Настоящее изобретение относится к элементу для сжатия или расширения газа и способу управления таким элементом.
Более конкретно, изобретение относится к элементу, содержащему жесткий корпус, содержащий внутреннюю камеру и ротор, расположенный в упомянутой внутренней камере, причем упомянутый ротор установлен с одним или более зазорами относительно стенки внутренней камеры, причем упомянутый элемент снабжен отдельным упругим компонентом, который является позиционно регулируемым относительно упомянутого корпуса таким образом, что можно оказывать воздействие на по меньшей мере на один из упомянутых зазоров.
Из уровня техники известны элементы, в которых газ может подвергаться сжатию или расширению между входом и выходом упомянутого элемента при вращении одного или более роторов в корпусе, при этом внутренняя камера в упомянутом корпусе разделяется посредством упомянутых роторов на множество практически изолированных друг от друга рабочих камер, которые находятся под разным давлением и при вращении роторов перемещаются от упомянутого входа к упомянутому выходу.
В этом случае роторы установлены во внутренней камере с одним или более зазорами относительно стенки внутренней камеры и/или относительно друг друга для предотвращения механического контакта между роторами и стенкой внутренней камеры и/или между роторами друг с другом. Такой механический контакт может в конечном итоге приводить к чрезмерным механическим напряжениям в роторах или корпусе, которые вызывают повреждение элемента.
Данные зазоры, с одной стороны, не должны быть слишком большими, чтобы предотвратить чрезмерные потоки утечки между рабочими камерами, каковые потоки утечки снижают эффективность элемента.
С другой стороны, упомянутые зазоры не могут все время быть или оставаться уменьшенными до требуемого минимума вследствие:
- допусков на механическую обработку для компонентов элемента;
- теплового расширения компонентов элемента во время работы элемента;
- вибрации роторов во время работы элемента;
- механической нагрузки на компоненты элемента во время работы элемента в результате сжимающих усилий на один или более роторов в сочетании с чрезмерным сжатием подшипников и прогибом роторов;
- износа или осаждения грязи на поверхностях компонентов элемента со временем.
Выражение «во время работы элемента» в данном случае означает, что элемент находится в рабочем состоянии, в котором роторы элемента вращаются.
Кроме того, требуемый размер зазоров зависит от разных рабочих условий элемента.
Непосредственно после запуска элемента, когда температура элемента относительно низкая по сравнению с номинальными рабочими условиями, относительно большие зазоры способны придавать элементу механическую устойчивость.
Когда элемент работает в режиме холостого хода, в котором элемент уже вращается, но не должен подводить или получать никакой или практически никакой мощности к или от газа, относительно большие зазоры желательны также для ограничения такой подводимой или получаемой мощности по сравнению с элементом в режиме полной нагрузки.
Когда элемент работает в скоростном режиме, в котором возникают повышенные вибрации на резонансной частоте ротора (роторов) и/или подшипников, большие зазоры желательны также для обеспечения механической устойчивости элемента.
В номинальных рабочих режимах, когда температура элемента относительно высокая относительно температуры во время запуска элемента, относительно небольшие зазоры способны также обеспечивать высокую эффективность сжатия.
Это вызывало потребность в системе для активного управления зазорами в упомянутом элементе во время работы элемента.
US 10,539,137 В2 описывает компрессорный элемент, содержащий
- корпус с каналом;
- винтовой ротор, выполненный с возможностью установки с некоторым зазором ротора в упомянутом канале во время работы компрессорного элемента;
- регулируемый подшипник, например, магнитный подшипник, в котором установлен упомянутый винтовой ротор; и
- контроллер, выполненный с возможностью управления упомянутым регулируемым подшипником во время работы компрессорного элемента таким образом, что регулируемый подшипник перемещает ротор так, что зазор ротора подвергается уменьшению или увеличению.
Однако подшипники, и в частности магнитные подшипники, обычно являются довольно ненадежными компонентами компрессорного элемента, которые могут легко повреждаться во время своей работы в результате чрезмерных механических нагрузок и возникающих при этом возможных взаимных смещений между частями подшипника.
В частности, конкретным недостатком магнитного подшипника является очень малая жесткость, которая не позволяет обеспечить в достаточной степени демпфирование вибраций в элементе, возникающих вследствие пульсаций при сжатии и расширении газа, происходит. Вибрации в элементе могут приводить к значительным резким отклонениям между частями магнитного подшипника и соответственно элемента.
Таким образом, не целесообразно управлять зазорами в элементе для сжатия или расширения газа на основе взаимных положений частей подшипников.
Техническая проблема настоящего изобретения состоит в том, чтобы обеспечить решение по меньшей мере одного из вышеупомянутых и/или других недостатков, возникающих в результате управления зазорами в элементе для сжатия или расширения газа на основе взаимного расположения частей подшипника. Таким образом, технический результат, который должен быть достигнут, заключается в создании надежного, но при этом целенаправленного и гибкого управления одним или более зазорами в элементе для сжатия или расширения газа. С этой целью, изобретение относится к элементу для сжатия или расширения газа, содержащему
- жесткий корпус, содержащий внутреннюю камеру;
- ротор, расположенный в упомянутой внутренней камере и содержащий ось ротора; и
- один или более подшипников, в котором упомянутая ось ротора поддерживается, при этом ротор с его осью ротора установлен с возможностью вращения относительно упомянутого корпуса посредством данных подшипников,
причем упомянутый ротор установлен с одним или более зазорами относительно стенки внутренней камеры,
причем упомянутый элемент отличается тем, что данный элемент снабжен отдельным упругим компонентом, содержащим
- неподвижную часть, занимающую неподвижное или практически неподвижное положение относительно корпуса; и
- часть, которая является позиционно регулируемой относительно корпуса, причем упомянутая позиционно регулируемая часть выполнена с возможностью воздействия на по меньшей мере один из упомянутых зазоров,
причем упомянутый отдельный упругий компонент не прикреплен непосредственно к ротору.
В данном случае выражение «жесткий корпус» означает корпус, в котором, в рабочих условиях элемента, при деформации корпуса отклонение некоторой точки корпуса относительно других точек корпуса остается ограниченным 10 мкм.
В данном случае, выражение ось ротора «поддерживается» в одном или более подшипников, означает, что ось ротора прочно зафиксирована в своих аксиальном и радиальном направлениях относительно части упомянутого одного или более подшипников, которая совместно вращается относительно оси ротора.
Выражение «упругий компонент» в данном случае означает компонент, содержащий поверхность, точка которой под действием усилия на упомянутую поверхность, по сравнению с первоначальным положением относительно корпуса, когда упомянутое усилие не приложено к упомянутой поверхности, может быть перемещена по меньшей мере на 30 мкм в направлении упомянутого усилия без пластической деформации данного компонента.
Выражение «отдельный упругий компонент» в данном случае означает, что упругий компонент не выполнен за одно целое с корпусом. Другими словами, отдельный упругий компонент не образует часть корпуса и может быть соответственно установлен в или удален из упомянутого элемента отдельно от корпуса.
В данном случае выражение «неподвижная часть, занимающая неподвижное или практически неподвижное положение относительно корпуса» означает, что какое бы то ни было перемещение упомянутой неподвижной части относительно корпуса не оказывает существенного влияния на упомянутый один или более зазоров.
В данном случае выражение «часть, которая является позиционно регулируемой относительно корпуса» означает, что по меньшей мере одна точка упомянутой позиционно регулируемой части может смещаться относительно некоторой точки корпуса.
Преимущество состоит в том, что посредством размещения отдельного упругого компонента в жестком корпусе можно оказывать более локализованное и направленное воздействие на зазоры, чем в том случае, если бы весь корпус был реализован упругим.
Реализация упомянутого отдельного упругого компонента отдельно от корпуса облегчает также соединение друг с другом отдельного упругого компонента с корпусом из разного материала или изготовление отдельного упругого компонента и корпуса на основе разной технологии изготовления.
Посредством оказания воздействия на упомянутые зазоры может быть достигнут оптимальный баланс между предотвращением чрезмерных потоков утечки в элементе между ротором и стенкой внутренней камеры, с одной стороны, и предотвращением больших механических напряжений между ротором и корпусом в зоне стенки внутренней камеры, с другой стороны.
Кроме того, отдельный упругий компонент позволяет воздействовать на зазоры между ротором и стенкой внутренней камеры без необходимости воздействия в данном случае непосредственно на работу подшипников или на взаимные положения частей подшипников.
Преимущество также состоит в том, что позиционное регулирование отдельного упругого компонента относительно корпуса может осуществляться без необходимости учета влияния вращения ротора на отдельный упругий компонент во время работы элемента, например, такого как центробежная сила, действующая на отдельный упругий компонент.
В предпочтительном варианте осуществления элемента, один подшипник из упомянутого одного или более подшипников целиком выполнен с возможностью перемещения относительно корпуса; и упомянутая позиционно регулируемая часть выполнена с возможностью контакта с частью упомянутого подшипника, которая не вращается относительно корпуса, и в данном случае для оказания усилия на данную невращающуюся часть.
Таким образом, упомянутый подшипник целиком, совместно с ротором, подвергается смещению относительно корпуса.
В нижеописанном предпочтительном варианте осуществления элемента, упомянутая позиционно регулируемая часть выполнена с возможностью перемещения соответственно в или из по меньшей мере одного из упомянутых зазоров.
Таким образом, посредством упомянутой позиционно регулируемой части по меньшей мере один из упомянутых зазоров подвергается уплотнению или открыванию.
В нижеописанном предпочтительном варианте осуществления изобретения, упомянутый элемент содержит множество роторов, причем упомянутое множество роторов установлены с взаимным зазором таким образом, что посредством роторов во внутренней камере образуется множество практически изолированных друг от друга рабочих камер, и упомянутая позиционно регулируемая часть выполнена с возможностью изменения упомянутого взаимного зазора между роторами по размеру.
