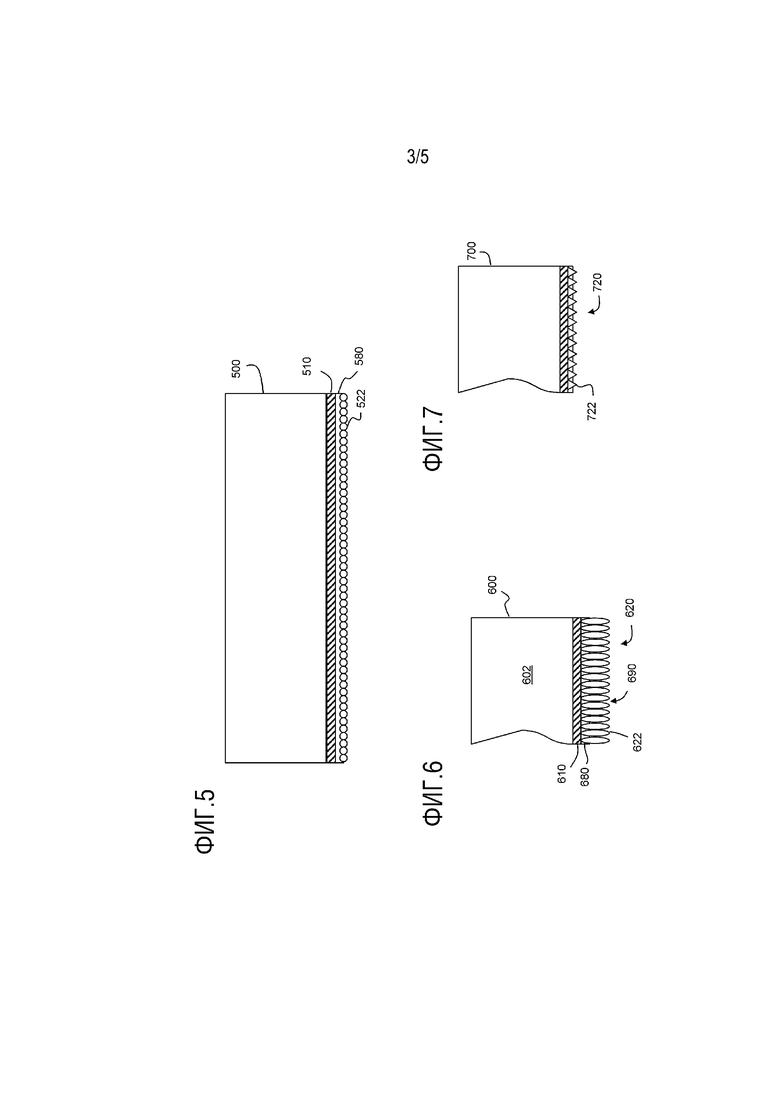
[10] фиг. 5 - вид сбоку ретрографического датчика;
[11] фиг. 6 - вид сбоку ретрографического датчика;
[12] фиг. 7 - вид сбоку ретрографического датчика;
[13] фиг. 8 - блок-схема последовательности действий способа изготовления ретрографического датчика;
[14] фиг. 9 - блок-схема последовательности действий способа метрологии поверхности с использованием ретрографического датчика;
[15] фиг. 10 - иллюстрация полученного оптическим микроскопом изображения матрицы 6-микрометровых микросфер первого типа;
[16] фиг. 11 - иллюстрация полученного оптическим микроскопом изображения матрицы 6-микрометровых микросфер второго типа; и
[17] фиг. 12 - средний радиальный спектр мощности для матриц микросфер из фиг. 10 и 11.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[18] Теперь варианты осуществления будут описаны с обращением к сопровождающим чертежам. Однако изложенное выше может быть осуществлено многими различными способами и не должно толковаться как ограниченное показанными вариантами осуществления, изложенными в этом разделе.
[19] Все документы, упомянутые в этой заявке, являются тем самым полностью включенными в нее путем ссылки. Ссылки на элементы в единственном числе следует понимать включающими элементы во множественном числе и наоборот, если иное явно не оговорено или ясно не следует из текста. Грамматические объединения предполагаются выражающими любые и все дизъюнктивные и конъюнктивные комбинации объединенных предложений, суждений, слов и т.п., если иное не оговорено или ясно не следует из контекста. Таким образом, термин «или» следует обычно понимать означающим «и/или» и т.д.
[20] В этой заявке изложение пределов значений не предполагается ограничивающим, а предполагается относящимся индивидуально к любому и всем значениям, попадающим в пределы, если в этой заявке не указано иное, а каждое отдельное значение в таких пределах включается в описание изобретения, как если бы оно было индивидуально приведено в этой заявке. Слова «около», «приблизительно» или подобные при численном значении специалисту в данной области техники следует понимать как показывающие отклонение, при котором обеспечивается удовлетворительная работа в предполагаемой области применения. Аналогично этому, слова, относящиеся к приближенному значению, такие как «приблизительно» или «по существу», при использовании относительно физических характеристик специалисту в данной области техники следует понимать как выражающие пределы отклонения, при которых обеспечивается удовлетворительная работа в случае соответствующего использования, функционирования, целевого назначения или чего-либо подобного. Пределы значений и/или числовых значений приводятся в этой заявке только для примера и не накладывают ограничений на объем описанных вариантов осуществления. Когда пределы значений приводятся, они предполагаются включающими каждое значение в пределах, как если бы оно было представлено индивидуально, однако если иное особо не оговорено. Использование любого или всех примеров, или вводного слова перед примером («например», «такой как» или подобного), приводимого в этой заявке, предназначено только для лучшего освещения вариантов осуществления и не является ограничением объема вариантов осуществления. Никакую формулировку в описании не следует толковать как показывающую какой-либо незаявленный элемент существенным при практическом применении вариантов осуществления.
[21] Следует понимать, что в нижеследующем описании термины, такие как «первый», «второй», «верх», «низ», «вверх», «вниз» и т.п., являются обычными словами и не должны толковаться как ограничивающие термины.
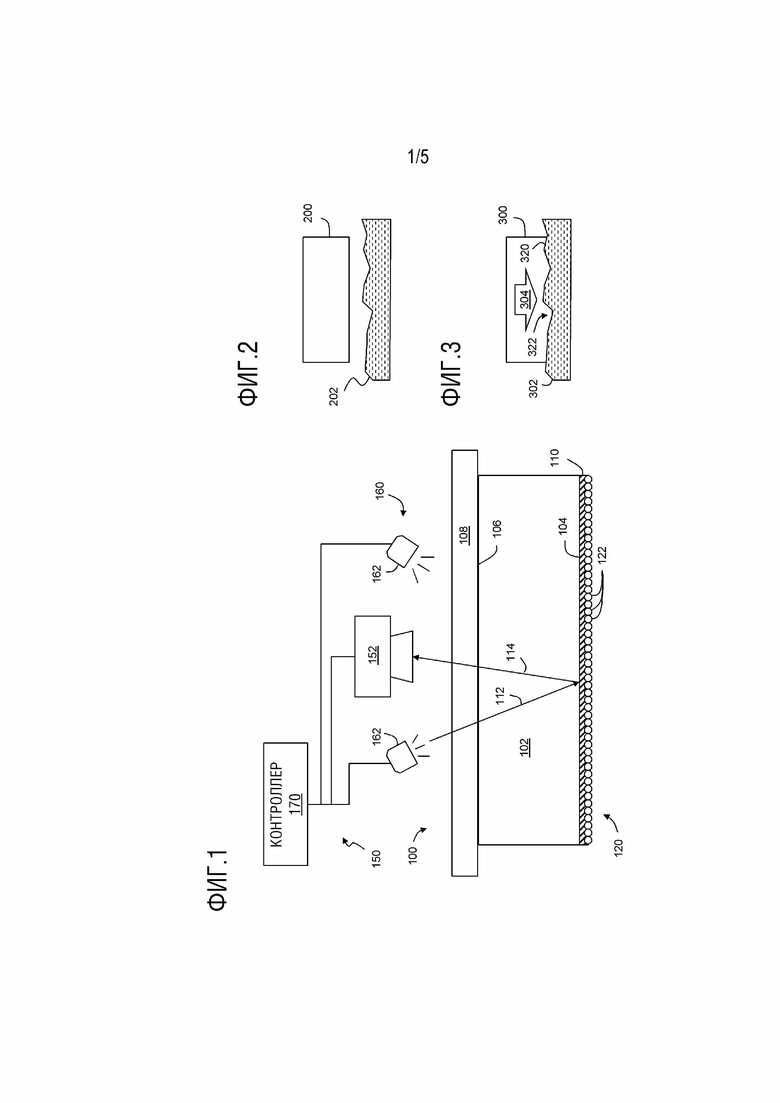
[22] На фиг. 1 показаны система формирования изображения и ретрографический датчик. В общем случае ретрографический датчик 100 можно использовать вместе с системой 150 формирования изображения, чтобы образовать контактную систему формирования изображения для количественных или качественных топографических измерений при метрологии поверхности или при других практических применениях системы формирования трехмерного изображения.
[23] Ретрографический датчик 100 может включать в себя подложку 102 с первой поверхностью 104, обращенной к поверхности (непоказанной) объекта, и второй поверхностью 106, обращенной к системе 150 формирования изображения. Вторая поверхность 106 может примыкать, например, к защитному покрытию 108 подложки 102, при этом защитное покрытие 108 образовано из жесткого, оптически прозрачного материала, такого как стекло, поликарбонат или акриловое соединение. Обычно защитное покрытие 108 пропускает свет к подложке 102 и принимает свет из нее для формирования изображения и в то же время обеспечивает приложение силы для сцепления ретрографического датчика 100 с поверхностью объекта способом, при котором обеспечивается формирование изображения топографии поверхности объекта с помощью ретрографического датчика 100.
