Область техники, к которой относится изобретение
Варианты осуществления настоящей заявки (раскрытия) в общем относятся к области обработки изображений и, в частности, к внутреннему предсказанию с позиционно-зависимой комбинацией предсказания.
Уровень техники
Кодирование видео (кодирование и декодирование видео) используется в широком диапазоне приложений цифрового видео, например, в широковещательном цифровом телевидении, передаче видео через интернет и мобильные сети, в диалоговых приложениях в реальном времени, таких как видеочат, видеоконференцсвязь, DVD и Blu-Ray диски, системы сбора и редактирования видеоконтента и в приложениях видеокамер безопасности. Объем видеоданных, необходимых для изображения даже относительно короткого видео, может быть существенным, что может затруднить передачу данных в сети связи с ограниченной пропускной способностью. Таким образом, в современных сетях связи до передачи видеоданные обычно сжимаются. Размер видео также имеет значение, поскольку ресурсы памяти могут быть ограничены для хранения видео в устройстве хранения. Устройства сжатия видео часто используют программное обеспечение и/или аппаратное обеспечение на источнике для кодирования видеоданных до передачи или хранения, тем самым, уменьшая объем данных, необходимых для представления цифровых видеоизображений. Затем сжатые данные принимаются в точке назначения устройством распаковки видео, которое декодирует видеоданные. Благодаря ограниченным сетевым ресурсам и постоянно растущим требованиям более высокого качества видео, требуются усовершенствованные технологии сжатия и распаковки, которые повышают коэффициент сжатия практически без ухудшения качества изображения.
Раскрытие сущности изобретения
Ввиду вышеупомянутых технических задач настоящее раскрытие предлагает решение вышеупомянутых технических задач.
Варианты осуществления настоящего раскрытия предлагают устройства и способы внутреннего предсказания блока изображения в соответствии с независимыми пунктами формулы изобретения.
Решения вышеуказанных и других задач настоящего раскрытия изложены в независимых пунктах формулы изобретения. Дополнительные формы реализации очевидны из зависимых пунктов формулы изобретения, описания и чертежей.
Настоящее раскрытие предлагает:
способ внутреннего предсказания блока изображения, содержит, для выборки из множества выборок блока:
определение значения предсказанной выборки из одного или более значений опорной выборки посредством внутреннего предсказания с использованием режима внутреннего предсказания, выбранного из одного из DC режима внутреннего предсказания, планарного режима внутреннего предсказания и углового режима внутреннего предсказания;
определение первого веса на основании режима внутреннего предсказания и одного из высоты блока, ширина блока или обоих;
определение второго веса на основании режима внутреннего предсказания и одного из высоты блока, ширина блока или обоих;
вычисление дополнительного значения в качестве взвешенной суммы значения верхней опорной выборки и значения левой опорной выборки посредством взвешивания значения верхней опорной выборки первым весом и значения левой опорной выборки вторым весом;
умножение значения предсказанной выборки на весовой коэффициент выборки для получения взвешенного значения предсказанной выборки;
добавление дополнительного значения к взвешенному значению предсказанной выборки для получения ненормализованного модифицированного значения предсказанной выборки; и
нормализация ненормализованного модифицированного значения предсказанной выборки посредством арифметического правого сдвига целочисленного представления ненормализованного модифицированного значения предсказанной выборки для получения нормализованного модифицированного значения предсказанной выборки.
В частности, в настоящем документе первый вес и второй вес могут быть разными.
В возможной форме реализации способа в соответствии с предшествующим аспектом как таковым, в котором способ содержит внутреннее предсказание блока изображения, содержащий каждую выборку множества выборок блока.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором
определение первого веса и определения второго веса содержит определение коэффициента масштабирования на основании режима внутреннего предсказания и одного из высоты блока, ширины блока или обоих; в котором первый вес и второй вес определяются на основании коэффициента масштабирования, соответственно.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового; в котором
определение первого веса содержит определение вертикального коэффициента масштабирования, обозначенный nScaleY, на основании высоты блока и режима внутреннего предсказания, в котором первый вес определяется на основании вертикального коэффициента масштабирования, nScaleY;
определение второго веса содержит определение горизонтального коэффициента масштабирования, обозначенный nScaleX, на основании ширины блока и режима внутреннего предсказания, в котором второй вес определяется на основании горизонтального коэффициента масштабирования, nScaleX, нормализацию ненормализованного значения предсказанной выборки арифметическим правым сдвигом целочисленного представления ненормализованного значения предсказанной выборки для получения нормализованного значения предсказанной выборки.