Преимущество в данном случае состоит в том, что могут быть также предотвращены чрезмерные механические напряжения и/или потоки утечки между роторами, так что упомянутые зазоры могут быть установлены оптимально для каждого рабочего режима элемента.
В нижеописанном предпочтительном варианте осуществления элемента согласно данному изобретению, упомянутый отдельный упругий компонент содержит радиальный роторный позиционер, выполненный таким образом, что ротор и корпус, с учетом оси ротора, могут быть смещены радиально относительно друг друга.
Таким образом, радиальный зазор, в соответствии с осью ротора, в элементе между ротором (роторами) и стенкой внутренней камеры и/или между роторами, может быть увеличен или уменьшен.
В более предпочтительном варианте осуществления элемента согласно данному изобретению, по меньшей мере один из вышеупомянутых подшипников представляет собой радиальный подшипник, который целиком выполнен с возможностью перемещения относительно корпуса; и упомянутый радиальный роторный позиционер содержит первый деформируемый элемент, причем упомянутый первый деформируемый элемент выполнен с возможностью контакта с частью радиального подшипника, не вращающейся относительно корпуса, и в данном случае для оказания усилия на данную невращающуюся часть.
Таким образом, упомянутый радиальный подшипник целиком, совместно с ротором, подвергается смещению относительно корпуса.
В нижеописанном предпочтительном варианте осуществления элемента согласно данному изобретению, упомянутый отдельный упругий компонент содержит аксиальный роторный позиционер, выполненный таким образом, что ротор и корпус, с учетом оси ротора, могут быть смещены аксиально относительно друг друга.
Таким образом, аксиальный зазор, в соответствии с осью ротора, в элементе между ротором и стенкой внутренней камеры, может быть увеличен или уменьшен.
Если упомянутый элемент содержит множество роторов, то взаимный зазор между роторами может быть также изменен по размеру посредством аксиального перемещения, в соответствии с его осью ротора, одного из упомянутого множества роторов относительно корпуса.
В более предпочтительном варианте осуществления элемента согласно данному изобретению, по меньшей мере один из вышеупомянутых подшипников представляет собой аксиальный подшипник, который целиком выполнен с возможностью перемещения относительно корпуса; и упомянутый аксиальный роторный позиционер содержит второй деформируемый элемент, причем упомянутый второй деформируемый элемент выполнен с возможностью контакта с частью аксиального подшипника, которая не вращается относительно корпуса, и данном случае для оказания усилия на данную невращающуюся часть.
Таким образом, упомянутый аксиальный подшипник целиком, совместно с ротором, подвергается смещению относительно корпуса.
В нижеописанном предпочтительном варианте осуществления элемента согласно данному изобретению, упомянутый отдельный упругий компонент содержит радиально адаптируемый кольцевой элемент, окружающий ось ротора, причем внешний периметр упомянутого радиально адаптируемого кольцевого элемента прочно зафиксирован относительно корпуса и упомянутый радиально адаптируемый кольцевой элемент выполнен таким образом, что внешний внутренний радиус, радиальный в соответствии с осью ротора, упомянутого радиально адаптируемого кольцевого элемента может быть изменен по размеру.
Посредством уменьшения или увеличения упомянутого внешнего внутреннего радиуса упомянутого радиально адаптируемого кольцевого элемента, радиальный зазор, в соответствии с осью ротора, в элементе между осью ротора и корпусом, может быть соответственно уплотнен или открыт посредством упомянутого радиально адаптируемого кольцевого элемента.
В нижеописанном предпочтительном варианте осуществления элемента согласно данному изобретению, упомянутая внутренняя камера содержит канал в соответствии с направлением оси ротора.
В более предпочтительном варианте осуществления данного элемента, упомянутый отдельный упругий компонент содержит аксиально адаптируемый элемент, который прикреплен к концевой поверхности упомянутого канала, причем упомянутый аксиально адаптируемый элемент имеет первую особую деформируемую форму, выполненную с возможностью уплотнения или открытию аксиального зазора, в соответствии с осью ротора, между ротором и концевой поверхностью таким образом, что первая рабочая камера во внутренней камере может быть соответственно изолирована от или сообщаться по текучей среде со второй рабочей камерой во внутренней камере.
В нижеописанном более предпочтительном варианте осуществления данного элемента, упомянутый отдельный упругий компонент содержит радиально адаптируемый элемент, прикрепленный к поверхности вращения упомянутого канала, причем упомянутый радиально адаптируемый элемент имеет вторую особую деформируемую форму, выполненную с возможностью уплотнения или открытию радиального зазора, в соответствии с осью ротора, между ротором и поверхностью вращения таким образом, что третья рабочая камера во внутренней камере может быть соответственно изолирована от или сообщаться по текучей среде с четвертой рабочей камерой во внутренней камере.
В нижеописанном предпочтительном варианте осуществления изобретения, упомянутый элемент содержит механическое, гидравлическое и/или пневматическое средство для позиционного регулирования упомянутой позиционно регулируемой части относительно корпуса.
Преимущество состоит в том, что такое механическое, гидравлическое и/или пневматическое средство является механически надежным и что упругие компоненты, которые являются позиционно регулируемыми посредством такого механического, гидравлического и/или пневматического средства, способны выдерживать более высокие механические нагрузки, чем упругие компоненты, которые являются позиционно регулируемые посредством, например, (электро)магнитных средств, как в случае с магнитным подшипником.
Другое преимущество состоит в том, что перемещение механического средства или давление для приведения в действие гидравлического или пневматического средства, может быть точно контролируемым, во всяком случае более точным, чем, например, температура для приведения в действие теплового средства, которое может вызывать тепловое расширение или сжатие позиционно регулируемой части отдельного упругого компонента.
В нижеописанном предпочтительном варианте осуществления изобретения, упомянутый элемент содержит контроллер для приведения в движение упомянутой позиционно регулируемой части.
При помощи такого контроллера может быть осуществлено воздействие на один или более упомянутых зазоров без необходимости ручного вмешательства в работу элемента человеком-оператором.
Изобретение относится к устройству для сжатия или расширения газа, содержащему элемент в соответствии с одним из вышеописанных вариантов осуществления.
Само собой разумеется, что такое устройство обладает такими же преимуществами, как и элемент в соответствии с одним из вышеописанных вариантов осуществления.
Кроме того, изобретение относится также к отдельному упругому компоненту для использования в элементе в соответствии с одним из вышеописанных вариантов осуществления или в соответствии с вышеописанным устройством.
Кроме того, изобретение относится также к способу управления элементом для сжатия или расширения газа, причем упомянутый элемент содержит
- жесткий корпус, содержащий внутреннюю камеру;
- ротор, расположенный в упомянутой внутренней камере и содержащий ось ротора; и
- один или более подшипников, в котором упомянутая ось ротора поддерживается, причем упомянутый ротор с его осью ротора установлен с возможностью вращения относительно корпуса посредством данных подшипников,
причем упомянутый ротор установлен с одним или более зазоров относительно стенки внутренней камеры,
причем упомянутый способ отличается тем, что упомянутый способ включает этап воздействия на по меньшей мере один из упомянутых зазоров посредством позиционного регулирования позиционно регулируемой части отдельного упругого компонента упомянутого элемента относительно корпуса, при этом неподвижная часть отдельного упругого компонента удерживается в неподвижном или практически неподвижном положении относительно корпуса, и
при этом данный отдельный упругий компонент не прикреплен непосредственно к ротору.
Само собой разумеется, что такое устройство обладает такими же преимуществами, как и элемент в соответствии с одним из вышеописанных вариантов осуществления.
В предпочтительном варианте осуществления способа согласно данному изобретению, управление по меньшей мере одним из упомянутого одного или более зазоров осуществляется во время работы элемента.
Преимущество в данном случае состоит в том, что во время работы управление зазорами может осуществляться на основе рабочих условий элемента и соответственно может быть установлен оптимальный баланс между предотвращением чрезмерных потоков утечки в элементе, с одной стороны, и предотвращением больших механических напряжений между ротором и корпусом в зоне стенки внутренней камеры, с другой стороны.
