Изобретение относится к управлению кораблями и может быть использовано для прогнозирования траекторий движения кораблей, а также подводных объектов, находящихся в надводном положении, выполняющих сложное маневрирование.
Известен способ определения позиционных составляющих гидродинамической силы и гидродинамического момента, основанный на раздельном расчетном определении этих характеристик на корпус корабля и руль с последующим суммированием этих характеристик (см. Фирсов Г.А. Управляемость корабля / Г.А. Фирсов. - Л.: Издательство ВВМИУ им. Ф.Э. Дзержинского, 1954. стр. 55-59).
Недостатком этого способа является лишь приближенный учет формы корпуса корабля, что приводит к погрешностям, снижает точность прогнозирования движения корабля и безопасность управления кораблем.
Известны также экспериментальные способы определения позиционных гидродинамических характеристик корабля, основанные на испытании моделей в аэродинамической трубе или опытовом бассейне (см. Войткунский Я.И., Першиц Р.Я., Титов И.А. Справочник по теории корабля / Войткунский Я.И. - Л.: Судостроение, 1973. стр. 279-281). Действующие на модель силы и моменты измеряются с помощью весов специальной конструкции.
Недостатком этих способов является наличие масштабного эффекта, что приводит к погрешностям, снижает точность прогнозирования движения корабля и безопасность управления кораблем, а также высокая стоимость производства физических моделей корабля.
Известен также «Способ определения позиционных гидродинамических характеристик корабля» (пат. RU №2746472, опубл. 14.04.2021, МПК: В63Н 25/00) - взятый за прототип, включающий определение центра вращения корабля, формирование трехмерной электронной модели корабля, при этом часть корпуса корабля, расположенную выше ватерлинии отсекают. Вокруг этой трехмерной электронной модели корабля формируют внутреннюю вычислительную сетку в виде сферического сегмента, внутреннюю вычислительную сетку в виде сферического сегмента выполняют с возможностью вращения вместе с трехмерной электронной моделью корабля относительно внешней вычислительной сетки. Основание сегмента содержит плоскость ватерлинии модели, а ось симметрии сегмента совмещают с осью вращения модели. В расчетной области, занятой внутренней и внешней вычислительными сетками, определяют распределение полей скоростей и давлений потока. Скорость движения жидкости на входной по отношению к потоку границе расчетной области задают равной линейной скорости движения корабля. При этом последовательно задают угловые перемещения трехмерной электронной модели корабля по углу дрейфа β. В результате определяют стационарные гидродинамические воздействия на трехмерную электронную модель корабля при разных значениях угла дрейфа β, анализируют их и затем определяют позиционные гидродинамические характеристики корабля. Затем эти позиционные гидродинамические характеристики используют при компьютерном моделировании для прогнозирования движения корабля.
Недостатком этого способа являются возможные погрешности расчета в области сопряжения внутренней и внешней вычислительной сетки, что снижает точность прогнозирования движения корабля и безопасность управления кораблем.
Задачей изобретения является повышение безопасности управления кораблем при выполнении им сложного маневрирования за счет повышения точности прогнозирования его движения по заданной траектории с использованием компьютерного моделирования на базе рассчитываемых позиционных гидродинамических характеристик корабля, что снижает погрешность в определении диаметра циркуляции корабля при маневрировании, тем самым, уменьшается вероятность навигационных аварий.
Поставленная задача достигается тем, что предлагаемый способ определения позиционных гидродинамических характеристик корабля, включает формирование трехмерной электронной модели корабля, при этом часть корпуса корабля, расположенную выше ватерлинии отсекают, вокруг этой трехмерной электронной модели формируют вычислительную сетку. В расчетной области, занятой вычислительной сеткой, определяют распределение полей скоростей и давлений потока, скорость движения жидкости на входной по отношению к потоку границе расчетной области задают равной линейной скорости движения корабля, последовательно задают угловые перемещения трехмерной электронной модели корабля по углу дрейфа β. В результате определяют стационарные гидродинамические воздействия на корабль при разных значениях угла дрейфа β, анализируют их и затем определяют позиционные гидродинамические характеристики корабля по соотношениям:
cx(β)=ƒ(Fx(β));
cz(β)=ƒ(Fz(β));
my(β)=ƒ{My{(β)) здесь
сх - коэффициент позиционной гидродинамической силы по оси ОХ;
Fx - компонента позиционной гидродинамической силы по оси ОХ;
cz - коэффициент позиционной гидродинамической силы по оси OZ;
Fz - компонента позиционной гидродинамической силы по оси OZ;
my - коэффициент позиционного гидродинамического момента относительно оси OY;
Му - компонента позиционного гидродинамического момента относительно оси OY, затем эти позиционные гидродинамические характеристики используют при компьютерном моделировании для прогнозирования движения корабля в условиях сложного маневрирования, при этом в отличие от прототипа после формирования трехмерной электронной модели корабля вводят связанную с ней систему координат с началом в точке О, ось ОХ направляют в нос трехмерной электронной модели корабля, OY - вверх, OZ - на правый борт, при этом на входной по отношению к потоку границе расчетной области направление вектора скорости потока последовательно задают в соответствии с возможными угловыми перемещениями корабля относительно потока по углам дрейфа β.
