Многостепенной позиционер относится к космической технике, к магнитосодержащим средствам поддержки и рационализации предметно-орудийной деятельности космонавта в скафандре на орбитальной станции или поверхности Луны, а также в других условиях при востребованности его свойств и возможностей. Данное устройство предназначено для позиционирования приборов и других артефактов, обслуживаемых экипажем в процессе внекорабельной деятельности (ВКД).
Область применения постоянных магнитов охватывает многие отрасли промышленности: приборостроение, радиоэлектронику, связь, станкостроение и пр. Широко распространен класс магнитных фиксаторов.
Магнитным фиксатором принято называть устройство, в котором за счет использования статических магнитных сил ограничивается одна или более степеней свободы за исключением требуемой, например, свободы углового или линейного перемещения.
Магнитные фиксаторы применяются для закрепления в заданном положении инструментов или для временной фиксации узлов собираемой конструкции (Постоянные магниты // Под редакцией Ю.М. Пятина. Москва. «Энергия». 1980. С. 161-162). Частным случаем фиксаторов являются магнитные плиты станков. Магнитные фиксаторы используются в технологических позиционерах при сборке, испытаниях и ремонте аппаратуры, приборов, оружия, в экспериментальной науке, при фоторегистрации с большой выдержкой и др.
Магнитосодержащие системы могут применяться в особых случаях, например, в электронебезопасной высоковлажной среде, в вакууме, в условиях гипо- и микрогравитации, в запыленных и загазованных пространствах, при невозможности подвести электропитание, при ограниченных ресурсах в энергетике.
Принцип магнитной фиксации в различном конструктивном исполнении применяется в космической технике, в частности, в средствах поддержки и рационализации предметно-орудийной деятельности космонавта, облаченного в скафандр под избыточным давлением, на внешней поверхности орбитальной станции при установке, регулировке, техническом обслуживании, ремонте научной аппаратуры, указательных знаков, радиотехнического, антенного, осветительного и других видов оборудования.
Но установленные магнитные фиксаторы вместе с позиционируемыми артефактами неподвижны относительно базовых объектов в процессе полета или передвижения последних. При необходимости, изменение позиции артефакта относительно базового объекта можно выполнить следующими способами:
- произвести перемонтаж механических креплений фиксатора на другие посадочные места поверхности базового объекта силами экипажа в процессе ВКД;
- предусмотреть механизм поворота платформы с артефактом силами экипажа вручную в процессе ВКД;
- выполнить фиксатор в качестве позиционера с электромеханическим приводом и дистанционным проводным или радиоуправлением;
- применить фиксатор, содержащий кольцевой магнит со сферическим ярмом, которому присуща кинематическая возможность изменения позиции платформы с артефактом относительно базового объекта. (Н.И. Ситас, О.С.Цыганков. Магнит в невесомости // Полет 1. 2010. С. 30-35). Аналог.
Первые три из перечисленных способов связаны с увеличением массовой и энергетической нагрузки на системы базового объекта, с усложнением посадочного места фиксатора, с созданием сложных устройств для механической или электромеханической фиксации и репозиционирования артефакта.
Рассмотрим способы использования магнитного фиксатора со сферическим ярмом в качестве позиционера.
Диапазон изменения позиции платформы с артефактом определен допустимым углом 30±2° сближения между стойкой и плоской поверхностью магнита, зависящим от конструкции оправки кольцевого магнита.