[24] Подложка 102 может быть образована из любого оптически прозрачного деформируемого материала, удовлетворяющего требованиям прохождения света через него, для содействия формированию изображения и в то же время для согласования с поверхностью объекта, когда при использовании ретрографический датчик 100 помещают против поверхности объекта. Например, подложка 102 может быть образована из эластомера, способного пропускать изображение и имеющего твердость, подходящую для согласования с контактной поверхностью. Твердость эластомера по Шору А может быть меньше чем 40 или любой другой твердостью, подходящей для согласования с представляющими интерес материалами объекта. Например, эластомер подложки 102 может быть оптически прозрачным эластомером, таким как силиконовый каучук, полиуретан, пластизоль, натуральный каучук, полиизопрен и поливинилхлорид или любой другой термопластичный эластомер, или что-либо подобное. Согласно одному аспекту эластомер включает в себя стирольный блоксополимер, например около 20 мас.% стирольного блоксополимера и до 80 мас.% пластификатора или стирольный блоксополимер и пластификатор в соотношении 1:4. В более общем случае в такой ситуации целесообразно использовать полимер и пластификатор в соотношении от около 1:2 до около 1:9. Пластификатор может включать в себя масло и реагент, придающий клейкость, или любые другие подходящие добавки, или другие компоненты.
[25] Хотя первая поверхность 104 показана как по существу плоская, должно быть понятно, что другие формы могут быть также или взамен использованы. Например, первая поверхность 104 может быть выпуклой (от системы 150 формирования изображения), например для обеспечения большей степени свободы ориентации ручного датчика или чего-либо подобного.
[26] Кроме того, ретрографический датчик 100 может включать в себя деформируемый слой 110, который может быть расположен на первой поверхности 104 подложки 102. В общем случае деформируемый слой 110 может включать в себя материал или может быть образован из материала, который отражает свет, проходящий через подложку 102 и падающий на первую поверхность 104, показанный первой стрелкой 112, чтобы облегчить захват изображений из света, отраженного от первой поверхности 104, показанного второй стрелкой 114, для использования при обработке изображения, такой как построение двумерного или трехмерного изображения.
[27] Деформируемый слой 110 может быть образован из любого из ряда деформируемых материалов, таких как любой из эластомеров, описанных в этой заявке. Однако в отличие от подложки 102 деформируемый слой 110 необязательно должен быть оптически прозрачным и предпочтительно, чтобы отражение осуществлялось на его поверхности, обращенной к первой поверхности 104 подложки 102, чтобы облегчалось формирование изображения деформированного слоя ретрографического датчика 100 в течение использования. Например, деформируемый слой 110 может включать в себя отражающие частицы, такие как металлические частицы, расположенные во втором эластомере. Деформируемый слой 110 может также или взамен включать в себя неметаллические частицы, которые придают надлежащие поверхностные свойства деформируемому слою 110, когда он соприкасается с первой поверхностью 104 подложки 102. Например, деформируемый слой 110 может отражать свет ненаправленно или по существу равномерно, по всем направлениям для исключения смещений, которые могут в ином случае возникать при оценивании нормалей к поверхности или градиентов на основании интенсивности отраженного света.
[28] Согласно одному аспекту деформируемый слой 110 может включать в себя диоксид титана. Деформируемый слой 110 может также включать в себя углеродную сажу, например, в количестве, достаточном для придания нейтрального серого цвета диоксиду титана в деформируемом слое 110. Согласно другому аспекту деформируемый слой 110 может включать в себя красный оксид железа. Согласно еще одному аспекту материал деформируемого слоя 110 может включать в себя хлопья, которые проявляют по меньшей мере одно свойство из шероховатости поверхности, нерегулярной формы и случайного выравнивания относительно друг друга, что является причиной умеренно направленного отражения света материалом, или материал деформируемого слоя 110 может включать в себя хлопья, которые являются по существу плоскими, имеют поверхность, подобную зеркальной поверхности, и по существу хорошо выровнены относительно друг друга, что является причиной высоконаправленного отражения света материалом. В этом последнем варианте осуществления хлопья целесообразно, чтобы хлопья включали в себя алюминиевые хлопья, бронзовые хлопья или любые другие подходящие металлические или иные хлопья.
[29] Кроме того, ретрографический датчик 100 может включать в себя контактную поверхность 120 для помещения в соприкосновение с изображаемым объектом. В общем случае контактная поверхность 120 может включать в себя частицы 122, расположенные в виде структуры на деформируемом слое 110 и отделенные от подложки 102 деформируемым слоем 110. Предпочтительно, чтобы частицы 122 имели твердость, которая больше, чем твердость первого эластомера в подложке 102, с тем, чтобы частицы 122 сохраняли форму, когда ретрографический датчик 100 прикладывают к поверхности объекта с силой, достаточной для деформирования подложки 102. Таким образом, матрица частиц 122 может создавать воздушные каналы для перераспределения и выхода воздуха или других захваченных газов, когда ретрографический датчик 100 прикладывают к поверхности объекта. Для поддержания строения воздушных каналов и в то же время минимизации влияния на разрешающую способность получаемого изображения полезно, чтобы структура была образована одним слоем частиц на деформируемом слое 110, например, как это показано на фиг. 1.
[30] Частицы могут иметь твердость по Шору А больше чем 40 или в более общем случае большую, чем соответствующая твердость эластомера подложки 102. Например, эластомер подложки 102 может иметь твердость по Шору А по меньшей мере 10, меньшую, чем твердость по Шору А частиц. Аналогично этому, твердость по Шору А деформируемого слоя 110 может быть меньше, чем твердость по Шору А частиц 122, и может быть больше или равна твердости по Шору А подложки 102. Следует понимать, что модуль упругости или подобные показатели описывают объемные свойства материалов и в некоторых случаях могут быть полезными для обнаружения отличия относительно гибких материалов, используемых для подложки 102 или деформируемого слоя 110, от относительно жестких материалов частиц 122, расположенных на деформируемом слое 110. Однако твердость, измеряемая, например, с использованием шкалы твердости по Шору А, описанной в этой заявке, может изменяться в соответствии с местом в пределах изделия. В этом случае твердость по Шору А подложки 102 может быть полезно измерять на поверхности подложки 102 без деформируемого слоя 110, наносимого на нее, и можно измерять в центре первой поверхности 104 подложки 102 или на любом другом подходящем месте. В более общем случае твердость по Шору А различных материалов или компонентов ретрографического датчика 100 можно измерять любым способом, который обеспечивает получение полезного сигнала, гарантирующего, что относительные твердости подложки 102, деформируемого слоя 110 и частиц 122, действующие совместно, позволят получать деформацию ретрографического датчика 100 по отношению к поверхности объекта при поддержании предпочтительных свойств контактной поверхности 120, описанных в этой заявке.
[31] Система 150 формирования изображения может быть связана с второй поверхностью 106 подложки 102, например, через защитное покрытие 108 и с помощью любого отдельного крепежного средства, предназначенного для закрепления системы 150 формирования изображения в положении захвата изображений, отраженных от деформируемого слоя 110, через подложку 102. В общем случае система 150 формирования изображения может включать в себя одну или несколько камер 152 с использованием, например, оптических датчиков, таких как приборы с зарядовой связью, датчики изображения на основе комплементарного металло-оксидного полупроводника, датчики изображения на основе металло-оксидного полупроводника N-типа или подобные, наряду с любыми подходящими линзами и другими оптическими элементами для фокусировки света, падающего на эти датчики, для содействия захвату изображения. В общем случае одна или несколько камер 152 могут быть выполнены с возможностью захвата множества изображений деформируемого слоя 110 через первый эластомер подложки 102 для получения изображений из падающего света. В камере 152 могут использоваться поэлементные цветные фильтры или другие регулируемые фильтры, или подобные для избирательного отображения падающего света конкретной длины волны или диапазона длин волн.
[32] Кроме того, может иметься осветительная система 160, включающая один или несколько источников 162 света, таких как светоизлучающие диоды. Осветительная система 160 может быть, например, выполнена с возможностью освещения деформируемого слоя 110 через эластомер подложки 102, например, скользящим освещением или любым другим направленным освещением, которое способствует обнаружению изменений по нормали к поверхности деформируемого слоя 110. Согласно одному аспекту осветительная система может обеспечивать освещение двумя или большим количеством источников 162 света, при этом каждый из источников 162 света создает освещение в диапазоне длин волн, отличающемся от диапазона длин волн с другого направления. При использовании в сочетании с одной или несколькими камерами 152, которые захватывают изображения в соответствующих диапазонах длин волн, освещение этого вида можно использовать для освещения деформируемого слоя 110 с разных направлений при различных длинах волн и можно одновременно захватывать отдельные изображения, каждое из которых освещается с иного направления. Например, три источника 162 света, излучающих в диапазонах длин волн красного, зеленого и голубого света, можно использовать вместе с камерой для цветной съемки, имеющей аналогичным образом фильтруемые каналы формирования изображений, для одновременного отображения поверхности при освещении с трех разных направлений.
[33] Контроллер 170, такой как микропроцессор, микроконтроллер, или другие программируемые или специализированные схемы (или комбинация их) могут быть использованы для координации работы системы 150 формирования изображения и осветительной системы 160 при захвате изображений освещенного деформируемого слоя 110 и обработке получающихся изображений для реконструкции топографии нижележащей поверхности объекта, например, путем оценивания нормалей к поверхности на основании интенсивности освещения, воспринимаемого на камерах 154, и использования нормалей к поверхности для реконструкции топографии поверхности.