В настоящем изобретении определение первого веса содержит определение вертикального коэффициента масштабирования, тогда как определение второго веса содержит определение горизонтального коэффициента масштабирования, в котором следует понимать, что в зависимости от типа режима внутреннего предсказания, эти коэффициенты могут быть разными.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором nScaleX и nScaleY получены на основании индекса класса режима, соответственно, в котором индекс класса режима получен с использованием группы режимов внутреннего предсказания.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором индекс класса режима отображается на конкретную группу режимов внутреннего предсказания в соответствии с одной из следующих таблиц:
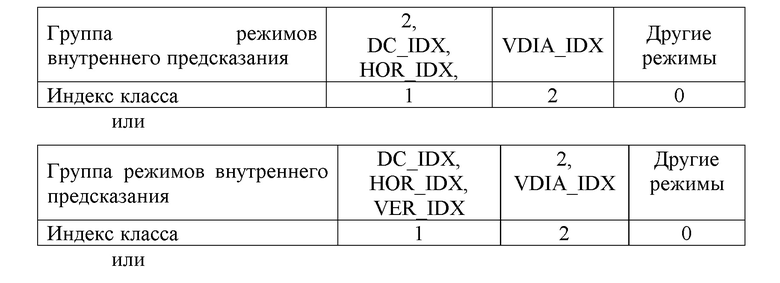
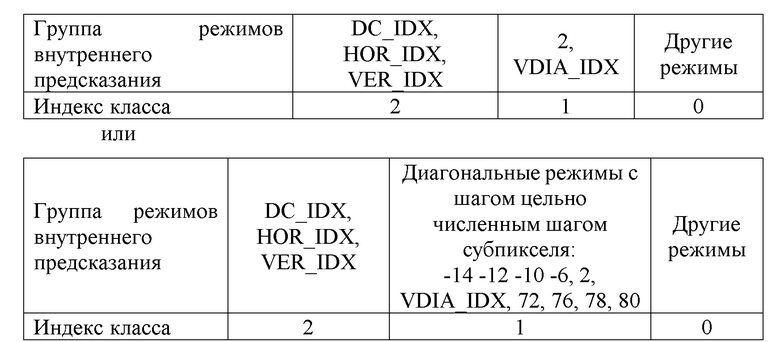
в котором DC_IDX означает DC режим, который имеет индекс режима внутреннего предсказания равный 1, HOR_IDX и VER_IDX означают горизонтальный и вертикальный режимы, которые имеют индексы режима внутреннего предсказания 18 и 50 соответственно, VDIA_IDX обозначает диагональный режим, который имеет индекс режима внутреннего предсказания равный 66.
В настоящем изобретении показаны разные отображения групп режимов внутреннего предсказания на разные классы.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором nScaleX и nScaleY получают в соответствии со следующим отображением:
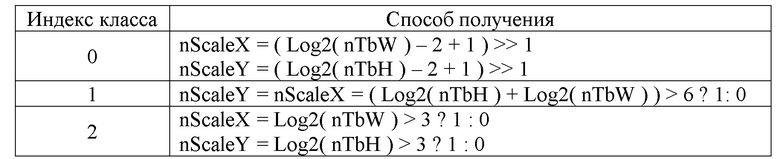
в котором nTbW и nTbH обозначают ширину и высоту предсказанного блока, соответственно, и «>>» обозначает операцию правого сдвига;
в котором Floor является функцией округления до ближайшего целого в меньшую сторону, Log2 нормализует целочисленный логарифм к основанию 2, Min означает наименьший из его аргументов и «>>» обозначает операцию правого сдвига.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором индекс класса режима отображается на конкретную группу режимов внутреннего предсказания в соответствии со следующей таблицей:

В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором nScaleX и nScaleY получают в соответствии со следующим отображением:
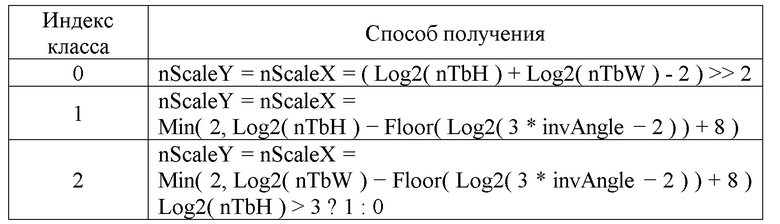
в котором nTbW и nTbH обозначают ширину и высоту предсказанного блока, соответственно, и «>>» обозначает операцию правого сдвига;
в котором Floor является функцией округления до ближайшего целого в меньшую сторону, Log2 нормализует целочисленный логарифм к основанию 2, Min означает наименьший из его аргументов и «>>» обозначает операцию правого сдвига; в котором invAngle является параметром обратного угла, который получен с использованием intraPredAngle следующим образом:
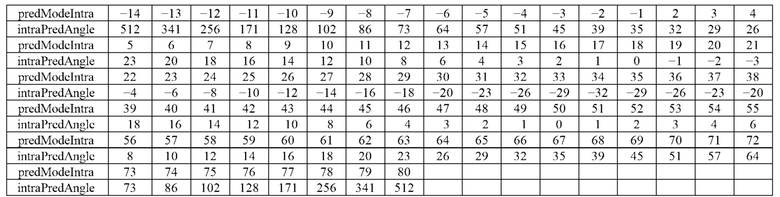
в котором IntraPredAngle является параметром угла, который получен из режима внутреннего предсказания, заданный переменной predModelntra, используя таблицу поиска, LUT.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором LUT задается следующей таблицей
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором нормализация ненормализованного модифицированного значения предсказанной выборки содержит вычисление значения предсказанной выборки как 
в котором
P(x,у) является ненормированным модифицированным предсказанным значением выборки,
 представляют собой значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
представляют собой значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
wL=V>>((х<<1)>>nScaleX) является горизонтальным весовым коэффициентом,
wT=V>>((у<<1)>>nScaleY) является вертикальным весовым коэффициентом,
V является базовым значением;