Существенность отличий предлагаемого способа от прототипа определяется следующим. Последовательное выполнение операций, направленных на задание угловых перемещений корабля по углу дрейфа β позволяет:
- повысить точность прогнозирования движения корабля по заданной траектории с использованием компьютерного моделирования на базе рассчитываемых позиционных гидродинамических характеристик корабля,
- снизить погрешность в определении диаметра циркуляции корабля при маневрировании.
Таким образом, совокупность указанных существенных признаков позволяет обеспечить достижение нового технического результата, а именно:
- повысить безопасность управления кораблем при выполнении им сложного маневрирования;
- повысить точность управления кораблем.
Сущность способа определения позиционных гидродинамических характеристик корабля поясняется чертежами, где
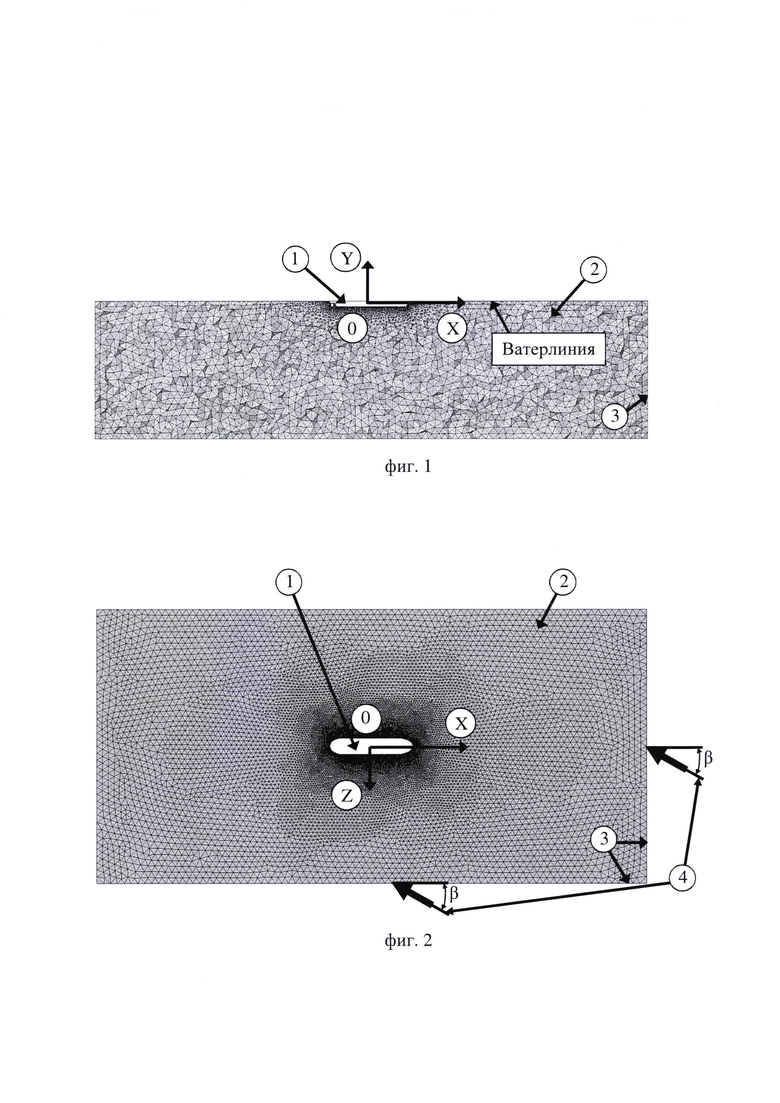
на фиг. 1 - общий вид расчетной области;
на фиг. 2 - схема, отражающая задание угловых перемещений вектора скорости набегающего потока по углу дрейфа.
