[0001] Данная заявка является частичным продолжением заявки США № 12/547,716, поданной 26 августа 2009 г., и претендует на приоритет предварительной заявки США № 61/173,069, поданной 27 апреля 2009 г. Полное содержание предварительной заявки США № 61/173,069 включено в данное описание посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ ОБЛАСТЬ ТЕХНИКИ
[0002] Изобретение относится к обнаружению скрытых ориентиров на ортопедических имплантатах.
УРОВЕНЬ ТЕХНИКИ
[0003] Применение блокирующего стержня значительно расширило возможности для внутрикостной фиксации при переломах длинных костей. Закрепление внутрикостного стержня в кости придает конструкции дополнительную устойчивость в продольном направлении и предотвращает вращение стержня в кости. Обычные хирургические операции по закреплению внутрикостного стержня для определения местоположения и сверления дистальных винтовых отверстий, а также для установки в винтовых отверстиях винтов предусматривают комбинированное использование колодок, рентгенографического исследования и неавтоматического визуального контроля.
[0004] Проведение внутрикостной фиксации с помощью стержня предусматривает установку во внутрикостный канал стержня с целью взаимной фиксации концов перелома. Обычно сначала выполняют проксимальную блокировку, как правило, посредством колодки. Однако деформация стержня при установке внутри кости может привести к неточности колодки по отношению к дистальным винтам. При этом расположение дистальных блокирующих винтов и выравнивание сверла для сверления дистальных винтовых отверстий является наиболее трудоемким и затруднительным этапом при проведении имплантации. Двумя основными причинами нарушения дистальной блокировки являются (1) неверная точка входа на кости и (2) неверная ориентация сверла. При возникновении одной из указанных проблем сверло не будет проходить сквозь стержневое отверстие. Неверное положение точки ввода усугубляет проблему, поскольку скругленный кончик сверла часто соскальзывает, повреждая здоровую кость, что усложняет изготовление другого отверстия вблизи неточно выполненного отверстия. Неверное выполнение дистальной блокировки может привести преждевременному выходу из строя с поломкой стержня, введенного через стержневое отверстие, поломкой винта или обламыванием сверла внутри кости.
[0005] Неавтоматизированные способы являются наиболее распространенным и общепринятым средством для визуальной наметки дистальных винтовых отверстий. В большинстве неавтоматизированных методов дистального наведения для направления сверла применяют направляющую трубку или цилиндрическую втулку. Механизмы выравнивания направляющей трубки и удержания ее на месте различны. Иногда для обеспечения устойчивости сверла хирург использует разрезанную продольно пополам или целую направляющую трубку. В обоих случаях хирургу необходимо выполнить надрез и ввести через разрез сверло. Неавтоматизированные способы основаны, в первую очередь, на мастерстве хирурга, и при их осуществлении применяют рентгенографию и механические колодки.
[0006] Другим способом получения указанного результата с использованием удлиненных стержней является способ "идеальных окружностей" с применением Сообразного штатива. При этом пациента и С-образный штатив ориентируют таким образом, чтобы при рентгеноскопическом наблюдении имплантата отверстие, через которое должен пройти винт, имело вид окружности. Если С-образный штатив расположен не перпендикулярно отверстию, то отверстие выглядит удлиненным или отверстия вообще не видно.
[0007] Существует потребность в улучшении системы и способа для точного и надежного наведения на ориентиры медицинских имплантатов. Кроме того, существует потребность в обеспечении точного размещения дистальных блокирующих винтов и выравнивания сверла при высверливании дистальных винтовых отверстий. Помимо этого, существует потребность в улучшении системы наведения на ориентиры, компоненты которой можно легко стерилизовать или обработать в автоклаве для повторного использования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] Один из основных аспектов изобретения относится к системе обнаружения ориентиров, содержащей генератор поля для генерации электромагнитного поля и идентификатор ориентиров. Генератор поля и идентификатор ориентиров размещены в общем корпусе, при этом генератор поля, идентификатор ориентиров и общий корпус выполнены автоклавируемыми. Кроме того, система содержит ортопедический имплантат, расположенный в электромагнитном поле и содержащий по меньшей мере один ориентир. На заданном расстоянии от указанного по меньшей мере одного ориентира расположен первый магнитный датчик, при этом сигналы от первого датчика и идентификатора ориентира сравнивают посредством процессора, использующего значение заданного расстояния для вычисления положения идентификатора ориентира относительно указанного по меньшей мере одного ориентира.
[0009] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, в качестве ориентира можно выбрать элемент из группы, содержащей конструктивный элемент, отверстие, полость, выпуклость, канал, стопор, канавку, выступ, стенку, ступень, выемку, скважину, углубление, лунку, желобок, зазор, вырез, вход, проход, прорезь и щель. Ортопедический имплантат может представлять собой внутрикостный стержень. Ортопедический имплантат имеет наружную поверхность и внутреннюю поверхность, образующие трубчатую полость, при этом первый датчик прикреплен к дистальному участку зонда, заходящего в трубчатую полость. В некоторых вариантах осуществления общий корпус вмещает также вращающий сверло двигатель, присоединяемый к сверлу. Корпус может содержать сверлильную втулку. Корпус может иметь форму диска. Сверло выступает наружу перпендикулярно дискообразному корпусу. Кроме того, система может содержать отсоединяемую установочную рукоятку, присоединенную к ортопедическому имплантату. К имплантату можно присоединить регулируемый стопор, содержащий прорезь, сквозь которую проходит зонд. Регулируемый стопор содержит зажимное приспособление для удержания зонда в фиксированном положении. Зонд может содержать множество меток, расположенных друг от друга на некотором расстоянии, при этом регулируемый стопор может содержать зажимное приспособление для удержания зонда в фиксированном положении на метке или между двумя метками.
[0010] Другой основной аспект изобретения относится к обнаружению ориентира, содержащему обеспечение наличия модуля ортопедического имплантата, снабженного по меньшей мере одним ориентиром, имплантацию модуля ортопедического имплантата в тело пациента и установку в имплантате зонда. Зонд содержит электромагнитный датчик. Обнаружение ориентира может дополнительно содержать генерацию электромагнитного поля, охватывающего датчик и ориентир, обнаружение указанного по меньшей мере одного ориентира посредством идентификатора ориентира, установку трансфиксационного элемента по меньшей мере в одном ориентире и удаление зонда. Идентификатор ориентира расположен в автоклавируемом корпусе.
[0011] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, ориентир выбран из группы, содержащей конструктивный элемент, отверстие, полость, выпуклость, канал, стопор, канавку, выступ, стенку, ступень, выемку, скважину, углубление, лунку, желобок, зазор, вырез, вход, проход, прорезь и щель Ортопедический имплантат может представлять собой внутрикостный стержень. Ортопедический имплантат имеет наружную поверхность и внутреннюю поверхность, образующие трубчатую полость, при этом обнаружение ориентира дополнительно содержит установку в дистальный участок зонда первого датчика, заходящего в трубчатую полость, Генератор поля и идентификатор ориентира расположены в общем автоклавируемом корпусе, причем обнаружение ориентира также содержит обработку корпуса в автоклаве. Генератор поля и идентификатор ориентира расположены в общем автоклавируемом корпусе, который также может вмещать вращающий сверло двигатель, соединенный со сверлом, причем обнаружение ориентира также содержит обработку в автоклаве корпуса и сверла. Корпус может содержать сверлильную втулку. Корпус можно выполнить в форме диска. Обнаружение ориентира также содержит присоединение к ортопедическому имплантату, с возможностью отсоединения, установочной рукоятки и/или закрепление зонда в фиксированном положении. Зонд содержит несколько отстоящих на расстоянии друг от друга меток, при этом зонд закреплен в фиксированном положении на метке или между метками.
[0012] Другой основной аспект изобретения относится к системе обнаружения ориентиров, содержащей автоклавируемый корпус, вмещающий генератор поля для генерации электромагнитного поля, идентификатор ориентиров и вращающий сверло двигатель. Ортопедический имплантат расположен в электромагнитном поле и снабжен по меньшей мере одним ориентиром. Зонд содержит первый электромагнитный датчик, размещенный в пределах ортопедического имплантата на заданном расстоянии по меньшей мере от одного ориентира. Также предусмотрен процессор, предназначенный для сравнения сигналов от первого датчика и идентификатора ориентира и использующий значение заданного расстояния для вычисления положения идентификатора ориентира относительно указанного по меньшей мере одного ориентира. Первый электромагнитный датчик подсоединен к процессору через зонд.
[0013] Другой основной аспект изобретения относится к набору для обнаружения ориентиров на медицинских имплантатах, содержащему автоклавируемый корпус, вмещающий генератор поля для генерации электромагнитного поля и идентификатор ориентиров. Также предусмотрено наличие множества ортопедических имплантатов, один из которых расположен внутри электромагнитного поля. Каждый ортопедический имплантат снабжен по меньшей мере одним ориентиром. Предусмотрено наличие множества зондов, каждый из которых содержит электромагнитный датчик. Один из зондов выбирают исходя из размеров имплантата, расположенного в электромагнитном поле. Выбранный зонд размещен в пределах имплантата в электромагнитном поле и находится на заданном расстоянии по меньшей мере от одного ориентира. Предусмотрено наличие процессора, предназначенного для сравнения сигналов от первого датчика и идентификатора ориентира, и использующий значение заданного расстояния для вычисления положения идентификатора ориентира относительно указанного по меньшей мере одного ориентира, причем первый электромагнитный датчик подсоединен к процессору через зонд.
[0014] Другой основной аспект изобретения относится к системе наведения на ориентир ортопедического имплантата, содержащей автоклавируемый корпус, расположенный в указанном корпусе генератор поля для генерации электромагнитного поля, первый электромагнитный датчик, размещаемый на заданном расстоянии от ориентира и генерирующий сигнал в ответ на генерированное электромагнитное поле, а также отсоединяемый элемент, соединенный с корпусом, причем указанный элемент задает продольную ось, представляющую собой одну ось генерированного магнитного поля. Система выполнена с возможностью использования указанной одной оси генерированного электромагнитного поля для определения положения указанного элемента относительно ориентира. При необходимости, если продольная ось элемента смещена относительно оси поля, это смещение можно скомпенсировать, используя программное обеспечение.
[0015] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, система может содержать первый зонд, имеющий проксимальный участок и дистальный участок, причем первый электромагнитный датчик расположен на дистальном участке зонда, и убираемый зонд, содержащий первый электромагнитный датчик, или убираемый зонд, содержащий первый электромагнитный датчик, а также корпус, вмещающий по меньшей мере часть убираемого зонда. Также можно предусмотреть наличие второго электромагнитного датчика, расположенного на проксимальном участке первого зонда. Система может содержать второй зонд, имеющий проксимальный и дистальный участок, и третий электромагнитный датчик, расположенный на дистальном конце второго зонда, причем второй зонд длиннее первого зонда. Кроме того, система может содержать процессор, сравнивающего сигнал от первого электромагнитного датчика и элемента и использующего значение заданного расстояния для вычисления положения элемента относительно ориентира. Кроме того, система может содержать регулируемый стопор, соединяемый с ортопедическим имплантатом. Регулируемый стопор может содержать прорезь, сквозь которую проходит первый или второй зонд, и содержит зажимное приспособление для удержания первого или второго зонда в фиксированном положении. Первый и второй зонд могут содержать множество расположенных друг от друга на расстоянии индикаторов, причем зажимное приспособление можно выборочно устанавливать для удержания первого или второго зонда в фиксированном положении у индикатора или между индикаторами. К ортопедическому имплантату можно присоединить отсоединяемую ручку. Автоклавируемый корпус может иметь форму диска. Элемент может содержать одно из следующего: направляющая сверла, сверлильная втулка, сверло, носовая часть сверла, сверлильная гильза, сверлильный патрон и фиксатор. Ортопедический имплантат может содержать одно из следующего: внутрикостный стержень, костная пластина, бедренный протез, коленный протез, позвоночный протез и плечевой протез. Перед установкой в ортопедический имплантат первый или второй зонд может находиться в свернутом или в согнутом состоянии. Первый электромагнитный датчик содержит проксимальный конец и дистальный конец. Дистальный конец первого электромагнитного датчика соединен с проксимальным концом ортопедического имплантата, так что первый электромагнитный датчик находится на определенном расстоянии по меньшей мере от одного ориентира, расположенного в проксимальной области ортопедического имплантата. По меньшей мере корпус и элемент выполнены с возможностью повторного использования. Корпус выполнен из одного из следующих материалов: керамика, силикон, полипропилен (ПП), поликарбонат (ПК), полиметилпентен (ПМП), ПТФЭ смола или метакрилат (ПММА или акрилового полимера).
[0016] Другой основной аспект изобретения относится к способу, в котором подвергают процессу стерилизации идентификатор ориентира, содержащий монтажную деталь, снабженную множеством элементов, выполненных с возможностью вмещения индукционных катушек генератора электромагнитного поля. Элементы расположены на монтажной детали с соблюдением взаимных положений и ориентации. Подвергание идентификатора ориентира процессу стерилизации по существу не приводит к изменению взаимных положений и ориентации указанного множества элементов.
[0017] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, способ дополнительно содержит этап, на котором идентификатор ориентира используют для наведения на ориентир ортопедического имплантата. Этап наведения может содержать размещение генератора поля в пределах зоны действия датчика и использование дисплея системы наведения для размещения идентификатора ориентира в заранее заданном положении относительно ориентира.
[0018] Другой основной аспект изобретения относится к способу создания идентификатора ориентира, содержащему следующие этапы: изготавливают элементы, соблюдая их положение в монтажной детали, закрепляют электромагнитные индукционные катушки, соблюдая их ориентацию в указанных элементах; изготавливают в монтажной детали сквозное отверстие; прикрепляют к монтажной детали соединительный элемент; покрывают монтажную деталь и электромагнитные индукционные катушки третьим автоклавируемым материалом; при необходимости наносят четвертый автоклавируемый материал поверх наружной поверхности третьего автоклавируемого материала. Монтажная деталь содержит первый размерно-устойчивый автоклавируемый материал. Соединительный элемент снабжен сквозным отверстием, выровненным со сквозным отверстием монтажной детали при креплении соединительного элемента к монтажной детали, при этом соединительного элемент содержит второй размерно-устойчивый автоклавируемый материал. Третий и четвертый автоклавируемые материалы также могут являться размерно-устойчивыми материалами.
[0019] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, с соединительным элементом соединяют с возможностью отсоединения по меньшей мере один из следующих элементов: втулка или насадка втулки. Втулка/насадка втулки предпочтительно выполнены из размерно-устойчивых автоклавируемых материалов достаточной прочности. Кроме того, способ содержит этап изготовления в монтажной детали по меньшей мере одной выемки и размещения в указанной по меньшей мере одной выемке по меньшей мере одного из следующих элементов: полый материал и пеноматериал, предпочтительно пеноматериал с закрытыми порами. На наружной поверхности идентификатора ориентира выполняют поверхность захвата, содержащую по меньшей мере один из следующих элементов: поверхностное рифление и углубление поверхности.
[0020] Другой основной аспект изобретения относится к устройству для наведения на ориентир ортопедического имплантата, содержащему установочную рукоятку, прикрепленную с возможностью отсоединения к ортопедическому имплантату; регулируемый стопор, содержащий привод, и зонд, содержащий датчик и множество меток, способствующих установке зонда и датчика в требуемом положении относительно ортопедического имплантата.
[0021] могут содержать по меньшей мере один из перечисленных ниже признаков. Например, регулируемый стопор содержит стыковочный участок, так что при соединении стопора с установочной рукояткой, стопор размещен или зафиксирован с тремя степенями свободы. Установочная рукоятка присоединена к ортопедическому имплантату посредством канюлированного болта.
[0022] Другой основной аспект изобретения относится к набору для наведения на ориентир ортопедического имплантата, содержащему проксимальный зонд наведения, содержащий полоску, и датчик, содержащийся внутри полоски или на полоске на заранее заданном расстоянии от контрольной точки полоски. Проксимальный зонд наведения содержит первый индикатор, указывающий, что проксимальный зонд наведения предназначен для наведения на проксимальные ориентиры ортопедического имплантата. Кроме того, набор содержит дистальный зонд наведения, содержащий полоску, более длинную, чем полоска проксимального зонда наведения, и датчик, содержащийся внутри полоски или на полоске дистального зонда наведения на втором заранее заданном расстоянии от второй контрольной точки объекта наведения дистального зонда наведения. Дистальный зонд наведения содержит второй индикатор, указывающий, что дистальный зонд наведения предназначен для наведения на дистальные ориентиры ортопедического имплантата.
[0023] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, первый индикатор содержит зажим с цветовой маркировкой, при этом второй индикатор содержит зажим с цветовой маркировкой, отличающейся по цвету от маркировки первого индикатора. Первый индикатор содержит зажим с цветовой маркировкой, при этом второй индикатор содержит зажим с цветовой маркировкой, отличающейся по цвету от маркировки первого индикатора. Проксимальный зонд наведения содержит кабель для передачи контрольному модулю сигнала от датчика, содержащегося внутри полоски или на полоске проксимального зонда наведения, при этом дистальный зонд наведения содержит второй кабель для передачи контрольному модулю сигнала от датчика, содержащегося внутри полоски или на полоске дистального зонда наведения. Датчики, предусмотренные внутри или на полоске проксимального или дистального зондов наведения, подсоединены по меньшей мере к одному микрочипу программируемого постоянного запоминающего устройства, определяющего, используются ли проксимальный и дистальный зонд наведения для проксимального или дистального наведения. Полоски проксимального или дистального зондов наведения содержат по меньшей мер один изгиб, обеспечивающий поджатие по меньшей мере части полоски к стенке ортопедического имплантата.
[0024] Другой основной аспект изобретения относится к зонду, предназначенному для наведения на ориентир ортопедического имплантата и содержащему корпус и размещенный в указанной корпусе выдвижной/убираемый элемент, имеющий при выходе из корпуса по существу прямолинейную форму. В корпусе расположен датчик, размещаемый в первом положении для наведения на проксимальный ориентир ортопедического имплантата, и во втором положении для наведения на дистальный ориентир ортопедического имплантата. Элемент содержит одно из следующего: слоистые гибкие стальные упругие ленты, эластичный пластик или резиновые трубки или листы. Элемент содержит множество вставленных друг в друга трубчатых сегментов, выдвигаемых и убираемых смещением внутри соседних сегментов трубы.
[0025] Другой основной аспект изобретения относится к устройству для наведения на ориентиры, расположенные на проксимальном конце ортопедического имплантата, содержащем установочную рукоятку и датчик, расположенный внутри или на установочной рукоятке на заданном расстоянии от проксимального блокирующего выреза, образующегося в ортопедическом имплантате при прикреплении установочной рукоятки к ортопедическому имплантату. Датчик является пассивным или запитан по электричеству. Датчик установлен в корпусе, который объединен или составляет единое целое с установочной рукояткой.
[0026] Другой основной аспект изобретения относится к идентификатору ориентира для использования в хирургической системе наведения, содержащему монтажную деталь с элементами, выполненными с возможностью вмещения индукционных катушек генератора электромагнитного поля и расположенными на монтажной детали с соблюдением взаимных положений и ориентации. Кроме того, идентификатор ориентира содержит по меньшей мере одно покрытие, выполненное поверх монтажной детали. При использовании взаимные положения и ориентации указанных элементов остаются по существу неизменными после подвергания по меньшей мере одному процессу стерилизации.
[0027] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, в монтажная деталь снабжена по меньшей мере одним отверстием, причем в указанной отверстии или отверстиях размещены полая вставка или пеноматериал с закрытыми порами. Генератор поля содержит по меньшей мере один из следующих элементов: втулка и насадку втулки, имеющих продольную ось, выровненную относительно центра тяжести идентификатора ориентира. Монтажная деталь выполнена или сформована из размерно-устойчивого автоклавируемого материала. Монтажная деталь содержит армированный эпоксидный слоистый пластик. Генератор поля содержит электромагнитные индукционные катушки, установленные в элементах с соблюдением взаимных положений и ориентации. Генератор поля содержит по меньшей мере одно покрытие, содержащее первое покрытие из автоклавируемого материала, причем указанное первое покрытие расположено поверх каждого элемента. Первое покрытие содержит силиконовый материал. Генератор поля содержит соединительный элемент, прикрепленный к монтажной детали или сформованный на монтажной детали и выполненный с возможностью вмещения отсоединяемой втулки или насадки втулки, причем соединительный элемент и втулка/насадка втулки содержат размерно-устойчивые автоклавируемые материалы. Втулка и насадка втулки снабжены участком в форме усеченного конуса.
[0028] Другой основной аспект изобретения относится к способу фиксации ортопедического имплантата, снабженного по меньшей мере одним отверстием, с использованием генератора электромагнитного поля, содержащего следующие этапы: выравнивают кончик направляющей сверла, предпочтительно зубчатый кончик, над указанным отверстием ортопедического имплантата с использованием генератора электромагнитного поля, выполняют разрез мягких тканей, вставляют кончик направляющей сверла сквозь разрез напротив кости, поворачивают кончик направляющей сверла напротив кости, выравнивая ось направляющей сверла с осью отверстия, и просверливают кость. Способ может дополнительно предусматривать, что сквозь отверстие ортопедического имплантата вводят в зацепление с костью крепежный элемент для фиксации ортопедического имплантата к кости. Введение крепежного элемента в зацепление костью предусматривает удаление сверлильной втулки и насадки втулки из соединительного элемента, присоединение или установку сквозь соединительный элемент движителя с крепежным элементом, выравнивание оси крепежного элемента и/или движителя с осью отверстия ортопедического имплантата и приведение крепежного элемента в движение, обеспечивающее вход в отверстие и фиксацию ортопедического имплантата к кости.
[0029] Варианты осуществления могут содержать по меньшей мере один из перечисленных ниже признаков. Например, способ может дополнительно содержать использование индикатора, соединенного с движителем и позволяющего вводить крепежный элемент в кость на необходимую глубину. Индикатор содержит лазерную маркировку, соответствующую фактическим или вычисленным размерам или высоте головки крепежного элемента, при этом основание головки снабжено кольцеобразной канавкой. Индикатор предназначен для указания положения крепежной головки относительно поверхности кости на основе взаимного расположения контрольного участка индикатора и кольцеобразной канавки.
[0030] Раскрываемые в данном документе способы и устройства обеспечивают ряд преимуществ. Во-первых, раскрываемые способы и устройства можно использовать независимо от флюроскопии и без необходимости применения рентгенографических устройств при наведении на трансфиксационные элементы, что позволяет уменьшить подвергание пользователей и пациентов излучению. Во-вторых, раскрываемые способы и устройства позволяют пользователю зафиксировать ведущий конец имплантата до фиксации неведущего конца имплантата. Другими словами, раскрываемые способы и устройства не нуждаются в использовании трубчатой полости имплантата, что предусматривает выполнение проксимальной фиксации перед дистальной фиксацией.
[0031] Другие преимущества и признаки будут понятны из следующего ниже подробного описания, приведенного со ссылками на сопроводительные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0032] Фиг.1 иллюстрирует систему для обнаружения ориентира.
[0033] Фиг.2 - вид в разрезе ортопедического имплантата фиг.1.
[0034] Фиг.3 - частичный вид в разрезе имплантата с фиг.1-2, иллюстрирующий установку датчика.
[0035] Фиг.4 - частичный вид в разрезе другого варианта установки датчика в имплантате.
[0036] Фиг.5 - вид в разрезе датчика и имплантата с фиг.4. [0037] Фиг.6 - другой модуль ортопедического имплантата.
[0038] Фиг.7 - частичный вид в плане отсоединяемого провода.
[0039] Фиг.8 - вид сверху модуля ортопедического имплантата с фиг.6.
[0040] Фиг.9 иллюстрирует идентификатор ориентира, содержащий сверлильную втулку.
[0041] Фиг.10 - частичный вид и вид в разрезе, иллюстрирующие двухточечные контакты имплантата.
[0042] Фиг.11 - другой частичный вид в разрезе, иллюстрирующий двухточечные контакты другого имплантата.
[0043] Фиг.12А - частичный вид и вид в разрезе имплантата, иллюстрирующие обжимное электрическое соединение.
[0044] Фиг.12В - частичное изображение в разобранном виде, иллюстрирующее электрическое соединение раскрываемого в имплантата.
[0045] Фиг.12С - вид сбоку электрического соединения с фиг.12В.
[0046] Фиг.12D - частичное изображение в разобранном виде, иллюстрирующее электрическое соединение в другом раскрываемом имплантате.
[0047] Фиг.13А - частичное аксонометрическое изображение и изображение в разобранном виде, иллюстрирующие альтернативные технические решения для выравнивания раскрываемых в описании ортопедического имплантата и установочной рукоятки.
[0048] Фиг.13А - частичное аксонометрическое изображение и изображение в разобранном виде, иллюстрирующие альтернативный вариант механизма выравнивания раскрываемого ортопедического имплантата и электрического соединения.
[0049] Фиг.14 - частичный вид сбоку, иллюстрирующий соединение установочной рукоятки с ортопедическим имплантатом.
[0050] Фиг.15 иллюстрирует другую систему обнаружения ориентира.
[0051] Фиг.16 - схематическая иллюстрация критериев выбора вида.
[0052] Фиг.17 - блок-схема, иллюстрирующая алгоритм выбора вида при проведении операции фиксации.
[0053] Фиг.18 - схематическая иллюстрация другого способа выравнивания идентификатора ориентира.
[0054] Фиг.19 - схематическая иллюстрация другого раскрываемого в описании способа выравнивания идентификатора ориентира.
[0055] Фиг.20 иллюстрирует раскрываемый в описании монитор с примерами отображаемых изображений.
[0056] Фиг.21 иллюстрирует другой раскрываемый идентификатор ориентира.
[0057] Фиг.22 - частичный вид другой раскрываемой установочной рукоятки.
[0058] Фиг.23 иллюстрирует другую систему обнаружения ориентира, раскрываемую в описании.
[0059] Фиг.24 - частичный вид еще одной установочной рукоятки, раскрываемой в описании.
[0060] Фиг.25 иллюстрирует другую систему обнаружения ориентира, раскрываемую в описании.
[0061] Фиг.26 - частичный вид разреза внутрикостного стержня.
[0062] Фиг.27 иллюстрирует раскрываемую в описании упаковку имплантата.
[0063] Фиг.28 иллюстрирует способ соединения системы идентификатора ориентира с сетью.
[0064] Фиг.29 иллюстрирует еще одну систему обнаружения ориентира, раскрываемую в описании.
[0065] Фиг.30 - блок-схема использования раскрываемой в описании системы обнаружения ориентира.
[0066] Фиг.31 - другая блок-схема использования раскрываемой в описании системы обнаружения ориентира.
[0067] Фиг.32 - схематическая иллюстрация отслеживания глубины сверления.
[0068] Фиг.33А и 33В также представляют собой схематические иллюстрации отслеживания глубины сверления.
[0069] Фиг.34 - частичная иллюстрация раскрываемого в описании устройства для отслеживания глубины сверления.
[0070] Фиг.35 - аксонометрическое изображение другой установочной рукоятки.
[0071] Фиг.36 - вид сверху в аксонометрии регулируемого стопора.
[0072] Фиг.37 - вид снизу в аксонометрии регулируемого стопора с фиг.36.
[0073] Фиг.38 - еще одна иллюстрация калибровки системы.
[0074] Фиг.39 - аксонометрическое изображение другого идентификатора ориентира, вмещающего генератор поля и сверлильную втулку и выполненного с возможностью обработки в процессе стерилизации или с использованием автоклава.
[0075] Фиг.39а - вид сверху в аксонометрии монтажной детали.
[0076] Фиг.39b - аксонометрическое изображение насадки сверлильной втулки и сверлильной втулки.
[0077] Фиг.40 - вид сбоку идентификатора ориентира/генератора поля/сверлильной втулки с фиг. 39 при вхождении в контакт с костью.
[0078] Фиг.41 - аксонометрическое изображение идентификатора ориентира/генератора поля/автоклавируемого корпуса с фиг.39, соединенных с насадкой отвертки.
[0079] Фиг.42 - вид в плане установочной рукоятки, регулируемого стопора и зонда.
[0080] Фиг.43 - аксонометрическое изображение примера регулируемого стопора, удерживающего зонд в требуемом положении.
[0081] Фиг.44 - аксонометрическое изображение другого примера регулируемого стопора.
[0082] Фиг.45 - аксонометрическое изображение внутрикостного стержня, установочной рукоятки, регулируемого стопора и зонда.
[0083] Фиг.46 - аксонометрическое изображение другого внутрикостного стержня, установочной рукоятки, регулируемого стопора и зонда.
[0084] Фиг.47 - аксонометрическое изображение двух зондов для использования при наведении на ориентиры имплантата.
[0085] Фиг.48 - аксонометрическое изображение другого зонда для использования при наведении на ориентиры имплантата.
[0086] Фиг.49 - вид в разрезе выдвижного зонда.
[0087] Фиг.50 - аксонометрическое изображение внутрикостного стержня, установочной рукоятки и регулируемого стопора.
[0088] Фиг.51 - иллюстрация системы наведения на ориентир имплантата.
[0089] Фиг.52 - иллюстрация устройства для использования при калибровке системы с фиг. 51.
[0090] Фиг.53-62 - иллюстрации регулируемых стопоров.
[0091] Следует понимать, что чертежи выполнены без обязательного соблюдения масштаба, и в некоторых случаях раскрываемые варианты осуществления проиллюстрированы схематичным и частичным образом. В некоторых случаях не изображены детали, не являющиеся обязательными для раскрывания изобретения или скрывающие от обзора другие детали. Следует понимать, что раскрываемое в описании изобретение не ограничено проиллюстрированными в описании конкретными вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0092] На сопроводительных чертежах схожим элементам соответствуют схожие номера позиций. На фиг. 1 изображен один из вариантов раскрываемой системы 10 обнаружения ориентира. Система 10 может содержать процессор 12, генератор 16 магнитного поля, идентификатор 18 ориентира и модуль 28 ортопедического имплантата. Кроме того, система 10 может содержать монитор 14, имеющий электрическое соединение с процессором 12, и установочную рукоятку 40, отсоединяемым образом прикрепленную к модулю 28 ортопедического имплантата. Процессор 12 изображен в виде стационарного компьютера на фиг.1, однако применимы и другие виды компьютерных устройств. Например, в качестве процессора 12 можно использовать стационарный компьютер, портативный компьютер, карманный персональный компьютер (КПК), мобильное переносное устройство или специально изготовленное устройство. Генератор 16 магнитного поля представляет собой устройство компании Ascension Technology Corporation, расположенной по адресу 107 Catamount Drive, Milton Vermont, США; компанией Northern Digital Inc., расположенной по адресу 103 Randall Drive, Waterloo, Ontario, Канада; или компанией Polhemus, расположенной по адресу 40 Hercules Drive, ColchesteRVermont, США. Разумеется, что применимы и другие генераторы. Например, генератор 16 поля может производить электромагнитное поле постоянного тока или электромагнитное поле переменного тока. Кроме того, система 10 может содержать контрольный модуль (не показан), соединенный с магнитным генератором 16 поля. Контрольный модуль управляет генератором 16 поля, получает сигналы от небольших мобильных индуктивных датчиков и проводным или беспроводным путем сообщается с процессором 12. Посредством аппаратного или программного обеспечения контрольный модуль можно интегрировать с процессором 12.
