[0001] Данная заявка испрашивает приоритет китайской патентной заявки №202110128125.2, поданной 29 января 2021 г., содержание которой включено в данный документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится к сельскому хозяйству и, в частности, к способу определения площади, обработанной сельскохозяйственной машиной, и системе, в которой применяется этот способ.
Предпосылки изобретения
[0003] Важным является точное вычисление значений площади земли, которую можно возделать с помощью сельскохозяйственных машин. С площадями, которые можно обрабатывать с помощью сельскохозяйственных машин, тесно связаны государственные дотации, распределение затрат операторов сельскохозяйственных машин и национальные статистические данные о сельском хозяйстве. В предшествующем уровне техники для вычисления площади, обработанной сельскохозяйственной машиной, в основном приняты ручной способ измерения и автоматический способ измерения с использованием датчиков, однако оба эти способа характеризуются многочисленными проблемами при фактической работе.
[0004] В частности, ручной способ измерения включает способ измерения рулеткой и ручное измерение по точкам. Способ измерения рулеткой подразумевает использование операторами рулетки для измерения всех обрабатываемых площадей с целью получения длины и ширины рабочей площади, а также получения величины рабочей площади. Способ измерения рулеткой не только расходует рабочую силу, но и подходит только для небольших рабочих площадей правильной формы. При измерении площадей неправильной формы вычисления являются громоздкими, и имеют место большие погрешности. Способ измерения вручную по точкам относится к применению оператором счетчика площади для вычисления рабочей площади с использованием данных GPS. Этот способ подходит для измерения рабочей площади различных форм и площадей большего размера. Однако способ измерения вручную по точкам требует ручного управления, что увеличивает объем работы оператора, а скорость измерения является низкой.
[0005] Дополнительно, автоматический способ измерения включает способ измерения счетчиком пробега и способ измерения с использованием определения местоположения по координатам. Способ измерения счетчиком пробега относится к установке счетчика пробега на сельскохозяйственную машину, использованию счетчика пробега для получения расстояния, пройденного сельскохозяйственной машиной, и умножению этого расстояния на рабочую ширину сельскохозяйственной машины для измерения площади, обработанной сельскохозяйственной машиной. Способ измерения счетчиком пробега не требует ручной работы и характеризуется высокой скоростью вычисления, однако точность измерения является низкой. По причине наличия повторных действий и непрямых линий при перемещениях сельскохозяйственной машины будут иметь место большие погрешности самого счетчика пробега. Поэтому между обработанной площадью, вычисленной с использованием измерителя расстояния для получения расстояния, пройденного сельскохозяйственной машиной, и фактической площадью, обработанной сельскохозяйственной машиной, существует большая разница. Способ измерения с использованием определения местоположения по координатам относится к установке на сельскохозяйственную машину системы определения местоположения по координатам, такой как GPS или Beidou, для получения расстояния, пройденного сельскохозяйственной машиной, и его умножения на рабочую ширину сельскохозяйственной машины для измерения площади, обработанной сельскохозяйственной машиной. Однако способ измерения с использованием определения местоположения по координатам характеризуется такими же проблемами, как способ измерения с использованием счетчика пробега, так как этот способ не способен различать расстояния, пройденные в рабочем состоянии, при повторяющихся проходах в рабочем состоянии и в нерабочем состоянии. Поэтому вычисленная обработанная площадь, которая измерена с помощью способа с использованием способа определения местоположения по координатам, будет больше фактической площади, обработанной сельскохозяйственной машиной.
Сущность изобретения
[0006] В настоящем изобретении предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом способ приспособлен для точного определения площади, обработанной сельскохозяйственной машиной, с помощью простого алгоритма, с небольшой погрешностью и широкой сферой применения.
[0007] В настоящем изобретении дополнительно предоставлено электронное устройство, при этом в электронном устройстве применен данный способ для проведения различий между состояниями сельскохозяйственной машины в нормальном рабочем состоянии, повторяющемся рабочем состоянии и нерабочем состоянии, определения только данных сельскохозяйственной машины, действующей в рабочем состоянии, и сведения к минимуму разности между обработанной площадью, определенной с помощью данного способа, и фактически обработанной площадью.
[0008] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе состояния сельскохозяйственной машины различают автоматически в соответствии с данными координат сельскохозяйственной машины и соответствующими данными моментов времени, например данные координат сельскохозяйственной машины включают, но без ограничения, координаты по долготе и координаты по широте.
[0009] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе данные координат сельскохозяйственной машины обрабатывают и очищают. Когда данные координат сельскохозяйственной машины появляются повторно в разные моменты времени, сохраняются только данные координат, соответствующие первому моменту времени. Поэтому площадь, обработанная сельскохозяйственной машиной, которая действует с повторениями, исключается, что дополнительно способствует уменьшению разности между обработанной площадью, определенной с помощью данного способа, и фактически обработанной площадью.
[0010] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе удаляют данные координат, находящиеся за пределами диапазона данных координат сельскохозяйственной машины, которая находится вне рабочей площади, данные координат сельскохозяйственной машины обрабатывают и очищают, при этом исключается использование аномальных данных для определения площади, обработанной сельскохозяйственной машиной, и с помощью данного способа повышается точность определения обработанной площади.
[0011] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе после очистки выполняют кластеризацию и сегментирование данных координат и данных моментов времени сельскохозяйственной машины. Для дополнительного повышения точности определения данные с низкой плотностью и неправильными моментами времени в сегментированных данных сегментируются в данные, относящиеся к нерабочему состоянию, и эти данные, относящиеся к нерабочему состоянию, удаляются с целью обеспечения достоверности рабочих данных сельскохозяйственной машины, которые используются для определения обработанной площади.
[0012] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе на основе рабочих данных после кластеризации и сегментирования генерируют полигоны множества рабочих площадей, и площадь, обработанную сельскохозяйственной машиной, определяют на основе площадей данных полигонов.
[0013] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе выполняют агрегирование всех полигонов, удаление повторяющихся полигонов и получение множества полигонов, очищенных и извлеченных без повторения, для предотвращения более чем однократного определения одной площади одного и того же рабочего блока сельскохозяйственной машины.
[0014] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе с помощью проекционного преобразования выполняют преобразование данных долготы и данных широты сельскохозяйственной машины в двумерные координаты, и на основе этих двумерных координат определяют окончательную рабочую площадь сельскохозяйственной машины.
[0015] В настоящем изобретении дополнительно предоставлен способ определения площади, обработанной сельскохозяйственной машиной, и электронное устройство, в котором применяется этот способ, при этом в данном способе выполняют измерение разных типов сельхозугодий, и результаты измерения являются точными, что способствует распределению затрат операторов сельскохозяйственных машин, вычислению дотаций согласно национальной политике и национальных статистических данных о сельском хозяйстве.
[0016] С целью достижения по меньшей мере одной из вышеуказанных целей настоящего изобретения, в настоящем изобретении предоставлен способ определения площади, обработанной сельскохозяйственной машиной, при этом способ включает:
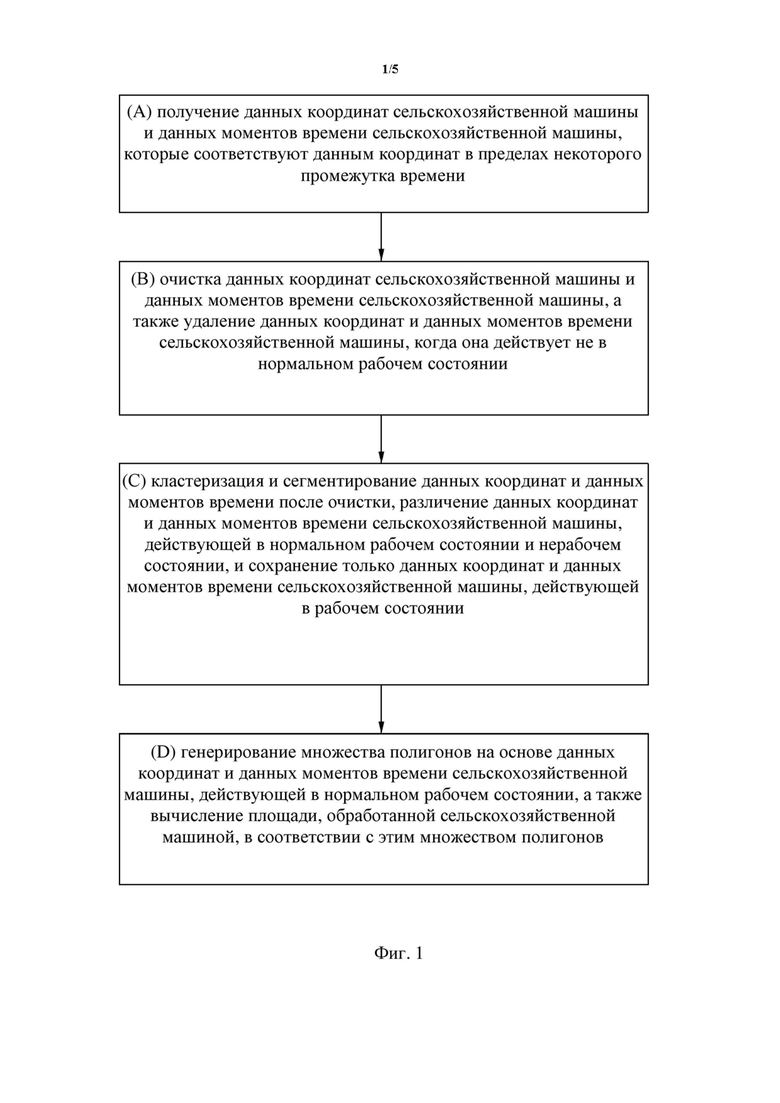
[0017] этап А - получение данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины, которые соответствуют данным координат в пределах некоторого промежутка времени;
[0018] этап В - очистку данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины, а также удаление данных координат и данных моментов времени сельскохозяйственной машины, когда она действует не в нормальном рабочем состоянии;
[0019] этап С - кластеризацию и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени сельскохозяйственной машины, действующей в нормальном рабочем состоянии и нерабочем состоянии, и сохранение только данных координат и данных моментов времени сельскохозяйственной машины, действующей в нормальном рабочем состоянии;
[0020] этап D - генерирование множества полигонов на основе данных координат и данных моментов времени сельскохозяйственной машины, действующей в нормальном рабочем состоянии, а также вычисление площади, обработанной сельскохозяйственной машиной, в соответствии с этим множеством полигонов.
