Изобретение относится к медицинскому устройству для обработки и/или исследования ткани, содержащему эндоскоп и направляемый посредством эндоскопа инструмент.
Из уровня техники известны устройства, которые включают в себя эндоскоп, через рабочий канал которого инструмент простирается за пределы дистального конца эндоскопа, причем инструмент направлен в рабочем канале с возможностью его продольного перемещения. DE 10334100 А1, например, описывает эндоскоп для такой цели с изгибаемым участком рабочего канала.
Из DE 102006054218 А1 известен эндоскоп, через рабочий канал которого простирается направляющая проволока, причем на дистальном конце в направляющем канале расположен присоединенный к направляющей проволоке окклюдер, который для запечатывания разреза может быть выдвинут посредством направляющей проволоки из направляющего канала.
В других устройствах инструмент направлен снаружи от эндоскопа.
В раскрытом в ЕР 3141203 А1 устройстве, например, абляционный инструмент его стволом инструмента простирается через люмен шланговой оболочки, которая обеспечивает другой люмен, через который простирается эндоскоп. Кроме того, абляционный инструмент простирается через оправку, которая закреплена на дистальном конце ствола эндоскопа. Абляционный инструмент направлен в люмене шланговой оболочки и в оправке с возможностью перемещения вдоль ствола эндоскопа.
Из DE 102010020220 А1 известна направляющая гильза, которая может быть закреплена на продольной стороне ствола эндоскопа для направления через направляющую гильзу эндоскопических инструментов рядом с эндоскопом.
DE 202009009342 U1 описывает эндоскоп с гибким стволом эндоскопа, на продольной стороне которого расположен надувной шланг.
Целью данного изобретения является обеспечение усовершенствованного медицинского устройства с эндоскопом и с направляемым посредством эндоскопа инструментом.
Эта цель достигнута в предлагаемом в изобретении медицинском устройстве, охарактеризованном в пункте 1 формулы изобретения.
Предлагаемое в изобретении медицинское устройство для обработки и/или исследования ткани (далее - устройство) содержит эндоскоп со стволом, причем ствол содержит по меньшей мере один рабочий канал. Рабочий канал оканчивается на одной торцевой стороне (стороне выхода) ствола, предпочтительно на торце эндоскопа. Предпочтительно, ствол выполнен гибким. Устройство также содержит по меньшей мере один инструмент, который расположен проходящим рядом со стволом. Устройство выполнено таким образом, что дистальный конечный участок инструмента, который содержит рабочий участок инструмента, является перемещаемым вдоль ствола за пределы стороны ствола, на которой оканчивается рабочий канал, что обеспечивает возможность перемещения рабочего участка инструмента в область напротив стороны ствола (перед ней) для работы с помощью рабочего участка в этой области при эндоскопическом применении устройства. Предпочтительно, обзор области обеспечен с помощью средства эндоскопа для передачи изображений. Инструмент находится в зацеплении с направляющим элементом, что обеспечивает возможность направления рабочего участка инструмента посредством направляющего элемента при перемещении конечного участка за пределы стороны ствола в указанную область. Для направления участка инструмента, направляющий элемент во время перемещения дистального конечного участка за пределы стороны ствола простирается через рабочий канал. Предпочтительно, направляющий элемент направлен в рабочем канале с возможностью продольного перемещения, что обеспечивает возможность образования с помощью ствола телескопической направляющей для рабочего участка, расположенного вдоль продольной стороны ствола инструмента.
Направление инструмента посредством направляющего элемента подразумевает, что направляющий элемент таким образом подвижно соединен с инструментом, что инструмент при перемещении направленного с возможностью продольного перемещения в рабочем канале направляющего элемента перемещается совместно с направляющим элементом и/или, что направляющий элемент при перемещении инструмента вдоль ствола перемещается совместно с инструментом, причем направленный с возможностью продольного перемещения в рабочем канале направляющий элемент передает инструменту направленность направляющего элемента в рабочем канале. Альтернативно или дополнительно, под направлением инструмента посредством направляющего элемента согласно изобретению подразумевается, что на направляющем элементе расположена направляющая для направления инструмента вне рабочего канала, причем направляющая, предпочтительно, расположена напротив той стороны, на которой рабочий канал выходит из ствола, и причем инструмент находится в зацеплении с направляющей.
Устройство согласно изобретению обеспечивает более устойчивое по сравнению с известными устройствами направление расположенного снаружи от эндоскопа инструмента и, тем самым, например, плавное позиционирование и/или выравнивание рабочего участка инструмента в области, в которой с помощью инструмента должна быть произведена работа, например, относительно обрабатываемой с помощью инструмента и/или исследуемой ткани. Это расширяет возможности пользователя по управлению инструментом, в частности по его отклонению в сторону, и облегчает обращение с ним.
Предпочтительно, устройство согласно изобретению может быть усовершенствовано посредством по меньшей мере одного из описанных в последующем признаков.
Предпочтительно, устройство выполнено таким образом, что направляющий элемент может быть выдвинут вдоль рабочего канала в дистальном направлении и/или задвинут обратно в проксимальном направлении и/или, что направляющий элемент может быть повернут в рабочем канале, причем перемещение направляющего элемента передают на инструмент посредством подвижного сочленения направляющего элемента с инструментом. При этом направляющий элемент для перемещения инструмента с помощью направляющего элемента может получать управление, предпочтительно, извне тела пациента, в то время как дистальный конец устройства с рабочим участком расположен в пределах тела.
Предпочтительно, инструмент подвижно соединен с направляющим элементом таким образом, что выдвижение направляющего элемента в рабочем канале в направлении продольной протяженности рабочего канала по направлению к стороне выхода преобразуется в перемещение рабочего участка инструмента от стороны выхода. Предпочтительно, выдвижение преобразуется в перемещение рабочего участка в направлении продольной протяженности рабочего канала от торца. Альтернативно или дополнительно, инструмент, предпочтительно, соединен с направляющим элементом таким образом, что обратное затягивание направляющего элемента в рабочем канале в направлении продольной протяженности рабочего канала по направлению к проксимальному концу устройства преобразуется в обратное перемещение рабочего участка инструмента по направлению к стволу. Рабочий участок, предпочтительно, является выдвигаемым и/или вытягиваемым в дистальном направлении посредством приложения усилия к направляющему элементу. Дополнительно или альтернативно, рабочий участок, предпочтительно, является обратно задвигаемым и/или затягиваемым в проксимальном направлении посредством приложения усилия к направляющему элементу.
Предпочтительно, устройство выполнено так, что направляющий элемент является вращательно подвижным в рабочем канале вокруг продольной оси направляющего элемента, причем за счет соединения направляющего элемента с инструментом, вращательное перемещение может быть передано на рабочий участок для перемещения рабочего участка вокруг оси и/или ее углового смещения. Рабочий участок инструмента, предпочтительно, посредством направляющего элемента может быть приведен к вращению и/или угловому смещению вокруг продольной оси направляющего элемента. Альтернативно или дополнительно, инструмент подвижно соединен с направляющим элементом таким образом, что рабочий участок инструмента получает угловое смещение, когда выступающая из ствола, отстоящая от стороны выхода участок направляющего элемента получает угловое смещение относительно ствола напротив торца вокруг поперечной направлению продольной протяженности направляющего элемента оси.
Под направляющим элементом может подразумеваться гибкий направляющий пруток. Через направляющий элемент может простираться полость вдоль направляющего элемента. Соответствующим образом, направляющий элемент может содержать, например, гибкую трубку и/или шланг. Направляющий элемент может содержать, например, проволоку или проволочный пучок. Проволока или проволоки могут простираться вдоль рабочего канала. Альтернативно или дополнительно, направляющий элемент может содержать, например, проволочные спиральные нити. Направляющий элемент может состоять, например, из полимера и/или металла.
Под по меньшей мере одним из направляемых посредством направляющего элемента инструментов может подразумеваться, например, пробоотборный инструмент и/или наносящий инструмент для нанесения жидкости, газа и/или твердых веществ на ткань и/или в ткань, отсасывающий инструмент и/или хирургический режущий инструмент и/или коагулирующий инструмент. Под по меньшей мере одним из направляемых посредством направляющего элемента, расположенных простирающимся сбоку рядом со стволом инструментов может подразумеваться, альтернативно или дополнительно, измерительный инструмент для регулирования, управления, измерения или регистрации параметров ткани. Альтернативно или дополнительно, направленный посредством направляющих элементов инструмент может служить, например, для передачи энергии на дистальный конец устройства.
Под по меньшей мере одним из направляемых посредством направляющего элемента инструментов может подразумеваться, например, коагуляционный зонд, хирургический зонд для подачи струи жидкости для подъема (элевации) ткани посредством введения жидкости под ткань, криозонд, например криозонд для примораживания и изъятия пробы ткани, биопсийные щипцы, инъекционная игла, захват для инородных тел и/или камней, щетка и/или отсасывающий катетер.
Функция направляющего элемента может быть ограничена обеспечением направления для одного или нескольких инструментов, которые находятся в зацеплении с направляющим элементом, и/или передачей перемещений на один или несколько инструментов, которые находятся в зацеплении с направляющим элементом. Альтернативно, направляющий элемент как таковой является медицинским инструментом. Прежде всего, направляющий элемент может иметь собственный рабочий участок направляющего элемента. Например, через направляющий элемент может простираться канал для линии подачи жидкости, газа и/или твердого вещества. Простирающийся через направляющий элемент канал может быть предназначен для отсасывания жидкости, газа и/или твердого вещества от дистального конца канала и/или для транспортировки жидкости, газа и/или твердого вещества к дистальному концу и от дистального конца.
Предпочтительно, инструмент имеет по меньшей мере один функциональный элемент, который простирается рядом со стволом эндоскопа до рабочего участка эндоскопа. Функциональный элемент, предпочтительно, выполнен для направления и/или перемещения инструмента, прежде всего, его рабочего участка, и/или для приведения в действие инструмента и/или для передачи сред, таких как, например, жидкость, газ, твердое вещество и/или электрический ток к рабочему участку и/или от рабочего участка. Функциональный элемент выполнен, предпочтительно, таким образом, что пользователь устройства посредством функционального элемента имеет возможность перемещения и/или направления и/или управления и/или снабжения инструмента, причем обращение с инструментом и/или снабжение инструмента посредством функционального элемента, предпочтительно, может быть произведено извне тела пациента, в то время как рабочий участок инструмента расположен в теле пациента.
