Область техники
Настоящее изобретение относится к технологии определения местоположения для поездов в длинных и больших тоннелях и конкретно к способу и системе для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров.
уровень техники
В последние годы, все больше железнодорожных линий прокладывают в западной области Китая. С изменениями в топографии, линии неминуемо пройдут через множество высокогорных областей, и сигналы навигационных спутников невозможно будет обнаружить в тоннелях, что будет вызывать временную потерю информации и создавать навигационные слепые зоны, ставя под угрозу безопасность движения. Точное определение местоположения поездов в тоннелях очень важно для обеспечения безопасности поездов.
В настоящее время, отечественные исследования в направлениях определения местоположения поезда в длинных и больших тоннелях (тоннелях с длиной одной шахты более 10 километров), которые являются типичными навигационными слепыми зонами, все еще находятся на предварительной стадии. Чтобы избежать слепых зон в определении местоположения и аварий при функционировании поездов, вызванных потерей сигнала, необходимо разработать устройства и способы определения местоположения, которые являются точными в определении местоположения, экономичными и простыми для реализации. Существующие способы определения местоположения поезда в тоннеле являются следующими:
Система симуляции навигационной информации в тоннеле получает информацию через симулятор спутникового сигнала, затем генерирует симулированную навигационную информацию и отправляет ее на целевой поезд посредством оптических кабелей, которые могут обеспечивать непрерывную навигационную и локационную симуляцию в тоннеле и достигают цели сокращения затрат и решения проблемы потери информации и временной прерывности в тоннеле. Однако требуется множество групп оптических кабелей, обязательными являются специальные условия для аппаратных средств, и требуется специальная конструкция для разных положений рельефа в реальных применениях, поэтому универсальность невысока.
Путевое устройство определения местоположения поезда получает изображения путевого оборудования во время работы поезда и реализует определение местоположения поезда посредством путевого умного устройства идентификации в комбинации с электронной картой. Точность идентификации повышается с повышением частоты кадров камеры, но путевое оборудование должно быть расположено вдоль железнодорожных линий, поэтому затраты на обслуживание высоки.
Кроме того, существуют технологии, такие как определение местоположения на основе вычисления измерения скорости и определение местоположения на основе ответа, которые также имеют проблемы низкой точности определения местоположения или высоких затрат на обслуживание. Из вышеизложенного следует, что существующие технологии для определения местоположения поездов в тоннелях являются сложными для распространения в большом регионе при обеспечении высокой точности определения местоположения.
Краткое описание сущности изобретения
Техническая проблема, подлежащая решению настоящим изобретением, состоит в обеспечении, с учетом недостатков в предшествующем уровне техники, способа и системы для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров, чтобы решить проблему, состоящую в сложности определения местоположения поезда в длинном и большом тоннеле, который является типичной навигационной слепой зоной, и уменьшить затраты на определение местоположения.
Чтобы решить вышеуказанную техническую проблему, техническое решение согласно настоящему изобретению состоит в следующем: способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров, включающий в себя следующие этапы:
S1, получение метеорологических параметров тоннеля в тоннеле, когда поезд проходит, чтобы создать базу данных метеорологических параметров тоннеля;
S2, классифицирование, на основе базы данных метеорологических параметров тоннеля, групп тоннелей с аналогичными атрибутами, чтобы получить типичные выборки тоннелей каждой категории групп тоннелей;
S3, создание библиотеки шаблонов цветового пространства HSV типичной последовательности путем использования типичных выборок тоннелей;
S4, обучение модели сопоставления шаблонов HSV при помощи библиотеки шаблонов цветового пространства HSV; обучение векторной машины релевантности при помощи данных той же самой категории групп тоннелей, чтобы установить модель предсказания пути в милях тоннеля;
S5, создание модели объединения модели сопоставления шаблонов HSV и модели предсказания пути в милях тоннеля, чтобы получить модель объединения предсказания пути в милях; и
S6, получение данных метеорологических параметров тоннеля во время функционирования поезда и вызов модели объединения предсказания пути в милях для предсказания положения поезда.
Настоящее изобретение устанавливает модель предсказания пути в милях посредством технологии анализа больших данных искусственного интеллекта. После завершения моделирования, требуются только бортовые датчики, чтобы получать входные данные без какого-либо путевого оборудования, поэтому затраты на создание и затраты на обслуживание системы уменьшаются.
На этапе S1, конкретный процесс создания базы данных метеорологических параметров тоннеля включает в себя: получение последовательности температуры и последовательности влажности, которые получают, когда поезд проходит через тоннель в одно время, долготы и широты области, где расположен тоннель, и предсказанных значений почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, чтобы образовать группу выборок метеорологических параметров тоннеля; причем выборки метеорологических параметров тоннеля, полученные во время функционирования всех поездов в области в пределах одного года, образуют базу данных метеорологических параметров тоннеля. Процесс создания базы данных настоящего изобретения может обеспечивать достаточные данные выборок для улучшения точности предсказания модели объединения предсказания.
Конкретный процесс реализации этапа S2 включает в себя:
a) преобразование координат широты и долготы области, где расположен тоннель, в координаты плоскости; нормализацию метеорологических параметров тоннеля, причем обработанные координаты широты и долготы и метеорологические параметры тоннеля формируют набор входных атрибутов грубой классификации на категории тоннелей;
b) выполнение упорядочивания вывода выборок групп тоннелей с входными атрибутами грубой классификации на категории тоннелей в качестве объектов посредством алгоритма OPTICS и сравнение расстояний достижимости выборок в последовательности после упорядочивания с установленным параметром ε расстояния окрестности, причем последовательные выборки, расстояния достижимости которых меньше, чем установленный параметр ε расстояния окрестности в последовательности, образуют кластер выборок; получение центра  кластера каждого кластера выборок и T1 выборок
кластера каждого кластера выборок и T1 выборок  ближайших к центру кластера; причем
ближайших к центру кластера; причем  соответствуют обработанной долготе и широте, и
соответствуют обработанной долготе и широте, и  соответствуют обработанным метеорологическим параметрам тоннеля; определение центра кластера и T1 выборок в качестве репрезентативных выборок текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках являются типичными выборками тоннеля текущей категории групп тоннелей.
соответствуют обработанным метеорологическим параметрам тоннеля; определение центра кластера и T1 выборок в качестве репрезентативных выборок текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках являются типичными выборками тоннеля текущей категории групп тоннелей.
Посредством вышеописанного процесса реализуется грубая классификация групп тоннелей с аналогичными атрибутами.
Конкретный процесс реализации этапа S2 включает в себя:
1) выполнение зеркального расширения на временной последовательности температуры и последовательности влажности, когда поезд проходит через тоннель, в кластере выборок, чтобы преобразовать последовательность температуры и последовательность влажности в кластере выборок в последовательности, длины которых равны соответственным длинам самых длинных выборок;
2) установку времени задержки и длины окна и выполнение реконструкции фазового пространства на последовательностях температуры и влажности с соответственными самыми длинными длинами выборок посредством способа координат задержки, чтобы получить двумерную матрицу реконструкции, представляющую характеристики развития температуры и влажности;
3) ввод двумерной матрицы реконструкции в обучающий автокодер, чтобы получить набор атрибутов признака глубины для дополнительной классификации; и
4) получение центра  кластера каждого кластера выборок вторичной кластеризации и Т1 выборок, ближайших к центру кластера, посредством набора атрибутов признака глубины в качестве входа в соответствии с процессом на этапе b); определение центра кластера и Т1 выборок в качестве репрезентативных выборок вторичной кластеризации текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках вторичной кластеризации являются типичными выборками тоннеля текущей категории групп тоннелей.