[0093] Система 10 представляет собой магнитную систему определения местоположения. В качестве иллюстрирующего примера, система 10 может содержать генератор 16 магнитного поля, снабженный расположенными соответствующим образом электромагнитными индуктивными катушками, используемыми в качестве опорной пространственной магнитной системы координат (то есть. X, Y, Z). Дополнительно система 10 может содержать небольшие мобильные индуктивные датчики, прикрепленные к объекту, местоположение которого определяют. Следует понимать, что несложным образом можно получить и другие конструктивные варианты. Положение и угловая ориентация небольших мобильных индуктивных датчиков выбраны в зависимости от их магнитной связи с исходным полем генератора 16 магнитного поля.
[0094] Следует отметить, что генератор 16 магнитного поля генерирует последовательность, или набор, в данном случае из шести различных пространственных конфигураций магнитного поля, или распределений, измерение каждого из которых выполняют посредством небольших мобильных индуктивных датчиков. Каждая последовательность позволяет небольшим мобильным индуктивными датчиками вырабатывать последовательность сигналов. Обработка указанной последовательности сигналов позволяет определять положение и/или ориентацию небольших мобильных индуктивных датчиков, и, следовательно, положение объекта, к которому прикреплен небольшой мобильный индуктивный датчик, относительно опорной магнитной системы координат, положение которой является фиксированным относительно генератора 16 магнитного поля. Процессор 12 или контрольный модуль может использовать опорную систему координат и полученные датчиками данные для создания матрицы преобразований, содержащей информацию о положении и ориентации.
[0095] Идентификатор 18 ориентира используют наведения на ориентир, например ориентир на модуле 28 ортопедического имплантата. Идентификатор 18 ориентира может содержать по меньшей мере один небольшой мобильный индуктивный датчик или может содержать генератор поля. Идентификатор 18 ориентира содержит второй датчик 20. Идентификатор 18 ориентира может содержать любое количество устройств. Например, идентификатор ориентира может являться устройством, содержащим конструктивный элемент, позволяющий пользователю узнать положение и ориентацию скрытого ориентира. Например, идентификатор ориентира может содержать направляющую сверла, сверлильную втулку, дрель, сверло, сверлильную гильзу, сверлильный патрон или фиксирующий элемент. В некоторых вариантах осуществления указанный конструктивный элемент может представлять собой корпус с отверстием, или другой конструктивный элемент, указывающий местоположение и ориентацию ориентира. На фиг.1 идентификатор 18 ориентира представляет собой сверлильную втулку и содержит датчик 20, причем на фиг.39 идентификатор 2016 ориентира содержит корпус 2020 с центральным отверстием и установленный в корпусе 2020 генератор магнитного поля (не показан). Идентификатор 18 ориентира может содержать по меньшей мере один зубчатый кончик 22, трубку 24 и ручку 26. Трубку 24 можно назвать также и втулкой, цилиндром, направляющей или направляющей под установку сверла/винта. Второй датчик 20 ориентирован относительно оси трубки 24. Трубка 24 может вмещать сверло. Смещение датчика 20 относительно трубки 24 позволяет определить положение и ориентацию трубки в пространстве по шести координатам (трем линейным и трем угловым) относительно генератора 16 магнитного поля и/или другого датчика в системе. Для регулировки величины смещения второго датчика 20 может потребоваться калибровка процессора 12. Идентификатор 18 ориентира и генератор 16 поля можно объединить в единый компонент. Например, генератор 16 поля можно встроить в ручку 26.
[0096] Модуль 28 ортопедического имплантата может содержать имплантат 30 и по меньшей мере один небольшой мобильный индуктивный датчик. Модуль 28 ортопедического имплантата содержит первый датчик 32. На фиг.1 имплантат 30 представляет собой внутрикостный стержень, однако применимы и другие виды имплантатов. Например, имплантат может представлять собой внутрикостный стержень, костную пластину, плечевой протез, бедренный протезом или коленный протез. Первый датчик 32 ориентирован и размещен в заданном положении относительно по меньшей мере одного ориентира на имплантате 30. Например, ориентир может представлять собой конструктивный элемент, отверстие, полость, выпуклость, канал, стопор, канавку, выступ, стенку, ступень, выемку, скважину, углубление, лунку, желобок, зазор, вырез, вход, проход, прорезь и щель. На фиг.1 ориентирами являются трансфикционные отверстия 31. Смещение первого датчика 32 относительно ориентира позволяет определить положение ориентира в пространстве по шести координатам (трем линейным и трем угловым) относительно генератора 16 магнитного поля и/или другого датчика в системе, например относительно второго датчика 32. Для регулировки величины смещения первого датчика 32 может потребоваться калибровка процессора.
[0097] Первый датчик 32 и второй датчик 20 соединены с процессором 12, что можно обеспечить проводным или беспроводным путем. В качестве первого датчика 32 и второго датчика 20 можно использовать датчик с шестью степенями свободы, позволяющий получать положение каждого датчика по трем линейным осям, обычно называемым X, Y и Z, и по трем угловым координатам, часто называемых углом тангажа, углом рыскания и углом крена. Определив положение датчика в указанных системах координат и зная положение и ориентацию каждого датчика, можно определить положение идентификатора 18 ориентира относительно ориентира на имплантате 30. В одном из частных вариантов осуществления информация от датчиков позволяет хирургу спланировать хирургический путь для фиксации и соответствующим образом выровнять сверло, используя глухое фиксирующее отверстие 31. Датчики 32, 20 представляют собой датчики с шестью степенями свободы, поставляемые компаниями Ascension Technology Corporation с адресом 107 Catamount Drive, Milton Vermont, США; Northern Digital Inc. с адресом 103 Randall Drive, Waterloo, Ontario, Канада; или Polhemus с адресом of 40 Hercules Drive, ColchesteRVermont, США. Разумеется, что применимы и другие датчики.
[0098] Первый датчик 32 можно прикрепить к имплантату 30. Например, первый датчик 32 можно прикрепить к наружной поверхности 37. При этом имплантат 30 с фиг.1 может содержать канавку 34 и гнездо 36 (лучше видно на фиг.2). Канавка 34 и гнездо 36 выполнены в стенке имплантата 30. Первый датчик 32 предназначен для прикрепления к имплантату 30 и установки в теле пациента на время срока службы имплантата 30. Кроме того, модуль 28 ортопедического имплантата может содержать крышку 38, покрывающую гнездо 36 и/или канавку 34. Крышку 38 можно разместить по существу вровень с наружной поверхностью 37 имплантата 30. Соответственно, имплантат 30 может содержать второе отверстие 39 (см. фиг.2) под крышку 38.
[0099] Для первого датчика 32 можно предусмотреть провода, обеспечивающие связь и питание. Провода и датчик можно прикрепить к имплантату 30. Провод 50 можно использовать для соединения первого датчика 32 с процессором 12 или с контрольным модулем. Провод 50 может представлять собой биосовместимое проволочное соединение, например типа DFT компании Fort Wayne Metals Research Products Corp., расположенной по адресу 9609 Indianapolis Road, Fort Wayne, Indiana 46809. DFT является зарегистрированной торговой маркой компании Fort Wayne Metals Research Products Corp. Для установки провода 50 относительно имплантата 30 можно использовать первый разъем 52. Второй разъем 54 можно использовать для соединения провода 50 с другим устройством, например с процессором 12, контрольным модулем или установочной рукояткой 40.
[0100] Первый датчик 32 можно зафиксировать в гнезде 36 посредством различных высокопрочных клеящих веществ или полимеров, в том числе эпоксидных смол, полиуретанов, полметилакрилатов, полиэфирэфиркетонов, УФ-отверждаемых адгезивов, силикона, а также используемых в медицине цианоакрилатов. Например, можно использовать ЕРО-ТЕК 301 компании Ероху Technology, 14 Fortune Drive, Billerica, Massachusetts 01821. Провод 50 можно закрепить в канавке аналогичным образом. Указанные способы фиксации не оказывают негативного влияния на работу электрических компонентов. Затем крышку 38 можно установить на имплантате 30 и приварить по месту. Например, крышки можно приварить к имплантату с помощью лазера.
[0101] Можно использовать монитор 14, подходящий для отображения положения и ориентации первого датчика 32 и второго датчика 20, что позволит хирургу видеть, как положения датчиков, так и их взаимную ориентацию. Процессор 12 может посылать данные относительно положения, проводным или беспроводным путем, на интерфейс пользователя, посредством которого возможно графическое отображение относительных положений идентификатора ориентира и имплантата на мониторе. Изображение, отображаемое на мониторе 14, можно ориентировать относительно идентификатора ориентира таким образом, чтобы хирург мог видеть интерфейс пользователя в качестве продолжения идентификатора ориентира. Кроме того, интерфейс пользователя можно ориентировать таким образом, чтобы хирург мог видеть монитор одновременно с хирургическим полем.
[0102] Установочную рукоятку 40 можно использовать для установки модуля 28 ортопедического имплантата, а также для подвода проводов от первого датчика 32. Например, установочную рукоятку 40 можно использовать для обеспечения подвода проводов связи и питания между имплантатом 30 и процессором 12.
[0103] На фиг.1, и идентификатор 18 ориентира и установочная рукоятка 40 содержат модуль 21, 25 связи для беспроводной передачи данных от датчика 20, 32 к процессору 12, однако специалистам в данной области техники будет очевидно, что могут быть использованы другие варианты, например, с использованием проволочного соединения. Второй разъем 54 подключают к модулю 25 связи. В альтернативном варианте, более подробно поясненном ниже, имплантат 30 и установочная рукоятка 40 могут иметь сопряженные электрические контакты, образующие соединение, компоненты которого обеспечивают соединение первого датчика 32 с модулем 25 связи.
[0104] Имплантат 30 может содержать цепь связи и антенну беспроводной связи. Питание первого датчика 32 и/или цепи связи можно расположить внутри установочной рукоятки 40. Например, внутри установочной рукоятки 40 можно разместить батарею для подачи питания к первому датчику 32 и/или другим электронным устройствам. В альтернативном варианте цепь связи, антенна и батарея могут быть расположены внутри установочной рукоятки 40, с подсоединением каждого из указанных элементов к первому датчику 32. В еще одном варианте осуществления, имплантат 30 может содержать катушку, обеспечивающую индуктивное питание цепи связи и передачу данных от первого датчика 32. Источник питания может иметь один режим питания или два режима питания: постоянного/переменного тока.
[0105] Во время использования модуль 28 ортопедического имплантата установлен внутри тела пациента. Например, при внутрикостной фиксации внутрикостный стержень размещают во внутрикостном канале. При необходимости пользователь может использовать трансфиксационные элементы, например винты, позволяющие выполнить начальное закрепление проксимального конца внутрикостного стержня. Оператор использует устройство 18 наведения и первый датчик 32 для обнаружения ориентиров. Например, при фиксации внутрикостного стержня хирург использует устройство 18 наведения для обнаружения глухих трансфиксационных отверстий 31 и высверливания отверстий 31 под размещение трансфиксационного элемента.
[0106] Фиг.2 также иллюстрирует имплантат 30 с фиг.1. Имплантат 30 может содержать первый датчик 32, продольную канавку 34, гнездо 36, крышку 38 и второе отверстие 39. Например, крышку 38 можно выполнить из золотой или титановой фольги. Имплантат 30 может содержать внутреннюю поверхность 35, образующую трубчатую полость 33. Наружная поверхность имплантата 30 обозначена номером позиции 37.
[0107] Фиг.3 иллюстрирует вариант осуществления первого датчика 32. Первый датчик 32 может содержать две катушки, расположенные перекрестно под углом α.
[0108] Фиг.4 и 5 иллюстрируют другой вариант осуществления первого датчика 32. Первый датчик может содержать две катушки, расположенные по существу взаимно перпендикулярно и задающие ориентацию и положение по шести степеням свободы. Первую катушку можно ориентировать вдоль имплантата 30. Вторую катушку можно установить либо обернув ее по периметру имплантата, например поместив в канавку, либо вдоль радиуса имплантата 30. Кроме того, при том, что катушки могут быть перпендикулярны друг к другу, их можно ориентировать и по-другому, хотя в этом случае математические соотношения могут быть более сложными. Кроме того, катушки можно расположить вокруг имплантата 30 по спирали.
Такая ориентация позволит расположить две катушки перпендикулярно друг другу, причем обе катушки будут проходить вдоль и по длине имплантата и по окружности имплантата 30.
[0109] Фиг.6-8 иллюстрируют второй вариант осуществления модуля 60 ортопедического имплантата. Модуль 60 ортопедического имплантата может содержать имплантат 30. Имплантат 30 с фиг.6 содержит ориентиры в виде трансфиксационных отверстий 31. Имплантат 30 может содержать продольную внутреннюю канавку 66 и отсоединяемый провод 64. На фиг.8 изображено, что диаметр продольной канавки 66 пересекается с трубчатой полостью 33; однако в других вариантах осуществления диаметр продольной внутренней канавки находится между наружной поверхностью 37 и внутренней поверхностью 35. На дистальном концевом участке 65 отсоединяемого провода 64 можно разместить первый датчик 32. Первый датчик 32 расположен с известным смещением относительно ориентиров 31. Имплантат с фиг.6-8 содержит биосовместимый материал, например металлический сплав или полимер. Продольную канавку 66 можно изготовить по месту путем механической обработки или прессованием.
[0110] Во время использования имплантат 30 с отсоединяемым проводом установлен в теле пациента. Например, при внутрикостной фиксации внутрикостный стержень размещен во внутрикостном канале. При необходимости пользователь может использовать трансфиксационные элементы, например винты, позволяющие выполнить начальное закрепление проксимального конца внутрикостного стержня. Благодаря положению продольной канавки 66, отсоединяемый провод 64 не мешает фиксировать проксимальный конец внутрикостного стержня. Для обнаружения ориентиров 31 оператор использует устройство 18 наведения и первый датчик 32. Например, при фиксации внутрикостного стержня хирург использует устройство 18 наведения для обнаружения глухих трансфиксационных отверстий 31 и высверливания отверстий 31 под размещение трансфиксационного элемента. После закрепления имплантата 30 оператор удаляет отсоединяемый провод 64, после чего провод 64 можно выбросить.
[0111] Изобретение относится к способу обнаружения ориентира, предусматривающему возможность обеспечения наличия модуля ортопедического имплантата, содержащего ортопедический имплантат с продольной канавкой и отсоединяемый провод или зонд с прикрепленным электромагнитным датчиком, расположенным внутри продольной канавки. Ортопедический имплантат содержит проксимальный концевой участок, дистальный концевой участок и по меньшей мере один ориентир, расположенный на дистальном концевом участке. Способ предусматривает, что модуль ортопедического имплантата имплантируют в тело пациента. Затем на проксимальном концевом участке размещают трансфиксационные элементы, посредством идентификатора ориентира обнаруживают по меньшей мере один дистальный ориентир. В указанном по меньшей мере одном дистальном ориентире устанавливают трансфиксационный элемент. Затем отсоединяемый провод или зонд можно убрать. Положение отсоединяемого соединительного провода или зонда внутри продольной канавки позволяет выполнять проксимальное крепление имплантата перед дистальным креплением.
[0112] Фиг.9 иллюстрирует идентификатор 18 ориентира с фиг.1. Идентификатор 18 ориентира может содержать датчик 20, зубчатый кончик 22, трубку 24 и ручку 26. На сверле 90 имеются метки 92, взаимодействующие с датчиком 19 меток, расположенным у трубки 24. Взаимодействие аналогично взаимодействию пары цифровых измерительных элементов в том отношении, что взаимное расположение метки 92 и датчика 19 соответствует расстоянию. Указанное расстояние можно использовать для определения глубины сверления кости и, в конечном счете, длины костного винта, вставляемого в просверленное отверстие. Замеры расстояния или глубины сверления можно получить только при нахождении меток 92 и датчика 19 в непосредственной близости друг к другу, то есть когда сверло 90 находится внутри трубки 24. Примеры измерительных устройств проиллюстрированы в патентах США № 6,675,491 и № 7,253,611. Датчик 19 меток соединен с модулем 21 связи. В альтернативном варианте датчик 19 меток можно проволочным соединением соединить с процессором 12. Модуль 21 связи с фиг. 9 может содержать третий разъем 23 для электрического соединения с процессором 12.
[0113] Фиг.10-12 иллюстрируют примеры электрического соединения имплантата 30 с установочной рукояткой 40, снабженной соответствующими электрическими контактами. В примере с фиг.10 использованы поджимающие элементы 72, поджимающие контакты 70 в направлении установочной рукоятки 40. В примере с фиг. 11 имплантат 30 снабжен упругими электрическими контактами 74. В примере с фиг.12А проволочные соединения, проходящие между проводом 50 и другим компонентом, изогнуты вместе в месте 76 соединения. В одном из вариантов после инсталляции модуля 28 ортопедического имплантата проволочные соединения разрывают и отделяют друг от друга в месте 76 соединения. В другом варианте после инсталляции модуля 28 ортопедического имплантата провода разрезают выше места 76 соединения. В примере с фиг.12В и С две гибкие пластины 53 соединены пайкой по меньшей мере с одной накладкой 57 для подсоединения к датчику электропроводки 55. Электропроводку 55 можно смонтировать на установочной рукоятке 40 или внутри трубчатой полости установочной рукоятки 40. В изображенном варианте осуществления соединены пайкой четыре накладки 57. Между имплантатом 30 и установочной рукояткой 40 размещены стопорные выступы 59, принимающие на себя трение и напряжение, связанные с вводом имплантата. После удаления установочной рукоятки 40 можно вытянуть электропроводку 55, вытянув вместе с ней и все биологически несовместимые материалы. В примере с фиг.12D во время изготовления присоединяют кольца 61, 63. После имплантации оба кольца 61, 63 удаляют путем вытягивания изолированного проволочного соединения 67.
[0114] На фиг.13А и 13В изображено, что имплантат 30 и/или установочная рукоятка 40 могут содержать по меньшей мере один выравнивающий элемент 44 и сопряженный с ним паз 80 или выравнивающий штырь 46 и сопряженное с ним отверстие 82. Установочную рукоятку можно выполнить выравниваемой относительно верхней поверхности имплантата. В одном из вариантов осуществления установочная рукоятка может иметь замковый элемент, сопрягаемый с прорезью на имплантате. Можно использовать другие выравнивающие направляющие элементы. При этом можно снабдить направляющий элемент электрическим разъемом, сопрягаемым с электрическим разъемом на имплантате. Для надежного электрического контакта между электрическими разъемами соединение между направляющим элементом и имплантатом можно выполнить подпружиненным. Во избежание короткого замыкания в соединении между направляющим элементом и имплантатом, электрический разъем можно изолировать. Другим вариантом электрического соединения установочной рукоятки с имплантатом предусмотрено, что электрические разъемы могут содержать штырь и токосъемные кольца. Кольца можно расположить на имплантате, а штыри - на установочной рукоятке. Для обеспечения контакта с кольцами предусмотрено смещение штырей. В подобном варианте осуществления угловое положение установочной рукоятки 40 относительно оси имплантата не является фиксированным. Это позволит размещать установочную рукоятку 40 на имплантате вне зависимости от углового положения.
[0115] На фиг.13В изображен другой вариант осуществления, в котором имплантат 30 и/или установочная рукоятка 40 могут содержать по меньшей мере один выравнивающий стержень 47 и сопряженное с ним отверстие 83. Выравнивающие стержни 47 могут представлять собой стержни с заостренным концом, предназначенные для однократного зацепления и захватывающие при удалении указанных стержней часть имплантата, так чтобы вместе со стержнями происходило удаление всех биологически несовместимых материалов.
[0116] Любой из описанных выше электрических разъемов может содержать запоминающее устройство (не показано) для сохранения величин смещения, используемых для калибровки датчиков.
[0117] Размеры имплантата 30 и установочной рукоятки 40 с фиг.14 можно подобрать таким образом, чтобы оставить место для первого разъема 52 даже после сборки или сопряжения компонентов. Например, систему обнаружения ориентира можно использовать для наведения на глухие винтовые отверстия имплантированного внутрикостного стержня. Внутрикостный стержень имплантируют в тело пациента. Активируют электрогенератор магнитного поля. Процессор получает сигналы от датчика, установленного на внутрикостном стержне, и от датчика, установленного на идентификаторе ориентира, например на сверлильной втулке. Компьютерная программа, работающая на процессоре, использует информацию по меньшей мере от двух указанных датчиков и обеспечивает графическое отображение их взаимного положения на мониторе. Хирург перемещает идентификаторы ориентира в заданное положение на основании обратной связи, обеспечиваемой процессором. Когда идентификатор ориентира приведен в нужное местоположение, хирург просверливает кость и внутрикостный стержень для получения отверстия под винт. Процессор может обеспечивать обратную связь касательно глубины просверленного отверстия. Затем хирург может установить в просверленное отверстие винт для соединения с глухим отверстием внутрикостного стержня.
[0118] Обратная связь может представлять собой, на выбор, звуковую, визуальную и тактильную информацию. Звуковую обратную связь можно осуществлять посредством динамика, головных наушников, наушников-вкладышей или ушной гарнитуры. Звуковой сигнал обратной связи можно передавать проводным или беспроводным путем с использованием радиочастотного или наземного канала передачи данных. Визуальную обратную связи можно осуществлять посредством катодно-лучевой трубки, жидкокристаллического дисплея или плазменного дисплея. В качестве устройств визуальной обратной связи можно выбрать, например телемонитор, электронную записную книжку или персональный медиа-плейер. Сигнал визуальной обратной связи можно передавать проводным или беспроводным путем с помощью радиочастоты или наземной передачи данных. Тактильную обратную связи можно осуществлять посредством перчаток, инструментов или напольного ковра. Сигнал тактильной обратной связи сигнал можно передавать проводным или беспроводным путем с использованием радиочастотного или наземного канала передачи данных.
[0119] Фиг.15 иллюстрирует систему 110 обнаружения ориентира согласно другому варианту осуществления. Система 110 может содержать процессор 112, идентификатор 118 ориентира и модуль 128 ортопедического имплантата. Дополнительно система 110 может содержать монитор 114 и установочную рукоятку 140.
[0120] Идентификатор 118 ориентира используют для наведения на ориентир. Идентификатор 118 ориентира может содержать второй датчик 120. Идентификатор 118 ориентира с фиг.15 представляет собой сверлильную втулку с зубчатым кончиком 122, трубкой 124 и ручкой 126. Второй датчик 120 ориентирован относительно оси трубки, выполненной с возможностью вмещения сверла. Указанное смещение датчика относительно трубки позволяет определить положение трубки в пространстве по шести координатам (трем линейным и трем угловым) относительно излучателя или другого датчика системы. Для регулировки величины смещения второго датчика 120 может потребоваться калибровка процессора.
[0121] Модуль 128 ортопедического имплантата может содержать имплантат 130 и магнит 132, который может являться постоянным магнитом или электромагнитом. Магнит 132 ориентирован в заданном положении относительно ориентира на ортопедическом имплантате 130. Указанное смещение датчика относительно ориентира позволяет определить положение ориентира в пространстве по шести координатам (трем линейным и трем угловым) относительно излучателя или другого датчика системы, например второго датчика. Для регулировки величины смещения магнита 132 может потребоваться калибровка процессора. Как и имплантат 30 с фиг.1, имплантат 130 также может содержать гнездо 136 и крышку 138. В варианте с электромагнитом, с магнитом 132 соединен провод 150, расположенный внутри канавки 134.
[0122] Например, систему обнаружения ориентира можно использовать для наведения на глухие винтовые отверстия имплантированного внутрикостного стержня. Внутрикостный стержень имплантируют в тело пациента.
Процессор получает сигналы от датчика, установленного на идентификаторе ориентира, например на сверлильной втулке. Компьютерная программа, работающая на процессоре, использует информацию от датчика и обеспечивает графическое отображение положения датчика относительно магнита на мониторе. Хирург перемещает идентификаторы ориентира в заданное положение, используя обратную связь, обеспечиваемую процессором. Когда идентификатор ориентира приведен в нужное местоположение, хирург просверливает кость и внутрикостный стержень для получения отверстия под винт. Процессор может обеспечивать обратную связь касательно глубины просверленного отверстия. Затем хирург может установить в просверленное отверстие винт для соединения с глухим отверстием внутрикостного стержня.
[0123] Фиг.16 иллюстрирует способ выбора вида, соответствующего положению идентификатора ориентира. Вид отображаемый на мониторе, зависит от положения идентификатора ориентира относительно имплантата. Диаметр имплантата разбит на секторы или поля. На фиг.16 диаметр разделен на три поля: (А) от 135° до 225°; (В) от 0° до 135°; и (С) от 225° до 360°. Начальный вид соответствует ориентации идентификатора ориентира относительно имплантата. Когда пользователь перемещает идентификатор ориентира в направлении к имплантату или от имплантата, монитор отображает на выбранном поле приближение или удаление.
[0124] Фиг.17 представляет собой блок-схему выбора вида и отображения одного ориентира. Процесс можно повторять для нескольких ориентиров. В процессоре 12 на следующих этапах процесса использована матрица преобразований. На этапе 200 вычисляют положение идентификатора ориентира относительно имплантата на основании положений соответствующих датчиков, при этом для отображения выбирают ориентир, расположенный ближе всего к идентификатору ориентира. На этапе 210 задают общий вид, изображающий имплантат целиком с выбранным ориентиром, ориентированным для надлежащего обзора. Общий вид аналогичен обзору имплантата на расстоянии. На этапе 220 определяют, имеются ли несколько ориентиров, имеющих ту же ориентацию. Если да, то на этапе 230 процессор вычисляет, какой из ориентиров расположен ближе всего к идентификатору ориентира и выбирает указанный ориентир для обзора. Если нет, то на этапе 240 задают локальный вид, центрируя его на выбранный ориентир. Локальный вид аналогичен обзору имплантата с близкого расстояния. В некоторых вариантах осуществления после выбора локального вида может потребоваться скрыть идентификатор ориентира. На этапах 250, 260, и 270 процессор 12 определяет расстояние от идентификатора ориентира до ориентира и, в зависимости от принятого решения, либо скрывает либо передает идентификатор ориентира. На этапе 250 вычисляют расстояние от идентификатора ориентира до ориентира и сравнивают вычисленное расстояние D и множественные переменные Тобщ и Тлок. Если D > Тобщ, то на этапе 260 выбирают общий вид и процессор переходит к этапу 285. Если D < Тлок, то выбирают локальный вид, центрируя его на ориентир на этапе 270. Затем процессор переходит к этапу 275. На опциональном этапе 275 идентификатор ориентира скрывают. В ином случае на основании расстояния D вычисляют промежуточное положение камеры, для обеспечения плавного перехода от общего вида к локальному виду на этапе 280. На этапе 285 отображают идентификатор ориентира. На этапе 290 получают кадр при выбранном положении камеры.
[0125] Фиг.18 - схематическая иллюстрация первого альтернативного варианта способа выравнивания идентификатора ориентира. Компьютерную программу, работающую на процессоре, можно использовать для получения информации от по меньшей мере двух датчиков и графического отображения их взаимного положения (второго датчика относительно первого датчика) на мониторе. Это позволяет пользователю использовать указанную систему для обеспечения направления при установке идентификатора ориентира. При сверлении глухих отверстий внутрикостного стержня пользователь использует систему для направления при установке сверлильной втулки, а затем для точного сверления сквозного отверстия во внутрикостном стержне. Графический интерфейс пользователя может содержать выравнивающий направляющий элемент для каждой степени свободы. Минимальный уровень выравнивания можно задать таким образом, чтобы хирург продолжал ориентацию идентификатора ориентира до тех пор, пока каждая степень свободы не будет соответствовать минимальному уровню выравнивания, достаточному для надлежащей установки идентификатора ориентира. На примере с фиг.18 представлен вариант, в котором установка по направлению Y соответствует минимально необходимой отслеживаемой установке. Однако установка ни по одной из других поступательных или вращательных степеней не соответствует минимальным требования. На чертеже отслеживаемые величины изображены в виде гистограмм, однако применимы и другие графические представления, например цветовое кодирование.
[0126] Фиг.19 - схематическая иллюстрация второго альтернативного варианта способа выравнивания идентификатора ориентира. В данном варианте осуществления графический интерфейс с использованием нескольких светодиодов для определения положения сверла можно разместить на идентификаторе ориентира, таком как сверлильная втулка. Используя светодиоды для слежения за линией движения сверла, хирург может выравнивать сверло относительно глухого фиксирующего отверстия. При слежении за линией движения можно дополнительно использовать вспомогательные дисплеи для снабжения системы дополнительной информацией. Например, для отражения величины регулировки, линия движения может содержать мигающие светодиоды, причем высокая частота мигания будет соответствовать необходимости большей регулировки, а низкая частота мигания будет соответствовать необходимости меньшей регулировки. Аналогичным образом для добавления информации относительно регулировки выравнивания можно использовать разные цвета.
[0127] Фиг.20 иллюстрирует монитор с примерами отображаемых видов. В первой области 500 указано расстояние, на котором находится сверло с каждой стороны имплантата. Это позволяет пользователю лучше понять, на какой глубине находится сверло, и предупреждать пользователя при достижении необходимой глубины сверления. Вторая область 510 позволяет пользователю получить информацию о выравнивании. Данные о глубине сверления можно получить, например, используя вариант осуществления с фиг.9.