Предпочтительно, дополнительно к направлению посредством направляющего элемента, на продольной стороне ствола расположена направляющая, которая выполнена для направления инструмента вдоль продольной стороны ствола. Направляющая находится в зацеплении с инструментом, предпочтительно с простирающимся до рабочего участка инструмента вдоль ствола функциональным элементом инструмента. Предпочтительно, функциональный элемент направлен на стволе посредством по меньшей мере одного оперативно расположенного между продольной стороной ствола и инструментом направляющего держателя. Направляющий держатель может быть закреплен, например, на стволе. Альтернативно, направляющий держатель закреплен, например, на функциональном элементе. Под направляющим держателем может подразумеваться, например, направляющее кольцо, которое закреплено на стволе или на функциональном элементе, и через которое простираются ствол и/или функциональный элемент.
Направляющий элемент, предпочтительно, имеет по меньшей мере один зацепляющий участок для соединения направляющего элемента с инструментом. Предпочтительно, направляющий элемент выполнен для соединения с двумя или большим количеством инструментов. Направляющий элемент, предпочтительно, имеет по одной зацепляющего участка для двух или нескольких инструментов.
Альтернативно или дополнительно, на направляющем элементе может быть закреплен зацепляющий элемент,
причем направляющий элемент посредством зацепляющего элемента может быть соединен по меньшей мере с одним инструментом.
Предпочтительно, инструмент находится в зацеплении с зацепляющим элементом и/или с зацепляющим участком таким образом, что инструмент направлен в зацепляющем элементе и/или в зацепляющем участке с возможностью перемещения относительно зацепляющего элемента и/или зацепляющего участка. За счет этого направляющий элемент, предпочтительно, посредством зацепляющего элемента и/или посредством зацепляющего участка, обеспечивает направление для инструмента вне ствола напротив стороны выхода, из которой направляющий элемент выходит из ствола.
Предпочтительно, зацепляющий элемент и/или зацепляющий участок имеет подходящую к внешней форме дистального конца ствола форму и/или подходящую к расположенному на дистальном конце ствола удерживающему элементу форму таким образом, что при нахождении подходящей формы в зацеплении с внешней формой зацепляющий элемент и/или зацепляющий участок получает заданную ориентацию и/или заданное положение относительно дистального конца ствола и/или относительно удерживающего элемента. Например, на дистальном конце ствола расположена и/или выполнена оправка для зацепляющего элемента и/или зацепляющего участка, причем зацепляющий элемент и/или зацепляющий участок являются подвижными в осевом направлении в оправке, и причем поворотная подвижность зацепляющего элемента и/или зацепляющего участка в оправке является ограниченной. Предпочтительно, устройство выполнено таким образом, что внешняя форма и подходящая форма при обратном перемещении зацепляющего участка и/или зацепляющего элемента по направлению к стволу автоматически входят в зацепление.
Зацепление между направляющим элементом и инструментом, предпочтительно, является разъемным неразрушающим образом. Наиболее предпочтительно, устройство выполнено таким образом, что зацепление между направляющим элементом и инструментом является разъемным неразрушающим образом извне тела пациента и/или, что разъемное неразрушающим образом зацепление между направляющим элементом и инструментом может быть создано извне тела пациента, когда дистальный конец устройства с рабочим участком расположен в теле пациента.
На дистальном конце ствола, предпочтительно, закреплен направляющий держатель, который обеспечивает направление вдоль ствола простирающимся вдоль ствола инструментам. Для этого направляющий держатель, предпочтительно, имеет гнезда, в которых, в каждом случае по одному, инструменты направлены с возможностью перемещения, предпочтительно, с возможностью перемещения вдоль продольной протяженности дистального конца ствола. Устройство, предпочтительно, выполнено так, что в каждом случае обеспечена возможность приведения в зацепление с направляющим элементом одного или нескольких инструментов, что позволяет перемещать их посредством направляющего элемента, в то время как по меньшей мере один другой расположенный в его гнезде инструмент находится вне зацепления с направляющим элементом.
Предпочтительно, направляющий элемент для размещения по меньшей мере двух инструментов, которые расположены проходящими рядом со стволом, выполнен таким образом, что рабочий участок по меньшей мере одного из направляемых инструментов является перемещаемым относительно рабочего участка другого инструмента с помощью направляющего элемента. Альтернативно или дополнительно, направляющий элемент для размещения по меньшей мере двух инструментов, которые расположены проходящими рядом со стволом, предпочтительно, выполнен таким образом, что рабочий участок по меньшей мере одного из направляемых инструментов является вращаемым и/или поворачиваемым относительно рабочего участка другого инструмента посредством направляющего элемента. Предпочтительно, устройство для управления направляющим элементом выполнено для продольного перемещения, вращения и/или углового смещения одного из инструментов относительно другого инструмента извне тела пациента, когда рабочие участки инструментов расположены в теле пациента.
Согласно изобретению, обеспечивается также направляющий элемент, который выполнен для применения в устройстве согласно изобретению, например, как оно описано в настоящем документе.
Другие выгодные признаки устройства согласно изобретению получаются из последующего описания, чертежей, а также зависимых пунктов формулы изобретения.
Описание чертежей
Схематически показано на:
Фиг. 1А-1Г - фрагментарные перспективные виды вариантов осуществления устройства согласно изобретению,
Фиг. 1Д - другой вариант осуществления устройства согласно изобретению во фрагментарном перспективном представлении,
Фиг. 2А - фрагментарное перспективное представление другого варианта осуществления устройства согласно изобретению с закрепленным на эндоскопе направляющим держателем с гнездами для инструментов,
Фиг. 2Б - фрагментарное перспективное представление варианта осуществления расположения эндоскопа и направляющего элемента примерного устройства согласно изобретению, причем с помощью направляющего элемента могут быть перемещены друг относительно друга по меньшей мере два сообщенных посредством направляющего элемента инструмента,
Фиг. 2В - вариант осуществления устройства согласно изобретению во фрагментарном перспективном представлении с направляющим элементом и перемещаемым относительно него инструментом,
Фиг. 3А-3Г - перспективные представления различных вариантов соединения направляющего элемента с зацепляющим элементом или же инструментом,
Фиг. 4 - примерная рукоятка для устройства согласно изобретению.
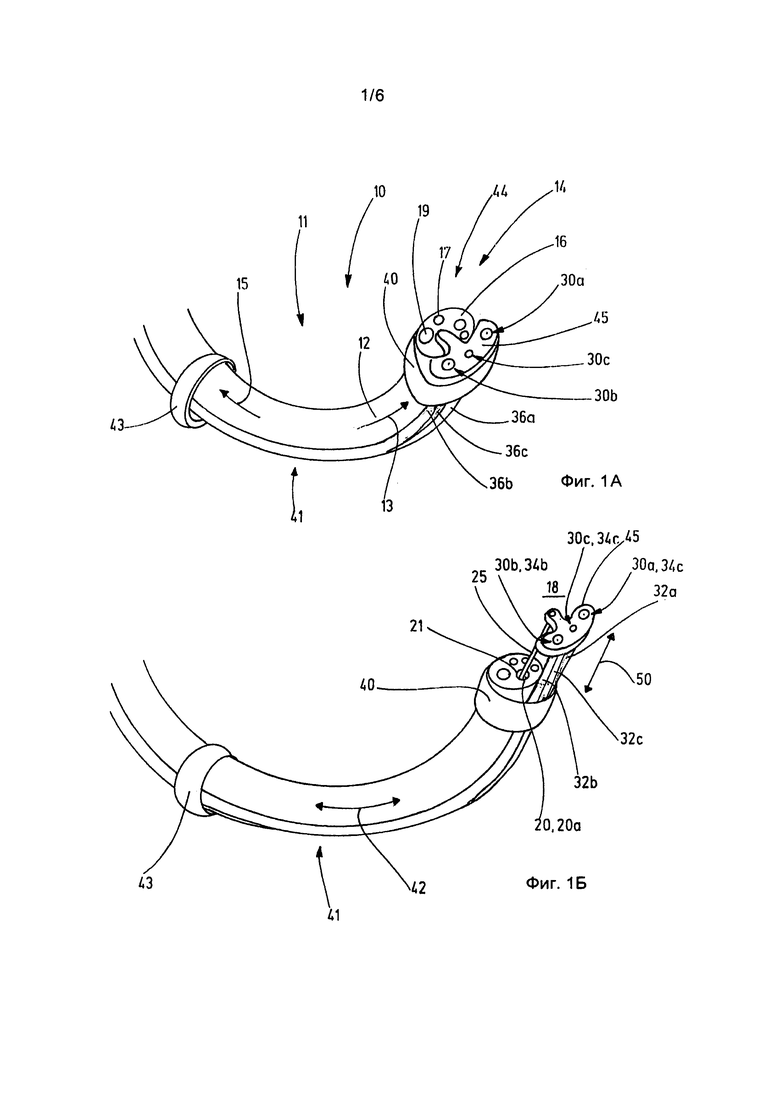
Фиг. 1А, 1Б показывают примерный вариант осуществления устройства 10 согласно изобретению на фрагментарном перспективном виде. Устройство 10 имеет эндоскоп 11 с гибким стволом 12. Ствол 12 задает дистальное направление 13 (ориентацию), вдоль которого простирается ствол 12 от его проксимального конца (не представлено) до его дистального конца 14. Наоборот, ствол 12 задает проксимальное направление 15 от его дистального конца 14 вдоль ствола 12 до его проксимального конца. На торце 16 ствола 12 на его дистальном конце 14 расположен осветительный узел 17 для освещения области 18 напротив торца 16 ствола 12. Средство для передачи изображения простирается через ствол 12 до входа 19 средства в торце 16, на котором может быть расположен, например, принадлежащий средству для передачи изображений объектив. Средство выполнено для передачи изображения исследуемой и/или обрабатываемой области 18 напротив торца 16 ствола 12, что обеспечивает возможность визуального наблюдения извне тела пациента посредством эндоскопа 11 за исследованием и/или за обработкой в области 18 перед торцом 16. Через ствол 12 до торца 16 могут простираться и другие линии для передачи в проксимальном направлении и/или дистальном направлении, например, сигналов, электрической мощности, газов, жидкостей или твердых веществ. Через ствол 12 до отверстия 21 в торце 16 ствола 12, во всяком случае, простирается по меньшей мере один рабочий канал 20. Через такой рабочий канал 20 в устройстве 10 может быть выдвинут наружу из торца 16 ствола 12, например, инструмент, такой как, например, рабочий орган, например захват, для выполнения с его помощью в области 18 с помощью средства для передачи изображений под визуальным контролем оператора исследования и/или обработки.