[34] На фиг. 2 показан ретрографический датчик, расположенный для использования. Ретрографический датчик 200, который может быть любым из ретрографических датчиков, описанных в этой заявке, может быть расположен для использования выше поверхности 202 объекта, топографическое изображение или другое количественное или качественное изображение которого является желательным.
[35] На фиг. 3 показан ретрографический датчик, наложенный на поверхность объекта. Когда ретрографический датчик 300, который может быть любым из ретрографических датчиков, описанных в этой заявке, располагают для получения изображения, опуская на поверхность 302 объекта, как это схематично показано стрелкой 304, контактная поверхность 320 ретрографического датчика 300, такая как любая из контактных поверхностей, описанных в этой заявке, может деформироваться и прилегать к поверхности 302 объекта. Для получения значительного преимущества контактную поверхность 320 можно выполнять имеющей низкий коэффициент трения, например путем выбора материала или введения частиц, описанных в этой заявке, чтобы контактная поверхность 320 могла скользить по поверхности 302 объекта и легче прилегать к поверхности 302 объекта без артефактов, привносимых сцеплением и упругой деформацией, когда контактная поверхность 320 встречается с поверхностью 302 объекта. Для получения еще одного значительного преимущества контактную поверхность 320 можно выполнять, как описано в этой заявке, с возможностью образования воздушных каналов для выпуска воздуха или других газов, или текучих сред, когда контактная поверхность 320 окружает поверхность 302 объекта и перемещается по топографически изменяющимся участкам, таким как выемка 322, на которых в противном случае газ может захватываться, создавая помехи точным измерениям поверхности при использовании ретрографического датчика 300.
[36] Когда контактная поверхность 320 ретрографического датчика 300 геометрически изменяется в ответ на соприкосновение с поверхностью 302 объекта, изменения геометрии вызывают локализованные изменения по нормали к поверхности и связанные с ними локализованные изменения в количестве света, отраженного от деформируемого слоя (непоказанного) к устройствам формирования изображения, таким как камеры 152, описанные выше с обращением к фиг. 1. Эти данные изображения могут быть проанализированы для реконструкции трехмерной формы поверхности 302 объекта, соприкасающейся с деформируемым слоем 110, или в ином случае данные изображения могут быть обработаны для извлечения и/или представления двумерных или трехмерных данных. Ряд соответствующих конфигураций и способов формирования изображения возможен при использовании ретрографических датчиков и связанных с ними технических средств, описанных в этой заявке. Например, что касается фиг. 1, то контроллер 170 может реализовывать функции фотометрического стереоскопического анализатора, выполненного с возможностью оценивания по меньшей мере одной из нормали к поверхности и высоты поверхности деформируемого слоя 110 на множестве мест при использовании первого изображения деформируемого слоя 110, захваченного камерой (камерами) 152 в первом цвете, и второго изображения деформируемого слоя 110, захваченного камерой (камерами) 152 во втором цвете, или в более общем случае с возможностью извлечения трехмерных данных при использовании двух или большего количества изображений деформируемого слоя, захваченных в двух или большем количестве различных диапазонах длин волн. Контроллер 170 может реализовывать функции контроллера освещения, например, при использовании компьютерного кода, исполняемого контроллером 170, для последовательного освещения первой поверхности 104 через подложку 102 двумя или большим количеством различных источников 162 света, каждый из которых находится на отдельном месте.
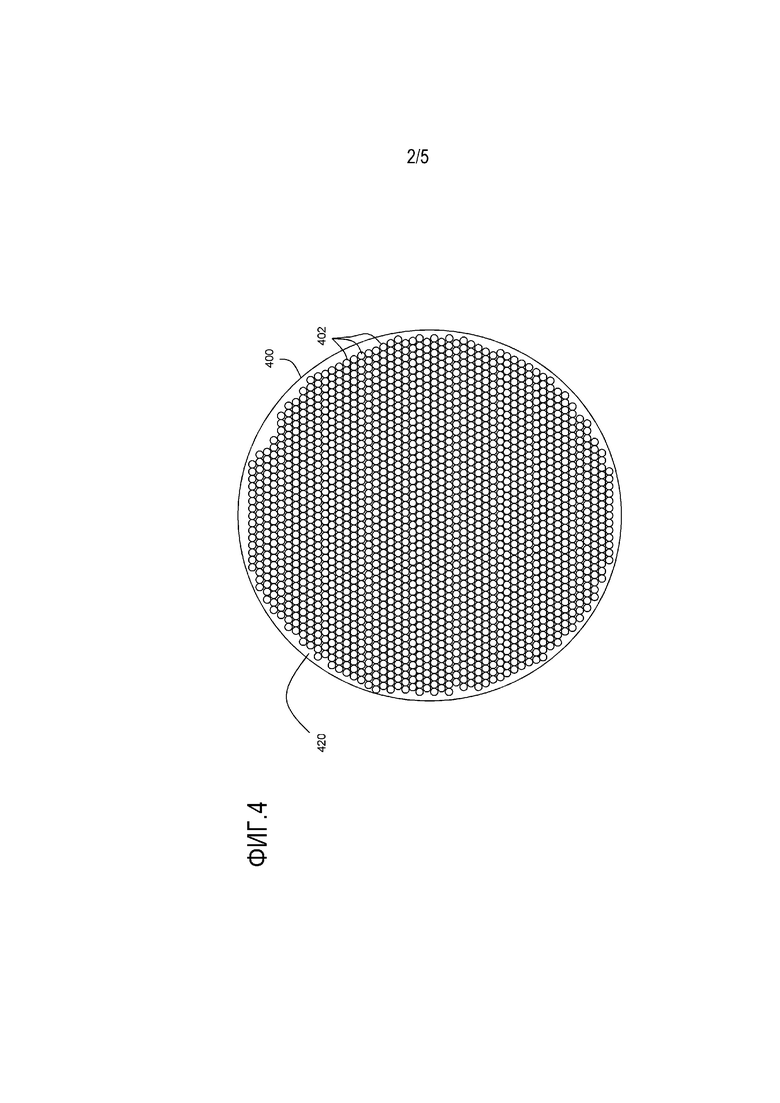
[37] На фиг. 4 показана контактная поверхность ретрографического датчика. В общем случае ретрографический датчик 400, который может быть любым из ретрографических датчиков, описанных в этой заявке, может включать в себя некоторое количество частиц 402, расположенных в виде структуры, для образования части или всей контактной поверхности 420 ретрографического датчика 400. Такая структура показана на фиг. 4 как нормальная проекция в плоскости x-y, параллельной контактной поверхности 420. Следует понимать, что, хотя частицы 402 показаны как окружности, эти окружности необязательно имеют такой размер, и размер и форму частиц можно изменять в соответствии с предполагаемым использованием. Например, диаметр частиц 402 может быть от одного до двадцати пяти микрометров или в более общем случае размеры находятся на уровне или ниже заданной разрешающей способности формируемого изображения для ретрографического датчика 400.
[38] В общем случае структура может образовывать матрицу с малым шагом, которая может быть регулярной матрицей, такой как квадратная или гексагональная матрица, или нерегулярной матрицей. Согласно одному аспекту матрица может быть по существу гексагональной матрицей, например, в основном гексагональной с различными промежуточными нерегулярностями, которые не исключают соприкосновения большей части частиц 402 с шестью другими соседними частицами 402. Структура также может или взамен включать в себя множество локально гексагональных матриц, связанных с другими матрицами частиц 402, которые заполняют области между другими гексагональными областями. Предложен ряд объективных показателей регулярности, таких как расстояния между ближайшими соседями. Согласно одному аспекту регулярность гексагональной матрицы частиц 402 по существу одинакового размера можно оценивать на основании среднего количества контактов с соседними частицами 402 (например, около шести контактных точек означают более регулярную матрицу).
[39] Хотя предполагается, что регулярность должна быть хорошей для согласованного покрытия контактной поверхности 420 способом, способствующим формированию изображения, любую другую структуру из близкорасположенных частиц 402, например нерегулярную структуру, можно также или взамен использовать при условии, что частицы 402 находятся достаточно близко друг к другу со строгим поддержанием физических каналов между ними для выпуска газа, когда контактную поверхность 420 прижимают к поверхности объекта. То есть, предпочтительно, чтобы в структуре из частиц 402 могли успешно формироваться промежуточные каналы, которые позволяют протекать воздуху между частицами 402 на стороне, противолежащей деформируемому слою ретрографического датчика 400, например на контактной поверхности 420, для исключения захваченных пузырьков воздуха или другого газа, которые в ином случае могут препятствовать точному формированию изображения поверхности объекта. Кроме того, в общем случае частицы 402 могут соприкасаться друг с другом в структуре, например, могут находиться в непосредственном контакте, или частицы 402 могут быть отделены, либо вследствие низкой плотности расположения, либо вследствие физического отделения частиц 402 слоем адгезива или промежуточного эластомера, например, от деформируемого слоя.
