Область техники
Устройство относится к области подъемно-транспортного машиностроения и может быть использовано в составе лесозаготовительной машины, осуществляющей транспортировку сортиментов.
Предшествующий уровень техники
Одной из распространенных технологий заготовки древесины является сортиментная технология с применением комплекса машин в составе харвестера и форвардера [Ширнин Ю.А., Гайсин И.Г., Рыганова С.Г., Гатауллин А.Р. Результаты наблюдения эффективности работы системы машин "харвестер+форвардер" по различным технологическим схемам // Актуальные проблемы лесного комплекса. 2020. №57. URL: https://cyberleninka.ru/article/n/rezultaty-nablyudeniya-effektivnosti-raboty-sistemy-mashin-harvester-forvarder-po-razlichnym-tehnologicheskim-shemam (дата обращения: 09.08.2021)]. Форвардер посредством манипулятора осуществляет сбор лесоматериалов (сортиментов) на вырубке и их транспортировку на грузовой платформе по лесосечным волокам к месту штабелевки. Грузовая платформа форвардера представляет собой коники, установленные на задней полураме лесозаготовительной машины [Клубничкин Е.Е., Котиев Г.О., Федотов М.В., Наказной И.О., Рогачев Д.И. Выбор и обоснование конструкции грузового отсека погрузочно-транспортной машины // Научный журнал КубГАУ. 2020. №163. URL: https://cyberleninka.ru/article/n/vybor-i-obosnovanie-konstruktsii-gruzovogo-otseka-pogruzochno-transportnoy-mashiny (дата обращения: 09.08.2021)]. В общем случае коник представляет собой основание, монтируемое поперек задней полурамы лесозаготовительной машины. На концах основания устанавливаются ограничительные элементы, удерживающие лесоматериалы на грузовой платформе.
В реальных условиях масса полногрузной пачки (пачки, сформированной из лесоматриеалов, полностью заполняющих поперечное сечение коника, т.е. загрузка до вершины ограничительных элементов) сильно варьируется. Например, для условий южной части Республики Карелия интервал вариации массы пачки, сформированной из еловых лесоматериалов (пиловочника) длиной 6,1 м, для грузовой платформы с площадью поперечного сечения грузовой платформы 4 м2, может составить от 13 до 17 т [Budnik P., Shegelman I., Baklagin V. Variability of forwarder truckload parameters in the Pryazha forestry division of the Republic of Karelia (Russia): a computer experiment // Central European Forestry Journal. 2020. №1(66). C. 12-22]. Вариация массы транспортируемой пачки обуславливается изменчивостью параметров сортиментов: геометрических размеров, плотности древесины.
Исследования свидетельствуют, что номинальная грузоподъемность машины может быть легко превышена до того, как грузовая платформа будет полностью загружена [Шегельман И.Р., Будник П.В., Баклагин В.Н. Методика компьютерного эксперимента при определении грузоподъемности и размеров грузового отсека лесной транспортной машины // Известия высших учебных заведений. Лесной журнал. 2019. №6(372). С. 160-173], т.е. машины эксплуатируются с перегрузками, что неизбежно приводит к увеличению частоты поломок.
Из уровня техники известна грузовая платформа форвардера, включающая ограждение и коники, установленные на задней полураме лесозаготовительной машины, причем стойки коников выполнен из двух шарнирно соединенных частей и снабжены гидроприводами [Новый облик гиганта // Just Forest - 2017, №1, С. 4-5, URL: https://www.komatsuforest.ru/-/media/komatsu-forest/files/corporate-files/just-forest/jf-2017-no-1/jf_1_2017_ru_v2.pdf?la=ru-ru].
Недостатком грузовой платформы является то, что у оператора нет возможности объективно оценивать запас по грузоподъемности машины, что на практике может приводить к эксплуатации лесной машины с перегрузкой, например, при транспортировке сортиментов длиной 5 и более метров грузоподъемность машины может быть превышена до того момента, когда высота стоек начнет ограничивать уровень загрузки [Budnik P., Shegelman I., Baklagin V. Variability of forwarder truckload parameters in the Pryazha forestry division of the Republic of Karelia (Russia): a computer experiment // Central European Forestry Journal. 2020. №1(66). С. 12-22].
Известна грузовая платформа форвардера, включающая ограждение и коники, установленные на задней полураме лесозаготовительной машины, причем стойки коника выполнены в виде трубы [Форвардер компании Ponsse под обозначением WISENT, https://pim.ponsse.com/media/ponsee-pim-api/api/content/getfile/17843935.pdf].
Недостаток грузовой платформы в том, что конструкция не позволяет оператору определить максимальный уровень загрузки грузовой платформы по грузоподъемности и, соответственно, контролировать загрузку грузовой платформы и рационально планировать движение по волокам при сборе лесоматериалов.