В устройстве 10 согласно изобретению (см., прежде всего, фиг. 1Б) через рабочий канал 20 простирается продолговатый направляющий элемент 25, который направлен в рабочем канале 20 в продольном направлении 26 рабочего канала 20 с возможностью перемещения. Направляющий элемент 25 выходит из рабочего канала 20 через отверстие 21 в торце (на стороне выхода). Направляющий элемент 25 простирается в проксимальном направлении 15, предпочтительно, до проксимального конца устройства 10 (не представлено на фиг. 1А, 1Б), где направляющий элемент 25 может быть приведен в действие, прежде всего, перемещен посредством оператора.
Устройство 10 согласно изобретению содержит по меньшей мере один инструмент 30, который простирается рядом со стволом 12 вдоль ствола 12. В представленном варианте осуществления устройству 10 согласно изобретению принадлежат первый 30а и второй 30b инструменты, под которыми могут соответственно подразумеваться коагуляционные зонды соответственно по меньшей мере с одним электродом для зажигания плазмы, а также третий инструмент 30с, под которым может подразумеваться, например, водоструйный зонд. Инструменты 30а, 30b, 30с соответственно имеют дистальный конечный участок 32а-с с рабочим участком 34а-с на дистальных концах инструментов 30а, 30b, 30с.
К рабочему участку 34а-с на каждом инструменте 30а, 30b, 30с вдоль ствола 12 простирается по меньшей мере один функциональный элемент 36а-с. Простирающиеся сбоку рядом со стволом 12 функциональные элементы 36а-с могут быть выполнены к направлению и/или перемещению соответствующего инструмента 30а-с или же рабочего участка 34а-с и/или к приведению в действие инструмента 30а-с и/или для передачи сред к рабочему участку 34а-с инструмента 30а-с и/или от рабочего участка 34а-с на дистальном конце инструмента 30а-с. Пользователь устройства, 10, например, имеет возможность перемещения инструмента 30а-30 с, его направления, снабжения и/или управления им посредством функционального элемента 36а-с. Когда под первым и вторым инструментом 30а, 30b подразумевают зонд аргоноплазменной коагуляции, первый инструмент 30а и второй инструмент 30b может иметь в качестве функционального элемента 36а, 36b, например, соответственно шланг, через который соответственно простирается электрическая линия, которая соединена с электродом, причем через шланг газ аргона может быть проведен к рабочему участку 34а, 34b зонда аргоноплазменной коагуляции, который с помощью его электрода обеспечивает зажигание аргонной плазмы перед дистальным концом зонда аргоноплазменной коагуляции. Когда под третьим инструментом 30 с, как в представленном варианте осуществления, подразумевают зонд для подачи струи жидкости, он в качестве функционального элемента 36 с имеет, например, шланг, который присоединен к горловине зонда для подачи струи жидкости в рабочего участка 34 с зонда на его дистальном конце, и который служит для подачи жидкости к горловине.
Функциональные элементы 36а-с инструментов 30а-с простираются в представленном варианте осуществления через закрепленную на дистальном конце 14 ствола 12 направляющую манжету 40, которая образует прикрепленный на продольной стороне 41 ствола 12 первый направляющий держатель 40 устройства 10 для направления инструментов 30а, 30b, 30с снаружи на стволе 12 в направлении продольной протяженности 42 ствола 12. В проксимальном направлении 15 от дистального конца 14 и с отстоянием от первого направляющего держателя 40, функциональные элементы 36а-с простираются через расположенный на продольной стороне 41 ствола 12 второй направляющий держатель 43, который выполнен для направления функциональных элементов 36а-с на продольной стороне 41 ствола 12. Под вторым направляющим держателем 43 может подразумеваться, например, кольцо, которое охватывает ствол 12 и/или функциональные элементы 36а-с. Второй направляющий держатель 43 может быть зафиксирован на стволе 12 против его осевого перемещения вдоль ствола 12 или он может быть зафиксирован на функциональном элементе 36а-с против осевого перемещения второго направляющего держателя 43 относительно функционального элемента 36а-с. Дополнительно к обоим представленным примерным направляющим держателям 40, 43 для направления расположенного или расположенных простирающимися сбоку рядом со стволом 12 инструментов 30а, 30b, 30с, снаружи на стволе 12 может быть размещен по меньшей мере один другой направляющий держатель (не представлен) для направления расположенного или расположенных простирающимися сбоку вдоль ствола 12 инструментов 30а, 30b, 30с. Также являются возможными варианты осуществления только с одним расположенным между продольной стороной 41 ствола 12 и инструментом или инструментами 30а, 30b, 30с оперативным направляющим держателем для направления инструментов 30а, 30b, 30с на стволе вдоль продольной стороны 41 ствола 12.
Расположенный на дистальном конце 14 ствола 12 первый направляющий держатель 40 может образовывать элемент скольжения, посредством которого устройство 10 прилегает к участку ткани для облегчения соблюдения заданного зазора между тканью и рабочим участком по меньшей мере одного инструмента 30а, 30b, 30с.
Дополнительно или альтернативно к первому и/или второму направляющим держателям 40, 43, устройство 10 может иметь пленочный рукав (не представлен), причем ствол 12 и функциональные элементы 36а-с простираются через пленочный рукав, и причем пленочный рукав, предпочтительно, обеспечивает люмен для ствола 12, а также отдельный от него люмен для функциональных элементов 36а-с, и причем функциональные элементы 36а-с направлены в стволе 12 эндоскопа 11 в люмене для функциональных элементов 36а-с. Дополнительно, пленочный рукав может служить для отсасывания дыма.
Инструменты 30а-с соединены на дистальном конце 44 устройства 10 с направляющим элементом 25, который простирается через рабочий канал 20, с зацепляющим участком направляющего элемента 25 и/или с соединенным с направляющим элементом 25 зацепляющим элементом 45 таким образом, что во время перемещения направленного в рабочем канале 20 направляющего элемента 25 инструменты 30а, 30b, 30с, при перемещении рабочего участка 34а-с, получают направление от торца 16 ствола 12 в область напротив торца 16 (перед ним), и/или назад к торцу 16 из области 18 наружу. Для этого участок направляющего элемента 25, который выступает в дистальном направлении из торца 16, и который простирается вплоть до рабочего канала 20, выполнен жестким на изгиб или, предпочтительно, упругим на изгиб для направления инструментов 30а, 30b, 30с.
Устройство 10 выполнено таким образом, что силы реакции, возникающие в результате направления инструментов 30а, 30b, 30с посредством направляющего элемента 25, отводятся через ограничивающие канал 20, охватывающие канал 20 стенные поверхности на ствол 12. Соответственно, направляющий элемент 25 является опираемым в пределах рабочего канала 20 на ствол 12 и, тем самым, сообщает расположенным рядом со стволом 12 инструментам 30а, 30b, 30 с направление направляющего элемента 25 в рабочем канале 20. То есть, инструмент направлен по отношению к стороне 16 выхода извне рабочего канала 20, опосредованно через направляющий элемент 25, с помощью рабочего канала 20. ствол 12 и направляющий элемент 25 соответственно образуют телескопическую направляющую для рабочих участков 34а-с расположенных простирающимися вдоль продольной стороны 41 ствола 12 инструментов 30а, 30b, 30с. Поскольку в устройстве 10 согласно изобретению рабочий канал 20 использован для сообщения через направляющий элемент 25 направления рабочим участком 34а-с по отношению к стороне 16 выхода, рабочего участка 34а-с перед стороной 16 выхода обеспечена возможность более устойчивого и, тем самым, более надежного и плавного направления по сравнению с известными устройствами.
Устройство 10 согласно изобретению, предпочтительно, выполнено таким образом, что пользователь может передавать посредством направляющего элемента 25 усилие на рабочие участки 34а-с в направлении движения для перемещения рабочих участков 34а-с инструментов 30а, 30b, 30с в область 18 напротив торца 16 и/или из области 18 наружу. Предпочтительно, устройство 10 выполнено таким образом, что пользователь может управлять направляющим элементом 25 с помощью рукоятки (не представлена на фиг. 1А, 1Б, см., например, фиг. 4) устройства 10, например, выдвигать его в дистальном направлении 13 для передачи усилия на инструменты 30а, 30b, 30с для перемещения рабочих участков 34а-с в область 18 и/или из области 18 наружу вдоль направляющего элемента 25. Устройство 10 выполнено таким образом посредством того, что пользователь может управлять направляющим элементом 25 извне тела пациента для приложения усилия посредством направляющего элемента 25 для выталкивания и/или затягивания инструментов 30а, 30b, 30с в область 18 вперед и/или из области 18 назад. При выталкивании и/или затягивании инструментов 30а, 30b, 30с посредством направляющего элемента 25 может потребоваться выдвигание или обратное затягивание функциональных элементов 36а-с (линий подачи) инструментов 30а, 30b, 30с извне тела пациента.
Для достижения непосредственной передачи толкающего перемещения приводимого в действие участка 48 направляющего элемента 25, например, от рукоятки на один или несколько инструментов 30а, 30b, 30с, направляющий элемент 25, предпочтительно, выполнен жестким под давлением и, предпочтительно, соединен жестким под давлением образом с рабочим участком 34а-с инструмента 30а, 30b, 30с. Кроме того, направляющий элемент 25, который образует собой толкающий компонент, который, предпочтительно, направлен в рабочем канале 20 жестким на изгиб образом.
Для достижения непосредственной передачи тянущего перемещения направляющего элемента 25 от рукоятки на инструмент 30а, 30b, 30с, направляющий элемент 25, предпочтительно, выполнен жестким при натяжении и, предпочтительно, соединен с рабочим участком 34а, 34b, 34с инструмента 30а, 30b, 30с жестким при натяжении образом.
