Изобретение относится к области протезирования конечностей, а именно к устройствам для фиксации экзопротезов к телу человека и предназначено для снижения нежелательных нагрузок на систему экзопротезирования бедра
Экзопротезирование конечностей при помощи остеоинтеграции - относительно новая альтернатива культеприемной гильзе. Ее основная идея заключается в использовании внутренней фиксации компонентов экзопротеза к остаточным костям культи при помощи специализированного имплантата, который соединяется с внешним модулем экзопротеза вне тела человека.
При таком подходе в остаточную кость культи интрамедуллярно имплантируется имплантат. Он чрескожно выходит из конца культи, где жестко закреплен в бедренной кости посредством остеоинтеграции, а к его дистальному концу крепится внешний протез.
Прямое соединение имплантата с внешним протезом несет большие риски появления осложнений, таких как: биомеханическая нестабильность имплантата, возникающая вследствие циклических ударных нагрузок при ходьбе ввиду того, что демпферные системы стандартных протезов предназначены для использования совместно с культеприемной гильзой, а не с имплантатом, интегрированным в кость; перипротезные переломы за счет того, что материал имплантата титан и кость культи имеют значительную разницу в физико-механических свойствах. Эти осложнения могут приводить к удалению всей системы и укорочению культи.
Поэтому для соединения имплантата и протеза необходимо использовать переходники, предохраняющие от чрезмерных нагрузок и обеспечивающие дополнительное демпфирование ударных циклических нагрузок при ходьбе.
Известна съемная система крепления протеза конечности [Releasible attachment system for a prosthetic limb US8246693B2, опубликованная 21.08.1912], содержащая съемную систему соединения с остеоинтегрируемой частью и внешним протезом, при этом система крепления включает в себя предохранительный механизм разблокировки, предназначенный для освобождения или отсоединения при столкновении с чрезмерной механической нагрузкой.
Недостатком данного устройства является то, что при чрезмерной механической нагрузке внешний протез будет высвобожден или оторван, что не является интуитивно понятным действием человеку в критических ситуациях. Высвобождение или отрывание искусственной конечности в критических ситуациях может увеличить вероятность травмирования.
Также недостатком устройства является отсутствие механизма демпфирования ударных нагрузок, возникающих при ходьбе, что может приводить к появлению нестабильности имплантата.
Известно устройство безопасной перегрузки системы прямого костного закрепления [«Safety overload for direct skeletal attachment» US 10369028 B2, опубликованное 06.08.2019], содержащее: проксимальную часть для присоединения к остеоинтегрируемой части; дистальную часть, прикрепляемую к внешнему протезу; подпружиненную защелку для соединения проксимальной и дистальной части, высвобождаемую в ответ на перегрузку протеза конечности.
Недостатком данного устройства является отсутствие демпфирования ударных нагрузок, возникающих при ходьбе, что может приводить к выходу из строя остеоинтегрируемой части.
Наиболее близким техническим решением, принятым за прототип, является «Съемная система крепления для протеза конечности» [«Releasable attachment system for a prosthetic limb» US 20120310371 A1, опубликованная 06.11.2012] содержащая: систему соединения с остеоинтегрируемой частью и внешним протезом и механизм предотвращения чрезмерных нагрузок, образованный шаровым шарниром, где обеспечение порога срабатывания устройства выполняют подпружиненные элементы.
Недостатком данного устройства является отсутствие демпфирования ударных нагрузок при ходьбе, что может приводить к появлению механической нестабильности имплантата.
Задача изобретения состоит в разработке устройства, обеспечивающего снижение нежелательных нагрузок на систему экзопротезирования бедра, а именно содержащего механизмы предохранения от чрезмерного скручивания и изгиба, а также механизма демпфирования ударных нагрузок, возникающих при ходьбе, лишенного вышеперечисленных недостатков.