х является горизонтальной координатой каждой выборки и
у является вертикальной координатой выборки;
в котором cliplCmp устанавливается следующим образом:
в случае, если cIdx равен 0, clip1Cmp устанавливается равным CliplY;
в противном случае clip1Cmp устанавливается равным Clip1C;
в котором cIdx является переменной, указывающей цветовой компонент текущего блока; и
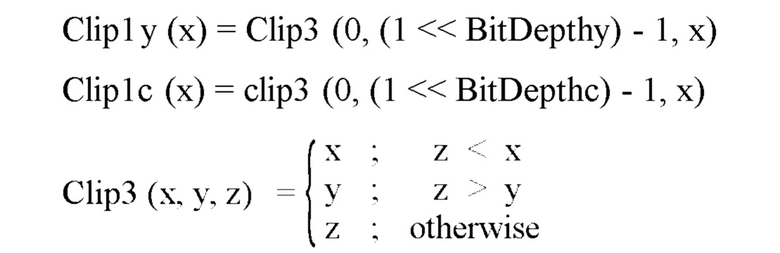
в котором BitDepthy является битовой глубиной выборок яркости.
в котором BitDepthc является битовой глубиной выборок цветности.
В возможной форме реализации способа в соответствии с предшествующим аспектом как таковым, в котором для планарного режима wTL=0, в то время как для горизонтального режима wTL=wT и для вертикального режима wTL=wL.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором нормализация ненормализованного модифицированного значения предсказанной выборки содержит вычисление нормированного модифицированного значения предсказанной выборки как

в котором
 является нормализованным модифицированным предсказанным значением выборки,
является нормализованным модифицированным предсказанным значением выборки,
P(x,у) является ненормированным модифицированным предсказанным значением выборки,
 представляют значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
представляют значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
wL=V>>((х<<1)>>nScaleX) является горизонтальным весовым коэффициентом,
wT=V>>((у<<1)>>nScaleY) является вертикальным весовым коэффициентом,
х является горизонтальной координатой каждой выборки и
у является вертикальной координатой выборки.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором каждая выборка не обновляется
если сумма ширины блока и высоты блока, заданная в выборках, соответственно, превышает 64 выборок, и
либо режим внутреннего предсказания является несимметричным не диагональным, либо режим внутреннего предсказания является планарным режимом внутреннего предсказания.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, в котором intraPredMode является несимметричным недиагональным, если intraPredMode не равно 2 или VDIA_IDX и одно из следующего является истинным: intraPredMode не менее чем VDIA_IDX - numModes или intraPredMode не превышает 2+numModes.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такого, изображение является частью видеопоследовательности.
В возможной форме реализации способа по любой предшествующей реализации предшествующего аспекта или предшествующего аспекта как такового, дополнительно содержащий
добавление остаточного значения к нормализованному модифицированному предсказанному значению выборки для получения значения восстановленной выборки.
Настоящее раскрытие дополнительно предлагает кодер (20), содержащий схему обработки для выполнения способа по любой предшествующей реализации любого предшествующего аспекта или любого предшествующего аспекта как такового.
Настоящее раскрытие дополнительно предлагает декодер (30), содержащий схему обработки для выполнения способа по любой предшествующей реализации любого предшествующего аспекта или любого предшествующего аспекта как такового.
Настоящее раскрытие дополнительно предлагает компьютерную программу, содержащую программный код для выполнения способа по любой предшествующей реализации любого предшествующего аспекта или любого предшествующего аспекта как такового.
Настоящее раскрытие может дополнительно предоставить компьютерный программный продукт, содержащий программный код для выполнения способа по любой предшествующей реализации любого предшествующего аспекта или любого предшествующего аспекта как такового.