Для того чтобы более наглядно продемонстрировать характерные особенности изобретения, ниже в качестве примера без какого-либо ограничения описаны некоторые предпочтительные варианты осуществления элемента согласно данному изобретению для сжатия или расширения газа, со ссылкой на сопроводительные чертежи, из которых:
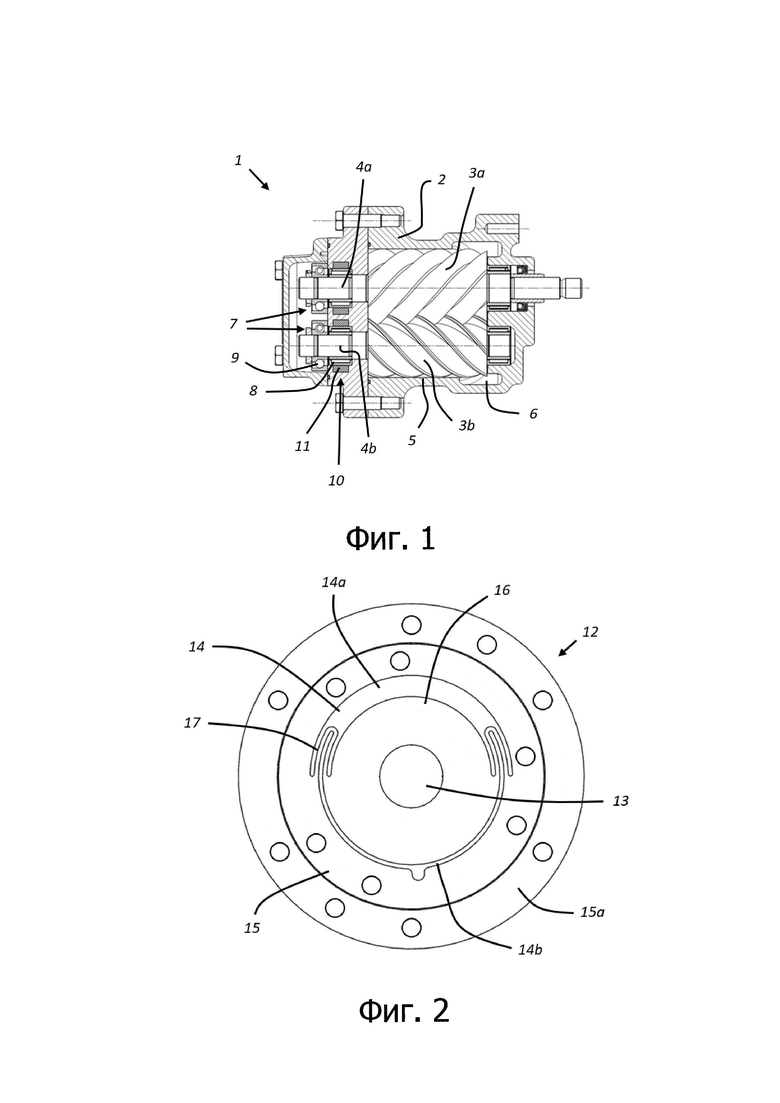
Фиг.1 показывает разрез первого варианта осуществления элемента согласно данному изобретению;
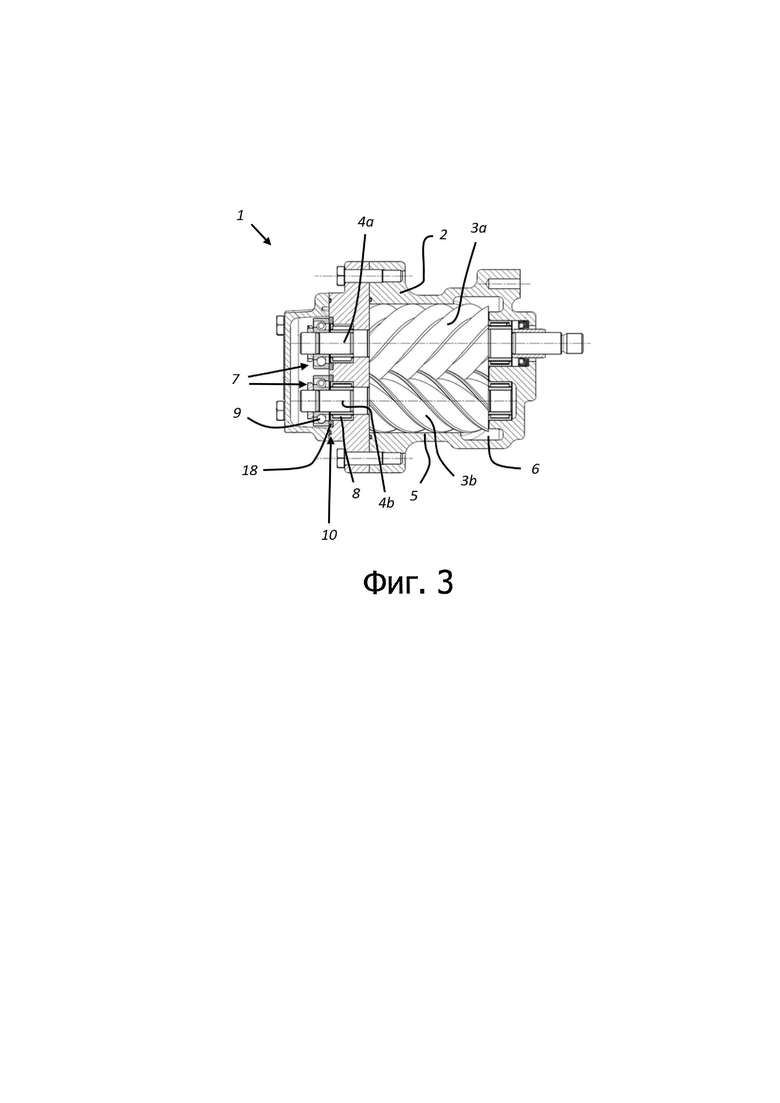
Фиг.2 показывает более подробно часть первого отдельного упругого компонента в элементе, показанном на фиг.1;
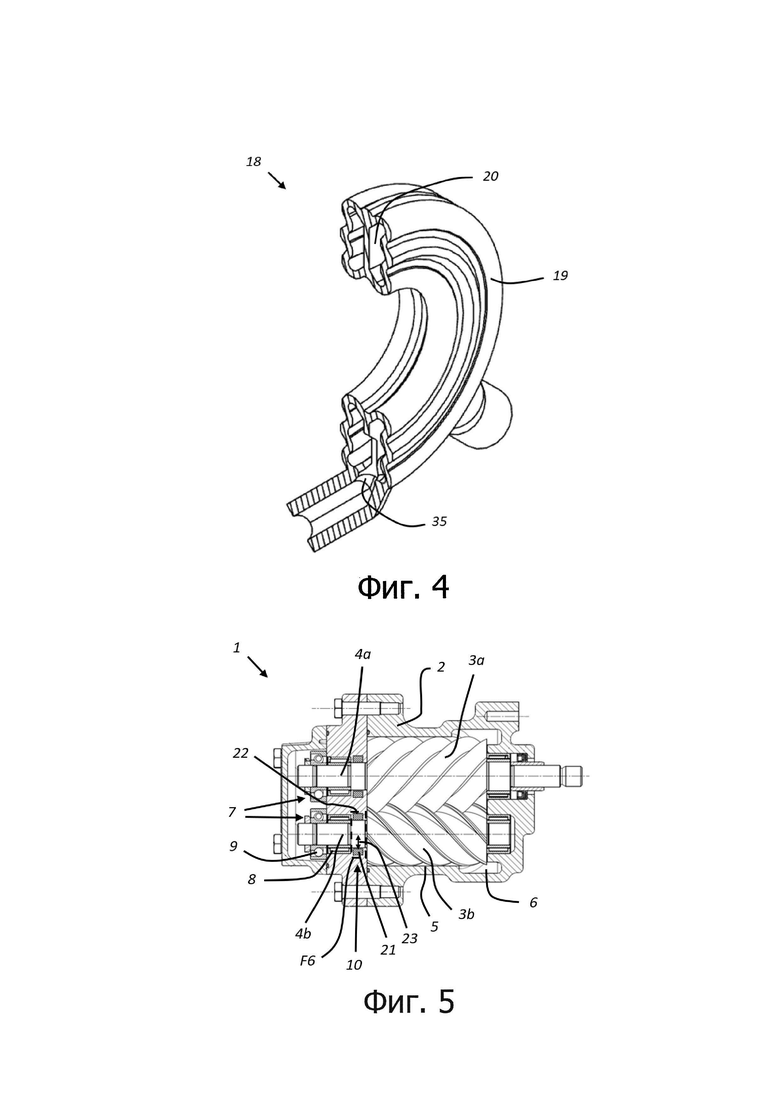
Фиг.3 показывает разрез второго альтернативного варианта осуществления элемента согласно данному изобретению;
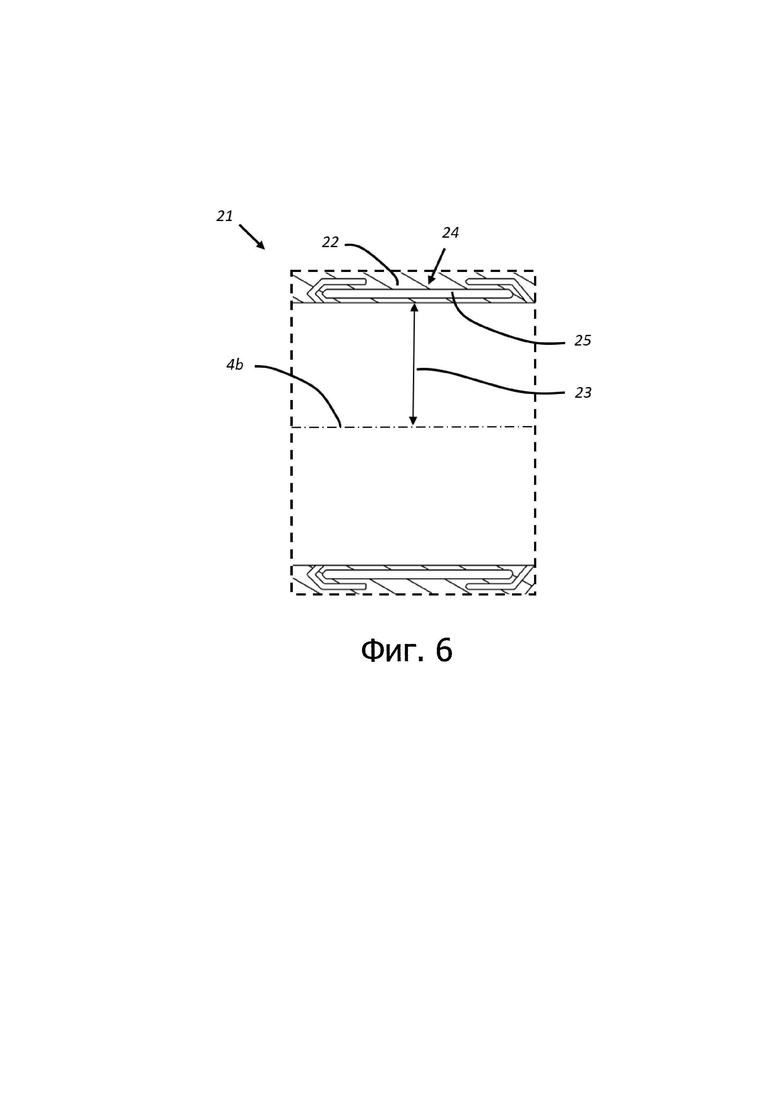
Фиг.4 показывает более подробно в разрезе второй отдельный упругий компонент в элементе, показанном на фиг.3;
Фиг.5 показывает разрез третьего альтернативного варианта осуществления элемента согласно данному изобретению;