[0128] Фиг.21 иллюстрирует альтернативный вариант осуществления идентификатора ориентира. Идентификатор ориентира выполнен с возможностью отображения, посредством светодиодов, положения и информации о линии движения, используемых для надлежащего выравнивания. Размер светодиодов может отображать дополнительную информацию, соответствующую величине необходимой регулировки. Световой индикатор линии движения может осуществлять простое включение/выключение при отображении состояний, соответствующих выровненной линии движения и линии движения с нарушением выравнивания. В другом примере предусмотрено светодиодное отображение линии движения со световой кодировкой, указывающей величину регулировки, необходимой для надлежащего выравнивания.
[0129] Фиг.22 иллюстрирует первый альтернативный вариант осуществления установочной рукоятки 700. Установочная рукоятка 700 может содержать дугообразную прорезь 710, ограничивающую движение идентификатора ориентира 18, 118 внутри рабочего пространства. При обнаружения глухого винтового отверстия дугообразная прорезь ограничивает движение сверлильной втулки, обеспечивая точную регулировку ее положения. Установочная рукоятка 700 может содержать каретку 712, вмещающую идентификатор ориентира и перемещаемую внутри прорези 710.
[0130] Фиг.23 иллюстрирует систему обнаружения ориентира согласно третьему варианту осуществления. В данном варианте ортопедический имплантат 800 представляет собой костную пластину, при этом установочная рукоятка 810 выполнена в виде небольшого направляющего элемента, прикрепленного к указанной костной пластине. Индуктивный датчик размещен на поверхности ортопедического имплантата 800 относительно одного или более ориентиров. Направляющий элемент 810 обеспечивает возможность линейного перемещения и/или поворота идентификатора ориентира 818 относительно указанного направляющего элемента для надлежащего выравнивания идентификатора ориентира относительно ориентира 802, такого как крепежное отверстие. Кроме того, если на имплантате имеется несколько фиксирующих отверстий, приблизительно определить положение дополнительных фиксирующих отверстий могут помочь дополнительные направляющие отверстия 812, выполненные на направляющем элементе 810.
[0131] Фиг.24 иллюстрирует второй альтернативный вариант осуществления установочной рукоятки. Установочная рукоятка 900 может обеспечивать точную регулировку положений идентификатора 918 ориентира за счет использования малых серводвигателей 920, 922, 924. Серводвигатели 920, 922, 924 могут регулировать ориентацию и положение идентификатора 918 ориентира. Управление серводвигателями может осуществляться как автоматически, так и хирургом.
[0132] Фиг. 25 иллюстрирует кость 100 и другую систему 1010 обнаружения ориентира. Система 1010 может содержать контрольный модуль 1012, генератор 1014 поля, идентификатор 1016 ориентира, внутрикостный стержень 1024 и зонд 1029. Идентификатор 1016 ориентира также может называться наводчиком. Контрольный модуль 1012 может являться частью описанного выше процессора или отдельным устройством. Внутрикостный стержень 1024 вставлен в кость 100, при этом внутрикостный стержень 1024 снабжен отверстием или ориентиром 1028. Генератор 1014 поля имеет электрическое соединение с контрольным модулем 1012. Установочная рукоятка 1022 прикреплена с возможностью отсоединения к внутрикостному стержню 1024. Установочную рукоятку 1022 и/или внутрикостный стержень 1024 можно изготовить с трубчатой полостью. Установочная рукоятка 1022 может содержать третий датчик 1032.
[0133] Идентификатор 1016 ориентира может содержать второй датчик 1020. Идентификатор 1016 ориентира может направлять сверло 1018, причем сверло 1018 можно соединить с дрелью (не показана). Второй датчик 1020 можно проводным или беспроводным путем соединить с контрольным модулем 1012. Генератор 1014 поля может находиться внутри или на идентификаторе 1016 ориентира, в этом случае наличие второго датчика 1020 не обязательно.
[0134] Зонд 1029 может содержать проволочное соединение 1030, ленту 1034 и стопор 1036. Ленту 1034 можно выбрать примерно 0.125 дюйма шириной и около 0.060 дюйма толщиной, выполненную из протяжной проволоки из нержавеющей стали марки 300, поставляемой Ideal Industries, Inc., Sycamore, Illinois. При этом специалистам в данной области техники будет очевидно, что могут быть использованы и другие материалы и другие размеры. Например, в качестве ленты 1034 можно использовать любую узкую полоску из полимера, композитного материала или металла, при этом возможно, что предпочтительнее использовать неферромагнитный металл. Перед размещением во внутрикостном стержне 1024 можно выполнить сворачивание ленты 1034. Сворачивание ленты 1034 может привести к приобретению ей естественной кривизны. В некоторых вариантах осуществления лента 1034 может иметь прямоугольную форму, облегчающую ориентацию ленты при ее размещении в трубчатой полости внутрикостного стержня 1024. Также применимы овальная, квадратная или круглая форма. Проволочное соединение 1030 можно функционально связать с лентой 1034, например клеящим или крепежным средством. Лента 1034 может содержать деления или зубцы для индикации глубины ленты при вставлении ленты в имплантат.
[0135] С контрольным модулем 1012 проводным или беспроводным путем соединен первый датчик 1026. Первый датчик 1026 соединен с посредством проволочного соединения 1030 и разъема 1038. Разъем 1038 не является обязательным элементом. Первый датчик 1026 можно соединить с дистальным концом ленты 1034, при этом с проксимальным концом ленты 1034 можно соединить стопор 1036.
[0136] Зонд 1029 может содержать корпус датчика (не показан) под размещение первого датчика 1026. Корпус датчика можно прикрепить к ленте 1034. Корпус датчика можно выполнить из неферромагнитного материала, например полимера, композитного материала или металла. Корпус датчика может содержать соответствующее средство ослабления натяжения, защищающее проволочное соединение 1030 от механического напряжения.
Конструкцию и конфигурацию корпуса датчика можно подобрать таким образом, чтобы корпус быть достаточно большим для удержания первого датчика 1026 и достаточно малым для вхождения в трубчатую полость установочной рукоятки или имплантата. Кроме того, конструкцию и конфигурацию корпуса датчика можно подобрать таким образом, чтобы корпус был достаточно длинным для обеспечения прохода изгибов внутрикостного стержня, выступа внутрикостного стержня и/или изгибов соответствующих инструментов. Геометрическую форму передней и задней поверхностей корпуса датчика можно подобрать таким образом, чтобы предотвратить зацепление или застревание корпуса датчика в трубчатой полости инструмента или имплантата.
[0137] Стопор 1036 можно использовать для контроля установки датчика 1026 и зонда 1029. При фиксированной длине ленты 1034 и известном расстоянии от конца установочной рукоятки до отверстия 1028 можно обеспечить точную повторяемость установки первого датчика 1026. Длина ленты 1034 может быть достаточной для выравнивания датчика 1026 с отверстием 1028, размещения вблизи отверстия 1028 или со смещением к отверстию 1028. Как описано ниже, для определения положения датчика относительно отверстия 1028 или других ориентиров можно использовать зонд 1029.
[0138] Установочная рукоятка 1022 не является обязательным элементом. При отсутствии указанной рукоятки можно выбрать другую длину ленты, таким образом, чтобы стопор 1036 входил в зацепление с участком или концом стержня 1024.
[0139] Фиг.26 представляет собой частичный детализированный вид внутрикостного стержня 1024, датчика 1026 и отверстия 1028. Датчик 1026 можно выровнять относительно отверстия 1028, расположить вблизи отверстия 1028 или со смещением относительно отверстия 1028. В обычном случае датчик 1026 расположен вблизи отверстия 1028.
[0140] Во время использования внутрикостный стержень 1024 помещен в кость 100. К внутрикостному стержню 1024 можно прикрепить установочную рукоятку 1022. Сквозь трубчатую полость установочной рукоятки 1022 в трубчатую полость внутрикостного стержня 1024 подают зонд 1029 до тех пор, пока в контакт со установочной рукояткой 1022 не войдет стопор 1036. В одном из частных вариантов осуществления посредством проволочного соединения 1030 подсоединен контрольный модуль 1012, используя который калибруют датчики 1026, 1020, и 1032. После калибровки зонд 1029 можно удалить. В этом случае для обнаружения относительного положения второго датчика 1020 и соответственно идентификатора 1016 ориентира можно использовать третий датчик 1032 и матрицу преобразований. При необходимости пользователь может использовать трансфиксационные элементы, например винты, для начального закрепления проксимального конца внутрикостного стержня. Для обнаружения ориентиров 1028 оператор использует идентификатор 1016 ориентира и первый датчик 1026. Например, при фиксации внутрикостного стержня хирург использует идентификатор 1016 ориентира для обнаружения глухих трансфиксационных отверстий и сверления сквозных отверстий под размещение трансфиксационного элемента.
[0141] Фиг.27 иллюстрирует вариант осуществления упаковки. В общем случае, перед проведением имплантации следует выполнить стерилизацию внутрикостных стержней. Если датчик установлен во внутрикостном стержне до стерилизации, во время стерилизации может произойти сбой калибровки датчика, в частности, если в процессе стерилизации используют облучение. Например, для стерилизации герметично закупоренных компонентов, например датчика, могут использовать гамма-облучение. Вариант осуществления с фиг.27 иллюстрирует, каким образом можно сохранить стерилизацию внутрикостного стержня, обеспечив при этом возможность повторной калибровки датчика. Упаковка с фиг.27 может содержать первый контейнер 1040, второй контейнер 1042, первый разъем 1044, второй разъем 1046 и кабель 1048. В изображенном варианте осуществления датчик (не показан) и внутрикостный стержень 1024 расположены внутри первого контейнера 1040. В альтернативном варианте внутри первого контейнера 1040 расположены зонд 1029 и датчик. В другом примерном варианте внутри первого контейнера 1040 расположен только датчик. К датчику можно подсоединить запоминающее устройство (не показано). Запоминающее устройство можно использовать для хранения матрицы (х1, у1, z1, x2, y2, z2) преобразований калибровки, а также других данных, например длины и размеров внутрикостного стержня или зонда. Запоминающее устройство можно установить или разместить на внутрикостном стержне 1024 или зонде 1029. Первый разъем 1044 имеет электрическое соединение и прикреплен с возможностью отсоединения ко второму разъему 1046. Кроме того, первый разъем 1044 имеет электрическое соединение с датчиком или запоминающим устройством. Первый контейнер 1040 позволяет сохранить стерильное состояние размещенного в нем устройства. Кабель 1048 имеет электрическое соединение со вторым разъемом 1046 и устройством хранения (не показано). Калибровку датчика загружают из устройства хранения и передают через разъемы 1044, 1046 к датчику или запоминающему устройству. Этап калибровки можно выполнить во время изготовления системы или непосредственно перед имплантацией имплантата.
[0142] Фиг.28 иллюстрирует способ подсоединения системы 1010 к сети. На фиг.28 изображена сеть 1060, компьютерное устройство 1050, кабель 1048, второй разъем 1046, первый разъем 1044 и внутрикостный стержень 1024. В изображенном варианте осуществления внутри внутрикостного стержня 1024 размещен датчик (не показан). В альтернативном варианте датчик можно прикрепить к зонду 1029 или установить отдельно. Внутрикостный стержень 1024 может находиться в упаковке, например в первом контейнере 1040 и/или втором контейнер 1042, однако в некоторых случаях это не обязательно. К датчику можно присоединить запоминающее устройство (не показано). Запоминающее устройство можно использовать для хранения матрицы (х1, у1, z1, x2, y2, z2) преобразований калибровки, а также других данных, например длины и размера внутрикостного стержня или зонда. Запоминающее устройство можно установить или разместить на внутрикостном стержне 1024 или зонде 1029. Сеть 1060 может представлять собой локальную сеть или распределенную сеть. К сети 1060 подсоединено компьютерное устройство 1054. Связь в сети можно осуществлять с шифрованием. Кабель 1048 соединяет компьютерное устройство 1054 с датчиком или запоминающим устройством посредством разъемов 1044, 1046. Это позволяет загружать калибровку датчика из компьютерного устройства 1054 и/или из сети 1060. Хотя в изображенном варианте осуществления внутри внутрикостного стержня присутствует датчик, в некоторых случаях это не обязательно. Датчик можно прикрепить к зонду или установить отдельно. Запоминающее устройство можно расположить внутри контрольного модуля, соединив контрольный модуль с сетью для загрузки калибровочных данных.
[0143] Фиг.29 иллюстрирует систему 1110 для обнаружения ориентира согласно четвертому варианту осуществления изобретения. Система 1110 может содержать контрольный модуль 1112, генератор поля 1114, идентификатор 1116 ориентира, внутрикостный стержень 1124, подвеску 1136 и зонд 1129. Контрольный модуль 1112 может представлять собой часть описанного выше процессора или отдельное устройство. Внутрикостный стержень 1124 вставлен в кость 100, при этом внутрикостный стержень 1124 снабжен отверстием или ориентиром 1128. С контрольным модулем 1112 проводным или беспроводным путем соединен генератор поля 1114. В изображенном варианте осуществления к внутрикостному стержню 1124 прикреплена с возможностью отсоединения установочная рукоятка 1122. Можно выполнить установочную рукоятку 1122 и/или внутрикостный стержень 1124 с трубчатой полостью. Установочная рукоятка 1122 может содержать третий датчик 1144. Подвеска 1136 может содержать четвертый датчик 1139.
[0144] Идентификатор 1116 ориентира может содержать второй датчик 1120. Идентификатор 1116 ориентира можно использовать для направления сверла 1018, которое можно соединить с дрелью (не показана). Второй датчик 1120 можно проводным или беспроводным путем соединить с контрольным модулем 1112. Генератор 1114 поля можно разместить внутри идентификатора 1116 ориентира или на идентификаторе 1116 ориентира, тогда второй датчик 1120 можно не использовать.
[0145] Зонд 1129 может содержать проволочное соединение ИЗО, ленту 1134 и стопор 1136. Как показано ниже, зонд может иметь и более цельную конструкцию. В некоторых вариантах осуществления лента 1134 может иметь прямоугольную форму, упрощающую ориентацию ленты при размещении внутри трубчатой полости внутрикостного стержня 1124. Проволочное соединение ИЗО можно функционально связать с лентой 1134, например, используя клеящее или крепежное средство. Первый датчик 1126 соединен с контрольным модулем 1112 проводным или беспроводным путем. Первый датчик 1126 подсоединен проволочным соединением ИЗО. Некоторыми вариантами осуществления предусмотрено использование отсоединяемого разъема. Первый датчик 1126 можно соединить с дистальным концом ленты 1134, соединив с проксимальным концом ленты 1134 стопор 1136. Для контроля установки датчика 1126 можно использовать стопор 1136. При фиксированной длине ленты 1134 и известном расстоянии от конца установочной рукоятки до ориентира 1128 можно обеспечить точную повторяемость установки первого датчика 1126. Длина ленты 1134 может быть достаточной для выравнивания датчика 1126 с ориентиром 1128, размещения вблизи ориентира 1128 или со смещением к ориентиру 1128.
[0146] Во время использования внутрикостный стержень 1124 размещают в кости 100. К внутрикостному стержню 1124 можно прикрепить установочную рукоятку 1122. Зонд 1129 подают сквозь установочную рукоятку 1122 во внутрикостный стержень 1124 до тех пор, пока стопор 1136 не войдет в контакт с установочной рукояткой 1122. В одном из частных вариантов осуществления посредством проволочного соединения ИЗО присоединен контрольный модуль 1112, используя который калибруют датчики 1126, 1120, и 1132. После калибровки зонд 1129 можно удалить. В этом случае для обнаружения относительного положения второго датчика 1120 и соответственно наводчика 1116 можно использовать третий датчик 1132 и/или четвертый датчик 1139 и матрицу преобразований. При необходимости пользователь может использовать трансфиксационные элементы, например винты, для начального закрепления проксимального конца внутрикостного стержня. Для обнаружения ориентиров 1128 оператор использует идентификатор 1116 ориентира и первый датчик 1126. Например, при фиксации внутрикостного стержня хирург использует идентификатор 1116 ориентира для обнаружения глухих трансфиксационных отверстий и сверления сквозных отверстий под размещение трансфиксационного элемента.
[0147] Фиг.30 иллюстрирует первый способ использования системы обнаружения ориентира. Способ начинают с этапа 1210. На этапе 1212 датчик помещают в стержень. На этапе 1214 установочную рукоятку соединяют со стержнем, и прикрепляют к установочной рукоятке подвеску. На этапе 1216 с датчиком соединяют контрольный модуль. На этапе 1218 датчик калибруют. На этапе 1220 датчик выравнивают относительно отверстия. На этапе 1222 положение датчика регистрируют с помощью контрольного модуля. На этапе 1224 датчик удаляют из стержня. На этапе 1226 стержень имплантируют в кость. На этапе 1228 просверливают отверстие, используя наводчик. Способ завершается этапом 1230.
[0148] Фиг.31 иллюстрирует второй способ использования системы обнаружения ориентира. На этапе 1310 запускают систему определения местоположения. На этапе 1312 вставляют в кость внутрикостный стержень. На этапе 1314 в канал внутрикостного стержня вставляют зонд 1129, обеспечивая его заранее заданные положение и ориентацию с помощью стопора 1136 и зубцов, распределенных по длине зонда 1129. На этапе 1316 принимают решение, следует ли перед дистальной фиксацией выполнить проксимальную фиксацию внутрикостного стержня. Если да, то на этапе 1326 к стержню прикрепляют подвеску. На этапе 1328, вычисляют смещение между зондом и подвеской. Другими словами, создают матрицу преобразований. В альтернативном варианте не соединяют с внутрикостным стержнем подвеску, а для вычисления сдвига используют датчик, вмонтированный в установочную рукоятку. На этапе 1330 удаляют зонд из стержня. На этапе 1334 выполняют проксимальную фиксацию стержня, которую можно получить с использованием идентификатора ориентира, механической колодки или вручную. На этапе 1336 идентификатор ориентира используют для наведения сверла. На этапе 1338, просверливают отверстие для дистального винта. На этапе 1340 выполняют дистальную фиксацию внутрикостного стержня. При этом, если принято решение выполнить сначала дистальную фиксацию, для наведения сверла на этапе 1318 используют идентификатор ориентира и зонд. На этапе 1320 просверливают отверстие под дистальный винт. На этапе 1322 выполняют дистальную фиксацию внутрикостного стержня. На этапе 1324 зонд удаляют из внутрикостного стержня. На этапе 1324 выполняют проксимальную фиксацию внутрикостного стержня, которую можно получить с использованием идентификатора ориентира, механического фиксирующего приспособления или вручную.
[0149] Фиг.32 иллюстрирует систему измерения заглубления сверла. Система 1400 может содержать статор 1410 и движок 1412. Статор 1410 и движок 1412 образуют емкостную решетку, позволяющую измерять относительное перемещение. Линейное смещение статора 1410 и движка 1412 относительно друг друга приводит к флуктуациям напряжения, которые можно анализировать и использовать для определения пройденного расстояния. Некоторыми вариантами осуществления предусмотрено размещение электронной измерительной цепи (не показана) и движка 1412 внутри идентификатора ориентира, при этом можно выполнить сверло с размещением статора 1410 вдоль наружной поверхности, так чтобы в линейном направлении статор 1410 и движок 1412 находились очень близко друг к другу. Линейное движение статора 1410 сверла индуцирует напряжение в принимающем движке 1412, которое электронная измерительная цепь анализирует, интерпретируя в виде измерения расстояния. Измерения расстояния можно отправлять на контрольный модуль и/или отображать на мониторе. Емкостные датчики высоко чувствительны к влажности, поэтому некоторые варианты осуществления могут предусматривать меры по предотвращению проникновения жидкости, например биологических жидкостей, между статором 1410 и движком 1412. Чтобы сохранить сверло по существу сухим, внутрь идентификатора ориентира можно установить уплотнительные кольца или другие аналогичные протирающие средства.
[0150] В альтернативном варианте сверло можно снабдить контрольными метками, например отмеряющими расстояние, и для определения глубины входа сверла в кость использовать колодку. Например, отдельную втулку (не показана) или сверлильную втулку идентификатора ориентира, например описанной выше трубки 24, можно перед сверлением разместить над сверлом таким образом, чтобы первый конец втулки, например кончик 22, размещался напротив поверхности кости, предназначенной для сверления. Когда сверло проходит сквозь втулку и входит в кость, второй конец втулки выполняет функцию контрольного участка, указывающего глубину входа сверла. Например, маркировка сверла, выровненного относительно контрольного участка, служит обозначением глубины введения сверла. Аналогичным образом можно измерить глубину введения крепежного элемента, например фиксирующего винта. Например, над крепежным элементом и приспособлением для ввода крепежного элемента можно расположить втулку движителя. На наружной поверхности движителя крепежного элемента может находиться лазерная маркировка, изображающая весь крепежный элемент или его часть, например крепежную головку, и/или по меньшей мере одна контрольная метка, например кольцевая канавка или другие виды маркировки. Во время использования, при введении крепежного элемента в кость, изображение крепежного элемента и/или другой контрольной метки перемещается относительно контрольного участка втулки, такого как конец втулки. Исходя из относительного положения контрольного участка втулки и изображения или других видов маркировок, можно определить глубину введения крепежного элемента. Например, выравнивание конца втулки по кольцевой канавке движителя, расположенной непосредственно под изображением головки крепежного элемента, указывает на то, что основание головки крепежного элемента находится заподлицо с костью. До тех пор, пока втулка не закроет какую-либо часть изображения головки, это означает, что настоящая головка крепежного элемента еще целиком находится выше поверхности кости.
[0151] Фиг.33А и 33В иллюстрируют другою систему измерения заглубления сверла. Система 1500 может содержать отражающий кодовый диск или ленту 1510, линзу 1512 и кодовый датчик 1514. Линза 1512 фокусирует свет на полоску кодовой ленты 1510. При повороте кодовой ленты 1510, изображение с чередованием света и тени, образуемое соответственно просветом и полоской, попадает на фотодиоды кодового датчика 1514. Кодовый датчик 1514 переводит изображение в цифровые выходные сигналы, соответствующие линейному перемещению кодовой ленты. Кодовый датчик представляет собой отражающий оптический кодовый датчик марки AEDR-8300 компании Avago Technologies, расположенной по адресу 350 W Trimble Road, San Jose, California. Альтернативный вариант предусматривает использование навигационной системы от Avago Technologies ADNS-5000 One Chip USB на основе светодиодов. Кодовый датчик и поддерживающие электронные устройства можно размесить внутри идентификатора ориентира, так чтобы область ввода датчика была ориентирована в направлении "окна" трубчатой полости идентификатора ориентира. Метками, например концентрическими кольцами темного цвета или блестящими отражающими кольцами, можно снабдить сверло для лучшего различения сверла кодовым датчиком. Такие метки можно использовать в целях указания нулевой точки начала измерений. Сверло перемещают в линейном направлении внутри идентификатора ориентира, при этом движение сверла измеряет кодовый датчик. Значения измерений расстояния можно отправлять на контрольный модуль и/или отображать на мониторе.
[0152] Фиг.34 иллюстрирует еще одну систему измерения глубины сверления. В системе 1600 использован линейный дифференциальный трансформатор (ЛДТ, (LVDT) 1612. ЛДТ (LVDT) представляет собой электрический трансформатор для измерения линейного перемещения. ЛДТ (LVDT) 1612 может содержать несколько соленоидных катушек 1618, расположенных один за другим вокруг трубки 1610, являющейся в изображенном идентификатором ориентира. На фиг. 34 центральная катушка является первичной катушкой, а две внешние катушки являются вторичными катушками. Цилиндрический ферромагнитный сердечник 1610, такой как сверло, перемещается вдоль оси трубки. В первичной катушке возбуждается переменный ток 1614, вызывая индуцированное напряжение в каждой вторичной катушке пропорционально ее взаимной индуктивности с первичной катушкой. Приемный датчик 1616 измеряет величину выходного напряжения, пропорциональную расстоянию перемещения сердечника (вплоть до предела его хода). Фаза напряжения указывает направление перемещения. Поскольку скользящий сердечник не касается внутренней поверхности трубки, он может перемещаться без трения, что делает ЛДТ (LVDT) высоконадежным устройством. Отсутствие каких-либо скользящих или поворотных контактов обеспечивает ЛДТ (LVDT) полную изоляцию от внешней среды. Значения измерений расстояния можно отправлять на контрольный модуль и/или отображать на мониторе.
[0153] Фиг.35-37 иллюстрируют установочную рукоятку 1700 (фиг.35) и регулируемый стопор 1800 (фиг 37-38). Установочная рукоятка 1700 содержит шток 1710, присоединяемый к имплантату, например внутрикостному стержню (не показан), на концевой части 1712. Установочная рукоятка 1700 может содержать быстроразъемное соединение 1716 для прикрепления к подвеске, проксимальному устройству наведения или другим инструментам или устройствам. Установочная рукоятка может содержать верхнюю часть 1714, которая может содержать отверстие и/или выравнивающий элемент. Регулируемый стопор 1800 может содержать прорезь 1810, выравнивающий элемент 1812 и крепежное отверстие 1814.
[0154] В варианте с фиг.35-37 регулируемый стопор 1800 можно прикрепить с возможностью отсоединения к верхней части 1714 ручки 1700. Регулируемый стопор можно выполнить как единое целое с установочной рукояткой 1700. В других вариантах осуществления регулируемый стопор можно прикрепить к установочной рукоятке 1700 неразъемным образом. Выравнивающий элемент 1812 входит в выравнивающий элемент верхней части, предотвращая тем самым вращение регулируемого стопора. Сквозь крепежное отверстие 1814 можно провести крепежный элемент (не показан) для прикрепления регулируемого стопора к установочной рукоятке 1700. В трубчатую полость внутрикостного стержня сквозь прорезь 1810 и сквозь стержень 1710 можно провести ленту 1034, 1134. Прорезь 1810 может иметь форму, соответствующую геометрической форме ленты и/или зонда 1129, так чтобы облегчать их ввод или предотвращать вращение ленты. Ленту 1034, 1134 или зонд 1129 можно снабдить метками, градуировкой или зубцами для указания подходящей глубины для используемой длины стержня. Регулируемый стопор 1800 может содержать механизм блокировки (не показан) для временной блокировки ленты 1034, 1134 на определенной глубине. В своей простейшей форме фиксирующее устройство может представлять собой крепежный элемент, зацепление которого с лентой 1034, 1134 обусловлено силой трения.
[0155] Фиг.38 иллюстрирует способ калибровки системы обнаружения ориентира. Калибровка необходима для точности. Способ начинают с этапа 1900, который может содержать этап подключения питания к системе. На этапе 1910 вынимают из упаковки, при наличии таковой, зонд и идентификатор ориентира, и сканируют. Сканируют также и подвеску элемент. Этап сканирования может содержать считывание штрих-кода с помощью считывателя штрих-кода. На этапе 1912, в результате сканирования система находит соответствующие штрих-коду значения смещения датчика из справочной таблицы. Справочная таблица может быть локальной или доступной через сеть, например через сеть Интернет. В альтернативном варианте зонд и идентификатор ориентира могут содержать серийный номер или другой уникальный идентификатор, используемый в сочетании со справочной таблицей для получения значения смещения датчика. На этапе 1914 значение смещения датчика сохраняют в локальной памяти системы. На этапе 1916 пользователь размещает зонд относительно имплантата и пытается определить положение ориентира, используя идентификатор ориентира на этапе 1916. На этапе 1918 принимают решение, является ли калибровка верной. Если да, способ заканчивают этапом 1920. В противном случае на этапе 1912 находят новые значения смещения.
[0156] Фиг.39 иллюстрирует вариант осуществления, объединяющий идентификатор ориентира, генератор поля и сверлильную втулку. Портативный идентификатор 2016 ориентира вмещает электрогенератор магнитного поля (не показан), который может содержать по меньшей мере одну индукционную катушку или другие элементы для создания подходящего электромагнитного поля или полей. Электрогенератор магнитного поля установлен внутри или поверх автоклавируемого материала и заключен в автоклавируемый корпус 2018, изготовленный с возможностью несложной стерилизации и разъемного зацепления с инструментом. Взаимную ориентацию и положение индукционных катушек или элементов идентификатора 2016 ориентира можно подобрать таким образом, чтобы добиться оптимального баланса свойств, силы электромагнитного поля или полей и их взаимодействия с датчиком, с весом, размерами, форм-фактором и эргономикой идентификатора 2016. Внутри или поверх автоклавируемого материала можно установить по меньшей мере три индукционных катушки (не показаны).
[0157] На примере с фиг.39а идентификатор 2016 ориентира снабжен монтажной деталью 2030. Монтажная деталь 2030 содержит элементы 2031, например гнезда или стойки, выполненные с возможностью вмещения индукционных катушек генератора электромагнитного поля с соблюдением взаимных положений и ориентации. Например, каждый из элементов 2031 выполнен внутри монтажной детали 2030 или на монтажной детали 2030 таким образом, что размеры и форма каждого элемента 2031 согласованы с участком индукционной катушки, и элемент обеспечивает установку индукционной катушки внутри элемента 2031 или на элементе 2031 в заранее заданных положениях и с заранее заданной ориентацией. Индукционные катушки можно затем закрепить внутри элементов или на элементах с помощью клеящих, механических или других крепежных средств или приспособлений. Выводы катушек можно провести сквозь выполненные в монтажной детали 2030 каналы 2033. В альтернативном варианте указанные элементы могут иметь другую форму, например стойки, при этом положение и ориентацию каждой индукционной катушки можно контролировать во время сборки с помощью колодки или другого сборочного приспособления. Установка индукционных катушек в заданные положения и с заданной ориентацией позволяет использовать заданные калибровочные параметры для генератора поля и/или для датчиков. В дополнительном варианте, элементы 2031 на монтажной детали 2030 могут иметь произвольные положения и ориентации, однако по истечении последующего процесса стерилизации положение и ориентация элементов 2031 останутся по существу теми же самыми, о чем дополнительно сказано ниже. Для случая произвольных положений и ориентации генератор поля и/или датчики можно откалибровать на основе характеристик электромагнитного поля, генерируемого катушками.