кластера каждого кластера выборок вторичной кластеризации и Т1 выборок, ближайших к центру кластера, посредством набора атрибутов признака глубины в качестве входа в соответствии с процессом на этапе b); определение центра кластера и Т1 выборок в качестве репрезентативных выборок вторичной кластеризации текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках вторичной кластеризации являются типичными выборками тоннеля текущей категории групп тоннелей.
Процесс реализации вышеописанного этапа S2 реализует точную классификацию групп тоннелей, которая может обеспечивать, что данные последующей библиотеки шаблонов цветового пространства HSV являются более точными, тем самым улучшая точность предсказания модели объединения предсказания.
На этапе S3, конкретный процесс реализации создания библиотеки шаблонов цветового пространства HSV типичной последовательности путем использования типичных выборок тоннеля включает в себя: использование последовательностей параметров температуры и влажности, которые находятся в типичных выборках и варьируются в зависимости от пути в милях тоннеля, как шаблонов последовательности соответствующей категории групп тоннелей, установку времени задержки и длины окна, выполнение реконструкции фазового пространства на временных последовательностях температуры, влажности и разности температур посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и комбинирование трех двумерных матриц реконструкции в соответствии с цветовым пространством HSV, чтобы сформировать цветное изображение, то есть, получают изображение шаблона в библиотеке шаблонов цветового пространства HSV типичной последовательности. Эта реализация создает двумерные матрицы реконструкции посредством температуры, влажности и разности температур, поэтому процесс вычисления прост.
На этапе S4, конкретный процесс реализации обучающей модели сопоставления шаблонов HSV включает в себя:
1) сбор точек текущей выборки во временных последовательностях температуры, влажности и разности температур и N точек выборок перед точками текущей выборки;
2) установку времени задержки и длины окна, выполнение реконструкции фазового пространства посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и комбинирование трех матриц в соответствии с цветовым пространством HSV, чтобы сформировать изображение признака текущего положения;
3) выполнение операции свертки на изображении признака текущего положения и изображении шаблона в библиотеке шаблонов цветового пространства HSV типичной последовательности, чтобы получить множество одномерных последовательностей;
4) сортировку элементов во всех одномерных последовательностях в убывающем порядке, чтобы определить T2 наибольших элементов в качестве элементов-кандидатов, причем положения, соответствующие элементам-кандидатам до сортировки, являются положениями-кандидатами; получение значений пути в милях, соответствующих положениям-кандидатам; и
5) усреднение всех значений пути в милях, соответствующих всем положениям-кандидатам, чтобы получить текущую выходную последовательность модели сопоставления шаблонов HSV.
С помощью вышеописанного процесса можно определить положение наилучшего совпадения для текущего положения поезда в библиотеке шаблонов, и можно дополнительно улучшить точность предсказания.
На этапе S4, конкретный процесс реализации обучения векторной машины релевантности, чтобы установить модель предсказания пути в милях тоннеля, включает в себя:
1) определение входных выборок  причем
причем  является временной последовательностью температуры точки текущей выборки, и предыдущих M точек выборок в тоннеле,
является временной последовательностью температуры точки текущей выборки, и предыдущих M точек выборок в тоннеле,  является последовательностью влажности точки текущей выборки и предыдущих N точек выборок в тоннеле, и t0, h0 и r0 являются соответственно предсказанными значениями почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, полученных от метеорологической станции; определение выходной выборки как значения O пути в милях, соответствующего текущему положению, причем комбинации
является последовательностью влажности точки текущей выборки и предыдущих N точек выборок в тоннеле, и t0, h0 и r0 являются соответственно предсказанными значениями почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, полученных от метеорологической станции; определение выходной выборки как значения O пути в милях, соответствующего текущему положению, причем комбинации  входа и выхода составляют выборки моделирования; выбор M выборок моделирования для каждой группы тоннелей одной и той же категории;
входа и выхода составляют выборки моделирования; выбор M выборок моделирования для каждой группы тоннелей одной и той же категории;
2) разделение случайным образом M выборок моделирования на обучающий набор, набор верификации и тестовый набор;
3) выполнение двоичного кодирования на признаке каждой размерности во входных выборках I; когда кодовое значение, соответствующее признаку определенной размерности, равно 1, выбор признака в качестве входной переменной модели RVM; когда кодовое значение признака определенной размерности равно 0, отбрасывание признака этой размерности;
4) определение новых входных признаков на основе кодовых значений текущих признаков, обновление обучающего набора, набора верификации и тестового набора, обучение модели RVM при помощи данных обновленного обучающего набора, и ввод данных обновленного набора верификации в обученную модель RVM, чтобы получить выходную последовательность  причем M1=0,3M; и
причем M1=0,3M; и
5) повторение этапа 3) и этапа 4), чтобы определить оптимальные входные признаки и модель RVM, которая минимизирует целевую функцию  оптимизации, причем модель RVM является моделью предсказания пути в милях тоннеля; причем
оптимизации, причем модель RVM является моделью предсказания пути в милях тоннеля; причем  является действительным выходным значением в наборе верификации.
является действительным выходным значением в наборе верификации.
Векторная машина релевантности (RVM) используется, чтобы получать модель предсказания пути в милях тоннеля, которая может улучшить точность предсказания модели предсказания пути в милях тоннеля.
Модель объединения модели сопоставления шаблонов HSV и модели предсказания пути в милях тоннеля представляет собой  причем k1=1,2…M2, M2=0,1M;
причем k1=1,2…M2, M2=0,1M; 
 является выходной последовательностью, полученной после того, как данные тестового набора введены в модель предсказания пути в милях тоннеля;
является выходной последовательностью, полученной после того, как данные тестового набора введены в модель предсказания пути в милях тоннеля;  является реальным выходным результатом в тестовом наборе; и
является реальным выходным результатом в тестовом наборе; и  является выходной последовательностью, полученной после того, как тестовый набор введен в модель сопоставления шаблонов HSV.
является выходной последовательностью, полученной после того, как тестовый набор введен в модель сопоставления шаблонов HSV.