Фиг.6 показывает более подробно в разрезе участок, обозначенный F6 на фиг.5, каковой участок показывает третий отдельный упругий компонент в элементе, показанном на фиг.5;
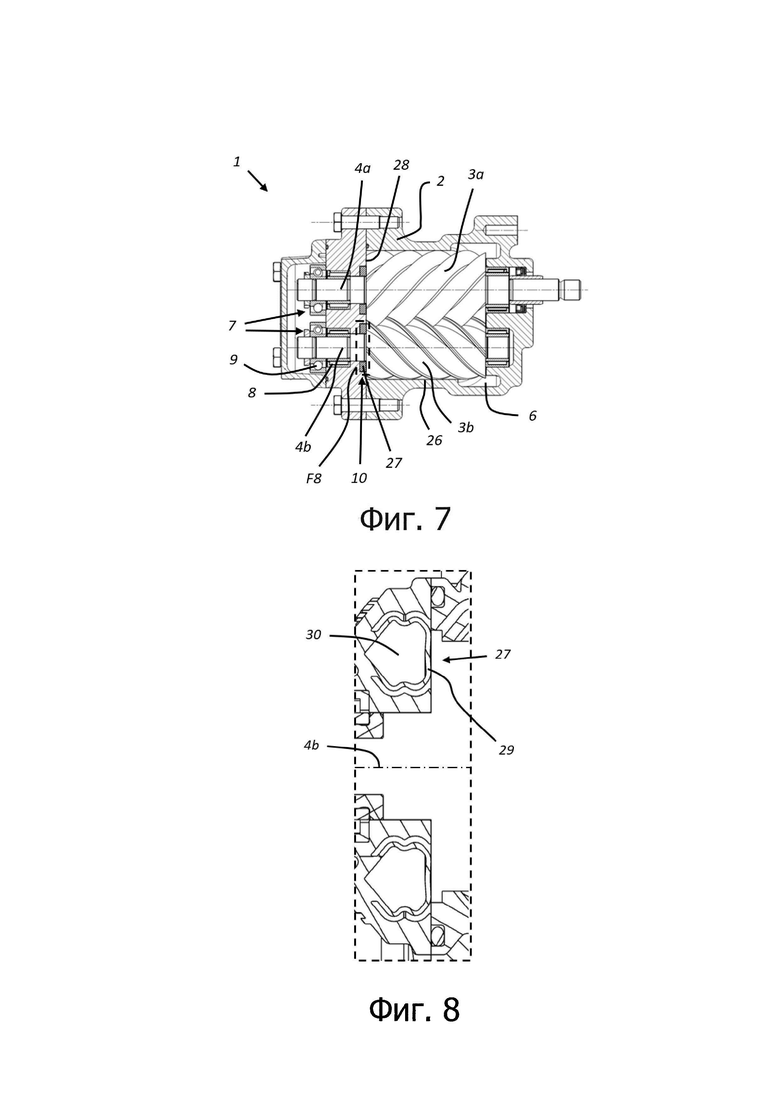
Фиг.7 показывает разрез четвертого альтернативного варианта осуществления элемента согласно данному изобретению;
Фиг.8 показывает более подробно в разрезе участок, обозначенный F8 на фиг.7, каковой участок показывает четвертый отдельный упругий компонент в элементе, показанном на фиг.7;
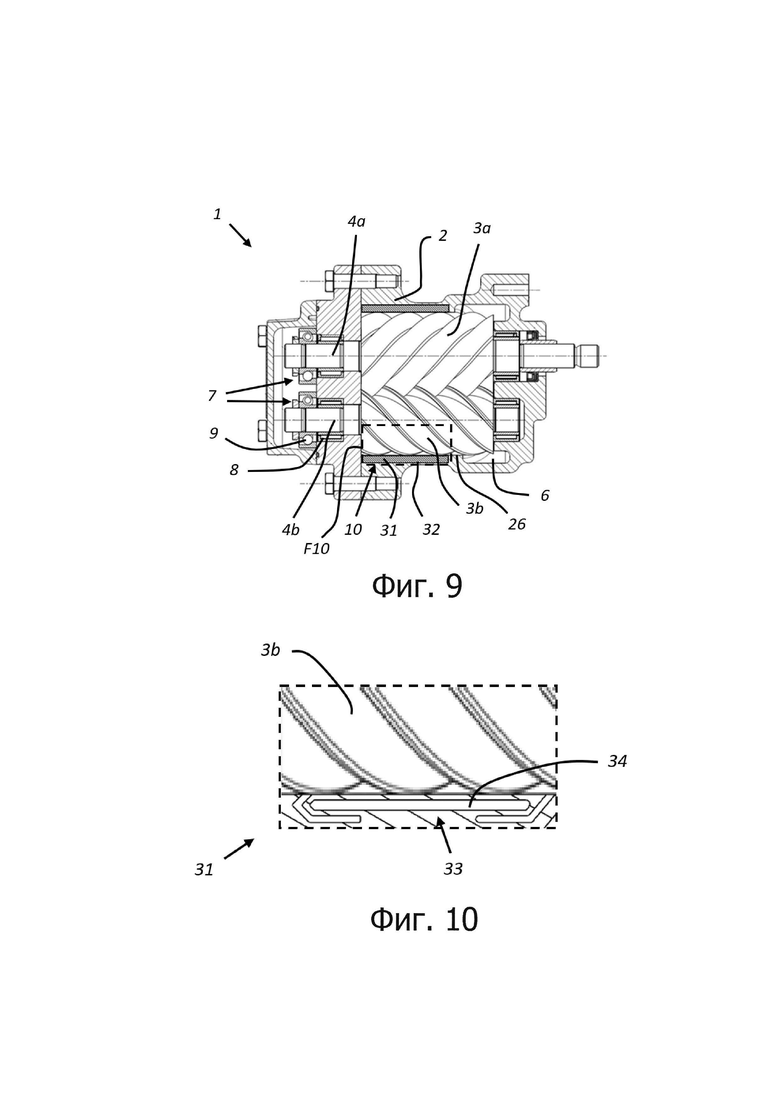
Фиг.9 показывает разрез пятого альтернативного варианта осуществления элемента согласно данному изобретению;
Фиг.10 показывает более подробно в разрезе участок, обозначенный F10 на фиг.9, каковой участок показывает пятый отдельный упругий компонент в элементе, показанном на фиг.9; и
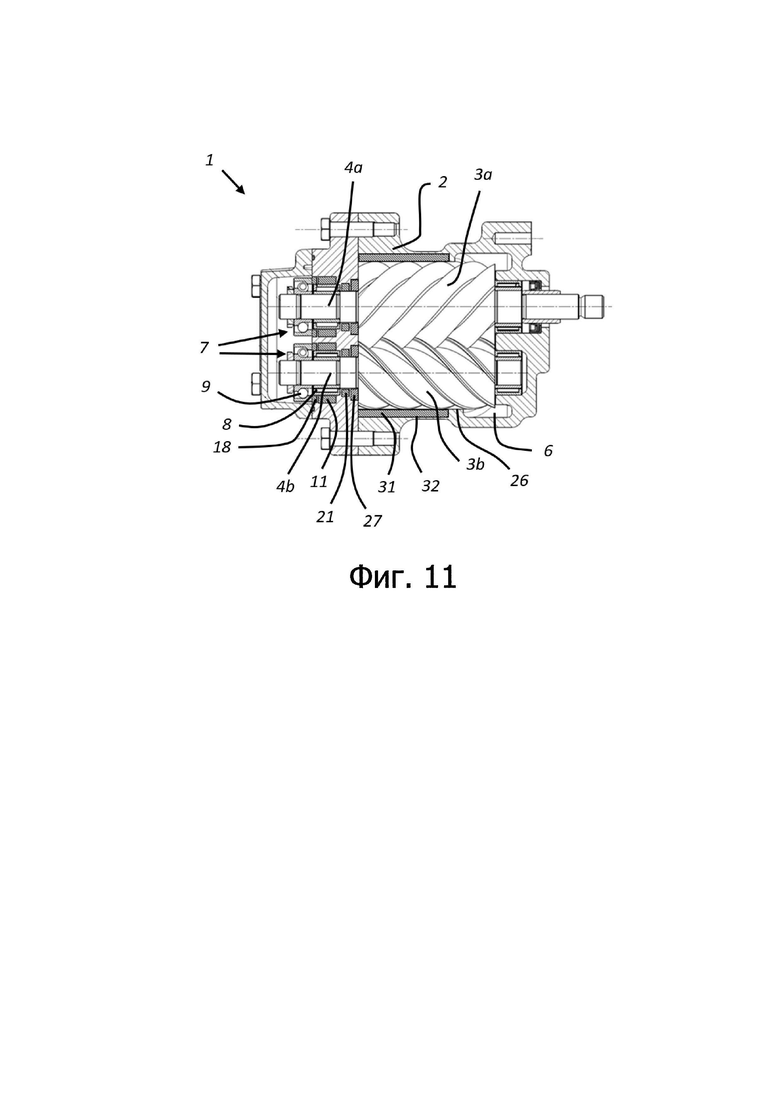
Фиг.11 показывает разрез шестого альтернативного варианта осуществления элемента согласно данному изобретению.