Результат изобретения достигается за счет того, что что переходник имеет четыре модуля - замковый модуль, модуль для предотвращения чрезмерных скручивающих нагрузок на имплантат, модуль для предотвращения чрезмерных изгибающих нагрузок и модуль для демпфирования ударных нагрузок при ходьбе, которые располагаются внутри корпуса один над другим, корпус состоит из проксимальной и дистальной частей, соединенных между собой осью вращения, которая работает по оси сгибания коленного сустава и представляет собой цилиндрический шарнир с амплитудой вращения 60 градусов, в проксимальной части корпуса снизу выполнен выступ, а в дистальной части сверху выполнена ответная часть для выступа проксимальной части, при этом на наружной поверхности выступа выполнены углубления, в стенках глухого отверстия выполнен паз, пирамидальный адаптер для соединения с экзопротезом выполнен на нижней поверхности дистальной части корпуса со стороны соединения с протезом, замковый модуль состоит из замка для осевой фиксации имплантата в корпусе, установочных винтов, пружин и регулирововчных винтов для пружин, замок для осевой фиксации имплантата в корпусе содержит наружную скобу, параллельные пазы и цилиндрическую прорезь, причем округлая часть прорези совпадает по диаметру с упомянутым глухим отверстием, при этом наружная нажимная скоба имеет возможность выхода из упомянутого паза в стенке глухого отверстия, тело замка округлой частью прорези имеет возможность вхождения в круговой паз дистальной части имплантата с ограничением осевых поступательных движений, при возможности осевых вращательных движений имплантата, относительно корпуса, замок для осевой фиксации имплантата имеет возможность поступательного движения, ход которого ограничивается установочными винтами, последние установлены в проксимальную часть корпуса и проходят в параллельные пазы замка с возможностью фиксации имплантата в корпусе или отсутствием такой фиксации в крайних положениях хода замка, пружины замка выполнены напротив скобы и обеспечивают постоянную фиксацию дистального конца имплантата в корпусе, а при нажатии на наружную скобу обеспечивают разъединение имплантата и переходника, модуль для предотвращения чрезмерных скручивающих нагрузок на имплантат расположен в проксимальной части корпуса и состоит из стакана для имплантата, упоров, пружин и винтов, стакан расположен в нижней части упомянутого глухого отверстия с возможностью образования цилиндрического шарнира, работающего в вертикальной оси, на внешнем контуре стакана выполнены углубления для захода шести упоров, подпружиненных шестью пружинами и закрытых установочными винтами с возможностью натяжения пружин и фиксации вращения стакана вместе с имплантатом, модуль для предотвращения чрезмерных изгибающих нагрузок расположен в дистальной части корпуса и состоит из упоров, пружин и регулировочных винтов, причем упоры, подпружиненные шестью пружинами и закрытые шестью установочными винтами, имеют возможность входа в углубления на наружной поверхности выступа проксимальной части корпуса для возможности фиксации вращения шарнира проксимальной и дистальной частей корпуса, модуль для демпфирования ударных нагрузок при ходьбе расположен внутри дистальной части корпуса и состоит из пружины, работающей по вертикальной оси и слайдера, при этом дистальная часть корпуса выполнена из двух частей с зазором и имеет возможность раздвигаться и сдвигаться вдоль своей оси.
Технический результат состоит в обеспечении демпфирования ударных нагрузок, возникающих при ходьбе, повышении биомеханической стабильности имплантата, а также в обеспечении предохранения от периимплантных переломов, возникающих при чрезмерных нагрузках.
Корпус переходника состоит из двух частей, образующих цилиндрический шарнир в оси сгибания колена и представляющий из себя механизм предотвращения чрезмерных изгибающих нагрузок. Шарнир имеет настраиваемый порог нагрузки, обеспечиваемый упорами, пружинами и винтами, до достижения которого блокируются все движения в нем. При чрезмерной нагрузке выше заданного порога корпус может раскладываться в плоскости сгибания колена, обеспечивая предупреждение возникновения чрезмерных нагрузок на изгиб в плоскости коленного сустава, приводящих к периимплантным переломам.
Корпус содержит стакан, в котором закрепляется имплантат при помощи замка, при этом стакан и корпус образуют цилиндрический шарнир, работающий в вертикальной оси, а это обеспечивает предотвращение чрезмерных скручивающих нагрузок. Шарнир имеет настраиваемый порог нагрузки, обеспечиваемый упорами, пружинами и винтами, до достижения которого блокируются все движения в нем. При чрезмерной нагрузке более заданного порога стакан может проворачиваться вместе с имплантатом в вертикальной оси по отношению к корпусу изобретения, обеспечивая предупреждение возникновения чрезмерных скручивающих нагрузок, приводящих к периимплантным переломам.
Переходник занимает важное место в составе остеоинтегративной системы экзопротезирования бедра, так как выполняет функцию соединения имплантата с внешним протезом бедра и повышает биомеханическую стабильность имплантата за счет демпфирования осевых нагрузок и предохранения от перипротезных переломов. Демпфирование нагрузок обеспечивается расположением в дистальной части корпуса пружины и слайдера, которые работают по вертикальной оси и при нагрузке сдвигают две части дистальной части корпуса, а при ослаблении нагрузки - раздвигают их.
Сущность изобретения поясняется следующими чертежами.