[0021] этап Е - хранение площади, обработанной сельскохозяйственной машиной, для просмотра пользователями.
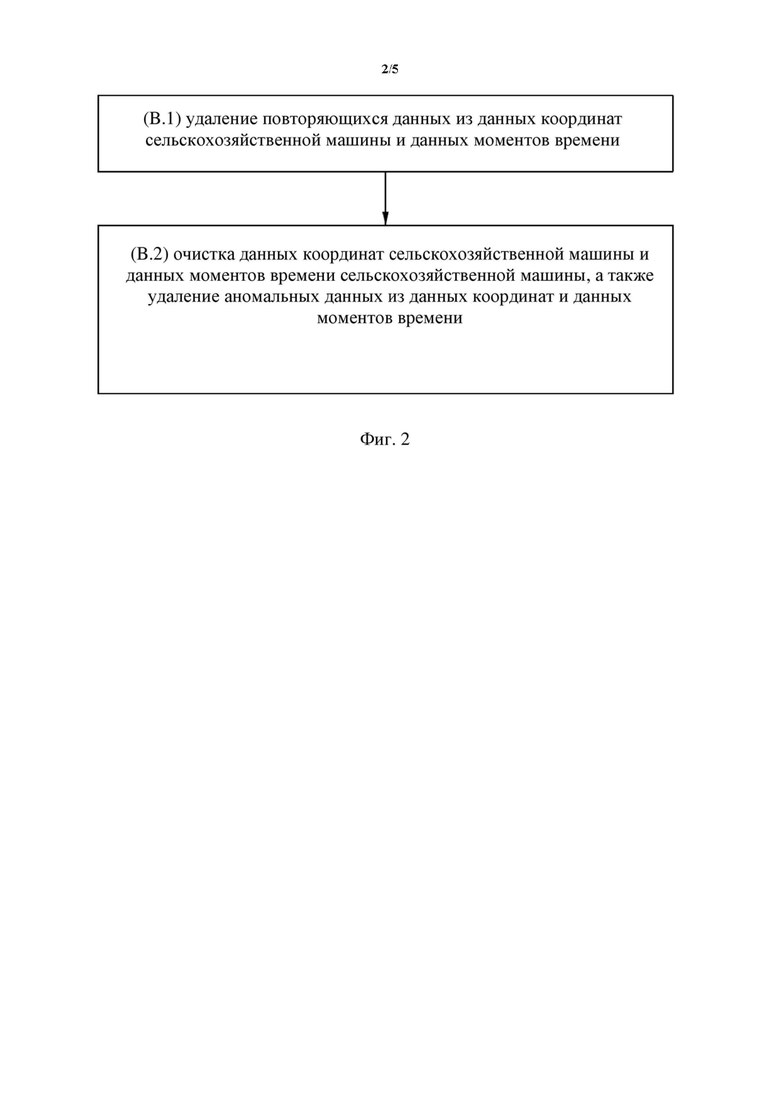
[0022] Согласно одному варианту осуществления настоящего изобретения, этап В дополнительно включает:
этап (В.1) - удаление повторяющихся данных из данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины;
[0023] этап (В.2) - очистку данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины, а также удаление аномальных данных из данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины.
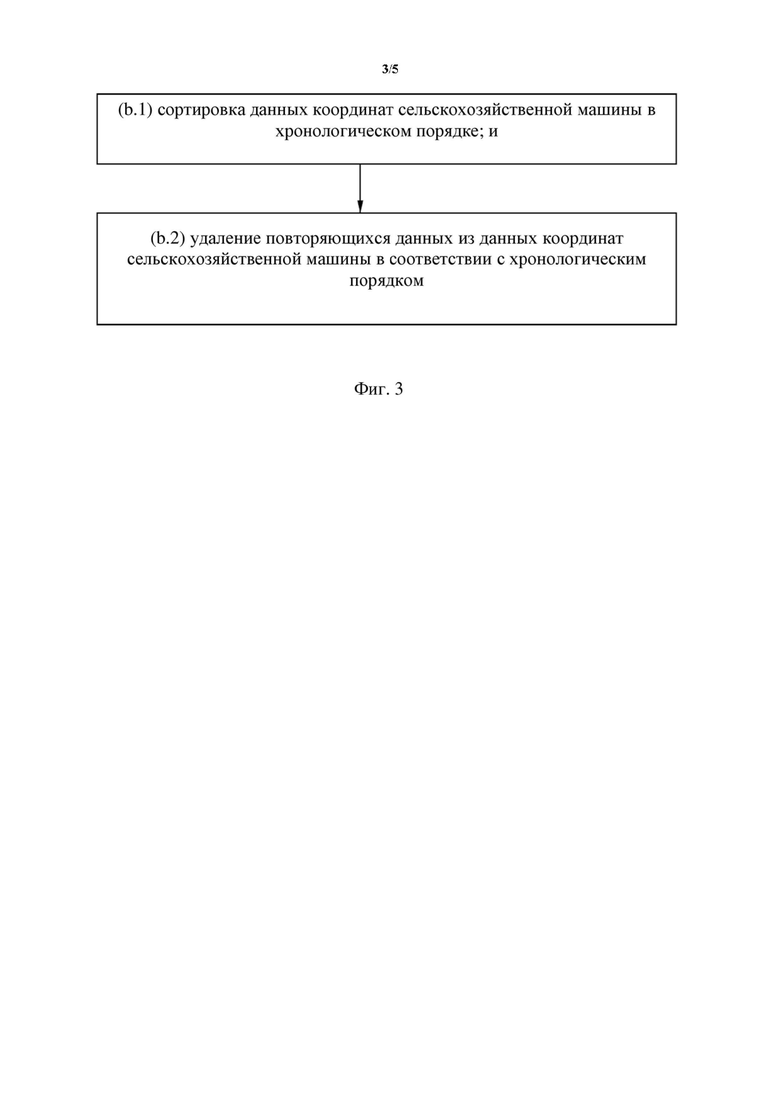
[0024] Согласно одному варианту осуществления настоящего изобретения, этап В.1 дополнительно включает:
[0025] этап (b.l) сортировку данных координат сельскохозяйственной машины в хронологическом порядке; и
[0026] этап (b.2) удаление повторяющихся данных из данных координат сельскохозяйственной машины в соответствии с хронологическим порядком.
[0027] Согласно одному варианту осуществления настоящего изобретения, этап В.2 дополнительно включает:
[0028] предварительную установку диапазона координат рабочей площади и удаление данных координат, находящихся за пределами этого диапазона координат рабочей площади, и данных моментов времени, соответствующих этим данным координат.
[0029] Согласно одному варианту осуществления настоящего изобретения, указанный диапазон координат включает диапазоны данных долготы и широты, при этом диапазон данных долготы составляет [-90, 90], и диапазон данных широты составляет [-180, 180].
[0030] Согласно одному варианту осуществления настоящего изобретения, этап В.2 дополнительно включает:
[0031] выполнение обнаружения аномалий в отношении данных координат сельскохозяйственной машины с помощью алгоритма «изолирующий лес» (Isolation Forest) и удаление данных координат, находящихся за пределами указанного диапазона координат.
[0032] Согласно одному варианту осуществления настоящего изобретения, этап С дополнительно включает:
[0033] применение алгоритма T-DBSCAN для кластеризации и сегментирования данных координат и данных моментов времени после очистки, и получение множества блоков кластерных данных.
[0034] Согласно одному варианту осуществления настоящего изобретения, этап С дополнительно включает:
[0035] коррекцию порогового значения времени, τ, радиуса плотности, r, и порогового значения плотности, ε, алгоритма T-DBSCAN.
