ОБЛАСТЬ ТЕХНИКИ
Настоящее техническое решение относится к области обработки и интерпретации сейсмических данных для определения тектонических разломов.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известен источник информации RU 2 746 691 C1, опубликованный 19.04.2021 г., раскрывающий группу изобретений для интеллектуального определения тектонических нарушений по сейсмическим данным на основе сверточных нейронных сетей. Способ интеллектуального определения тектонических нарушений, включающий: получение куба измеренных сейсмических данных; деление куба измеренных сейсмических данных на подкубы измеренных сейсмических данных; подачу каждого подкуба измеренных сейсмических данных в сверточную нейронную сеть, при обучении которой выполнено не менее чем два цикла обучения, каждый из которых состоит не более чем из 100 эпох обучения, в каждом цикле скорость обучения (ηt) на текущей эпохе снижается от эпохи к эпохе от максимальной скорости обучения в цикле (ηmax) до минимальной скорости обучения в цикле (ηmin),при этом максимальная скорость обучения следующего цикла больше минимальной скорости обучения предыдущего цикла; получение подкубов прогноза разломов по каждому подкубу сейсмических данных; сбор подкубов прогноза разломов в куб прогноза разломов.
Из уровня техники известен источник информации US20190383965A1, опубликованный 19.12.2019 г., раскрывающий способы геофизического глубокого обучения. Способ может включать в себя выбор типа геофизических данных; выбор типа алгоритма; создание синтетических геофизических данных по меньшей мере частично на основе алгоритма; обучение фреймворка глубокого обучения, основанного, по меньшей мере, частично на синтетических геофизических данных, для генерирования обученного фреймворка глубокого обучения; получение полученных геофизических данных для геологической среды; внедрение обученной системы глубокого обучения для получения результатов интерпретации полученных геофизических данных; и вывод результатов интерпретации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей, на решение которой направлено заявленное техническое решение, является автоматизация определения тектонических разломов на сейсмических 3D изображениях c применением нейронной сети и верификация данных обучения нейронной сети на реальных данных. Специалисты-геофизики в нефтегазовых компаниях проводят работы по нахождению положения разломов на основе суммированных кубов данных, что является ключевым шагом для интерпретации сейсмических структур, определения характеристик коллектора и размещения скважин. В традиционных методах разломы рассматриваются как разрывы сейсмических отражений и обнаруживаются путем вычисления атрибутов, которые оценивают непрерывность или неоднородности отражений. Традиционные методы не могут обеспечить качественное выделения разломов в виду сильных шумовых эффектов на сейсмических данных. В связи с этим предложен способ определения тектонических разломов на сейсмических данных посредством нейронной сети, который охарактеризован в независимом пункте формулы. Дополнительные варианты реализации настоящего изобретения представлены в зависимых пунктах изобретения.
Технический результат заключается в автоматизированном предсказании тектонических разломов сейсмических данных на сейсмических 3D изображениях. Дополнительно, технический результат заключается в повышении качества и точности определения тектонических разломов по сейсмическим данным, что позволяет эффективнее работать с геологическими неопределенностями, а также в сокращении времени, необходимого для получения обученной модели лучшего качества за счет возможности более быстрого дообучения и настройки нейронной сети, что приводит к увеличению скорости обнаружения тектонических разломов. Дополнительно, технический результат заключается в реализации назначения.
Заявленный результат достигается за счет осуществления способа определения тектонических разломов на сейсмических данных посредством нейронной сети, содержащий этапы, на которых:
получают сейсмические 3D изображения земной коры, посредством применения физических методов, и передают их на вычислительное устройство;
на вычислительном устройстве, на вход обученной нейронной сети поступают сейсмические 3D изображения земной коры для предсказания тектонических разломов, а на выходе получают бинарную маску сейсмических 3D изображений с предсказанием тектонических разломов;
осуществляют постобработку полученной бинарной маски сейсмических 3D изображений тектонических разломов;
причем процесс обучения нейронной сети включает следующие этапы:
осуществляют моделирование синтетических сейсмических 3D изображений, причем моделирование синтетических сейсмических 3D изображений включает в себя моделирование зон несогласия, изменения амплитуды разломов, моделирование затухающего смещения разлома и моделирование микро-разрывов;
осуществляют аугментацию полученных синтетических сейсмических изображений;
полученные с предыдущих шагов синтетические сейсмические 3D изображения поступают на вход нейронной сети U-Net состоящей из 4-х слоев для предсказания тектонических разломов, на выходе обученной нейронной сети получают бинарную маску сейсмических 3D изображений с предсказанием тектонических разломов, причем в процессе обучения нейронной сети, полученные сейсмические 3D изображения с предсказанием разломов сравнивают с эталонным синтетическим сейсмическим 3D изображением, посредством расчета функции потерь, где определяют необходимость наложения штрафа на нейронную сеть в областях, где предсказание тектонических разломов не совпадает,
после обучения нейронной сети на синтетических сейсмических 3D изображениях осуществляют оптимизацию процесса моделирования синтетического материала посредством расчета штрафа между полученным предсказанием тектонических разломов и кросс-валидационной выборкой, включающей реальные размеченные сейсмические 3D изображения земной коры с тектоническими разломами, если обученная нейронная сеть неудовлетворительно предсказывает реальные сейсмические 3D изображениями земной коры, то осуществляют повторное моделирование синтетических 3D изображений и повторяют процесс обучения нейронной сети.