[0158] Автоклавируемые материалы идентификатора 2016 ориентира позволяют стерилизовать или многократно обрабатывать идентификатор 2016 ориентира в автоклаве без ухудшения свойств автоклавируемых материалов, внутренних компонентов или эксплуатационных характеристик идентификатора ориентира. Например, монтажная деталь 2030, на которой установлены катушки и/или другие компоненты, генерирующие электромагнитное поле, изготовлена из материала, который не оказывает влияния на генерируемое электромагнитное поле, и который можно подвергнуть стерилизации, в том числе обработать в автоклаве. Например, внутреннюю часть можно выполнить из армированного стекловолокном эпоксидного слоистого пластика, такого как армированный стекловолокном эпоксидный слоистый пластик NEMA марки G-11 (VETRONITE G11), или его эквивалента. В альтернативном варианте монтажную деталь 2030 можно изготовить из другого размерно-устойчивого материала, сохраняющего постоянные размеры под воздействием температур, давления, перепадов влажности и других внешних условиях, связанных с обработкой в автоклаве и/или с другими процессами стерилизации. В частности, монтажная деталь 2030 выполнена из материала, который по существу не расширяется, не сжимается, не деформируется, не размягчается или не претерпевает любые другие существенные структурные изменения в процессе обработки в автоклаве, и называется размерно-устойчивым автоклавируемым материалом. Таким образом, положения и ориентации катушек и/или других компонентов, установленных на монтажной детали 2030, во время процесса обработки в автоклаве по существу не меняются. Так, во время процесса обработки в автоклаве, ориентация по меньшей мере одной катушки в любом направлении не меняется более чем на 2 градуса, при этом положение катушек в любом направлении не меняется более чем на 0,005 дюйма. Помимо упомянутого армированного стекловолокном эпоксидного слоистого пластика, материалы, подходящие для изготовления монтажной детали 2030, содержат материалы, армированные углеродным волокном, в том числе ORTHTEK RP, ORTHTEK WF, TECACOMP CF60, ТЕСАРЕЕК CF30-ХР98, ULTEM 1000, ULTEM 2300, Zacton 350, Garolite G-7, Garolite G-11, Garolite G-10/FR4, Garolite G9. В некоторых вариантах осуществления материалы для изготовления монтажной детали 2030 имеют прочность на изгиб по меньшей мере около 10,000 пси. К дополнительным материалам относятся немагнитные материалы, такие как сплав кобальта с хромом, титан или нержавеющая сталь марки 300.
[0159] При необходимости монтажную деталь 2030 можно снабдить пустотами или облегченными вставками в зонах 2037, не пересекающихся с местами под размещение элементов 2031, что позволит снизить вес идентификатора 2016 ориентира приблизительно примерно до пяти фунтов или менее, и/или получить желаемое распределения веса вокруг идентификатора 2016 ориентира. Например, центр тяжести идентификатора 2016 ориентира может находиться внутри отверстия, например отверстия 2035 (фиг.39а), что обеспечит вращательное или угловое равновесие и/или предотвратит смещение идентификатора 2016 ориентира относительно отверстия при вращении, например вращении, обусловленном силой тяжести при расположении центра тяжести вне отверстия идентификатора ориентира. Например, по меньшей мере в одной области 2037, или в других областях, не мешающих размещению компонентов генератора поля и/или не нарушающих конструкционных свойств монтажной детали, можно выполнить отверстия и поместить в указанные отверстия полые вставки. Аналогичным образом в областях 2037 можно разместить облегченный пеноматериал. Подбором размеров и положения отверстий, а также разницы между плотностью размещенного в отверстиях материала и плотностью материала монтажной детали 2030 можно задать положение центра тяжести идентификатора 2016 ориентира.
[0160] Монтажная деталь 2030 охвачена первым покрытием 2018а, выполненным из первого материала, такого как многокомпонентный формованный силиконовый материал VMQ #71385С компании Minnesota RubbeR&Plastics, расположенной по адресу 1100 Xenium Lane N. Minneapolis, MN 55441. Первое покрытие 2018а защищает монтажную деталь и компоненты генератора поля от ударов во время использования, а также от проникновения влаги в процессе обработки в автоклаве. При этом первый материал первого покрытия 2018а обладает термоустойчивостью к температурам, соответствующим температурам обработки в автоклаве, например к температурам до 120 градусов Цельсия. Кроме того, первый материал обладает такими свойствами в отношении влагопоглощения, электропроводности и теплопроводности, которые предотвращают повреждение компонентов генератора электромагнитного поля под воздействием тепла или влаги, а также влияние контакта с первым материалом на работу компонентов. Материалы, подходящие для первого покрытия 2018а содержат титан, керамику, полипропилен (РР), сополимер полипропилена (РРСО), поликарбонат (PC), полиметилпентен (РМР), политетрафлуроэтиленовые смолы (PTFE), полметилакрилат (РММА или акриловый полимер), этилен тетрафлуроэтилен (ETFE), этилен хлортрифлуроэтилен (ECTFE), флуро этилен пропилен (FEP), полиэстер имид (PEI), перфторалкоксил (PFA), поликетон (РК), полифенилен оксид (РРО), полисульфон (PSF), поливинилхлорид (PVC), поливинилиден флуорид (PVDF), силикон и термоэластопласт (ТРЕ) или сочетания указанных материалов.
[0161] При необходимости, перед нанесением первого покрытия 2018а можно покрыть монтажную деталь 2030 сжимаемым пеноматериалом с закрытыми порами. Например, сжимаемый пеноматериал с закрытыми порами можно нанести на монтажную деталь 2030 посредством формования под давлением, обеспечивающего заполнение пеноматериалом любых отверстий, выполненных в областях 2037. Сжимаемый пеноматериал обеспечивает пользователю удобство захвата идентификатора 2016 ориентира и снижает плотность идентификатора ориентира по сравнению с вариантом, в котором силикон первого покрытия 2018а сформован непосредственно на монтажной детали 2030. Как указано выше, можно выполнить формование под давлением, или другим способом, силикона или другого материала первого покрытия 2018а поверх пеноматериала. Закрытость ячеек пеноматериала позволяет ограничивать проникновение силикона или другого материала первого покрытия 2018а внутрь пеноматериала, что сохраняет снижение веса, обеспечиваемое пенопластом. В некоторых вариантах осуществления в пеноматериале могут быть предусмотрены канавки, каналы, лакуны или другие элементы, причем указанные элементы могут быть заполнены первым покрытием 2018а для повышения прочности сцепления между первым покрытием и пеноматериалом, а также для повышения прочности идентификатора 2016 ориентира.
[0162] При необходимости корпус 2018 дополнительно содержит второе покрытие 2018b, которое может обеспечивать дополнительный защитный или изолирующий слой, или придавать эстетическую привлекательность наружной кромке корпуса 2018. Второе покрытие 2018b можно выполнить из второго материала, например многокомпонентного формованного силиконового материала VMQ #71325С компании Minnesota RubbeR& Plastics, расположенной по адресу 1100 Xenium Lane N., Minneapolis, MN 55441. В альтернативном варианте второе покрытие 2018b можно выполнить из материалов, описанных выше применительно к первому покрытию 2018а. При необходимости на наружной поверхности по меньшей мере выбранных участков второго покрытия 2018b и/или открытых частей первого покрытия 2018а можно выполнить рифление, предназначенное для захвата пользователем при удерживании идентификатора 2016 ориентира. Например, с наружной стороны второго покрытия 2018b можно выполнить шероховатое рифление поверхности, ребра, лунки, выпуклости или другое рифление поверхности. При необходимости рифление наружной поверхности второго покрытия 2018b можно изготовить только в тех местах, где предусмотрен захват идентификатора 2016 ориентира пользователем. Таким образом, наружное рифление поверхности будет указывать пользователю, в каком месте следует при использовании захватывать идентификатор 2016 ориентира.
[0163] Корпус 2018 содержит также соединительный элемент 2018с, проходящий сквозь внутреннюю часть и входящий в зацепление по меньшей мере с одним прикрепляемым компонентом. Как показано на фиг.39b, к указанному соединительному элементу прикреплена насадка 2020 сверлильной втулки. В частности, насадка 2020 сверлильной втулки содержит валик 2041, помещаемый в отверстие 2035 (фиг.39а) на монтажной детали 2030. Кроме того, насадка сверлильной втулки содержит участок 2043 в форме усеченного конуса и резьбовой участок 2045, входящий в зацепление с соответствующими конструктивными элементами соединительного элемента 2018с, таким как гнездо в форме усеченного конуса и внутренняя резьба. В альтернативном варианте участок 2043 и соответствующее гнездо могут иметь другую согласованную геометрическую форму (например, цилиндрическую или коническую), способствующую ограничению люфта и фиксации положения и ориентации насадки 2020 сверлильной втулки относительно соединительного элемента 2018с. Аналогично описанным выше компонентам генератора электромагнитного поля, положение и ориентация соединительного элемента 2018с и насадки 2020 сверлильной втулки и втулки 2022 сверла влияют на точность используемого идентификатора 2016 ориентира. Поэтому соединительный элемент 2018с, насадка 2020 сверлильной втулки и сверлильная втулка 2022 выполнены, как уже указано, из размерно-устойчивых автоклавируемых материалов, таких как полисульфон, или немагнитных металлов, таких как сплав кобальта с хромом, титан или нержавеющая сталь марки 300.
Например, соединительный элемент 2018с и насадку 2020 сверлильной втулки можно выполнить из GEHR полифенилсульфона (PPSU) цвета RAL 9005 Black (Solvay Radel R-5500) или его эквивалентов. В альтернативном варианте соединительный элемент 2018с и насадку 2020 сверлильной втулки можно выполнить из размерно-устойчивых и автоклавируемых материалов, описанных выше применительно к монтажной детали 2030. Кроме того, соединительный элемент 2018с, насадка 2020 сверлильной втулки и сверлильная втулка 2022 могут составлять единое целое с идентификатором 2016 ориентира.
[0164] На фиг.39 представлен частный вариант осуществления идентификатора 2016 ориентира, который может дополнительно содержать отсоединяемую насадку 2020 сверлильной втулки и сверлильную втулку 2022 с зубчатым кончиком 2024; при этом возможно наличие других различных компонентов и конструктивных элементов, описанных в данном документе. Насадку 2020 втулки и сверлильную втулку 2022 можно выполнить как единый элемент или как отдельные элементы, соединенные друг с другом клеящими или другими известными средствами соединения. Приведенная в иллюстративных целях втулка 2022 с фиг.39 представляет собой сверлильную втулку, однако можно использовать и втулку большего размера, например втулку под отвертку или другие втулки по выбору хирурга, или другие компоненты, описанные в данном документе. Например, под размещение сверл разного размера могут быть использованы различные сверлильные втулки 2022 разного размера и разной длины, например в соответствии с различной толщиной тканей пациента. Для замены втулок или других компонентов хирург отвинчивает насадку втулки и устанавливает другую насадку втулки по выбору и соответствующую втулку. Как уже указано, сверлильную втулку 2022 и/или втулку под отвертку можно использовать для оценки глубины введения сверла или крепежного элемента с помощью контрольных меток, выполненных на сверле или отвертке и контрольном участке идентификатора ориентира. Например, при размещении сверлильной втулки 2022 напротив кости, отверстие идентификатора ориентира, сквозь которое вводят сверло, можно использовать в качестве контрольного участка.
[0165] В отличие от идентификатора 18 ориентира с фиг.9, для идентификатора 2016 ориентира с фиг.39-40 не требуется наличия второго датчика 20 с фиг.9, поскольку исходную точку общей системы координат (область, в которой генерируют электромагнитное поле) можно задать внутри идентификатора 2016 ориентира. Одной осью такой общей системы пространственных координат может являться продольная ось сверлильной втулки или другого компонента 2022. В этом случае другие две оси общей системы пространственных координат могут определяться плоскостями, перпендикулярными указанной продольной оси и друг другу. К преимуществам встраивания генератора поля в идентификатор 2016 ориентира относятся меньшие размеры генератора поля, поскольку его можно ввести в локальное рабочее пространство (область, которая может содержать ориентиры, например отверстия имплантата, на которые требуется навестись для размещения винта), на что требуется более слабое электромагнитное поле. В случае размещения идентификатора 2016 ориентира вместе с соответствующим генератором поля вблизи ориентира, имплантата или датчика зонда (не показан) имеет место совпадение общего пространства и локального рабочего пространства или по меньшей мере более близкое их пространственное соответствие. Поскольку требуется меньшая величина электромагнитного поля, индукционные катушки внутри генератора поля могут быть меньше, что позволяет снизить размеры и вес портативного генератора поля и сделать его более удобным в ручном обращении. Кроме того, использование идентификатора 2016 ориентира устраняет необходимость наведения на трансфиксационные элементы посредством рентгеновских устройств, таких как излучающие рентгеноскопические аппараты с "с-образным штативом", традиционно используемые для надлежащего дистального размещения винтов при установке тибиальных и бедренных стержней. В ходе недавних исследований была получена оценка эффекта от использования идентификатора 2016 ориентира на уровень радиации и длительность лечения. Исследование показало, что использование идентификатора 2016 ориентира для надлежащего размещения дистального винта позволило на 36 секунд сократить время рентгеноскопического воздействия (0.785 поглощенных доз излучения, или рад) в случае переломов большой берцовой кости и 49 секунд в случае бедренных переломов (2.362 рад). Кроме того, полученные в результате использования идентификатора 2016 ориентира точность и постоянная степень точности при выполнении наведения и фиксации в отношении дистальных винтов позволяют сократить время дистальной фиксации по меньшей мере на 50% по сравнению, например со способами наведения и фиксации дистальных винтов с использованием с-образного штатива.
[0166] В области идентификатора ориентира/генератора поля/сверла 2016, такой как область 2025, можно предусмотреть наличие светового индикатора, сообщающего пользователю о подаче питания к идентификатору ориентира/генератору поля/сверлу 2016. На фиг.41 сверлильная втулка 2022 удалена, и идентификатор 2016 ориентира находится в зацеплении с отверткой 2100 для фиксации имплантата к кости. Как показано на фиг.41, корпус 2018 идентификатора 2016 ориентира может содержать по меньшей мере одно углубление 2018d под пальцы руки, чтобы облегчить пользователю обхват рукой идентификатора 2016 ориентира. Вариантом осуществления с фиг.41 предусмотрено наличие шести углублений. Кроме того, рифление и размеры наружной поверхности корпуса 2018 можно подобрать таким образом, чтобы обеспечить пользователю удобный и надежный захват корпуса 2018. Дополнительно или как альтернативный вариант, идентификатор 2016 ориентира можно выполнить прикрепляемым к инструменту, например к корпусу отвертки 2100.
[0167] При выборе оптимального материала для идентификатора 2016 ориентира с фиг.39, вмещающего генератор поля, можно руководствоваться весом и устойчивостью после нескольких циклов обработки в автоклаве. Можно использовать любой автоклавируемый материал, предпочтительно немагнитные или слабо магнитные материалы во избежание или для минимизации создания помех электромагнитному полю. В качестве примера можно привести, в том числе, следующие материалы: керамика, автоклавируемые полимеры, например полипропилен (РР), сополимер полипропилена (РРСО), поликарбонат (PC), полиметилпентен (РМР), политетрафлуроэтиленовые смолы (PTFE), полметилакрилат (РММА или акриловый полимер), этилен тетрафлуроэтилен (ETFE), этилен хлортрифлуроэтилен (ECTFE), флуро этилен пропилен (FEP), полиэстер имид (РЕ1), перфторалкоксил (PFA), поликетон (РК), полифенилен оксид (РРО), полисульфон (PSF), поливинил хлорид (PVC), поливинилиден флуорид (PVDF), силикон, или термоэластопласт (ТРЕ), а также другие автоклавируемые материалы, выбор которых очевиден для специалистов в данной области техники, в том числе сочетания перечисленных материалов.
[0168] Фиг.42 иллюстрирует другую установочную рукоятку 2122, регулируемый стопор 1801, зонд 2129 и датчик 2126, расположенный внутри или на корпусе 2129а зонда 2129. Установочная рукоятка 2122 прикреплена с возможностью отсоединения к ортопедическому имплантату, например к внутрикостному стержню. Зонд 2129 содержит кабель 2130 и разъем 2131 для соединения с процессором для использования при наведении на ориентиры внутрикостного стержня или другого имплантата. Кроме того, зонд 2129 содержит зажим 2132 для крепления кабеля 2130 к корпусу 2129а, что позволяет предотвратить повреждение датчика 2126 и/или электрического соединения между датчиком 2126 и кабелем 2130 усилиями натяжения, приложенными к кабелю 2130. Регулируемый стопор 1801, а также альтернативный вариант стопора 1803 проиллюстрированы также на фиг.43 и 44. Каждый из стопоров 1801 и 1803 содержит кнопочный привод 1802. Стопор 1801 содержит колесико 1806 под большой палец, используемое для поворота резьбового болта 1807 при креплении стопора 1801 к установочной рукоятке. Стопор 1803 содержит ручку-набалдашник 1804, также соединенную с резьбовым болтом 2531 (фиг.58). Зонд 2129 можно снабдить зубцами или метками, облегчающими пользователю установку зонда 2129 и датчика 2126 в правильное положение.
[0169] В зависимости от конкретного планируемого хирургического подхода, система может содержать различные стопоры, такие как стопоры 1801, 1803. Например, хирургический подход при ретроградном введении внутрикостного стержня может предусматривать использование стопора 1801, причем при антеградном введении внутрикостного стержня возможно предпочтительнее использовать стопор 1803. Для других хирургических подходов могут потребоваться другие варианты.
[0170] Далее, на фиг.45 регулируемый стопор 1803, установочная рукоятка 2123 и зонд 2129 изображены в сборе, с креплением к внутрикостному стержню 2125. Дистальная часть 2124 установочной рукоятки 2123 прикреплена к проксимальной головке 2126 внутрикостного стержня 2125. Установочная рукоятка 2123 соединена с внутрикостным стержнем 2125 посредством канюлированного болта (не показан). В альтернативном варианте установочную рукоятку 2123 можно соединить с внутрикостным стержнем 2125 посредством быстроразъемного соединения или другого крепежного устройства.
[0171] Регулируемый стопор 1803 прикреплен к проксимальной поверхности 2127 установочной рукоятки 2123. Регулируемый стопор 1803 снабжен дополнительной стыковочной частью, что при соединении стопора 1803 с установочной рукояткой 2123 обеспечивает установку или фиксацию стопора 1803 относительно установочной рукоятки 2123 с тремя степенями свободы. Зонд 2129 проведен сквозь отверстие 1805 регулируемого стопора 1803, сквозь дистальную часть 2124 установочной рукоятки 2123, сквозь канюлированный болт и вставлен в трубчатую полость (не показана) внутрикостного стержня 2125. Зонд 2129 содержит датчик 2126 (фиг.42) расположенный вблизи дистального конца (не показан). Датчик 2126 (фиг.42) имеет электрическое соединение с кабелем 2130, содержащим разъем 2131 для передачи сигналов от датчика 2126 (фиг.42) к контрольному модулю (не показан).
[0172] Фиг.46 иллюстрирует регулируемый стопор 1801, установочную рукоятку 2122 и зонд 2129 в сборе, с креплением к внутрикостному стержню 2155. Регулируемый стопор 1801 прикреплен к проксимальной поверхности 2147 установочной рукоятки 2122 путем вращения колесика 1806 под большой палец, обеспечивающего ввинчивание болта 1807 (фиг.43) в резьбовое соединение (не показано), выполненное в установочной рукоятке 2122. Регулируемый стопор 1801 снабжен дополнительной стыковочной частью, что при соединении стопора 1801 с установочной рукояткой 2122 обеспечивает установку или фиксацию стопора 1801 относительно установочной рукоятки 2122 с тремя степенями свободы. Дистальная часть 2144 установочной рукоятки 2122 прикреплена к головке 2156 внутрикостного стержня 2155. Например, установочная рукоятка 2122 соединена с внутрикостным стержнем 2125 посредством канюлированного болта (не показан). Зонд 2129 проведен сквозь отверстие 1808 регулируемого стопора 1801, сквозь дистальную часть 2144 установочной рукоятки 2122, сквозь канюлированный болт и вставлен в головку 2156 внутрикостного стержня 2155.
[0173] Далее, на фиг.47 проиллюстрированы зонд 2161 проксимального наведения и зонд 2171 дистального наведения. Зонд 2161 проксимального наведения содержит полоску 2163 и датчик 2165, расположенный внутри полоски 2163 или на полоске 2163 на заданном расстоянии D1 от контрольной точки R1 полоски 2163. Кроме того, зонд 2161 проксимального наведения содержит зажим 2167 с цветовой маркировкой, указывающей, что зонд 2161 предназначен для наведения на проксимальные ориентиры ортопедического имплантата, такого как внутрикостный стержень 2155 с фиг.46, а также кабель 2169 передачи сигнала от датчика 2165 к контрольному модулю (не показан). Зонд 2171 дистального наведения содержит полоску 2173 большей длины, чем полоска 2163 зонда 2161 проксимального наведения. Внутри полоски 2173 или на полоске 2173 предусмотрен датчик 2175, размещенный на втором заданном расстоянии D2 от контрольной точки R2 полоски 2173. Зонд 2171 дистального наведения также содержит зажим 2177 с цветовой маркировкой, цвет которой отличается от цвета маркировки зажима 2167, и которая указывает на то, что зонд 2171 предназначен для наведения на дистальные ориентиры ортопедического имплантата, такого как внутрикостный стержень 2155 с фиг.46. Для передачи сигнала от датчика 2175 к контрольному модулю (не показан) предусмотрен кабель 2179. Полоска 2163 зонда 2161 проксимального наведения и/или полоска 2173 зонда 2171 дистального наведения могут иметь, в некоторых вариантах осуществления, прямоугольную геометрическую форму, что позволяет ориентировать полоску при размещении в трубчатой полости внутрикостного стержня. Применимы также и овальная, квадратная или круглая геометрические формы. В некоторых вариантах осуществления полоска 2163 и полоска 2173 могут представлять собой пустую металлическую трубку. Вместо зажимов с цветовой маркировкой, в некоторых вариантах осуществления каждый из датчиков 2165 и 2175 соединен с микрочипом программируемого постоянного запоминающего устройства (ППЗУ), на котором сохраняют калибровочные значения смещения и идентификатор, указывающий, используется зонд для проксимального или для дистального наведения. При этом, если каждый из датчиков 2165 и 2175 соединен с процессором, таким как процессор 2327 с фиг.51, процессор автоматически определяет тип планируемого наведения и может отобразить такую информацию на устройстве отображения, таком как дисплей 2326.
[0174] Полоска 2163 и полоска 2173 могут содержать по меньшей мере один изогнутый участок для поджатия по меньшей мере части полоски 2163 и полоски 2173 к стенке трубчатой полости ортопедического имплантата. Смещение участка полоски к стенке трубчатой полости повышает воспроизводимость при установке датчиков 2165 и 2175 относительно ориентиров. В альтернативном варианте зонды 2161 и/или 2171 можно выполнить с размерами, приблизительно равными размерам трубчатой полости внутрикостного стержня или другого имплантата, для использования с которым они предназначены, что будет обеспечивать возможность воспроизводить надлежащее положение датчика внутри трубчатой полости.
[0175] На фиг.48 изображен зонд 2181 наведения, предусмотренный в качестве альтернативы двум зондам с фиг.47 и предназначенный для наведения и на дистальный и на проксимальный ориентир ортопедического имплантата. Зонд 2181 имеет трубчатую форму и выполнен из немагнитного металла, например нержавеющей стали. Зонд 2181 содержит полоску 2183, первый датчик 2185, расположенный внутри дистальной части полоски 2183, а также второй датчик 2186, расположенный внутри проксимальной части полоски 2183. Первый датчик 2185 расположен на расстоянии D3 от контрольной точки R3 полоски 2183, которую можно выполнить в виде выемки или зубца, при этом второй датчик расположен на втором расстоянии D4 от контрольной точки R3.
[0176] Во время использования посредством первого датчика 2185 осуществляют наведение на дистальный ориентир ортопедического имплантата, такой как дистальный блокирующий вырез внутрикостного стержня, при этом посредством второго датчика 2186 осуществляют наведение на проксимальный ориентир ортопедического имплантата, такой как проксимальный блокирующий вырез ортопедического стержня. Некоторыми вариантами осуществления предусмотрено, что конструкция зонда 2181 аналогична конструкции дистального зонда 2171 наведения (фиг.47), с добавлением второго датчика 2186. Кроме того, зонд 2181 содержит зажим 2187, который может иметь цветовую маркировку, отличающую его от зонда 2171 дистального наведения и указывающую, что зонд 2181 можно использовать для наведения как на дистальный, так и на проксимальный ориентир имплантата. Как уже указано, каждый из датчиков 2185 и 2186 можно соединить с ППЗУ или с другим запоминающим устройством, сохраняющим контрольные значения для использования при определении положения идентификатора ориентира, такого как идентификатора 2016 ориентира, относительно ориентира имплантата. ППЗУ также сохраняет идентификаторы, позволяющие процессору определить, каким датчиком был сгенерирован полученный сигнал - дистальным датчиком 2185 или проксимальным датчиком 2186.
[0177] На фиг.49 представлен другой альтернативный вариант зонда 2191. Зонд 2191 содержит корпус 2192 и выдвижной/убираемый элемент 2193, сматываемый внутри корпуса 2192. Датчик 2195, расположенный внутри элемента 2193, можно помещать в первое положение Р1 для наведения на проксимальный ориентир имплантата и во второе положение Р2 для наведения на дистальный ориентир имплантата. В некоторых вариантах осуществления элемент 2193 можно выполнить в виде вогнутой металлической ленты, стремящуюся сохранить по существу прямолинейную форму при выходе из корпуса, но сматываемую внутри корпуса 2192. Например, элемент 2193 может содержать слоеные гибкие стальные бистабильные упругие полосы, так что при выпрямлении для сохранения по существу прямолинейной ориентации внутри упругих металлических полос возникают напряжения, причем при ослаблении напряжения происходит свертывание внутри корпуса 2192. При этом для изготовления указанного элемента могут быть использованы и другие виды материалов, в том числе упругий пластик или резиновые трубки или листы. В другом альтернативном варианте элемент 2192 выполнен из вставленных друг в друга трубчатых сегментов, выдвигаемых и убираемых смещением внутри соседних сегментов трубы. Зонд 2191 может содержать кодовый датчик угла поворота, оптическое устройство или другое измерительное устройство или средство для нахождения текущей длины выхода элемента 2193 из корпуса 2192. Найденное значение длины можно использовать для определения, размещен ли датчик 2195 в требуемом положении, например в первом положении Р1 или во втором положении Р2.
[0178] Далее, на фиг.50 регулируемый стопор 1801 прикреплен к альтернативному варианту установочной рукоятки 2210. Установочная рукоятка 2210 содержит элемент 2211, находящийся в зацеплении с головкой 2156 внутрикостного стержня 2155 (также показанной на фиг. 46). Например для соединения установочной рукоятки 2210 с головкой 2156 можно использовать канюлированный болт (не показан). Установочная рукоятка 2210 содержит датчик 2213 для использования при наведении на проксимальный ориентир стержня 2155, такой как проксимальный блокирующий вырез 2157. Когда установочная рукоятка прикреплена к стержню 2155, датчик 2213 расположен внутри элемента 2211 или на элементе 2211 на заданном расстоянии D5 от проксимального блокирующего выреза 2157. Можно использовать пассивный датчик или датчик с электрическим питанием от внутренней батареи (не показана) или внешнего источника питания (не показан). Датчик 2213 можно установить в отделении, объединенном или составляющем единое целое с элементом 2211, например в наружном отделении 2216. Как вариант, датчик 2213 можно расположить во внутреннем отделении 2213а с фиг.51. Установочная рукоятка 2210 выполнена из пластика, однако другими вариантами предусмотрена возможность использования других материалов.
[0179] Регулируемый стопор 1801 использован с зондом, таким как зонд 2129 (фиг.46), для наведения на дистальные ориентиры стержня 2155, такого как дистальный вырез 2159 (фиг.51). Как уже указано, регулируемый стопор 1801 можно прикрепить к установочной рукоятке 2210 болтом 1807 (фиг.43), входящим в зацепление с резьбовым отверстием 2215, выровненным с продольным сквозным отверстием установочной рукоятки 2210 (не показана), что позволяет провести зонд сквозь установочную рукоятку 2210 и ввести в трубчатую полость 2155а (фиг.51) стержня 2155. Регулируемый стопор 1801 также содержит рычаг 1809, входящий в зацепление с элементом 2211, что предотвращает повороты между регулируемым стопором 1801 и установочной рукояткой 2210.
[0180] На чертежах не проиллюстрировано, однако регулируемый стопор 1803 (фиг.45) можно использовать и с установочной рукояткой, содержащей встроенный датчик для наведения на проксимальные ориентиры имплантата.
[0181] Во время использования ортопедический имплантат, такой как внутрикостный стержень 2155, имплантируют в кость. Установочную рукоятку 2210 можно присоединить к ортопедическому имплантату до или после имплантации. Затем можно использовать идентификатор ориентира для наведения на проксимальные ориентиры ортопедического имплантата.
[0182] В некоторых вариантах осуществления выполняют наведение на дистальные ориентиры раньше, чем на проксимальные ориентиры. Как и в описанных ранее вариантах, установочную рукоятку 2210 можно присоединить к ортопедическому имплантату до или после имплантации. С установочной рукояткой 2210 соединен стопор 1801 или стопор 1803. В стопор вставлен зонд, проведенный сквозь установочную рукоятку 2210 в ортопедический имплантат, такой как стержень 2155. Выполняют наведение на дистальные ориентиры, устанавливают в дистальных ориентирах трансфиксационные элементы для удержания ортопедического имплантата, удаляют зонд, затем выполняют наведение на проксимальные ориентиры.
[0183] На фиг 51 проиллюстрирована система 2300 для наведения на глухой ориентир ортопедического имплантат. Система 2300 содержит регулируемый стопор 1801, зонд 2171 и установочную направляющую 2210 в сборе и с соединением с внутрикостным стержнем 2155, имплантированным в кость В, содержащую трещину F. Внутрикостный стержень 2155 содержит дистальный вырез 2159, проходящий сквозь внутрикостный стержень 2155 и выполненный под вмещение блокирующего крепежного элемента (не показан). Зонд 2171 проводят сквозь вырез или регулируемый стопор 1801, сквозь трубчатую полость 2210а установочной рукоятки 2210 внутрь трубчатой полости 2155а внутрикостного стержня 2155. Зонд 2171 расположен внутри стопора 1801 таким образом, что датчик 2175 находится от дистального выреза 2159 на известном расстоянии. Значение известного расстояния между датчиком 2175 и дистальным вырезом 2159 или другим ориентиром может находиться в диапазоне от нуля до приблизительно 102 миллиметров. В других вариантах осуществления известное расстояние может составлять от приблизительно двух миллиметров до приблизительно 25 миллиметров или от приблизительно трех миллиметров до приблизительно 10 миллиметров. Известное расстояние в изображенном варианте осуществления составляет около пяти миллиметров.