Известна грузовая платформа форвардера, выбранная в качестве ближайшего аналога, включающая ограждение и коники, установленные на задней полураме лесозаготовительной машины, причем стойки выполнены в виде полой трубы, при этом в верхней части с возможностью перемещения вдоль продольной оси корпуса телескопически установлена опора [«Красный октябрь» - история длиною в сотню лет // Нас знают в лесу. Корпоративный журнал, 2019, С. 16-17, URL: https://www.deere.ru/assets/publications/index.html?id=dcc6b238#18].
Конструкция такой грузовой платформы в некоторой степени позволяет варьировать размеры грузовой платформы путем поднятия или опускания опоры. Телескопически установленная опора предназначена производителем для использования при транспортировке сортиментов относительно не большой длины, как правило 4 м. Это позволяет полностью использовать потенциал грузоподъемности машины. Однако при транспортировке сортиментов длиной 5 и более метров грузоподъемность машины может быть превышена до того момента, когда высота стоек начнет ограничивать уровень загрузки [Budnik P., Shegelman I., Baklagin V. Variability of forwarder truckload parameters in the Pryazha forestry division of the Republic of Karelia (Russia): a computer experiment // Central European Forestry Journal. 2020. №1(66). C. 12-22]. Таким образом, как и в других приведенных аналогах, конструкция не позволяет определять оператору максимальный уровень загрузки грузовой платформы, который может приводить к перегрузке машины, и вследствие чего к выходу ее из строя.
Следует отметить, что из уровня техники известны системы измерения груза на платформе форвардера, обычно поставляемые как дополнительная «опция» (функция) [Патент на изобретение RU2657024 «Способ и устройство в системе взвешивания, соответствующий продукт программного обеспечения и машина для погрузки-разгрузки материалов», заявлен 16.05.2014, опубликовано 08.06.2018]. Например, форвардеры компании «Ponsse» могут оснащаться системой взвешивания груза «Ponsse loadoptimizer» [Весы PONSSE Load Optimizer, https://www.ponsse.com/ru/produkciya/informacionnye-sistemy-opti/produkt/-/p/forwarder_systems#/]. В общем случае такие системы имеют программную и механическую части. Последняя представляет собой серьгу подвеса манипулятора с интегрированными весами.
Недостатком систем измерения груза является их сложность и необходимость постоянного технического обслуживания и калибровки, а также увеличение общей стоимости лесозаготовительной техники. Поэтому на практике широкого распространения такие технические решения не получили.
Таким образом, техническая проблема заключается в необходимости создания простого надежного технического решения, обеспечивающего индикацию предельного уровня загрузки грузовой платформы лесоматериалами.
Раскрытие технического решения
Технический результат заключается в обеспечении индикации на грузовой платформе максимального уровня загрузки лесоматериалов, что позволяет оператору более полно и объективно оценивать запас по грузоподъемности лесозаготовительной машины при сборе и транспортировке лесоматериалов на лесосеке, планировать движение по волокам и предотвращать перегрузку лесозаготовительной машины. Это в свою очередь позволяет уменьшить вероятность отказа механизмов машины, увеличить срок службы, межремонтный интервал и периода наработки на отказ. Кроме того, обеспечение индикации на грузовой платформе максимального уровня загрузки лесоматериалов позволяет осуществлять внешний визуальный контроль работы оператора с целью выявления случаев перегрузки лесной машины.
Технический результат достигается тем, что грузовая платформа лесозаготовительной машины, снабженной манипулятором с захватом, включает ограждение и коники, установленные на задней полураме лесозаготовительной машины, при этом по крайней мере одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы с выбранным шагом, начиная с уровня загрузки лесоматериалами минимальной длины, при которой сформированная полногрузная пачка превышает грузоподъемность лесозаготовительной машины.
Также технический результат достигается тем, что по крайней мере одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов по меньшей мере двух лесообразующих пород.
Кроме того, технический результат достигается тем, что индикаторы уровня загрузки для лесоматериалов лесообразующей породы соответствуют сухим условиям лесозаготовки, при этом по крайней мере еще одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы для влажных условий лесозаготовки.
Технический результат достигается также тем, что индикаторы уровня загрузки для лесоматериалов лесообразующей породы соответствуют сухим условиям лесозаготовки, при этом дополнительно стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы для влажных условий лесозаготовки.
Технический результат достигается также тем, что по крайней мере один индикатор уровня загрузки выполнен с возможностью перемещения вдоль стоек коника.
Также технический результат достигается тем, что выбранный шаг индикаторов выполнен неравномерным.