[40] Частицы 402 могут иметь различные размеры и распределения. Согласно одному аспекту частицы 402 являются монодисперсными или по существу монодисперсными. Более конкретно, частицы 402 могут быть монодисперсными сферами, так что частицы 402 будут склонны располагаться в плоскости с образованием по существу гексагональной матрицы. Согласно одному аспекту частицы 402 могут иметь средний диаметр около пяти микрометров. Согласно другому аспекту частицы 402 могут иметь средний диаметр в пределах от трех до десяти микрометров или от одного до двадцати пяти микрометров. Как отмечалось выше, предпочтительно, чтобы диаметр частиц 402 был не больше, чем заданная разрешающая способность изображения, формируемого устройством с использованием ретрографического датчика 400. Согласно еще одному аспекту частицы 402 могут включать в себя несферические частицы с наибольшим диаметром, находящемся в пределах, упомянутых выше. В общем случае любая такая форма может быть использована при условии, что не создается плотное размещение, при котором промежуточные каналы для выхода воздуха закупориваются.
[41] Полидисперсные частицы могут быть также или взамен использованы. Например, частицы 402 могут быть полидисперсными с первым стандартным отклонением в отношении среднего размера частиц, определяющим диапазон, попадающий в пределы от одного до десяти микрометров. Степень полидисперсности можно характеризировать другими способами. Например, можно использовать безразмерные показатели, такие как вариация (cv) или относительное стандартное отклонение:

где σ является стандартным отклонением распределения частиц по размерам и µ является средним значением. Эти значения обычно предоставляются промышленными поставщиками объемных микросфер и других представляющих интерес частиц.
[42] В общем случае частицы, имеющие более единообразную форму, должны образовывать более регулярные матрицы, чем при других распределениях (за исключением некоторых случаев бимодальных распределений и других специфических распределений, которые потенциально могут приводить к получению регулярно скомпонованных матриц), и должны обеспечивать подавление соответствующих дефектов при формировании изображения. Поэтому низкий коэффициент вариации (например, 0% для случая совершенно монодисперсных частиц) служит показателем качества, который связывает распределения частиц по размерам с характеристиками ретрографических датчиков. Эмпирически установлено, что для микросфер размером порядка от одного до десяти микрометров является предпочтительным коэффициент вариации, который составляет около 0%. Однако коэффициенты вариации от 15 до 25% также приводят к получению приемлемых результатов, при этом характеристики формируемого изображения могут различаться в пределах 15-25%. Конечно, также могут использоваться более дисперсные частицы 402, и такие распределения частиц могут все еще приводить к получению определенных преимуществ, таких как наличие промежуточных каналов для выпуска воздуха и низкий коэффициент трения. Однако следствием использования этих более дисперсных частиц 402 может быть также ухудшение разрешающей способности формируемого изображения, непропорциональное среднему размеру частиц, а также другие артефакты формируемого изображения, которые снижают точность изображений и реконструкций при использовании получающегося ретрографического датчика.
[43] Частицы 402 могут быть образованы из ряда материалов, включая полимеры, природные полимеры и минералы. Например, частицы 402 могут быть успешно образованы из полиметилсилсесквиоксана или могут включать его. Полиметилсилсесквиоксан (PMSQ) обеспечивает определенные преимущества, когда используется для частиц 402 в контактной поверхности 420. Полиметилсилсесквиоксан имеет относительно низкий коэффициент трения, он является жестким (по сравнению с эластомером подложки), а микросферы из полиметилсилсесквиоксана с узкими распределениями частиц по размерам легко доступны для приобретения. Однако несферические частицы могут быть также или взамен использованы, а частицы 402 могут быть успешно образованы из материалов других видов. Например, частицы 402 могут быть образованы из диоксида кремния, стекла, меламина, полистирола, полиметилметакрилата, полибутилметакрилата, сополимера стирола и акрилата, целлюлозы и полимолочной кислоты. Частицы 402 могут быть также или взамен образованы из нейлона или политетрафторэтилена. В более общем случае любой жесткий материал, который является подходящим по размерам и формам, может быть использован в качестве частиц 402 в контактной поверхности 420, рассмотренной в этой заявке. Другие подходящие и доступные для приобретения микрочастицы включают в себя, но без ограничения ими, микросферы, образованные из метилметакрилатного сшитого полимера, полибутилакрилата и диоксида кремния, сшитого лаурилметакрилатного и гликольдиметакрилатного полимера, сополимера акрилатов, этилгексилакрилата и диметиконметакрилата, сшитого гексаметилендиизоцинатного и триметилолгексиллактонового полимера вместе с диоксидом кремния, сополимера этилена и акриловой кислоты, полиэтилена, нейлона-6, нейлона-12, силиката кальция, винилдиметиконового и метиконсилсесквиоксанового сшитого полимера и сочетания упомянутых выше.
[44] На фиг. 5 показан вид сбоку ретрографического датчика. Ретрографический датчик 500 может быть любым из ретрографических датчиков, описанных в этой заявке, за исключением тех случаев, когда указано иное. Хотя частицы 522 ретрографического датчика 500 могут быть по меньшей мере частично внедрены в деформируемый слой 510, например, как описано выше, частицы 522 могут быть также или взамен прикреплены к деформируемому слою 510 адгезивом 580, таким как полиуретан, или же косвенно связаны с деформируемым слоем 510 с помощью одного или нескольких промежуточных слоев. В общем случае частицы 522 могут быть вытянуты от адгезива 580 для получения связанного с этим преимущества низкого коэффициента трения, а также возникающих в связи с этим промежуточных каналов, хотя количество частиц 522, вытянутых от адгезива 580, может зависеть от ряда факторов, таких прочность адгезива 580 и форма частиц 522. Согласно одному аспекту частицы 522 могут быть сферическими частицами и могут быть вытянуты на по меньшей мере половину диаметра над слоем адгезива 580, соединяющего частицы 522 с деформируемым слоем 510.
[45] На фиг. 6 показан вид сбоку ретрографического датчика. Ретрографический датчик 600 может быть любым из ретрографических датчиков, описанных в этой заявке, за исключением тех случаев, когда указано иное. Хотя частицы, описанные в этой заявке, могут создавать одну возможную контактную поверхность, в более общем случае ретрографический датчик 600 может включать в себя контактную поверхность 620, расположенную на деформируемом слое 610, имеющем неплоские элементы 622, образующие промежуточные каналы 622, которые позволяют воздуху протекать между неплоскими элементами 622. Полезно, чтобы эти неплоские элементы 622 могли иметь более высокую твердость, чем твердость подложки 602, для согласованной передачи топографии поверхности объекта в деформируемый слой 610 и подложку 602 при соприкосновении, а также меньший коэффициент трения, чем коэффициент трения деформируемого слоя 610, для содействия перемещению контактной поверхности 620 по поверхности объекта, когда при использовании ретрографический датчик 600 располагают на поверхности объекта.
[46] Неплоские элементы 622 могут включать в себя частицы, расположенные на деформируемом слое 610, описанном в этой заявке. Неплоские элементы 622 могут также или взамен включать в себя стойки, вытянутые от деформируемого слоя 610. Твердость неплоских элементов 622 может быть более высокой, чем твердость деформируемого слоя 610. В общем случае неплоские элементы 622 могут продолжаться под прямым углом к поверхности подложки 602, например, как вертикальные стенки, или неплоские элементы 622 могут быть криволинейными, наклонными или же различными по форме вдоль оси, параллельной нормали к подложке. Хотя ряд таких элементов может быть образован путем внедрения частиц или других дискретных объектов в деформируемый слой 610 (или адгезив 680, связанный с деформируемым слоем 610), неплоские элементы 622 могут быть также или взамен образованы на деформируемом слое 610. Например, матрица выступов может быть образована формовкой непосредственно на деформируемом слое 610, например, путем выполнения в форме матрицы небольших углублений и заполнения углублений материалом, который отверждают для получения относительно твердой поверхности с относительно низким коэффициентом трения. Затем эти заполненные углубления могут быть перемещены и прикреплены к поверхности датчика, и на этом месте они образуют матрицу неплоских элементов 622, обеспечивающую такие же преимущества, какие обеспечивают частицы, описанные в этой заявке.
[47] На фиг. 7 показан вид сбоку ретрографического датчика. Ретрографический датчик 700 может быть любым из ретрографических датчиков, описанных в этой заявке, за исключением тех случаев, когда указано иное. Ретрографический датчик 700 может включать в себя некоторое количество неплоских элементов 722 для формирования изображения повышенного качества, описанного в этой заявке. Согласно одному аспекту неплоские элементы 722 могут включать в себя конические структуры, вытянутые от деформируемого слоя. Конические структуры могут включать в себя, например, пирамиды, конусы, усеченные конусы или другие конические структуры, или подобные. Структуры с большим отношением размеров могут вызывать артефакты, обусловленные сдвиговыми силами, действующими на контактную поверхность 720 ретрографического датчика 700, и их предпочтительно исключать, если только не предполагается обнаружение таких сил или они не считается полезными при конкретном применении для формирования изображения.