[0184] Кроме того, система 2300 содержит инструмент, например дрель 2310 со сверлом 2311. Идентификатор 2016 ориентира может входить в зацепление с дрелью 2310 и/или сверлом 2311 таким образом, что положение и ориентацию идентификатора 2016 ориентира можно использовать для определения положения и ориентации дрели 2310 и/или сверла 2311. Например, корпус идентификатора 2016 ориентира можно снабдить средством фрикционного зацепления с дрелью 2310, хомутом или другим крепежным средством для по меньшей мере временного прикрепления указанного идентификатора 2016 ориентира к дрели 2310. В других вариантах осуществления идентификатор 2016 ориентира можно выполнить как компонент дрели 2310 или другого инструмента. Некоторыми вариантами осуществления предусмотрено использование телескопической сверлильной втулки (не показана), обеспечивающей пользователю возможность подвода конца сверлильной втулки к пациенту, а также продольного перемещения сверла при сверлении.
[0185] Функционирующая система 2320 наведения обеспечивает пользователю, например хирургу, указание относительного положения инструмента, такого как дрель 2310 со сверлом 2311, относительно дистального выреза 2159. Система 2320 наведения содержит корпус 2321, порт 2322 первого датчика, порт 2323 второго датчика, порт 2324 генератора поля, устройство 2325 отображения и процессор 2327. Порт 2322 первого датчика предназначен под вмещение разъема кабеля 2179 зонда 2171, что обеспечивает получение системой 2320 наведения сигналов, генерируемых датчиком 2175. Порт 2323 второго датчика предназначен под вмещение разъема кабеля 2214, соединенного с датчиком 2213 установочной рукоятки 2210, что обеспечивает получение системой 2320 наведения сигналов, генерируемых датчиком 2213. Порт 2324 генератора поля предназначен под вмещение разъема кабеля 2019 идентификатора 2016 ориентира, что позволяет системе 2320 наведения передавать по кабелю 2019 сигналы для управления работой генератора поля идентификатора 2016 ориентира. Устройство 2325 отображения предназначено для вывода изображения графического интерфейса 2326 пользователя, отображающего положение и ориентацию дрели 2310 относительно положения и ориентации ориентира внутрикостного стержня 2155, такого как дистальный вырез 2159, проксимальный вырез 2157 (фиг.50), или другого ориентира.
[0186] Функционирующий процессор 2327 обеспечивает прием сигналов от дистального датчика 2175 и/или от проксимального датчика 2213 и определение, на основании принятого сигнала или сигналов, текущего положения и ориентации идентификатора 2016 ориентира относительно выбранного ориентира внутрикостного стержня 2155. Например, характеристику сигнала, полученного от дистального датчика 2175, например одно или несколько значений силы индуцированного электрического тока, процессор 2327 может использовать для определения расстояния между идентификатором 2016 ориентира и датчиком 2175, а также ориентации магнитного момента поля, генерируемого идентификатором 2016 ориентира. Например, датчик 2175 может передавать сигнал, указывающий силу тока, и идентификатор, указывающий, которая из множества индукционных катушек выработала соответствующее значение тока. Процессор 2327 может сравнивать полученные значения силы тока с контрольными значениями для каждой индукционной катушки, определяя таким образом разницу между принятыми и контрольными значениями. Контрольные значения могут представлять собой значения силы индуцированного тока, соответствующие контрольному сигналу генерируемого поля, контрольному положению и контрольной ориентации идентификатора 2016 ориентира. Процессор 2327 использует полученные значения разности между принятыми и контрольными величинами для определения значений разности между положением и ориентацией идентификатора 2016 ориентира и контрольным положением и ориентацией, исходя из любого установленного значения разности между магнитным полем, генерируемым идентификатором 2016 ориентира и контрольным полем. На основании различия между положением и ориентацией идентификатора 2016 ориентира и контрольного положения и ориентации, процессор 2327 может определять текущие положение и ориентацию идентификатора 2016 ориентира относительно датчика 2175.
[0187] Текущие расстояние и ориентация идентификатора 2016 ориентира относительно датчика 2175 используются процессором 2327 для определения текущего расстояния идентификатора 2016 ориентира от дистального выреза 2159 и текущей ориентации магнитного момента генерируемого магнитного поля относительно центральной оси, проходящей через дистальный вырез 2159. Например, процессор 2327 определяет текущее расстояние и относительную ориентацию идентификатора 2016 ориентира относительно дистального выреза 2159 на основании известного положения и ориентации дистального выреза 2159 относительно дистального датчика 2175. Процессор 2327 также определяет текущее положение дрели 2310 со сверлом 2311 относительно дистального выреза 2159, а также текущую ориентацию дрели 2310 и сверла 2311 относительно центральной оси, проходящей через дистальный вырез 2159, на основании известного положения и ориентации сверла 3210 и сверла 2311 относительно местоположения идентификатора 2016 ориентира и магнитного момента поля, генерируемого идентификатором 2016 ориентира. В случае идентификатора 2016 ориентира, продольная ось сверла 2311 коаксиальна магнитному моменту магнитного поля, генерируемого идентификатором 2016 ориентира.
[0188] Процессор генерирует графический интерфейс 2326 пользователя на основании определенного текущего положения и ориентации дрели 2310 и сверла 2311 относительно дистального выреза 2159 или на основании текущего положения и ориентации другого инструмента относительно другого ориентира. Графический интерфейс 2326 пользователя содержит первый участок 2326а, содержащий изображение 2155b внутрикостного стержня, отображающее внутрикостный стержень 2155, и содержит изображение 2159а дистального выреза, на котором виден дистальный вырез 2159. Кроме того, первый участок 2326а графического интерфейса 2326 пользователя содержит индикатор 2330 ориентации, содержащий первую окружность 2331, вторую окружность 2333 и линию 2335, пересекающую центры первой окружности 2331 и второй окружности 2333.
Линия 2335 показывает пользователю текущую ориентацию сверла 2311 относительно центральной оси, проходящей через дистальный вырез 2159. В частности, как показано на фиг. 51, когда обе окружности - первая окружность 2331 и вторая окружность 2333 - расположены внутри изображения 2159а дистального выреза, это означает, что продольная ось сверла 2311 коаксиальна центральной оси, проходящей через дистальный вырез 2159. Графический интерфейс 2326 пользователя содержит также второй участок 2326Ь, содержащий изображение 2155Ь внутрикостного стержня и изображение 2331 b сверла. Текущее положение и ориентация сверла 2311 относительно внутрикостного стержня 2155 отображены на втором участке 2326Ь графического интерфейса 2326 пользователя.
[0189] Во время использования зонд 2155, установочная рукоятка 2210, регулируемый стопор 1801, идентификатор 2016 ориентира, дрель 2310, и сверло 2311 могут быть стерилизованы, например посредством обработки в автоклаве, если по меньшей мере один из указанных компонентов не являются стерильным. После стерилизации зонд 2155 соединяют с портом 2322 первого датчика системы 2320 наведения, а установочную рукоятку 2210 соединяют с портом 2323 второго датчика системы 2320 наведения. Процессор 2327 распознает соединение дистального датчика 2175 и проксимального датчика 2213 и может при необходимости обеспечить отображение индикатора, соответствующего надлежащему (или ненадлежащему) соединению зонда 2155 и установочной рукоятки 2210 и/или индикатора надлежащего (или ненадлежащего) функционирования дистального датчика 2175 и проксимального датчика 2213. Аналогичным образом идентификатор 2016 ориентира соединен с портом 2324 генератора поля, при этом процессор может распознавать соединение идентификатора 2016 ориентира и обеспечивать отображение надлежащего (или ненадлежащего) соединения идентификатора 2016 ориентира и/или надлежащего (или ненадлежащего функционирования генератора поля идентификатора 2016 ориентира. Датчик 2175 соединен с микрочипом программируемого постоянного запоминающего устройства (ППЗУ), сохраняющим калибровочные значения и идентификатор, указывающий, что датчик 2175 является дистальным датчиком наведения. При соединении датчика с процессором 2327, процессор 2327 автоматически идентифицирует тип намеченного наведения и может отобразить на графическом интерфейсе 2326 пользователя индикацию о наличии соединения с датчиком идентифицированного типа.
[0190] Установочная рукоятка 2210 приведена зацепление с внутрикостным стержнем 2155, при этом в зацеплении с установочной рукояткой 2210 приведен регулируемый стопор 1801. Затем в регулируемый стопор 1801 вставляют и размещают в требуемом положении зонд 2155. Манипулируя кнопкой 1802, можно регулировать установку зонда 2155, при этом после установки зонда 2155 в требуемом положении кнопку 1802 отпускают. Например, зонд 2155 можно вставлять до тех пор, пока контрольная метка, такая как печатная метка или зубец или другой конструктивный элемент зонда 2155, не будет должным образом размещена относительно контрольного участка регулируемого стопора 1801. За счет установки зонда 2155 обеспечено размещение дистального датчика 2175 в правильном положении относительно дистального выреза 2159.
[0191] Выбирают сверлильную втулку 2022 и вводят ее в зацепление с насадкой 2020 сверлильной втулки идентификатора 2016 ориентира. При этом выбирают, например, либо короткую сверлильную втулку, либо длинную сверлильную втулку. Информацию о сделанном выборе вводят в систему 2320 наведения, например путем взаимодействия с меню 2326с графического интерфейса 2326 пользователя. Дополнительно данные о конкретном внутрикостном стержне 2155, установочной рукоятке 2210, регулируемом стопора 1801 и/или зонда 2171 вводят в систему 2320 наведения в случае, если таковые не распознаются системой 2320 наведения автоматически, и/или для подтверждения конкретного внутрикостного стержня 2155, установочной рукоятки 2210, регулируемого стопора 1801 и/или зонда 2171.
[0192] Точность системы 2320 наведения проверяют до начала имплантации внутрикостного стержня 2155 путем размещения идентификатора 2016 ориентира непосредственно над дистальным вырезом 2159 внутрикостного стержня 2155, что можно осуществить путем ввода кончика 2024 сверлильной втулки 2022 в дистальный вырез 2159. Если вторая окружность 2333 отображается внутри изображения 2159а дистального выреза, при этом ориентация линии 2335 соответствует ориентации сверлильной втулки 2022, система 2320 наведения является точной. Если же система наведения не является точной, проверяют введенные данные о выбранных компонентах и/или положение зонда 2171. Если ошибок не обнаружено, систему 2320 наведения калибруют заново, как описано ниже с ссылками на фиг.52.
[0193] После сборки компонентов и описанной выше проверки внутрикостный стержень 2155 имплантируют в кость В. Когда внутрикостный стержень 2155 размещен в требуемом положении, кончик 2024 сверлильной втулки 2022 находится над дистальным вырезом 2159. Когда идентификатор 2016 ориентира приближают к датчику 2175, сигнал, генерируемый датчиком 2175, принимается процессором 2327, при этом по меньшей мере одна характеристика сигнала, такое как сила тока и идентификатор, используются процессором для определения того, что происходит дистальное наведение, и что система 2320 наведения входит в режим определения дистального местоположения. Установку кончика 2024 относительно дистального выреза 2159, скрытого внутри кости В, пользователь выполняет, обращаясь к графическому интерфейсу 2326 пользователя в режиме определения дистального местоположения, при этом установку считают подтвержденной, если первая окружность 2331 и вторая окружность 2333 расположены внутри изображения 2159а дистального выреза.
[0194] На месте расположения дистального выреза 2159 выполняют разрез в коже. Затем в вставляют в полученный разрез сверлильную втулку 2022, доводя ее до кости В. Затем пользователь передвигает идентификатор 2016 ориентира до помещения первой окружности 2331 и второй окружности 2333 целиком внутри изображения 2159а дистального выреза и, сохраняя положение и ориентацию идентификатора 2016 ориентира, вводит сквозь сверлильную втулку 2022 сверло 2311 и просверливает кость В, проходя сквозь дистальный вырез 2159 до кортикального слоя дальней стороны кости В. Требуемую глубину сверления можно обеспечить путем обращения пользователя ко второму участку 2326b графического интерфейса 2326 пользователя или сравнения по меньшей мере одной контрольной метки, которой снабжено сверло 2311, с контрольным участком идентификатора 2016 ориентира.
[0195] Затем сверло 2311 убирают, и через сверлильную втулку 2022 вводят в зацепление с костью В и дистальным вырезом 2159 блокирующий крепежный элемент (не показан), также сохраняя первую окружность 2331 и вторую окружность 2333 внутри изображения 2159а дистального выреза. Требуемую глубину ввода блокирующего крепежного элемента можно обеспечить путем обращения пользователя ко второму участку 2326Ь графического интерфейса 2326 пользователя или сравнения контрольной маркировки на инструменте (не показан) для установки крепежного элемента с контрольным участком идентификатора 2016 ориентира, как описано выше.
[0196] Помимо зацепления блокирующего крепежного элемента с дистальным вырезом 2159, систему 2320 наведения можно использовать для наведения на проксимальный ориентир внутрикостного стержня 2155. Например, до или после введения блокирующего крепежного элемента в зацепление с дистальным вырезом 2159 и костью В, пользователь может выбрать в меню 2326с датчик 2213 или переместить идентификатор 2016 ориентира в пределах заранее заданного расстояния датчика 2213, что приведет к переходу системы 2320 наведения в режим проксимального наведения и выводу отображения положения и ориентации дрели 2300 и/или сверла 2016 относительно проксимального ориентира внутрикостного стержня 2155, такого как проксимальный вырез 2157 (фиг. 50). Затем пользователь может ввести в зацепление с проксимальным ориентиром крепежный элемент или другой инструмент или имплантат аналогично тому, как уже было описано в отношении сверления сквозь дистальный вырез 2159 и/или введения в зацепление блокирующего крепежного элемента с дистальным вырезом 2159.
[0197] Как уже указано, посредством системы 2320 наведения и датчика 2213 можно выполнить наведение на проксимальный ориентир до или после наведения на дистальный ориентира, такой как дистальный вырез 2159. В частности, на проксимальный ориентир можно навестись до ввода зонда 2171 внутрь регулируемого стопора 1801, установочной рукоятки 2210 и/или внутрикостного стержня 2155. На проксимальный ориентир можно навестись и после удаления зонда 2171, или при введении зонда 2171 внутрь регулируемого стопора 1801, установочной рукоятки 2210, и/или внутрикостного стержня 2155. Например, как уже указано выше, зонд 2171 можно ввести сквозь участок внутрикостного стержня 2155, не мешающий образованию зацепления со сверлом 2311 или с крепежным элементом, снабженным проксимальным вырезом, или с другим проксимальным ориентиром. Кроме того, если зонд 2171 вводят в трубчатую полость 2155а, и через трубчатую полость 2155а также проходит проксимальный вырез, трубчатую полость 2155а можно выполнить достаточно большой, чтобы обеспечить одновременное вмещение крепежного элемента или сверла 2311 и зонда 2171. Например, размеры зонда 2171 можно подобрать под размещение в зазоре между сверлом 2311 и внутренней стенкой внутрикостного стержня 2155, ограничивающей трубчатую полость 2155а. Аналогичным образом в трубчатую полость 2155а можно вставить зонд 2181 (фиг.48), снабженный и дистальным датчиком 2185 и проксимальным датчиком 2186, и выполнять наведение и на дистальный и на проксимальный ориентиры внутрикостного стержня 2155 без удаления или регулировки зонда 2181.
[0198] В альтернативном варианте наведение на проксимальный ориентир внутрикостного стержня 2155 можно осуществлять, используя систему 2320 наведения и либо датчик 2175 зонда 2171, либо датчик 2165 зонда 2161 (фиг.47). Например, после ввода блокирующего фиксатора в зацепление с дистальным вырезом 2159, зонд 2171 можно регулировать, используя регулируемый стопор 1801 для крепления датчика 2175 в заданном положении относительно по меньшей мере одного проксимального ориентира внутрикостного стержня 2155. Затем с помощью меню 2326с можно выбрать режим проксимального наведения, предусматривающий отображение системой 2320 наведения положения и ориентации дрели 2310 и/или сверла 2311 (или другого инструмента или имплантата) относительно проксимального ориентира или ориентиров. Аналогичным образом, в частности, если нежелательно, чтобы часть зонда 2171 выступала за регулируемый стопор 1801, зонд 2161 можно соединить с системой 2320 наведения, вставив его в регулируемый стопор 1801, что обеспечит размещение датчика 2165 в известном положении относительно по меньшей мере одного проксимального ориентира внутрикостного стержня 2155. В обоих случаях можно затем выполнить наведение по меньшей мере на один проксимальный ориентир внутрикостного стержня, используя систему 2320 наведения, как было описано выше. Другими вариантами осуществления предусмотрена возможность наведения на проксимальный ориентир или ориентиры до дистального выреза 2159, с использованием зонда 2171 или зонда 2161.
[0199] На фиг.52 изображен калибровочный элемент 2340, прикрепленный к идентификатору 2016 ориентира и внутрикостному стержню 2155, для использования при калибровке системы 2320 наведения. Например, если точность системы 2320 наведения проверили до введения внутрикостного стержня 2155 и нашли погрешность, можно выполнить повторную калибровку системы 2320 наведения. При использовании калибровочный элемент 2340 вводят в зацепление с идентификатором 2016 ориентира. Затем кончик 2341 вставляют в дистальный вырез 2159 до упора контрольного участка (не показан) калибровочного элемента 2340 во внутрикостный стержень 2155. Затем можно выполнить повторную калибровку системы 2320 наведения, используя для этого меню 2326с графического интерфейса 2326 пользователя. Например, в меню 2326с можно выбрать опцию "повторная калибровка", что приведет к передаче системой 2320 наведения управляющего сигнала на генератор поля идентификатора 2016 ориентира и к сохранению в качестве контрольных значений любых текущих значений, принятых от датчика 2175 зонда 2171. Графический интерфейс 2326 пользователя может отображать индикатор, сообщающий об успешной повторной калибровке системы 2320 наведения.
[0200] Далее, на фиг.53-57 проиллюстрированы детали регулируемого стопора 1801. Регулируемый стопор 1801 содержит корпус 2401, снабженный отверстием 2402 под зажимной элемент. Отверстие 2402 под зажимной элемент предназначено для вмещения зажимного элемента 2411, поджатого пружиной 2413. Зажимной элемент 2411 удерживается в корпусе 2401 посредством штырей 2415. Кроме того, зажимной элемент 2411 содержит отверстие 2417 под привод, соединительный вырез 2418, а также вырез 2419 под зонд.
[0201] Кнопка 1802 содержит приводной валик 2421 и приводную прорезь 2423. Приводной валик 2421 вводят в отверстие 2405 корпуса 2401 и посредством пружины 2425 поджимают противоположно направлению установки в корпус. В собранном виде приводной валик 2421 введен в приводную прорезь 2417 зажимного элемента 2411 и удерживается в корпусе 2401 посредством соединительного штыря 2427, вставленного в приводную прорезь 2423 приводного валика 2421 сквозь отверстие 2403 корпуса 2401 и сквозь соединительный вырез 2418 зажимного элемента 2411. Во время использования, когда кнопку 1802 нажимают, противодействуя усилию пружины 2425, соединительный штырь 2427 перемещается внутри приводной прорези 2423, что приводит к давлению зажимного элемента 2411 на пружину 2413, позволяющему ввести зонд в отверстие 1808 и сквозь вырез 2419 под зонд. После установки зонда и отпускания кнопки 1802, пружины 2413 и 2425 прижимают зажимной элемент 2411 к зонду, что обеспечивает удержание положения зонда внутри отверстия 1808.
[0202] Колесико 1806 под большой палец размещают внутри прорези 2407 под колесико под большой палец, выполненное в корпусе 2401, при этом болт 1807 проводят сквозь отверстие 2409 под болт, выполненное в корпусе 2401, и ввинчивают в резьбовое отверстие 2431 указанного колесика 1806. После того как болт 1807 ввинчен в отверстие 2431, сквозь отверстие 2435 (фиг.56) указанного колесика 1806 проводят штырь 2433 и вставляют штырь 2433 в прорезь болта 1807 (фиг.56) для удержания болта 1807 в зацеплении с указанным колесиком 1806 под большой палец.
[0203] Далее, на фиг.58-62, проиллюстрированы детали регулируемого стопора 1803. Регулируемый стопор 1803 содержит корпус 2501, снабженный прорезью 2502 под зажимной элемент. Зажимной элемент 2511 размещают внутрь прорези 2502 под зажимной элемент и поджимают пружиной 2513. Зажимной элемент 2511 удерживается в корпусе 2501 посредством штырей 2515. Кроме того, зажимной элемент 2511 содержит прорезь 2517 под привод, соединительный вырез 2518 и вырез 2519 под зонд.
[0204] Кнопка 1802 содержит приводной валик 2421 и приводную прорезь 2423. Приводной валик 2421 вводят в отверстие 2405 корпуса 2401 и посредством пружины 2525 поджимают противоположно направлению установки в корпус. В собранном виде приводной валик 2421 введен в приводную прорезь 2517 зажимного элемента 2511 и удерживается в корпусе 2501 посредством соединительного штыря 2527, вставленного в приводную прорезь 2423 приводного валика 2421 сквозь отверстие 2503 корпуса 2401 и сквозь соединительный вырез 2418 зажимного элемента 2511. Во время использования, когда кнопку 1802 нажимают, противодействуя усилию пружины 2525, соединительный штырь 2527 перемещается внутри приводной прорези 2423, что приводит к давлению зажимного элемента 2511 на пружину 2513, позволяющему ввести зонд в отверстие 1805 и сквозь вырез 2519 под зонд. После установки зонда и отпускания кнопки 1802, пружин 2513 и 2525 прижимают зажимной элемент 2511 к зонду, что обеспечивает удержание положения зонда внутри отверстия 1805.
[0205] В отверстие 2509 под болт, выполненное в корпусе 2501, ввинчен резьбовой болт 2531 зажимной ручки 1804 для прикрепления регулируемого стопора 1803 к установочной рукоятке.
[0206] Калибровку системы можно выполнить во время изготовления, после продажи или непосредственно перед имплантацией имплантата. Этап калибровки аналогичен регистрации в служебном компьютере клиники. Необходимость калибровки может обусловливаться различными причинами. Например, может потребоваться калибровка датчика для исправления погрешностей изготовления. Систему можно выполнить на основе модели для автоматизированного проектирования, и использовать калибровку для точного взаимного размещения датчиков. Процессор или контрольный модуль может содержать программное обеспечение для генерации значений смещения по X, Y, Z, а также углам тангажа, крена и рыскания для определения положения датчиков в общей системе координат или просто определения взаимного положения датчиков. Систему можно изготовить и откалибровать во время изготовления и приписать ей уникальный идентификатор, такой как серийный номер, цветовая кодировка, штрих-код или RFID-метку. Если требуется выполнить повторную калибровку системы, уникальный идентификатор можно использовать для получения значений смещения локально или по сети. Кроме того, уникальный идентификатор можно использовать для получения других данных, таких как размеры внутрикостного стержня или длина внутрикостного стержня и/или зонда.
[0207] Помимо наведения на глухие винтовые отверстия имплантируемого внутрикостного стержня, системы обнаружения ориентира можно использовать и для решения других задач, к которым относятся, не ограничиваясь перечисленным, наведение на блокировочные винты и выравнивание направляющих штырей. Одним из способов предусмотрено, что блокировочные винты (poller-винты) можно вставлять в кость непосредственно снаружи по касательной к стержню или к штоку. Объекты наведения отображаются на экране в виде двух линий с противоположных сторон стержня, например переднезадней или медиально-латеральной, со смещением относительно стержня на расстояние, например, 2,5 мм. Хирург выравнивает идентификатор ориентира с одной из линий, в зависимости от анатомической стороны, с которой требуется установить блокировочный винт. Для отображения объектов наведения на экране можно использовать другие символы или индикацию, такие как точки, целеуказатели или сочетания указанных элементов. Для решения этой задачи можно использовать устройства, вводимые в медуллярный канал и снабженные датчиком или датчиками в качестве средств наведения на блокировочные винты, в том числе, не ограничиваясь перечисленным, зонд, переходник или шило. Изображенные системы обнаружения ориентира можно также использовать для выравнивания или центрирования направляющего штыря и в плоскости А-Р и в плоскости M-L при установке стягивающего винта на проксимальном участке бедренного стержня. Один из примерных вариантов осуществления такой системы может содержать датчик, размещенный с соблюдением известных относительных ориентации и положения в установочной рукоятке и/или направляющей сверла и/или выравнивающей колодке, прикрепленной с возможностью отсоединения к проксимальному участку бедренного стержня.
[0208] Хотя фиг.1 иллюстрирует гнездо для фиксации первого датчика к имплантату, для взаимной фиксации указанных элементов можно использовать и другие конструктивные элементы и/или способы. Например, как проиллюстрировано на фиг.42, для установки первых датчиков в надлежащем положении можно использовать зонды различной длины. Регулируемые стопоры 1801, 1803 с фиг.41-42 можно использовать для точной установки датчика 2126 в имплантате 30.