На этапе S6, конкретный процесс реализации предсказания положения поезда включает в себя: вычисление входных векторов модели RVM точек текущей выборки и подстановку входных векторов модели RVM в целевую модель, чтобы получить выходное значение модели предсказания пути в милях тоннеля; получение входных значений модели сопоставления шаблонов HSV точек текущей выборки и подстановку ее в модель сопоставления шаблонов HSV, чтобы получить выходное значение модели сопоставления шаблонов HSV; подстановку выходного значения модели предсказания пути в милях тоннеля и выходного значения модели сопоставления шаблонов HSV в модель объединения предсказания пути в милях тоннеля, чтобы получить окончательный результат предсказания положения поезда; причем целевой шаблон относится к модели, обученной при целевом кластере выборок вторичной кластеризации; целевой кластер выборок вторичной кластеризации относится к кластеру выборок, соответствующему минимальному значению между точкой текущей выборки и репрезентативными выборками вторичной кластеризации, подчиненному всем кластерам выборок первичной кластеризации; целевые кластеры выборок первичной кластеризации относятся к кластерам выборок, соответствующим минимальному значению между точкой текущей выборки и всеми репрезентативными выборками кластеризации; репрезентативные выборки кластеризации относятся к выборкам в кластере выборок, и кластер выборок относится к кластеру выборок, состоящему из последовательных выборок в последовательности, полученной путем выполнения упорядочивания вывода выборок групп тоннелей с входными атрибутами грубой классификации на категории тоннелей как объектов и посредством алгоритма OPTICS, значение выборки в последовательных выборках, которая находится между расстоянием достижимости и установленным параметром ɛ расстояния окрестности, меньше, чем параметр ε расстояния окрестности.
Соответственно, настоящее изобретение дополнительно обеспечивает систему для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров, включающую в себя датчики, установленные на поезде, для получения метеорологических параметров в тоннеле; причем датчики осуществляют связь с компьютерным оборудованием; и компьютерное оборудование запрограммировано или сконфигурировано, чтобы выполнять этапы способа в соответствии с настоящим изобретением.
По сравнению с предшествующим уровнем техники, настоящее изобретение имеет следующие полезные результаты:
1. Настоящее изобретение полностью использует технологию анализа больших данных искусственного интеллекта, в полной мере исследует потенциальные закономерности изменений параметров среды тоннеля в зависимости от глубины тоннеля и решает проблему сложности в определении местоположения поезда в длинном и большом тоннеле, который является типичной навигационной слепой зоной, с точки зрения моделирования на основе данных;
2. После завершения моделирования, настоящее изобретение требует только использования бортовых датчиков температуры и влажности, чтобы получать входные данные без какого-либо путевого оборудования, тем самым уменьшая затраты на создание системы и затраты на обслуживание.
Краткое описание чертежей
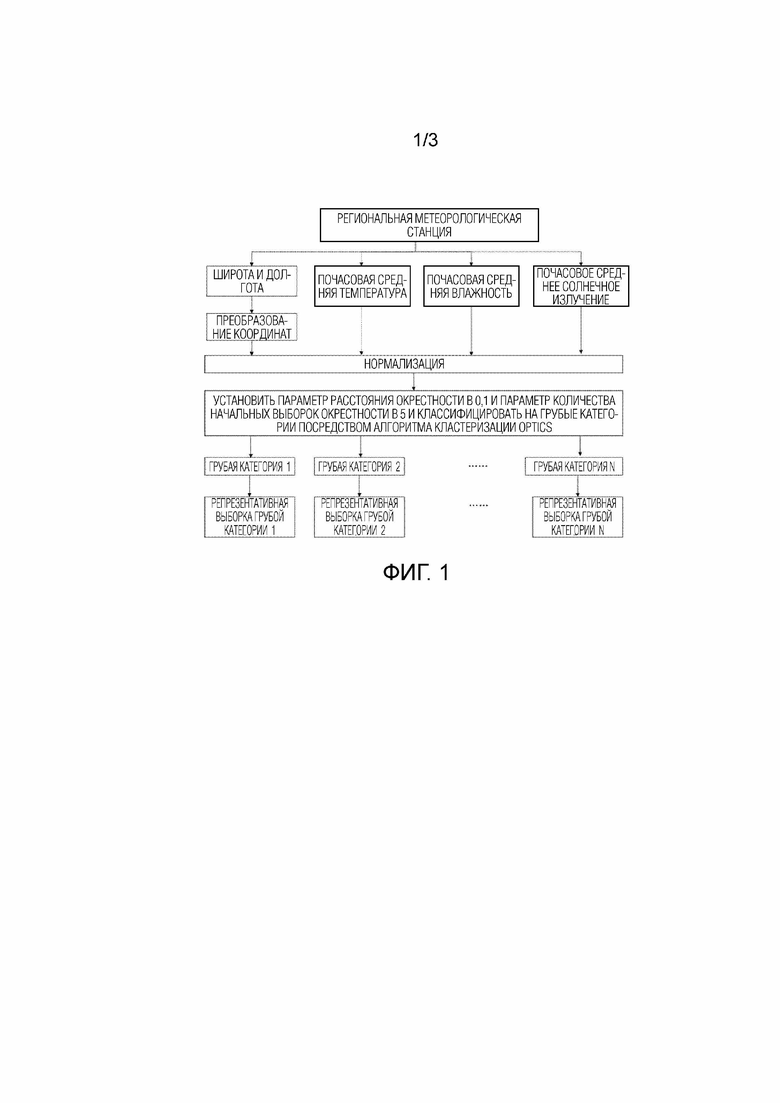
Фиг. 1 является блок-схемой последовательности операций получения данных и грубой классификации на категории;
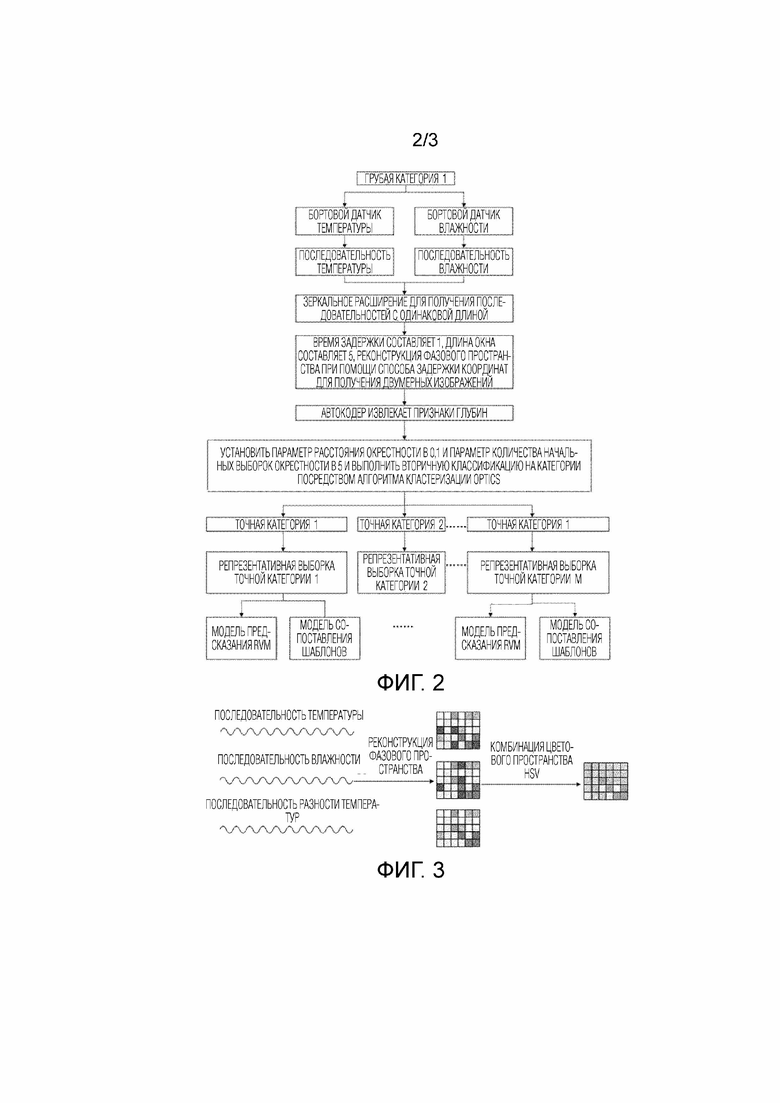
Фиг. 2 является блок-схемой последовательности операций вторичной классификации на категории и моделирования;
Фиг. 3 показывает комбинацию временной последовательности, реконструкции фазового пространства и цветового пространства HSV;
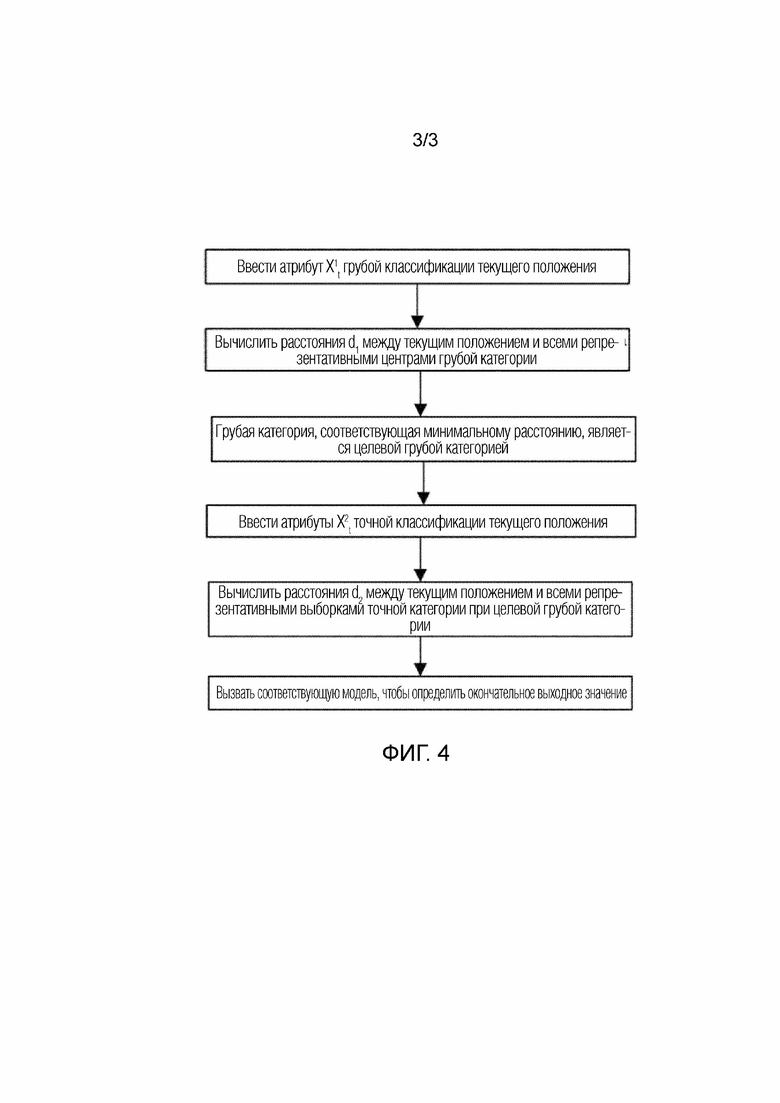
Фиг. 4 является блок-схемой последовательности операций вызова модели во время тестирования.
Подробное описание вариантов осуществления