Настоящее раскрытие дополнительно предлагает декодер, содержащий:
один или более процессоров; и
постоянный машиночитаемый носитель соединенный с процессорами и хранящий программы для выполнения процессорами, в котором программы, при выполнении процессорами, конфигурируют декодер выполнить способ по любой предшествующей реализации любого предшествующего аспекта или любому предшествующему аспекту как таковому.
Настоящее раскрытие дополнительно предлагает кодер, содержащий: один или более процессоров; и
постоянный машиночитаемый носитель, соединенный с процессорами и хранящий программы для выполнения процессорами, в котором программы, при выполнении процессорами, конфигурируют кодер выполнить способ по любой предшествующей реализации любого предшествующего аспекта или любому предшествующему аспекту как таковому.
Подробное описание одного или более вариантов осуществления изложено в прилагаемых чертежах и описании ниже. Другие признаки, объекты и преимущества будут очевидны из описания, чертежей и формулы изобретения.
Краткое описание чертежей
Далее приведено подробное описание вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
фиг. 1А схематично иллюстрирует пример системы кодирования видео, выполненной с возможностью реализации вариантов осуществления изобретения;
фиг. 1В схематически иллюстрирует другой пример системы кодирования видео, выполненной с возможностью реализации вариантов осуществления изобретения;
фиг. 2 схематично иллюстрирует пример видеокодера, выполненного с возможностью реализации вариантов осуществления изобретения;
фиг. 3 схематично иллюстрирует пример структуры видеодекодера, выполненного с возможностью реализации вариантов осуществления изобретения;
фиг. 4 схематически иллюстрирует пример устройства кодирования или устройства декодирования;
фиг. 5 схематично иллюстрирует другой пример устройства кодирования или устройства декодирования;
фиг. 6 схематически иллюстрирует угловые направления внутреннего предсказания и ассоциированные режимы внутреннего предсказания в HEVC;
фиг. 7 схематически иллюстрирует угловые направления внутреннего предсказания и ассоциированные режимы внутреннего предсказания в JEM;
фиг. 8 схематично иллюстрирует угловые направления внутреннего предсказания и ассоциированные режимы внутреннего предсказания в проекте v.3 спецификации VTM-3.0 и VVC.
фиг. 9 схематично иллюстрирует угловые направления внутреннего предсказания и ассоциированные режимы внутреннего предсказания в проекте v.3 спецификации VTM-3.0 и VVC;
фиг. 10 схематично иллюстрирует пример PDPC весов DC режима для (0, 0) и (1, 0) позиций внутри 4×4 блока;
фиг. 11 схематично иллюстрирует пример внутреннего предсказания блока из опорных выборок основной опорной стороны;
фиг. 12 иллюстрирует пример PDPC весов DC режима для (0, 0) и (1, 0) позиций внутри 4×4 блока;
фиг. 13 схематично иллюстрирует пример способа определения вертикального и горизонтального коэффициента масштабирования;
фиг. 14 схематично иллюстрирует пример способа определения вертикального и горизонтального коэффициента масштабирования;
фиг. 15 схематично иллюстрирует альтернативный пример способа определения вертикального и горизонтального коэффициента масштабирования.
В последующем описании идентичные ссылочные позиции относятся к идентичным или, по меньшей мере, функционально эквивалентным признакам, если явно не указано иное.
Осуществление изобретения
В нижеследующем описании приведена ссылка на сопроводительные чертежи, которые составляют часть настоящего раскрытия и показывают в качестве иллюстрации конкретные аспекты вариантов осуществления изобретения или конкретные аспекты, в которых могут использоваться варианты осуществления настоящего раскрытия. Очевидно, что варианты осуществления изобретения могут использоваться в других аспектах и содержать структурные или логические изменения, не изображенные на чертежах. Поэтому нижеследующее подробное описание не следует воспринимать в ограничивающем смысле, и объем настоящего раскрытия определяется прилагаемой формулой изобретения.
Например, очевидно, что настоящее раскрытие с описанным способом также может быть верным для соответствующего устройства или системы, выполненной с возможностью выполнять способ, и наоборот. Например, если описан один или несколько конкретных этапов способа, соответствующее устройство может включать в себя один или несколько блоков, например, функциональные блоки, чтобы выполнять описанный один или множество этапов способа (например, один блок, выполняющий один или множество этапов, или множество блоков, каждый из которых выполняет один или несколько из множества этапов) даже, если такой один или несколько блоков не описаны и не проиллюстрированы явно на чертежах. С другой стороны, например, если конкретное устройство описано на основании одного или множества блоков, например, функциональных блоков, соответствующий способ может включать в себя один этап для выполнения функциональных возможностей одного или множества блоков (например, один этап, выполняющий функциональные возможности одного или множества блоков, или множество этапов, каждый из которых выполняет функциональные возможности одного или нескольких из множество блоков) даже, если такой один или множество этапов явно не описаны или не проиллюстрированы на чертежах. Кроме того, понятно, что признаки различных примерных вариантов осуществления и/или аспектов, описанных в данном документе, могут быть объединены друг с другом, если специально не указано иное.