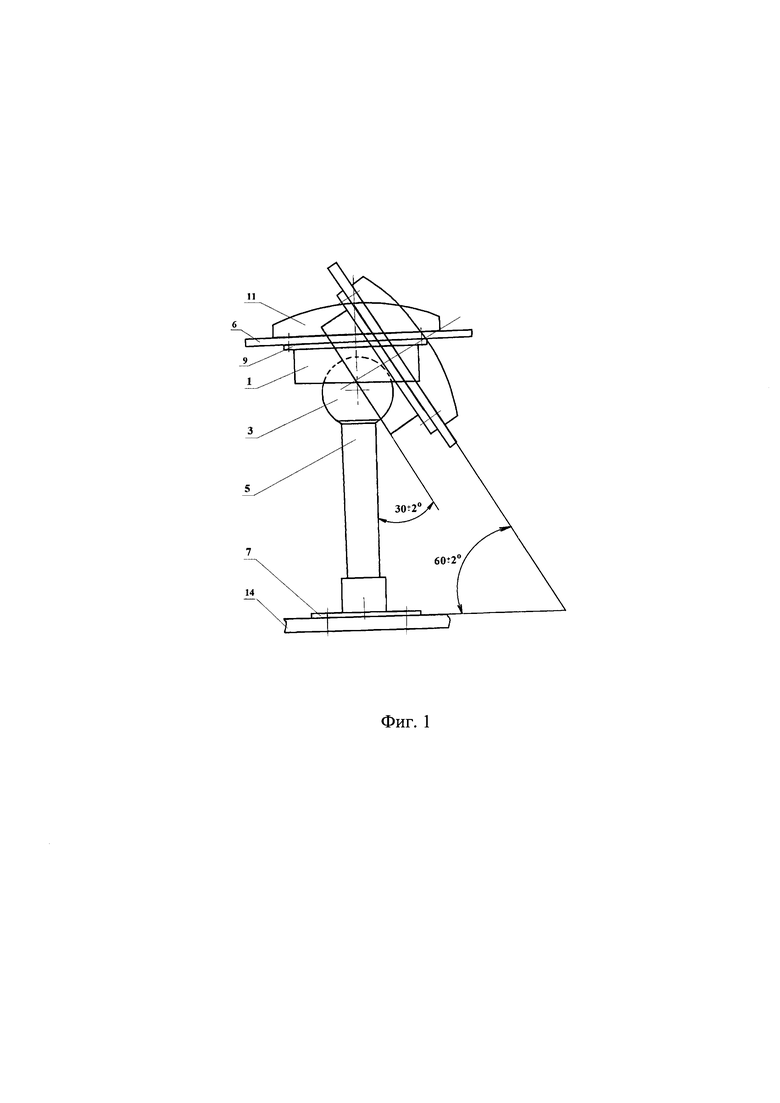
1. Исходное состояние (фиг. 1):
- стойка 5 с ярмом 3 закреплена стационарно и перпендикулярно поверхности базового объекта 14;
- кольцевой магнит 1, платформа 6 с артефактом 11 установлены на оконечности стойки 5 параллельно поверхности базового объекта 14.
При величине угла между стойкой 5 и плоской поверхностью магнита до 30±2° обеспечивается угол наклона платформы 6 с артефактом И к поверхности базового объекта 14 до 60±2°.
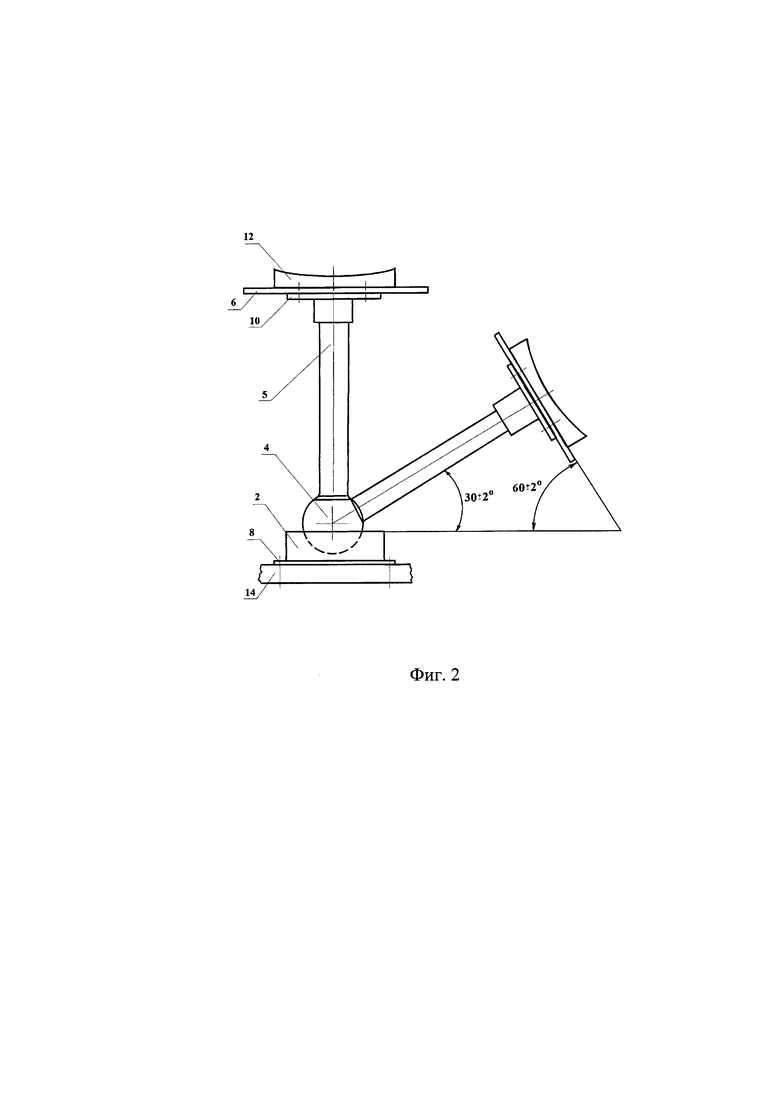
2. Исходное состояние (фиг. 2):
- кольцевой магнит 2 закреплен стационарно на поверхности базового объекта 14, стойка 5 перпендикулярна поверхности базового объекта 14;
- платформа 6 с артефактом 12 закреплена на оконечности стойки 5 стационарно и параллельно поверхности базового объекта 14.
При величине угла между стойкой 5 и плоской поверхностью магнита до 30±2° обеспечивается угол наклона платформы 6 с артефактом 12 к поверхности базового объекта 14 до 60±2°.
В процессе эксплуатации артефактов возникает технологическая необходимость и научная целесообразность выполнить наклон платформы с артефактом менее 60° или даже изменить положение платформы с артефактом в пространстве независимо от ориентации базового объекта, в противном случае для этого может потребоваться изменение ориентации самого базового объекта (например, орбитальной станции или налунного инфраструктурного объекта), что или физически невозможно, или такой маневр может быть реализован слишком высокой ценой отступления от эксплуатационных задач базового объекта, что категорически неприемлемо.
Задачей изобретения является создание многостепенного магнитосодержащего позиционера артефактов полезной нагрузки, эксплуатируемых космонавтом в скафандре на поверхности орбитальной станции или налунного объекта инфраструктуры.
Техническим результатом изобретения является обеспечение рациональной, эффективной, малоэнергозатратной деятельности космонавта в скафандре на поверхности орбитальной станции или налунного объекта инфраструктуры по многостепенному позиционированию артефактов полезной нагрузки в процессе их эксплуатации.
Технический результат достигается тем, что в многостепенном позиционере для использования космонавтом в скафандре, содержащем по крайней мере, по два кольцевых магнита и сферических ярма, сферические ярма закреплены на оконечностях соединяющей их стойки и контактно сопряжены с кольцевыми магнитами, образуя единую связанную структуру с двумя центрами вращения ярем в кольцевых магнитах, с возможностью произвольного позиционирования платформы полезной нагрузки в объеме полусферы в неограниченном количестве положений, при этом предусмотрены фланцы для крепления одного кольцевого магнита к базовому объекту и другого кольцевого магнита к платформе полезной нагрузки.