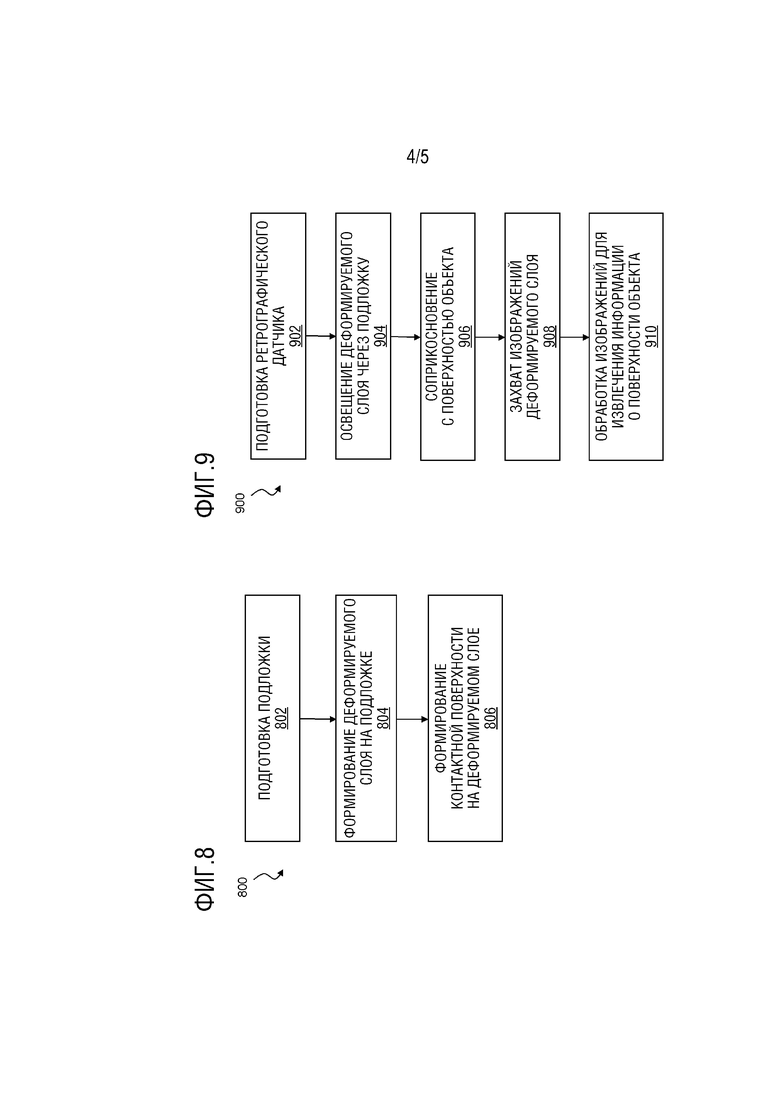
[48] На фиг. 8 показана блок-схема последовательности действий способа изготовления ретрографического датчика.
[49] Как показано, на этапе 802 способ может начинаться с подготовки подложки, образованной из эластомера, способного, как описано в этой заявке, пропускать изображение. Она может представлять собой подложку, образованную из блока прозрачного полистиролового сополимерного эластомера толщиной около 3 мм, или подложку с любыми другими размерами и из материала, пригодного для формирования изображения, рассмотренного в этой заявке.
[50] Как показано, на этапе 804 способ 800 может включать в себя формирование деформируемого слоя на подложке, такого как 2,33-микрометровый слой деформируемого материала, включающего красный железоокисный пигмент, или любого материала из других деформируемых материалов, описанных в этой заявке, таких как деформируемый материал, который ненаправленно отражает свет, проходящий через подложку и падающий на поверхность подложки, прилегающей к деформируемому слою. Деформируемый слой может быть образован, например, нанесением центрифугированием деформируемого материала на подложку, или же размещением слоя деформируемого материала на подложке, или формовкой подложки на предварительно образованном слое деформируемого материала. Деформируемый слой может быть также или взамен покрыт 1-микрометровым слоем защитного термопластичного эластомера (на стороне, противоположной подложке), который эффективно создает липкую поверхность для прилипания микросфер или других частиц.
[51] Как показано, на этапе 806 способ может включать в себя формирование контактной поверхности, такой как любая из контактных поверхностей, описанных в этой заявке, на деформируемом слое. Например, контактная поверхность может быть выполнена с возможностью соприкосновения с поверхностью объекта для формирования изображения с помощью ретрографического датчика. Например, контактная поверхность может включать в себя частицы, более твердые, чем подложка, и расположенные в виде структуры на деформируемом слое, и отделенные от подложки деформируемым слоем.
[52] Согласно одному аспекту этот этап может включать в себя нанесение порошка из 6-микрометровых монодисперсных микросфер из полиметилсилсесквиоксана на деформируемый слой способом, при использовании которого порошок распределяется с образованием плотно уложенного монослоя. Формирование контактной поверхности может также или взамен включать в себя нанесение водной суспензии полиуретана или другого адгезива на поверхность и обеспечение возможности растекания адгезива и смачивания деформируемого слоя и микросфер. Например, нанесение покрытия центрифугированием может быть использовано для нанесения водного полиуретана на деформируемой слой, при условии соответствующей координации скорости вращения установки для нанесения покрытия центрифугированием и вязкости суспензии (или концентрации микросфер при сгущении или любого другого показателя вязкости или потока).
[53] Согласно другому аспекту формирование контактной поверхности может включать в себя нанесение частиц в водном растворе полиуретана на деформируемый слой. Согласно еще одному аспекту это может включать в себя нанесение центрифугированием покрытия из смеси адгезива и частиц, таких как монодисперсные частицы полиметилсилсесквиоксана, на деформируемый слой. В любом случае формирование контактной поверхности может также включать в себя сушку адгезива для получения матрицы частиц с открытыми верхними поверхностями и нижними участками, сцепленными с термопластичным эластомерным материалом деформируемого слоя.
[54] Как отмечалось выше, деформируемый слой или эластомер подложки может включать в себя придающий липкость реагент, который способствует сцеплению частиц. В этом случае, как описывалось выше, формирование контактной поверхности может включать в себя нанесение слоя частиц на деформируемый слой и затем заливку водного полиуретана или другого подходящего адгезива на частицы. В качестве неограничивающего примера частицы могут иметь размеры в пределах от около одного до около двадцати пяти микрометров. Согласно одному аспекту частицы включают в себя монодисперсные частицы полиметилсилсесквиоксана. Согласно другому аспекту частицы включают в себя полидисперсный полиметилсилсесквиоксан. В более общем случае частицы могут включать в себя любые частицы, описанные в этой заявке, включая частицы, имеющие различные формы, размерности, материалы, размеры и распределения по размерам.
[55] На фиг. 9 показана блок-схема последовательности действий способа метрологии поверхности с использованием ретрографического датчика.
[56] Как показано, на этапе 902 способ 900 может включать в себя подготовку ретрографического датчика, такого как любой из ретрографических датчиков, описанных в этой заявке. В качестве неограничивающего примера ретрографический датчик может включать в себя подложку, деформируемый слой и контактную поверхность. Подложка может быть образована из первого эластомера, способного пропускать изображения и имеющего первую твердость. Деформируемый слой может быть расположен на первой поверхности подложки и может включать в себя материал, отражающий свет, падающий на первую поверхность подложки. Контактная поверхность может представлять собой поверхность, предназначенную для помещения в соприкосновение с изображаемым объектом, и может быть образована матрицей частиц, расположенных на деформируемом слое и отделенных от подложки деформируемым слоем. Частицы контактной поверхности могут иметь вторую твердость, более высокую, чем первая твердость первого эластомера подложки.
[57] Как показано, на этапе 904 способ 900 может включать в себя освещение материала деформируемого слоя источником света, таким как светоизлучающий диод или матрица светоизлучающих диодов, со стороны, обращенной к подложке.
[58] Как показано, на этапе 906 способ 900 может включать в себя соприкосновение контактной поверхности ретрографического датчика с поверхностью объекта для изменения геометрии деформируемого слоя.
[59] Как показано, на этапе 908 способ 900 может включать в себя захват изображения деформируемого слоя со стороны, обращенной к подложке, при освещении материала и соприкосновении контактной поверхности с поверхностью объекта. Это может также или взамен включать в себя захват некоторого количества изображений при боковом освещении под различными углами, что может повышать точность, обеспечивать дополнительную информацию относительно загороженной поверхности или же повышать количественную точность получающихся реконструированных трехмерных изображений.
[60] Как показано, на этапе 910 способ 900 может включать в себя обработку изображений для извлечения информации о поверхности объекта, такой как топография поверхности, или другой двумерной или трехмерной информации. Согласно одному аспекту это включает в себя анализ изображения (или множества изображений) для определения трехмерной геометрии поверхности объекта, например, получение нормалей к поверхности на основании интенсивности отраженного света и объединение нормалей к поверхности для определения высоты поверхности объекта на местах в пределах изображения. Это может также или взамен включать в себя анализ множества изображений, получаемых, например, при различных углах или направлениях скользящего освещения. Поэтому, например, способ 900 может включать в себя освещение деформируемого слоя с двух или большего количества направлений, захват изображения деформируемого слоя при освещении с каждого из двух или большего количества различных направлений и анализ получающегося множества изображений для определения трехмерной геометрии поверхности объекта.
[61] Согласно другому аспекту система формирования изображения может быть канализирована при использовании цвета, например, для поддержания одновременного формирования изображений при освещении с различных направлений. Поэтому способ 900 может включать в себя, например, освещение деформируемого слоя одновременно первым источником света первого цвета и вторым источником света второго цвета, отличающегося от первого цвета. Согласно этому аспекту способ 900 может также включать в себя захват многоцветного изображения деформируемого слоя, проведение различия между картиной освещения от первого источника света и второго источника света и анализ многоцветного изображения для определения трехмерной геометрии поверхности объекта на основании картины освещения от первого источника света и второго источника света. В более общем случае можно использовать несколько различных цветов и в частности, три различных цвета, таких как красный, зеленый и голубой, могут без труда различаться имеющимися в продаже оптическими системами, такими как камера для цветной съемки или датчики цветного изображения, и могут использоваться для канализации системы формирования изображения, чтобы поддерживать одновременное формирование изображения при освещении с трех различных направлений в одно и то же время, например, в виде одного цветного изображения.