Описание чертежей
Техническое решение пояснено на чертежах, где
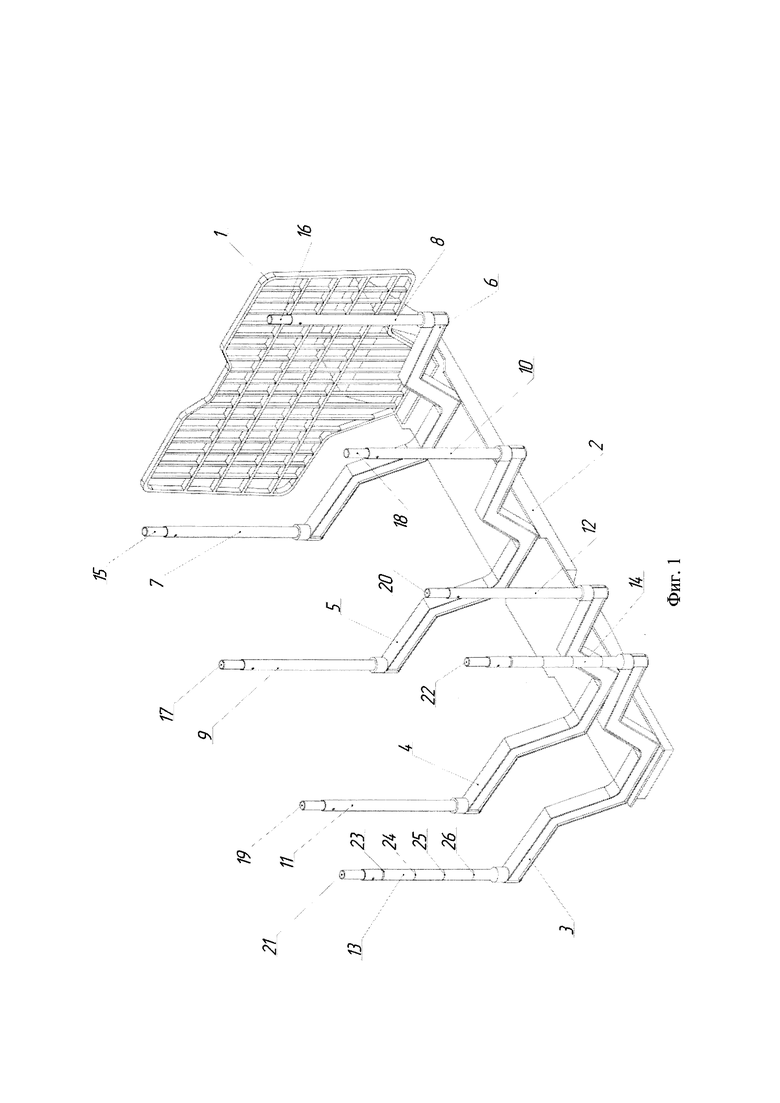
фиг. 1 - общая схема грузовой платформы лесозаготовительной машины (изометрия);
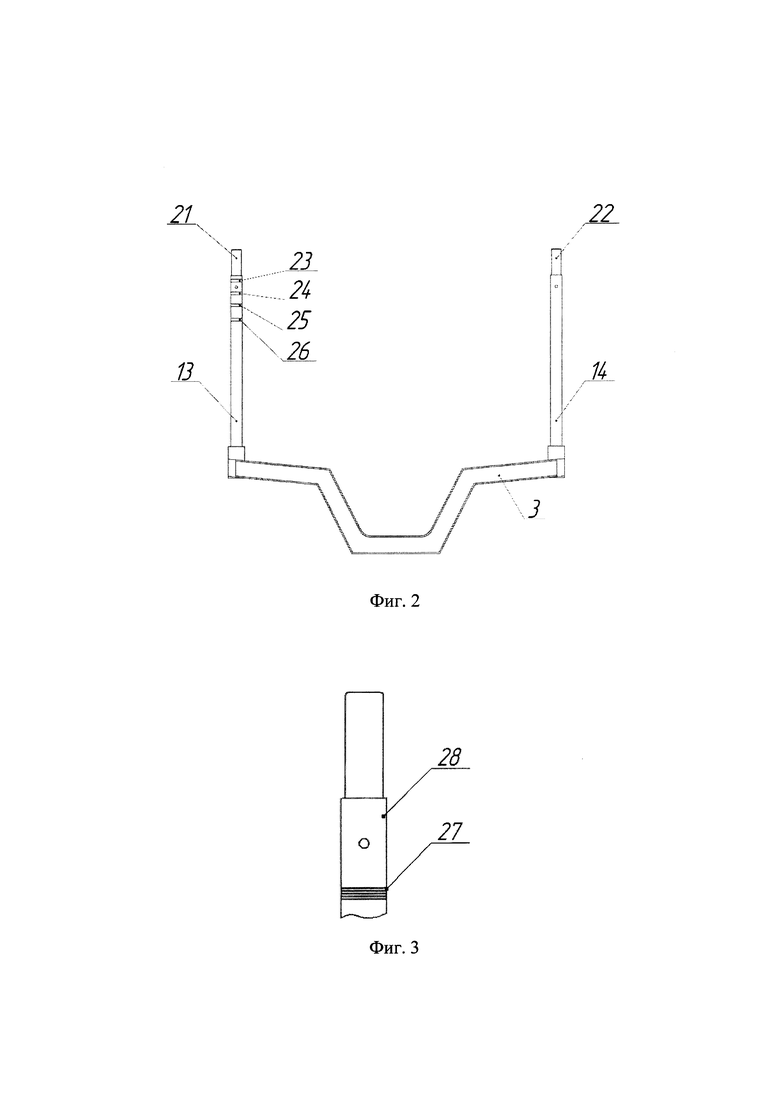
фиг. 2 - вариант размещения индикаторов на стойке коника грузовой платформы лесозаготовительной машины для одной лесообразующей породы;
фиг. 3 - первый вариант исполнения индикатора уровня загрузки;
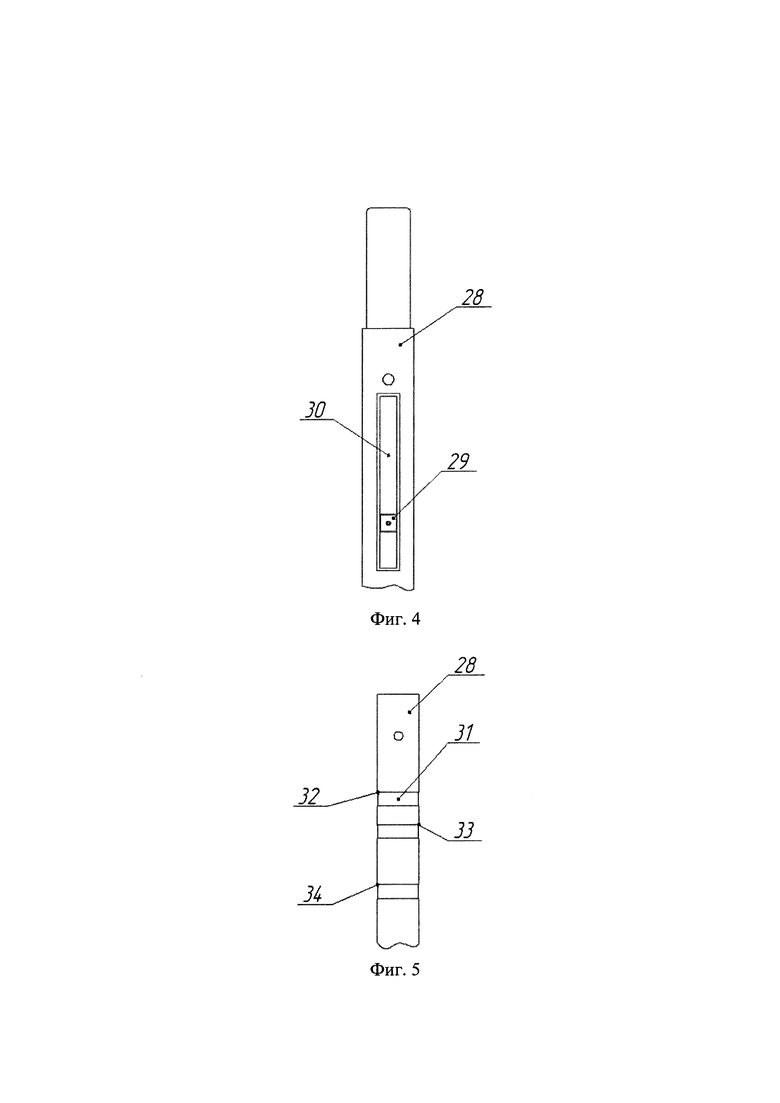
фиг. 4 - второй вариант исполнения индикатора уровня загрузки;
фиг. 5 - третий вариант исполнения индикатора уровня загрузки;
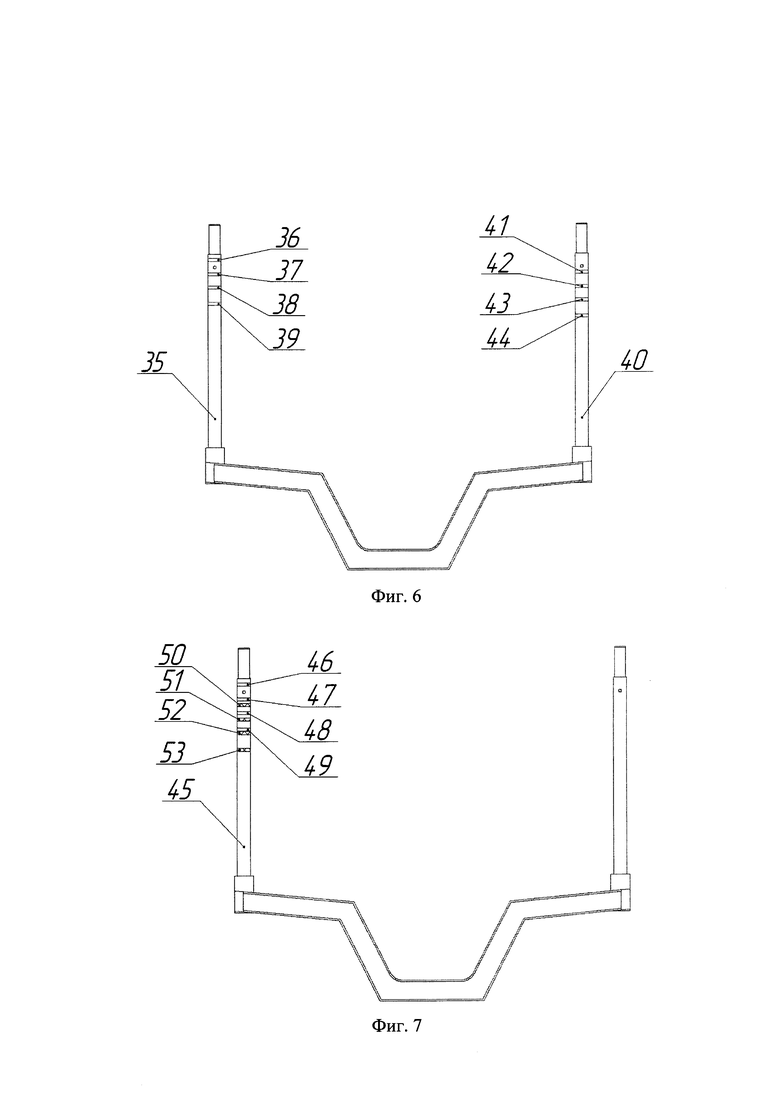