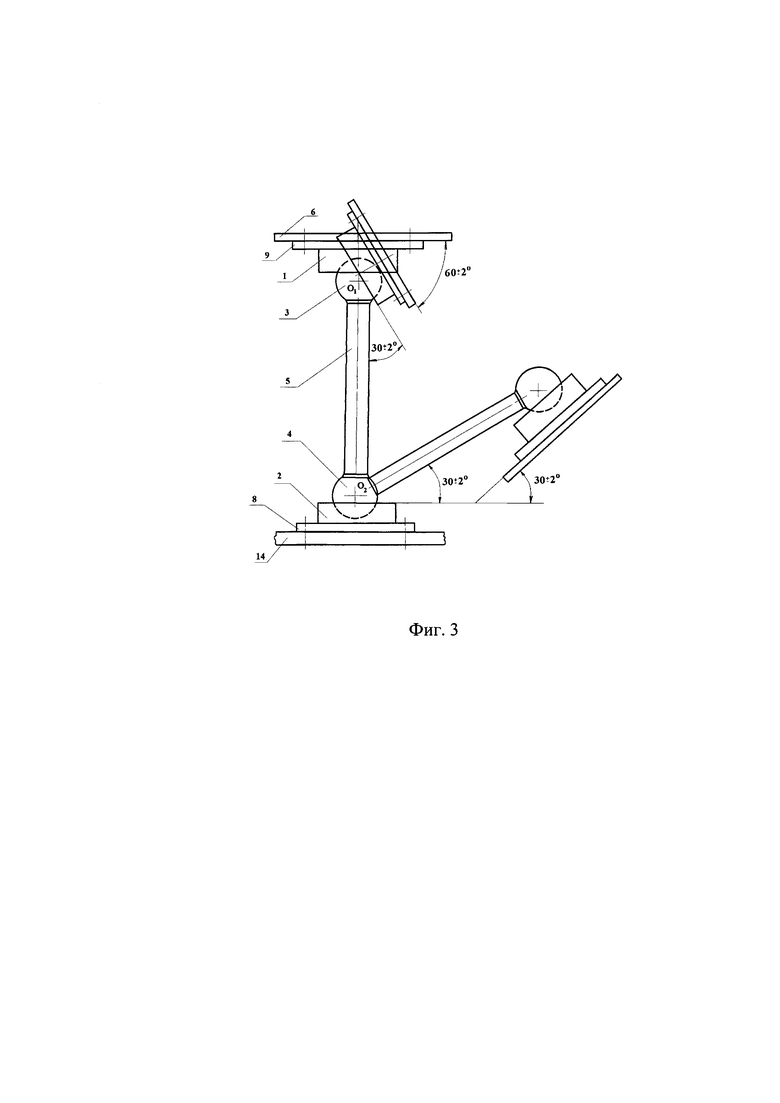
Способность связанной структуры приводить платформу в позицию с наклоном к поверхности базового объекта менее 60° реализуется следующими действиями (фиг. 3).
1. Вращение кольцевого магнита 1 вокруг центра O1 на 30±2° приводит к наклону его плоской поверхности к поверхности базового объекта 14 на угол 60±2°.
2. Вращение вокруг центра О2 стойки 5 с кольцевым магнитом 1 приводит к наклону плоской поверхности магнита 1 к поверхности базового объекта 14 на угол 30±2°, т.е. менее 60°.