Вариант осуществления 1 настоящего изобретения обеспечивает способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне, который, в частности, включает в себя следующие этапы:
Этап 1: получение метеорологических параметров тоннеля и создание базы данных метеорологических параметров тоннеля
Временные последовательности температуры, влажности и пути в милях в тоннеле, когда поезд проходит, получают в реальном времени посредством бортовых датчиков с интервалом дискретизации 0,1 с. Широту и долготу текущего положения и предсказанные значения почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения получают от метеорологической станции в области, где расположен тоннель. Последовательность температуры и последовательность влажности, полученные, когда поезд проходит через тоннель в одно время, широта и долгота области и предсказанные значения почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения составляют группу выборок метеорологических параметров тоннеля. Выборки метеорологических параметров тоннеля, полученные во время функционирования всех поездов в области в течение одного года, составляют базу данных метеорологических параметров тоннеля.
Этап 2: мульти-масштабная иерархическая классификация метеорологических параметров тоннеля
На основе базы данных метеорологических параметров тоннеля, классификация на категории множества типов атрибутов, множества масштабов признаков и множества уровней выполняется с использованием последовательности температуры и последовательности влажности, полученных при прохождении через тоннель, широты и долготы области и предсказанных значений почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения (соответственно соответствующих почасовой средней температуре, почасовой средней влажности и почасовому среднему солнечному излучению, то есть почасовых средних значений) в качестве входной информации, чтобы реализовать классификацию групп тоннелей со сходными атрибутами. Как показано на фиг. 2 и фиг. 3, конкретный процесс реализации заключается в следующем:
Этап A1: координаты широты и долготы преобразуются в координаты плоскости посредством отношения конверсии сферических координат. Преобразованные долгота и широта, почасовая средняя температура, почасовая средняя влажность и почасовое среднее солнечное излучение нормализуются, чтобы сформировать набор входных атрибутов грубой классификации на категории тоннелей.
Этап A2: исходный параметр ɛ расстояния окрестности устанавливается в 0,1, исходный параметр MinPts количества соседних выборок устанавливается в 5, и упорядочивание вывода выборок групп тоннелей выполняется с входными атрибутами грубой классификации на категории тоннелей в качестве объектов посредством алгоритма OPTICS (упорядочивание точек, чтобы идентифицировать структуру кластеризации). Расстояния достижимости (расстояние достижимости, понятие, определяемое алгоритмом OPTIC, является минимальным значением из расстояния до ядра и евклидова расстояния, см. https://blog.csdn.net/han1202012/article/details/105936710) выборок в последовательности сравниваются с установленным параметром ε расстояния окрестности, и последовательные выборки, расстояния достижимости которых меньше, чем установленное значение в последовательности, образуют кластер выборок. Получают центр кластера каждого кластера выборок и 5 выборок  , ближайших к центру кластера.
, ближайших к центру кластера.  соответствует пяти атрибутам, включая преобразованные долготу, широту, почасовую среднюю температуру, почасовую среднюю влажность и почасовое среднее солнечное излучение. Центр кластера и 5 выборок определяются как репрезентативные выборки текущей категории.
соответствует пяти атрибутам, включая преобразованные долготу, широту, почасовую среднюю температуру, почасовую среднюю влажность и почасовое среднее солнечное излучение. Центр кластера и 5 выборок определяются как репрезентативные выборки текущей категории.