фиг. 6 - коник грузовой платформы лесозаготовительной машины с вариантом размещения индикаторов уровня загрузки для двух лесообразующих пород;
фиг. 7 - вариант размещения индикаторов на стойке коника грузовой платформы лесозаготовительной машины для двух лесообразующих пород;
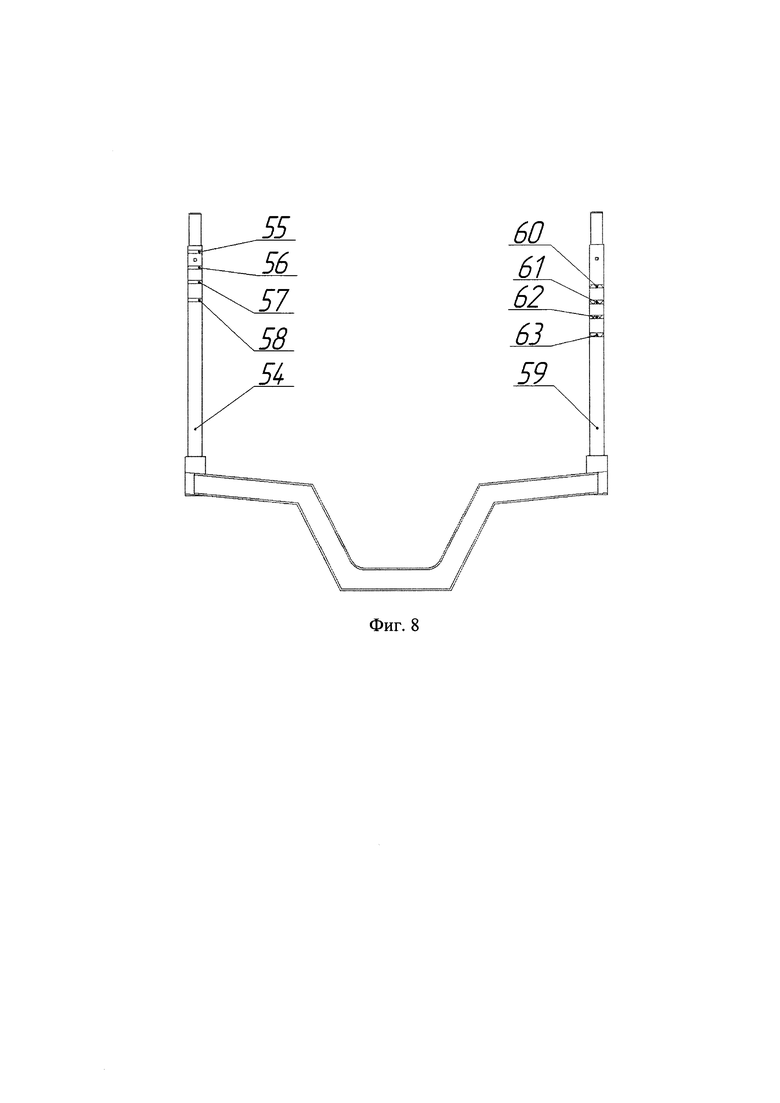
фиг. 8 - коник грузовой платформы лесозаготовительной машины с вариантом размещения индикаторов уровня загрузки для сухих и влажных условий.
Примеры осуществления технического решения
Грузовая платформа лесозаготовительной машины, снабженной манипулятором с захватом, включает ограждение 1 и коники, установленные на задней полураме 2 лесозаготовительной машины (фиг. 1). В предпочтительном варианте осуществления изобретения коники состоят из оснований 3-6, закрепляемых на задней полураме 2, и стоек 7-14. В предпочтительном варианте корпус стоек 7-14 выполнен в виде полой трубы круглого сечения или иного многоугольника (треугольник, прямоугольник, шестиугольник и др.). В верхней части корпуса стоек 7-14 с возможностью перемещения вдоль продольной оси могут быть телескопически установлены опоры 15-22, представляющие собой, например полую трубу. Фиксация опор 15-22 может быть обеспечена, например посредством болтового соединения.