В частном варианте реализации предлагаемого способа, на бинарной маске сейсмических 3D изображений с предсказанием тектонических разломов, каждому пикселю присваивают значение 0, если на сейсмической записи нет тектонических разломов или присваивают значение 1, если на сейсмической записи есть тектонический разлом.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
Фиг.1 иллюстрирует процесс моделирования синтетических сейсмических 3D изображений земной коры.
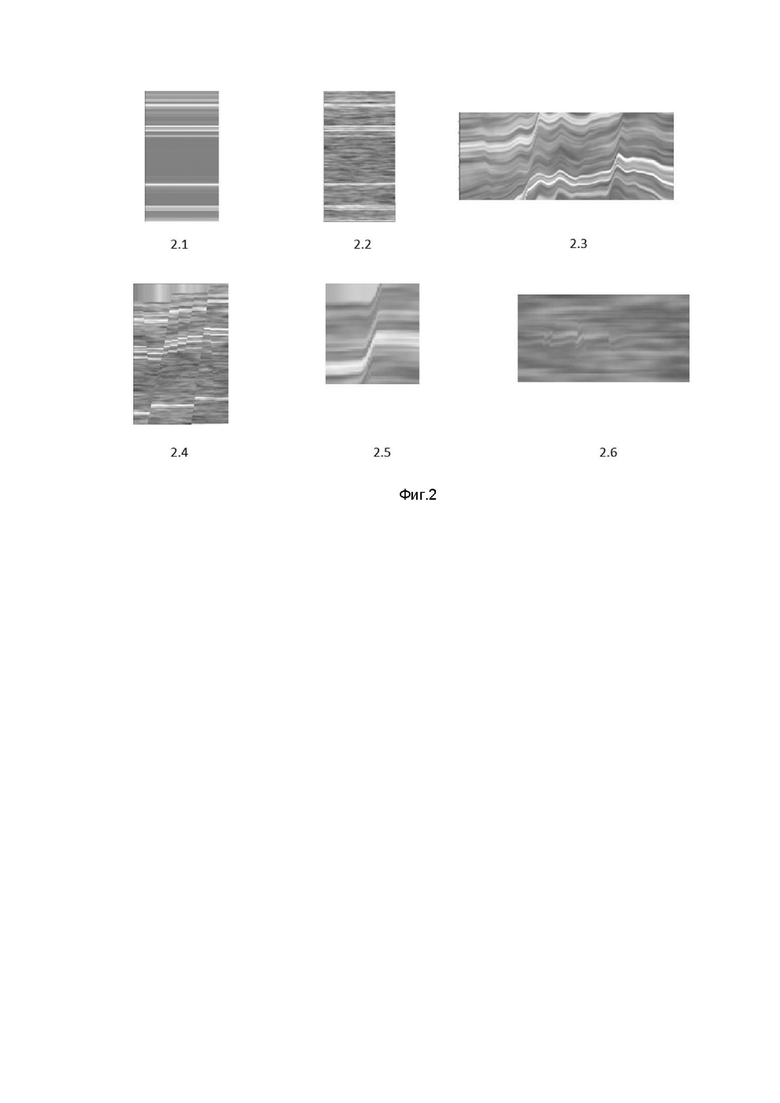
Фиг.2 иллюстрирует примеры моделирования.
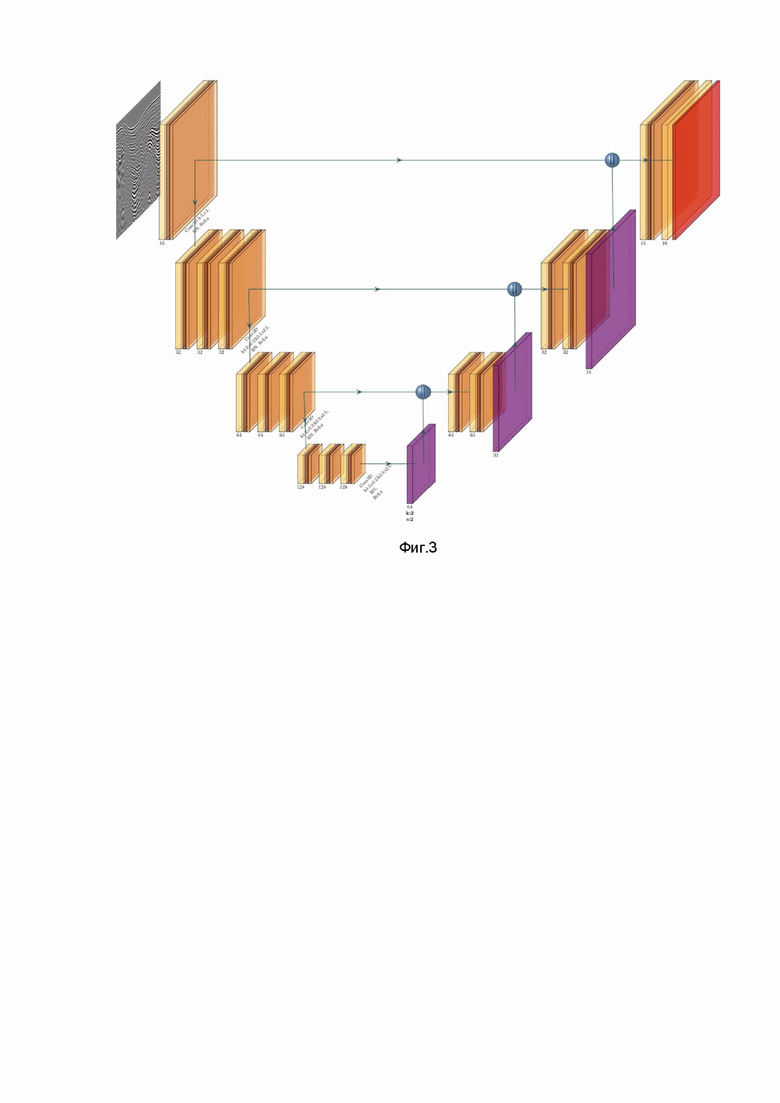
Фиг.3 иллюстрирует архитектуру нейронной сети для предсказания тектонических разломов.