Этап A3: каждый кластер выборок, полученный на основе набора входных атрибутов грубой классификации на категории тоннелей, дополнительно классифицируется. Конкретно, этап A3 включает в себя следующие подэтапы: ① Зеркальное расширение выполняется на временной последовательности температуры и последовательности влажности, когда поезд проходит через тоннель, в кластере выборок, чтобы преобразовать последовательность температуры и последовательность влажности в кластере выборок в последовательности, длины которых равны соответственным самым длинным длинам выборок. ② Время задержки установлено в 1, длина окна установлена в 5, и реконструкция фазового пространства выполняется на последовательности температуры и последовательности влажности посредством способа координат задержки, чтобы получить двумерную матрицу реконструкции, представляющую характеристики развития температуры и влажности. ③ Матрица реконструкции выборок вводится в обучающий автокодер, чтобы получить набор атрибутов признака глубины для дополнительной классификации. ④ Центр кластера каждого кластера выборок вторичной кластеризации и 5 выборок  , ближайших к центру кластера, получают при помощи набора атрибутов признака глубины в качестве входа в соответствии с процессом на этапе A2.
, ближайших к центру кластера, получают при помощи набора атрибутов признака глубины в качестве входа в соответствии с процессом на этапе A2.  соответствует 5 размерным переменным в наборе атрибутов признака глубины. Центр кластера и 5 выборок
соответствует 5 размерным переменным в наборе атрибутов признака глубины. Центр кластера и 5 выборок  определяются как репрезентативные выборки вторичной кластеризации текущей категории.
определяются как репрезентативные выборки вторичной кластеризации текущей категории.
Этап 3: создание библиотеки шаблонов цветового пространства HSV (цветовой тон, насыщенность, значение) типичной последовательности
5 выборок  тоннеля, ближайших к центру кластера, соответствующих группе в каждой категории групп тоннелей, используются как типичные выборки тоннеля в этой категории. Как показано на фиг. 3, последовательности параметров температуры и влажности, варьирующиеся в зависимости от пути в милях тоннеля в типичных выборках, используются как последовательности шаблона этой категории, время задержки установлено в 1, длина окна составляет 5, реконструкция фазового пространства выполняется на временных последовательностях температуры, влажности и разности температур посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и три матрицы комбинируются в соответствии с цветовым пространством HSV, чтобы сформировать цветное изображение, то есть, изображение шаблона fi, i=1,2…5.
тоннеля, ближайших к центру кластера, соответствующих группе в каждой категории групп тоннелей, используются как типичные выборки тоннеля в этой категории. Как показано на фиг. 3, последовательности параметров температуры и влажности, варьирующиеся в зависимости от пути в милях тоннеля в типичных выборках, используются как последовательности шаблона этой категории, время задержки установлено в 1, длина окна составляет 5, реконструкция фазового пространства выполняется на временных последовательностях температуры, влажности и разности температур посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и три матрицы комбинируются в соответствии с цветовым пространством HSV, чтобы сформировать цветное изображение, то есть, изображение шаблона fi, i=1,2…5.
Этап 4: обучение модели сопоставления шаблонов HSV
На основе точки выборки текущего положения и последовательностей предыдущих выборок, выполняются реконструкция фазового пространства и комбинация цветового пространства HSV, чтобы создать изображение признака текущего положения. Корреляции между модулем признака текущего положения и изображениями в библиотеке шаблонов вычисляются, чтобы определить положение наилучшего совпадения для текущего положения в библиотеке шаблонов. Этот процесс включает в себя следующие этапы:
Этап B1: выполняется сбор точки текущей выборки и точек предыдущих 19 выборок во временных последовательностях температуры, влажности и разности температур.
Этап B2: время задержки установлено в 1, длина окна установлена в 5, реконструкция фазового пространства выполняется посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и три матрицы комбинируются в соответствии с цветовым пространством HSV, чтобы сформировать изображение признака текущего положения h.
Этап B3: операция свертки  выполняется на изображении признака текущего положения и изображениях в библиотеке шаблонов, причем каждое gi является одномерной последовательностью.
выполняется на изображении признака текущего положения и изображениях в библиотеке шаблонов, причем каждое gi является одномерной последовательностью.
Этап B4: элементы во всех последовательностях gi сортируются в убывающем порядке, чтобы определить 5 наибольших элементов в качестве элементов-кандидатов, причем положения, соответствующие элементам-кандидатам до сортировки, являются положениями-кандидатами, и значениями пути в милях, соответствующими положениям-кандидатам, являются lj, j=1,2,…5.
Этап B5: среднее значение значений пути в милях, соответствующих положениям-кандидатам, определяется как текущее выходное значение модели сопоставления шаблонов, то есть, выходным значением модели сопоставления шаблонов является 
Этап 5: обучение модели распознавания RVM
Векторную машину релевантности (RVM) обучают при помощи данных одной и той же категории групп тоннелей, последовательности температуры, последовательности влажности, почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения в качестве входа и данных пути в милях в текущем тоннеле в качестве выхода, чтобы установить модель предсказания пути в милях тоннеля. Этот процесс включает в себя следующие этапы:
Этап C1: определяют обучающие выборки, и определяют входные выборки  причем
причем  является временной последовательностью температуры точки текущей выборки и предыдущих 19 точек выборок в тоннеле,
является временной последовательностью температуры точки текущей выборки и предыдущих 19 точек выборок в тоннеле,  является последовательностью влажности точки текущей выборки и предыдущих 19 точек выборок в тоннеле, и t0, h0 и r0 являются соответственно предсказанными значениями почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, полученных от метеорологической станции. Выходная выборка является значением O пути в милях, соответствующим текущему положению. Комбинации
является последовательностью влажности точки текущей выборки и предыдущих 19 точек выборок в тоннеле, и t0, h0 и r0 являются соответственно предсказанными значениями почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, полученных от метеорологической станции. Выходная выборка является значением O пути в милях, соответствующим текущему положению. Комбинации  входа и выхода образуют выборки моделирования. Для каждой группы тоннелей одной и той же категории, образованной вторичной кластеризацией, выбираются M (M составляет 5000 в настоящем изобретении) выборок, чтобы установить модель предсказания пути в милях тоннеля.
входа и выхода образуют выборки моделирования. Для каждой группы тоннелей одной и той же категории, образованной вторичной кластеризацией, выбираются M (M составляет 5000 в настоящем изобретении) выборок, чтобы установить модель предсказания пути в милях тоннеля.
Этап C2: классифицируют обучающие выборки, выборки верификации и тестовые выборки. Посредством дискретизации случайным образом без замещения, 60% M выборок выбираются, чтобы сформировать обучающий набор, 30% M выборок выбираются, чтобы сформировать набор верификации, и 10% M выборок выбираются, чтобы сформировать тестовый набор.
Этап C3: определяют оптимизированные объекты, и инициализируют оптимизированные значения. Входные признаки модели оптимизируются посредством двоичного “алгоритма кита” (whale algorithm), то есть, двоичное кодирование выполняется на признаке каждой размерности во входных выборках I. Когда кодовое значение, соответствующее признаку определенной размерности, равно 1, признак выбирается как входная переменная модели RVM. Когда кодовое значение, соответствующее признаку определенной размерности, равно 0, признак этой размерности отбрасывается. 43 размерных признака случайным образом инициализируются и кодируются как 0 или 1.