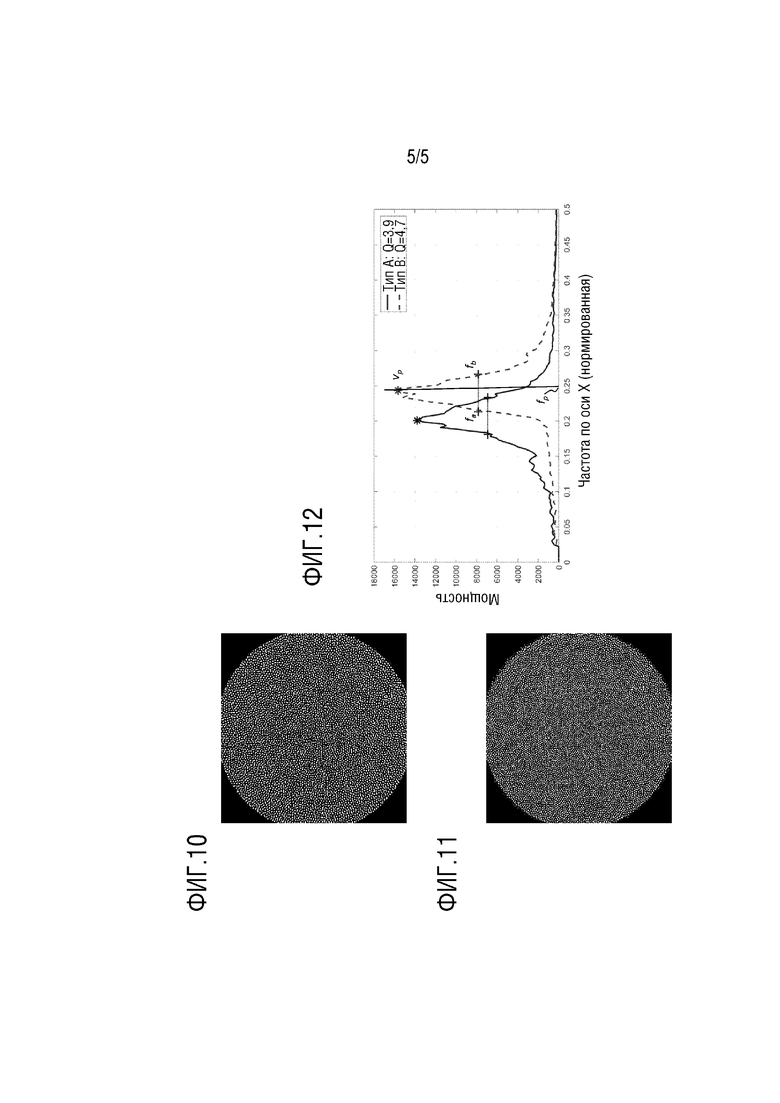
[62] На фиг. 10 показано изображение, полученное с помощью оптического микроскопа, матрицы 6-микрометровых микросфер первого типа и на фиг. 11 показано изображение, полученное с помощью оптического микроскопа, матрицы 6-микрометровых микросфер второго типа. В общем случае микросферы из фиг. 11 (типа А) известны как более монодисперсные, например, с более единообразным диаметром, чем микросферы из фиг. 10 (типа В), и поэтому можно ожидать более регулярной структуры при компоновке в двумерную матрицу, например, при нанесении в качестве монослоя на контактную поверхность ретрографического датчика.
[63] На фиг. 12 показан средний радиальный спектр мощности для микросферных матриц из фиг. 10 и 11. Хотя некоторое количество способов можно использовать для измерения регулярности геометрических структур, спектр мощности изображаемых поверхностей представляет собой полезный показатель для оценивания пригодности структуры частиц для формирования высокоразрешающего свободного от ошибок изображения. Чтобы получать этот количественный показатель, изображения контактной поверхности, получаемые с помощью оптического микроскопа, можно ограничивать по полосе и уровню для повышения контраста, чтобы создавать изображения, показанные на фиг. 10-11. Ограниченные по полосе и уровню изображения (такие как изображения на фиг. 10-11) затем можно умножать на окно Гаусса для минимизации краевых артефактов (от черных краев изображений), что приведет к свертыванию представления в частотной области изображений с окном Гаусса. После этого величины представления в частотной области могут быть возведены в квадрат для получения двумерного спектра мощности. В общем случае следует ожидать, что спектр мощности менее регулярной структуры частиц будет иметь более низкую частоту и более широкую полосу интенсивных частот, чем более регулярная структура. Эти характеристики могут быть выражены количественно путем оценивания формы полосы частотной области, представляющей доминирующую частоту матрицы.
[64] В общем случае двумерный спектр мощности должен иметь радиальную симметрию, чтобы сигнал можно было усреднять по радиусу, а постоянный ток и другие очень низкочастотные составляющие можно было исключать. Получающиеся спектры мощности для структур из фиг. 10 (типа А) и фиг. 11 (типа В) показаны на фиг. 12. В случае этих спектров мощности пиковая мощность νp может располагаться на пиковой частоте fp. В таком случае частоты fa и fb, соответствующие половинной мощности, определяются как частоты выше и ниже пиковой частоты fp, где мощность составляет 50% пиковой мощности νp. Эти значения обозначены на фиг. 12 для частиц типа В. При этих значениях, определенных для спектра мощности конкретной структуры частиц, Q-показатель (показатель качества) для полосы доминирующих частот может быть определен как:
[65] Этот Q-показатель выполняет функцию показателя регулярности, при этом более высокий показатель означает более регулярную матрицу частиц на контактной поверхности. В случае применения этой формулы для структур из фиг. 10-11 частицы типа В имеют Q-показатель около 4,7 и являются очень хорошими для формирования изображения. Частицы типа А имеют Q-показатель около 3,9 и также являются пригодными для формирования изображения.
[66] Опытным путем установлено, что Q-показатель выше 2 для микросфер размером 1-20 мкм означает структуру, которая является достаточно регулярной при использовании в ретрографическом датчике, не вносящей существенных артефактов в изображение, которые ограничивают точность или разрешающую способность. Поэтому согласно одному аспекту полезно, чтобы контактная поверхность ретрографического датчика имела структуру из микросфер с усредненным по радиусу двумерным спектром мощности, имеющим Q-показатель по меньшей мере 2, где Q-показатель равен пиковой частоте, деленной на разность частот, соответствующих половинной мощности (из усредненного по радиусу двумерного спектра мощности). При Q-показателе выше 3 обычно получается значительно улучшенная характеристика, а при Q-показателе выше 4,5 появляется возможность получения наиболее точного изображения через монослой частиц. Кроме того, при Q-показателе, равном 4,5, предполагается более регулярная упаковка, согласующаяся с микросферами, имеющими сравнительно одинаковый размер и форму (например, с монодисперсными). Однако следует понимать, что очень монодисперсные частицы также могут иметь плохой Q-показатель при определенных условиях, таких как, когда частицы распределены неравномерно или когда частицы только частично покрывают поверхность и остаются относительно большие открытые участки. В таких случаях контактная поверхность может быть причиной низкого Q-показателя (возможно, необычно низкого Q-показателя) несмотря на высокую геометрическую регулярность отдельных частиц.
[67] Описанные выше системы, устройства, способы, процессы и т.п. могут быть реализованы в виде технических средств, программных средств или любого сочетания их, пригодного для конкретного применения. Технические средства могут включать в себя компьютер общего назначения и/или специализированное вычислительное устройство. Они включают в себя один или несколько микропроцессоров, микроконтроллеров, встроенных микроконтроллеров, программируемых цифровых процессоров сигналов, или других программируемых устройств, или схем обработки наряду с внутренним и/или внешним запоминающим устройством. Они могут также или взамен включать в себя интегральные схемы прикладной ориентации, программируемые вентильные матрицы, программируемые матричные логические компоненты или другое устройство или устройства, которые могут быть сконфигурированы для обработки электронных сигналов. Кроме того, следует понимать, что реализация процессов или устройств, описанных выше, может включать в себя исполняемый компьютером код, созданный при использовании структурированного языка программирования, такого как С, объектно-ориентированного языка программирования, такого как С++, или любого другого языка программирования высокого уровня или низкого уровня (включая языки ассемблера, языки описания технических средств и языки программирования, ориентированные на работу с базами данных), которые могут сохраняться, согласовываться или интерпретироваться, чтобы выполняться при использовании одного из упомянутых выше устройств, а также неоднородных комбинаций процессоров, процессорных архитектур или комбинаций различных технических и программных средств. Согласно другому аспекту способы могут быть осуществлены посредством систем, которые выполняют этапы способа, и могут быть распределены по устройствам различным образом. В то же время обработка может быть распределена по устройствам, таким как различные системы, описанные выше, или все выполняемые функции могут быть сведены в специализированное автономное устройство или другое техническое средство. Согласно еще одному аспекту средства для выполнения этапов, связанных с процессами, описанными выше, могут включать в себя любое из технических средств и/или программных средств. Все такие перестановки и комбинации предполагаются попадающими в объем настоящего раскрытия.
[68] Варианты осуществления, описанные в этой заявке, могут включать в себя компьютерные программные продукты, содержащие исполняемый компьютером код или используемый компьютером код, при исполнении которого на одном или нескольких вычислительных устройствах выполняется любой и/или все этапы. Код может сохраняться энергонезависимым способом в запоминающем устройстве компьютера, которое может быть запоминающим устройством, благодаря которому программа выполняется (таким как оперативное запоминающее устройство, связанное с процессором), или устройством хранения данных, таким как дисковый накопитель, флэш-память, или любое другое оптическое, электромагнитное, магнитное, инфракрасное или другое устройство или комбинация устройств. Согласно другому аспекту любая из систем и способов, описанных выше, может быть осуществлена в любой подходящей среде передачи или распространения сигнала, переносящей исполняемый компьютером код и/или любые входные данные или выходные данные.