Кодирование видео обычно относится к обработке последовательности изображений, которые образуют видео или видеопоследовательность. Вместо термина «изображение» можно использовать термин «кадр» или «изображение» как синонимы в области кодирования видео. Кодирование видео, используемое в настоящем изобретении (или настоящем раскрытии), указывает либо кодирование видео, либо декодирование видео. Кодирование видео выполняется на стороне источника, обычно, содержащее обработку (например, путем сжатия) исходных видеоизображений для уменьшения объема данных, необходимых для представления видеоизображений (для более эффективного хранения и/или передачи). Декодирование видео выполняется на стороне назначения и обычно содержит обратную обработку по сравнению с кодером для восстановления видеоизображений. Варианты осуществления, относящиеся к «кодированию» видеоизображений (или изображений в целом, как будет объяснено позже), следует понимать как относящиеся либо к «кодированию», либо к «декодированию» видеопоследовательности. Комбинация части кодирования и части декодирования также называется CODEC (Coding and Decoding).
В случае кодирования видео без потерь исходные видеоизображения могут быть восстановлены, то есть, восстановленные видеоизображения имеют то же качество, что и исходные видеоизображения (при условии отсутствия потерь передачи или других потерь данных во время хранения или передачи). В случае кодирования видео с потерями выполняется дополнительное сжатие, например, посредством квантования, для уменьшения объема данных, представляющих видеоизображения, которые не могут быть полностью восстановлены в декодере, то есть, качество восстановленных видеоизображений ниже или хуже по сравнению с качеством исходных видеоизображений.
Несколько стандартов кодирования видео принадлежат к группе «гибридных видеокодеков с потерями» (т.е. объединяют пространственное и временное предсказания в области выборки и кодирование с 2D преобразованием для применения квантования в области преобразования). Каждое изображение видеопоследовательности обычно разделяется на набор неперекрывающихся блоков, и кодирование обычно выполняется на уровне блоков. Другими словами, в кодере видео обычно обрабатывается, то есть, кодируется, на уровне блока (видеоблока), например, с использованием пространственного (внутреннее изображение) предсказания и временного (внешнее изображение) предсказания для генерирования блока предсказания, вычитание блока предсказания из текущего блока (блока, который в настоящее время обрабатывается/должен быть обработан) для получения остаточного блока, преобразование остаточного блока и квантование остаточного блока в области преобразования для уменьшения объема данных, которые должны быть переданы (сжаты), тогда как в декодере частично выполняется обратная обработка по сравнению с кодером к кодированному или сжатому блоку для восстановления текущего блока для представления. Кроме того, кодер дублирует цикл обработки декодера, так что оба будут генерировать идентичные предсказания (например, внутреннее и внешнее предсказание) и/или повторно восстанавливать для обработки, то есть, кодировать, последующие блоки.
В следующих вариантах осуществления со ссылкой на фиг. 1-3 приведено описание кодера 20, декодера 30 и системы 10 кодирования.
Фиг. 1А представляет собой блок-схему, иллюстрирующую пример системы 10 кодирования, например, системы 10 кодирования видео (или сокращенно, система 10 кодирования), которая может использовать способы этого настоящего раскрытия. Видеокодер 20 (например, кодер 20) и видеодекодер 30 (например, декодер 30) системы 10 кодирования видео представляют собой примеры устройств, которые могут быть выполнены с возможностью выполнять способы в соответствии с различными примерами, описанными в настоящем изобретении.
Как показано на фиг. 1А, система 10 кодирования содержит устройство 12 источника, выполненное с возможностью предоставлять данные 13 закодированного изображения, например, в устройство 14 назначения для декодирования данных 13 закодированного изображения.
Устройство 12 источника содержит кодер 20 и может дополнительно, т.е. возможно, содержать источник 16 изображения, препроцессор 18 (блок предварительной обработки), например, препроцессор 18 изображения и интерфейс связи или блок 22 связи.
Источник 16 изображения может содержать или быть устройством захвата изображения любого типа, например, для захвата реального изображения и/или любого вида изображения или комментария (для кодирования содержимого экрана некоторые тексты на экране также считаются часть изображения или изображения, которое должно быть закодировано), устройство генерирования, например процессор компьютерной графики для генерирования компьютерного анимированного изображения, или любое устройство для получения и/или предоставления реального изображения, компьютерного анимированного изображения (например, контент экрана, изображение виртуальной реальности (VR)) и/или любую их комбинацию (например, изображение дополненной реальности (AR)). Источником изображения может быть любой тип памяти или хранилища, в котором хранятся любые из вышеупомянутых изображений.