Используемая терминология предназначена только для описания в качестве примера предпочтительных вариантов осуществления и не должна восприниматься как ограничивающая объем патентной охраны, определенный в формуле изобретения.
Термины в единственном числе могут также обозначать данные термины во множественном числе.
Хотя термины «первый», «второй», «третий», «четвертый» или «пятый» используются ниже для обозначения разных деформируемых элементов, полостей, давлений или рабочих камер, эти деформируемые элементы, полости, давления или рабочие камеры не ограничены данными терминами. Данные термины используются главным образом только для выделения типа деформируемого элемента, полости, давления или рабочей камеры. В тех случаях, когда ниже используются такие термины как «первый», «второй», «третий», «четвертый» или «пятый», данные термины не указывают на какую-либо конкретную последовательность или порядок. А значит первый деформируемый элемент, полость, давление или рабочая камера может быть точно так же назван, например, вторым или третьим деформируемым элементом, полостью, давлением или рабочей камерой без отхода в данном случае от объема примерных вариантов осуществления. Необходимо также отметить, что может быть предусмотрено множество первых, вторых, третьих, четвертых или пятых деформируемых элементов, полостей, давлений или рабочих камер.
Фиг.1 показывает элемент 1 согласно данному изобретению для сжатия газа.
Упомянутый элемент 1 содержит жесткий корпус 2, содержащий внутреннюю камеру. Упомянутый корпус 2 в данном случае выполнен из нескольких частей, которые могут быть легко соединены друг с другом или разъединены соответственно для установки ротора 3а, 3b в или удаления его из внутренней камеры.
В элементе 1, показанном на фиг.1 расположены два ротора 3а, 3b, каждый содержащий ось 4а, 4b ротора во внутренней камере. В данном случае упомянутые два ротора 3а, 3b выполнены в виде двух находящихся во взаимном зацеплении винтовых роторов, установленных с зазорами относительно стенки 5 внутренней камеры и относительно друг друга, при этом внутренняя камера разделяется винтовыми роторами на множество рабочих камер, изолированных друг от друга, за исключением зазоров.
При вращении роторов 3а, 3b газ будет всасываться из входного отверстия 6 в рабочую камеру, соединенную с данным входным отверстием во внутренней камере. При дальнейшем вращении роторов 3а, 3b данная рабочая камера будет перемещаться аксиально, относительно оси 4а, 4b ротора, от входного отверстия 6 и будет изолирована от входного отверстия 6, после чего, при дальнейшем вращении роторов 3а, 3b, всосанный в рабочую камеру газ будет подвергаться сжатию.
Это означает, что в аксиально расположенных последовательно рабочих камерах, относительно оси 4а, 4b ротора, от входного отверстия 6, всосанный газ во внутренней камере подвергается сжатию с постоянно увеличивающимся давлением.
Вследствие разности в давлении между упомянутыми последовательно расположенными рабочими камерами, возникают потоки утечки газа через упомянутые зазоры в направлении входного отверстия 6.
Оси 4а, 4b роторов 3а, 3b опираются на подшипники 7, при этом роторы 3а, 3b со своими осями 4а, 4b установлены с возможностью вращения относительно корпуса 2 посредством подшипников 7.
Подшипники 7 могут быть реализованы в виде:
- радиального подшипника 8, способного воспринимать механическую нагрузку, радиальную относительно оси 4а, 4b ротора; и/или
- аксиального подшипника 9, способного воспринимать механическую нагрузку, аксиальную относительно оси 4а, 4b ротора.
Хотя подшипники 7, показанные на фиг.1, расположены вокруг конца оси 4а, 4b ротора, удаленного от входного отверстия 6 элемента, не исключено в пределах объема данного изобретения, что подшипники 7 расположены в конце оси 4а, 4b ротора около входного отверстия 6.
Без какого-либо предпочтения, элемент 1 в данном случае представляет собой компрессорный элемент с впрыском масла.
Не исключено в пределах объема данного изобретения, что упомянутый элемент представляет собой компрессорный элемент без впрыска масла во внутренней камере, в котором вращения роторов во внутренней камере синхронизированы, например, посредством находящихся во взаимном зацеплении зубчатых колес на осях данных роторов.
Не исключено также в пределах объема данного изобретения, что упомянутый элемент представляет собой элемент для расширения газа.
Для оказания воздействия на по меньшей мере один из упомянутых зазоров корпус 2 снабжен по меньшей мере одним отдельным упругим компонентом 10, который является позиционно регулируемым относительно корпуса 2.
Выражение «оказание воздействия на один из зазоров» означает, что посредством отдельного упругого компонента 10 минимальное поперечное сечение зазора между ротором 3а, 3b и стенкой 5 внутренней камеры или между роторами 3а, 3b
- подвергается уменьшению или увеличению; и/или
- подвергается уплотнению или открыванию.
В случае элемента 1, показанного на фиг.1, отдельный упругий компонент 10 реализован в вид радиального роторного позиционера 11, причем упомянутый радиальный роторный позиционер 11 выполнен с возможностью радиального смещения ротора 3а, 3b и корпуса 2 в соответствии с осью 4а, 4b ротора относительно друг друга.
Фиг.2 показывает более подробный и конкретный пример части такого радиального роторного позиционера 11.
Радиальный роторный позиционер 11 содержит первый деформируемый элемент 12, содержащий сквозное отверстие 13.
В сквозном отверстии 13, не вращающаяся относительно корпуса часть одного из подшипников 7, который в данном случае представляет собой радиальный подшипник 8, должна быть прочно зафиксирована.
Кроме того, первый деформируемый элемент 12 содержит в себе несколько первых полостей 14, изолированных или практически изолированных от внутренней камеры, причем каждая из первых полостей 14 находится под отдельным первым давлением, при этом в плоскости, перпендикулярной оси 4а, 4b ротора первая 14а из упомянутых первых полостей 14 расположена прямо напротив по меньшей мере одной второй 14b из данных первых полостей 14 относительно оси 4а, 4b ротора.
Первый деформируемый элемент 12 выполнен таким образом и регулируется таким образом, что, когда первое давление в первой 14а из первых полостей 14 увеличивается,
- объем упомянутой первой 14а из первых полостей 14 увеличивается; и
- первое давление в упомянутой по меньшей мере одной второй 14b из первых полостей 14 уменьшается таким образом, что объем упомянутой по меньшей мере одной второй 14b из первых полостей 14 уменьшается,
так что радиальный подшипник 8 совместно с ротором 3а, 3b подвергается смещению относительно корпуса 2 в радиальном относительно оси 4а, 4b ротора направлении к упомянутой по меньшей мере одной второй 14b из первых полостей 14.
Более конкретно, радиальный роторный позиционер 11 содержит наружное кольцо 15, внутреннее кольцо 16 и пространство, изолированное или практически изолированное от внутренней камеры, между наружным кольцом 15 и внутренним кольцом 16.
В данном случае наружное кольцо 15 прочно зафиксировано относительно корпуса 2, например, посредством фланца 15а, который представляет собой часть наружного кольца 15, а внутреннее кольцо 16 прочно прикреплено к не вращающейся относительно корпуса 2 части радиального подшипника 8.
Не исключено в данном случае в пределах объема данного изобретения, что наружное кольцо 15 прочно прикреплено к не вращающейся относительно корпуса 2 части радиального подшипника 8, а внутреннее кольцо 16 прочно прикреплено к корпусу 2.
Радиальный роторный позиционер 11 в данном случае снабжен пружинной конструкцией 17 в вышеупомянутом пространстве между наружным кольцом 15 и внутренним кольцом 16, причем пружинная конструкция 17 соединена с наружным кольцом 15 с одной стороны и с внутренним кольцом 16 с другой стороны. Таким образом, вышеупомянутое пространство разделено на множество взаимно разделенных, по существу имеющих форму сегмента круга отделений, при этом каждое из данных отделений служит одной из вышеупомянутых первых полостей 14.
Каждое из данных отделений может быть снабжено точкой подсоединения (не показанной на фиг.1 или 2) для подачи или выпуска рабочей текучей среды для увеличения или уменьшения первоначального давления в каждом из данных отделений, соответственно.
Часть радиального роторного позиционера, показанная на фиг.2, включает также дисковые уплотнительные пластины (не показанные на фиг.2), которые, в соответствии с осью 4а, 4b ротора, аксиально прикреплены к обеим сторонам наружного кольца 15 и служат для уплотнения пространства между наружным кольцом 15 и внутренним кольцом 16 в соответствии с осью 4а, 4b ротора аксиально от внутренней камеры.
Фиг.3 показывает второй альтернативный вариант осуществления элемента 1 согласно данному изобретению.
В случае элемента 1, показанного на фиг.3, отдельные упругие компоненты 10 реализованы в виде аксиального роторного позиционера 18, причем упомянутый аксиальный роторный позиционер 18 выполнен с возможностью смещения ротора 3а, 3b и корпуса 2 аксиально в соответствии с осью 4а, 4b ротора относительно друг друга.
Аксиальный роторный позиционер 18 расположен между корпусом 2 и не вращающейся относительно корпуса 2 частью по меньшей мере одного из подшипников 7, который в данном случае должен быть аксиальным подшипником 9.
Фиг.4 показывает более подробный и конкретный пример такого аксиального роторного позиционера 18.
Аксиальный роторный позиционер 18 содержит второй деформируемый элемент, который содержит в себе вторую полость 20, изолированную или практически изолированную от внутренней камеры.
В данном случае, второй деформируемый элемент 19 выполнен и регулируется таким образом, что аксиальный, в соответствии с осью 4а, 4b ротора, размер второго деформируемого элемента 19 увеличивается или уменьшается при увеличении или уменьшении второго давления во второй полости 20, соответственно.