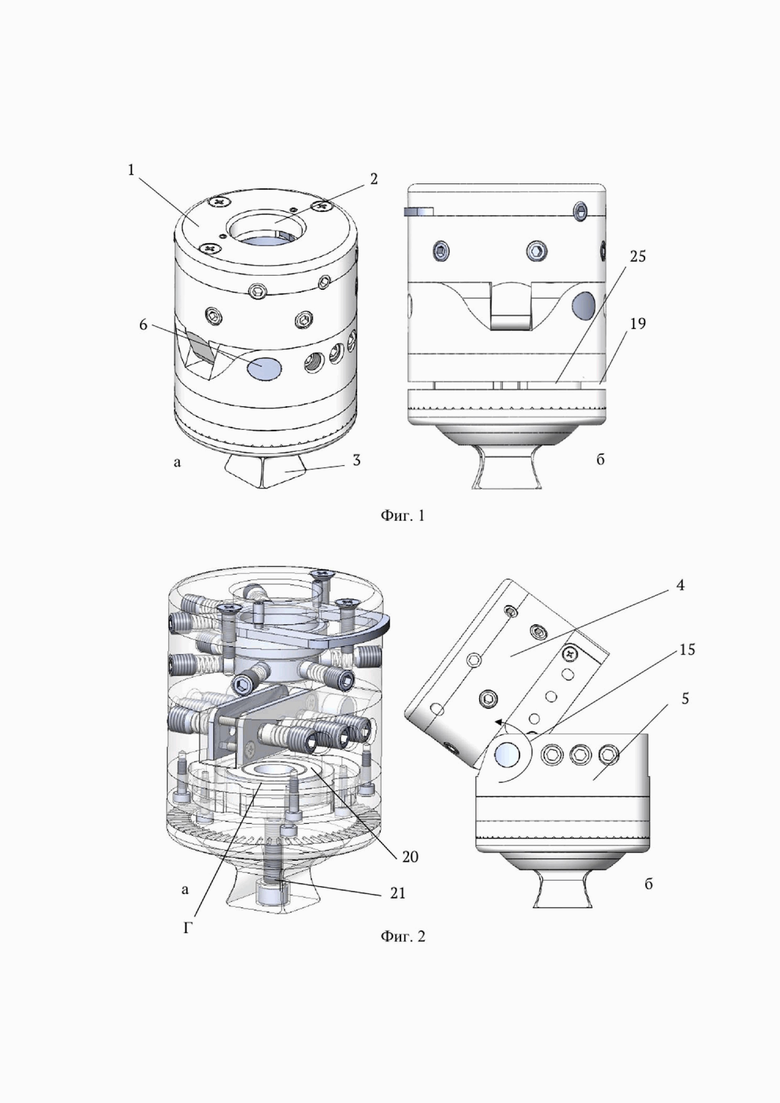
На фиг. 1 показан изометрический (А) и фронтальный вид (Б) на переходник остеоинтегративной системы экзопротезирования бедра.
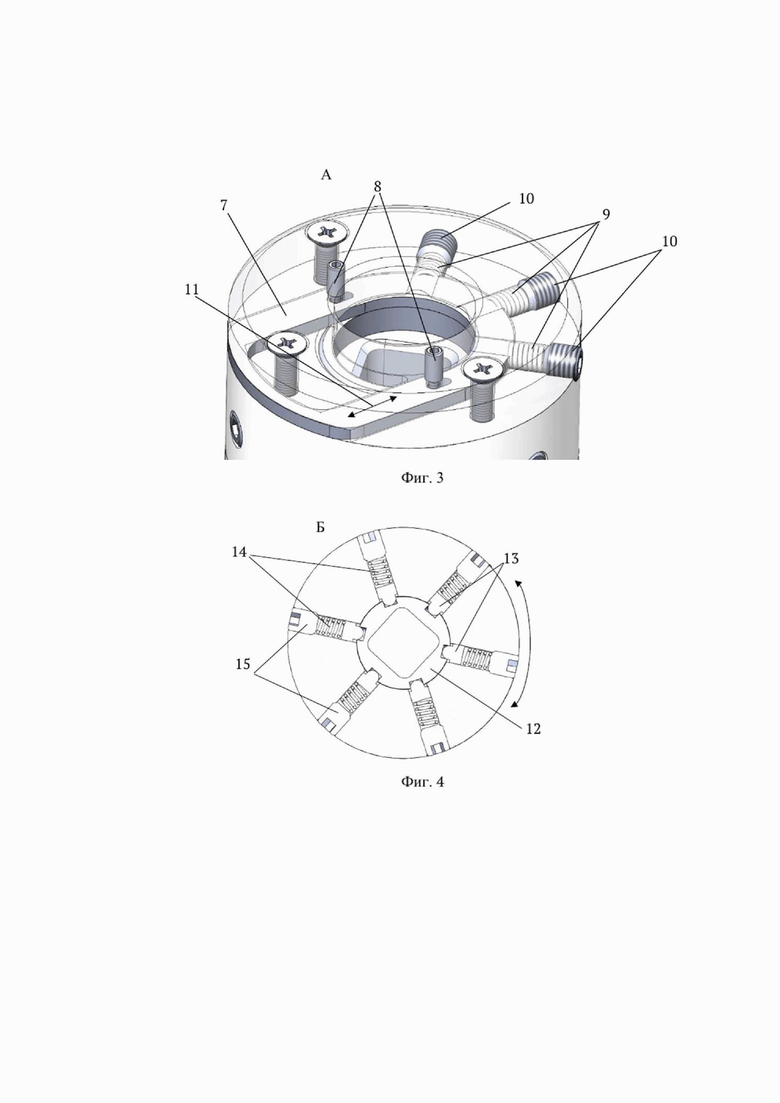
На фиг. 2 показан изометрический прозрачный вид А и боковой вид Б в моменте срабатывания механизма предохранения от чрезмерных изгибающих нагрузок на переходник.