В одном из вариантов осуществления изобретения по крайней мере одна стойка коника (например 13) снабжена индикаторами уровня загрузки 23-26 для лесоматериалов из лесообразующей породы с выбранным шагом, начиная с уровня загрузки лесоматериалами минимальной длины, при которой сформированная полногрузная пачка превышает грузоподъемность лесозаготовительной машины и, в предпочтительном варианте, заканчивая уровнем загрузки для лесоматериалов максимальной заготовляемой длины (фиг. 1).
В одном из варианте осуществления технического решения для индикаторов выбирается порода древесины из состава лесообразующих, распространенная в месте лесозаготовок, характеризующаяся наибольшей плотностью. Например, для условий южной части Республики Карелия может быть выбрана береза, а для северной части береза или сосна.
Шаг индикаторов может выбираться в соответствии с градацией длин заготовляемых лесоматериалов (в общем случае: через 0.1 м, 0.25 м, 0.5 м). Например, индикатор 23 устанавливается на уровне максимальной загрузки лесоматериалами длиной 4,5 м, индикатор 24 на уровне загрузки лесоматериалами длиной 5 м, индикатор 25 на уровне загрузки лесоматериалами длиной 5,5 м, индикатор 26 на уровне загрузки лесоматериалами длиной 6 м (фиг. 2).
Начальное значение шага индикаторов выбирается из условия соответствия загрузки лесоматериалами минимальной длины, при которой сформированная пачка превышает грузоподъемность лесозаготовительной машины. Например, для южной части Республики Карелия шаг индикаторов уровня загрузки целесообразно начинать с отметки соответствующей загрузке лесоматериалами длиной в диапазоне 4-4,5 м, при которой сформированная пачка превышает грузоподъемность лесозаготовительной машины. Конечное значение шага индикаторов в предпочтительном варианте осуществления изобретения определяется максимальной заготовляемой длиной лесоматериалов. Для большинства видов традиционно заготовляемых в массе лесоматериалов это 6 м или 6.5 м. При заготовке бревен для столбов и свай конечное значение шага индикаторов может соответствовать отметкам 8.5 м, 9.5 м, 11 м, 13 м.
Шаг индикаторов в некоторых вариантах выполнен неравномерным. Например, первый индикатор уровня загрузки соответствует отметке максимальной загрузке лесоматериалов длиной 4 м и далее с шагом 0.5 м до 6 м, а последний соответствует загрузке лесоматериалом длиной 8.5 м. Целесообразность неравномерного шага индикаторов загрузки обуславливается заготовляемыми лесоматериалами. На Северо-Западе России на практике обычно заготовляют баланс длиной 4 м, пиловочник 5-6.1 с шагом 0.25 м и реже столбы длиной 8.5 или 9.5 м. Для различных регионов на основе подобных соображений могут быть определены соответствующие шаги индикаторов загрузки (соответствующие шкалы).
Выбор стойки грузовой платформы, снабжаемой индикаторами уровня загрузки, осуществляется исходя из обеспечения наилучшей видимости для оператора лесозаготовительной машины. В предпочтительном варианте это ближние к оператору стоки 7, 8 либо дальние 13, 14 (фиг. 1).
Конструктивно индикаторы уровня загрузки могут представлять следующее. В первом варианте индикатор представляет собой выемку 27, выполненную на внешней поверхности стойки коника 28 (фиг. 3). Поверхность выемки 27 выполнена контрастным цветом к внешней поверхности стойки коника 28. Выемка 27 может быть выполнена из серии бороздок как это показано на фиг. 3.
В одном из вариантов осуществления изобретения по крайней мере один индикатор уровня загрузки выполнен с возможностью перемещения вдоль стоек коника. Например, в этом случае индикатор уровня загрузки представляет собой индикационный элемент 29, размещенный с возможностью перемещения в выемке 30, выполненный на поверхности стойки коника 28, причем индикационный элемент 29 имеет контрастный цвет к цвету поверхности стойки коника 28 (фиг. 4).
В третьем варианте индикатор уровня загрузки представляет собой кольцевой элемент 31, выполнен из эластичного материала, например резины. В одном из вариантов кольцевой элемент размещается в кольцевой выемке 32, выполненной на внешней поверхности стойки коника 28 (фиг. 5). При этом кольцевой элемент 31 выполняется контрастным к цвету внешней поверхности стойки коника 28. Внешняя поверхность стойки коника 28 в одном из вариантов может быть снабжена несколькими кольцевыми выемками, например 32-34.
Древостой может быть сформирован несколькими породами. Масса пачки, сформированная из различных пород, отличается. Например, расчетная средняя масса полногрузной пачки, сформированной из елового пиловочника длиной 6,1 м, в грузовой платформе с поперечным сечением 4.5 м2 составляет 16.7 т. Полногрузная пачка, сформированная из березовых дров длиной 5 м, в этой же платформе составит 19,5 т [Budnik P.V., Shegelman I.R., Baklagin V.N. The study of the mass variation of forwarder's bundle on the basis of machine experiment // Jour-nal of Mechanical Engineering Research and Developments (JMERD). - 2019. - Vol. 42 (4). - P. 108-117].