Этап C4: определяется целевая функция оптимизации. Входные признаки определяются на основе кодовых значений текущих признаков, и модель RVM обучается при помощи данных обучающего набора. Данные набора верификации вводятся в обученную модель RVM, чтобы получить выходную последовательность  модели, причем M1=0,3M. Целевая функция оптимизации определяется как:
модели, причем M1=0,3M. Целевая функция оптимизации определяется как:

В формуле  является реальным выходным значением набора верификации.
является реальным выходным значением набора верификации.
Этап C5: выводится оптимизированная модель предсказания. Повторные операции оптимизации выполняются посредством двоичного “алгоритма кита”, чтобы определить оптимальные входные признаки, и модели RVM, причем модель RVM является моделью RVM предсказания пути в милях тоннеля.
Этап 6: создание модели объединения сопоставления шаблона HSV и распознавания RVM
Данные тестового набора подставляют в модель RVM предсказания пути в милях тоннеля, чтобы получить выходную последовательность модели как  причем M2=0,1M. Беря данные тестового набора в качестве входа, в соответствии с операционным процессом на этапе 4, выходным результатом полученной модели сопоставления шаблонов является
причем M2=0,1M. Беря данные тестового набора в качестве входа, в соответствии с операционным процессом на этапе 4, выходным результатом полученной модели сопоставления шаблонов является  в то время как реальным выходным результатом в данных тестового набора является
в то время как реальным выходным результатом в данных тестового набора является  Ошибка между выходным значением модели RVM и реальным значением вычисляется следующим образом:
Ошибка между выходным значением модели RVM и реальным значением вычисляется следующим образом:

Ошибка между выходным результатом модели сопоставления шаблонов и реальным значением вычисляется следующим образом:

Одновременно вычисляются расстояния между одной или более текущими выборками шаблона и текущими выборками. Затем, коэффициент объединения модели для модели RVM определяется как:

Коэффициент объединения модели для модели сопоставления шаблонов определяется как:

Окончательный выходной результат модели является следующим:

Этап 7: получение входных данных и вызов модели объединения предсказания пути в милях тоннеля
Во время функционирования поезда, данные текущей температуры, атмосферного давления и солнечного излучения вне тоннеля получают от метеорологической станции в области. Текущие последовательности температуры и влажности получают посредством датчиков температуры и влажности, установленных в голове и хвосте поезда. Этот процесс включает в себя следующие этапы:
Этап D1: входные атрибуты  для первичной кластеризации получают со ссылкой на процесс этапа 2, причем
для первичной кластеризации получают со ссылкой на процесс этапа 2, причем  соответствует 5 атрибутам, включая преобразованные долготу, широту, почасовую среднюю температуру, почасовую среднюю влажность и почасовое среднее солнечное излучение. Входные атрибуты
соответствует 5 атрибутам, включая преобразованные долготу, широту, почасовую среднюю температуру, почасовую среднюю влажность и почасовое среднее солнечное излучение. Входные атрибуты  для вторичной кластеризации получают со ссылкой на процесс этапа 2, причем
для вторичной кластеризации получают со ссылкой на процесс этапа 2, причем  соответствует 5 атрибутам в наборе атрибутов признака глубины.
соответствует 5 атрибутам в наборе атрибутов признака глубины.
Этап D2: расстояния между значениями признаков точек текущей выборки и репрезентативными выборками первичной кластеризации вычисляются следующим образом:

Кластер выборок, соответствующий минимальному значению между точкой текущей выборки и всеми репрезентативными выборками кластеризации, выбирается как целевой кластер выборок первичной кластеризации.
Этап D3: расстояния между значениями признака точек текущей выборки и репрезентативными выборками вторичной кластеризации вычисляются следующим образом:

Кластер выборок, соответствующий минимальному значению между точкой текущей выборки и репрезентативными выборками вторичной кластеризации, подчиненный всем целевым кластерам выборок первичной кластеризации, выбирается как целевой кластер выборок вторичной кластеризации. Модель и библиотека шаблонов, обученные на этом кластере выборок, являются целевой моделью и целевой библиотекой шаблонов.
Этап 8: Предсказание положения поезда
Входные векторы модели RVM точек текущей выборки вычисляются со ссылкой на процесс этапа 5, входные векторы модели RVM подставляются в целевую модель, чтобы получить выходные значения целевой модели RVM. Входные значения модели сопоставления шаблонов точек текущей выборки получают со ссылкой на процесс этапа 4 и подставляют в целевую модель сопоставления шаблонов, чтобы получить выходное значение целевой модели сопоставления шаблонов. Окончательный результат предсказания положения поезда получают со ссылкой на уравнение 6.
Вариант осуществления 2 настоящего изобретения обеспечивает систему для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров, включающую в себя датчики, установленные на поезде для получения метеорологических параметров в тоннеле; датчики осуществляют связь с компьютерным оборудованием; и компьютерное оборудование запрограммировано или сконфигурировано, чтобы выполнять этапы способа в соответствии с вариантом осуществления 1 настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров | 2022 |
|
RU2804147C1 |
| СПОСОБ, СИСТЕМА И НОСИТЕЛЬ ХРАНЕНИЯ ДЛЯ ВЫЧИСЛЕНИЯ ДЛИТЕЛЬНОСТИ ПРОХОЖДЕНИЯ ПОЕЗДА ЧЕРЕЗ ТОННЕЛЬ | 2020 |
|
RU2773332C1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОДИРОВКИ ВИДЕО | 2024 |
|
RU2835389C1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОДИРОВКИ ВИДЕО | 2020 |
|
RU2824190C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КОДИРОВКИ ВИДЕО | 2020 |
|
RU2813135C1 |
| СПОСОБ ОБРАБОТКИ ДАННЫХ ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2486473C2 |
| ВЫВЕДЕНИЕ ВЕКТОРА ДВИЖЕНИЯ ПРИ ВИДЕОКОДИРОВАНИИ | 2016 |
|
RU2742298C2 |
| ВЫВОД ИНФОРМАЦИИ ДВИЖЕНИЯ ДЛЯ ПОДБЛОКОВ ПРИ ВИДЕОКОДИРОВАНИИ | 2016 |
|
RU2705428C2 |
| ОПРЕДЕЛЕНИЕ РЕЖИМА ВЫВОДА ИНФОРМАЦИИ ДВИЖЕНИЯ ПРИ ВИДЕОКОДИРОВАНИИ | 2016 |
|
RU2719296C2 |
| ИНТЕРПОЛЯЦИЯ ДЛЯ ВНЕШНЕГО ПРЕДСКАЗАНИЯ С УТОЧНЕНИЕМ | 2019 |
|
RU2808586C2 |