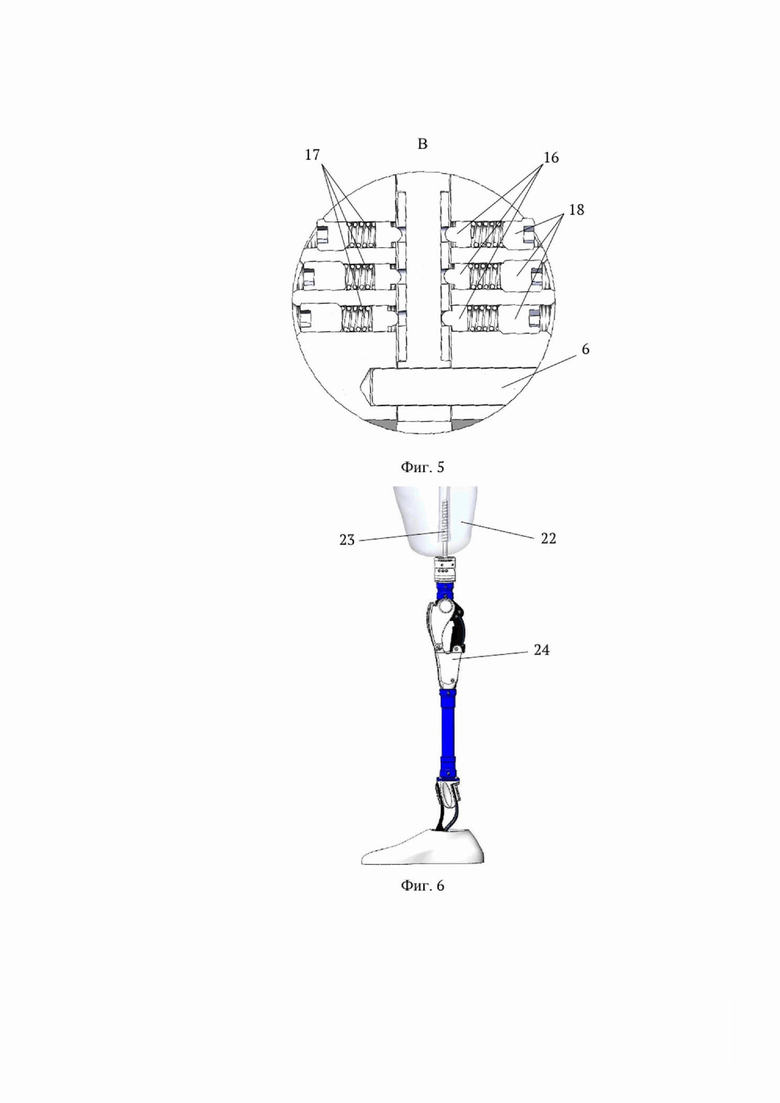
На фиг. 3 показан вид на механизм фиксации имплантата.
На фиг. 4 показан разрез механизма предохранения системы от чрезмерных скручивающих нагрузок.
На фиг. 5 показан разрез механизма предохранения системы от чрезмерных изгибающих нагрузок.
На фиг. 6 показан общий вид на полезную модель в составе остеоинтегративной системы экзопротезирования бедра.
Переходник (Фиг. 1, 2, 3) состоит из корпуса 1 цилиндрической формы с расположенными в нем 1 модулями А-Г. Корпус 1 состоит из проксимальной 4 и дистальной 5 частей, соединенных между собой осью вращения 6, которая 6 представляет собой цилиндрический шарнир с амплитудой вращения 60 градусов. (фиг. 2, Б). Ось вращения 6 работает по оси сгибания коленного сустава. Наружная стенка проксимальной части 4 на уровне шарнира 6 скошена под углом 60 градусов. Упорная площадка на дистальной части 5 для шарнира 6 выполнена перпендикулярно оси корпуса 1.
Для адаптации обеих частей 4, 5 корпуса 1 в проксимальной части 4 снизу выполнен выступ, а в дистальной части 5 сверху выполнена ответная часть, в которую установлен упомянутый выступ проксимальной части 4.