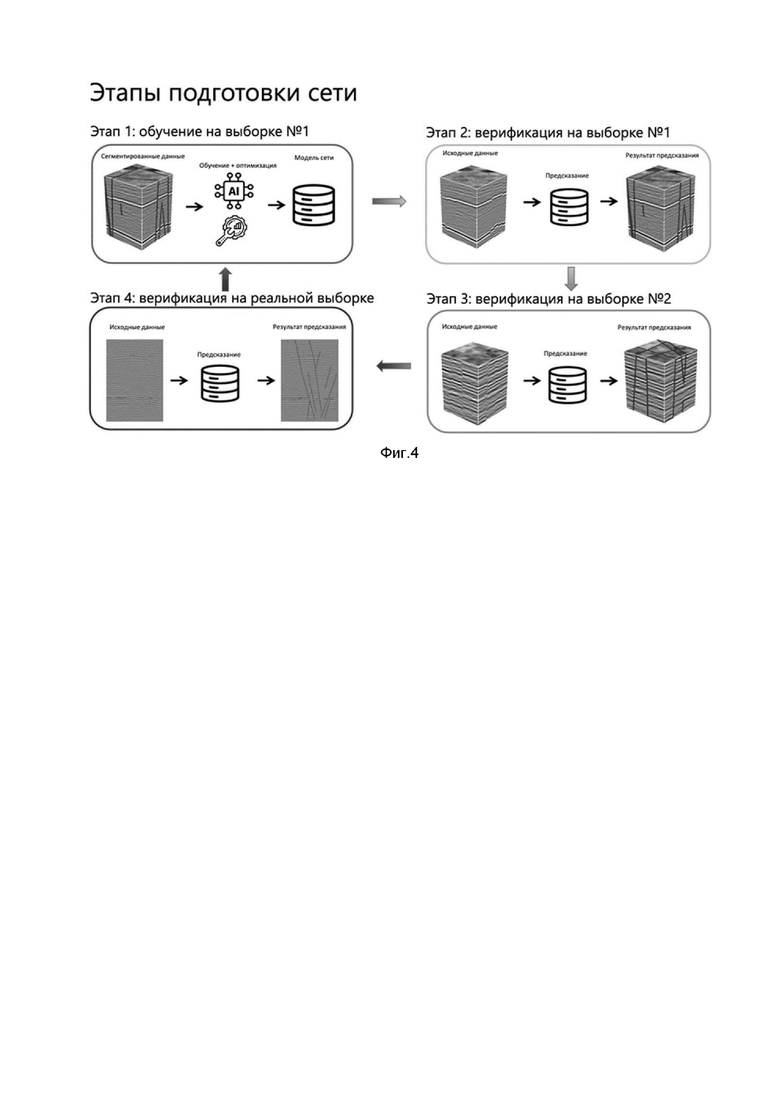
Фиг.4 иллюстрирует схему обучения нейронной сети.
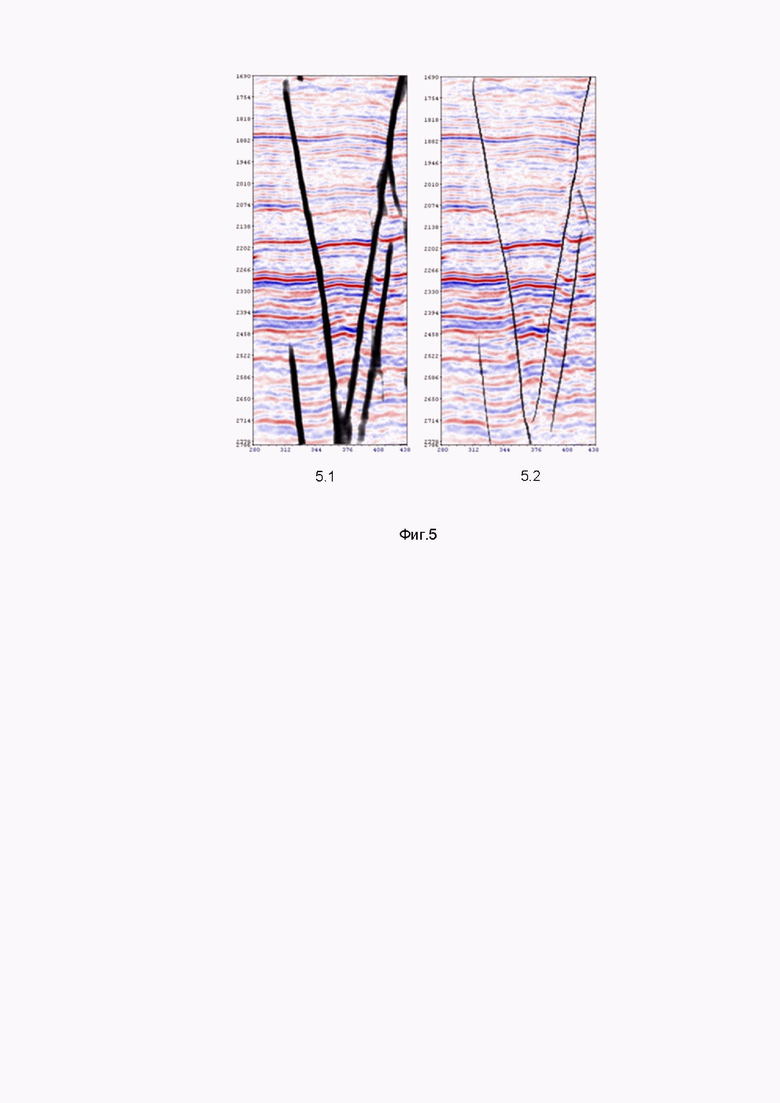
Фиг.5 иллюстрирует сейсмические 3D изображения до обработки и после обработки.