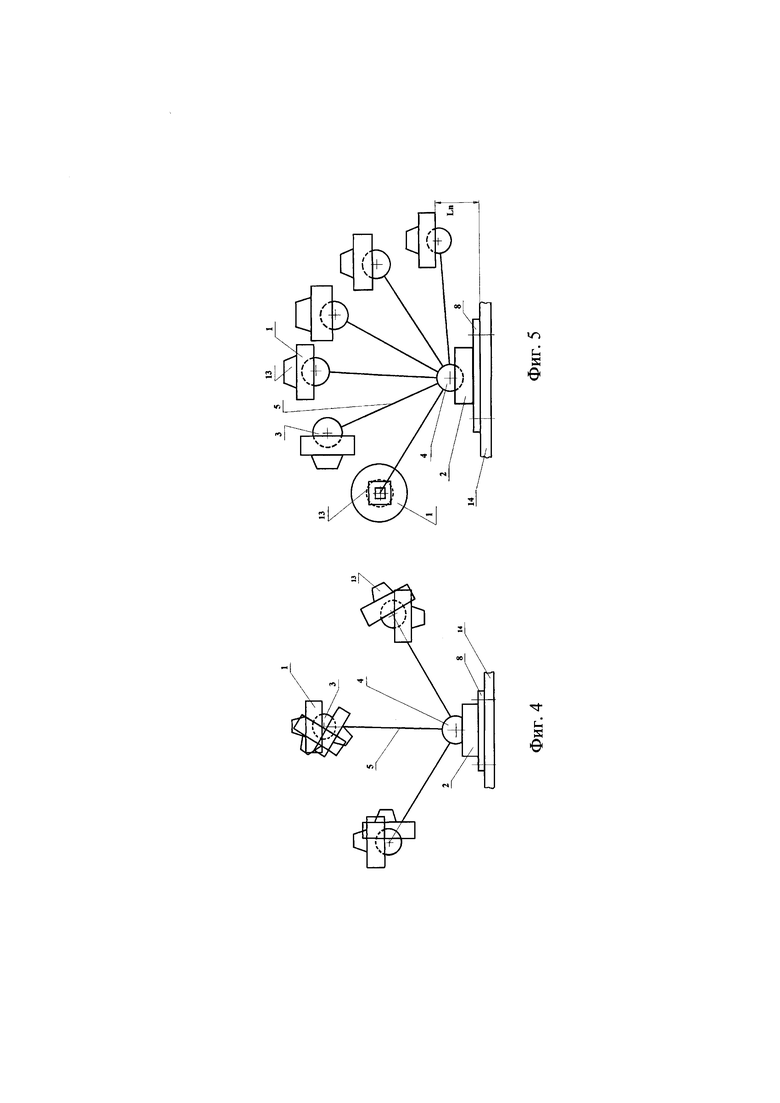
Учитывая факт вращения кольцевого магнита вокруг каждого из центров на 360° по азимуту, появляется возможность получать неограниченное количество положений артефакта (фиг. 4 и 5), включая возможность изменять расстояние Ln между артефактом и поверхностью базового объекта (фиг. 5).
На фигурах показано:
На фигуре 1 - стойка 5 закреплена на базовом объекте 14;
На фигуре 2 - кольцевой магнит 2 установлен на базовом объекте 14;
На фигуре 3 - структура позиционера;
На фигуре 4, 5 - многообразие возможных положений артефакта (11-13).
Принятые обозначения на фигурах:
1, 2 - кольцевой магнит;
3, 4 - сферическое ярмо;
5 - стойка;
6 - платформа полезной нагрузки;
7 - фланец крепления стойки 5 к базовому объекту 14 (фиг. 1);
8 - фланец крепления кольцевого магнита 2 к базовому объекту 14 (фиг. 2);
9 - фланец крепления кольцевого магнита 1 к платформе полезной нагрузки 6 (фиг. 1);
10 - фланец крепления стойки 5 к платформе полезной нагрузки 6 (фиг. 2);
11, 12, 13 - артефакт;
14 - базовый объект;
Ln - расстояние между артефактом (11-13) и поверхностью базового объекта 14.
Многостепенной позиционер для использования космонавтом в скафандре (фиг. 3) содержит, по крайней мере, по два кольцевых магнита 1, 2 (изготовлены, например из феррита кобальта (ГОСТ 2403-80) и по два сферических ярма 3, 4 (выполнены, например из стали 3 (ГОСТ 380-2005), закрепленных на оконечностях соединяющей их стойки 5 и контактно сопряженных с кольцевыми магнитами 1, 2, образуя единую связанную структуру (фиг. 3) с двумя центрами вращения O1, О2 ярем 3, 4 в кольцевых магнитах 1, 2, с возможностью произвольного позиционирования платформы полезной нагрузки 6 в объеме полусферы в неограниченном количестве положений, при этом предусмотрен фланец 8 для крепления магнита 2 к базовому объекту 14 и фланец 9 крепления магнита 1 к платформе полезной нагрузки 6.