На верхней поверхности проксимальной части 4 корпуса 1 со стороны соединения с имплантатом выполнено глухое отверстие 2 для адаптации с дистальной частью остеоинтегрируемого имплантата. В стенках отверстия 2 выполнен паз для размещения внутренней части замка 7 (округлой части прорези замка 7). Ширина паза отверстия 2 и толщина замка 7 совпадают. Диаметр округлой части прорези замка 7 и паза отверстия 2 совпадают.
На нижней поверхности дистальной части 5 корпуса 1 со стороны соединения с протезом выполнен пирамидальный адаптер 3.
Проксимальная часть 4 и дистальная часть 5 корпуса 1 разделены на несколько деталей, скрепленных крепежом, для обеспечения технологичности и удобства сборки (фиг.2, А).
Дистальная часть 5 состоит из двух частей, с зазором между ними.
Если рассмотреть изобретение системно, то внутри корпуса 1, один над другим, располагаются четыре модуля А-Г, выполняющих различные функции.
Отверстие 2 является глухим и заканчивается в модуле Б. В отверстие 2 вставлен имплантат 23 и закреплен в нем 2 с помощью замка 7, а к пирамидальному адаптеру 3 прикреплен экзопротез (фиг. 6), тем самым соединяя имплантат и экзопротез бедра, образуя остеоинтегративную систему экзопротезирования бедра. Глубина отверстия 2 соответствует длине дистальной присоединительной части имплантата 23.
Модуль А (фиг. 3) состоит из замка 7, установочных винтов 8, пружин 9 и установочных винтов 10. Замок 7 содержит цилиндрическую прорезь, причем округлая часть прорези совпадает по диаметру с отверстием 2 и входит в его 2 паз. Замок 7 является поступательно-двигающейся кулисой и предназначен для осевой фиксации имплантата в корпусе 1 и имеющей ход в 2 мм, который ограничивается установочными винтами 8. Винты 8 установлены в проксимальную часть 4 корпуса 1 и проходят 8 в параллельные пазы замка 7, длина пазов замка 7 равна 2 мм. В дистальной части имплантата 23 выполнен круговой паз, в который входит тело замка 7 округлой частью прорези, ограничивая осевые поступательные движения, но позволяя осуществлять осевые вращательные движения имплантата, относительно корпуса 1, за счет того, что тело замка 7 соприкасается с круговым пазом только верхней и нижней поверхностью. В крайних положениях хода замка 7, он 7 либо фиксирует имплантат в корпусе 1, либо нет. Замок 7 подпружинен тремя пружинами 9, сила натяжения которых регулируется установочными винтами 10. Пружины 9 замка 7 выполнены напротив скобы 11.
На уровне замка 7 в стенке проксимальной части 4 корпуса 1 выполнен паз для выхода наружной части замка 7 - его скобы 11.
Модуль Б расположен в проксимальной части 4 корпуса 1 и предназначен для предотвращения чрезмерных скручивающих нагрузок на имплантат. Механизм Б состоит из стакана 12, упоров 13, пружин 14 и винтов 15. Стакан 12 расположен на дне (в нижней части) глухого отверстия 2 и они 2, 12 вместе образуют цилиндрический шарнир, работающий в вертикальной оси. При соединении имплантата с переходником имплантат фиксируется в стакане 12, за счет замка 7, модуля А, после чего может вращаться только вместе со стаканом 12. При чрезмерной нагрузке стакан 12 вращается в вертикальной оси относительно проксимальной части 4 корпуса 1 (фиг.4).
На внешнем контуре стакана 12 выполнены углубления, куда заходят шесть упоров 13, подпружиненные шестью пружинами 14 и закрытые шестью установочными винтами 15, обеспечивающими натяжение пружин и фиксацию вращения стакана 12 вместе с имплантатом при нормальных нагрузках
Модуль В расположен в дистальной части 5 корпусе 1 и предназначен для предотвращения чрезмерных изгибающих нагрузок.
Модуль В состоит из упоров 16, пружин 17 и винтов 18.
Упоры 16, подпружиненные шестью пружинами 17 и закрытые шестью установочными винтами 18, входят в углубления на наружной поверхности выступа проксимальной части 4 корпуса 1, обеспечивая фиксацию вращения шарнира 6 проксимальной 4 и дистальной 5 частей корпуса 1 при нормальных нагрузках.
Модуль Г (фиг. 5) также расположен внутри дистальной части 5 корпуса 1 и предназначен для демпфирования ударных нагрузок, возникающих при ходьбе. Модуль Г состоит из пружины 20, работающей по вертикальной оси и слайдера. Вместе с пружиной функцию демпфирования обеспечивает и то, что дистальная часть 5 корпуса 1 может раздвигаться и сдвигаться на 2 мм вдоль своей оси (фиг. 1, Б, 19) за счет установленного внутри слайдера 25 (фиг.1).
Пирамидальный адаптер 3 соединен с дистальной частью 5 корпуса 1 шлицевым соединением, которое сцепляется винтом 21. При необходимости пирамидальный адаптер 3 может поворачиваться по своей оси при ослаблении винта 21. Его поворот обеспечивает изменение угла стопы протеза относительно пациента.