С этой целью, второй деформируемый элемент 19 может быть снабжен точкой 35 подсоединения для подачи или выпуска рабочей текучей среды для увеличения или уменьшения второго давления во второй полости 20, соответственно.
При увеличении аксиального размера второго деформируемого элемента 19, второй деформируемый элемент 19 смещает аксиальный подшипник 9 совместно с ротором 3а, 3b в аксиальном направлении, в соответствии с осью 4а, 4b ротора, относительно корпуса 2. При уменьшении аксиального размера второго деформируемого элемента 19, аксиальный подшипник 9 и ротор 3а, 3b могут возвращаться в свое первоначальное положение аксиально в соответствии с осью 4а, 4b ротора.
Таким образом, аксиальный зазор в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и корпусом 2 может быть увеличен или уменьшен.
Фиг.5 показывает третий альтернативный вариант осуществления элемента 1 согласно данному изобретению.
В случае элемента 1, показанного на фиг.5, отдельные упругие компоненты 10 реализованы в виде радиально адаптируемого кольцевого элемента 21, окружающего ось 4а, 4b ротора. Внешний периметр 22 радиально адаптируемого кольцевого элемента 21 прочно зафиксирован относительно корпуса 2. Кроме того, радиально адаптируемый кольцевой элемент 21 выполнен таким образом, что радиальный внешний внутренний радиус 23 в соответствии с осью 4а, 4b ротора радиально адаптируемого кольцевого элемента 21 может быть изменен по размеру.
«Радиальный внешний внутренний радиус в соответствии с осью ротора радиально адаптируемого кольцевого элемента» означает прямой радиус
- расположенный в плоскости, перпендикулярной оси 4а, 4b ротора;
- первая конечная точка которого расположена на оси 4а, 4b ротора;
- вторая конечная точка которого является точкой радиально адаптируемого кольцевого элемента 21; и
- каждая точка которого между первой конечной точкой и второй конечной точкой не является точкой радиально адаптируемого кольцевого элемента.
Фиг.6 показывает более подробный и конкретный пример радиально адаптируемого кольцевого элемента 21.
Радиально адаптируемый кольцевой элемент 21 содержит кольцеобразный третий деформируемый элемент 24, который содержит в себе третью полость 25, изолированную или практически изолированную от внутренней камеры.
Упомянутый третий деформируемый элемент 24 выполнен таким образом, что радиальный внешний внутренний радиус 243 в соответствии с осью 4а, 4b ротора уменьшается или увеличивается при увеличении или уменьшении третьего давления в третьей полости 25, соответственно.
С этой целью, третий деформируемый элемент 24 может быть снабжен точкой подсоединения (не показанной на фиг.5 или 6) для подачи или выпуска рабочей текучей среды для увеличения или уменьшения третьего давления в третьей полости 25, соответственно.
При уменьшении радиального внешнего внутреннего радиуса 23, радиально адаптируемый кольцевой элемент 21 расширяется радиально внутрь вокруг оси 4а, 4b ротора в соответствии с осью 4а, 4b ротора. Соответственно, при увеличении радиального внешнего внутреннего радиуса 23 радиальное расстояние в соответствии с осью 4а, 4b ротора между радиально адаптируемым кольцевым элементом 21 и осью 4а, 4b ротора соответственно увеличивается.
Таким образом, радиальный зазор в соответствии с осью 4а, 4b ротора между осью 4а, 4b ротора и корпусом 2 может быть соответственно уменьшен или увеличен.
Фиг.7 показывает четвертый альтернативный вариант осуществления элемента 1 согласно данному изобретению.
Внутренняя камера содержит канал 26 в соответствии с направлением оси 4а, 4b ротора.
В случае элемента 1, показанного на фиг.7, отдельные упругие компоненты 10 реализованы в виде аксиально адаптируемого элемента 27, который прикреплен к концевой поверхности 28 канала 26.
Данный аксиально адаптируемый элемент 27 имеет первую особую деформируемую форму, выполненную с возможностью уплотнения и разуплотнения аксиального зазора в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и концевой поверхностью 28 таким образом, что первая рабочая камера во внутренней камере может быть соответственно изолирована от или сообщаться по текучей среде со второй рабочей камерой во внутренней камере.
Хотя концевая поверхность 28, показанная на фиг.7, расположена на стороне канала 26, удаленной от входного отверстия 6 элемента, не исключено в пределах объема данного изобретения, что упомянутая концевая поверхность расположена на стороне канала 26 около входного отверстия 6.
Фиг.8 показывает более подробный и конкретный пример аксиально адаптируемого элемента 27.
Аксиально адаптируемый элемент 27 содержит четвертый деформируемый элемент 29, который содержит в себе четвертую полость 30, изолированную или практически изолированную от внутренней камеры.
Четвертый деформируемый элемент 29 выполнен таким образом, что аксиальный размер в соответствии с осью 4а, 4b ротора четвертого деформируемого элемента 29 увеличивается или уменьшается при увеличении или уменьшении четвертого давления в четвертой полости 30, соответственно.
С этой целью четвертый деформируемый элемент 29 может быть снабжен точкой подсоединения (не показанной на фиг.7 или 8) для подачи или выпуска рабочей текучей среды для увеличения или уменьшения четвертого давления в четвертой полости 30, соответственно.
При увеличении аксиального размера в соответствии с осью 4а, 4b ротора четвертого деформируемого элемента 29, четвертый деформируемый элемент 29 увеличивается относительно ротора 3а, 3b в аксиальном направлении в соответствии с осью 4а, 4b ротора. В результате аксиальный зазор в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и корпусом 2 может быть уплотнен таким образом, что вышеупомянутая первая рабочая камера во внутренней камере может быть изолирована от вышеупомянутой второй рабочей камеры во внутренней камере.
Соответственно, при уменьшении аксиального размера в соответствии с осью 4а, 4b ротора четвертого деформируемого элемента 29, четвертый деформируемый элемент 29 ротора 3а, 3b уменьшается в аксиальном направлении в соответствии с осью 4а, 4b ротора. В результате аксиальный зазор в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и корпусом 2 соответственно разуплотняется таким образом, что вышеупомянутая первая рабочая камера во внутренней камере сообщается по текучей среде с вышеупомянутой второй рабочей камерой во внутренней камере.
Не исключено в пределах объема данного изобретения, что в том случае, если элемент содержит множество роторов, зазор между концевой поверхностью с одной стороны и обоими роторами с другой стороны может быть уплотнен или открыт посредством одного и того же аксиально адаптируемого элемента.
Фиг.9 показывает пятый альтернативный вариант осуществления элемента 1 согласно данному изобретению.
В данном пятом варианте осуществления, внутренняя камера также содержит канал 26 в соответствии с направлением оси 4а, 4b ротора.
В случае элемента 1, показанного на фиг.9, отдельные упругие компоненты 10 реализованы в виде радиально адаптируемого элемента 31, прикрепленного к поверхности вращения 32 канала 26.
Упомянутый радиально адаптируемый элемент 31 имеет вторую особую деформируемую форму, выполненную с возможностью уплотнения и разуплотнения радиального зазора в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и поверхностью вращения 32 таким образом, что третья рабочая камера во внутренней камере может быть соответственно изолирована или сообщаться по текучей среде с четвертой рабочей камерой во внутренней камере.
Фиг.10 показывает более подробный и конкретный пример радиально адаптируемого элемента 31.
Радиально адаптируемый элемент 31 содержит пятый деформируемый элемент 33, который содержит в себе пятую полость 34, изолированную или практически изолированную от внутренней камеры.
Упомянутый пятый деформируемый элемент 33 выполнен таким образом, что радиальный размер в соответствии с осью 4а, 4b ротора пятого деформируемого элемента 33 увеличивается или уменьшается при увеличении или уменьшении пятого давления в пятой полости 34, соответственно.
С этой целью пятый деформируемый элемент 33 может быть снабжен точкой подсоединения (не показанной на фиг.9 или 10) для подачи или выпуска рабочей текучей среды для увеличения или уменьшения пятого давления в пятой полости 34, соответственно.
При увеличении радиального размера в соответствии с осью 4а, 4b ротора пятого деформируемого элемента 33, пятый деформируемый элемент 33 увеличивается относительно ротора 3а, 3b в радиальном относительно оси 4а, 4b ротора направлении. В результате радиальный зазор в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и корпусом 2 может быть уплотнен таким образом, что вышеупомянутая третья рабочая камера во внутренней камере может быть изолирована от вышеупомянутой четвертой рабочей камеры во внутренней камере.
Соответственно, при уменьшении радиального размера в соответствии с осью 4а, 4b ротора пятого деформируемого элемента 33, пятый деформируемый элемент 33 ротора 3а, 3b уменьшается в радиальном относительно оси 4а, 4b ротора направлении. В результате радиальный зазор в соответствии с осью 4а, 4b ротора между ротором 3а, 3b и корпусом 2 соответственно разуплотняется таким образом, что вышеупомянутая третья рабочая камера во внутренней камере соответственно сообщается по текучей среде с вышеупомянутой четвертой рабочей камерой во внутренней камере.
Не исключено в пределах объема данного изобретения, что в том случае, если элемент содержит множество роторов, посредством одного и того же радиально адаптируемого элемента зазор между поверхностью вращения канала с одной стороны и обоими роторами с другой стороны может быть уплотнен или разуплотнен.
Фиг.11 показывает шестой альтернативный вариант осуществления элемента 1 согласно данному изобретению.
В упомянутом шестом альтернативном варианте осуществления, корпус 2 снабжен всеми вышеописанными разными типами отдельных упругих компонентов 10.
Упомянутый элемент 1 может также содержать механическое, гидравлическое и/или пневматическое средство для позиционного регулирования отдельных упругих компонентов 10, такое как, например, механический привод или гидравлическая или пневматическая схема.