[69] Реализации этапов способов, описанных в этой заявке, предполагаются охватывающими любой подходящий порядок выполнения таких этапов способов, согласующийся с патентоспособностью нижеследующей формулы изобретения, за исключением случаев, когда другой смысл прямо следует или же ясен из контекста. Таким образом, например, выполнение этапа X включает в себя любой подходящий порядок, обусловленный другим участником, таким как удаленный пользователь, удаленный ресурс обработки (например, сервер или компьютер в облаке или машины для выполнения этапа X. Аналогично этому, выполнение этапов X, Y и Z может включать любой порядок управления или регулирования любой комбинации таких других индивидуализированных объектов или ресурсов для выполнения этапов X, Y и Z, чтобы получать эффект от этих этапов. Таким образом, реализации этапов способов, описанных в этой заявке, предполагаются охватывающими любой подходящий порядок выполнения этапов, согласующийся с одним или несколькими другими участниками или субъектами, согласующийся с патентоспособностью нижеследующей формулы изобретения, за исключением случаев, когда другой смысл прямо следует или же ясен из контекста. Такие участники или субъекты не обязательно должны направляться или управляться любым другим участником или субъектом и не обязательно должны находиться в конкретной правовой сфере.
[70] Следует понимать, что устройства, системы и способы, описанные выше, изложены для примера, а не для ограничения. При отсутствии ясного указания на противоположное раскрытые этапы могут быть модифицированы, дополнены, опущены и/или переупорядочены без отступления от сущности этого раскрытия. Многочисленные изменения, дополнения, исключения и другие модификации должны быть очевидными для специалиста в данной области техники. Кроме того, представление или порядок выполнения этапов способов в описании и на чертежах, изложенный выше, не предполагается требующим выполнения изложенных этапов в этом порядке за исключением случаев, когда конкретный порядок определенно требуется или же ясен из контекста. Таким образом, хотя показаны и описаны конкретные варианты осуществления, специалистам в данной области техники должно быть очевидно, что различные изменения и модификации по форме и в деталях могут быть сделаны без отступления от сущности объема этого раскрытия и предполагаются образующими часть изобретения, определенного в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ | 2018 |
|
RU2741485C1 |
| СИСТЕМЫ ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ | 2018 |
|
RU2784641C2 |
| МУЛЬТИПЛЕКСИРОВАНИЕ АКТИВНОГО СЕНСОРНОГО ДЕТЕКТОРА С ИСПОЛЬЗОВАНИЕМ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ | 2019 |
|
RU2738756C1 |
| АНАЛИЗЫ | 2009 |
|
RU2521639C2 |
| ПЕЧАТНОЕ ОФСЕТНОЕ ПОЛОТНО (ВАРИАНТЫ), СЖИМАЕМАЯ ТКАНЬ, КОМПОЗИТНОЕ ИЗДЕЛИЕ, СПОСОБ ИЗГОТОВЛЕНИЯ СЖИМАЕМОЙ ТКАНИ, СПОСОБ ИЗГОТОВЛЕНИЯ ПЕЧАТНОГО ОФСЕТНОГО ПОЛОТНА, СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИТНОГО МАТЕРИАЛА | 1992 |
|
RU2110410C1 |
| ОПТИЧЕСКИЙ ДАТЧИК С МНОГОСЛОЙНОЙ ПЛАЗМОННОЙ СТРУКТУРОЙ ДЛЯ УСОВЕРШЕНСТВОВАННОГО ОБНАРУЖЕНИЯ ХИМИЧЕСКИХ ГРУПП ПОСРЕДСТВОМ SERS | 2005 |
|
RU2361193C2 |
| ПЕРЕНОС ЭЛЕКТРОННЫХ УСТРОЙСТВ ПУТЕМ ПОГРУЖЕНИЯ В ЖИДКОСТЬ | 2015 |
|
RU2694923C2 |
| МАСКА ВЫСОКОЙ ПЛОТНОСТИ ДЛЯ ТРЕХМЕРНЫХ ПОДЛОЖЕК И СПОСОБЫ ЕЕ ПОЛУЧЕНИЯ | 2013 |
|
RU2573127C2 |
| ЭЛЕКТРИЧЕСКИЕ СОЕДИНЕНИЯ В ЭЛЕКТРОННЫХ КОНТАКТНЫХ ЛИНЗАХ | 2012 |
|
RU2626981C2 |
| ОСВЕЩЕНИЕ ДЛЯ ФЛУОРЕСЦЕНТНОЙ ВИЗУАЛИЗАЦИИ С ПОМОЩЬЮ ЛИНЗЫ ОБЪЕКТИВА | 2019 |
|
RU2737056C1 |
Ретрографический датчик включает в себя прозрачную эластомерную подложку, деформируемый отражающий слой и контактную поверхность с матрицей жестких неплоских элементов, образованных из материала, или со структурой частиц для ослабления сцепления с поверхностью объекта и в то же время для предоставления возможности захваченному воздуху выходить из представляющей интерес области. Это сочетание элементов позволяет контактной поверхности датчика более точно согласовываться с поверхностью объекта и в то же время осуществлять физическую передачу топографии поверхности объекта деформируемому слою для формирования изображения через подложку. 4 н. и 65 з.п. ф-лы, 12 ил.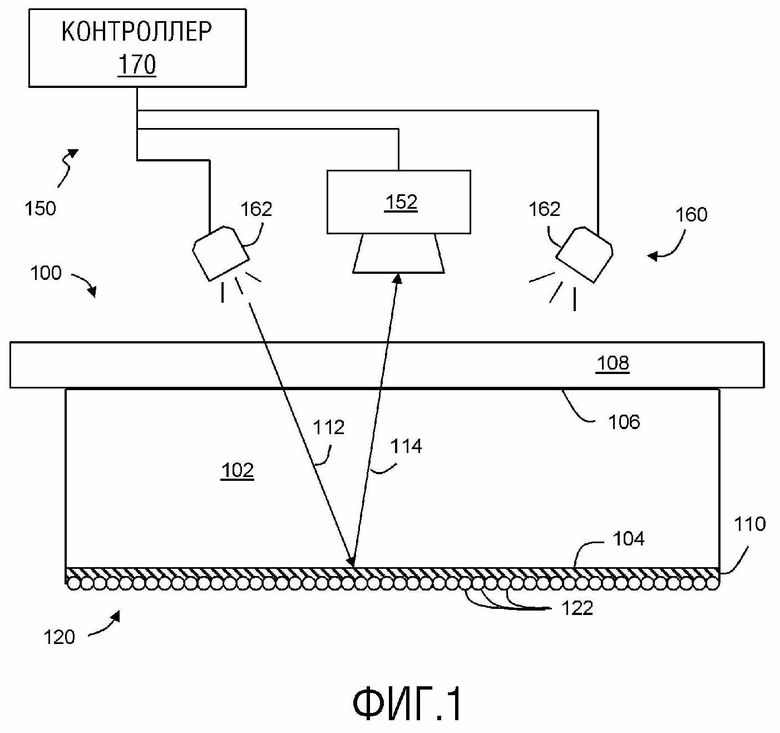
1. Ретрографический датчик, содержащий: подложку с первой поверхностью, при этом подложка образована из первого эластомера, способного пропускать изображение и имеющего первую твердость; деформируемый слой, расположенный на первой поверхности подложки, при этом деформируемый слой включает в себя материал, который отражает свет, проходящий через подложку и падающий на первую поверхность; и контактную поверхность для помещения в соприкосновение с изображаемым объектом, при этом контактная поверхность включает в себя частицы, расположенные в виде структуры на деформируемом слое и отделенные от подложки деформируемым слоем, при этом частицы имеют вторую твердость, более высокую, чем первая твердость первого эластомера.
2. Ретрографический датчик по п. 1, в котором структура образует один слой частиц на деформируемом слое.
3. Ретрографический датчик по п. 1, в котором структура представляет собой матрицу с малым шагом.
4. Ретрографический датчик по п. 1, в котором структура представляет собой регулярную матрицу.
5. Ретрографический датчик по п. 1, в котором структура включает в себя множество локально гексагональных матриц.
6. Ретрографический датчик по п. 1, в котором структура представляет собой по существу гексагональную матрицу.
7. Ретрографический датчик по п. 6, в котором частицы соприкасаются друг с другом в структуре.
8. Ретрографический датчик по п. 1, в котором первая поверхность подложки является выпуклой.
9. Ретрографический датчик по п. 1, в котором структура частиц образует промежуточные каналы, которые позволяют воздуху протекать между частицами на стороне, противоположной деформируемому слою.
10. Ретрографический датчик по п. 1, в котором частицы являются монодисперсными.
11. Ретрографический датчик по п. 1, в котором частицы представляют собой монодисперсные микросферы.
12. Ретрографический датчик по п. 11, в котором частицы имеют средний диаметр около 5 мкм.
13. Ретрографический датчик по п. 11, в котором частицы имеют средний диаметр в пределах от 3 до 10 мкм.
14. Ретрографический датчик по п. 11, в котором частицы имеют средний диаметр в пределах от 1 до 25 мкм.
15. Ретрографический датчик по п. 1, в котором частицы включают в себя несферические частицы.
16. Ретрографический датчик по п. 1, в котором частицы являются полидисперсными с первым стандартным отклонением относительно среднего размера частиц, попадающего в пределы 1-10 мкм.
17. Ретрографический датчик по п. 1, в котором частицы образованы из полиметилсилсесквиоксана.