В составе остеоинтегративной системы экзопротезирования бедра переходник соединяет имплантат 23, имплантированный в культю 22, с экзопротезом 24 (фиг. 6).
Работает переходник следующим образом:
Для соединения переходника с имплантатом, имплантированного в культю (фиг. 6, 22), в проксимальное отверстие 2 вставляют имплантат. Замок 7 блокирует осевое перемещение имплантата 23, но не вращение (блокировка вращения имплантата обеспечивается стаканом 12). Замок 7 подпружинен тремя пружинами 9, сила натяжения которых обеспечивает постоянную фиксацию дистального конца имплантата 23 в корпусе 1 (фиг. 3). Сначала нажимают на скобу 11 замка 7, тем самым сдвигая замок 7, вставляют дистальный конец имплантата 23 так, чтобы он достиг дна стакана 12, затем отпускают скобу 11 и силой пружин 9, часть тела замка 7 заходит в круговой паз имплантата 23, чем фиксирует его 23 от поступательных осевых движений.
При необходимости разъединения имплантата 23 и переходника необходимо нажать на скобу 11 замка 7, тем самым сдвигая замок 7 в перпендикулярно оси (Фиг. 3, 11) имплантата 23, и разъединить переходник и имплантат 23.
К пирамидальному адаптеру 3 (фиг. 1), прикрепляется внешний протез 26 (фиг. 6) путем фиксации в стандартном разъёме пирамидального адаптера.
При первом использования переходника настраивают положение пирамидального адаптера 3, для этого ослабляют винт 21, затем поворачивают пирамидальный адаптер в нужное положение, далее затягивают винт 21.
В собранном виде (фиг.6) пациент может использовать протез для ходьбы.
Во время ходьбы в фазе удара пятки о поверхность (фиг. 1, Б) дистальная часть 5 корпуса 1 сжимается 19 на 2 мм, при этом сжимается пружина 20, демпфируя шаг пациента. При снятии нагрузки в момент фазы переноса ноги дистальная часть 5 корпуса 1 раздвигается 19 на 2 мм, пружина 20 разжимается, после чего демпфирование может повториться.
Для обеспечения адекватного срабатывания механизмов предохранения модулей Б и В, в зависимости от веса пациента и его уровня активности настраивают пороги срабатывания систем предохранения от чрезмерных нагрузок. Для этого в модуле Б регулируют глубину вкручивания винтов 15, а в модуле В - винтов 18. При вкручивании винтов пружины механизмов все сильнее сжимаются, повышая порог срабатывания системы.
После регулировки порога срабатывания проводят серию тестов для определения нормальной работы переходника. Модули Б и В не должны срабатывать при нормальной физической активности пациента.
В экстремальных случаях при чрезмерном скручивании имплантата 23 пружинам 14 не хватает усилия прижима упоров 13 к углублениям в стакане 12 для предотвращения проворота стакана 12 (фиг. 4). Стакан 12 с установленным в него имплантатом 23 проворачивается вокруг своей оси (фиг. 4), выталкивая подпружиненные упоры 13 из углублений, тем самым сжимая пружины 14. Поворот стакана 12 обеспечивает снятие напряжений на остеоинтегрируемую часть.
В экстремальных случаях при чрезмерном изгибании в плоскости сгибания коленного сустава пружинам 17 не хватает усилия прижима упоров 16 к углублениям в выступе проксимальной части 4 корпуса 1 сохранять проксимальную 4 и дистальную 5 части корпуса 1 в неподвижности относительно друг друга. Вследствие этого проксимальная часть 4 корпуса 1 поворачивается относительно дистальной части 5 корпуса 1 по оси 6 (фиг. 2, Б, 15), раздвигая упоры 16, сжимая пружины 17, наружная стенка проксимальной части 4 на уровне шарнира 6 упирается в упорную площадку на дистальной части 5, обеспечивая тем самым предотвращение возникновения чрезмерных нагрузок такого типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКОНСТРУКЦИИ ПРОКСИМАЛЬНОЙ ЧАСТИ БЕДРЕННОЙ КОСТИ ДЛЯ ЭКЗОПРОТЕЗИРОВАНИЯ С ТАЗОБЕДРЕННЫМ СУСТАВОМ И ИМПЛАНТАТ (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2819998C2 |
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ | 2023 |
|
RU2823055C1 |
| ТОРСИОННОЕ УСТРОЙСТВО ЭКЗОПРОТЕЗА | 2002 |
|
RU2245691C2 |
| ВСТАВНОЙ УЗЕЛ СТОПЫ ПРОТЕЗА | 2020 |
|
RU2805199C2 |
| ВСТАВКА ДЛЯ ПРОТЕЗА СТОПЫ | 2020 |
|