[0209] Хотя в данном описании приведены только конкретные варианты осуществления, на его основании специалистам в данной области техники будут очевидны альтернативные варианты и модификации. Такие технические решения, а также другие альтернативные варианты следует считать аналогичными и входящими в объем испрашиваемой правовой охраны и прилагаемой формулы заявленного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕЛЬЕФНОГО ОРИЕНТИРА | 2010 |
|
RU2556972C2 |
| НАЦЕЛИВАНИЕ НА ОПОЗНАВАТЕЛЬНЫЕ ТОЧКИ ОРТОПЕДИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2627677C2 |
| Способ послеоперационной динамизации проксимального бедренного штифта | 2024 |
|
RU2821781C1 |
| Способ и инструменты для сборки бедренного ортопедического протеза | 2018 |
|
RU2772934C2 |
| СПОСОБ И ИНСТРУМЕНТЫ ДЛЯ СБОРКИ ОРТОПЕДИЧЕСКОГО ПРОТЕЗА | 2018 |
|
RU2772936C2 |
| КОНСТРУКЦИЯ ВНУТРИКОСТНОГО ДЕНТАЛЬНОГО ИМПЛАНТАТА | 1998 |
|
RU2178682C2 |
| СИСТЕМА ОРТОПЕДИЧЕСКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА ДЛЯ ХИРУРГИЧЕСКОЙ ПОДГОТОВКИ БЕДРЕННОЙ КОСТИ ПАЦИЕНТА | 2017 |
|
RU2740729C2 |
| ХИРУРГИЧЕСКОЕ СВЕРЛО | 2017 |
|
RU2741718C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ УПРАВЛЯЕМОГО РАЗМЕЩЕНИЯ ИГОЛЬНЫХ КОНСТРУКЦИЙ В ТКАНИ | 2013 |
|
RU2747356C2 |
| СТОМАТОЛОГИЧЕСКИЙ ИМПЛАНТАТ | 1999 |
|
RU2157671C1 |
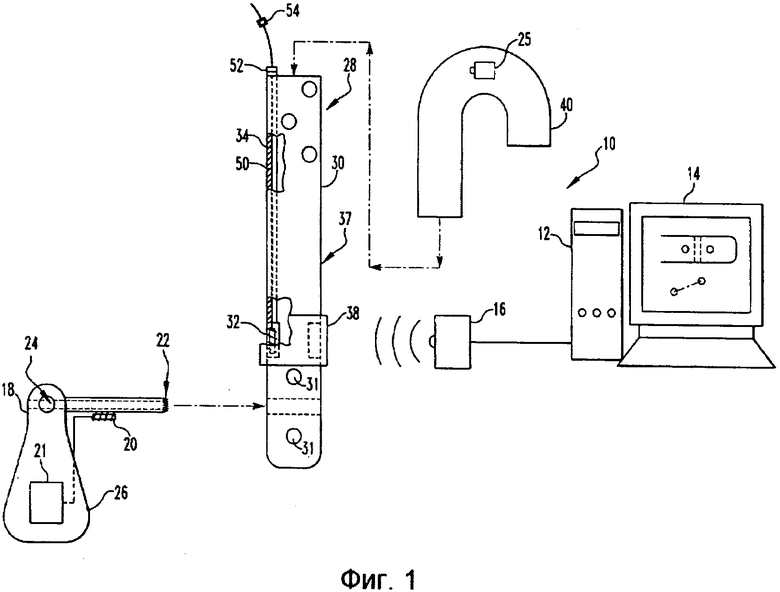
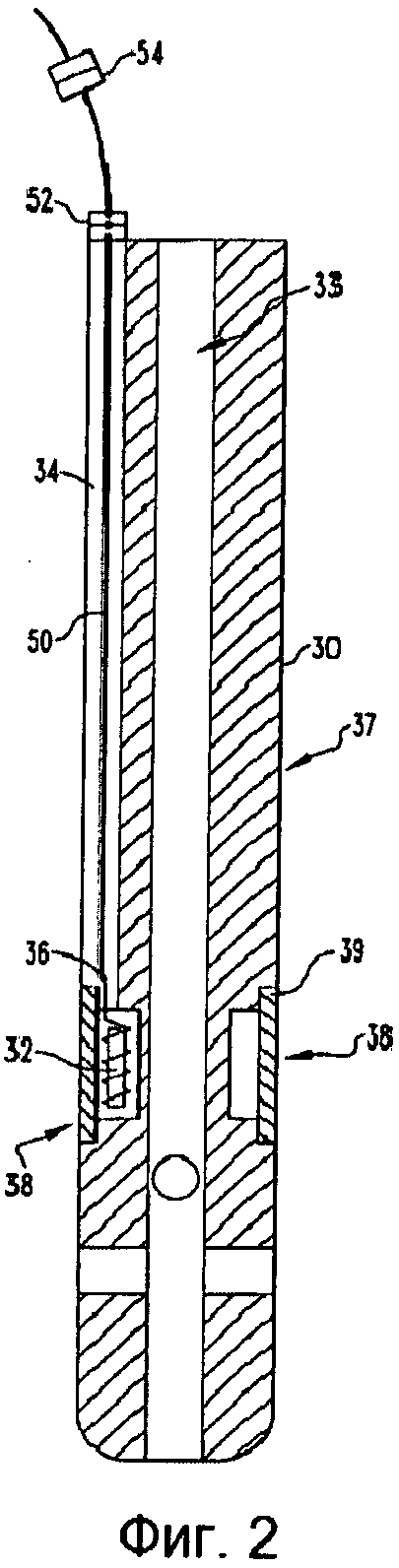
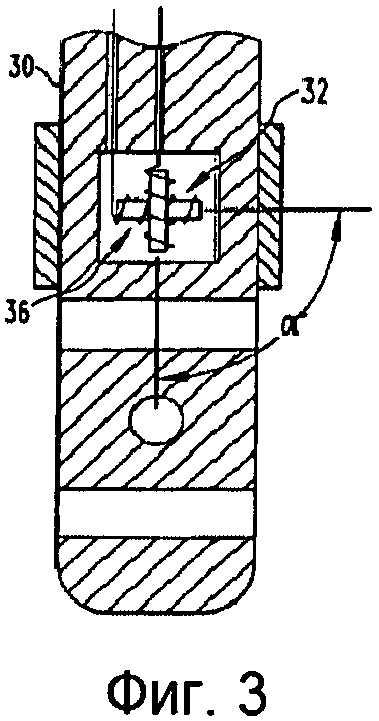
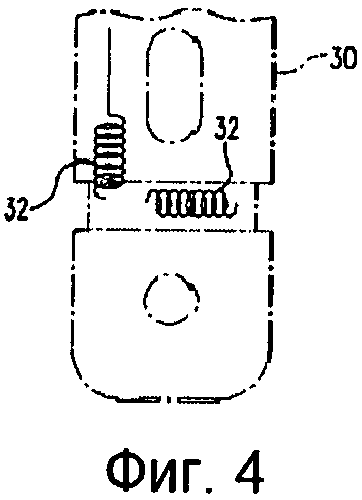
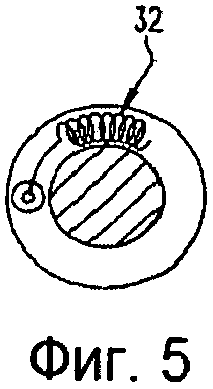


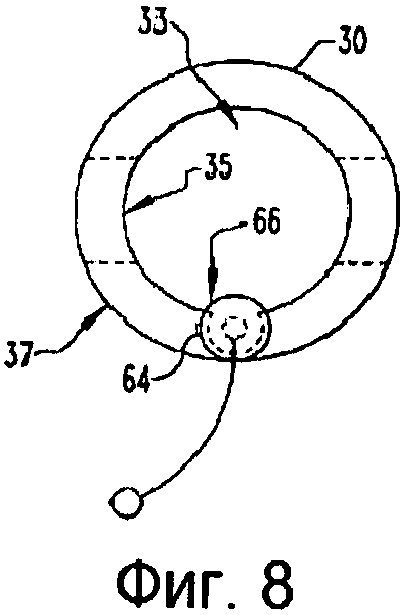
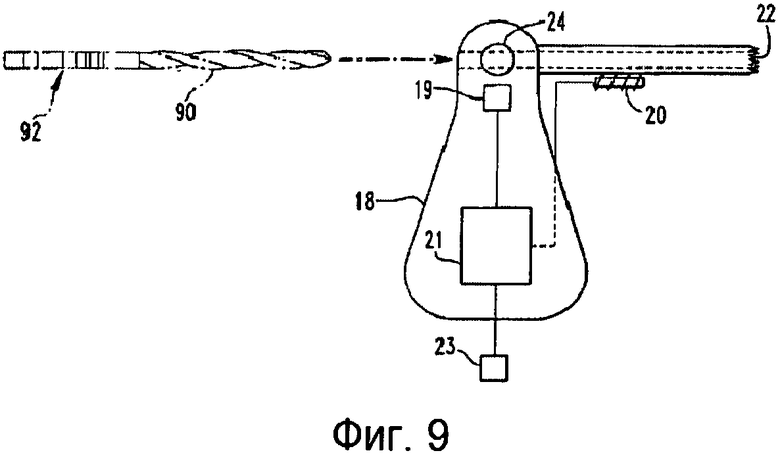
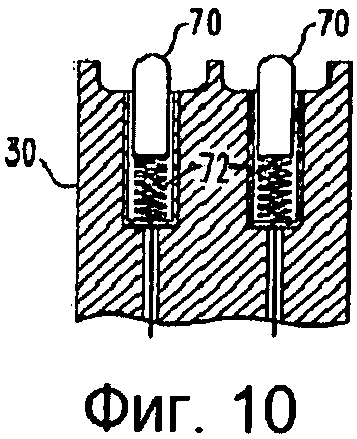

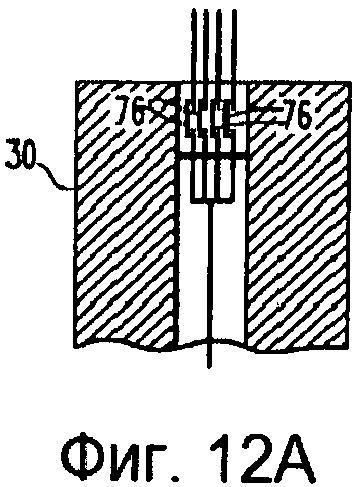
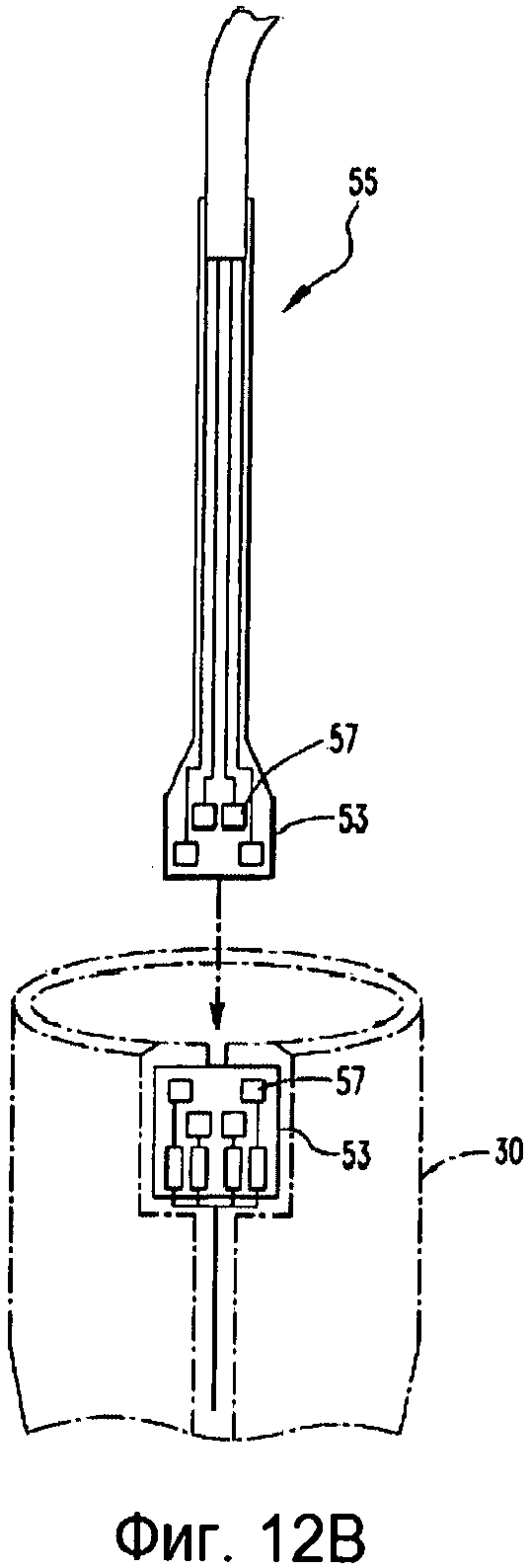

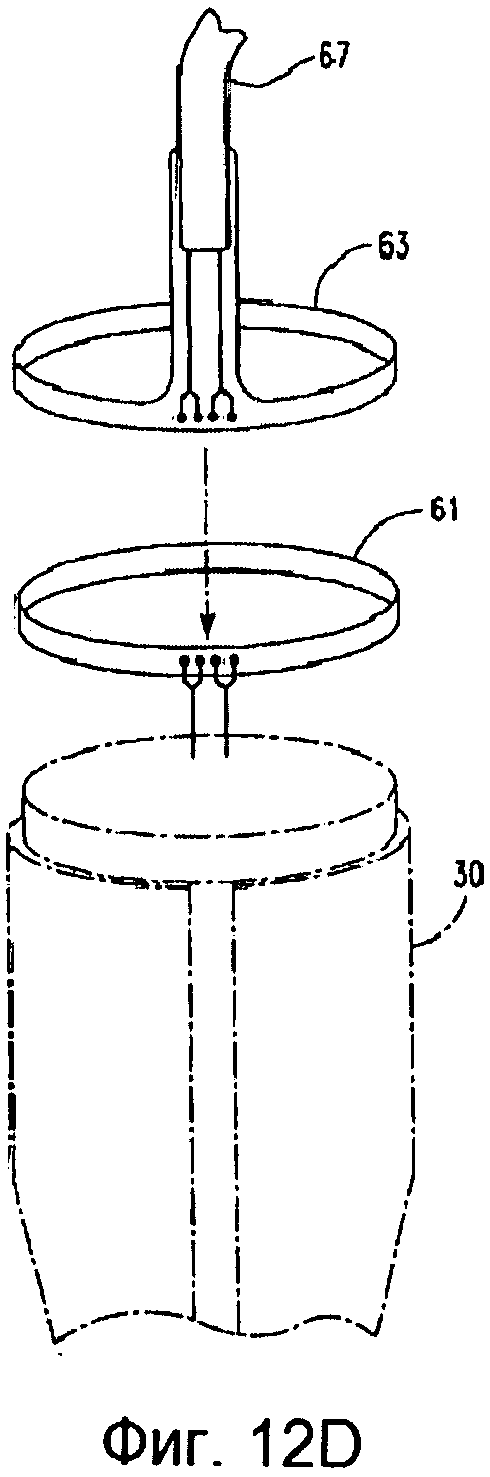
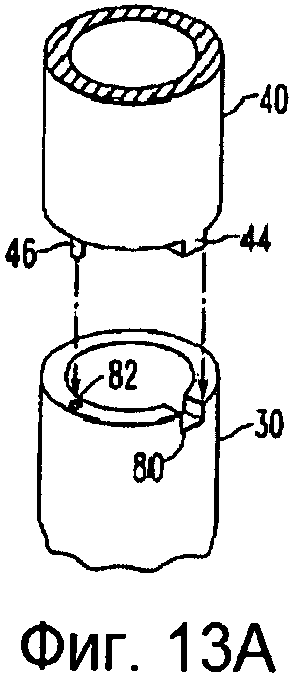
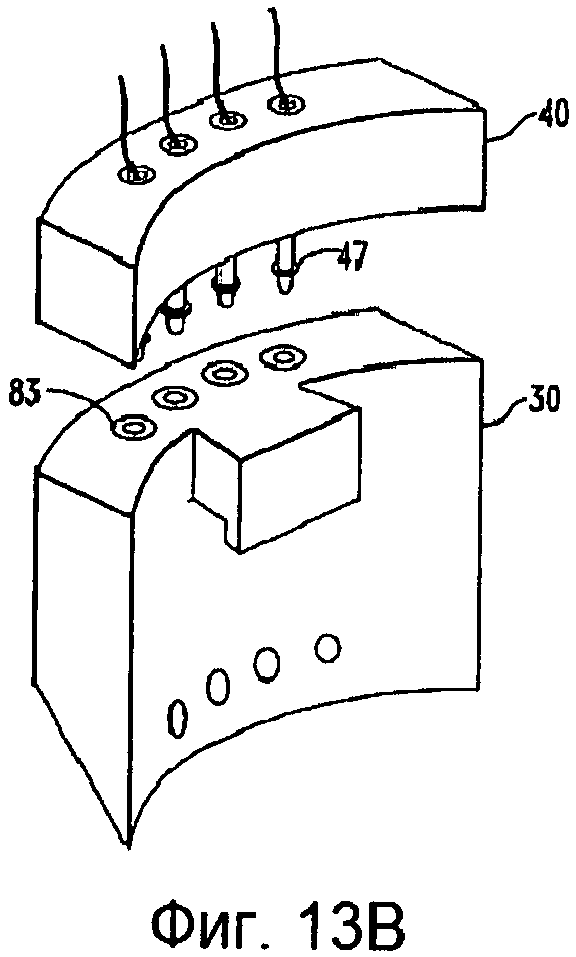
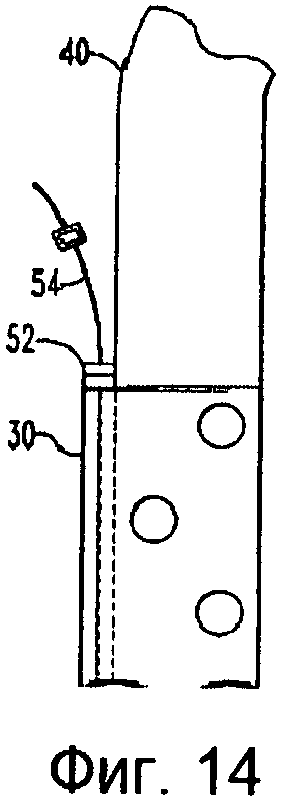

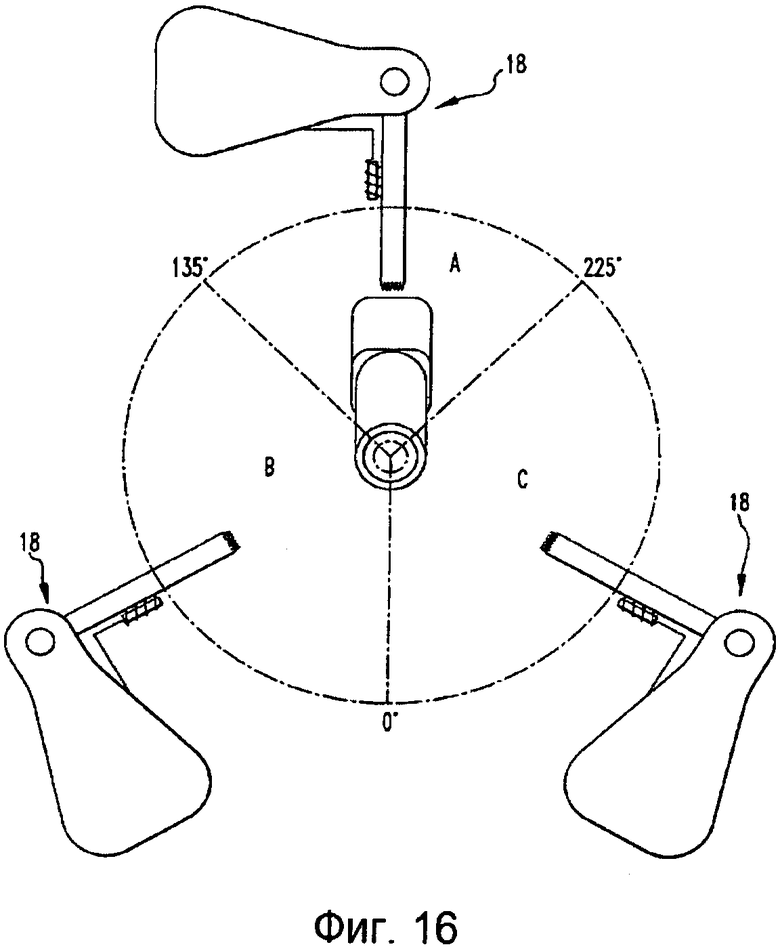
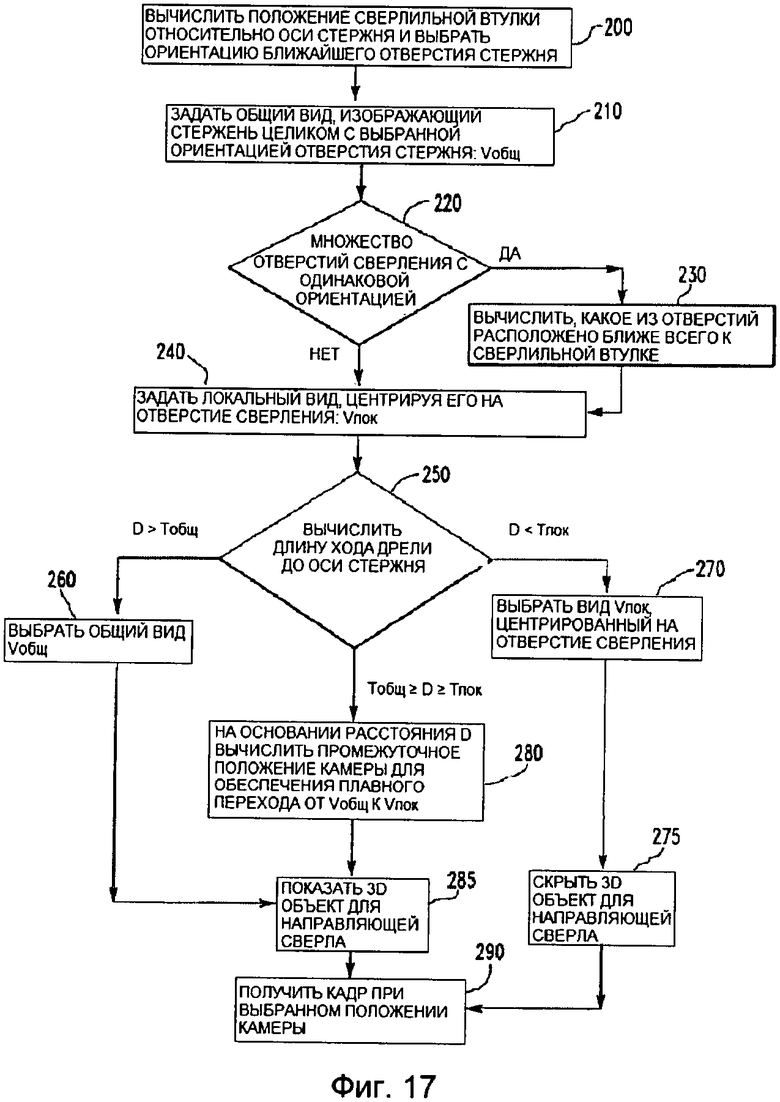
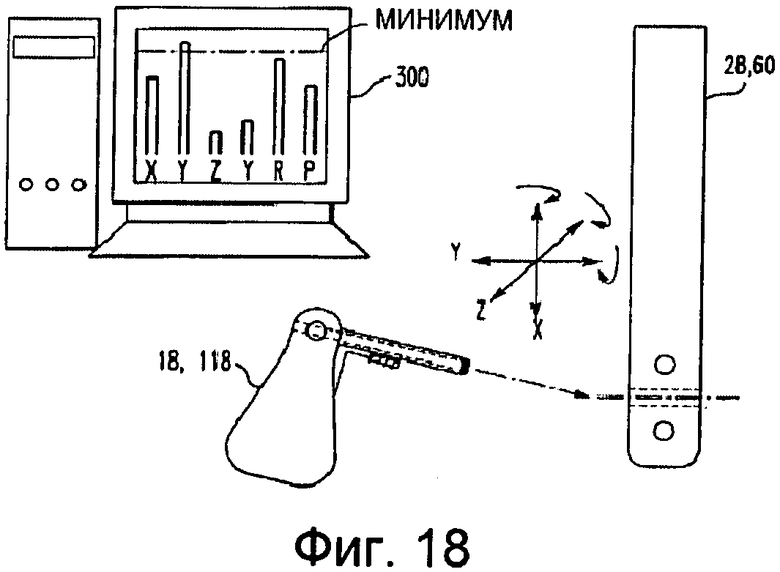


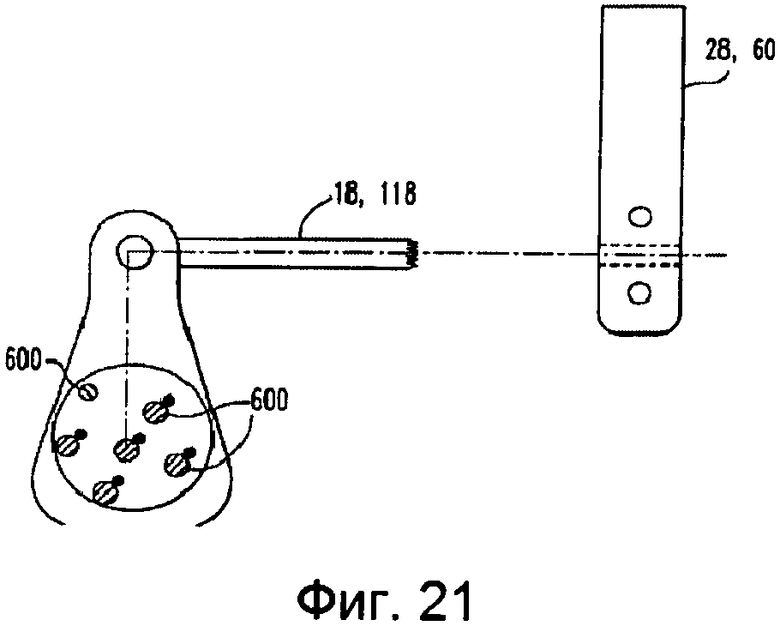
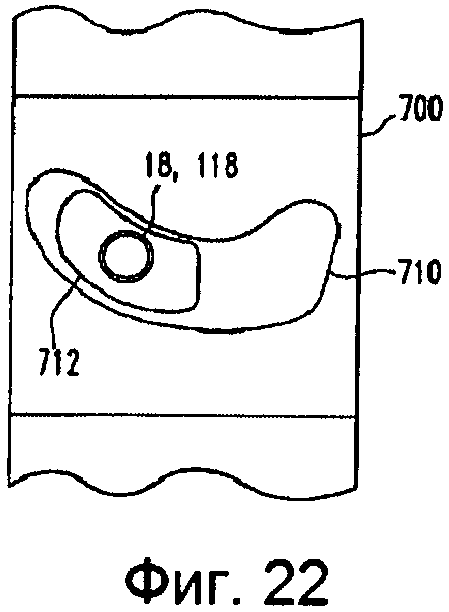
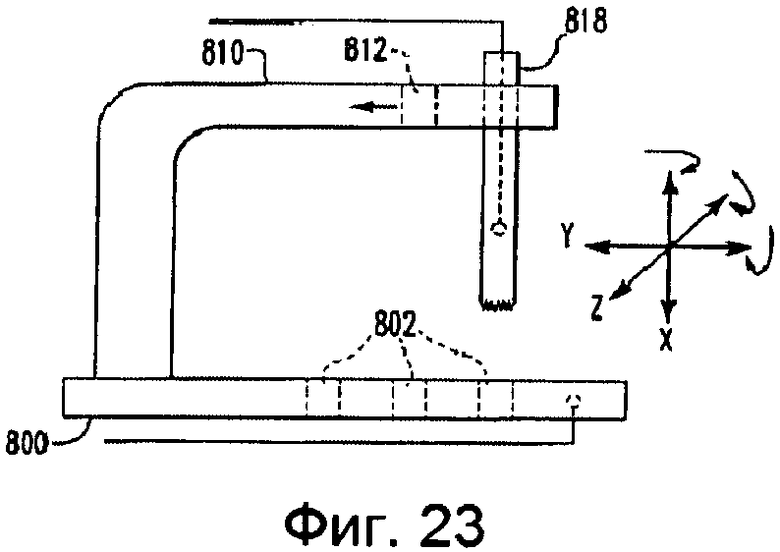
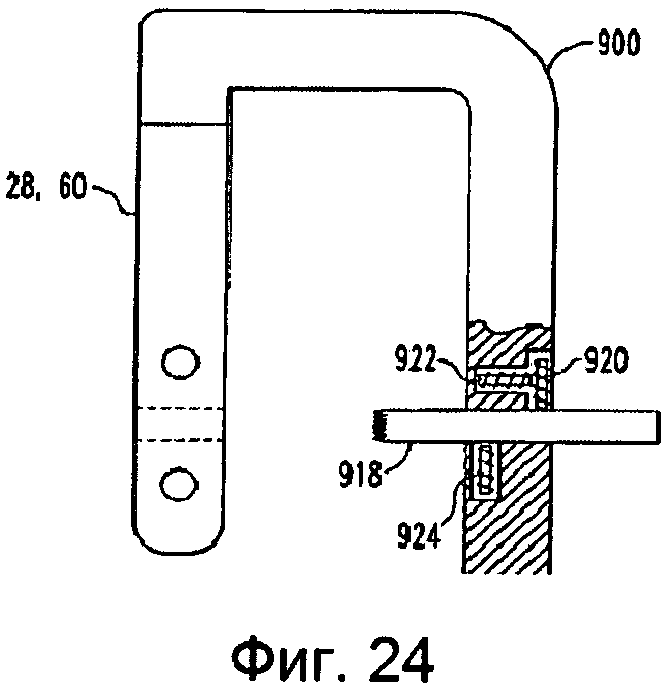
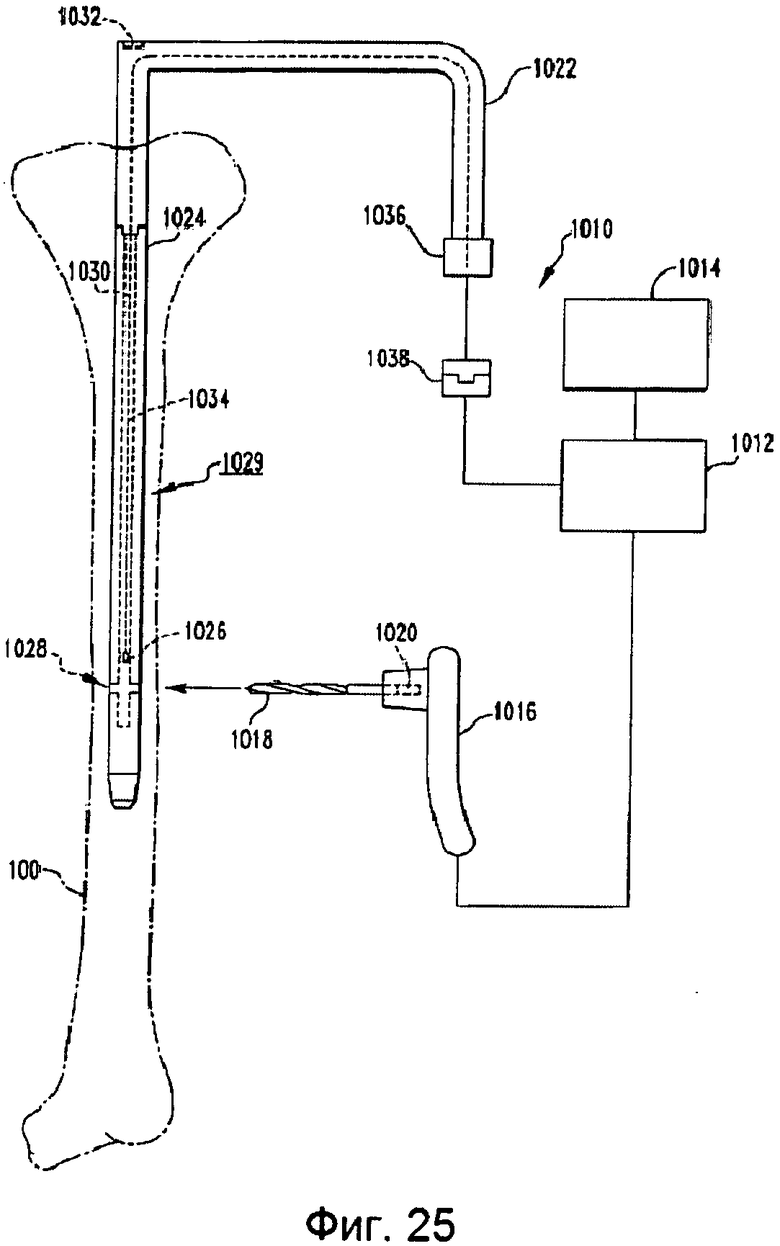
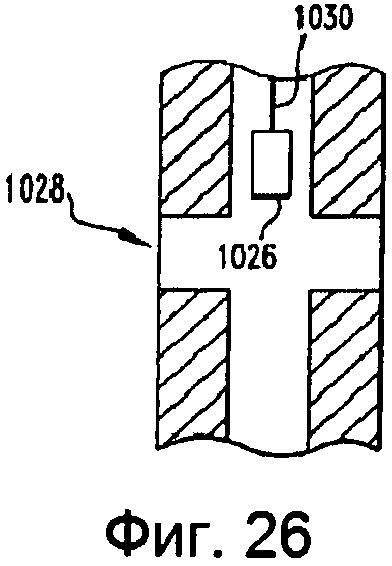

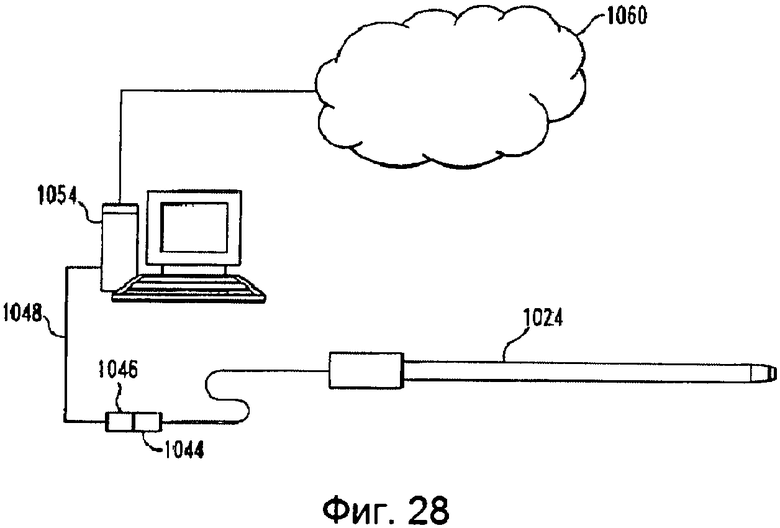

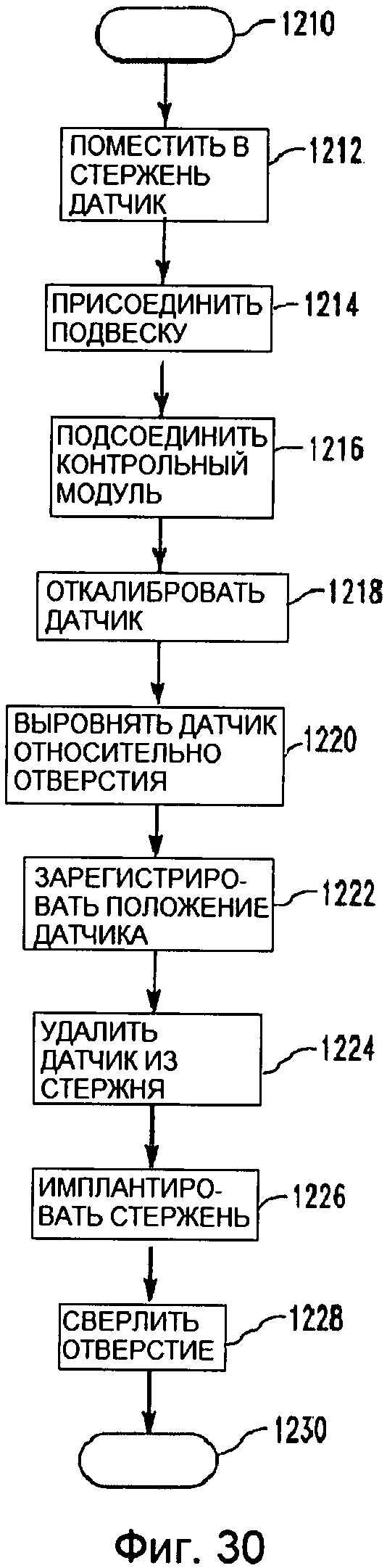
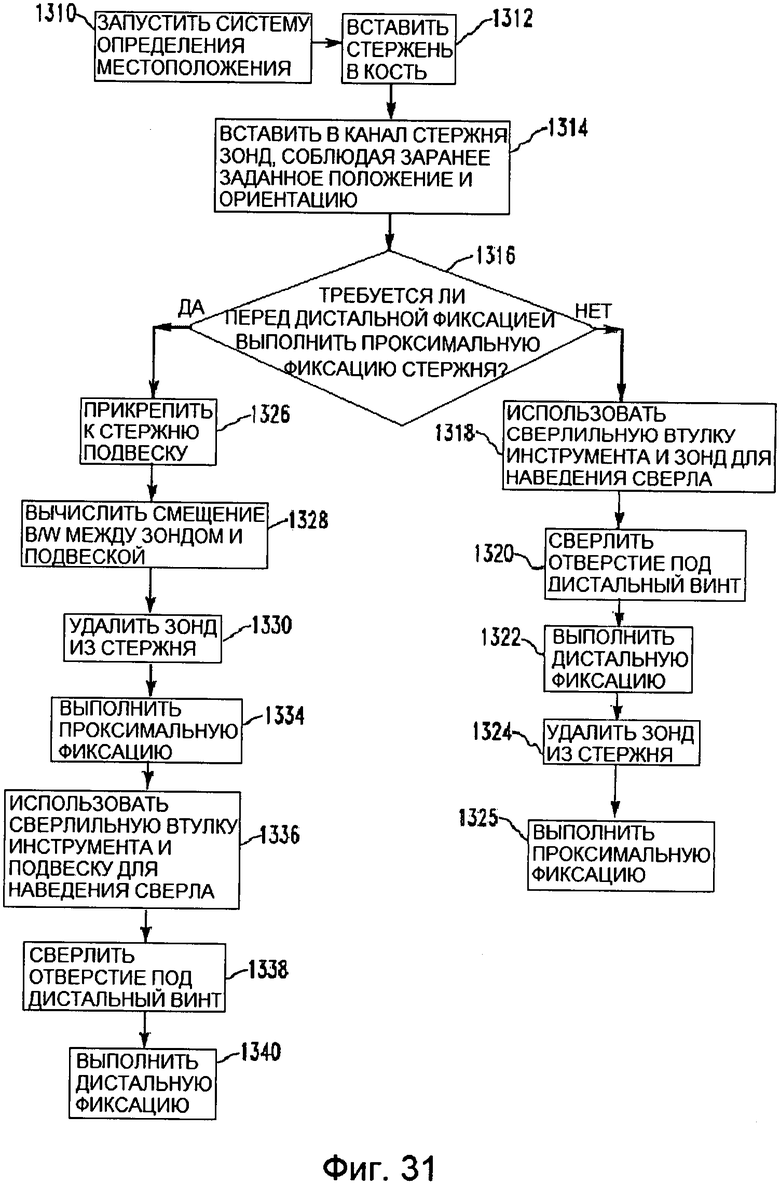
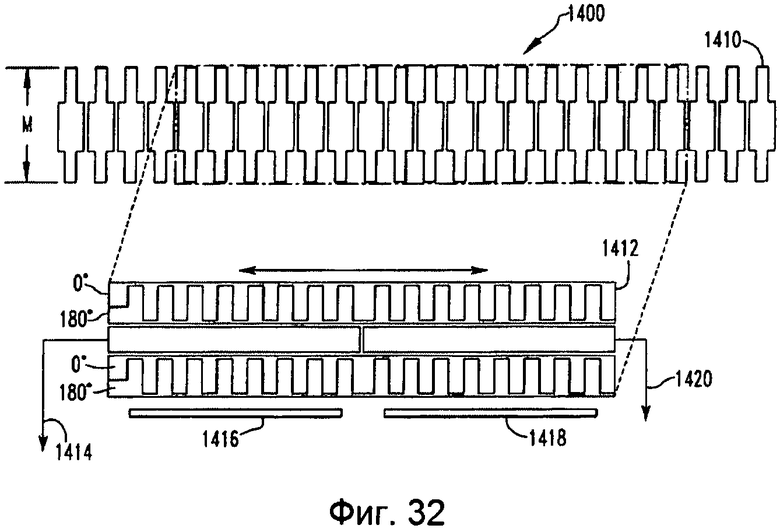
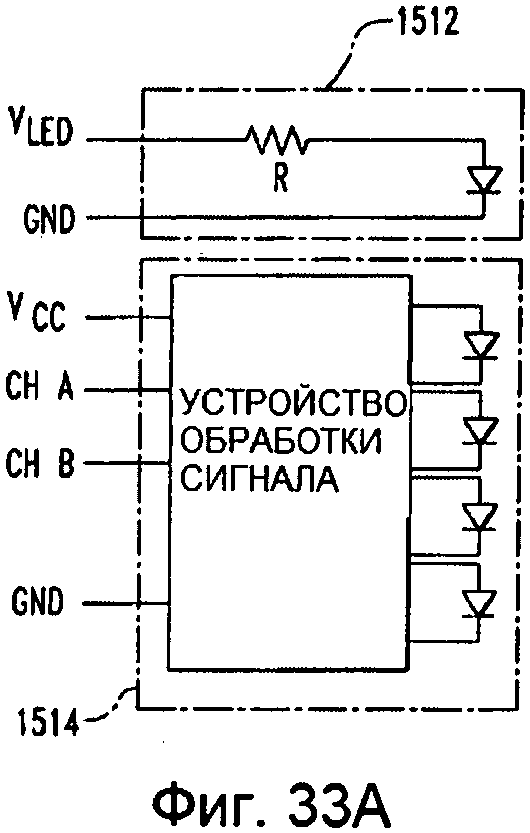
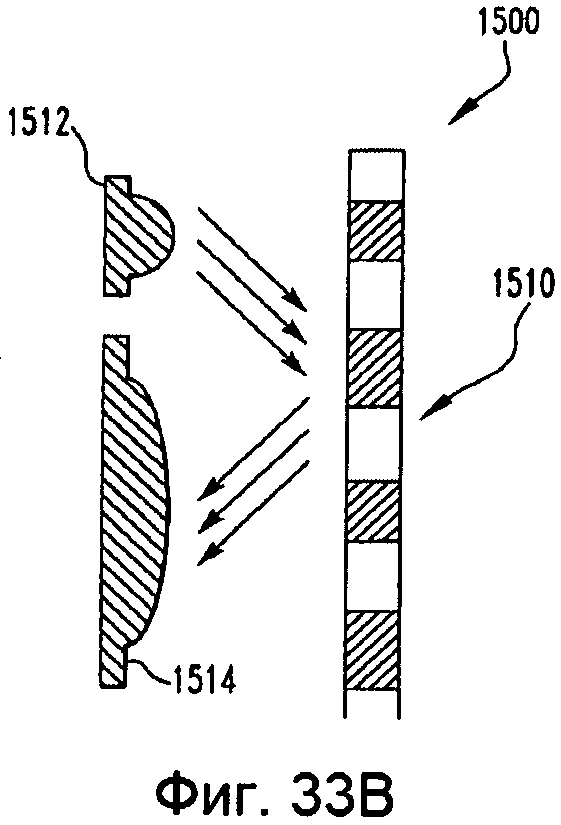
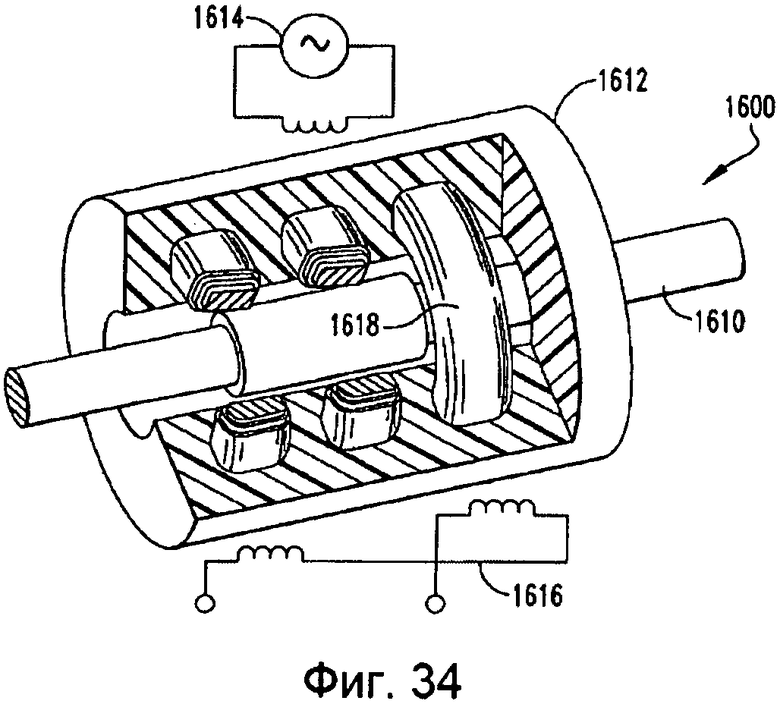
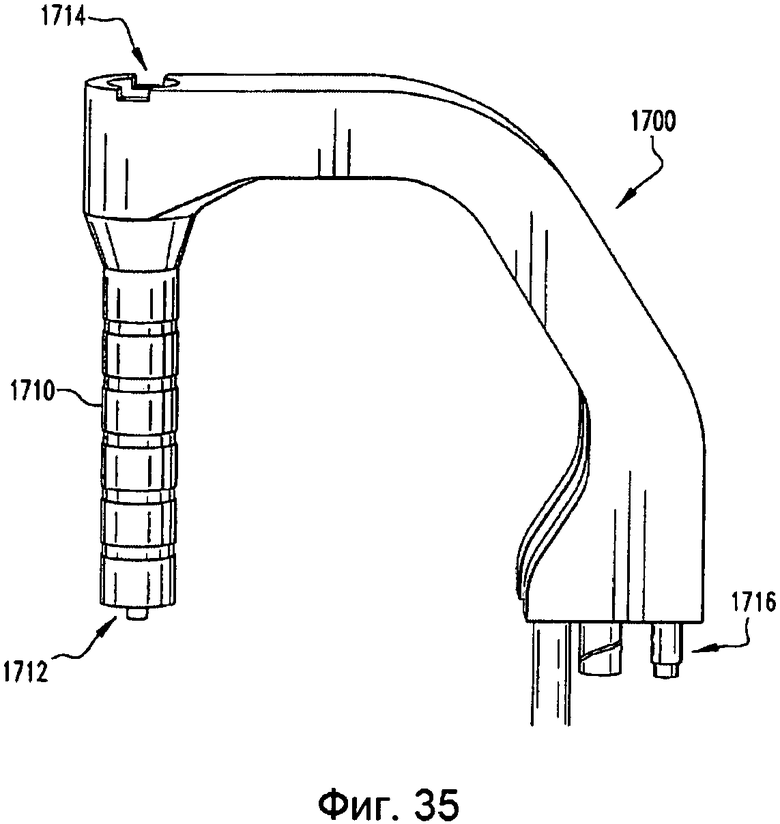
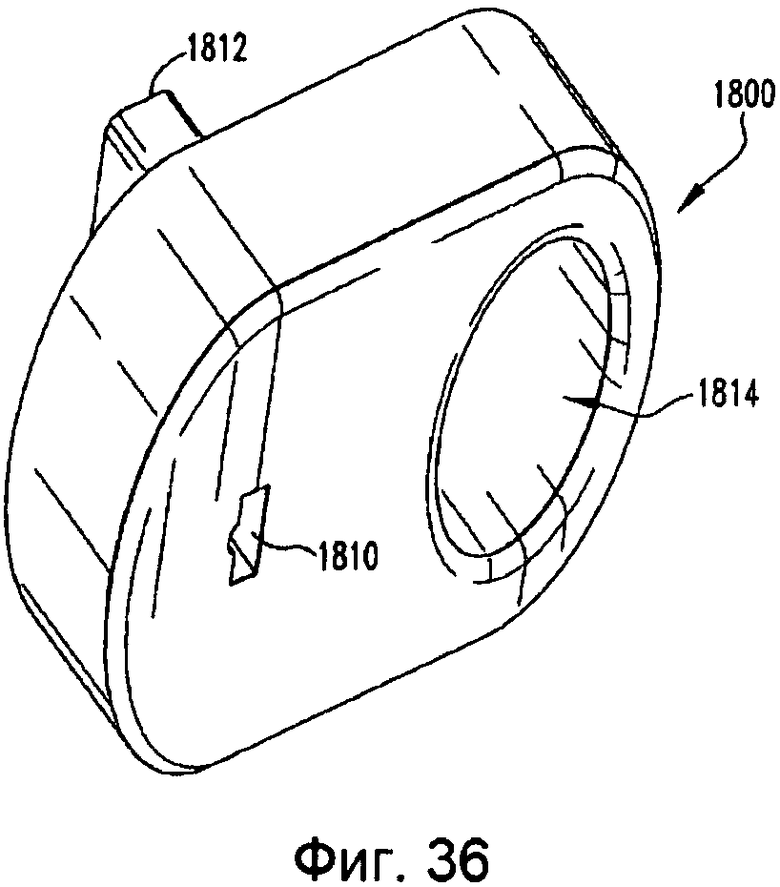
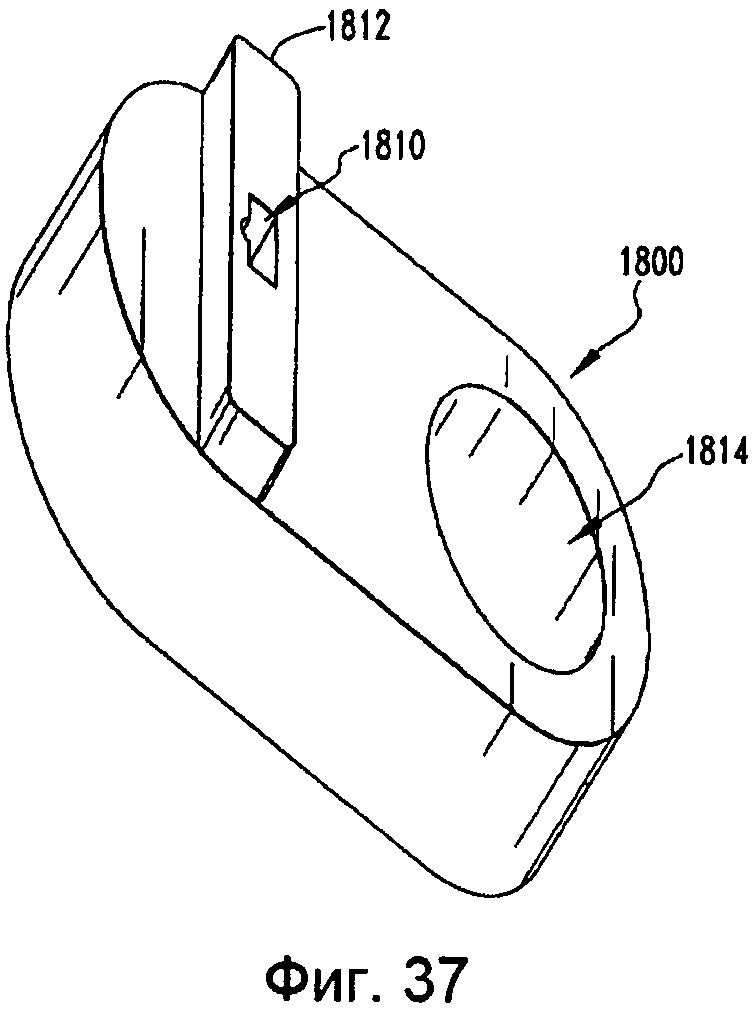
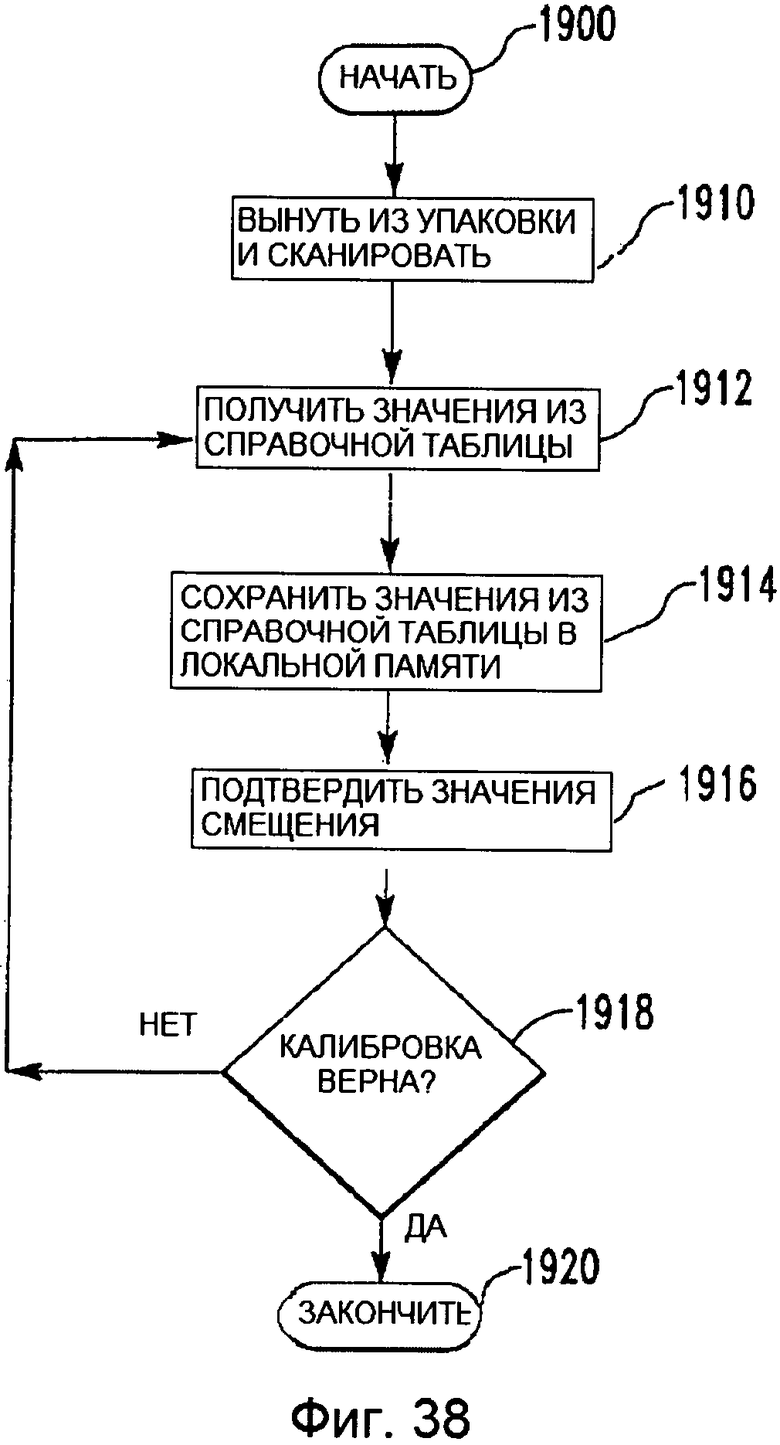

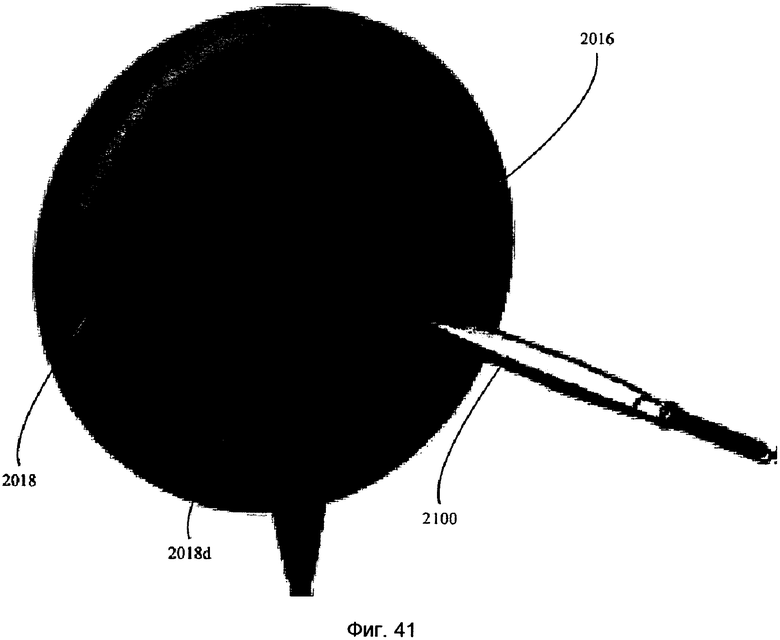
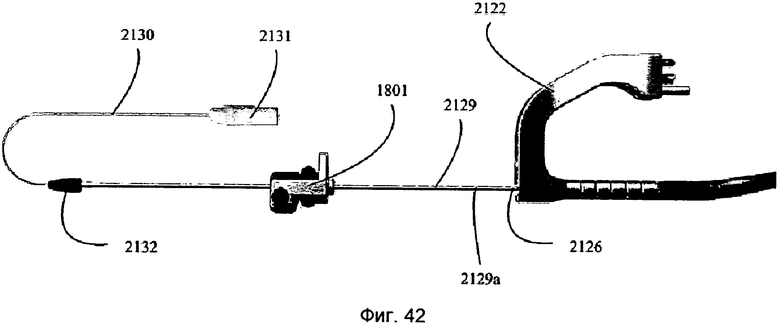

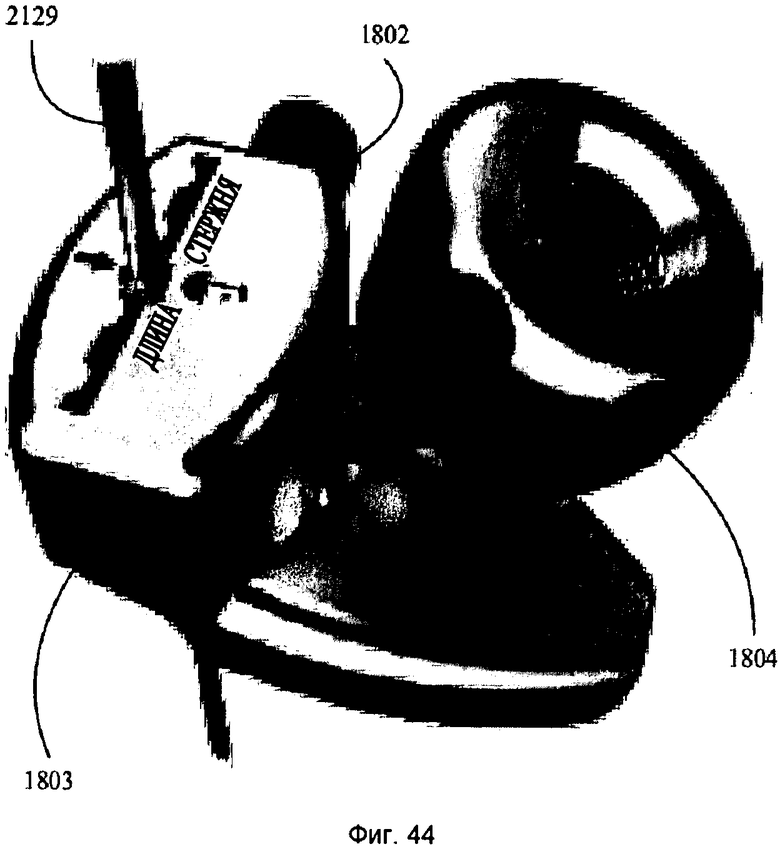
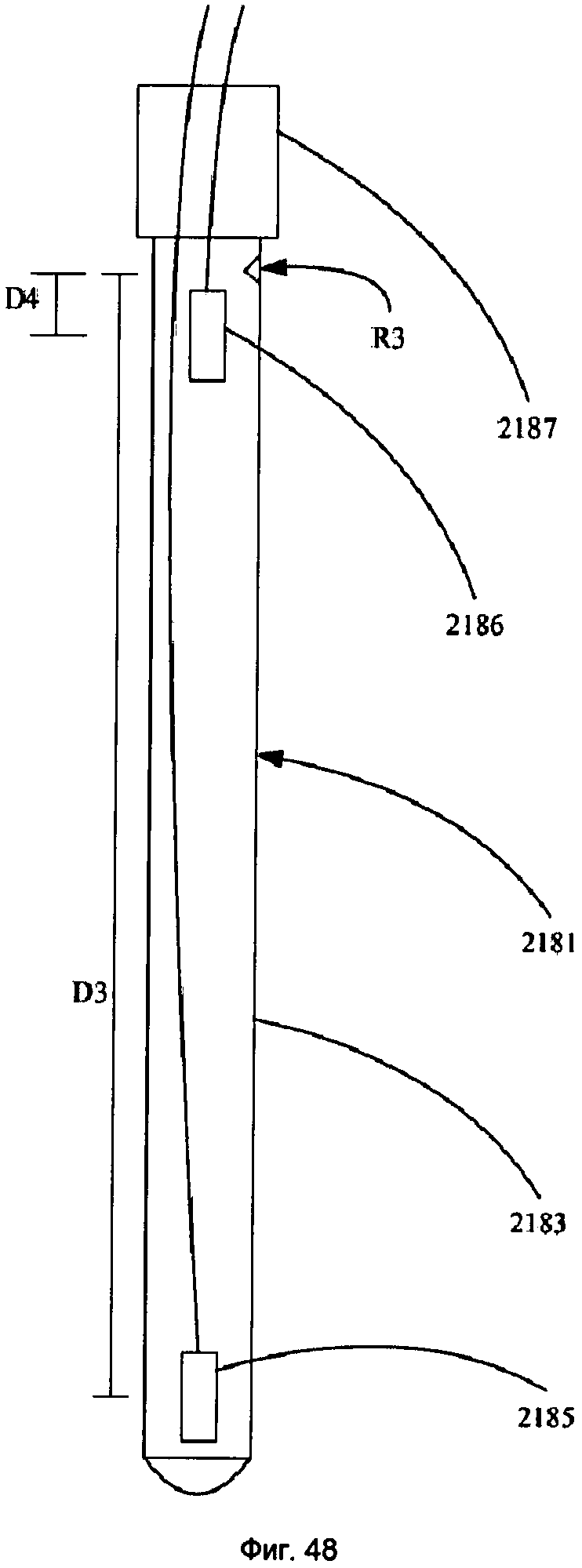
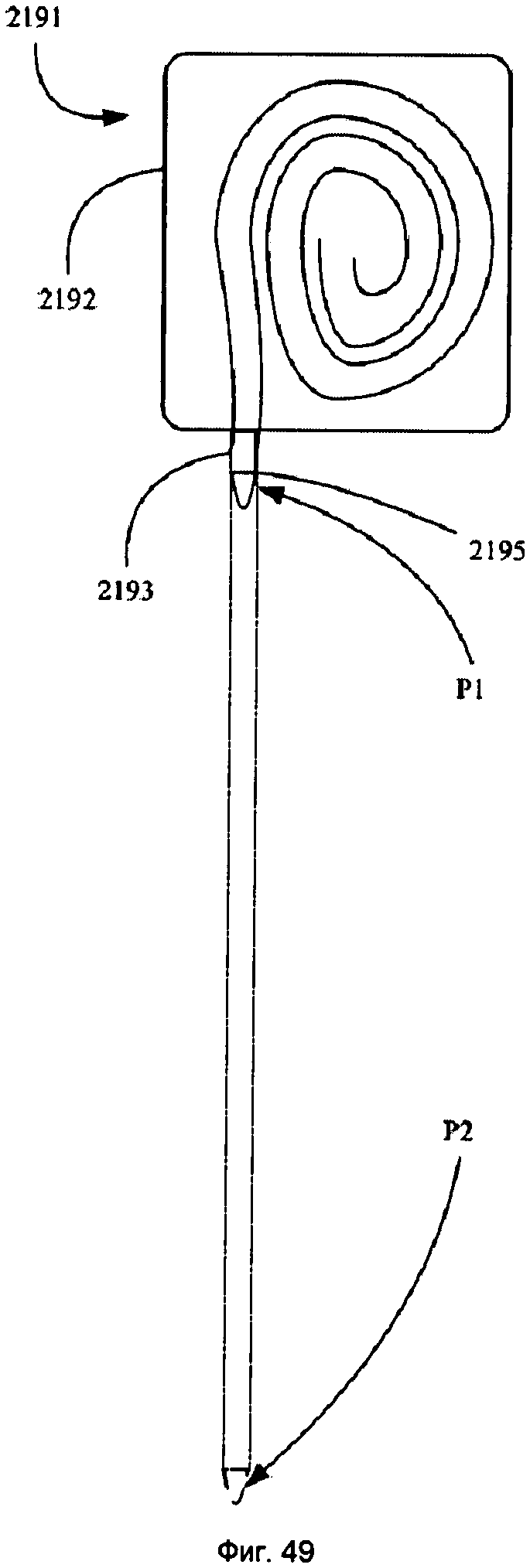
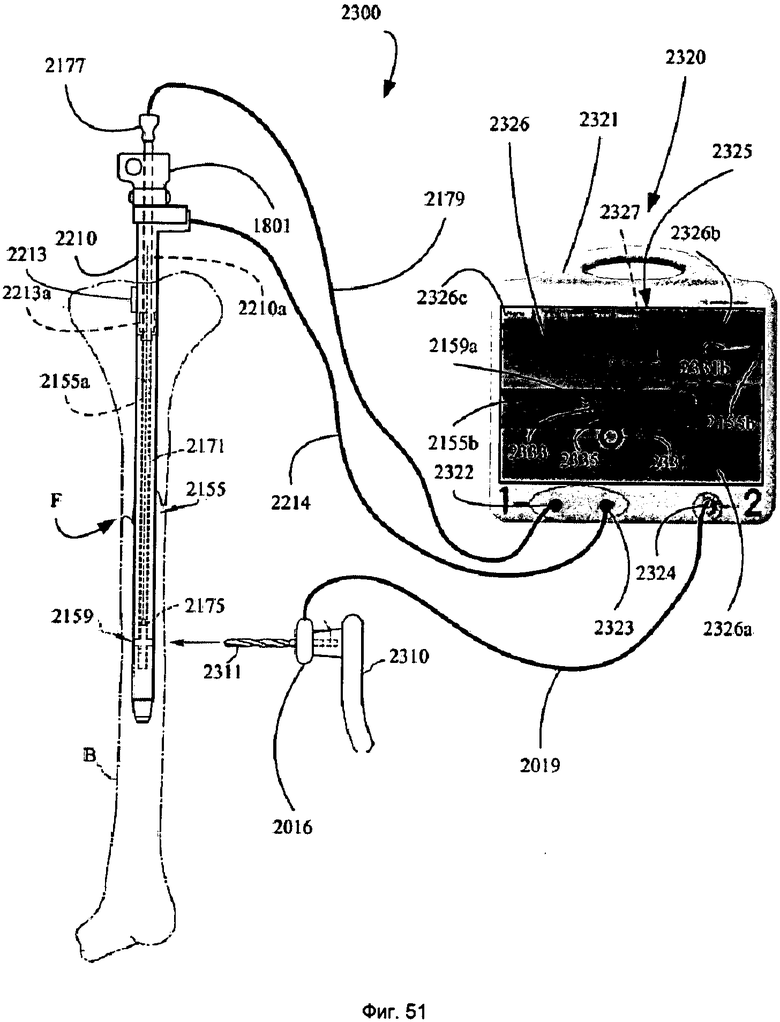
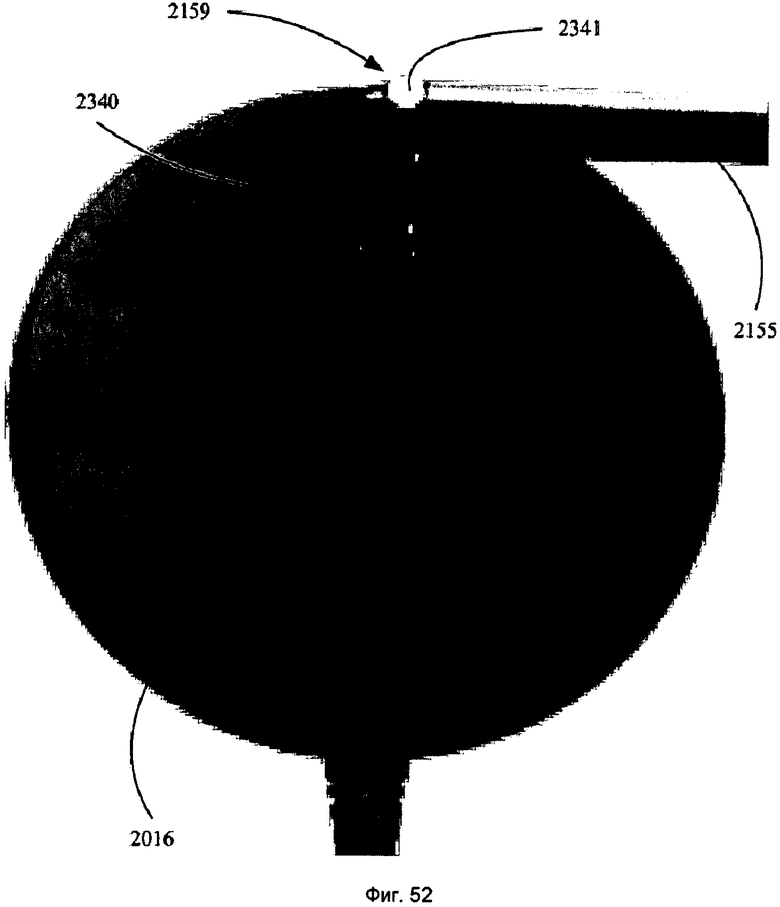
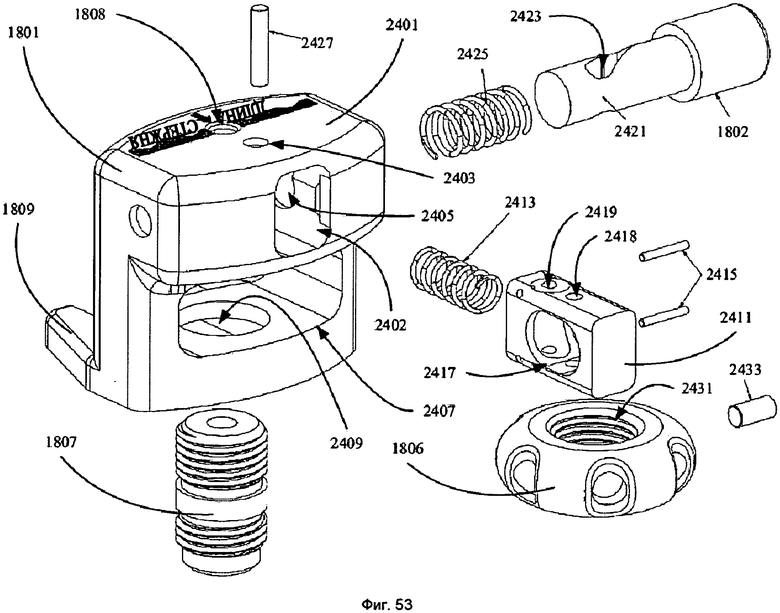
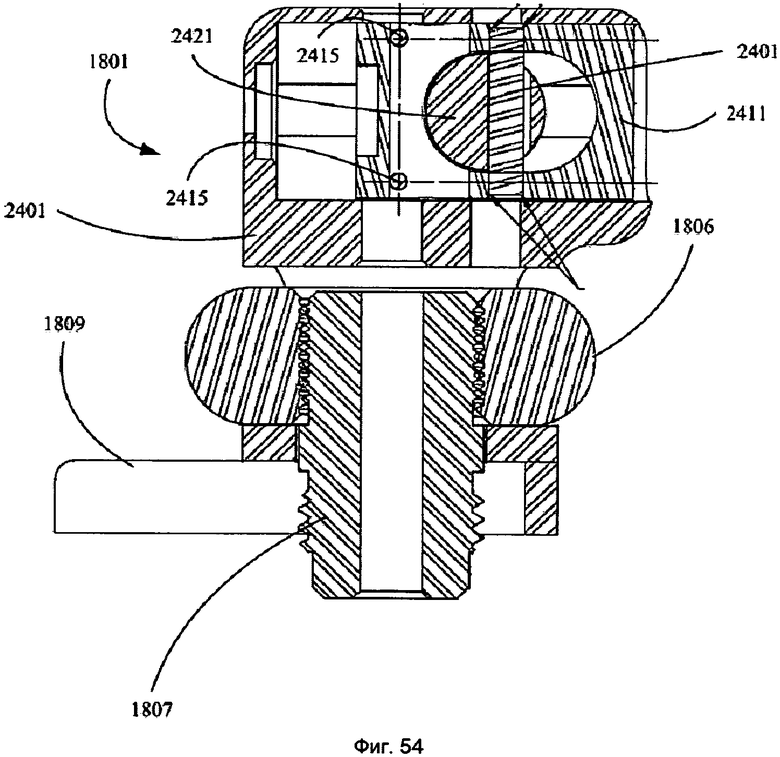
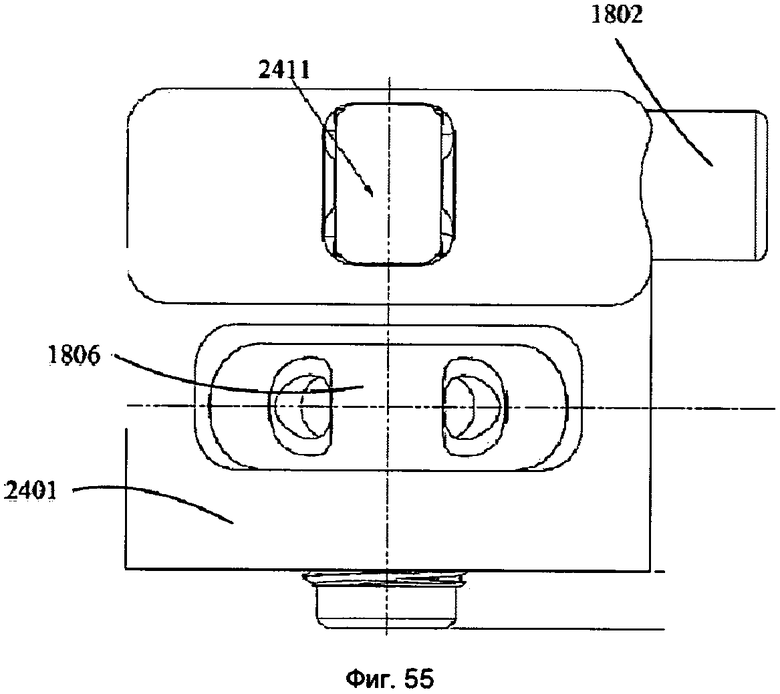
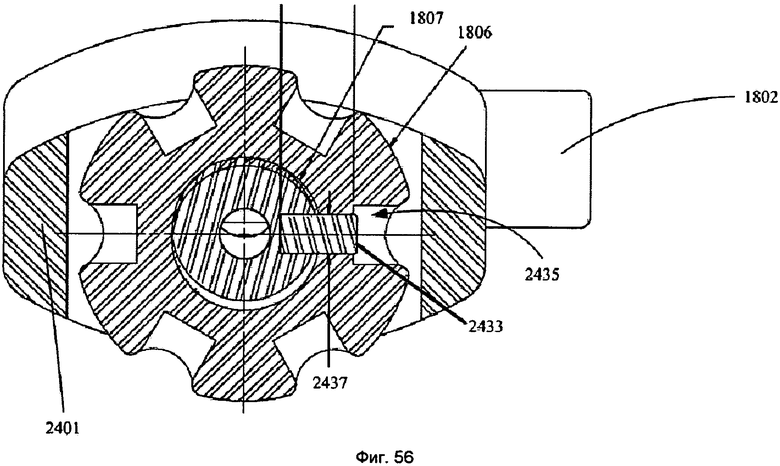
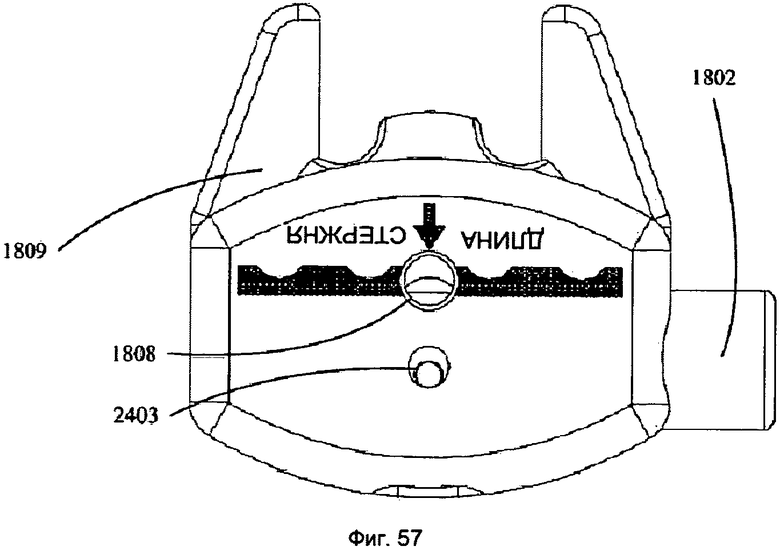
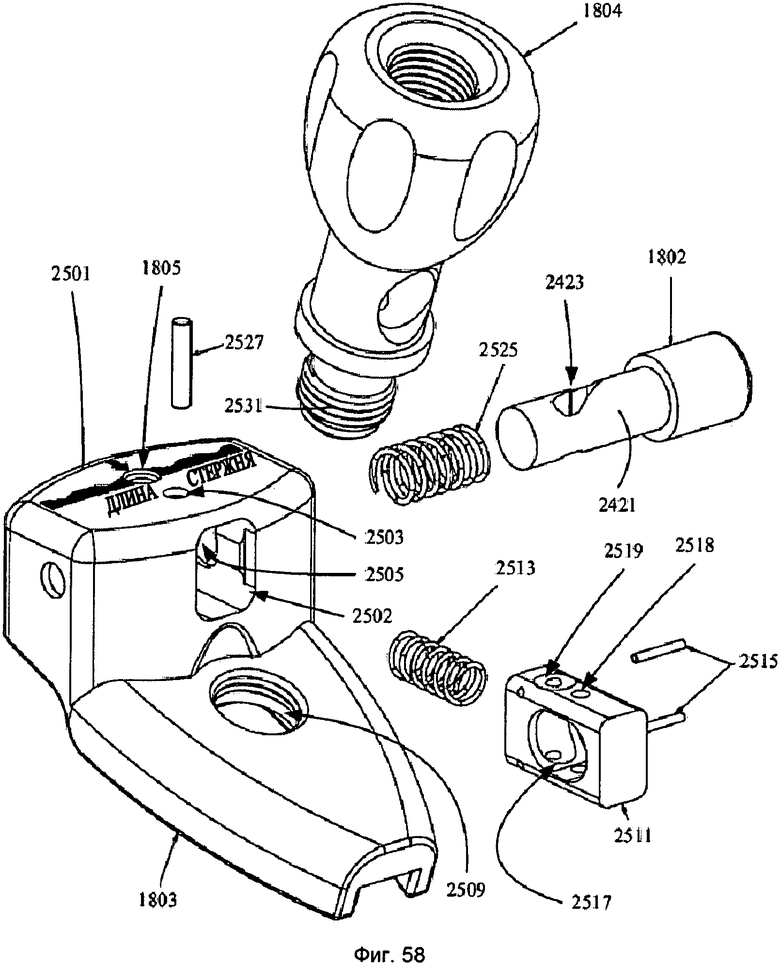
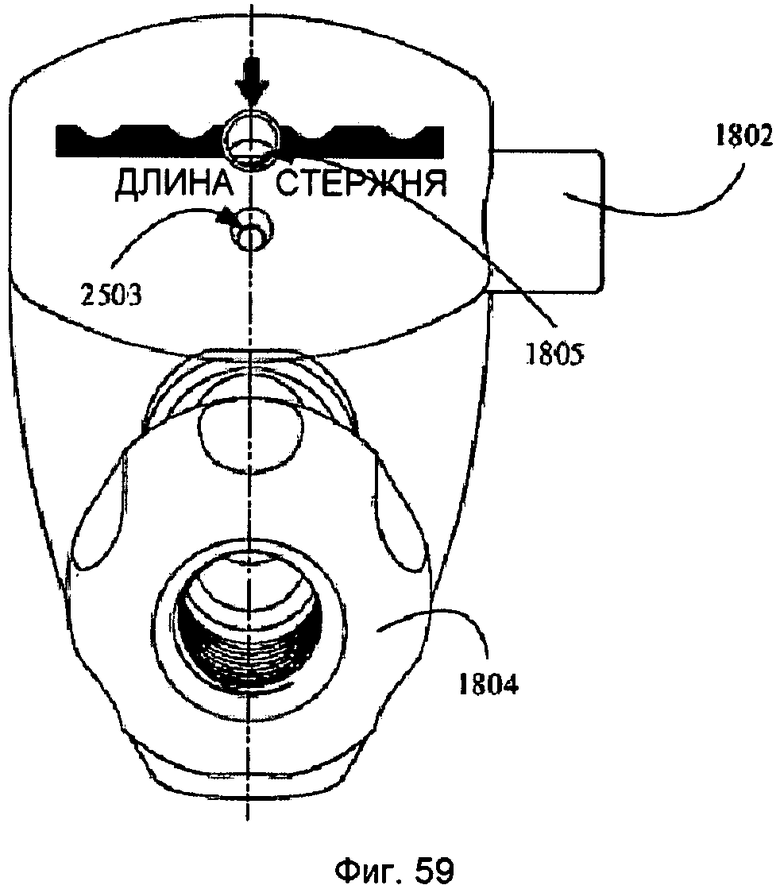
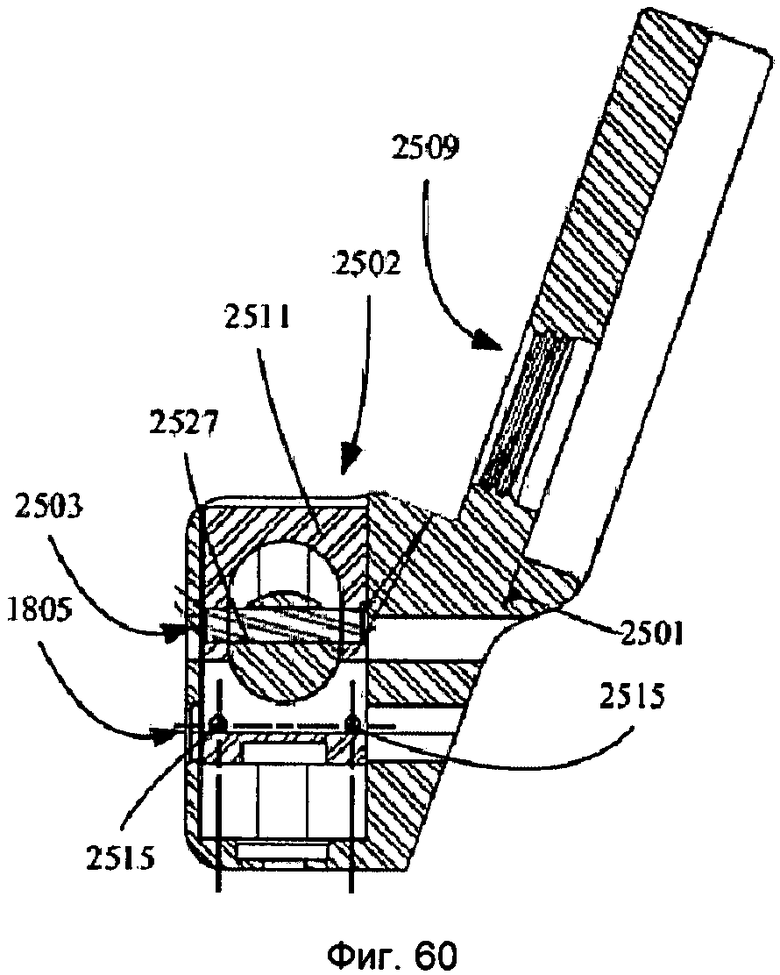
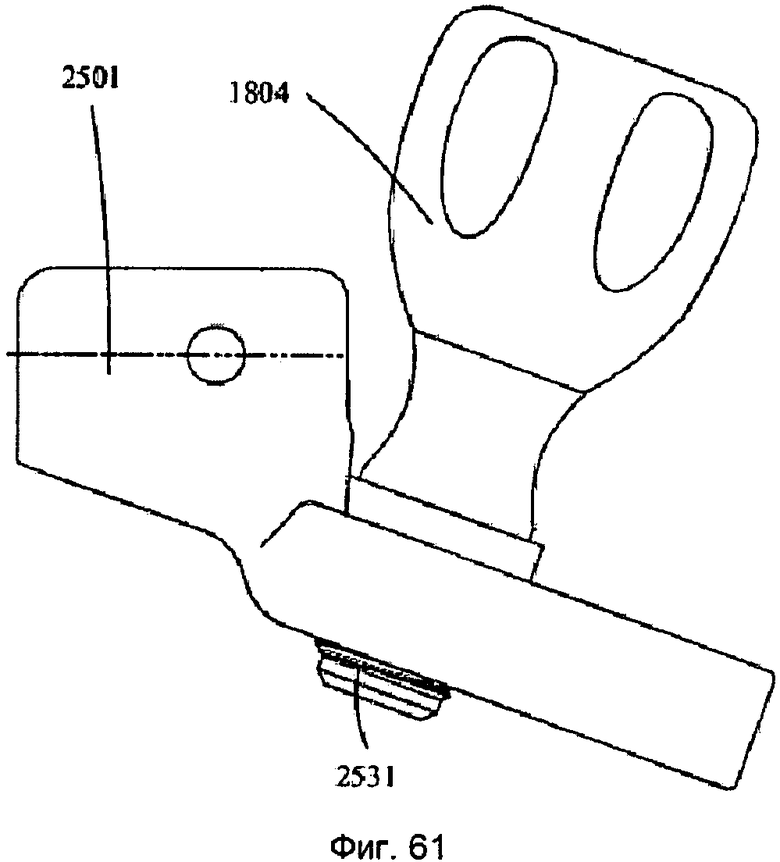
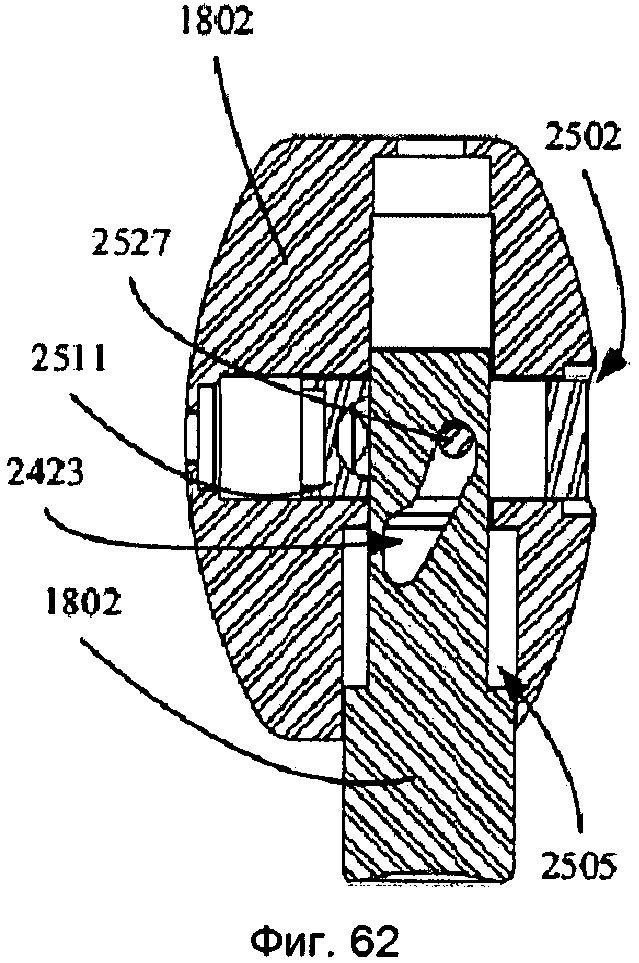