Фиг.6 иллюстрирует сейсмическое 3D изображение c атрибутом вероятности разлома.
Фиг.7 иллюстрирует сейсмическое 3D изображение c атрибутом вероятности разлома в новом пространстве.
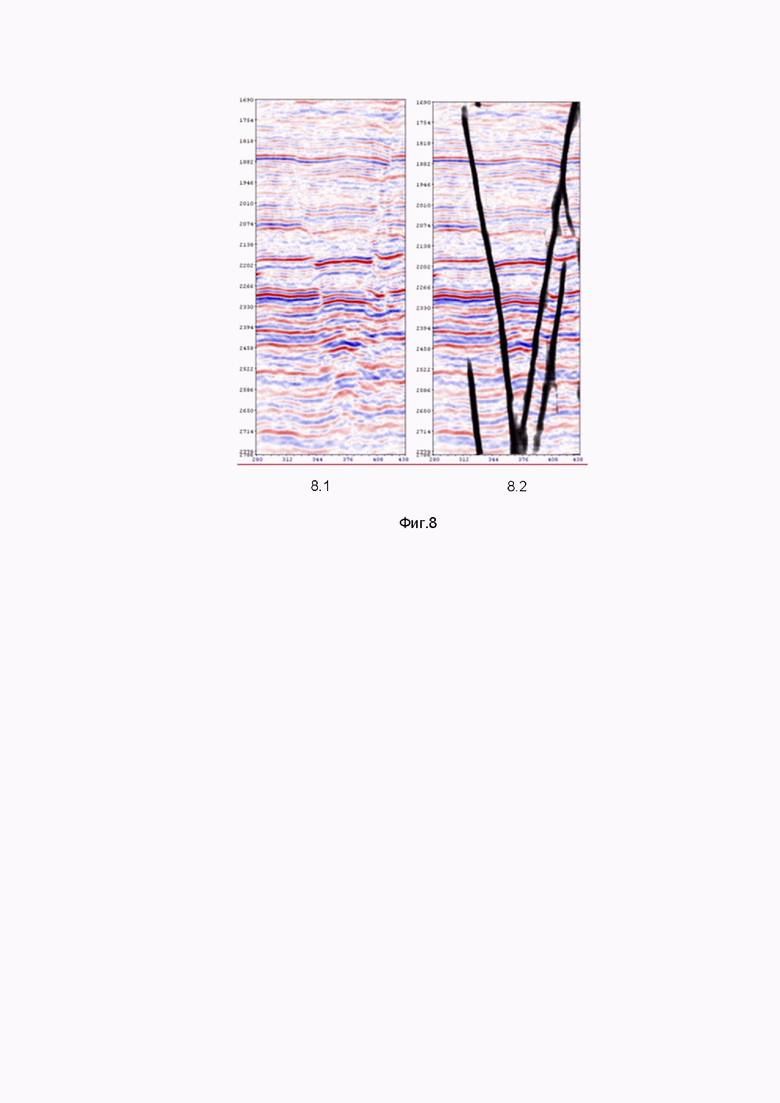
Фиг.8 иллюстрирует пример реального сейсмического 3D изображения и сейсмического 3D изображения после работы нейронной сети.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Предлагаемый способ определения тектонических разломов на сейсмических данных посредством нейронной сети использует суммированные сейсмические данных, которые получаются на основе замера физических процессов при помощи сейсморазведки.
В основе всех сейсмических методов лежит возбуждение упругих волн при помощи технического устройства-источника. При помощи взрыва, вибрации или удара, источник создает в толще горных пород избыточное давление, которое компенсируется средой в течение некоторого времени. Распространяясь в объеме горных пород, упругие волны попадают на границы слоев с различными упругими свойствами, изменяют направление, углы лучей и амплитуду, образуются новые волны. На пути следования волн размещаются пункты приема, где при помощи сейсмоприемников принимаются колебания частиц и преобразуются в электрический сигнал. Записанные на каждом приемнике, такие электрические сигнала называются сейсмограммами. Получаемые в процессе полевых работ сейсмограммы содержат значительную долю нежелательных волн-помех и мешающих колебаний, а полезные волны неудобны для интерпретации. Данные сейсмограммы, посредством средств телекоммуникации передают на вычислительное устройство, где обрабатываются обученной нейронной сетью для определения тектонических разломов.
Для оптимизации процесса моделирования синтетического материала в процессе обучения нейронной сети необходимо получить суммированный куб сейсмических данных, для этого ранее полученные сейсмограммы, посредством средств телекоммуникации, передаются на вычислительное устройство, где первичные сейсмограммы обрабатываются в таких программных средствах как Schlumberger Omega, RadeEXPro и др. с использованием самой современной компьютерной техники. В результате выполнения процедур обработки сейсмограммы преобразуются во временной или глубинный разрез - материал для геологического толкования.