[0036] Согласно одному варианту осуществления настоящего изобретения, этап С дополнительно включает:
[0037] проведение различий между данными сельскохозяйственной машины в нормальном рабочем состоянии и данных сельскохозяйственной машины в нерабочем состоянии в соответствии с плотностью данных и правильностью времени, при этом данные с низкой плотностью и неправильным временем представляют собой данные сельскохозяйственной машины в нерабочем состоянии.
[0038] Согласно одному варианту осуществления настоящего изобретения, этап D дополнительно включает:
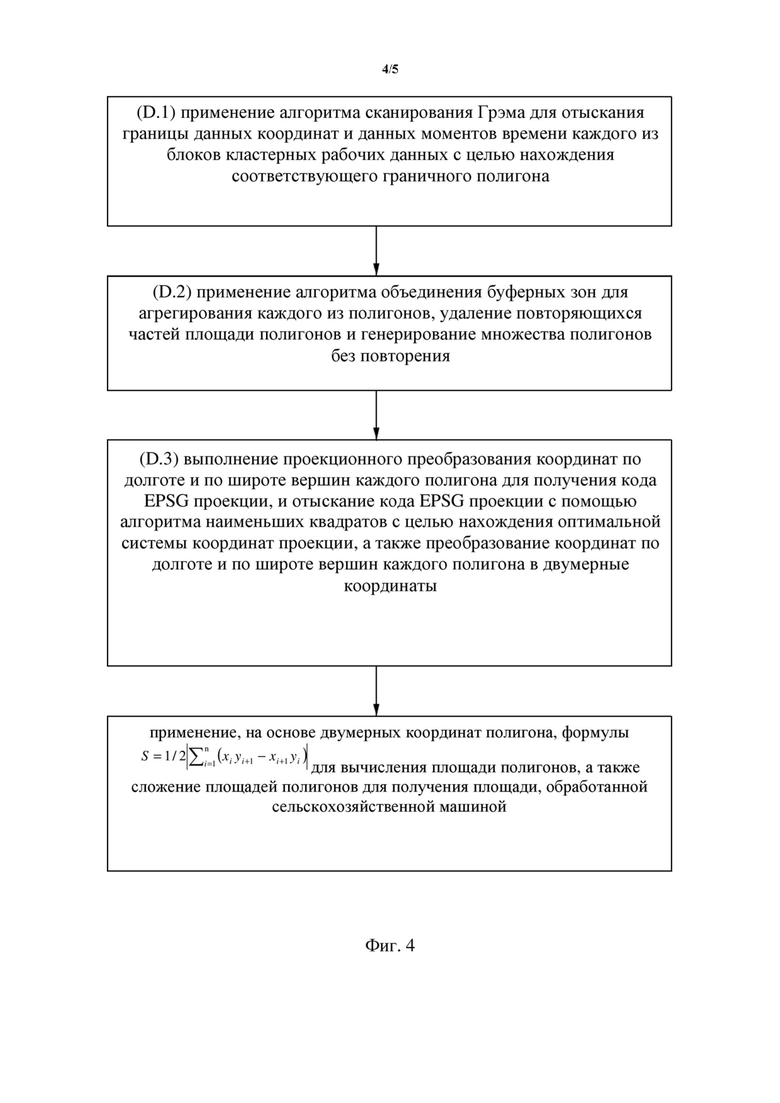
[0039] этап D. 1 применение алгоритма сканирования Грэма для отыскания границы данных координат и данных моментов времени каждого из блоков кластерных рабочих данных сельскохозяйственной машины с целью нахождения полигонов;
[0040] этап D.2 применение алгоритма объединения буферных зон для агрегирования каждого из полигонов, удаление повторяющихся частей площади полигонов и генерирование множества полигонов без повторения;
[0041] этап D.3 выполнение проекционного преобразования координат по долготе и координат по широте вершин каждого полигона для получения кода EPSG проекции, и отыскание кода EPSG с помощью алгоритма наименьших квадратов с целью нахождения оптимальной системы координат проекции, а также преобразование координат по долготе и координат по широте вершин каждого полигона в двумерные координаты; и
[0042] этап D.4 применение, на основе двумерных координат полигона, формулы 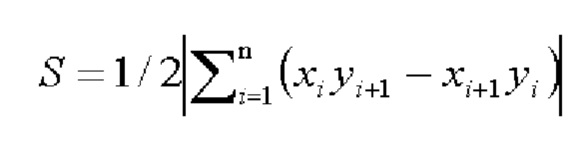 для вычисления площади полигонов, а также сложение площадей полигонов для получения площади, обработанной сельскохозяйственной машиной.
для вычисления площади полигонов, а также сложение площадей полигонов для получения площади, обработанной сельскохозяйственной машиной.
[0043] Согласно другому аспекту настоящего изобретения, в настоящем изобретении предоставлена система определения площади, обработанной сельскохозяйственной машиной, при этом система содержит:
[0044] модуль сбора данных, который получает данные координат сельскохозяйственной машины и данные моментов времени сельскохозяйственной машины, соответствующие данным координат, в пределах некоторого промежутка времени;
[0045] модуль очистки данных, осуществляющий связь с модулем сбора данных, при этом модуль очистки данных выполняет очистку данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины, а также удаление данных координат и данных моментов времени сельскохозяйственной машины не в нормальном рабочем состоянии;
[0046] модуль кластеризации и сегментирования, осуществляющий связь с модулем очистки данных, при этом модуль кластеризации и сегментирования выполняет кластеризацию и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени сельскохозяйственной машины в нормальном рабочем состоянии и нерабочем состоянии, и сохранение данных координат и данных моментов времени сельскохозяйственной машины в нормальном рабочем состоянии в виде блоков кластерных рабочих данных;
модуль генерирования полигонов, осуществляющий связь с модулем кластеризации и сегментирования, при этом модуль генерирования полигонов выполняет генерирование множества полигонов на основе блоков кластерных рабочих данных; и
[0047] модуль вычисления площади, осуществляющий связь с модулем генерирования полигонов, при этом модуль генерирования полигонов выполняет вычисление площади, обработанной сельскохозяйственной машиной, в соответствии с множеством полигонов.
[0048] устройство хранения данных, соединенное с модулем вычисления площади, при этом устройство хранения данных сохраняет площадь, обработанную сельскохозяйственной машиной, для просмотра пользователями.
[0049] Согласно одному варианту осуществления настоящего изобретения, данные координат сельскохозяйственной машины включают данные долготы и данные широты.
[0050] Согласно одному варианту осуществления настоящего изобретения, модуль очистки данных содержит блок удаления повторяющихся данных и блок удаления аномальных данных, при этом блок удаления повторяющихся данных соединен с блоком сбора данных, блок удаления повторяющихся данных выполняет удаление повторяющихся данных долготы и повторяющихся данных широты сельскохозяйственной машины, и блок удаления аномальных данных выполняет очистку данных долготы и данных широты после удаления повторяющихся данных долготы и повторяющихся данных широты, и выполняет очистку данных моментов времени и удаление аномальных данных долготы, данных широты и данных моментов времени.
[0051] Согласно одному варианту осуществления настоящего изобретения, блок удаления повторяющихся данных выполняет сортировку данных долготы и данных широты в хронологическом порядке, а также сохранение одних и тех же данных долготы и одних и тех же данных широты для одного момента времени, когда одни и те же данные долготы и одни и те же данные широты появляются в разные моменты времени.
[0052] Согласно одному варианту осуществления настоящего изобретения, блок удаления аномальных данных выполняет предварительную установку диапазона координат рабочей площади и определяет данные долготы и данные широты, находящихся за пределами этого диапазона координат, как аномальные данные, и удаляет эти аномальные данные.
[0053] Согласно одному варианту осуществления настоящего изобретения указанный диапазон координат включает диапазон данных долготы и диапазон данных широты, блок удаления аномальных данных выполняет предварительную установку диапазона данных долготы как [-90, 90] и диапазона данных широты как [-180, 180].
[0054] Согласно другому аспекту настоящего изобретения, блок удаления аномальных данных выполняет обнаружение аномалий в отношении данных долготы и данных широты сельскохозяйственной машины с помощью алгоритма «изолирующий лес», удаление данных долготы, находящихся за пределами указанного диапазона данных долготы, и удаление данных широты, находящихся за пределами указанного диапазона данных широты.
[0055] Согласно одному варианту осуществления настоящего изобретения модуль кластеризации и сегментирования содержит блок кластеризации и сегментирования, блок определения и блок исполнения, при этом блок кластеризации и сегментирования осуществляет связь с модулем очистки данных, блок определения осуществляет связь с блоком кластеризации и сегментирования, блок исполнения осуществляет связь с блоком определения, блок кластеризации и сегментирования выполняет кластеризацию и сегментирование данных координат и данных моментов времени и получение множества блоков кластерных данных, блок определения выполняет определение типа блоков кластерных данных для различения блоков кластерных данных, относящихся к нерабочему состоянию, и блок исполнения выполняет удаление блоков кластерных данных, относящихся к нерабочему состоянию, и получение блоков кластерных рабочих данных.
[0056] Согласно одному варианту осуществления настоящего изобретения, в блоке кластеризации и сегментирования для кластеризации и сегментирования данных координат и данных моментов времени после очистки применяется алгоритм T-DBSCAN.