Группа изобретений относится к медицине. Генератор поля для использования в хирургической системе наведения, содержащий монтажную деталь и по меньшей мере одно покрытие, выполненное поверх монтажной детали. Монтажная деталь содержит элементы, выполненные с возможностью вмещения компонентов генератора электромагнитного поля. Указанные элементы размещены на монтажной детали с соблюдением взаимных положений и ориентации. При использовании генератора взаимные положения и ориентации указанных элементов остаются по существу неизменными после подвергания по меньшей мере одному процессу стерилизации. Способ, в котором подвергают процессу стерилизации идентификатор ориентира, содержащий монтажную деталь, снабженную множеством элементов, выполненных с возможностью вмещения индукционных катушек генератора электромагнитного поля и размещенных на указанной монтажной детали с соблюдением взаимных положений и ориентации. Подвергание идентификатора ориентира процессу стерилизации по существу не приводит к изменению взаимных положений и ориентации указанного множества элементов. Способ создания идентификатора ориентира, в котором изготавливают элементы, соблюдая их положение в монтажной детали, содержащей первый размерно-устойчивый автоклавируемый материал; закрепляют электромагнитные индукционные катушки, соблюдая их ориентацию в указанных элементах; изготавливают в монтажной детали сквозное отверстие; прикрепляют к монтажной детали соединительный элемент, снабженный сквозным отверстием, выровненным со сквозным отверстием монтажной детали при прикреплении соединительного элемента к монтажной детали, при этом соединительный элемент содержит второй размерно-устойчивый автоклавируемый материал; покрывают монтажную деталь и электромагнитные индукционные катушки третьим автоклавируемым материалом. При необходимости наносят четвертый автоклавируемый материал поверх наружной поверхности третьего автоклавируемого материала. Изобретения обеспечивают повышение точности и надежности наведения на ориентиры медицинских имплантатов. 3 н. и 12 з.п. ф-лы, 62 ил.
1. Генератор поля для использования в хирургической системе наведения, содержащий:
монтажную деталь, содержащую элементы, выполненные с возможностью вмещения компонентов генератора электромагнитного поля, причем указанные элементы размещены на монтажной детали с соблюдением взаимных положений и ориентаций;
по меньшей мере одно покрытие, выполненное поверх монтажной детали;
причем при использовании генератора взаимные положения и ориентации указанных элементов остаются по существу неизменными после подвергания по меньшей мере одному процессу стерилизации.
2. Генератор по п.1, в котором монтажная деталь дополнительно снабжена по меньшей мере одним отверстием, а также одним из следующих элементов: полая вставка и пеноматериал, размещенным в указанном по меньшей мере одном отверстии.
3. Генератор по п.1, дополнительно содержащий по меньшей мере один из следующих элементов: втулка и насадка втулки, продольная ось которого выровнена с центром тяжести.
4. Генератор по п.1, в котором монтажная деталь выполнена из размерно-устойчивого автоклавируемого материала.
5. Генератор по п.4, в котором монтажная деталь содержит эпоксидный слоистый пластик с армированием.
6. Генератор по п.1, дополнительно содержащий электромагнитные индукционные катушки, установленные в указанных элементах с соблюдением взаимных положений и ориентаций.
7. Генератор по п.1, в котором указанное по меньшей мере одно покрытие содержит первое покрытие, выполненное из автоклавируемого материала и размещенное поверх каждого из указанных элементов.