В отличие от препроцессора 18 и обработки, выполняемой блоком 18 предварительной обработки, изображение или данные 17 изображения также могут называться необработанным изображением или данными 17 исходного изображения.
Препроцессор 18 выполнен с возможностью принимать (необработанные) данные 17 изображения и выполнять предварительную обработку данных 17 изображения для получения предварительно обработанного изображения 19 или предварительно обработанных данных 19 изображения. Предварительная обработка выполняется препроцессором 18, которая, например, содержит обрезку, преобразование цветового формата (например, из RGB в YCbCr), цветокоррекцию или устранение шумов. Можно понять, что препроцессор 18 может быть возможным компонентом.
Видеокодер 20 выполнен с возможностью принимать предварительно обработанные данные 19 изображения и предоставлять данные 21 закодированного изображения (дополнительные подробности будут описаны ниже, например, со ссылкой на фиг. 2).
Интерфейс 22 связи устройства 12 источника может быть выполнен с возможностью принимать данные 21 закодированного изображения и передавать данные 21 закодированного изображения (или любой их дополнительной обработанной версии) по каналу 13 связи в другое устройство, например, устройство 14 назначения или любое другое устройство для хранения или прямого восстановления.
Устройство 14 назначения содержит декодер 30 (например, видеодекодер 30) и может дополнительно, т.е. возможно, содержать интерфейс связи или блок 28 связи, постпроцессор 32 (блок 32 постобработки) и устройство 34 отображения.
Интерфейс 28 связи устройства 14 назначения выполнен с возможностью принимать данные 21 закодированного изображения (или любой их дополнительно обработанной версии), например, непосредственно из устройства 12 источника или из любого другого источника, например, запоминающее устройство, например, устройство хранения данных закодированного изображения, и предоставить данные 21 закодированного изображения в декодер 30.
Интерфейс 22 связи и интерфейс 28 связи могут быть выполнены с возможностью передавать или принимать данные 21 кодированного изображения или закодированные данные 13 через прямую линию связи между устройством 12 источника и устройством 14 назначения, например, прямое проводное или беспроводное соединение или через любую сеть, например, проводная или беспроводная сеть или любая их комбинация, или любая частная и общественная сеть, или любая их комбинация.
Интерфейс 22 связи может быть, например, выполнен с возможностью упаковывать данные 21 закодированного изображения в соответствующий формат, например, пакеты и/или обрабатывать данные закодированного изображения с использованием любого вида кодирования передачи или обработки для передачи по каналу связи или сети связи.
Интерфейс 28 связи, образующий аналог интерфейса 22 связи, может быть, например, выполнен с возможностью принимать переданные данные и обрабатывать передаваемые данные с использованием любого вида соответствующего декодирования передачи или обработки и/или распаковки для получения данных 21 закодированного изображения.
Как интерфейс 22 связи, так и интерфейс 28 связи могут быть сконфигурированы как однонаправленные интерфейсы связи, как показано стрелкой для данных 13 закодированного изображения на фиг. 1А, указывающей от устройства 12 источника к устройству 14 назначения или, как интерфейсы двунаправленной связи, и может быть выполнен с возможностью, например, отправлять и получать сообщения, например, для установки соединения, подтверждения и обмена любой другой информацией, относящейся к каналу связи и/или передаче данных, например, передача данных закодированного изображения.
Декодер 30 выполнен с возможностью принимать данные 21 кодированного изображения и предоставлять данные 31 декодированного изображения или декодированного изображения 31 (дополнительные подробности будут описаны ниже, например, на основании фиг. 3 или фиг. 5).
Постпроцессор 32 устройства 14 назначения выполнен с возможностью постобработки данных 31 декодированного изображения (также называемых данными восстановленного изображения), например, декодированное изображение 31, для получения данных 33 изображения после обработки, например, пост-обработанное изображение 33. Постобработка, выполняемая блоком 32 постобработки, может содержать, например, преобразование цветового формата (например, из YCbCr в RGB), цветокоррекция, обрезка или повторная выборка, или любая другая обработка, например, для подготовки данных 31 декодированного изображения для отображения, например, с помощью устройства 34 отображения.
Устройство 34 отображения устройства 14 назначения выполнено с возможностью принимать данные 33 изображения после обработки для отображения изображения, например, пользователю или зрителю. Устройство 34 отображения может быть или содержать любой вид дисплея для представления восстановленного изображения, например, встроенный или внешний дисплей или монитор. Дисплеи могут, например, состоят из жидкокристаллических дисплеев (LCD), дисплеев на органических светодиодах (OLED), плазменных дисплеев, проекторов, микро-светодиодных дисплеев, жидких кристаллов на кремнии (LCoS), цифрового светового процессора (DLP) или любого другого дисплея.