Полученный суммированный куб сейсмических данных представляет собой сейсмические 3D изображения земной коры. Данный суммированный куб сохраняется в средстве хранения информации (например, базе данных).
Для обучения нейронной сети необходимо собрать массив обучающих данных, для этого осуществляют генерацию синтетических сейсмических 3D изображений.
На вычислительном устройстве осуществляют моделирование синтетических сейсмических 3D изображений земной коры. На фиг. 1 проиллюстрировано моделирование синтетических сейсмических 3D изображений земной коры, где посредством генератора синтетических данных осуществляется моделирование синтетических сейсмических 3D изображений земной коры и включает моделирование (наложение) на изображение следующих данных: данные отражений (фиг.2, 2.1), добавление структурного шума (фиг.2, 2.2), расположение складок, расположение разломов, расположение зон несогласия (фиг.2, 2.3), изменения амплитуды разломов (фиг.2, 2.4), моделирование затухающего смещения разлома (фиг.2, 2.5) и моделирование микро-разрывов (фиг.2, 2.6).
При моделировании отражений дополнительно используют модели импеданса, которые получают из реальных сейсмических данных.
После того как сгенерированы синтетические сейсмические 3D изображения, на их основе осуществляют аугментацию - транспонирование осей ХУ, поворот на 90 градусов. Для увеличения объема обучающей выборки.
Полученный набор сейсмический 3D изображений (сгенерированные синтетические сейсмические 3D изображения и 3D изображения, полученные в результате аугментации) является обучающей выборкой и поступает на вход обученной нейронной сети для предсказания тектонических разломов.
Обученная нейронная сеть работает так, что синтетические 3D изображения подаются на вход и на выходе получается бинарная маска сейсмических 3D изображений с предсказанием тектонических разломов. Бинарная маска сейсмических 3D изображений с предсказанием тектонических разломов строится следующим образом: на тех местах, где выделяется разлом, ставится единица, там, где разлом не выделяется ставится ноль.
Архитектура нейронной сети для предсказания тектонических разломов.
Архитектура нейронной сети является модификацией известной архитектуры “U-Net”. На фиг. 3 проиллюстрирована архитектура модифицированной нейронной сети U-Net состоящей из 4-х слоев. Архитектура поделена на две части, левая часть называется сжимающей, а правая - разжимающей. На первом слое получают синтетическое сейсмическое 3D изображение размером 96х96х160, там же сейсмическое 3D изображение проходит через 3D конволюционный слой с 16 фильтрами и ядром 5х5х5. На второй уровень приходит изображение размером 16х96х96х160, на втором слое сейсмическое 3D изображение проходит 3 конволюционных слоя с 32 фильтрами. На третий уровень приходит сейсмическое 3D изображение уже с размером 32х48х48х80 и проходит еще 3 конволюции с 64 фильтрами. На четвертый уровень сейсмическое 3D изображение уже имеет размером 64х24х24х40 и после 3-х конволюций с 128 фильтрами выходит размером 128х12х12х20.
Правая часть обратно разжимает изображение из четвертого слоя 128х12х12х20 в размер 96х96х160 на первом. Последний слой является слоем сегментации, которая выдает 3D изображение сегментации разлома. В последнем слое используется сигмойдная функция активации.
Во всех конволюциях, кроме последней, используется линейная функция активации (ReLU) и на всех слоях используется пакетная оптимизация (Batch normalization).
Разломы на сейсмических материалах выделяются шириной в 1 пиксель, что может составлять всего лишь 1-2 % от общего количества пикселей. Из-за большого дисбаланса между количеством примеров используется функция потерь на основе бинарной кросс-энтропии.

Где Loss - функция потерь, y - идеальная сегментация и y(hat) - предсказанная сегментация.
Посредством бинарной кросс-энтропии происходит процесс обучения нейронной сети, другими словами, это объектная функция, которую нейронная сеть пытается минимизировать. Сам минимизационный процесс происходит в аппарате оптимизаторов. Для данного технического изобретения использовался оптимизатор, основанный на методе адаптивной оценки моментов (Adaptive Moment Estimation), который входит в семейство методов стохастического градиентного спуска (https://ru.wikipedia.org/wiki/%D0%A1%D1%82%D0%BE%D1%85%D0%B0%D1%81%D1%82%D0%B8%D1%87%D0%B5%D1%81%D0%BA%D0%B8%D0%B9_%D0%B3%D1%80%D0%B0%D0%B4%D0%B8%D0%B5%D0%BD%D1%82%D0%BD%D1%8B%D0%B9_%D1%81%D0%BF%D1%83%D1%81%D0%BA#Adam).
Где L - функция потерь, Beta1-2 - являются коэффициентами забывания для градиентов и вторых моментов градиентов, t - индекс текущей итерации.
Представленные компоновка архитектуры нейронной сети, функции потерь, метода оптимизации, и синтетических данных (+аугментация), позволяют получить высокую предсказательную способность нейронной сети на данных реальных месторождений для определения тектонических разломов.
Обучение нейронной сети для предсказания тектонических разломов.
Полученный массив синтетических 3D изображений от генератора поступают на вход нейронной сети. Массив синтетических 3D изображений представляет собой пары 2000-3000 синтетических 3D изображений и бинарная маска тектонических разломов. Бинарная маска тектонических разломов на синтетических сейсмических 3D изображениях проставляется генератором, на этапе генерации синтетических сейсмических 3D изображений.
Полученный массив случайным образом делится на обучающую и тестовую выборки. Обучающая выборка - часть синтетических 3D изображений из общего массива, которая используется для обучения нейронной сети. Тестовая выборка - часть синтетических 3D изображений из общего массива, на которых проверяют качество обучения нейронной сети.