RU2814526C2 |
| ЭНДОПРОТЕЗ ТАЗОБЕДРЕННОГО СУСТАВА | 2003 |
|
RU2265418C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ОРИЕНТИРА | 2010 |
|
RU2568739C2 |
| АДАПТЕР ПРОТЕЗА БЕДРА | 2019 |
|
RU2775127C1 |
| КОНСТРУКЦИЯ ВНУТРИКОСТНОГО ДЕНТАЛЬНОГО ИМПЛАНТАТА | 1998 |
|
RU2178682C2 |
| ПРОТЕЗ ТАЗОБЕДРЕННОГО СУСТАВА | 2001 |
|
RU2207085C1 |
Изобретение относится к медицине. Переходник остеоинтегративной системы экзопротезирования бедра содержит корпус с глухим отверстием для соединения имплантата и пирамидальный адаптер для соединения с экзопротезом. Переходник имеет четыре модуля - замковый модуль, модуль для предотвращения чрезмерных скручивающих нагрузок на имплантат, модуль для предотвращения чрезмерных изгибающих нагрузок и модуль для демпфирования ударных нагрузок при ходьбе, которые располагаются внутри корпуса один над другим. Корпус состоит из проксимальной и дистальной частей, соединенных между собой осью вращения, которая работает по оси сгибания коленного сустава и представляет собой цилиндрический шарнир с амплитудой вращения 60 градусов. В проксимальной части корпуса снизу выполнен выступ, а в дистальной части сверху выполнена ответная часть для выступа проксимальной части, при этом на наружной поверхности выступа выполнены углубления. В стенках глухого отверстия выполнен паз. Пирамидальный адаптер для соединения с экзопротезом выполнен на нижней поверхности дистальной части корпуса со стороны соединения с протезом. Замковый модуль состоит из замка для осевой фиксации имплантата в корпусе, установочных винтов, пружин и регулировочных винтов для пружин. Замок для осевой фиксации имплантата в корпусе содержит наружную скобу, параллельные пазы и цилиндрическую прорезь. Округлая часть прорези совпадает по диаметру с упомянутым глухим отверстием. Наружная нажимная скоба имеет возможность выхода из упомянутого паза в стенке глухого отверстия. Тело замка округлой частью прорези имеет возможность вхождения в круговой паз дистальной части имплантата с ограничением осевых поступательных движений, при возможности осевых вращательных движений имплантата, относительно корпуса. Замок для осевой фиксации имплантата имеет возможность поступательного движения, ход которого ограничивается установочными винтами, последние установлены в проксимальную часть корпуса и проходят в параллельные пазы замка с возможностью фиксации имплантата в корпусе или отсутствием такой фиксации в крайних положениях хода замка. Пружины замка выполнены напротив скобы и обеспечивают постоянную фиксацию дистального конца имплантата в корпусе, а при нажатии на наружную скобу обеспечивают разъединение имплантата и переходника. Модуль для предотвращения чрезмерных скручивающих нагрузок на имплантат расположен в проксимальной части корпуса и состоит из стакана для имплантата, упоров, пружин и винтов. Стакан расположен в нижней части упомянутого глухого отверстия с возможностью образования цилиндрического шарнира, работающего в вертикальной оси. На внешнем контуре стакана выполнены углубления для захода шести упоров, подпружиненных шестью пружинами и закрытых установочными винтами с возможностью натяжения пружин и фиксации вращения стакана вместе с имплантатом. Модуль для предотвращения чрезмерных изгибающих нагрузок расположен в дистальной части корпуса и состоит из упоров, пружин и регулировочных винтов. Упоры, подпружиненные шестью пружинами и закрытые шестью установочными винтами, имеют возможность входа в углубления на наружной поверхности выступа проксимальной части корпуса для возможности фиксации вращения шарнира проксимальной и дистальной частей корпуса. Модуль для демпфирования ударных нагрузок при ходьбе расположен внутри дистальной части корпуса и состоит из пружины, работающей по вертикальной оси, и слайдера. Дистальная часть корпуса выполнена из двух частей с зазором и имеет возможность раздвигаться и сдвигаться вдоль своей оси. Изобретение обеспечивает демпфирование ударных нагрузок, возникающих при ходьбе, повышение биомеханической стабильности имплантата, а также обеспечение предохранения от периимплантных переломов, возникающих при чрезмерных нагрузках. 6 ил.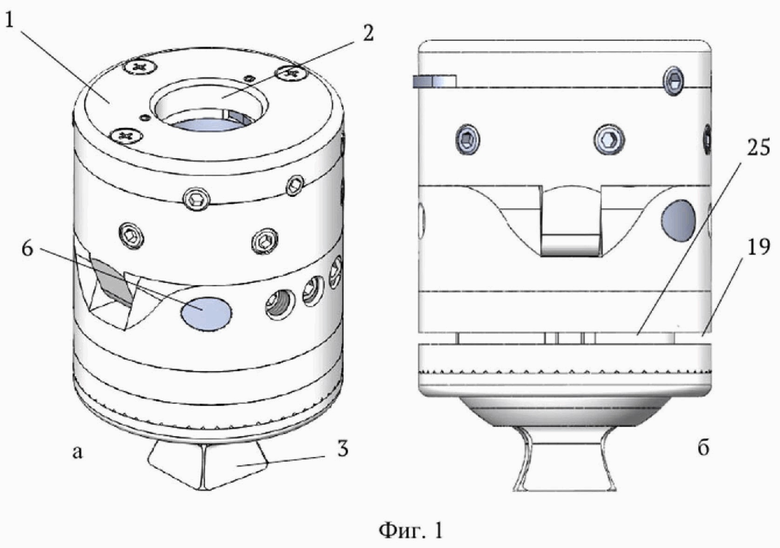