Хотя фиг. 1А изображает устройство 12 источника и устройство 14 назначения как отдельные устройства, варианты осуществления устройств также могут содержать оба или обе функциональные возможности устройство 12 источника или соответствующие функциональные возможности и устройство 14 назначения или соответствующие функциональные возможности. В таких вариантах осуществления устройство 12 источника или соответствующие функциональные возможности и устройство 14 назначения или соответствующие функциональные возможности могут быть реализованы с использованием одного и того же аппаратного и/или программного обеспечения или с помощью отдельного аппаратного и/или программного обеспечения или любой их комбинации.
Как будет очевидно для специалиста на основании описания, наличие и (точное) разделение функциональных возможностей различных блоков или функций в устройстве 12 источника и/или устройстве 14 назначения, как показано на фиг. 1А, может варьироваться в зависимости от фактического устройства и реализации.
Кодер 20 (например, видеокодер 20) и декодер 30 (например, видеодекодер 30), каждый может быть реализован как любая из множества подходящих схем, таких как один или несколько микропроцессоров, процессоров цифровых сигналов (DSP), прикладных программ, специальные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA), дискретная логика, оборудование или любые их комбинации. Кодер 20 может быть реализован посредством схемы 46 обработки для реализации различных модулей, как обсуждалось в отношении кодера 20 на фиг. 2 и/или любой другой кодирующей системе или подсистеме, описанной в данном документе. Декодер 30 может быть реализован через посредством схемы 46 обработки для воплощения различных модулей, как обсуждалось в отношении декодера 30 на фиг. 3 и/или любую другую систему или подсистему декодера, описанную в данном документе. Схема обработки может быть выполнена с возможностью выполнять различные операции, как описано ниже. Как показано на фиг. 5, если способы частично реализованы в программном обеспечении, устройство может хранить инструкции для программного обеспечения на подходящем постоянном машиночитаемом носителе данных и может выполнять инструкции в аппаратных средствах, используя один или несколько процессоров для выполнения способов этого настоящего раскрытия. Любой из видеокодера 20 и видеодекодера 30 может быть интегрирован как часть комбинированного кодера/декодера (CODEC) в одном устройстве, например, как показано на фиг. 1В.
Устройство 12 источника и устройство 14 назначения могут содержать любое из широкого диапазона устройств, включающие в себя любые виды портативных или стационарных устройств, например, ноутбуки или портативные компьютеры, мобильные телефоны, смартфоны, планшеты или планшетные компьютеры, камеры, настольные компьютеры, телевизионные приставки, телевизоры, устройства отображения, цифровые медиаплееры, игровые приставки, устройства потокового видео (например, серверы служб контента или контент серверы доставки), широковещательное приемное устройство, широковещательное передающее устройство и т.п. и могут использовать или не использовать любой тип операционной системы. В некоторых случаях устройство 12 источника и устройство 14 назначения могут быть оборудованы для осуществления беспроводной связи. Таким образом, устройство 12 источника и устройство 14 назначения могут быть устройствами беспроводной связи.
В некоторых случаях система 10 кодирования видео, проиллюстрированная на фиг. 1А, является просто примером, и способы настоящего раскрытия могут применяться к настройкам кодирования видео (например, кодирование видео или декодирование видео), которые не обязательно включают в себя какой-либо обмен данными между устройствами кодирования и декодирования. В других примерах данные извлекаются из локальной памяти, передаются по сети и т.п. Устройство для кодирования видео может кодировать и сохранять данные в памяти, и/или устройство для декодирования видео может извлекать и декодировать данные из памяти. В некоторых примерах кодирование и декодирование выполняются устройствами, которые не обмениваются данными друг с другом, а просто кодируют данные в памяти и/или извлекают и декодируют данные из памяти.
Для удобства описания в настоящем документе описаны варианты осуществления изобретения, например, со ссылкой на высокоэффективное кодирование видео (HEVC) или на эталонное программное обеспечение универсального кодирования видео (VVC), стандарта кодирования видео следующего поколения, разработанного группой сотрудничества по кодированию видео (JCT-VC) группы экспертов ITU-T по кодированию видео (VCEG) и ISO/IEC группой экспертов по движущимся изображениям (MPEG). Для специалиста в данной области техники очевидно, что варианты осуществления изобретения не ограничиваются HEVC или VVC.