Конечный участок 20а рабочего канала 20 на отверстии 21 в торце 16 задает своим направлением продольной протяженности направленность 50 для направляющего элемента 25 и, тем самым, рабочих участков 34а, 34b, 34с инструментов 30а, 30b, 30с, вдоль которой направляющий элемент 25 и, тем самым, также рабочие участки 34а, 34b, 34 с инструментов 30а, 30b, 30с получают направление от торца 16 в область 18 и обратно. Дистальные конечные участки 32а-с инструментов 30а, 30b, 30с, как показано на фиг. 1Б, являются перемещаемыми в направленности 50 вдоль направления продольной протяженности от дистального конечного участка рабочего канала 20 посредством приложения усилия к направляющему элементу 25 на дистальном конце 14 ствола 12 (выдвигаемым и/или вытягиваемым образом) и/или являются обратно перемещаемыми в противоположном направлении, к дистальному концу 14 ствола 12 (задвигаемым обратно и/или затягиваемым обратно образом).
Альтернативно или дополнительно к приложению усилия к направляющему элементу 25 для перемещения простирающихся рядом с продольной стороной 41 ствола 12 инструментов 30а, 30b, 30с, устройство 10 может быть выполнено таким образом, что усилие в направленности 50 для перемещения инструментов вдоль направления продольной протяженности конечного участка рабочего канала 20 передается на рабочие участки 34а-с инструментов 30а, 30b, 30с, целиком или частично, посредством по меньшей мере одного из функциональных элементов 36а-с. В таких случаях, пользователь имеет возможность выдвижения, например, функциональных элементов 36а-с вдоль ствола 12 в дистальном направлении 13 для перемещения участков 32а-с инструментов 30а, 30b, 30с совместно с их рабочими участками 34а, 34b, 34с за пределы торцевой стороны 16 по направлению к области 18, в которой должна быть произведена работа с помощью рабочих участков 34а-с.
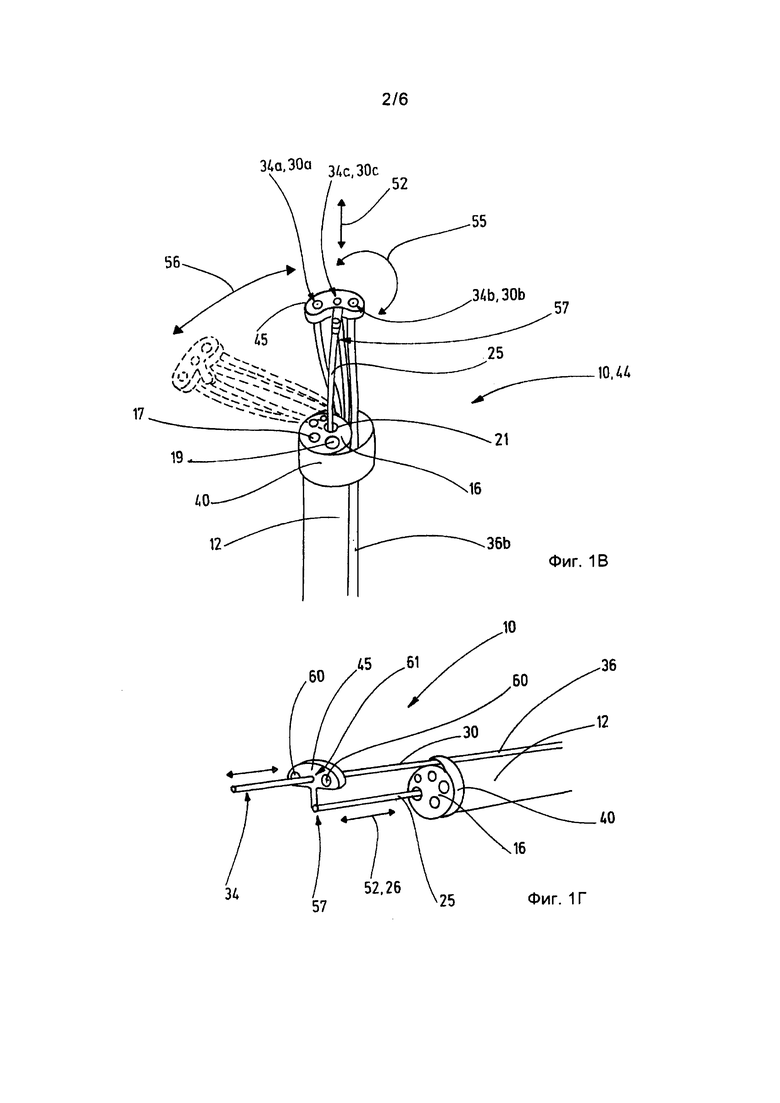
Фиг. 1В показывает вариант осуществления устройства 10 согласно изобретению, которое, в качестве примера, выполнено таким образом, что рабочим участком 34а-с обеспечена возможность вращения и/или получения углового смещения вокруг простирающейся вдоль направления 52 продольной протяженности направляющего элемента 25 через направляющий элемент 25 оси относительно ствола 12, что обозначено посредством двойной стрелки 55.
Это включает в себя также вращение и/или угловое смещение с углом вращения и/или углом углового смещения между начальным положением и конечным положением, который не достигает 360°. Устройство 10, предпочтительно, выполнено так, что для вращения и/или углового смещения, на рабочие участки 34а, 34b, 34с может быть передан крутящий момент посредством направляющего элемента 25. Предпочтительно, направляющим элементом 25 можно управлять для вращения рабочих участков 34а, 34b, 34с и/или для их углового смещения извне тела пациента, когда дистальный конец 44 устройства 10 расположен в люмене тела.
Для этого направляющий элемент 25, предпочтительно, является ограниченным по меньшей мере в одном направлении вращения, или является в обоих направлениях вращения жестким на кручение, что позволяет достигать непосредственной передачи вращательного движения от направляющего элемента 25 к инструментам 30а, 30b, 30с.
Как показано на фиг. 1В посредством двойной стрелки 56 и пунктирного представления выступающего из отверстия 21 участка направляющего элемента 25, зацепляющего элемента 45 и инструментов 30а, 30b, 30с в положении углового смещения, расположенные напротив торца 16 рабочие участки 34а, 34b, 34с, в примерном варианте осуществления, имеют возможность углового смещения относительно дистального конца 14 ствола вокруг простирающейся поперечно, например перпендикулярно, направляющему элементу 25 оси, что позволяет осуществлять изменение ориентации расположенных напротив торца 16 рабочих участков 34а, 34b, 34с. Предпочтительно, устройство 10 выполнено таким образом, что для углового смещения крутящий момент может быть передан на инструменты 30а, 30b, 30с посредством направляющего элемента 25. Например, направляющий элемент 25 может содержать одну или нескольких соединенных с дистальным концом 57 направляющего элемента 25 проволок (не представлены), которые простираются до манипуляционного участка устройства, например до рукоятки устройства, таким образом, что пользователь устройства 10 имеет возможность управления проволоками извне тела пациента, когда дистальный конец 44 устройства 10 расположен в пределах люмена тела пациента. Направляющий элемент 25 может быть образован, например, из пустотелой упругой на изгиб трубы, причем проволоки могут простираться через трубу от проксимального конца устройства 10 до дистального конца 57 направляющего элемента 25.
Фиг. 1Г показывает другой вариант осуществления устройства 10 согласно изобретению с соединенным с направляющим элементом 25 зацепляющим элементом 45, который может иметь по меньшей мере одно гнездо 60 для инструмента для соединения инструмента посредством зацепляющего элемента 45 с направляющим элементом 25 таким образом, что приложенное к направляющему элементу 25 в направлении продольной протяженности направляющего элемента 25 усилие оказывается переданным на инструмент (в целях наглядности, в данном случае, не представлено). Зацепляющий элемент 45 имеет гнездо 61 для другого инструмента 30, которое выполнено для направления, предпочтительно, вдоль направления продольной протяженности 52 выступающего в дистальном направлении из отверстия участка направляющего элемента 25, с возможностью перемещения другого инструмента 30 в зацепляющем элементе 45 напротив торца 16 относительно направляющего элемента 25. Альтернативно соединенному с направляющим элементом 25 зацепляющему элементу 45, такое размещение для другого инструмента 30 также может обеспечивать зацепляющий участок направляющего элемента 25. Направляющий элемент 25 образует выступающую над торцом 16, удерживаемую в рабочем канале 20 направляющую консоль для перемещаемого относительно направляющего элемента 25 другого инструмента 30, и, совместно с зацепляющим элементом 45 или зацепляющим участком, обеспечивает направляющую для другого инструмента 30, который позиционирован напротив торца 16 (перед ним). Направляющий элемент 25 направлен с возможностью перемещения в рабочем канале 20 вдоль направления продольной протяженности рабочего канала 20 таким образом, что отстояние зацепляющего элемента 45 или зацепляющего участка и, тем самым, отстояние направляющей для другого инструмента 30 от торца 16 является изменяемым. Устройство 10 может быть выполнено таким образом, что усилие для перемещения рабочего участка 34 другого инструмента 30 относительно направляющего элемента 25 может быть приложено к рабочему участку 34 посредством функционального элемента 36 инструмента 30. Для этого функциональный элемент 36 может быть направлен рядом с продольной стороной ствола посредством направляющего держателя 40. Под другим инструментом 30 может подразумеваться, например, зонд для подачи струи жидкости. Такой зонд может быть выполнен для подачи жидкости под слой ткани для ее приподнимания. При этом дистальный конец зонда для подачи струи жидкости накладывают на ткань. В рамках примерного варианта осуществления устройства согласно изобретению дистальный конец зонда для подачи струи жидкости может быть наложен на ткань с отстоянием между зацепляющим элементом 45 и торцом 16. При помощи перемещаемого за пределы дистального конца направляющего элемента 25 от дистального конца 57 направляющего элемента 25 дистального рабочего участка 34 другого инструмента 30 обеспечена возможность продвижения также в тесный люмен тела пациента.