18. Ретрографический датчик по п. 1, в котором частицы образованы из одного или более из диоксида кремния, стекла, меламина, полистирола, полиметилметакрилата, полибутилметакрилата, сополимера стирола и акрилата, целлюлозы и полимолочной кислоты.
19. Ретрографический датчик по п. 1, в котором частицы образованы из одного или более из нейлона и политетрафторэтилена.
20. Ретрографический датчик по п. 1, в котором первая твердость по Шору А первого эластомера меньше чем 40.
21. Ретрографический датчик по п. 1, в котором вторая твердость по Шору А частиц больше чем 40.
22. Ретрографический датчик по п. 1, в котором частицы по меньшей мере частично внедрены в деформируемый слой.
23. Ретрографический датчик по п. 1, в котором первый эластомер имеет первую твердость по Шору А по меньшей мере 10, меньшую, чем вторая твердость по Шору А частиц.
24. Ретрографический датчик по п. 1, в котором частицы скреплены с деформируемым слоем адгезивом.
25. Ретрографический датчик по п. 1, в котором частицы скреплены с деформируемым слоем полиуретаном.
26. Ретрографический датчик по п. 1, в котором частицы выступают на по меньшей мере половину диаметра над слоем адгезива, соединяющего частицы с деформируемым слоем.
27. Ретрографический датчик по п. 1, в котором частицы косвенно связаны с деформируемым слоем через промежуточный слой.
28. Ретрографический датчик по п. 1, в котором первый эластомер представляет собой оптически прозрачный эластомер.
29. Ретрографический датчик по п. 1, в котором первый эластомер включает в себя силиконовый каучук.
30. Ретрографический датчик по п. 1, в котором первый эластомер включает в себя стирольный блок-сополимер.
31. Ретрографический датчик по п. 30, в котором первый эластомер включает в себя 20 мас.% гидрогенизированного стирольного блок-сополимера.
32. Ретрографический датчик по п. 30, в котором первый эластомер включает в себя 80 мас.% пластификатора.
33. Ретрографический датчик по п. 32, в котором пластификатор включает в себя придающий клейкость реагент.
34. Ретрографический датчик по п. 1, в котором первый эластомер включает в себя термопластичный эластомер.
35. Ретрографический датчик по п. 1, в котором первый эластомер включает в себя один или более из полиуретана, пластизоля, природного каучука, полиизопрена и поливинилхлорида.
36. Ретрографический датчик по п. 1, в котором деформируемый слой включает в себя отражающие частицы, расположенные во втором эластомере.
37. Ретрографический датчик по п. 1, в котором деформируемый слой включает в себя металлические частицы.
38. Ретрографический датчик по п. 1, в котором деформируемый слой включает в себя неметаллические частицы.
39. Ретрографический датчик по п. 1, в котором деформируемый слой включает в себя диоксид титана.
40. Ретрографический датчик по п. 39, в котором деформируемый слой включает в себя углеродную сажу в количестве, достаточном для придания нейтрального серого цвета диоксиду титана в деформируемом слое.
41. Ретрографический датчик по п. 1, в котором деформируемый слой включает в себя красный оксид железа.
42. Ретрографический датчик по п. 1, в котором материал деформируемого слоя отражает свет ненаправленно.
43. Ретрографический датчик по п. 1, в котором материал деформируемого слоя отражает свет по существу равномерно по всем направлениям.
44. Ретрографический датчик по п. 1, в котором материал деформируемого слоя включает в себя хлопья, которые проявляют по меньшей мере одно свойство из шероховатости поверхности, нерегулярной формы и случайного выравнивания относительно друг друга, что вызывает умеренно направленное отражение света материалом.
45. Ретрографический датчик по п. 1, в котором материал деформируемого слоя включает в себя хлопья, которые являются по существу плоскими, имеют поверхность, подобную зеркальной, и по существу хорошо выровнены относительно друг друга, что вызывает высоконаправленное отражение света материалом.
46. Ретрографический датчик по п. 45, в котором хлопья включают в себя по меньшей мере одни из алюминиевых хлопьев и бронзовых хлопьев.
47. Ретрографический датчик по п. 1, кроме того, содержащий систему формирования изображения, связанную с второй поверхностью подложки, противоположной первой поверхности, при этом система формирования изображения выполнена с возможностью захвата множества изображений деформируемого слоя через первый эластомер.
48. Ретрографический датчик по п. 47, кроме того, содержащий осветительную систему, выполненную с возможностью освещения деформируемого слоя через первый эластомер.
49. Ретрографический датчик по п. 48, в котором осветительная система обеспечивает скользящее освещение для облегчения обнаружения изменений по нормали к поверхности деформируемого слоя.
50. Ретрографический датчик по п. 48, в котором осветительная система обеспечивает освещение двумя или большим количеством источников света, при этом каждый из двух или большего количества источников света освещает в другом диапазоне длин волн с другого направления.
51. Ретрографический датчик по п. 48, кроме того, содержащий фотометрический стереоскопический анализатор, выполненный с возможностью оценивания по меньшей мере одной нормали к поверхности и высоты поверхности деформируемого слоя на множестве мест при использовании двух или большего количества изображений деформируемого слоя, захваченных в двух или большем количестве различных диапазонов длин волн.
52. Ретрографический датчик по п. 1, кроме того, содержащий контроллер освещения для последовательного освещения первой поверхности двумя или большим количеством источников света, каждым на другом месте.
53. Ретрографический датчик, содержащий: подложку из оптически прозрачного эластомера; деформируемый слой, расположенный на поверхности подложки, при этом деформируемый слой включает в себя материал, который отражает свет, проходящий через подложку и падающий на деформируемый слой; и контактную поверхность, расположенную на деформируемом слое, при этом контактная поверхность имеет неплоские элементы с большей твердостью, чем твердость подложки, и коэффициент трения, меньший, чем имеет деформируемый слой, неплоские элементы образуют промежуточные каналы, которые позволяют протекать воздуху между неплоскими элементами контактной поверхности.
54. Ретрографический датчик по п. 53, в котором твердость неплоских элементов больше, чем твердость деформируемого слоя.
55. Ретрографический датчик по п. 53, в котором неплоские элементы вытянуты перпендикулярно к поверхности подложки.
56. Ретрографический датчик по п. 53, в котором неплоские элементы включают в себя частицы, расположенные на деформируемом слое.
57. Ретрографический датчик по п. 53, в котором неплоские элементы включают в себя стойки, вытянутые от деформируемого слоя.
58. Ретрографический датчик по п. 53, в котором неплоские элементы включают в себя одну или более пирамид и конусов, вытянутых от деформируемого слоя.
59. Ретрографический датчик по п. 53, в котором неплоские элементы включают в себя конические структуры, вытянутые от деформируемого слоя.
60. Способ изготовления ретрографического датчика, содержащий этапы, на которых: обеспечивают подложку из эластомера, способную пропускать изображение; располагают деформируемый слой на первой поверхности подложки, при этом деформируемый слой ненаправленно отражает свет, проходящий через подложку и падающий на первую поверхность подложки; и формируют контактную поверхность на деформируемом слое, при этом контактную поверхность выполняют с возможностью соприкосновения с поверхностью объекта для формирования изображения ретрографическим датчиком, контактная поверхность включает в себя частицы, расположенные в виде структуры на деформируемом слое и отделенные от подложки деформируемым слоем, частицы имеют вторую твердость более высокую, чем твердость подложки.
61. Способ по п. 60, кроме того, содержащий нанесение частиц на деформируемый слой в виде водного раствора полиуретана.
62. Способ по п. 60, в котором по меньшей мере один из эластомера и деформируемого слоя включает в себя придающий клейкость реагент и в котором формирование контактной поверхности включает в себя нанесение слоя частиц на деформируемый слой и полив водного полиуретана на частицы.
63. Способ по п. 60, в котором частицы включают в себя монодисперсные частицы полиметилсилсесквиоксана.
64. Способ по п. 60, в котором частицы включают в себя полидисперсный полиметилсилсесквиоксан.
65. Способ по п. 60, в котором формирование контактной поверхности включает в себя нанесение центрифугированием смеси адгезива и монодисперсных частиц полиметилсилсесквиоксана.
66. Способ метрологии поверхности, содержащий этапы, на которых: обеспечивают ретрографический датчик по одному из пп. 1-52; освещают материал деформируемого слоя источником света со стороны, обращенной к поверхности; осуществляют соприкосновение контактной поверхности с поверхностью объекта для изменения геометрии деформируемого слоя; захватывают изображение деформируемого слоя со стороны, обращенной к подложке, при освещении материала и соприкосновении контактной поверхности с поверхностью объекта; и анализируют изображение для определения трехмерной геометрии поверхности объекта.
67. Способ по п. 66, кроме того, содержащий освещение деформируемого слоя с двух или большего количества различных направлений, захват изображения деформируемого слоя при освещении с каждого из двух или большего количества различных направлений и анализ получающегося множества изображений для определения трехмерной геометрии поверхности объекта.
68. Способ по п. 66, кроме того, содержащий освещение деформируемого слоя одновременно первым источником света первого цвета и вторым источником света второго цвета, отличного от первого цвета.
69. Способ по п. 68, кроме того, содержащий захват многоцветного изображения деформируемого слоя, проведение различия между картиной освещения от первого источника света и второго источника света и анализ многоцветного изображения для определения трехмерной геометрии поверхности объекта на основании картины освещения от первого источника света и второго источника света.
| US 20130033595 А1, 07.02.2013 | |||
| WO 8403855 А, 11.10.1984 | |||
| US 2009315989 A, 19.06.2008 | |||
| US 5798181 А1, 04.10.1994. |