При обучении нейронной сети осуществляют расставление весов таким образом, чтобы результат (определение тектонических разломов), совпал с сгенерированными сейсмическими 3D изображениями.
На фиг.4 проиллюстрирована последовательность обучения нейронной сети для предсказания тектонических разломов. Обучающая выборка подается на вход нейронной сети (этап 1 и 2), а на выходе ожидается 3D изображение разломов. После обучения нейронной сети на обучающей выборке осуществляют тестирование нейронной сети на тестовой выборке для определения корректности обучения (этап 3). Тестирование оканчивается тогда, когда метрика на тестовой выборке и обучающей будет в районе 0.7-1.0 по F мере. В случае если метрика будет ниже ожидаемой (0.7 по F мере), то тогда подбираются новые элементы архитектуры, методы аугментации, функции потерь и т. д., до тех пор, пока метрика не выйдет на нужный уровень.
В процессе обучения нейронной сети, нейронная сеть предсказывает наличие тектонических разломов на синтетических 3D изображения. Данное предсказанное 3D изображение сравнивается с эталонным синтетическим 3D изображением, полученным от генератора синтетических данных. Сравнение происходит посредством расчета функции потерь, которое определяет необходимость наложения штрафа на нейронную сеть в тех областях, где определение тектонических разломов не совпадает с идеальным определением тектонических разломов на эталонном синтетическим 3D изображении.
Для оценки качества определение тектонических разломов используются метрики оценивания. В данном техническом решении такой метрикой является F мера. Эта стандартная метрика, которая используется в большинстве задач по бинарной сегментации изображений. F мера сводится к одной цифре, которая гармонически усредняет две другие метрики: точность (precision) и полноту (recall).
 ,
,
Где TP, FN - это истинно положительный и ложноотрицательные значения.
Так как сейсмическая запись может иметь отличное распределение амплитуд из-за разных методов получения информации или по геологическим признакам, 3D изображения проходят этап стандартизации для целей приведения амплитуд к единому уровню. Нормировка проводится в единичном объеме размером 96х96х160 пикселей, посредством вычитания среднего значения и деления на стандартное отклонение.
Где z - элементарное 3Д сейсмическое изображение.
Штрафом называется ошибка в определении, которая является значением вычисленной функции потерь, и чем значение выше, тем больше ошибка. Входом нейронной сети является 3D изображение размером 96х96х160 пикселей. На выходе из нейронной сети ожидается 3D изображение размером 96х96х160 пикселей, что является вероятностью нахождения тектонического разлома в данном изображении. Каждому пикселю присвоено одно из двух значений: 0 фоновая сейсмическая запись, которая не вызывает интереса, и 1 тектонический разлом.
Тестирование на реальных данных (этап 4). После того как нейронная сеть обучена на обучающей выборке и проверена на тестовой выборке, нужно проверить нейронную модель на реальных данных. Проверяются метрики предсказания на кросс-валидационной выборке. Кросс-валидационная выборка - это суммированный куб сейсмических данных, который получен про помощи сейсмических методов, описанных выше. Данные размечаются специалистами-геофизиками для целей точного выделения разломов.
Метрика точности - 0.4-0.7 по F мере. Если метрика ниже этого значения, то это значит, что подобранные параметры синтетического генератора не являются правильными для текущих реальных данных. Нужно проводить подбор новых параметров синтетического материала. Для этого возвращаемся на 1 пункт и подбираем новые параметры моделирования сейсмического поля.
Данный итерационный процесс производится до тех пор, пока нужная метрика на тестовых и кросс-валидационных данных не достигнет желаемого значения 0.4-0.7 по F мере.
Если результаты предсказания тектонических разломов удовлетворяют критериям качества, то осуществляют постобработку полученной бинарной маски сейсмических 3D изображений тектонических разломов. Постобработка осуществляется на основе алгоритма «Согласования оптимальных траекторий» со ссылкой на фиг. 5, где 5.1 - сейсмическое 3D изображение до обработки, а 5.1 - сейсмическое 3D изображение после обработки (Xinming Wu and Sergey Fomel, (2018), "Automatic fault interpretation with optimal surface voting," GEOPHYSICS 83: O67-O82).
На первом этапе осуществляют оценка траекторий тектонических разломов используется метод фильтрации или сканирования. В результате постобработки происходит анализ вероятности наличия разломов вдоль всех возможных направлений, чтобы выявить максимальные значение на сечениях. Траектории, которые дают максимальное значение атрибута на сечениях, записываются как основные.
Для определения оптимальной траектории поверхности разлома выполняют преобразование изображения атрибута вероятности разлома (фиг.6) в новое пространство (фиг.7), где вертикальная ось представляет линейное направление, а горизонтальная ось - глубину.
На рисунке фиг.7 (а) разлом, проходящий через контрольную точку (желтый круг), является оптимальной траекторией с максимальными значениями вероятности.
Если обозначить вертикальную и горизонтальную оси символом j(j=0,1,…,m-1) и i(i= 0,1,… ,n - 1), соответственно, как показано на фиг.7 (б), то путь слева направо, описывается как j[i].
Чтобы выбрать траекторию с небольшим и медленно меняющимся наклоном, решается следующая задача ограниченной максимизации:
где g [i, j] - входное изображение атрибута, а второе уравнение представляет ограничения наклона, с помощью ограничения верхней границы наклона ε.