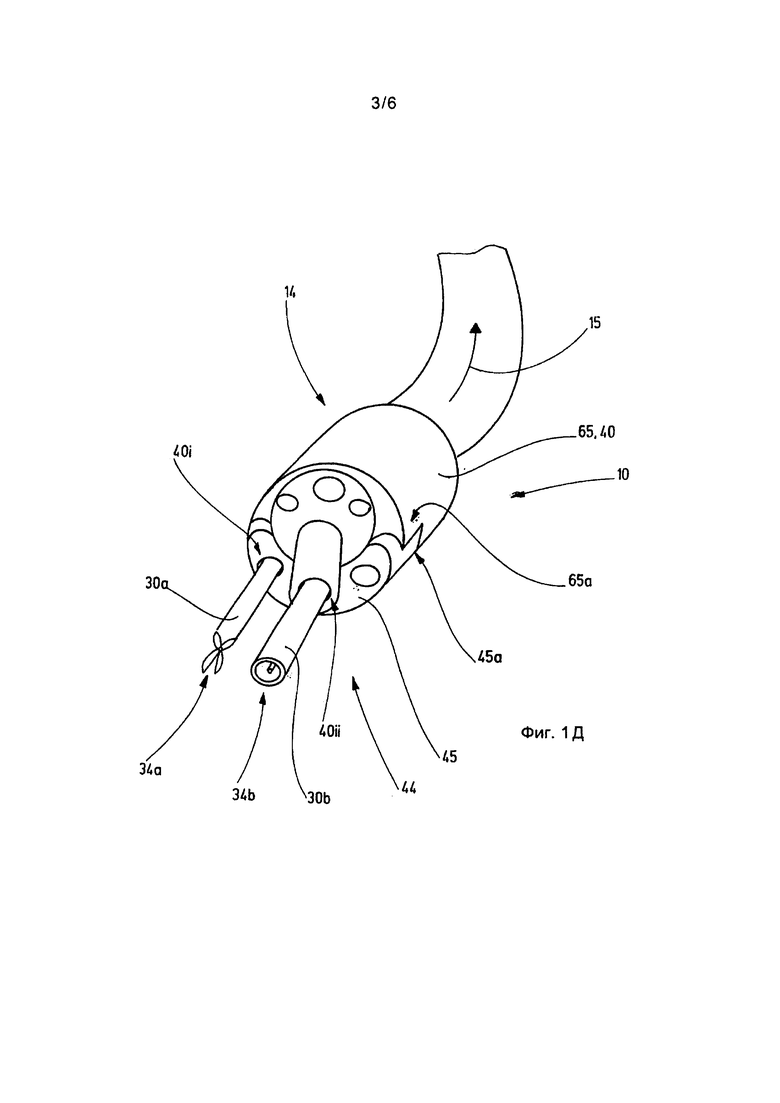
Фиг. 1Д является фрагментарным, перспективным представлением другого варианта осуществления устройства 10 согласно изобретению на виде на дистальный конец 44 устройства 10. На дистальном конце 14 ствола 12 закреплен удерживающий элемент 65 с участком геометрического замыкания 65а. Участок 65а геометрического замыкания имеет комплементарную участку 45а геометрического замыкания зацепляющего элемента 45 форму. На фиг. 1Д зацепляющий элемент 45 расположен в задвинутом обратно положении в стволе 12 таким образом, что участок 45а геометрического замыкания зацепляющего элемента 45 находится в зацеплении с участком 65а геометрического замыкания удерживающего элемента 65. Геометрическое замыкание обеспечивает, что зацепляющий элемент 45 расположен на удерживающем элементе 65 без возможности вращения вокруг ствола 12, и, что зацепляющий элемент 45 не имеет возможности дальнейшего обратного перемещения в проксимальном направлении 15 относительно дистального конца 14 ствола 12. Удерживающий элемент 65 тем самым задает предварительно назначенные ориентацию и положение зацепляющего элемента 45 в стволе 12 в задвинутом обратно положении. Удерживающий элемент 65 одновременно может образовывать собой направляющую для инструментов 30а, 30b на стволе. Например, под удерживающим элементом 65 может подразумеваться первый направляющий держатель 40 по меньшей мере с двумя отдельными гнездами 40i, 40ii, по одному на инструмент 30а, 30b. Инструмент 30а может иметь, например, рабочий участок 34а с захватом. Инструмент 30b может быть представлен, например, зондом аргоноплазменной коагуляции, то есть, рабочим участком 34b с электродом для производства аргонной плазмы.
В удерживающем элементе 65 и в зацепляющем элементе 45, предпочтительно, расположены (не представлены) направляющие и контрнаправляющие поверхности, которые при обратном затягивании зацепляющего элемента 45 в ствол 12 входят друг с другом в зацепление таким образом, что участок 45а геометрического замыкания зацепляющего элемента 45 автоматически оказывается в геометрическом замыкании с участком 65а геометрического замыкания закрепленного на дистальном конце 14 ствола 12 удерживающего элемента 65. Таким способом, положение и ориентация зацепляющего элемента 45 на стволе 12 может быть автоматически задана посредством удерживающего элемента 65, когда зацепляющий элемент 45 из выдвинутого положения напротив торца 16 перемещают обратно.
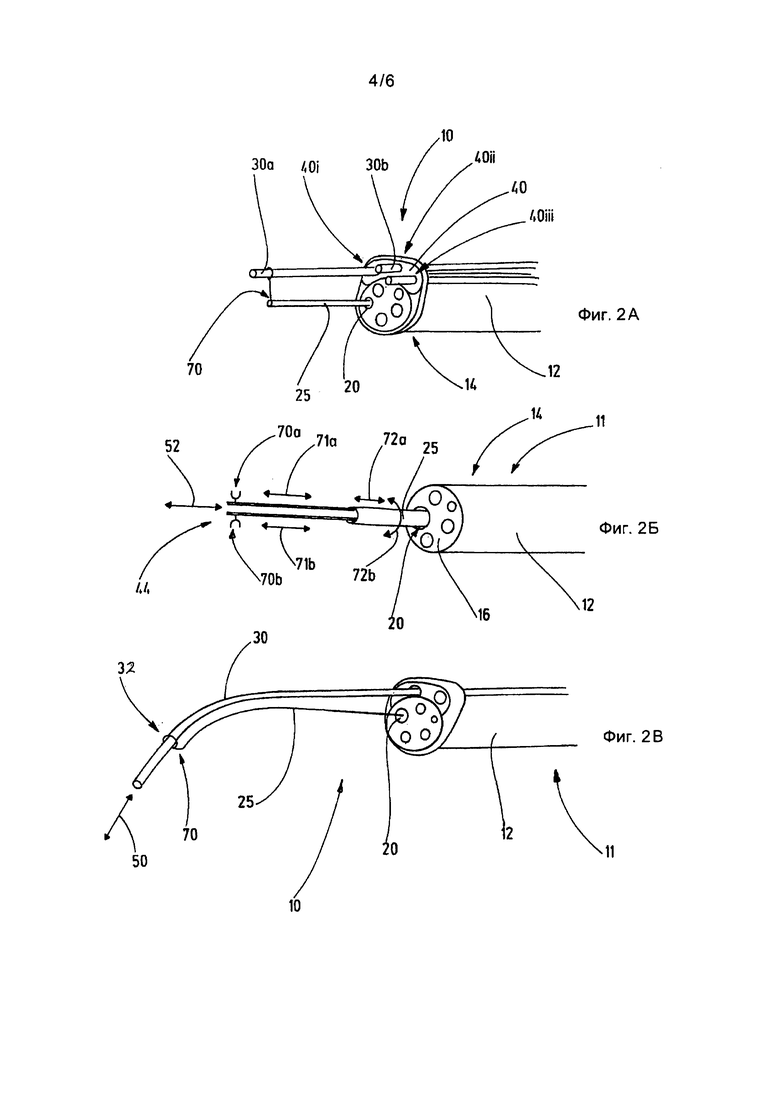
Фиг. 2А показывает в перспективном фрагментарном представлении примерный вариант осуществления устройства 10 согласно изобретению с закрепленным на дистальном конце 14 ствола 12 направляющим держателем 40, который имеет гнезда 40i, 40ii, 40iii, в которых могут быть направленно расположены по одному инструменты 30а, 30b, 30с. Инструменты 30а, 30b, 30с, предпочтительно, направлены в гнездах 40i, 40ii, 40iii вдоль направления продольной протяженности дистального конечного участка рабочего канала 20 с возможностью перемещения. Простирающийся через рабочий канал 20 направляющий элемент 25 имеет зацепляющий участок 70. Устройство 10 выполнено так, что направляющий элемент 25, посредством его зацепляющего участка 70, может быть избирательным образом соединен по меньшей мере с двумя из инструментов 30а, 30b, 30с, что обеспечивает соответственно соединенному с направляющим элементом 25 инструменту 30а направление в область 18 напротив торца 16, в которой должна быть произведена работа с помощью инструмента 30а, и/или выведение инструмента 30а из области 18 назад, ближе к торцу 16. Предпочтительно, устройство 10 выполнено таким образом, что направляющий элемент 25 может быть отсоединен от инструмента 30а для соединения направляющего элемента 25 с одним из числа других инструментов 30b, 30с для направления этого инструмента 30b, 30с в область 18 напротив торца 16, в которой в которой должна быть произведена работа с помощью инструмента 30b, 30с, и/или для выведения этого другого инструмента 30b, 30 с из области 18 напротив торца 16. Устройство 10, предпочтительно, выполнено так, что усилие вдоль направления продольной протяженности 52 направляющего элемента 25 для перемещения инструмента 30а, 30b, 30с в область 18 и/или усилие вдоль направления продольной протяженности 52 направляющего элемента 25 для перемещения из области 18 наружу передают на инструмент 30а, 30b, 30с посредством направляющего элемента 25. Устройство 10, предпочтительно, выполнено таким образом, что соединением инструмента 30а, 30b, 30с с направляющим элементом 25 и/или рассоединением инструмента 30а, 30b, 30с от направляющего элемента 25, предпочтительно, можно управлять извне тела пациента, в то время как дистальный конец 44 устройства 10 с рабочими участками 34а-с инструментов 30а, 30b, 30с расположен в пределах тела пациента.