Кроме того, элемент 1 может также содержать контроллер для приведения в движение отдельных упругих компонентов 10.
Управление зазорами может осуществляться, когда элемент не функционирует, и/или управление может осуществляться на основе заданной величины до приведения в действие элемента 1.
Управление зазорами может также осуществляться, когда упомянутый элемент 1 функционирует.
Управление зазорами может осуществляться на основе:
- измерения рабочих характеристик элемента 1;
- измерений вибрации; и/или
- непосредственного измерения зазоров.
Разумеется, не исключено в пределах объема данного изобретения, что корпус 2 снабжен только некоторыми из данных разных типов отдельных упругих компонентов 10.
Не исключено также в пределах объема данного изобретения, что отдельный упругий компонент объединяет в себе несколько технических характеристик или функций вышеописанных отдельных упругих компонентов 10.
Не исключено также, что элемент 1 не является винтовым компрессорным элементом. Другими возможностями являются, например, элемент винтового вентилятора, элемент винтового вакуумного насоса, элемент винтового расширителя, элемент зубчатого компрессора, элемент зубчатого вентилятора, элемент зубчатого вакуумного насоса, элемент зубчатого расширителя, элемент шестеренчатого компрессора, элемент шестеренчатого вентилятора, элемент шестеренчатого вакуумного насоса, элемент шестеренчатого расширителя, элемент турбокомпрессора, элемент турбовентилятора, элемент вакуумного турбонасоса или элемент турборасширителя.
Изобретение никоим образом не ограничено вариантами осуществления, описанными в качестве примера и показанными в чертежах, при этом элемент согласно данному изобретению для сжатия или расширения газа может быть реализован в нескольких вариантах, формах и размерах без отхода от объема данного изобретения, определенного в формуле изобретения.
Группа изобретений относится к элементу и устройству для сжатия или расширения газа, способу управления элементом и упругому компоненту для использования в элементе. Элемент содержит жесткий корпус (2), включающий внутреннюю камеру, по меньшей мере один ротор (3а, 3b), расположенный во внутренней камере и содержащий ось (4а, 4b), один или более подшипников (7), в котором ось (4а, 4b) ротора (3а, 3b) поддерживается. Ротор (3а, 3b) с осью (4а, 4b) установлен с возможностью вращения относительно корпуса (2) посредством подшипников (7). Ротор (3а, 3b) установлен с одним или более зазорами относительно стенки (5) внутренней камеры. Элемент (1) снабжен отдельным упругим компонентом (10), содержащим неподвижную часть, имеющую неподвижное положение относительно корпуса (2), и позиционно регулируемую часть относительно корпуса (2). Позиционно регулируемая часть выполнена с возможностью оказания воздействия на по меньшей мере один из зазоров. Компонент (10) не прикреплен непосредственно к ротору (3а, 3b). Группа изобретений направлена на создание надежного, но при этом целенаправленного и гибкого управления одним или более зазорами в элементе для сжатия или расширения газа. 4 н. и 25 з.п. ф-лы, 11 ил.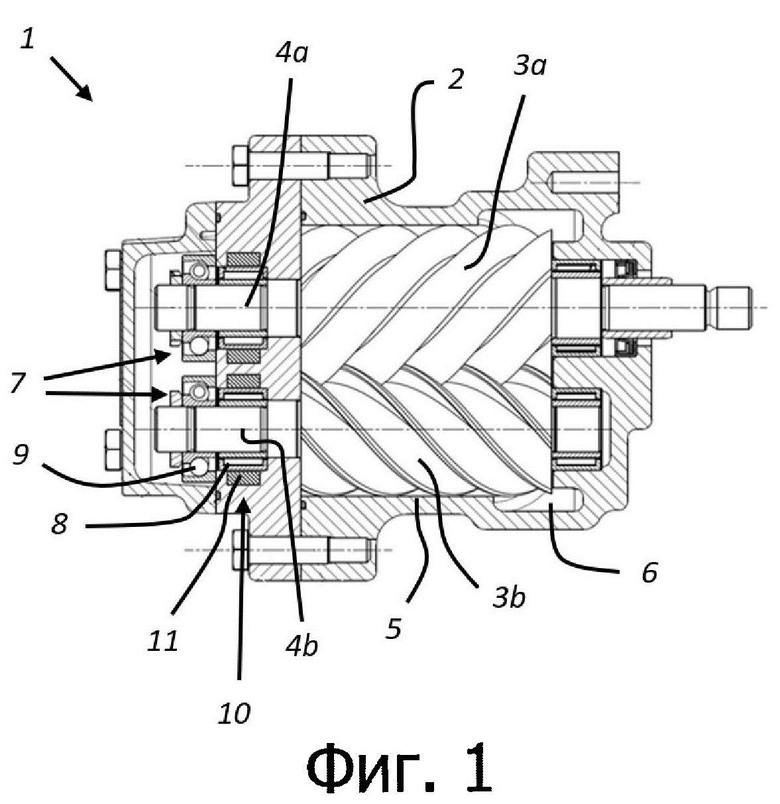
1. Элемент для сжатия или расширения газа, содержащий
- жесткий корпус (2), содержащий внутреннюю камеру;
- по меньшей мере один ротор (3а, 3b), расположенный во внутренней камере и содержащий ось (4а, 4b) ротора;
- один или более подшипников (7), в котором упомянутая ось (4а, 4b) ротора (3а, 3b) поддерживается, причем упомянутый ротор (3а, 3b) с его осью (4а, 4b) ротора установлен с возможностью вращения относительно корпуса (2) посредством данных подшипников (7),
при этом ротор (3а, 3b) установлен с одним или более зазорами относительно стенки (5) внутренней камеры;
отличающийся тем, что элемент (1) снабжен отдельным упругим компонентом (10), содержащим
- неподвижную часть, имеющую неподвижное положение относительно корпуса (2); и
- позиционно регулируемую часть относительно корпуса (2), причем упомянутая позиционно регулируемая часть выполнена с возможностью оказания воздействия на по меньшей мере один из упомянутых зазоров,
причем отдельный упругий компонент (10) не прикреплен непосредственно к ротору (3а, 3b).
2. Элемент по п.1, отличающийся тем, что один подшипник из упомянутого одного или более подшипников (7) целиком выполнен с возможностью перемещения относительно корпуса (2); причем упомянутая позиционно регулируемая часть выполнена с возможностью контакта с не вращающейся относительно корпуса (2) частью упомянутого подшипника и в данном случае для оказания усилия на данную невращающуюся часть таким образом, что упомянутый подшипник целиком совместно с ротором (3а, 3b) подвергается смещению относительно корпуса (2).
3. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутая позиционно регулируемая часть выполнена с возможностью перемещения соответственно в или из по меньшей мере одного из зазоров таким образом, что упомянутый по меньшей мере один из зазоров уплотняется или открывается посредством упомянутой позиционно регулируемой части.
4. Элемент по одному из предыдущих пунктов, отличающийся тем, что элемент (1) содержит множество роторов (3а, 3b), причем упомянутое множество роторов (3а, 3b) установлены с взаимным зазором таким образом, что посредством множества роторов (3а, 3b) во внутренней камере образуется множество изолированных рабочих камер; и
упомянутая позиционно регулируемая часть выполнена с возможностью изменения размера упомянутого взаимного зазора.
5. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутый отдельный упругий компонент (10) содержит радиальный роторный позиционер (11), выполненный таким образом, что ротор (3а, 3b) и корпус (2), относительно оси (4а, 4b) ротора, могут быть смещены радиально относительно друг друга.
6. Элемент по п.5, отличающийся тем, что по меньшей мере один из вышеупомянутых подшипников (7) представляет собой радиальный подшипник (8), который целиком выполнен с возможностью перемещения относительно корпуса (2); и
причем упомянутый радиальный роторный позиционер (11) содержит первый деформируемый элемент (12), причем упомянутый первый деформируемый элемент (12) выполнен с возможностью контакта с не вращающейся относительно корпуса (2) частью радиального подшипника (8) и в данном случае для оказания усилия на данную невращающуюся часть таким образом, что радиальный подшипник (8) целиком совместно с ротором (3а, 3b) подвергается смещению относительно корпуса (2).
7. Элемент по п.6, отличающийся тем, что упомянутый первый деформируемый элемент (12) содержит в себе несколько первых полостей (14), изолированных от внутренней камеры, причем каждая из упомянутых первых полостей (14) находится под первым давлением,
при этом в плоскости, перпендикулярной оси (4а, 4b) ротора, первая (14а) из данных первых полостей (14) расположена прямо напротив по меньшей мере одной второй (14b) из данных первых полостей (14) относительно оси (4а, 4b) ротора,
при этом упомянутый первый деформируемый элемент (12) выполнен таким образом, что, когда первое давление в упомянутой первой (14а) из упомянутых первых полостей (14) увеличивается, объем упомянутой первой (14а) из упомянутых первых полостей (14) увеличивается, и первое давление в упомянутой по меньшей мере одной второй (14b) из упомянутых первых полостей (14) уменьшается таким образом, что объем упомянутой по меньшей мере одной второй (14b) из упомянутых первых полостей (14) уменьшается, так что ось (4а, 4b) ротора в радиальном направлении относительно оси (4а, 4b) ротора смещается к упомянутой по меньшей мере одной второй (14b) из упомянутых первых полостей (14).