Поэтому целесообразно, чтобы грузовая платформа имела индикаторы уровня загрузки для нескольких пород, что позволит оператору лесозаготовительной машины точнее оценивать запас по грузоподъемности лесозаготовительной машины при сборе и транспортировке лесоматериалов на лесосеке, планировать движение по волокам и предотвращать перегрузку машины. В одном из вариантов осуществления изобретения стойка коника 35 снабжена индикаторами уровня загрузки 36-39 для лесоматериалов первой лесообразующей породы с заданным шагом, а стойка коника 40 снабжена индикаторами уровня загрузки 41-44 для лесоматериалов второй лесообразующей породы (фиг. 6). Подобным образом могут быть снабжены другие стойки коников грузовой платформы лесозаготовительной машины для других лесообразующих пород. Например, для условий Республики Карелия целесообразно предусматривать индикаторы для четырех пород: сосны, ели, березы и осины.
В другом варианте по крайней мере одна стойка коника 45 снабжена индикаторами уровня загрузки для лесоматериалов по меньшей мере из двух лесообразующих пород: 46-49 для первой лесообразующей породы, 50-53 для второй лесообразующей породы (фиг. 7).
На плотность свежесрубленной древесины влияет ее влажность. С увеличением влажность плотность возрастает, а, следовательно, возрастает масса пачки лесоматериалов на платформе лесозаготовительной машины. На влажность древесины влияет условия произрастания и в большей степени период года лесозаготовок. Например, у сосны наибольшая влажность древесины наблюдается в осенне-зимний период, у ели и осины - зимой, береза имеет наибольшую влажность в начале лета. Разница между максимумом и минимумом влажности, наблюдающаяся в течение года, достигает у сосны 17%, у ели 27%, у березы 32% и у осины 54% [Ванин С.И. Древесиноведение, 3 изд., М. - Л., 1949, С. 121].
Для учета изменения колебания плотности древесины в одном из вариантов осуществления изобретения стойка коника 54 имеет индикаторы уровня загрузки 55-58 для лесоматериалов из лесообразующей породы соответствуют сухим условиям лесозаготовки, при этом по крайней мере еще одна стойка коника 59 снабжена индикаторами уровня загрузки для лесоматериалов из лесообразующей породы для влажных условий лесозаготовки 60-63 (фиг. 8). Здесь под сухими условиями лесозаготовки понимаются условия (время года и условия произрастания) для конкретной породы, при которых влажность древесины стремится к нормальному (среднему) значению свежесрубленной древесины в регионе лесозаготовки. Под влажными условиями лесозаготовки понимаются условия (время года и условия произрастания) для конкретной породы, при которых влажность древесины стремится к максимальному значению свежесрубленной древесины в регионе заготовки.
В предпочтительном варианте осуществления изобретения индикаторы уровня загрузки для лесоматериалов из лесообразующей породы соответствуют сухим условиям лесозаготовки, при этом дополнительно стойка коника снабжена индикаторами уровня загрузки для лесоматериалов из лесообразующей породы для влажных условий лесозаготовки.
В других вариантах осуществления технического решения индикаторами уровня загрузки соответствуют разным лесообразующим породам.
Высота размещения индикаторов уровня загрузки обуславливается массой погруженных лесоматериалов. Масса лесоматериалов может быть определена любым известным способом: взвешиванием, расчетом, моделированием и т.п.
Изобретение никоим образом не ограничено вариантами осуществления, описанными выше. Напротив, имеется много возможностей модификации, которые будут очевидны для специалиста в данной области техники без отхода от основной идеи изобретения, описанной в формуле.
Использование изобретения осуществляется следующим образом. В процессе работы оператор лесозаготовительной машины, ориентируясь по индикаторам загрузки, оценивает запас по грузоподъемности и имеет возможность не допускать перегрузку машины. Это в свою очередь позволяет уменьшить вероятность отказа механизмов машины, увеличить срок службы, межремонтный интервал и периода наработки на отказ.
При сборе пачки лесоматериалов, располагая информацией о запасе по грузоподъемности, оператор может планировать движение лесной машины по вырубке, выбирая волок с необходимым объемом лесоматериалов и не заезжая на волок, где запас лесоматериалов превысит грузоподъемность машины. Это может способствовать повышению производительности работы машины за счет снижения времени на грузовой и холостой ход, а также на сбор пачки.
Кроме того, обеспечение индикации на грузовой платформе максимального уровня загрузки лесоматериалов позволяет осуществлять внешний визуальный контроль работы оператора с целью выявления случаев перегрузки лесной машины. Например, если участились случаи поломок техники мастер лесного участка может на месте провести инспекцию работы оператора путем наблюдения на расстоянии.