Изобретение относится к области вычислительной техники для определения местоположения поездов в тоннелях на основе метеорологических параметров. Технический результат заключается в повышении точности определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров. Для этого заявлен способ, содержащий: получение метеорологических параметров тоннеля; классификацию полученных метеорологических параметров тоннеля; создание библиотеки шаблонов цветового пространства HSV типичной последовательности путем использования классифицированных метеорологических параметров тоннеля; обучение библиотеки шаблонов цветового пространства HSV типичной последовательности; обучение модели сопоставления шаблонов HSV; обучение модели распознавания RVM; создание модели объединения модели сопоставления шаблонов HSV и модели распознавания RVM, чтобы получить модель объединения предсказания пути в милях тоннеля; получение входных данных и вызов модели объединения предсказания пути в милях тоннеля, чтобы предсказать положение поезда. 2 н. и 8 з.п. ф-лы, 4 ил.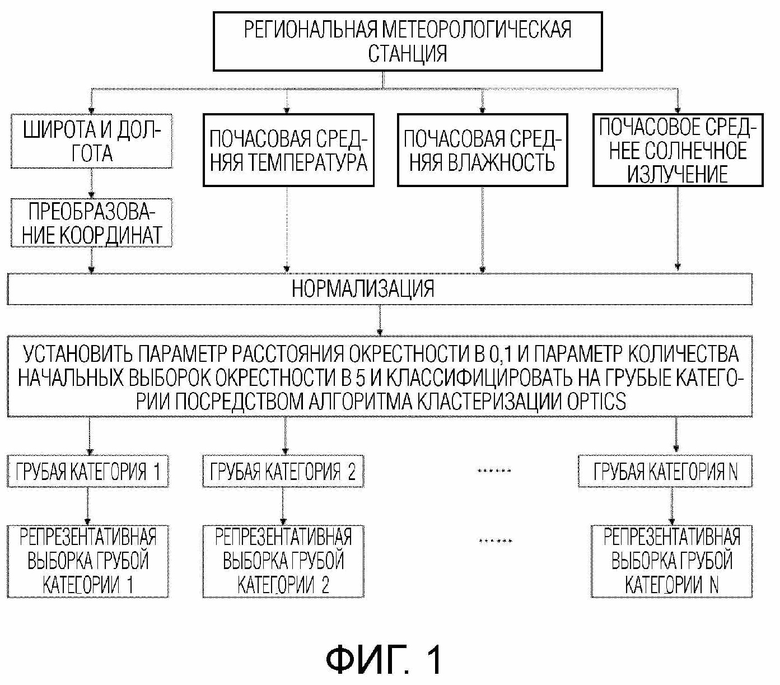
1. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров, содержащий следующие этапы:
S1, получение метеорологических параметров тоннеля в тоннелях, когда поезд проходит, чтобы создать базу данных метеорологических параметров тоннеля;
S2, классификация, на основе базы данных метеорологических параметров тоннеля, групп тоннелей с аналогичными атрибутами, чтобы получить типичные образцы тоннеля каждой категории групп тоннелей;
S3, создание библиотеки шаблонов цветового пространства HSV типичной последовательности путем использования типичных выборок тоннеля; обучение векторной машины релевантности при помощи данных той же самой категории групп тоннелей, чтобы установить модель предсказания пути в милях тоннеля;
S4, обучение модели сопоставления шаблонов HSV при помощи библиотеки шаблонов цветового пространства HSV;
S5, создание модели объединения модели сопоставления шаблонов HSV и модели предсказания пути в милях тоннеля, чтобы получить модель объединения предсказания пути в милях тоннеля; и
S6, получение данных метеорологических параметров тоннеля во время функционирования поезда и вывод модели объединения предсказания пути в милях тоннеля, чтобы предсказать положение поезда.
2. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по п. 1, в котором на этапе S1, конкретный процесс создания базы данных метеорологических параметров тоннеля содержит: получение последовательности температуры и последовательности влажности, которые получают, когда поезд проходит через тоннель в одно время, долготы и широты области, где расположен тоннель, и предсказанных значений почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, чтобы образовать группу выборок метеорологических параметров тоннеля; причем выборки метеорологических параметров тоннеля, полученные во время функционирования всех поездов в области в течение одного года, образуют базу данных метеорологических параметров тоннеля.
3. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по п. 1, в котором конкретный процесс реализации этапа S2 содержит:
a) преобразование координат широты и долготы области, где расположен тоннель, в координаты плоскости; нормализацию метеорологических параметров тоннеля, причем обработанные координаты широты и долготы и метеорологические параметры тоннеля формируют набор входных атрибутов грубой классификации на категории тоннелей;
b) выполнение упорядочивания вывода выборок групп тоннелей с входными атрибутами грубой классификации на категории тоннелей как объектов посредством алгоритма OPTICS и сравнение расстояний достижимости выборок в последовательности после упорядочивания с установленным параметром ε расстояния окрестности, причем последовательные выборки, расстояния достижимости которых меньше, чем установленный параметр ε расстояния окрестности в последовательности, образуют кластер выборок; получение центра  кластера каждого кластера выборок и T1 выборок
кластера каждого кластера выборок и T1 выборок  , ближайших к центру кластера; причем
, ближайших к центру кластера; причем  соответствуют обработанным долготе и широте, и
соответствуют обработанным долготе и широте, и  соответствуют обработанным метеорологическим параметрам тоннеля; определение центра кластера и T1 выборок как репрезентативных выборок текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках являются типичными выборками тоннеля текущей категории групп тоннелей.
соответствуют обработанным метеорологическим параметрам тоннеля; определение центра кластера и T1 выборок как репрезентативных выборок текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках являются типичными выборками тоннеля текущей категории групп тоннелей.
4. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по п. 3, в котором конкретный процесс реализации этапа S2 содержит:
1) выполнение зеркального расширения на временной последовательности температуры и последовательности влажности, когда поезд проходит через тоннель, в кластере выборок, чтобы преобразовать последовательность температуры и последовательность влажности в кластере выборок в последовательности, длины которых равны соответственным самым длинным длинам выборок;
2) установку времени задержки и длины окна и выполнение реконструкции фазового пространства на последовательностях температуры и влажности с соответственными самыми длинными длинами выборок посредством способа координат задержки, чтобы получить двумерную матрицу реконструкции, представляющую характеристики развития температуры и влажности;
3) ввод двумерной матрицы реконструкции в обучающий автокодер, чтобы получить набор атрибутов признака глубины для дополнительной классификации; и
4) получение центра  кластера каждого кластера выборок вторичной кластеризации и T1 выборок, ближайших к центру кластера, посредством набора атрибутов признака глубины в качестве входа в соответствии с процессом на этапе b); определение центра кластера и T1 выборок в качестве репрезентативных выборок вторичной кластеризации текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках вторичной кластеризации являются типичными выборками тоннеля текущей категории групп тоннелей.
кластера каждого кластера выборок вторичной кластеризации и T1 выборок, ближайших к центру кластера, посредством набора атрибутов признака глубины в качестве входа в соответствии с процессом на этапе b); определение центра кластера и T1 выборок в качестве репрезентативных выборок вторичной кластеризации текущей категории групп тоннелей, причем T1 выборок в репрезентативных выборках вторичной кластеризации являются типичными выборками тоннеля текущей категории групп тоннелей.
5. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по любому одному из пп. 1-4, в котором на этапе S3, конкретный процесс реализации создания библиотеки шаблонов цветового пространства HSV типичной последовательности путем использования типичных выборок тоннеля содержит: использование последовательностей параметров температуры и влажности, которые находятся в типичных выборках и варьируются в зависимости от пути в милях тоннеля, как последовательностей шаблонов соответствующей категории групп тоннелей, установку времени задержки и длины окна, выполнение реконструкции фазового пространства на временных последовательностях температуры, влажности и разности температур посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и комбинирование трех двумерных матриц реконструкции в соответствии с цветовым пространством HSV, чтобы сформировать цветное изображение, то есть получают изображение шаблона в библиотеке шаблонов цветового пространства HSV типичной последовательности.
6. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по любому одному из пп. 1-5, в котором на этапе S4, конкретный процесс реализации обучения модели сопоставления шаблонов HSV содержит:
1) сбор точек текущей выборки во временных последовательностях температуры, влажности и разности температур и N точек выборок перед точками текущей выборки;
2) установку времени задержки и длины окна, выполнение реконструкции фазового пространства посредством способа координат задержки, чтобы получить три двумерные матрицы реконструкции, представляющие характеристики развития температуры и влажности, и комбинирование трех матриц в соответствии с цветовым пространством HSV, чтобы сформировать изображение признака текущего положения;
3) выполнение операции свертки на изображении признака текущего положения и изображении шаблона в библиотеке шаблонов цветового пространства HSV типичной последовательности, чтобы получить множество одномерных последовательностей;
4) сортировку элементов во всех одномерных последовательностях в убывающем порядке, чтобы определить T2 наибольших элементов как элементы-кандидаты, причем положения, соответствующие элементам-кандидатам до сортировки, являются положениями-кандидатами; получение значений пути в милях, соответствующих положениям-кандидатам; и
5) усреднение всех значений пути в милях, соответствующих всем положениям-кандидатам, чтобы получить текущую выходную последовательность модели сопоставления шаблонов HSV.
7. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по любому одному из пп. 1-6, в котором на этапе S4 конкретный процесс реализации обучения векторной машины релевантности, чтобы установить модель предсказания пути в милях тоннеля, содержит:
1) определение входных выборок  , причем
, причем  является временной последовательностью температуры точки текущей выборки и предыдущих M точек выборок в тоннеле,
является временной последовательностью температуры точки текущей выборки и предыдущих M точек выборок в тоннеле,  является последовательностью влажности точки текущей выборки и предыдущих N точек выборок в тоннеле, и t0, h0 и r0 являются соответственно предсказанными значениями почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, полученных от метеорологической станции; определение выходной выборки как значения O пути в милях, соответствующего текущему положению, причем комбинации
является последовательностью влажности точки текущей выборки и предыдущих N точек выборок в тоннеле, и t0, h0 и r0 являются соответственно предсказанными значениями почасовой средней температуры, почасовой средней влажности и почасового среднего солнечного излучения, полученных от метеорологической станции; определение выходной выборки как значения O пути в милях, соответствующего текущему положению, причем комбинации  входа и выхода образуют выборки моделирования; выбор M выборок моделирования для каждой группы тоннелей одной и той же категории;
входа и выхода образуют выборки моделирования; выбор M выборок моделирования для каждой группы тоннелей одной и той же категории;
2) разделение случайным образом M выборок моделирования на обучающий набор, набор верификации и тестовый набор;
3) выполнение двоичного кодирования на признаке каждой размерности во входных выборках I; когда кодовое значение, соответствующее признаку определенной размерности, равно 1, выбор признака в качестве входной переменной модели RVM; когда кодовое значение признака определенной размерности равно 0, отбрасывание признака этой размерности;
4) определение новых входных признаков на основе кодовых значений текущих признаков, обновление обучающего набора, набора верификации и тестового набора, обучение модели RVM при помощи данных обновленного обучающего набора и ввод данных обновленного набора верификации в обученную модель RVM, чтобы получить выходную последовательность  модели; причем M1=0,3M; и
модели; причем M1=0,3M; и
5) повторение этапа 3) и этапа 4), чтобы определить оптимальные входные признаки и модель RVM, которая минимизирует целевую функцию оптимизации  , причем модель RVM является моделью предсказания пути в милях тоннеля; причем
, причем модель RVM является моделью предсказания пути в милях тоннеля; причем  является реальным выходным значением в наборе верификации.
является реальным выходным значением в наборе верификации.
8. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по п. 7, в котором модель объединения модели сопоставления шаблонов HSV и модели предсказания пути в милях тоннеля представляет собой  причем k1=1,2…M2, M2=0,1M;
причем k1=1,2…M2, M2=0,1M; 
 является выходной последовательностью, полученной после того, как данные тестового набора введены в модель предсказания пути в милях тоннеля;
является выходной последовательностью, полученной после того, как данные тестового набора введены в модель предсказания пути в милях тоннеля;  является реальным выходным результатом в тестовом наборе; и
является реальным выходным результатом в тестовом наборе; и  является выходной последовательностью, полученной после того, как тестовый набор введен в модель сопоставления шаблонов HSV.
является выходной последовательностью, полученной после того, как тестовый набор введен в модель сопоставления шаблонов HSV.
9. Способ для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров по любому одному из пп. 1-8, в котором на этапе S6, конкретный процесс реализации предсказания положения поезда содержит: вычисление входных векторов модели RVM точек текущей выборки и подстановку входных векторов модели RVM в целевую модель, чтобы получить выходное значение модели предсказания пути в милях тоннеля; получение входных значений модели сопоставления шаблонов HSV точек текущей выборки и подстановку ее в модель сопоставления шаблонов HSV, чтобы получить выходное значение модели сопоставления шаблонов HSV; подстановку выходного значения модели предсказания пути в милях тоннеля и выходного значения модели сопоставления шаблонов HSV в модель объединения предсказания пути в милях тоннеля, чтобы получить окончательный результат предсказания положения поезда; причем целевой шаблон относится к модели, обученной при целевом кластере выборок вторичной кластеризации; целевой кластер выборок вторичной кластеризации относится к кластеру выборок, соответствующему минимальному значению между точкой текущей выборки и репрезентативными выборками вторичной кластеризации, подчиненному целевым кластерам выборок первичной кластеризации; целевые кластеры выборок первичной кластеризации относятся к кластерам выборок, соответствующим минимальному значению между точкой текущей выборки и всеми репрезентативными выборками кластеризации; репрезентативные выборки кластеризации относятся к выборкам в кластере выборок, и кластер выборок относится к кластеру выборок, состоящему из последовательных выборок в последовательности, полученной путем выполнения упорядочивания вывода выборок групп тоннелей с входными атрибутами грубой классификации на категории тоннелей как объектов и посредством алгоритма OPTICS, значение выборки в последовательных выборках, которая находится между расстоянием достижимости и установленным параметром ε расстояния окрестности, меньше, чем параметр ε расстояния окрестности.
10. Система для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров, содержащая датчики, установленные на поезде для получения метеорологических параметров в тоннеле; причем датчики осуществляют связь с компьютерным оборудованием; и компьютерное оборудование запрограммировано или сконфигурировано, чтобы исполнять этапы способа по любому одному из пп. 1-9.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| CN 109828289 A, 31.05.2019 | |||
| JP 2018044843 A, 22.03.2018 | |||
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2002 |
|
RU2272731C2 |