[0057] Согласно одному варианту осуществления настоящего изобретения блок кластеризации и сегментирования выполняет коррекцию порогового значения времени, τ, радиуса плотности, r, и порогового значения плотности, ε, алгоритма T-DBSCAN.
[0058] Согласно одному варианту осуществления настоящего изобретения блок определения выполняет определение типа блоков кластерных данных в соответствии с плотностью данных и правильностью времени, и блоками кластерных данных, относящихся к нерабочему состоянию, являются блоки кластерных данных с низкой плотностью данных и неправильным временем.
[0059] Согласно одному варианту осуществления настоящего изобретения модуль генерирования полигонов содержит блок генерирования полигонов и блок контроля повторений, и блок контроля повторений соединен с блоком генерирования полигонов, блок генерирования полигонов соединен с блоком 33 исполнения модуля кластеризации и сегментирования, блок генерирования полигонов получает граничные полигоны, соответствующие блокам кластерных рабочих данных в соответствии с данными координат и данными моментов времени блоков кластерных рабочих данных, и блок контроля повторений выполняет агрегирование граничных полигонов и удаляет повторяющуюся часть площади граничных полигонов, а также генерирует множество полигонов без повторений.
[0060] Согласно одному варианту осуществления настоящего изобретения в блоке генерирования полигонов для отыскания границы данных координат и данных моментов времени каждого из блоков кластерных рабочих данных сельскохозяйственной машины с целью нахождения полигонов применяется алгоритм сканирования Грэма.
[0061] Согласно одному варианту осуществления настоящего изобретения, блок контроля повторений применяет алгоритм объединения буферных зон для агрегирования каждого из полигонов, выполняет удаление повторяющейся части площади полигонов и генерирует множество полигонов без повторений.
Согласно одному варианту осуществления настоящего изобретения, модуль вычисления площади содержит блок преобразования и блок вычисления, и блок преобразования соединен с блоком контроля повторений блока генерирования полигонов, и блок вычисления соединен с блоком преобразования, при этом блок преобразования выполняет проекционное преобразование координат по долготе и координат по широте вершин каждого полигона для получения кода EPSG проекции, и блок вычисления выполняет отыскание кода EPSG с помощью алгоритма наименьших квадратов с целью нахождения оптимальной системы координат проекции, а также преобразование координат по долготе и координат по широте вершин каждого полигона в двумерные координаты; и блок вычисления выполняет применение, на основе двумерных координат полигона, формулы для вычисления площади полигонов, а также сложение площадей полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
[0062] Согласно одному варианту осуществления настоящего изобретения система дополнительно содержит устройство хранения данных, при этом в устройстве хранения данных хранятся данные координат, данные моментов времени и площадь, обработанная сельскохозяйственной машиной.
Краткое описание графических материалов
[0063] Варианты реализации настоящего изобретения будут описаны ниже посредством вариантов осуществления со ссылкой на прилагаемые фигуры.
[0064] На фиг. 1 представлена схема последовательности операций одного варианта осуществления способа вычисления площади, обработанной сельскохозяйственной машиной.
[0065] На фиг. 2 представлена частичная схема последовательности операций одного варианта осуществления способа.
[0066] На фиг. 3 представлена частичная схема последовательности операций другого варианта осуществления способа вычисления площади, обработанной сельскохозяйственной машиной.
[0067] На фиг. 4 представлена частичная схема последовательности операций другого варианта осуществления указанного способа.
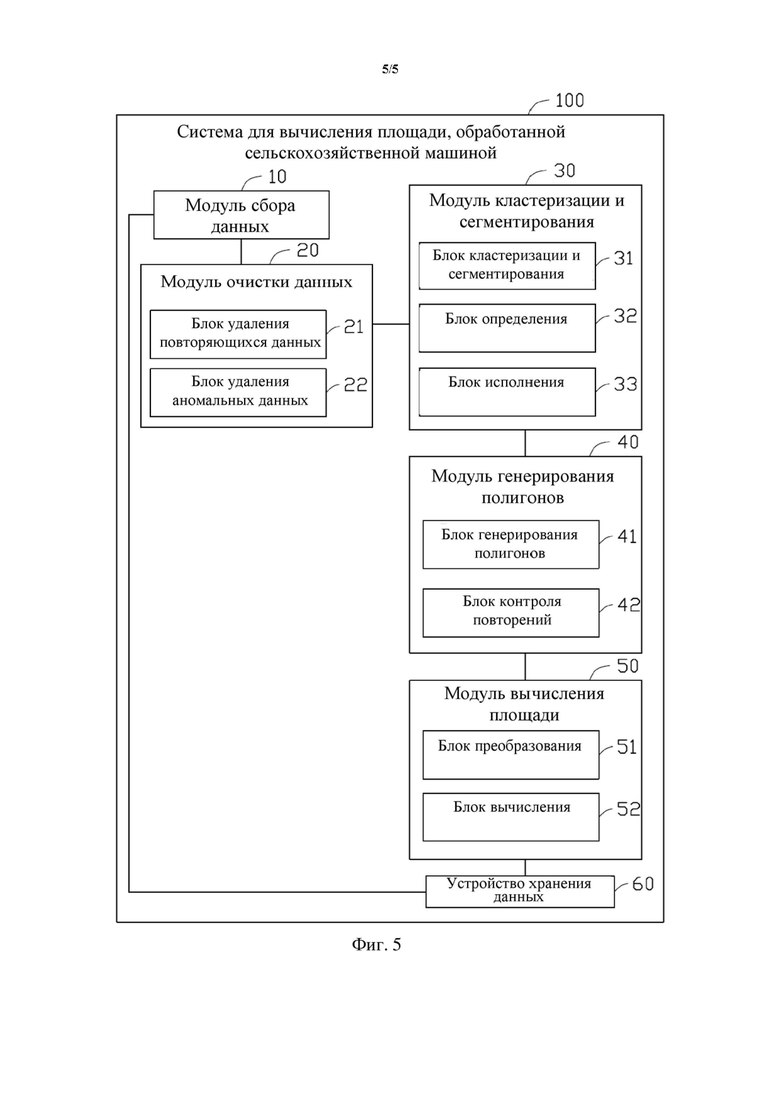
[0068] На фиг. 5 представлена блок-схема одного варианта осуществления системы для вычисления площади, обработанной сельскохозяйственной машиной.
Подробное описание
[0069] Описанные ниже предпочтительные варианты осуществления являются лишь примерами, и специалисты в данной области техники могут придумать другие очевидные варианты осуществления. Базовые принципы настоящего изобретения, определенные в следующем описании, могут быть применены к другим вариантам осуществления, развитиям вариантов осуществления, схемам усовершенствования, эквивалентным схемам и другим техническим схемам, которые не отклоняются от сущности и объема настоящего изобретения.
[0070] Технические специалисты в данной области техники должны понимать, что в раскрытии настоящего изобретения термин «вертикальное направление», «горизонтальное направление», «верхний», «нижний», «передний», «задний», «левый», «правый», «вертикальный», «горизонтальный», «верхний», «нижний», «внутренний», «наружный» и другие указатели ориентации или взаимного расположения основаны на ориентации или взаимном расположении, показанном на графических материалах, и предназначены только для содействия описанию настоящего изобретения и упрощения описания, а не для указания или предположения того, что устройство или компонент должен иметь конкретную ориентацию в конкретном направлении и в ходе конкретной операции, поэтому приведенные выше термины не следует понимать как ограничения настоящего изобретения.
[0071] Можно понять, что термин «один» следует понимать как «по меньшей мере один» или «один или более», т.е. в одном варианте осуществления количество одного компонента может составлять один, тогда как в другом варианте осуществления количество компонентов может являться множественным, поэтому термин «один» нельзя понимать как ограничение в отношении количества.
[0072] Со ссылкой на фиг. 1-4 настоящего раскрытия изображен способ вычисления площади, обработанной сельскохозяйственной машиной. С помощью данного способа можно точно вычислить площадь, обработанную сельскохозяйственной машиной, для целей сельского хозяйства. Дополнительно, система 100 для вычисления площади, обработанной сельскохозяйственной машиной, подходит для вычисления площадей сельхозугодий разных типов, и это вычисление является точным, что способствует распределению затрат операторов сельскохозяйственных машин, вычислению дотаций согласно национальной политике, национальных статистических данных о сельском хозяйстве и т.д.
[0073] В способе вычисления площади, обработанной сельскохозяйственной машиной, предусмотрен этап (А) получения данных координат и данных моментов времени сельскохозяйственной машины в пределах некоторого промежутка времени, для которого необходимо вычислить обработанную площадь. В одном варианте осуществления данные координат сельскохозяйственной машины могут представлять собой данные долготы и данные широты. В одном варианте осуществления данные координат сельскохозяйственной машины также могут представлять собой данные двумерных координат. В одном варианте осуществления способ согласно настоящему изобретению в качестве примера описан для данных координат сельскохозяйственной машины, содержащих данные долготы и широты.
[0074] После этапа (А) предусмотрен этап (В) очистки данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины, и удаления данных координат и данных моментов времени сельскохозяйственной машины, когда она действует не в нормальном рабочем состоянии.