Переходник остеоинтегративной системы экзопротезирования бедра, содержащий корпус с глухим отверстием для соединения имплантата и пирамидальный адаптер для соединения с экзопротезом, отличающийся тем, что переходник имеет четыре модуля - замковый модуль, модуль для предотвращения чрезмерных скручивающих нагрузок на имплантат, модуль для предотвращения чрезмерных изгибающих нагрузок и модуль для демпфирования ударных нагрузок при ходьбе, которые располагаются внутри корпуса один над другим, корпус состоит из проксимальной и дистальной частей, соединенных между собой осью вращения, которая работает по оси сгибания коленного сустава и представляет собой цилиндрический шарнир с амплитудой вращения 60 градусов, в проксимальной части корпуса снизу выполнен выступ, а в дистальной части сверху выполнена ответная часть для выступа проксимальной части, при этом на наружной поверхности выступа выполнены углубления, в стенках глухого отверстия выполнен паз, пирамидальный адаптер для соединения с экзопротезом выполнен на нижней поверхности дистальной части корпуса со стороны соединения с протезом, замковый модуль состоит из замка для осевой фиксации имплантата в корпусе, установочных винтов, пружин и регулировочных винтов для пружин, замок для осевой фиксации имплантата в корпусе содержит наружную скобу, параллельные пазы и цилиндрическую прорезь, причем округлая часть прорези совпадает по диаметру с упомянутым глухим отверстием, при этом наружная нажимная скоба имеет возможность выхода из упомянутого паза в стенке глухого отверстия, тело замка округлой частью прорези имеет возможность вхождения в круговой паз дистальной части имплантата с ограничением осевых поступательных движений, при возможности осевых вращательных движений имплантата, относительно корпуса, замок для осевой фиксации имплантата имеет возможность поступательного движения, ход которого ограничивается установочными винтами, последние установлены в проксимальную часть корпуса и проходят в параллельные пазы замка с возможностью фиксации имплантата в корпусе или отсутствием такой фиксации в крайних положениях хода замка, пружины замка выполнены напротив скобы и обеспечивают постоянную фиксацию дистального конца имплантата в корпусе, а при нажатии на наружную скобу обеспечивают разъединение имплантата и переходника, модуль для предотвращения чрезмерных скручивающих нагрузок на имплантат расположен в проксимальной части корпуса и состоит из стакана для имплантата, упоров, пружин и винтов, стакан расположен в нижней части упомянутого глухого отверстия с возможностью образования цилиндрического шарнира, работающего в вертикальной оси, на внешнем контуре стакана выполнены углубления для захода шести упоров, подпружиненных шестью пружинами и закрытых установочными винтами с возможностью натяжения пружин и фиксации вращения стакана вместе с имплантатом, модуль для предотвращения чрезмерных изгибающих нагрузок расположен в дистальной части корпуса и состоит из упоров, пружин и регулировочных винтов, причем упоры, подпружиненные шестью пружинами и закрытые шестью установочными винтами, имеют возможность входа в углубления на наружной поверхности выступа проксимальной части корпуса для возможности фиксации вращения шарнира проксимальной и дистальной частей корпуса, модуль для демпфирования ударных нагрузок при ходьбе расположен внутри дистальной части корпуса и состоит из пружины, работающей по вертикальной оси, и слайдера, при этом дистальная часть корпуса выполнена из двух частей с зазором и имеет возможность раздвигаться и сдвигаться вдоль своей оси.
| US 20120310371 A1, 06.12.2012 | |||
| 0 |
|
SU185647A1 | |
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ПРИГОТОВЛЕНИЯ ЗОЛОШЛАКОВОГО БЕТОНА | 2011 |
|
RU2479532C2 |
| DE 102020108005 B4, 14.10.2021 | |||
| US 20170252166 A1, 07.09.2017 | |||
| WO 2011037458 A1, 31.03.2011 | |||
| DE 10247397 B3, 08.01.2004. | |||