8. Элемент по п.7, отличающийся тем, что радиальный роторный позиционер (11) содержит наружное кольцо (15), внутреннее кольцо (16) и пространство, изолированное от внутренней камеры, между наружным кольцом (15) и внутренним кольцом (16),
при этом наружное кольцо (15) прочно зафиксировано относительно корпуса (2) и внутреннее кольцо (16) прочно прикреплено к не вращающейся относительно корпуса (2) части радиального подшипника (8), или наоборот, и
при этом упомянутый радиальный роторный позиционер (11) в вышеупомянутом пространстве снабжен пружинной конструкцией (17), которая соединена с наружным кольцом (15) с одной стороны и с внутренним кольцом (16) с другой стороны таким образом, что вышеупомянутое пространство разделено на множество взаимно изолированных друг от друга по существу имеющих форму сегмента круга отделений, причем каждое из данных отделений служит одной из вышеупомянутых первых полостей (14).
9. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутый отдельный упругий компонент (10) содержит аксиальный роторный позиционер (18), выполненный таким образом, что ротор (3а, 3b) и корпус (2), относительно оси (4а, 4b) ротора, могут быть смещены аксиально относительно друг друга.
10. Элемент по п.9, отличающийся тем, что по меньшей мере один из вышеупомянутых подшипников (7) представляет собой аксиальный подшипник (9), который выполнен с возможностью перемещения целиком относительно корпуса (2); и
что аксиальный роторный позиционер (18) содержит второй деформируемый элемент (19), причем упомянутый второй деформируемый элемент (19) выполнен с возможностью контакта с не вращающейся относительно корпуса (2) частью аксиального подшипника (9) и в данном случае для оказания усилия на упомянутую невращающуюся часть таким образом, что аксиальный подшипник (9) целиком совместно с ротором (3а, 3b) подвергается смещению относительно корпуса (2).
11. Элемент по п.10, отличающийся тем, что упомянутый второй деформируемый элемент (19) содержит в себе вторую полость (20), изолированную от внутренней камеры, причем упомянутый второй деформируемый элемент (19) выполнен таким образом, что аксиальный размер второго деформируемого элемента (19) в соответствии с осью (4а, 4b) ротора увеличивается или уменьшается, когда второе давление во второй полости (20) увеличивается или уменьшается, соответственно.
12. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутый отдельный упругий компонент (10) содержит радиально адаптируемый кольцевой элемент (21), окружающий ось (4а, 4b) ротора,
при этом внешний периметр (22) радиально адаптируемого кольцевого элемента (21) прочно зафиксирован относительно корпуса (2) и при этом радиально адаптируемый кольцевой элемент (21) выполнен таким образом, что радиальный внешний внутренний радиус (23) радиально адаптируемого кольцевого элемента (21) в соответствии с осью (4а, 4b) ротора может быть изменен по размеру.
13. Элемент по п.12, отличающийся тем, что вышеупомянутый радиально адаптируемый кольцевой элемент (21) содержит кольцеобразный третий деформируемый элемент (24), который содержит в себе третью полость (25), изолированную от внутренней камеры, причем упомянутый третий деформируемый элемент (24) выполнен таким образом, что радиальный внешний внутренний радиус (23) в соответствии с осью (4а, 4b) ротора уменьшается или увеличивается, когда третье давление в третьей полости (25) увеличивается или уменьшается, соответственно.
14. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутая внутренняя камера содержит канал (26) в соответствии с направлением оси (4а, 4b) ротора.
15. Элемент по п.14, отличающийся тем, что упомянутый отдельный упругий компонент (10) содержит аксиально адаптируемый элемент (27), который прикреплен к концевой поверхности (28) канала (26), причем упомянутый аксиально адаптируемый элемент (27) имеет первую особую деформируемую форму, выполненную с возможностью уплотнения и открывания аксиального зазора в соответствии с осью (4а, 4b) ротора между ротором (3а, 3b) и концевой поверхностью (28) таким образом, что первая рабочая камера во внутренней камере может быть соответственно изолирована от или сообщаться по текучей среде со второй рабочей камерой во внутренней камере.
16. Элемент по п.15, отличающийся тем, что вышеупомянутый аксиально адаптируемый элемент (27) содержит четвертый деформируемый элемент (29), который содержит в себе четвертую полость (30), изолированную от внутренней камеры, причем упомянутый четвертый деформируемый элемент (29) выполнен таким образом, что аксиальный размер четвертого деформируемого элемента (29) в соответствии с осью (4а, 4b) ротора увеличивается или уменьшается, когда четвертое давление в четвертой полости (30) увеличивается или уменьшается, соответственно.
17. Элемент по одному из предыдущих пп.14-16, отличающийся тем, что упомянутый отдельный упругий компонент (10) содержит радиально адаптируемый элемент (31), прикрепленный к поверхности вращения (32) канала (26), причем упомянутый радиально адаптируемый элемент (31) имеет вторую особую деформируемую форму, выполненную с возможностью уплотнения или открытия радиального зазора в соответствии с осью (4а, 4b) ротора между ротором (3а, 3b) и поверхностью вращения (32) таким образом, что третья рабочая камера во внутренней камере может быть соответственно изолирована от или сообщаться по текучей среде с четвертой рабочей камерой во внутренней камере.
18. Элемент по п.17, отличающийся тем, что вышеупомянутый радиально адаптируемый элемент (31) содержит пятый деформируемый элемент (33), который содержит в себе пятую полость (34), изолированную от внутренней камеры, причем упомянутый пятый деформируемый элемент (33) выполнен таким образом, что радиальный размер пятого деформируемого элемента (33) в соответствии с осью (4а, 4b) ротора увеличивается или уменьшается, когда пятое давление в пятой полости (34) увеличивается или уменьшается, соответственно.
19. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутый элемент (1) содержит механическое, гидравлическое и/или пневматическое средство для позиционного регулирования упомянутой позиционно регулируемой части относительно корпуса (2).
20. Элемент по одному из предыдущих пунктов, отличающийся тем, что упомянутый элемент (1) содержит контроллер для приведения в действие упомянутой позиционно регулируемой части.
21. Устройство для сжатия или расширения газа, содержащее элемент (1) по одному из предыдущих пунктов.
22. Отдельный упругий компонент (10) для использования в элементе (1) по одному из предыдущих пп.1-20 или устройстве по п.21.
23. Способ управления элементом для сжатия или расширения газа, причем упомянутый элемент (1) содержит
- жесткий корпус (2), содержащий внутреннюю камеру;
- по меньшей мере один ротор (3а, 3b), расположенный в упомянутой внутренней камере и содержащий ось (4а, 4b) ротора; и
- один или более подшипников (7), в котором упомянутая ось (4а, 4b) ротора (3а, 3b) поддерживается, причем упомянутый ротор (3а, 3b) с его осью (4а, 4b) ротора установлен с возможностью вращения относительно корпуса (2) посредством данных подшипников (7),
при этом ротор (3а, 3b) установлен с одним или более зазорами относительно стенки (5) внутренней камеры,
отличающийся тем, что упомянутый способ включает этап, на котором воздействуют на по меньшей мере один из упомянутых зазоров посредством позиционного регулирования позиционно регулируемой части отдельного упругого компонента (10) элемента (1) относительно корпуса (2),
при этом неподвижную часть отдельного упругого компонента (10) удерживают в неподвижном положении относительно корпуса (2), и
при этом данный отдельный упругий компонент (10) не прикрепляют непосредственно к ротору (3а, 3b).
24. Способ по п.23, отличающийся тем, что один подшипник из упомянутого одного или более подшипников (7) размещают с возможностью перемещения целиком относительно корпуса (2), и тем, что при оказании воздействия на по меньшей мере один из упомянутых зазоров упомянутая позиционно регулируемая часть входит в контакт с не вращающейся относительно корпуса (2) частью упомянутого подшипника и в данном случае оказывает усилие на упомянутую невращающуюся часть таким образом, что упомянутый подшипник целиком совместно с ротором (3а, 3b) подвергается смещению относительно корпуса (2).
25. Способ по п.23 или 24, отличающийся тем, что упомянутая позиционно регулируемая часть соответственно перемещается в или из по меньшей мере одного из зазоров таким образом, что упомянутый по меньшей мере один из зазоров подвергается уплотнению или открыванию посредством упомянутой позиционно регулируемой части.
26. Способ по одному из предыдущих пп.23-25, отличающийся тем, что элемент (1) содержит множество роторов (3а, 3b), причем упомянутое множество роторов (3а, 3b) установлены с взаимным зазором таким образом, что посредством роторов (3а, 3b) во внутренней камере образуется одна или множество взаимно изолированных друг от друга рабочих камер, и
при этом упомянутый способ включает этап, на котором изменяют размер упомянутого взаимного зазора посредством позиционного регулирования упомянутой позиционно регулируемой части относительно корпуса (2).
27. Способ по одному из предыдущих пп.23-26, отличающийся тем, что управляют по меньшей мере одним из вышеупомянутых зазоров, когда элемент (1) не функционирует, и/или управляют на основе заданной величины до приведения в действие упомянутого элемента (1).
28. Способ по одному из предыдущих пп.23-27, отличающийся тем, что управляют по меньшей мере одним из вышеупомянутых зазоров, когда элемент (1) функционирует.
29. Способ по одному из предыдущих пп.23-28, отличающийся тем, что позиционное регулирование упомянутой позиционно регулируемой части относительно корпуса (2) осуществляют механически, гидравлически и/или пневматически.
| US 10539137, 11.08.2020 | |||
| Роторная машина | 1981 |
|
SU964239A1 |
| ВИНТОВАЯ МАШИНА | 0 |
|
SU389289A1 |
| CN 102713157 A, 03.10.2012 | |||
| КАЛОРИМЕТРИЧЕСКИЙ СПОСОБ ПРЕЦИЗИОННОГО ИЗМЕРЕНИЯ ТЕПЛОТЫ СГОРАНИЯ ПРИРОДНОГО ГАЗА И ДРУГИХ ВИДОВ ГАЗООБРАЗНОГО ТОПЛИВА | 1999 |
|
RU2169361C1 |