[0075] В одном варианте осуществления со ссылкой на фиг. 2 этап (В) дополнительно включает этап (В.1) удаления повторяющихся данных координат сельскохозяйственной машины и повторяющихся данных моментов времени сельскохозяйственной машины, то есть удаления данных сельскохозяйственной машины, действующей в повторяющемся рабочем состоянии. В одном варианте осуществления, со ссылкой на фиг. 3, этап (В.1) включает следующие этапы:
[0076] этап (b.l) сортировки данных координат сельскохозяйственной машины в хронологическом порядке; и
[0077] этап (b.2) удаления повторяющихся данных из данных координат сельскохозяйственной машины. В одном варианте осуществления, когда одни и те же данные долготы и одни и те же данные широты появляются в разные моменты времени, сохраняется копия одних и тех же данных долготы и одних и тех же данных широты в один момент времени. В одном варианте осуществления сохраняется копия одних и тех же данных долготы и одних и тех же данных широты в любой момент времени, с помощью такого алгоритма способ может избегать вычисления площади, обработанной сельскохозяйственной машиной в повторяющемся рабочем состоянии, что способствует уменьшению разности между обработанной площадью, вычисленной с помощью данного способа, и фактически обработанной площадью.
[0078] В одном варианте осуществления этап (В) дополнительно включает этап (В.2) очистки данных координат и данных моментов времени сельскохозяйственной машины, и удаления аномальных данных. В одном варианте осуществления предварительно устанавливается диапазон координат подлежащей вычислению рабочей площади, и данные долготы и данные широты за пределами этого диапазона координат можно определить как аномальные данные, которые не принадлежат к данным сельскохозяйственной машины, действующей в нормальном рабочем состоянии, и они не будут использованы в качестве основы вычислений для вычисления площади, обработанной сельскохозяйственной машиной. В одном варианте осуществления аномальные данные координат и данные моментов времени, соответствующие аномальным координатам, удаляются во избежание использования этих аномальных данных для вычисления площади, обработанной сельскохозяйственной машиной, что способствует повышению точности способа.
[0079] В одном варианте осуществления в предварительно установленном диапазоне координат диапазон данных долготы составляет [-90, 90], и диапазон данных широты составляет [-180, 180]. В одном варианте осуществления обнаружение аномалий выполняется в отношении данных долготы и данных широты сельскохозяйственной машины с помощью алгоритма «изолирующий лес», и данные долготы и данные широты, находящихся за пределами диапазона данных долготы и данных широты, удаляются. Специалистам в данной области техники следует понимать, что данные варианты осуществления предварительно установленного диапазона координат и алгоритма обнаружения аномалий использованы лишь в качестве примера и не могут ограничивать содержание и объем способа настоящего изобретения.
[0080] В одном варианте осуществления этап (В.1) выполняют после этапа (В.2). В другом варианте осуществления этап (В.1) выполняют перед этапом (В.2). Конкретная последовательность из этапа (В.1) и этапа (В.2) не может ограничивать содержание и объем способа настоящего изобретения.
[0081] В одном варианте осуществления способ дополнительно включает этап (С) кластеризации и сегментирования данных координат и данных моментов времени сельскохозяйственной машины после очистки, различение данных координат и данных моментов времени сельскохозяйственной машины, действующей в нормальном рабочем состоянии и нерабочем состоянии, и сохранение данных координат и данных моментов времени сельскохозяйственной машины, действующей в нормальном рабочем состоянии.
[0082] В одном варианте осуществления этап (С) дополнительно включает: применение алгоритма T-DBSCAN для кластеризации и сегментирования данных координат и данных моментов времени сельскохозяйственной машины после очистки, и получение некоторого количества блоков кластерных данных. В одном варианте осуществления коррекция ключевых параметров алгоритма T-DBSCAN, порогового значения времени, τ, радиуса плотности, r, и порогового значения плотности, ε выполняется с помощью алгоритма «Hyperopt» (оптимизации гиперпараметров) для обеспечения максимальной релевантности подобных данных и минимальной релевантности данных, не являющихся подобными, после кластеризации.
[0083] В одном варианте осуществления этап (С) дополнительно включает: удаление блоков кластерных данных, относящихся к нерабочему состоянию, из блоков кластерных данных и сохранение блоков кластерных рабочих данных. В одном варианте осуществления каждый блок кластерных данных, полученный после сегментирования, обеспечивает подобие во времени и пространстве. В одном варианте осуществления блоки кластерных данных определяются как блоки кластерных данных, относящихся к нерабочему состоянию, если плотность блоков кластерных данных является низкой, и время блоков кластерных данных является неправильным. После удаления блоков кластерных данных, относящихся к нерабочему состоянию, остальные блоки кластерных данных представляют собой блоки кластерных рабочих данных, что, таким образом, обеспечивает то, что используемые данные представляют собой рабочие данные для вычисления площади, обработанной сельскохозяйственной машиной, и обеспечивает дополнительную точность вычисления.
[0084] В одном варианте осуществления после этапа (С) способ дополнительно включает этап (D) генерирования некоторого количества полигонов на основе каждого из блоков кластерных рабочих данных и вычисления площади, обработанной сельскохозяйственной машиной, в соответствии с этим некоторым количеством полигонов.
[0085] Со ссылкой на фиг. 4 этап D дополнительно включает этап (D.1) применения алгоритма сканирования Грэма для отыскания границы данных координат и данных моментов времени каждого из блоков кластерных рабочих данных с целью нахождения полигонов.
[0086] В одном варианте осуществления после этапа (D.1) способ дополнительно включает этап (D.2) применения алгоритма объединения буферных зон для агрегирования каждого из полигонов, удаления повторяющейся части площади полигонов и генерирования множества полигонов без повторений.
[0087] В одном варианте осуществления после этапа (D.2) способ дополнительно включает этап (D.3) выполнения проекционного преобразования координат по долготе и широте вершин каждого полигона для получения кода EPSG проекции, и отыскание кода EPSG проекции с помощью алгоритма наименьших квадратов с целью нахождения оптимальной системы координат проекции и преобразования координат по долготе и широте вершин каждого полигона в двумерные координаты. В одном варианте осуществления после этапа (D.3) способ дополнительно включает этап (D.4) применения, на основе двумерных координат полигонов, формулы для вычисления площади полигонов и сложения площадей полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
[0088] Следует отметить, что имеется небольшая разность между площадью, вычисленной с помощью способа, предоставленного в настоящей заявке, и фактической площадью, обработанной сельскохозяйственной машиной. Дополнительно, в процессе опытно-конструкторской разработки для контроля эффективности способа, предоставленного в настоящей заявке, счетчик площади устанавливали на тракторе, обрабатывающем поля с площадью 98 акров, 560 акров и 2200 акров соответственно, и трактор перемещался по полям путем случайных перемещений и повторяющихся действий на выбранных полях случайным образом. Каждое поле давало 10 групп данных, и площадь, обработанную трактором, вычисляли способом вычисления площади, обработанной сельскохозяйственной машиной, предоставленным в настоящей заявке. Проверка результатов вычислений показывает, что средние ошибки и дисперсии 10 групп данных на каждую площадь поля с использованием способа согласно настоящей заявке составляют 99,7/0,03%, 99,5/0,06% и 99,8/0,01% соответственно. Поэтому способ вычисления площади, обработанной сельскохозяйственной машиной, согласно настоящей заявке характеризуется высокой точностью и устойчивостью, а также удовлетворяет требованию точности вычисления.
[0089] Со ссылкой на фиг. 5 настоящего раскрытия изображена система 100 для вычисления площади, обработанной сельскохозяйственной машиной, заключенная в электронном устройстве 1. С помощью данной системы 100 можно точно вычислять площадь, обработанную сельскохозяйственной машиной. Система 100 содержит модуль 10 сбора данных, модуль 20 очистки данных, модуль 30 кластеризации и сегментирования, модуль 40 генерирования полигонов и модуль 50 вычисления площади. Модуль 10 сбора данных выполняет сбор данных координат и данных моментов времени сельскохозяйственной машины. Модуль 20 очистки данных соединен с модулем 10 сбора данных и выполняет очистку данных координат и данных моментов времени сельскохозяйственной машины с целью удаления данных, которые были собраны, когда сельскохозяйственная машина действовала в нерабочем состоянии. Модуль 30 кластеризации и сегментирования соединен с модулем 20 очистки данных. Модуль 30 кластеризации и сегментирования выполняет кластеризацию и сегментирование в отношении данных координат и данных моментов времени после очистки, а также получение блоков кластерных рабочих данных сельскохозяйственной машины, действующей в нормальном рабочем состоянии. Модуль 40 генерирования полигонов соединен с модулем 30 кластеризации и сегментирования, и модуль 40 генерирования полигонов генерирует соответствующие полигоны на основе блоков кластерных рабочих данных, полученных в модуле 30 кластеризации и сегментирования. Модуль 50 вычисления площади соединен с модулем 40 генерирования полигонов, и модуль 50 вычисления площади выполняет вычисление площади, обработанной сельскохозяйственной машиной, на основе площади полигонов, сгенерированных модулем 40 генерирования полигонов.