Фиг. 2Б показывает перспективное фрагментарное представление примерного варианта осуществления эндоскопа 11 устройства 10 согласно изобретению с направленным в его рабочем канале 20, подвижным в продольном направлении направляющим элементом 25. Направляющий элемент 25 имеет два зацепляющих участка 70а, 70b, которые могут быть соединены соответственно по меньшей мере с одним инструментом, который простирается вдоль ствола 12, для направления его перед торцом 16 ствола 12. В целях наглядности на фиг. 2Б инструменты не представлены. Направляющий элемент 25 выполнен к тому, что рабочего участка 34а, 34b каждого из соединенных с зацепляющими участками 70а, 70b инструментов, как обозначено двойными стрелками 71а, 71b, обеспечена возможность перемещения относительно рабочего участка другого инструмента в направлении продольной протяженности 52 направляющего элемента 25. Кроме того, рабочие участки соединенных с зацепляющими участками 70а, 70b инструментов могут получать угловое смещение друг относительно друга посредством вращения и/или углового смещения зацепляющих участков 70а, 70b вокруг простирающейся вдоль направления продольной протяженности 52 направляющего элемента 25 оси, и/или могут быть повернуты вокруг простирающейся вдоль направления продольной протяженности 52 оси. Кроме того, устройство 10 выполнено так, что направляющий элемент 25 в своей совокупности может быть направленным образом выдвинут и задвинут обратно вдоль его продольной оси в рабочем канале 20, а также может быть повернут вокруг его продольной оси, как обозначено двойными стрелками 72а, b, для обеспечения возможности перемещения рабочих участков обоих инструментов соответствующим образом. Усилие для перемещения рабочих участков друг относительно друга и/или усилие для перемещения направляющего элемента 25 в своей совокупности, предпочтительно, может быть приложено к направляющему элементу 25 извне тела пациента, в то время как дистальный конец 14 ствола 12 расположен в теле пациента. За счет этого может быть изменено положение рабочего участка инструмента относительно другой рабочего участка извне тела пациента, в то время как дистальный конец 44 устройства 10 с рабочими участками расположен в пределах тела пациента.
Фиг. 2В показывает вариант осуществления устройства 10 согласно изобретению с направляющим элементом 25, который простирается через рабочий канал 20 ствола 12 эндоскопа 11, причем направляющий элемент 25 может иметь, например, изогнутый конечный участок, в котором расположен зацепляющий участок 70 направляющего элемента 25. В зацепляющем участке 70 дистальный конечный участок 32 инструмента 30 направлен с возможностью перемещения вдоль направленности 50, которую задает зацепляющий участок 70. Направленность 50 отклонена от направления продольной протяженности дистального конечного участка рабочего канала 20 для направления рабочего участка 34 инструмента 30 в область от параллельного продления средней оси дистального конечного участка рабочего канала 20.
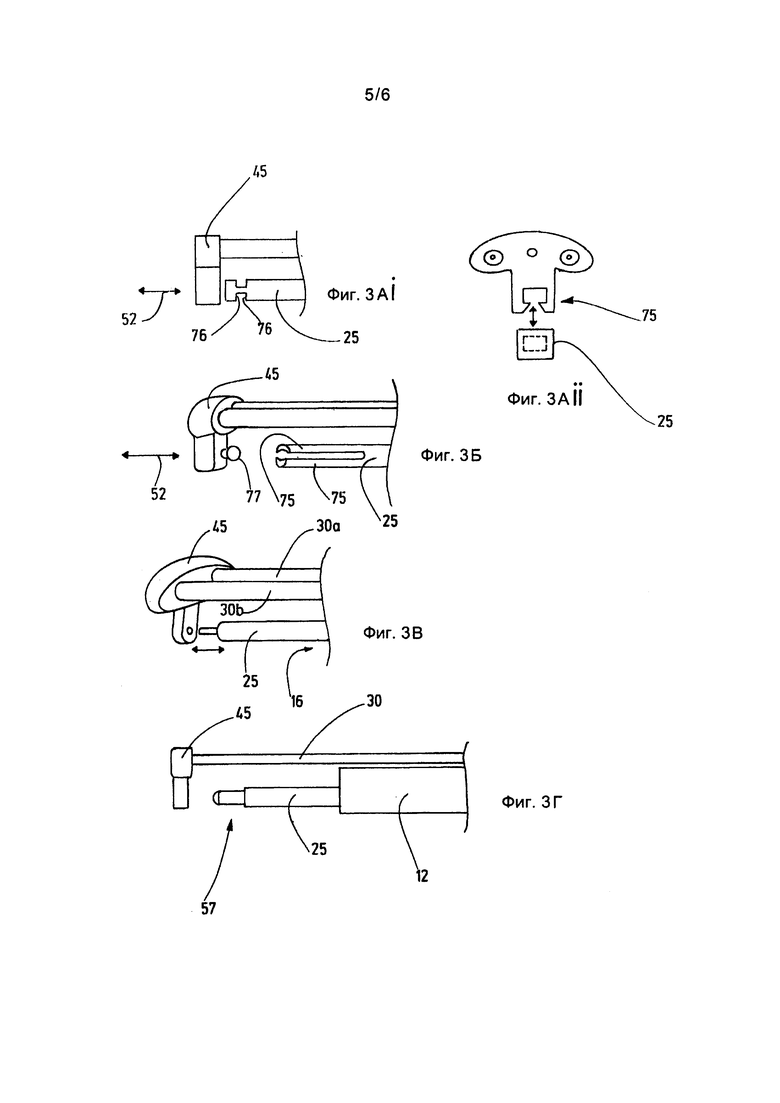
Фиг. 3Ai-3Г показывают различные варианты осуществления крепления направляющего элемента 25 на зацепляющем элементе 45. Крепления подходят для передачи усилий от направляющего элемента 25 на инструменты 30а, 30b для перемещения рабочих участков 34а, 34b закрепленных на зацепляющем элементе 45 инструментов 30а, 30b посредством приложения усилия к направляющему элементу 25 от стороны 16 выхода, и/или для перемещения рабочих участков 34а, 34b инструментов 30а, 30b обратно к стороне 16 выхода. Фиг. 3Ai и 3Aii показывают защелкивающееся соединение для создания геометрического замыкания между зацепляющим элементом 45 и направляющим элементом 25 поперечно направлению продольной протяженности 52 направляющего элемента 25. Геометрическое замыкание между зацепляющим элементом 45 и направляющим элементом 25 в направлении продольной протяженности 52 направляющего элемента выполнено посредством того, что участок одного компонента соединения (в данном случае зацепляющего элемента 45) по меньшей мере с одним защелкивающимся элементом 75, при произведенном защелкивающемся соединении, зацепляет другой компонент соединения, в данном случае, направляющий элемент 25, между противоположными поверхностями 76 геометрического замыкания, которые выполнены на другом компоненте соединения, причем поверхности 76 геометрического замыкания предотвращают перемещение одного компонента соединения относительно другого компонента соединения в направлении 52 продольной протяженности направляющего элемента 25. В варианте осуществления согласно фиг. 3Б соединение с геометрическим замыканием произведено поперечно направлению продольной протяженности 52 направляющего элемента 25 и в направлении продольной протяженности 52 направляющего элемента 25 посредством шарообразного тела 77 в зацепляющем элементе 45, которое, при произведенном соединении, охвачено двумя противоположными защелкивающимися язычками 75. Фиг. 3В показывает вариант осуществления, в котором геометрическое замыкание в направлении перемещения создано только при выталкивании зацепляющего элемента 45 посредством направляющего элемента 25 от стороны 16 выхода. Когда, тем не менее, направляющий элемент 25 задвигают обратно, направляющий элемент 25 может быть тем самым вытянут из гнезда в зацепляющем элементе 45 для отделения инструментов 30а, 30b от направляющего элемента 25. В варианте осуществления согласно фиг. 3Г силовое замыкание произведено в направлении движения направляющего элемента 25 посредством того, что дистальный конечный участок 57 направляющего элемента 25, который имеет натяг по отношению к внутреннему размеру выемки в зацепляющем элементе 45, располагается в выемке. Независимо от конкретного варианта осуществления, соединение между инструментом 30а, 30b и направляющим элементом 25 является разъемным, предпочтительно, на дистальном конце устройства, что делает возможной замену инструмента без необходимости в удалении инструмента 30а, 30b из устройства 10.