Стойки 5, платформа полезной нагрузки 6, фланцы 8, 9 могут быть выполнены, например из алюминиево-магниевого сплава марки АМг-6 (ГОСТ 21488-97).
Использование многостепенного позиционера (фиг. 3) заключается в том, что магнит 2 с вертикальным положением стойки 5 закрепляют на поверхности базового объекта 14 по средством фланца 8, магнит 1 с параллельным положением платформы 6 относительно базового объекта 14 прикрепляют к платформе 6 через фланец 9, закрепляют на платформе 6 артефакт 11, 12 или 13 (фиг. 1, 2, 4, 5) затем взаимовращением вокруг центров O1 и O2 двух пар «магнит-ярмо» 1-3 и 2-4 приводят платформу 6 в заданную позицию.
Для варианта крепления стойки 5 к базовому объекту 14 (фиг. 1) применяется фланец 7.
Для варианта крепления платформы 6 стойки 5 используется фланец 10 (фиг. 2).
Наклоном магнита 1 на 30° относительно вертикальной стойки 5 приводят платформу полезной нагрузки 6 к наклону относительно базового объекта 14 до 60°. Затем наклоняют стойку 5 относительно базового объекта 14 до 30°, вращая магнит 1 вокруг ярма 3, приводят платформу полезной нагрузки 6 к наклону относительно базового объекта 14 до 30°. Взаимовращение магнита 1 и ярма 3 и взаимовращение ярма 2 со стойкой 5 по азимуту возможно на любой угол в диапазоне 360°.
В качестве базовых объектов 14 могут служить орбитальные станции, посещаемые и обслуживаемые аппараты-спутники, транспортные средства, например, луномобиль или инженерная луномашина, технологические объекты инфраструктуры на Луне и др.
В качестве артефактов 11-13 могут быть размещенные на платформе полезной нагрузки 6 приборы для фиксации тепловых, световых, корпускулярных, радиационных потоков с различных ракурсов, аппаратура для фоторегистрации с длительной выдержкой, экспонирования биообъектов, материалов, размещение инструментов в эргономически рациональном положении в процессе выполнения работ.
Многостепенной позиционер относится к инструментам и приспособлениям, используемым преимущественно во внекорабельной деятельности. Предлагаемый позиционер содержит две или более пар контактно сопряженных кольцевых магнитов и сферических ярм, причем последние закреплены на концах соединяющей их стойки, образуя единую связанную структуру с двумя центрами вращения ярм в кольцевых магнитах. Этим достигается возможность произвольного позиционирования платформы полезной нагрузки в объеме полусферы в неограниченном количестве положений. Один из кольцевых магнитов закреплен с помощью фланца на базовом объекте, а другой – аналогичным образом на платформе полезной нагрузки. Техническим результатом является повышение эффективности и эргономичности деятельности космонавта в скафандре, например, на поверхности орбитальной станции или на Луне. 5 ил.
Многостепенной позиционер для использования космонавтом в скафандре, содержащий по меньшей мере по два кольцевых магнита и сферических ярма, отличающийся тем, что сферические ярма закреплены на оконечностях соединяющей их стойки и контактно сопряжены с кольцевыми магнитами, образуя единую связанную структуру с двумя центрами вращения ярм в кольцевых магнитах, с возможностью произвольного позиционирования платформы полезной нагрузки в объеме полусферы в неограниченном количестве положений, при этом предусмотрены фланцы для крепления одного кольцевого магнита к базовому объекту, а другого - к платформе полезной нагрузки.
| Устройство для опоры, используемое преимущественно космонавтом в скафандре в реальных и моделируемых условиях гипогравитации на поверхности Луны и Марса | 2018 |
|
RU2708133C1 |
| 0 |
|
SU190233A1 | |
| Способ термической обработки линолеума, например глифталевого | 1960 |
|
SU143778A1 |
| US 4702453 A, 27.10.1987 | |||
| Бетвоуборочная машина | 1990 |
|
SU1692337A1 |