[0090] В одном варианте осуществления модуль 10 сбора данных получает данные координат и данные моментов времени сельскохозяйственной машины, соответствующие данным координат в течение некоторого промежутка времени при вычислении площади, обработанной сельскохозяйственной машиной, путем осуществления связи с центральным управляющим компьютером сельскохозяйственной машины. Например, модуль 10 сбора данных выполняет получение данных координат и данных моментов времени сельскохозяйственной машины от центрального управляющего компьютера, соединенного с сельскохозяйственной машиной с помощью проводного соединения или беспроводного соединения. В одном варианте осуществления модуль 10 сбора данных обеспечивает возможность ввода пользователем данных координат и данных моментов времени сельскохозяйственной машины с помощью ручного ввода или ручного выбора. Специалистам в данной области техники будет понятно, что вариант осуществления модуля 10 сбора данных, который выполнят сбор данных координат и данных моментов времени сельскохозяйственной машины представляет собой лишь пример и не может ограничивать содержание и объем способа, предоставленного в настоящей заявке.
[0091] В одном варианте осуществления данные координат сельскохозяйственной машины могут представлять собой данные долготы и данные широты. В одном варианте осуществления данные координат сельскохозяйственной машины также могут представлять собой данные двумерных координат. В одном варианте осуществления система согласно настоящему изобретению в качестве примера описана для данных координат сельскохозяйственной машины как данных долготы и данных широты.
[0092] В одном варианте осуществления модуль 20 очистки данных содержит блок 21 удаления повторяющихся данных и блок 22 удаления аномальных данных. Блок 21 удаления повторяющихся данных соединен с модулем 10 сбора данных. Блок 21 удаления повторяющихся данных получает данные координат и данные моментов времени сельскохозяйственной машины.
[0093] Блок 21 удаления повторяющихся данных выполняет сортировку данных координат сельскохозяйственной машины в хронологическом порядке и удаление повторяющихся данных координат сельскохозяйственной машины. В одном варианте осуществления, когда одни и те же данные долготы и одни и те же данные широты появляются в разные моменты времени, блок 21 удавления повторяющихся данных сохраняет копию одних и тех же данных долготы и одних и тех же данных широты в один момент времени. В одном варианте осуществления, когда блок 21 удаления повторяющихся данных определяет, что данные долготы и данные широты сельскохозяйственной машины являются повторяющимися, блок 21 удаления повторяющихся данных сохраняет данные в самый ранний момент времени и удаляет повторяющиеся данные. В одном варианте осуществления, когда блок 21 удаления повторяющихся данных определяет, что данные долготы и данные широты сельскохозяйственной машины являются повторяющимися, блок 21 удаления повторяющихся данных сохраняет данные широты и данные долготы, соответствующие любому моменту времени, и удаляет повторяющиеся данные.
[0094] В одном варианте осуществления блок 22 удаления аномальных данных соединен с блоком 21 удаления повторяющихся данных, и блок 22 удаления аномальных данных выполняет очистку данных координат и данных моментов времени сельскохозяйственной машины после удаления повторяющихся данных с целью удаления аномальных данных. В одном варианте осуществления блок 22 удаления аномальных данных выполняет предварительную установку диапазона координат рабочей площади для вычисления обработанной площади. Когда данные координат сельскохозяйственной машины находятся за пределами указанного диапазона координат, и блок 22 удаления аномальных данных определяет данные долготы и данные широты, находящиеся за пределами указанного диапазона координат, как аномальные данные и выполняет удаление этих аномальных данных, которые не используются как основа для вычисления площади, обработанной сельскохозяйственной машиной.
[0095] В одном варианте осуществления блок 22 удаления аномальных данных выполняет предварительную установку диапазона данных долготы как [-90, 90] и диапазона данных широты как [-180, 180]. В одном варианте осуществления блок 22 удаления аномальных данных выполняет обнаружение аномалий в отношении данных долготы и данных широты сельскохозяйственной машины с помощью алгоритма «изолирующий лес», и удаление данных долготы, находящихся за пределами указанного диапазона данных долготы, а также данных широты, находящихся за пределами указанного диапазона данных широты. Специалистам в данной области техники следует понимать, что варианты осуществления предварительно установленного диапазона координат и алгоритма «изолирующий лес» для обнаружения аномальных данных используются лишь в качестве примеров и не могут представлять собой ограничение содержания и объема системы 100 для вычисления площади, обработанной сельскохозяйственной машиной, согласно настоящей заявке.
[0096] В одном варианте осуществления блок 22 удаления аномальных данных соединен с блоком 10 сбора данных, блок 22 удаления аномальных данных получает данные координат и данные моментов времени сельскохозяйственной машины, и блок 22 удаления аномальных данных выполняет очистку данных координат и данных моментов времени сельскохозяйственной машины с целью удаления аномальных данных. В одном варианте осуществления блок 21 удаления повторяющихся данных выполняет удаление повторяющихся данных из данных координат и данных моментов времени сельскохозяйственной машины после удаления аномальных данных.
[0097] В одном варианте осуществления модуль 30 кластеризации и сегментирования содержит блок 31 кластеризации и сегментирования, блок 32 определения и блок 33 исполнения. В одном варианте осуществления блок 31 кластеризации и сегментирования соединен с модулем 20 очистки данных. Блок 31 кластеризации и сегментирования выполняет кластеризацию и сегментирование данных координат и данных моментов времени сельскохозяйственной машины, и получает некоторое количество блоков кластерных данных. Блок 32 определения соединен с блоком 31 кластеризации и сегментирования. Блок 32 определения выполняет определение типа блоков кластерных данных и различение блока кластерных рабочих данных и блоков кластерных данных, относящихся к нерабочему состоянию. Блоки кластерных рабочих данных соответствуют рабочим данным сельскохозяйственной машины, действующей в нормальном рабочем состоянии, а блок кластерных данных, относящихся к нерабочему состоянию, соответствует рабочим данным сельскохозяйственной машины, действующей в нерабочем состоянии. Кроме того, блок 33 исполнения соединен с блоком 32 определения, и блок 33 исполнения выполняет удаление блоков кластерных данных, относящихся к нерабочему состоянию, и получение блоков кластерных рабочих данных.
[0098] В одном варианте осуществления блок 31 кластеризации и сегментирования применяет алгоритм T-DBSCAN для кластеризации и сегментирования данных координат и данных моментов времени сельскохозяйственной машины после очистки, и выполняет получение некоторого количества блоков кластерных данных. В одном варианте осуществления коррекция ключевых параметров алгоритма T-DBSCAN, порогового значения времени, τ, радиуса плотности, r, и порогового значения плотности, ε, выполняется с помощью алгоритма «Hyperopt» (оптимизации гиперпараметров) для обеспечения максимальной релевантности подобных данных и минимальной релевантности данных, не являющихся подобными, после кластеризации.
[0099] В одном варианте осуществления блок 32 определения выполняет определение и сегментирование типов блоков кластерных данных на основе плотности и правильности данных. В одном варианте осуществления блоки кластерных данных с низкой плотностью данных и неправильным временем определяются как блоки кластерных данных, относящихся к нерабочему состоянию, а блоки кластерных данных с высокой плотностью данных и правильным временем определяются как блоки кластерных рабочих данных.
[00100] Модуль 40 генерирования полигонов соединен с блоком 33 исполнения, модуль 40 генерирования полигонов содержит блок 41 генерирования полигонов и блок 42 контроля повторений, и блок 42 контроля повторений соединен с блоком 41 генерирования полигонов. Блок 41 генерирования полигонов соединен с блоком 30 исполнения модуля 30 кластеризации и сегментирования.
[00101] Блок 41 генерирования полигонов получает граничные полигоны, соответствующие блокам кластерных рабочих данных на основе данных координат и данных моментов времени каждого из блоков кластерных данных. В одном варианте осуществления в блоке 41 генерирования полигонов для отыскания границы данных координат и данных моментов времени каждого из блоков кластерных рабочих данных с целью нахождения соответствующих граничных полигонов применяется алгоритм сканирования Грэма.
[00102] В одном варианте осуществления блок 42 контроля повторений выполняет агрегирование граничных полигонов, сгенерированных блоком 41 генерирования полигонов, удаление повторяющейся части площади граничных полигонов и генерирование множества полигонов без повторений. В одном варианте осуществления блок 42 контроля повторений выполняет агрегирование каждого из граничных полигонов с применением алгоритма объединения буферных зон, удаление повторяющейся части площади граничных полигонов и генерирование множества полигонов без повторений.
[00103] В одном варианте осуществления блок 50 вычисления площади соединен с блоком 42 контроля повторений модуля 40 генерирования полигонов. Модуль 50 вычисления площади выполняет вычисление площади каждого из полигонов, а также сложение площадей всех полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
[00104] В одном варианте осуществления модуль 50 вычисления площади содержит блок 51 преобразования и блок 52 вычисления. Блок 51 преобразования соединен с блоком 42 контроля повторений модуля 40 генерирования полигонов, и блок 52 вычисления соединен с блоком 51 преобразования.