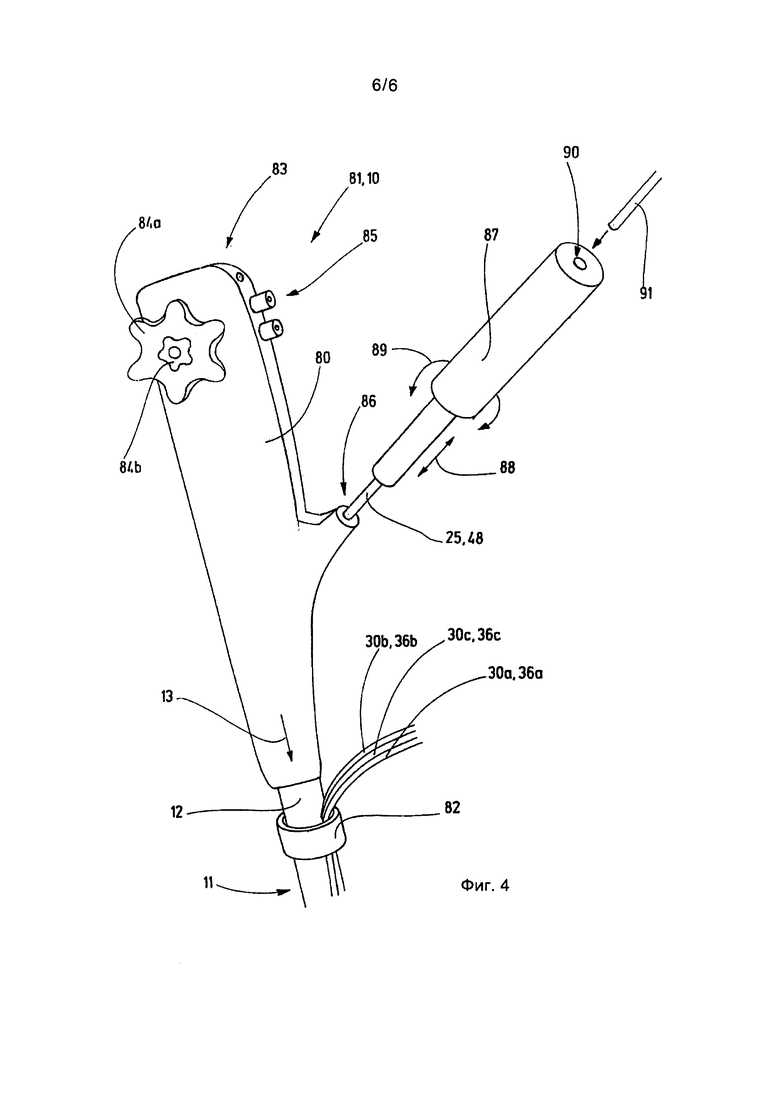
Фиг. 4 показывает примерную рукоятку 80 устройства согласно изобретению 10, которая расположена на проксимальном конце 81 устройства 10. Рукоятка 80 присоединена к стволу 12 эндоскопа 11. Вокруг ствола 12, смежно рукоятке 80 расположен направляющий держатель 82, через который простираются функциональные элементы 36а, 36b, 36с от инструментов 30а, 30b, 30с до рабочих участков 34а, 34b, 34с инструментов 30а, 30b, 30с на дистальном конце 44 устройства 10. Рукоятка 80 имеет орган 83 управления для управления эндоскопом 11. Например, орган 83 управления может иметь отклоняющие колесики 84а, 84b для целенаправленного искривления дистального конца 14 эндоскопа 11, а также элементы 85 управления, например, для подведения воздуха и/или воды на дистальном конце 14 ствола 12. На рукоятке 80 расположен вход 86 в рукоятку 80, который соединен с простирающимся через ствол 12 рабочим каналом 20, и простирается через направляющий элемент 25 в рабочий канал 20 эндоскопа 11. На направляющем элементе 25 закреплена расположенная на рукоятке 80 рукоятка 87 направляющего элемента, посредством которой направляющий элемент 25 может быть выдвинут далее в направлении 13 к дистальному концу 14 ствола 12 и/или направляющий элемент 25 может быть несколько задвинут обратно от входа 86, как обозначено посредством двойной стрелки 88. Кроме того, рукоятка 87 направляющего элемента является вращаемой (двойная стрелка 89) для вращения направляющего элемента 25 вокруг продольной оси направляющего элемента 25. За счет этого зацепляющий участок 70, 70а, 70b направляющего элемента 25 и/или соединенного с направляющим элементом 25 зацепляющего элемента 45 посредством рукоятки направляющего элемента 87 может быть перемещена, позиционирована и/или выровнена напротив дистального торца 16 ствола 12 относительно торца 16 извне тела пациента, когда рабочий участок 34а-с соединенных с направляющим элементом 25 посредством его зацепляющего участка 70, 70а, 70b и/или посредством зацепляющего элемента 45 инструментов 30а, 30b расположен в пределах тела пациента. Факультативно, рукоятка 87 направляющего элемента может быть, непосредственно или опосредованно, закреплена на рукоятке 80 над входом 86 в рабочий канал 20, например, посредством люэровского присоединения, причем закрепленная рукоятка 87 направляющего элемента, предпочтительно, может быть перемещена по двойной стрелке 88 для перемещения вперед и перемещения назад соединенных с направляющим элементом 25 инструментов 30а, 30b, 30с, и/или может быть повернута, как обозначено посредством двойной стрелки 89, вокруг продольной оси для поворота или же углового смещения соединенных с направляющим элементом 25 инструментов 30а, 30b, 30с. При помощи крепления рукоятки 87 направляющего элемента рабочий канал 20 может быть уплотнен. Для опосредованного крепления служат адаптер крепления на эндоскопе 11 и уплотнение рабочего канала 20.
Для направления жидкости, газа, твердого вещества и/или инструмента в пределах направляющего элемента 25 направляющий элемент 25 может быть выполнен полым. В рукоятке 87 направляющего элемента может быть расположено, например, отверстие 90, через которое жидкость, газ и/или твердое вещество от дистального конца 44 устройства 10 могут быть отсосаны через направляющий элемент 25 до отверстия 90, и/или через которое жидкость, газ и/или твердое вещество могут быть подведены в область 18 перед торцом 16 эндоскопа 11. Альтернативно или дополнительно, через отверстие 90 инструмент 91 может быть продвинут через направляющий элемент 25 в область 18 перед торцовой поверхностью 16 и/или задвинут обратно из области 18. Под инструментом может подразумеваться, например, гибкий зонд для подачи струи воды или же для подачи струи жидкости.
Направляющий элемент 25 может иметь хорошую электропроводность, причем вне тела пациента к направляющему элементу 25 может быть присоединен электрический источник мощности, который может быть выполнен для снабжения по меньшей мере одного из инструментов 30а-с, которые направлены рядом со стволом 12 эндоскопа 11.
Работа с устройством 10 согласно изобретению может осуществляться, например, как указано ниже. Вначале, инструменты 30а, 30b, 30с могут быть расположены в положении, как показано на фиг. 1А, в котором направляющий элемент 25 находится в максимально втянутом в рабочий канал 20 положении. Затем пользователь вводит дистальный конец 14 эндоскопа 11 в тело пациента. При этом пользователь имеет возможность приспосабливания искривления дистального конца 14 ствола 12, например, посредством отклоняющих колесиков 84а, 84b на рукоятке 80. По достижении пункта назначения, пользователь имеет возможность изменения положения и/или ориентации рабочих участков 34а-с инструментов 30а-30 с относительно дистального конца 14 ствола 12 посредством приложения усилия к направляющему элементу 25. Например, пользователь имеет возможность перемещения рабочих участков 34а-34с инструментов 30а-30с в поперечном торцу 16 направлении от торца 16, например перпендикулярно от торца, посредством управления направляющим элементом 25 извне тела пациента, в котором пользователь продвигает направляющий элемент 25 через рабочий канал 20 далее по направлению к дистальному концу 14 ствола 12. За счет этого рабочие участки 34а-с могут быть расположены, например, в положении относительно дистального конца 14 ствола 12, как представлено на фиг. 1Б. Перед обработкой или исследованием, или во время их, в области 18, в которой расположены рабочие участки 34а-с, для приспосабливания положения рабочих участков 34а-с, пользователь имеет возможность перемещения рабочих участков 34а-с посредством приложения усилия к направляющему элементу 25. Для этого пользователь имеет возможность, посредством вращения направляющего элемента 25 вокруг его собственной оси, поворота рабочих участков 34а-с вокруг этой оси. Посредством приведения в действие направляющего элемента 25 пользователь имеет возможность поворота рабочих участков 34а-с, предпочтительно, вокруг оси, поперечной, прежде всего, перпендикулярной направлению продольной протяженности направляющего элемента 25, в котором простирается направляющий элемент 25 вне рабочего канала 20. Приспособление положения и/или ориентации рабочих участков 34а-с относительно дистального конца 14 ствола 12 посредством направляющего элемента 25, обработка и/или исследование в области 18 могут быть произведены посредством устройства 10, предпочтительно, под визуальным контролем пользователя, который имеет возможность просматривания области 18 извне тела пациента с помощью средства для передачи изображений.
Устройство согласно изобретению 10 содержит ствол эндоскопа 12, через который простирается оканчивающийся на стороне 16 выхода ствола 12 рабочий канал 20. Через рабочий канал 20 простирается направляющий элемент 25, который, предпочтительно, направлен в рабочем канале 20 с возможностью продольного перемещения вдоль рабочего канала 20. Устройство 10 выполнено таким образом, что дистальный конечный участок 32а-с простирающегося рядом вдоль ствола 12 инструмента 30а-с является перемещаемым вдоль ствола 12 за пределы стороны 16 для перемещения рабочего участка 34, 34а-с инструмента 30, 30а-с от стороны 16 выхода для удлинения дистального конечного участка устройства 10. Инструмент 30, 30а-с соединен с направляющим элементом 25 для направления рабочего участка 34, 34а-с инструмента 30, 30а-30с в поперечном стороне 16 выхода направлении, например перпендикулярно стороне 16 выхода, от стороны 16 выхода в область 18 напротив стороны 16 выхода (что включает в себя также направление под наклоном напротив стороны 16 выхода) для работы в области 18 с помощью инструмента 30, 30а-с. За счет удерживаемого и/или направленного в рабочем канале 20 направляющего элемента 25 инструмент 30, 30а-30с удержан напротив стороны 16 выхода, опосредованно через направляющий элемент 25, с помощью ствола 12, и/или направлен посредством рабочего канала 20. Устройство 10, предпочтительно, выполнено таким образом, что рабочие участки 34, 34a-d инструментов 30, 30а-с при перемещении рабочих участков 34, 34а-с направленным образом получают выталкивание от стороны 16 выхода и/или затягивание назад к стволу 12 вдоль направления продольной протяженности дистального конечного участка 20а рабочего канала 20.