Таким образом, решается техническая проблема создания простого надежного технического решения, обеспечивающего индикацию предельного уровня загрузки грузовой платформы лесоматериалами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Форвардер | 2021 |
|
RU2761556C1 |
| Машина лесозаготовительная | 2017 |
|
RU2671802C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2002 |
|
RU2202877C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕК | 2002 |
|
RU2228023C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2009 |
|
RU2415564C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА ПОГРУЗКИ ЛЕСОМАТЕРИАЛОВ В РАБОЧЕЙ МАШИНЕ И ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2018 |
|
RU2755264C2 |
| СПОСОБ ЛЕСОЗАГОТОВКИ | 2012 |
|
RU2513528C2 |
| МАШИНА ДЛЯ КОМБИНИРОВАННОЙ ТРЕЛЕВКИ ЛЕСОМАТЕРИАЛОВ | 2014 |
|
RU2577887C2 |
| СПОСОБ И УСТРОЙСТВО В СИСТЕМЕ ВЗВЕШИВАНИЯ, СООТВЕТСТВУЮЩИЙ ПРОДУКТ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ И МАШИНА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ | 2014 |
|
RU2657024C2 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2007 |
|
RU2357407C2 |
Устройство относится к области подъемно-транспортного машиностроения. Грузовая платформа лесозаготовительной машины, снабженной манипулятором с захватом, включает ограждение и коники, установленные на задней полураме лесозаготовительной машины. По крайней мере одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы с выбранным шагом. Шаг обозначен, начиная с уровня загрузки лесоматериалами, минимальной длины, при которой сформированная полногрузная пачка превышает грузоподъемность лесозаготовительной машины. Достигается обеспечение индикации на грузовой платформе максимального уровня загрузки лесоматериалов, что позволяет оператору более полно и объективно оценивать запас по грузоподъемности лесозаготовительной машины при сборе и транспортировке лесоматериалов на лесосеке, планировать движение по волокам и предотвращать перегрузку лесозаготовительной машины. 5 з.п. ф-лы, 8 ил.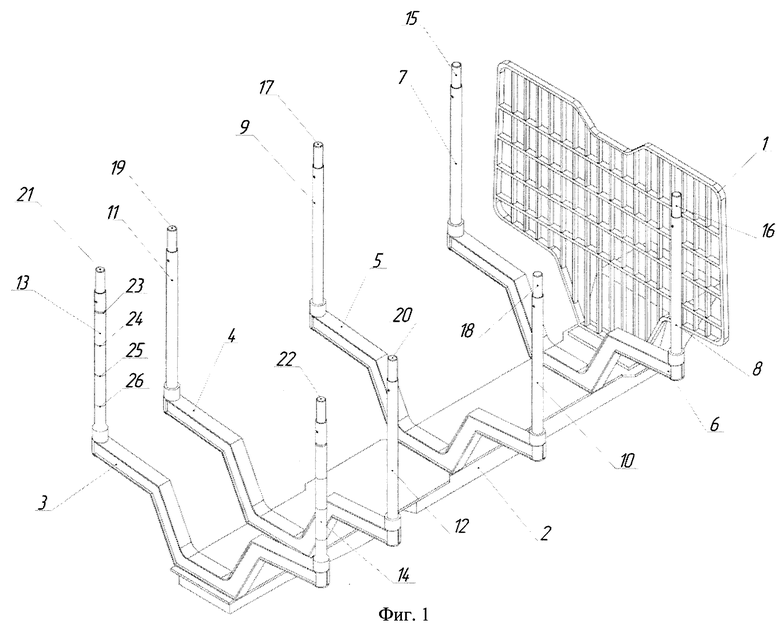
1. Грузовая платформа лесозаготовительной машины, снабженной манипулятором с захватом, включающая ограждение и коники, установленные на задней полураме лесозаготовительной машины, отличающаяся тем, что по крайней мере одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы с выбранным шагом, начиная с уровня загрузки лесоматериалами, минимальной длины, при которой сформированная полногрузная пачка превышает грузоподъемность лесозаготовительной машины.
2. Грузовая платформа по п. 1, отличающаяся тем, что по крайней мере одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов по меньшей мере двух лесообразующих пород.
3. Грузовая платформа по п. 1, отличающаяся тем, что индикаторы уровня загрузки для лесоматериалов лесообразующей породы соответствуют сухим условиям лесозаготовки, при этом по крайней мере еще одна стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы для влажных условий лесозаготовки.
4. Грузовая платформа по п. 1, отличающаяся тем, что индикаторы уровня загрузки для лесоматериалов лесообразующей породы соответствуют сухим условиям лесозаготовки, при этом дополнительно стойка коника снабжена индикаторами уровня загрузки для лесоматериалов лесообразующей породы для влажных условий лесозаготовки.
5. Грузовая платформа по любому из пп. 1-4, отличающаяся тем, что по крайней мере один индикатор уровня загрузки выполнен с возможностью перемещения вдоль стоек коника.
6. Грузовая платформа по любому из пп. 1-4, отличающаяся тем, что выбранный шаг индикаторов выполнен неравномерным.
| Способ регулировки яркости электроннолучевых трубок осциллографов | 1956 |
|
SU113215A1 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2124446C1 |
| US 2018194266 A1, 12.07.2018 | |||
| WO 2010096113 A1, 26.08.2010. | |||