Для определения позиционных гидродинамических характеристик корабля формируют его трехмерную электронную модель 1, при этом часть корпуса корабля, расположенную выше ватерлинии отсекают. Вокруг этой трехмерной электронной модели 1 формируют вычислительную сетку 2. В расчетной области, занятой вычислительной сеткой 2, определяют распределение полей скоростей и давлений потока. Скорость движения жидкости на входной по отношению к потоку границе расчетной области 3 задают равной линейной скорости движения корабля. Вводят связанную с трехмерной электронной моделью корабля 1 систему координат с началом в точке О. Ось ОХ направлена в нос трехмерной электронной модели корабля 1, OY - вверх, OZ - на правый борт. При этом на входной по отношению к потоку границе расчетной области 3 направление вектора скорости потока 4 последовательно задают в соответствии с возможными угловыми перемещениями корабля относительно потока по углам дрейфа β. В результате определяют стационарные гидродинамические воздействия на корабль при разных значениях угла дрейфа β, анализируют их и затем определяют позиционные гидродинамические характеристики корабля по соотношениям:
cz(β)=ƒ(Fz(β));
my(β)=ƒ{My(β)) здесь
сх - коэффициент позиционной гидродинамической силы по оси ОХ;
Fx - компонента позиционной гидродинамической силы по оси ОХ;
cz - коэффициент позиционной гидродинамической силы по оси OZ;
Fz - компонента позиционной гидродинамической силы по оси OZ;
my - коэффициент позиционного гидродинамического момента относительно оси OY;
Му - компонента позиционного гидродинамического момента относительно оси OY.
Полученные позиционные гидродинамические характеристики корабля используют при компьютерном моделировании для прогнозирования движения корабля в условиях сложного маневрирования.
Заявителем были проведены исследования рассматриваемого технического решения «Способ определения позиционных гидродинамических характеристик корабля», направленные на повышение безопасности управления кораблем, где в качестве объекта моделирования выбрано надводное транспортное средство, обладающее определенными гидродинамическими характеристиками.
Анализ полученных данных показал, что снижается погрешность в определении диаметра циркуляции корабля при маневрировании, тем самым, уменьшается вероятность навигационных аварий.
Точность управления кораблем увеличивается за счет учета стационарных гидродинамических воздействий, возникающих при угловых перемещениях корабля по углу дрейфа.
Таким образом, технический результат изобретения заключается в повышении безопасности управления кораблем при выполнении им сложного маневрирования, а также в повышении точности управления кораблем и уменьшении вероятности навигационных аварий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения позиционных гидродинамических характеристик корабля | 2020 |
|
RU2746472C1 |
| Способ определения позиционных гидродинамических характеристик подводного объекта | 2020 |
|
RU2735195C1 |
| Способ учета влияния работающего водометного движителя на позиционные гидродинамические характеристики подводного объекта | 2020 |
|
RU2746552C1 |
| Способ определения позиционных гидродинамических характеристик подводного объекта | 2022 |
|
RU2784549C1 |
| Способ определения позиционных гидродинамических характеристик подводного объекта | 2020 |
|
RU2746488C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕМПФИРУЮЩИХ ГИДРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КОРАБЛЯ | 2018 |
|
RU2690305C1 |
| Способ определения демпфирующих гидродинамических характеристик подводного объекта | 2020 |
|
RU2731817C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ ГИДРОДИНАМИЧЕСКОЙ СИЛЫ, ОБРАЗУЮЩЕЙСЯ НА КОРПУСЕ СУДНА ПРИ ВЫПОЛНЕНИИ СЛОЖНОГО МАНЕВРИРОВАНИЯ | 2012 |
|
RU2509032C1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК СВАЛИВАНИЯ И ШТОПОРА САМОЛЕТА (ВАРИАНТЫ) | 2005 |