[00105] В одном варианте осуществления блок 51 преобразования выполняет проекционное преобразование координат по долготе и координат по широте вершин каждого полигона для получения кода EPSG проекции, и отыскание кода EPSG проекции с помощью алгоритма наименьших квадратов с целью нахождения оптимальной системы координат проекции, а также преобразование координат по долготе и широте вершин каждого полигона в двумерные координаты. В одном варианте осуществления блок вычисления применяет формулу вычисления площади полигонов, , для вычисления площади полигонов и выполняет сложение площадей полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
[00106] В одном варианте осуществления система 100 для вычисления площади, обработанной сельскохозяйственной машиной, дополнительно содержит устройство 60 хранения данных. Систему 100 применяют в электронном устройстве 1. Устройство 60 хранения данных соединено с модулем 50 вычисления площади и модулем 10 сбора данных. В устройстве 60 хранения данных хранятся данные координат, данные моментов времени и соответствующая площадь, обработанная сельскохозяйственной машиной, что может быть удобно для непосредственного просмотра и вызова последующими пользователями.
[00107] В одном варианте осуществления термины «модуль» и «блок» в рамках настоящего документа относятся к логике, воплощенной в аппаратном обеспечении или программно-аппаратном обеспечении, или к набору программных команд, написанных на языке программирования, таком как, например, Java, С или ассемблер. Одна или более программных команд в функциональных модулях могут быть воплощены в программно-аппаратном обеспечении. Следует понимать, что функциональные модули могут содержать подключенные логические модули, такие как вентили и триггеры, и могут содержать программируемые модули, такие как программируемые вентильные матрицы или процессоры. Функциональный модуль, описанный в настоящем документе, может быть реализован как программные модули и/или аппаратные модули и может храниться в устройстве хранения данных.
[00108] Специалисты в данной области техники должны понимать, что приведенное выше описание и варианты осуществления настоящего изобретения, показанные на графических материалах, являются лишь примерами и не ограничивают настоящее изобретение. Цель настоящего изобретения была полностью и эффективно достигнута. Функция и конструктивный принцип настоящего изобретения были показаны и объяснены в вариантах осуществления. Без отступления от принципа реализация настоящего изобретения может иметь любое изменение формы или модификацию.
Использование: для определения площади, обработанной сельскохозяйственной машиной. Сущность изобретения заключается в том, что осуществляют: получение данных координат сельскохозяйственной машины и данных моментов времени, соответствующих этим данным координат, в пределах некоторого промежутка времени; очистку данных координат и данных моментов времени, а также удаление данных координат и данных моментов времени в аномальном рабочем состоянии; кластеризацию и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени в нормальном рабочем состоянии и нерабочем состоянии, и сохранение данных координат и данных моментов времени в нормальном рабочем состоянии; и генерирование множества полигонов на основе данных координат и данных моментов времени в нормальном рабочем состоянии, а также вычисление площади, обработанной сельскохозяйственной машиной, в соответствии с этим множеством полигонов; хранение площади, обработанной сельскохозяйственной машиной, для просмотра пользователями. Технический результат: обеспечение возможности точного определения площади, обработанной сельскохозяйственной машиной. 2 н. и 24 з.п. ф-лы, 5 ил.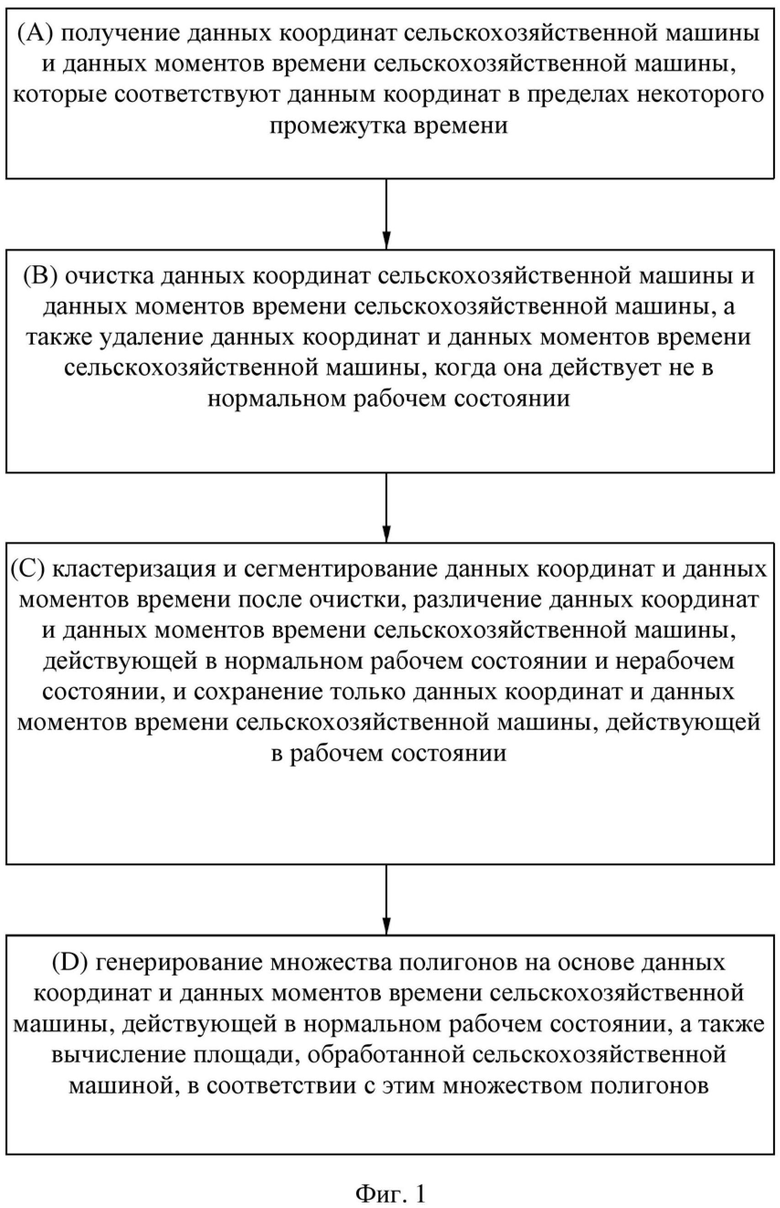
1. Способ определения площади, обработанной сельскохозяйственной машиной, который включает:
получение данных координат сельскохозяйственной машины и данных моментов времени, соответствующих этим данным координат, в пределах некоторого промежутка времени;
очистку данных координат и данных моментов времени, а также удаление данных координат и данных моментов времени в аномальном рабочем состоянии;
кластеризацию и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени в нормальном рабочем состоянии и нерабочем состоянии, и сохранение данных координат и данных моментов времени в нормальном рабочем состоянии; и
генерирование множества полигонов на основе данных координат и данных моментов времени в нормальном рабочем состоянии, а также вычисление площади, обработанной сельскохозяйственной машиной, в соответствии с этим множеством полигонов;
хранение площади, обработанной сельскохозяйственной машиной, для просмотра пользователями.
2. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 1, отличающийся тем, что очистка данных координат и данных моментов времени, а также удаление данных координат и данных моментов времени в аномальном рабочем состоянии включает:
удаление повторяющихся данных из данных координат и данных моментов времени;
очистку данных координат и данных моментов времени, а также удаление аномальных данных из данных координат и данных моментов времени.
3. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 2, отличающийся тем, что удаление повторяющихся данных из данных координат и данных моментов времени включает:
сортировку данных координат в хронологическом порядке; и
удаление повторяющихся данных из данных координат в соответствии с хронологическим порядком.
4. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 2, отличающийся тем, что очистка данных координат и данных моментов времени, а также удаление аномальных данных из данных координат и данных моментов времени включает:
предварительную установку диапазона координат рабочей площади, удаление данных координат, находящихся за пределами этого диапазона координат рабочей площади, и удаление данных моментов времени, соответствующих удаленным данным координат.
5. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 4, отличающийся тем, что:
диапазон координат содержит диапазон данных долготы и диапазон данных широты; и
диапазон данных долготы составляет [-90, 90], и диапазон данных широты составляет [-180, 180].
6. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 2, отличающийся тем, что очистка данных координат и данных моментов времени, а также удаление аномальных данных из данных координат и данных моментов времени включает:
выполнение обнаружения аномалий в отношении данных координат с помощью алгоритма «изолирующий лес» и удаление данных координат, находящихся за пределами указанного диапазона координат.
7. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 1, отличающийся тем, что кластеризация и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени в нормальном рабочем состоянии и нерабочем состоянии, а также сохранение данных координат и данных моментов времени в нормальном рабочем состоянии включает:
применение алгоритма T-DBSCAN для кластеризации и сегментирования данных координат и данных моментов времени после очистки, а также получение множества блоков кластерных данных.
8. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 1, отличающийся тем, что кластеризация и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени в нормальном рабочем состоянии и нерабочем состоянии, а также сохранение данных координат и данных моментов времени в нормальном рабочем состоянии включает:
коррекцию порогового значения времени, τ, радиуса плотности, r, и порогового значения плотности, ε, алгоритма T-DBSCAN.
9. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 8, отличающийся тем, что кластеризация и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени в нормальном рабочем состоянии и нерабочем состоянии, а также сохранение данных координат и данных моментов времени в нормальном рабочем состоянии дополнительно включает:
различение данных в нормальном рабочем состоянии и в нерабочем состоянии в соответствии с плотностью данных и правильностью времени, при этом данные с низкой плотностью данных и неправильным временем представляют собой данные в нерабочем состоянии.
10. Способ определения площади, обработанной сельскохозяйственной машиной, по п. 1, отличающийся тем, что генерирование множества полигонов на основе данных координат и данных моментов времени в нормальном рабочем состоянии, а также вычисление площади, обработанной сельскохозяйственной машиной, в соответствии с этим множеством полигонов включает:
отыскание границы данных координат и данных моментов времени каждого из блоков кластерных рабочих данных с применением алгоритма сканирования Грэма и получение полигонов;
агрегирование каждого из полигонов с применением алгоритма объединения буферных зон, удаление повторяющейся части площади полигонов и генерирование множества полигонов без повторений;
выполнение проекционного преобразования координат по долготе и координат по широте вершин каждого полигона для получения кода EPSG проекции, и отыскание кода EPSG с помощью алгоритма наименьших квадратов с целью нахождения оптимальной системы координат проекции, а также преобразование координат по долготе и координат по широте вершин каждого полигона в двумерные координаты; и
применение, на основе двумерных координат полигона, формулы  для вычисления площади полигонов, а также сложение площадей полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
для вычисления площади полигонов, а также сложение площадей полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
11. Система для определения площади, обработанной сельскохозяйственной машиной, которая содержит:
модуль сбора данных, который получает данные координат сельскохозяйственной машины и данные моментов времени сельскохозяйственной машины, соответствующие данным координат, в пределах некоторого промежутка времени;
модуль очистки данных, осуществляющий связь с модулем сбора данных, при этом модуль очистки данных выполняет очистку данных координат сельскохозяйственной машины и данных моментов времени сельскохозяйственной машины, а также удаление данных координат и данных моментов времени сельскохозяйственной машины не в нормальном рабочем состоянии;
модуль кластеризации и сегментирования, осуществляющий связь с модулем очистки данных, при этом модуль кластеризации и сегментирования выполняет кластеризацию и сегментирование данных координат и данных моментов времени после очистки, различение данных координат и данных моментов времени сельскохозяйственной машины в нормальном рабочем состоянии и нерабочем состоянии, и сохранение данных координат и данных моментов времени сельскохозяйственной машины в нормальном рабочем состоянии в виде блоков кластерных рабочих данных;
модуль генерирования полигонов, осуществляющий связь с модулем кластеризации и сегментирования, при этом модуль генерирования полигонов выполняет генерирование множества полигонов на основе блоков кластерных рабочих данных; и
модуль вычисления площади, осуществляющий связь с модулем генерирования полигонов, при этом модуль генерирования полигонов выполняет вычисление площади, обработанной сельскохозяйственной машиной, в соответствии с множеством полигонов;
устройство хранения данных, соединенное с модулем вычисления площади, при этом устройство хранения данных сохраняет площадь, обработанную сельскохозяйственной машиной, для просмотра пользователями.
12. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 11, отличающаяся тем, что данные координат сельскохозяйственной машины содержат данные долготы и данные широты.
13. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 12, отличающаяся тем, что модуль очистки данных содержит блок удаления повторяющихся данных и блок удаления аномальных данных, при этом блок удаления повторяющихся данных соединен с блоком сбора данных, блок удаления повторяющихся данных выполняет удаление повторяющихся данных долготы и повторяющихся данных широты сельскохозяйственной машины, и блок удаления аномальных данных выполняет очистку данных долготы и данных широты после удаления повторяющихся данных долготы и повторяющихся данных широты, очистку данных моментов времени и удаление аномальных данных долготы, данных широты и данных моментов времени.
14. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 13, отличающаяся тем, что блок удаления повторяющихся данных выполняет сортировку данных долготы и данных широты в хронологическом порядке, а также сохранение одних и тех же данных долготы и одних и тех же данных широты для одного момента времени, когда одни и те же данные долготы и одни и те же данные широты появляются в разные моменты времени.
15. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 14, отличающаяся тем, что блок удаления аномальных данных выполняет предварительную установку диапазона координат рабочей площади, а также определение данных долготы и данных широты, находящихся за пределами этого диапазона координат, как аномальных данных, и удаление этих аномальных данных.
16. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 15, отличающаяся тем, что указанный диапазон координат включает диапазон данных долготы и диапазон данных широты, и блок удаления аномальных данных выполняет предварительную установку диапазона данных долготы как [-90, 90] и диапазона данных широты как [-180, 180].
17. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 16, отличающаяся тем, что блок удаления аномальных данных выполняет обнаружение аномалий в отношении данных долготы и данных широты сельскохозяйственной машины с помощью алгоритма «изолирующий лес», удаление данных долготы, находящихся за пределами указанного диапазона данных долготы, и удаление данных широты, находящихся за пределами указанного диапазона данных широты.
18. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 11, отличающаяся тем, что модуль кластеризации и сегментирования содержит блок кластеризации и сегментирования, блок определения и блок исполнения, при этом блок кластеризации и сегментирования осуществляет связь с модулем очистки данных, блок определения осуществляет связь с блоком кластеризации и сегментирования, блок исполнения осуществляет связь с блоком определения, блок кластеризации и сегментирования выполняет кластеризацию и сегментирование данных координат и данных моментов времени, а также получение множества блоков кластерных данных, блок определения выполняет определение типа блоков кластерных данных для различения блоков кластерных данных, относящихся к нерабочему состоянию, и блок исполнения выполняет удаление блоков кластерных данных, относящихся к нерабочему состоянию, а также получение блоков кластерных рабочих данных.
19. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 18, отличающаяся тем, что в блоке кластеризации и сегментирования для кластеризации и сегментирования данных координат и данных моментов времени после очистки применяется алгоритм T-DBSCAN.
20. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 19, отличающаяся тем, что блок кластеризации и сегментирования выполняет коррекцию порогового значения времени, τ, радиуса плотности, r, и порогового значения плотности, ε, алгоритма T-DBSCAN.
21. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 20, отличающаяся тем, что блок определения выполняет определение типа блоков кластерных данных в соответствии с плотностью данных и правильностью времени, и блоками кластерных данных, относящихся к нерабочему состоянию, являются блоки кластерных данных с низкой плотностью данных и неправильным временем.
22. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 18, отличающаяся тем, что модуль генерирования полигонов содержит блок генерирования полигонов и блок контроля повторений, и блок контроля повторений соединен с блоком генерирования полигонов, блок генерирования полигонов соединен с блоком исполнения модуля кластеризации и сегментирования, блок генерирования полигонов получает граничные полигоны, соответствующие блокам кластерных рабочих данных в соответствии с данными координат и данными моментов времени блоков кластерных рабочих данных, и блок контроля повторений выполняет агрегирование граничных полигонов, а также удаление повторяющейся части площади граничных полигонов и генерирование множества полигонов без повторений.
23. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 22, отличающаяся тем, что в блоке генерирования полигонов для отыскания границы данных координат и данных моментов времени каждого из блоков кластерных рабочих данных с целью нахождения полигонов применяется алгоритм сканирования Грэма.
24. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 23, отличающаяся тем, что блок контроля повторений применяет алгоритм объединения буферных зон для агрегирования каждого из полигонов, выполняет удаление повторяющейся части площади полигонов и генерирует множество полигонов без повторений.
25. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 23, отличающаяся тем, что модуль вычисления площади содержит блок преобразования и блок вычисления, и блок преобразования соединен с блоком контроля повторений блока генерирования полигонов, и блок вычисления соединен с блоком преобразования, при этом блок преобразования выполняет проекционное преобразование координат по долготе и координат по широте вершин каждого полигона для получения кода EPSG проекции, и блок вычисления выполняет отыскание кода EPSG с помощью алгоритма наименьших квадратов с целью нахождения оптимальной системы координат проекции, а также преобразование координат по долготе и координат по широте вершин каждого полигона в двумерные координаты; и блок вычисления выполняет применение, на основе двумерных координат полигона, формулы  для вычисления площади полигонов, а также
для вычисления площади полигонов, а также
сложение площадей полигонов с целью получения площади, обработанной сельскохозяйственной машиной.
26. Система для определения площади, обработанной сельскохозяйственной машиной, по п. 25, отличающаяся тем, что дополнительно содержит:
устройство хранения данных, при этом в устройстве хранения данных хранятся данные координат, данные моментов времени и площадь, обработанная сельскохозяйственной машиной.
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКОЙ ПЛОЩАДИ ЗЕМЕЛЬНОГО УЧАСТКА | 2000 |
|
RU2166731C1 |
| RU 2005112995 A, 10.11.2006 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ РЕЛЬЕФА | 2004 |
|
RU2255357C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОЩАДИ РЕЛЬЕФА | 2004 |
|
RU2251075C1 |
| DE 199545704 A1, 12.06.1997 | |||
| US 5166878 A, 24.11.1992. | |||