Решив данную задачу, используя нелинейное сглаживание, определяется оптимальная траектория разлома. Сглаживание применяется для улучшения характеристик, связанных с разломами, и ослабления шума. Такой сглаживающий фильтр реализуется путем применения нелинейного сглаживания к входному изображению атрибута разлома как в прямом, так и в обратном направлении.
На втором этапе вычисления оптимальных траекторий автоматически вычисляются стартовые точки.
Сначала выполняется проверка точек в порядке от точки с наибольшим значением атрибута до точки с наименьшим значением. При проверке точек вычисляется расстояние между текущей точкой и всеми другими. Точка определяется как истинная только в том случае, если минимальное расстояние между точками больше заданного радиуса.
При увеличении радиуса между точками, уменьшается вычислительное время для последующего выбора оптимальной траектории. При меньшем радиусе будет использоваться больше стартовых точек, что увеличит качество результата определения траекторий, но потребуется больше вычислительного времени.
Затем для каждой стартовой точки определяется трехмерное окно, центр которого находится в стартовой точке, а грани расположены параллельно направлению падения и простирания разлома.
При этом внутри окна поиска обнуляется окрестность вокруг стартовой точки, а в месте расположения самой точки принимается за единицу для того, чтобы траектория гарантированно прошла через нее. Окно поиска берется в несколько раз больше, чем расстояние между стартовыми точками.
При получении максимального значения атрибута вероятности разлома в окне поиска определяется оптимальная траектория каждого разлома.
На следующем шаге определяются выбранные траектории как поверхности вероятности разломов, а значения атрибутов как значение вероятности разломов.
Поверхности разломов определяются как:

где к-траектория,
p = 0, 1, …, N -1.
Суммарная вероятность sk(p) на k-й поверхности разломов определяется следующим образом:
где g (v k(p)) - значения атрибута вероятности разлома на траектории.
Поскольку значения атрибутов на участках поверхности являются прерывистыми, к ним применяется гауссовский сглаживающий фильтр к значениям на каждой из поверхностей.
Процесс при вычислении поля вероятности m (i, j) состоит в том, чтобы собрать все значения вероятности на всех m поверхностях:

Для k = 0, 1, 2, …., M - 1
Таким образом, поверхности с более высокими значениями вероятности и пройденные многократно будут генерировать более высокие значения в накопленной карте вероятности m (i, j), в то время как поверхности с низкими значениями вероятности будут подавлены в накопленной карте.
Пример работы способа определения тектонических разломов на сейсмических данных посредством нейронной сети со ссылкой на фиг.8.
Получают сейсмические 3D изображения земной коры (8.1), посредством применения физических методов, и передают их на вычислительное устройство посредством средств телекоммуникационной связи.
На вычислительном устройстве, на вход обученной нейронной сети поступают сейсмические 3D изображения земной коры размером 96x96x160 для предсказания тектонических разломов и осуществляются этапы, описанные выше в параграфе «Архитектура нейронной сети для предсказания тектонических разломов». На выходе получают бинарную маску сейсмических 3D изображений с предсказанием тектонических разломов.
Осуществляют постобработку бинарной маски сейсмических 3D изображений с предсказанием тектонических разломов, как описано выше, и выводят полученный результат с отображением тектонических разломов (8.2)
Далее будет представлена общая схема вычислительного устройства, обеспечивающего обработку данных, необходимую для реализации заявленного решения.
В общем случае устройство содержит такие компоненты, как: один или более процессоров, по меньшей мере одну память, средство хранения данных, интерфейсы ввода/вывода, средство В/В, средства сетевого взаимодействия, а также видеокарту.
Процессор устройства выполняет основные вычислительные операции, необходимые для функционирования устройства или функциональности одного или более его компонентов. Процессор исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти.
Память, как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал.
Средство хранения данных может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство позволяет выполнять долгосрочное хранение различного вида информации, например, вышеупомянутых файлов с наборами данных пользователей, базы данных, содержащих записи измеренных для каждого пользователя временных интервалов, идентификаторов пользователей и т.п.
Интерфейсы представляют собой стандартные средства для подключения и работы с серверной частью, например, USB, RS232, RJ45, LPT, COM, HDMI, PS/2, Lightning, FireWire и т.п.
Выбор интерфейсов зависит от конкретного исполнения устройств, которое может представлять собой персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п.
В качестве средств В/В данных в любом воплощении системы, реализующей описываемый способ, должна использоваться клавиатура. Аппаратное исполнение клавиатуры может быть любым известным: это может быть, как встроенная клавиатура, используемая на ноутбуке или нетбуке, так и обособленное устройство, подключенное к настольному компьютеру, серверу или иному компьютерному устройству. Подключение при этом может быть, как проводным, при котором соединительный кабель клавиатуры подключен к порту PS/2 или USB, расположенному на системном блоке настольного компьютера, так и беспроводным, при котором клавиатура осуществляет обмен данными по каналу беспроводной связи, например, радиоканалу, с базовой станцией, которая, в свою очередь, непосредственно подключена к системному блоку, например, к одному из USB-портов. Помимо клавиатуры, в составе средств В/В данных также может использоваться: джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
Средства сетевого взаимодействия выбираются из устройства, обеспечивающий сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п. С помощью средств обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM.
Компоненты устройства сопряжены посредством общей шины передачи данных.
Видеокарта для распараллеливания вычислений по технологии CUDA представляет собой видеокарты nVidia с индексом compute capability >= 3.5.