|
RU2297364C1 |
| Способ определения демпфирующих гидродинамических характеристик подводного аппарата | 2019 |
|
RU2707017C1 |
Изобретение относится к управлению кораблями и может быть использовано для прогнозирования траекторий движения кораблей, а также подводных объектов, находящихся в надводном положении, выполняющих сложное маневрирование. Формируют трехмерную электронную модель корабля. Вокруг трехмерной модели формируют вычислительную сетку, определяют распределение полей скоростей и давлений потока. Скорость движения жидкости на входной по отношению к потоку границе расчетной области задают равной линейной скорости движения, последовательно задают угловые перемещения трехмерной модели по углу дрейфа β, определяют стационарные гидродинамические воздействия при разных значениях угла дрейфа β, анализируют их и определяют позиционные гидродинамические характеристики. Вводят систему координат с началом в точке О, ось ОХ направляют в нос трехмерной модели, OY - вверх, OZ - на правый борт. На входной по отношению к потоку границе расчетной области направление вектора скорости потока последовательно задают в соответствии с возможными угловыми перемещениями корабля относительно потока по углам дрейфа β. Повышается безопасность и точность управления. 2 ил.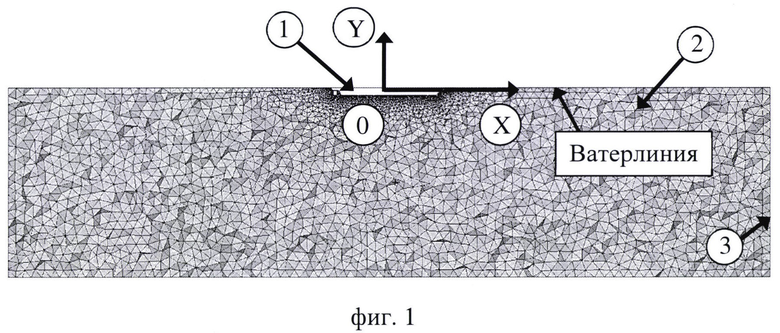
Способ определения позиционных гидродинамических характеристик корабля, включающий формирование трехмерной электронной модели корабля, при этом часть корпуса корабля, расположенную выше ватерлинии отсекают, вокруг этой трехмерной электронной модели формируют вычислительную сетку, в расчетной области, занятой вычислительной сеткой, определяют распределение полей скоростей и давлений потока, скорость движения жидкости на входной по отношению к потоку границе расчетной области задают равной линейной скорости движения корабля, последовательно задают угловые перемещения трехмерной электронной модели корабля по углу дрейфа β, в результате определяют стационарные гидродинамические воздействия на корабль при разных значениях угла дрейфа β, анализируют их и затем определяют позиционные гидродинамические характеристики корабля по соотношениям:
cx(β)=ƒ(Fx(β));
cz(β)=ƒ(Fz(β));
my(β)=ƒ(My(β)),
где сх - коэффициент позиционной гидродинамической силы по оси ОХ;
Fx - компонента позиционной гидродинамической силы по оси ОХ;
cz - коэффициент позиционной гидродинамической силы по оси OZ;
Fz - компонента позиционной гидродинамической силы по оси OZ;
my - коэффициент позиционного гидродинамического момента относительно оси OY;
Му - компонента позиционного гидродинамического момента относительно оси OY, затем эти позиционные гидродинамические характеристики используют при компьютерном моделировании для прогнозирования движения корабля в условиях сложного маневрирования, отличающийся тем, что после формирования трехмерной электронной модели корабля вводят связанную с ней систему координат с началом в точке О, ось ОХ направляют в нос трехмерной электронной модели корабля, OY - вверх, OZ - на правый борт, при этом на входной по отношению к потоку границе расчетной области направление вектора скорости потока последовательно задают в соответствии с возможными угловыми перемещениями корабля относительно потока по углам дрейфа β.
| Способ определения позиционных гидродинамических характеристик корабля | 2020 |
|
RU2746472C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ ГИДРОДИНАМИЧЕСКОЙ СИЛЫ И ЕЕ МОМЕНТА ПРИ ВЫПОЛНЕНИИ СЛОЖНОГО МАНЕВРИРОВАНИЯ СУДНА | 2012 |
|
RU2500572C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ ГИДРОАКУСТИЧЕСКОЙ СОВМЕСТИМОСТИ КОРАБЕЛЬНЫХ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2019 |
|
RU2724112C1 |
| WO 2012171951 A1, 20.12.2012 | |||
| WO 03045778 A1, 05.06.2003 | |||
| FR 3052741 A1, 22.12.2017. | |||