8. Генератор по п.7, в котором первое покрытие содержит силиконовый материал.
9. Генератор по п.1, дополнительно содержащий соединительный элемент, соединенный с монтажной деталью и выполненный с возможностью вмещения одного из следующих элементов: отсоединяемая втулка и отсоединяемая насадка втулки, причем указанный соединительный элемент содержит размерно-устойчивый автоклавируемый материал, причем по меньшей мере один из следующих элементов: отсоединяемая втулка и отсоединяемая насадка втулки содержит размерно-устойчивый автоклавируемый материал.
10. Генератор по п.9, в котором втулка и насадка втулки содержат участок в форме усеченного конуса.
11. Способ, в котором:
подвергают процессу стерилизации идентификатор ориентира, содержащий монтажную деталь, снабженную множеством элементов, выполненных с возможностью вмещения индукционных катушек генератора электромагнитного поля и размещенных на указанной монтажной детали с соблюдением взаимных положений и ориентаций, причем подвергание идентификатора ориентира процессу стерилизации по существу не приводит к изменению взаимных положений и ориентаций указанного множества элементов.
12. Способ по п.11, в котором дополнительно используют идентификатор ориентира для наведения на ориентир ортопедического имплантата.
13. Способ по п.12, в котором при выполнении наведения размещают генератор поля в пределах зоны действия датчика и используют дисплей системы наведения для размещения идентификатора ориентира в заранее заданное положение относительно ориентира.
14. Способ создания идентификатора ориентира, в котором:
изготавливают элементы, соблюдая их положение в монтажной детали, содержащей первый размерно-устойчивый автоклавируемый материал;
закрепляют электромагнитные индукционные катушки, соблюдая их ориентации в указанных элементах;
изготавливают в монтажной детали сквозное отверстие;
прикрепляют к монтажной детали соединительный элемент, снабженный сквозным отверстием, выровненным со сквозным отверстием монтажной детали при прикреплении соединительного элемента к монтажной детали, при этом соединительный элемент содержит второй размерно-устойчивый автоклавируемый материал;
покрывают монтажную деталь и электромагнитные индукционные катушки третьим автоклавируемым материалом;
при необходимости наносят четвертый автоклавируемый материал поверх наружной поверхности третьего автоклавируемого материала.
15. Способ по п.14, в котором дополнительно:
присоединяют, с возможностью отсоединения, к соединительному элементу по меньшей мере один из следующих элементов: втулка и насадка втулки;
изготавливают в монтажной детали по меньшей мере одну выемку и размещают в указанной по меньшей мере одной выемке по меньшей мере один из следующих элементов: полый материал и пеноматериал;
или
изготавливают на наружной поверхности идентификатора ориентира поверхность захвата, содержащую по меньшей мере один из следующих элементов: поверхностное рифление и углубление поверхности.
| US2007162018A1, 12.07.2007 | |||
| УСТРОЙСТВО Н.В.ВЫГОВСКОГО ДЛЯ ОСТЕОСИНТЕЗА БЕДРЕННОЙ КОСТИ | 1995 |
|
RU2118134C1 |
| СТЕРЕОТАКСИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И ВЫПОЛНЕНИЯ КОСТНЫХ КАНАЛОВ ПРИ ПЛАСТИКЕ КРЕСТООБРАЗНЫХ СВЯЗОК КОЛЕННОГО СУСТАВА | 1994 |
|
RU2083179C1 |
| US2004034355 A1, 19.02.2004 | |||
| СТЕРЕОТАКСИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И ВЫПОЛНЕНИЯ КОСТНЫХ КАНАЛОВ ПРИ ПЛАСТИКЕ КРЕСТООБРАЗНЫХ СВЯЗОК КОЛЕННОГО СУСТАВА | 1994 |
|
RU2083179C1 |
| US2005080427 A1, 14.04.2005 | |||
| US2008154266 A1, 26.06.2008. | |||