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система интеллектуального определения тектонических нарушений по сейсмическим данным на основе сверточных нейронных сетей | 2020 |
|
RU2746691C1 |
| ИНТЕРАКТИВНАЯ СЕГМЕНТАЦИЯ ИЗОБРАЖЕНИЙ | 2023 |
|
RU2833268C1 |
| СПОСОБ ОБУЧЕНИЯ СВЕРТОЧНОЙ НЕЙРОННОЙ СЕТИ ОСУЩЕСТВЛЯТЬ РАЗМЕТКИ ТЕЛЕРЕНТГЕНОГРАММ В ПРЯМОЙ И БОКОВОЙ ПРОЕКЦИЯХ | 2019 |
|
RU2717911C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ОБЪЕМНЫХ ОБРАЗОВАНИЙ ПОЧЕК НА КОМПЬЮТЕРНЫХ ТОМОГРАММАХ БРЮШНОЙ ПОЛОСТИ | 2024 |
|
RU2839531C1 |
| Способ трехмерного структурного картирования разломных зон и полей напряжений осадочного чехла земной коры для месторождений углеводородов | 2021 |
|
RU2790476C1 |
| Способ определения остаточной ткани коркового слоя надпочечника при органосохраняющих операциях по поводу феохромоцитомы на основе анализа КТ-изображений средствами сверточной нейронной сети U-net | 2023 |
|
RU2813154C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОШЕННИЧЕСКИХ ТРАНЗАКЦИЙ ПОЛЬЗОВАТЕЛЯ | 2024 |
|
RU2839053C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ГЕНЕРАЦИИ СИНТЕТИЧЕСКИХ ДАННЫХ | 2023 |
|
RU2824524C1 |
| ОБУЧЕНИЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ С ПОМОЩЬЮ СИНТЕТИЧЕСКИХ ФОТОРЕАЛИСТИЧНЫХ СОДЕРЖАЩИХ ЗНАКИ ИЗОБРАЖЕНИЙ | 2018 |
|
RU2709661C1 |
| СИСТЕМА ДЛЯ ГЕНЕРАЦИИ ВИДЕО С РЕКОНСТРУИРОВАННОЙ ФОТОРЕАЛИСТИЧНОЙ 3D-МОДЕЛЬЮ ЧЕЛОВЕКА, СПОСОБЫ НАСТРОЙКИ И РАБОТЫ ДАННОЙ СИСТЕМЫ | 2024 |
|
RU2834188C1 |


Изобретение относится к способам обработки и интерпретации сейсмических данных для определения тектонических разломов. Сущность: получают сейсмические 3D изображения земной коры. Полученные изображения передают на вход обученной нейронной сети. На выходе обученной нейронной сети получают бинарную маску сейсмических 3D изображений с предсказанием тектонических разломов. Выполняют постобработку полученной бинарной маски сейсмических 3D изображений тектонических разломов. Технический результат: автоматизация процесса определения тектонических разломов. 8 ил.
1. Cпособ определения тектонических разломов на сейсмических данных посредством нейронной сети, содержащий этапы, на которых:
получают сейсмические 3D изображения земной коры посредством применения физических методов и передают их на вычислительное устройство;
на вычислительном устройстве на вход обученной нейронной сети поступают сейсмические 3D изображения земной коры для предсказания тектонических разломов, а на выходе получают бинарную маску сейсмических 3D изображений с предсказанием тектонических разломов;
осуществляют постобработку полученной бинарной маски сейсмических 3D изображений тектонических разломов;
причем процесс обучения нейронной сети включает следующие этапы:
осуществляют моделирование синтетических сейсмических 3D изображений, причем моделирование синтетических сейсмических 3D изображений включает в себя моделирование зон несогласия, изменения амплитуды разломов, моделирование затухающего смещения разлома и моделирование микро-разрывов;
осуществляют аугментацию полученных синтетических сейсмических изображений;
полученные с предыдущих шагов синтетические сейсмические 3D изображения поступают на вход нейронной сети U-Net, состоящей из 4-х слоев для предсказания тектонических разломов, на выходе обученной нейронной сети получают бинарную маску сейсмических 3D изображений с предсказанием тектонических разломов, причем в процессе обучения нейронной сети полученные сейсмические 3D изображения с предсказанием разломов сравнивают с эталонным синтетическим сейсмическим 3D изображением посредством расчета функции потерь, где определяют необходимость наложения штрафа на нейронную сеть в областях, где предсказание тектонических разломов не совпадает,
после обучения нейронной сети на синтетических сейсмических 3D изображениях осуществляют оптимизацию процесса моделирования синтетического материала по средствам расчета штрафа между полученным предсказанием тектонических разломов и кросс-валидационной выборкой, включающей реальные размеченные сейсмические 3D изображения земной коры с тектоническими разломами, если обученная нейронная сеть неудовлетворительно предсказывает реальные сейсмические 3D изображениями земной коры, то осуществляют повторное моделирование синтетических 3D изображений и повторяют процесс обучения нейронной сети.
2. Способ по п.1, отличающийся тем, что на бинарной маске сейсмических 3D изображений с предсказанием тектонических разломов каждому пикселю присваивают значение 0, если на сейсмической записи нет тектонических разломов, или присваивают значение 1, если на сейсмической записи есть тектонический разлом.
| Система интеллектуального определения тектонических нарушений по сейсмическим данным на основе сверточных нейронных сетей | 2020 |
|
RU2746691C1 |
| WO 2019036144 А1, 21.02.2019 | |||
| Р.Ф | |||
| Мифтахов и др | |||
| Картирование тектонических нарушений на основе машинного обучения нейронных сетей / Геология нефти и газа, 2021, N3, стр.123-136. | |||