За счет этого получено особо устойчивое размещение выступающих рядом со стволом 12 за ствол 12 инструментов 30, 30а-30с и/или особо устойчивое направление инструмента 30, 30а-с за пределы ствола 12, что делает возможным точное и плавное позиционирование рабочего участка 34, 34а-с инструмента 30, 30а-с.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 Устройство
11 Эндоскоп
12 Шток
13 Дистальное направление
14 Дистальный конец
15 Проксимальное направление
16 Сторона выхода, торцевая сторона
17 Осветительный узел
18 Область
19 Вход для средства для передачи изображений
20 Рабочий канал
20а Конечный участок рабочего канала
21 Отверстие
25 Направляющий элемент
26 Продольное направление
30 Инструмент
30а Первый инструмент
30b Второй инструмент
30 с Третий инструмент
32 Дистальный конец
32а-с Дистальные конечные участки
34 Рабочий участок
34а-с Рабочие участки
36 Функциональный элемент
36а-с Функциональные элементы
40 Направляющая манжета, первый направляющий держатель
40i, 40ii, 40iii Гнезда
41 Внешняя сторона, продольная сторона
42 Направление продольной протяженности
43 Второй направляющий держатель
44 Дистальный конец устройства
45 Зацепляющий элемент
45а Участок геометрического замыкания
48 Участок
50 Направленность
52 Направление продольной протяженности
55 Двойная стрелка
56 Двойная стрелка
57 Дистальный конец направляющего элемента
60 Гнездо
61 Гнездо
65 Удерживающий элемент
65а Участок геометрического замыкания
70 Зацепляющий участок
70а, 70b Зацепляющие участки
71а, 71b Двойные стрелки
72а, b Двойные стрелки
75 Защелкивающийся элемент, защелкивающийся язычок
76 Поверхности геометрического замыкания
77 Тело
80 Рукоятка
81 Проксимальный конец
82 Направляющий держатель
83 Орган управления
84а, 84b Отклоняющие колесики
85 Элементы управления
86 Вход
87 Рукоятка направляющего элемента
88 Двойная стрелка
89 Двойная стрелка
90 Отверстие
91 Инструмент
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ ТРУБ И ВНУТРЕННЕЕ СОПЛО ДЛЯ РАЗЛИВКИ РАСПЛАВЛЕННОГО МЕТАЛЛА | 2011 |
|
RU2593557C2 |
| ВНУТРЕННЕЕ СОПЛО ДЛЯ РАЗЛИВКИ РАСПЛАВЛЕННОГО МЕТАЛЛА ИЗ МЕТАЛЛУРГИЧЕСКОГО РЕЗЕРВУАРА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2562870C2 |
| МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2647096C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2012 |
|
RU2623930C2 |
| ОГНЕЗАЩИТНАЯ ЛЕНТА | 2015 |
|
RU2676573C2 |
| СИСТЕМА, ИСПОЛЬЗУЕМАЯ ПРИ ВОССТАНОВЛЕНИИ ТКАНЕЙ | 2011 |
|
RU2616994C2 |
| РУЧНАЯ МАШИНА | 2010 |
|
RU2555284C2 |
| ЭНДОСКОП С ПОВОРОТНОЙ ПРИЗМОЙ | 2009 |
|
RU2538626C2 |
| ОГРАНИЧИТЕЛЬ УТЕЧКИ ДЛЯ ЭЛЕКТРОЛИЗЕРА | 2002 |
|
RU2294986C2 |
| СПОСОБ СБОРКИ СТУПЕНИ СТАТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2666836C2 |
Группа изобретений относится к медицине. Устройство включает в себя эндоскоп, через который простирается оканчивающийся на стороне выхода ствола рабочий канал. Через рабочий канал простирается направляющий элемент, который, предпочтительно, направлен в рабочем канале с возможностью продольного перемещения вдоль рабочего канала. Устройство выполнено таким образом, что дистальный конечный участок простирающегося рядом вдоль ствола инструмента является перемещаемым вдоль ствола за пределы стороны для перемещения рабочего участка инструмента от стороны выхода для удлинения дистального конечного участка устройства. Инструмент соединен с направляющим элементом для направления рабочего участка инструмента в поперечном стороне выхода направлении, например перпендикулярно, от стороны выхода в область напротив стороны выхода для работы в области с помощью инструмента. Применение данного изобретения позволит устойчиво направлять расположенный снаружи от эндоскопа инструмент. 2 н. и 12 з.п. ф-лы, 14 ил.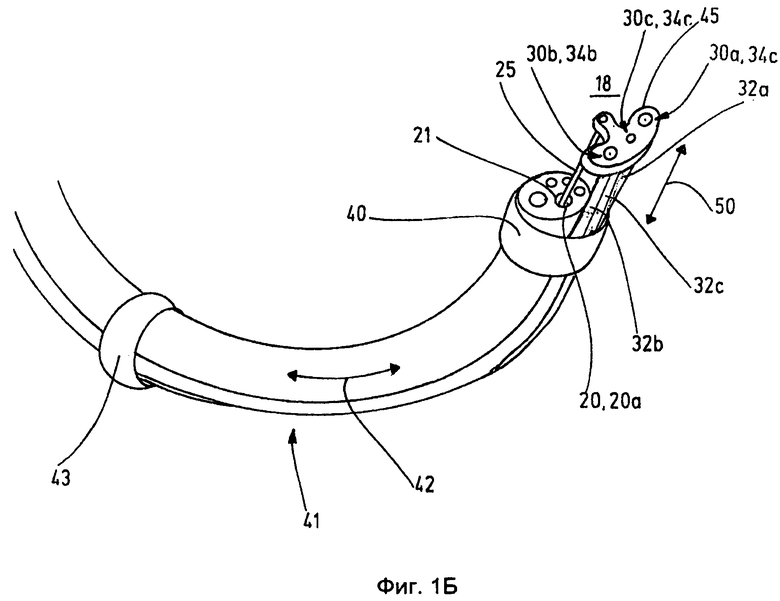
1. Медицинское устройство (10) для обработки и/или исследования ткани, содержащее:
- эндоскоп (11), имеющий ствол (12) с проходящим в нем рабочим каналом (20), оканчивающимся на торцевой стороне (16) ствола (12), и
- по меньшей мере один инструмент (30, 30a, 30b, 30c) для обработки ткани, расположенный проходящим рядом со стволом (12) эндоскопа,
причем устройство (10) выполнено таким образом, что конечный участок (32, 32a, 32b, 32c) инструмента (30, 30a, 30b, 30c), который содержит рабочий участок (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c), является перемещаемым вдоль ствола (12) за пределы торцевой стороны (16) ствола (12) для перемещения рабочего участка (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c) в область (18) напротив торцевой стороны (16) ствола (12) для работы в области (18) с помощью рабочего участка (34, 34a, 34b, 34c),
причем инструмент (30, 30a 30c) находится в зацеплении с направляющим элементом (25) для направления рабочего участка (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c) при перемещении конечного участка (32, 32a, 32b, 32c) за пределы торцевой стороны (16) ствола (12) в область (18), и
причем направляющий элемент (25) для направления рабочего участка (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c) при перемещении дистального конечного участка (32, 32a, 32b, 32c) за пределы торцевой стороны (16) ствола (12) простирается через рабочий канал (20).
2. Устройство (10) по п. 1, причем направляющий элемент (25) направлен в рабочем канале (20) с возможностью продольного перемещения.
3. Устройство (10) по одному из предшествующих пунктов, причем направляющий элемент (25) подвижно соединен с инструментом (30, 30a, 30b, 30c) таким образом, что инструмент (30, 30a, 30b, 30c) при перемещении направляющего элемента (25) перемещается совместно с направляющим элементом (25).
4. Устройство (10) по одному из предшествующих пунктов, причем рабочий участок (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c) является перемещаемым посредством направляющего элемента (25) вдоль заданной рабочим каналом (20) направленности (50) от торцевой стороны (16) в область (18) и/или причем рабочий участок (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c) является обратно перемещаемым посредством направляющего элемента (25) вдоль направленности (50) от области (18).
5. Устройство (10) по одному из предшествующих пунктов, причем рабочий участок (34, 34a, 34b, 34c) инструмента (30, 30a, 30b, 30c) является вращаемым и/или поворачиваемым посредством направляющего элемента (25).
6. Устройство (10) по одному из предшествующих пунктов, причем на продольной стороне (41) ствола (12) расположена направляющая для направления инструмента (30, 30a, 30b, 30c) вдоль ствола (12).
7. Устройство (10) по одному из предшествующих пунктов, причем направляющий элемент (25) выполнен для вхождения в зацепление по меньшей мере с двумя инструментами (30a, 30b, 30c).
8. Устройство (10) по одному из предшествующих пунктов, причем на направляющем элементе (25) закреплен зацепляющий элемент (45), который находится в зацеплении по меньшей мере с одним инструментом (30a, 30b).
9. Устройство (10) по п. 8, причем инструмент (30, 30a, 30b, 30c) находится в зацеплении с зацепляющим элементом (45) и/или с зацепляющим участком (70, 70a, 70b) таким образом, что инструмент (30, 30a, 30b, 30c) направлен относительно зацепляющего элемента (45) и/или зацепляющего участка (70, 70a, 70c) с возможностью перемещения в зацепляющем элементе (45) и/или в зацепляющем участке (70, 70a, 70b).
10. Устройство (10) по п. 8 или 9, причем зацепляющий элемент (45) и/или зацепляющий участок (70, 70a, 70b) имеет подходящую к внешней форме дистального конца (14) ствола (12) форму и/или подходящую к расположенному на дистальном конце (14) ствола (12) удерживающему элементу (65) форму таким образом, что при нахождении подходящей формы в зацеплении с внешней формой зацепляющий элемент (45) и/или зацепляющий участок (70, 70a, 70b) получает заданную ориентацию и/или заданное положение относительно дистального конца (14) ствола (12) и/или относительно удерживающего элемента (65).
11. Устройство (10) по одному из предшествующих пунктов, причем зацепление между направляющим элементом (25) и инструментом (30, 30a, 30b, 30c) является разъемным неразрушающим образом, и причем, после разъема зацепления, разъемное неразрушающим образом зацепление является устанавливаемым с другим инструментом (30, 30a, 30b, 30c).
12. Устройство (10) по одному из предшествующих пунктов, причем закрепленный на дистальном конце (14) ствола (12) направляющий держатель (40) имеет гнезда (40i, 40ii, 40iii), в которых с возможностью перемещения направлен соответственно один инструмент (30a, 30b, 30c).
13. Устройство (10) по одному из предшествующих пунктов, причем направляющий элемент (25) для размещения по меньшей мере двух инструментов (30a, 30b), которые расположены проходящими рядом со стволом (12), выполнен таким образом, что рабочий участок (34a, 34b) по меньшей мере одного из инструментов (30a, 30b) относительно рабочего участка (34a, 34b) другого инструмента (30a, 30b) является направленно перемещаемым посредством направляющего элемента и/или причем рабочий участок (34a, 34b) по меньшей мере одного из инструментов (30a, 30b) относительно рабочего участка (34a, 34b) другого инструмента (30a, 30b) является вращаемым и/или поворачиваемым посредством направляющего элемента (25).
14. Направляющий элемент (25) для медицинского устройства (10) по одному из предшествующих пунктов, выполненный в виде прутка, подвижно располагаемого в рабочем канале (20) ствола (12) эндоскопа (11).
| US 20120165604 A1, 28.06.2012 | |||
| US 20060069304 A1, 30.03.2006 | |||
| WO 2010118054 A2, 14.10.2010 | |||
| US 20150335388 A1, 26.11.2015 | |||
| US 20040039250 A1, 26.02.2004 | |||
| US 20130041214 A1, 14.02.2013 | |||
| US 6878106 B1, 12.04.2005. |