Кодер и способ кодирования
Фиг. 2 показывает блок-схему примерного видеокодера 20, который выполнен с возможностью реализации способов настоящего раскрытия. В примере на фиг. 2, видеокодер 20 содержит вход 201 (или входной интерфейс 201), блок 204 вычисления остатка, блок 206 обработки преобразования, блок 208 квантования, блок 210 обратного квантования и блок 212 обработки обратного преобразования, блок 214 восстановления, блок 220 контурного фильтра, буфер 230 декодированных изображений (DPB), блок 260 выбора режима, блок 270 энтропийного кодирования и блок 272 выхода (или выходной интерфейс 272). Блок 260 выбора режима может включать в себя блок 244 внешнего предсказания, блок 254 внутреннего предсказания и блок 262 разделения. Блок 244 внешнего предсказания может включать в себя блок оценки движения и блок компенсации движения (не показаны). Видеокодер 20, показанный на фиг. 2, также может называться гибридным видеокодером или видеокодером согласно гибридному видеокодеку.
Блок 204 вычисления остатка, блок 206 обработки преобразования, блок 208 квантования, блок 260 выбора режима образуют прямой путь сигнала кодера 20, тогда как, например, блок 210 обратного квантования, блок 212 обработки обратного преобразования, блок 214 восстановления, буфер 216, контурный фильтр 220, буфер 230 декодированных изображений (DPB), блок 244 внешнего предсказания и блок 254 внутреннего предсказания образуют обратный путь сигнала кодера, в котором обратный путь сигнала кодера соответствует пути сигнала декодера (см. декодер 30 на фиг. 3). Блок 210 обратного квантования, блок 212 обработки обратного преобразования, блок 214 восстановления, контурный фильтр 220, буфер 230 декодированных изображений (DPB), блок 244 внешнего предсказания и блок 254 внутреннего предсказания также относятся к формированию «встроенного декодера» видеокодера 20.
Изображения и разделение изображения (изображения и блоки)
Кодер 20 выполнен с возможностью принимать, например, через вход 201 изображение 17 (или данные 17 изображения), например, изображение последовательности изображений, образующих видео или видеопоследовательность. Принятое изображение или данные изображения также могут быть предварительно обработанным изображением 19 (или предварительно обработанными данными 19 изображения). Для простоты описания далее в настоящем документе упоминаться как изображение 17. Изображение 17 также упоминается, как текущее изображение или изображение, подлежащее кодированию (в частности, при кодировании видео для различия текущего изображения от других изображений, например, ранее закодированных и/или декодированных изображений одной и той же видеопоследовательности, то есть, видеопоследовательности, которая также содержит текущее изображение).
(Цифровое) изображение представляет собой или может рассматриваться как двумерный массив или матрица выборок со значениями интенсивности. Выборка в массиве также может называться пикселем (сокращенная форма элемента изображения) или пикселем. Количество выборок в горизонтальном и вертикальном направлении (или по оси) массива или изображения определяет размер и/или разрешение изображения. Для представления цвета обычно используются три цветовых компонента, то есть, изображение может быть представлено или содержать три массива выборок. В формате RBG или цветовом пространстве изображение содержит соответствующий массив выборок красного, зеленого и синего цветов. Однако при кодировании видео каждый пиксель обычно представлен в формате яркости и цветности или цветовом пространстве, например YCbCr, который содержит компонент яркости, обозначенный Y (иногда вместо него также используется L), и два компонента цветности, обозначенные Cb и Cr. Компонент Y яркости (или кратко, яркость) представляет яркость или интенсивность уровня серого (например, как в полутоновом изображении), в то время как два компонента цветности (или кратко, цветность) Сb и Сг представляют компоненты цветности или информации о цвете. Соответственно, изображение в формате YCbCr содержит массив выборок яркости значений выборок яркости (Y) и два массива выборок цветности значений цветности (Cb и Cr). Изображения в формате RGB могут быть преобразованы в формат YCbCr и наоборот, этот процесс также известен как преобразование цвета. Если изображение является монохромным, оно может содержать только массив выборок яркости. Соответственно, изображение может быть, например, массивом выборок яркости в монохромном формате или массивом выборок яркости и двумя соответствующими массивами выборок цветности в 4:2:0, 4:2:2 и 4:4:4 цветовой формат.
Варианты осуществления кодера 20 могут содержать блок разделения (не показан на фиг. 2), выполненный с возможностью разделять изображение 17 на множество (обычно не перекрывающихся) блоков 203 изображения. Эти блоки также могут называться корневыми блоками, макроблоками (H.264/AVC) или блоками дерева кодирования (СТВ) или блоками дерева кодирования (CTU) (H.265/HEVC и VVC). Блок разделения может быть выполнен с возможностью использовать один и тот же размер блока для всех изображений видеопоследовательности и соответствующей сетки, определяющей размер блока, или изменять размер блока между изображениями, подмножествами или группами изображений и разделять каждое изображение на соответствующие блоки.
В дополнительных вариантах осуществления видеокодер может быть выполнен с возможностью принимать непосредственно блок 203 изображения 17, например, один, несколько или все блоки, образующие изображение 17. Блок 203 изображения также может упоминаться как текущий блок изображения или блок изображения, который должен быть кодирован.
Подобно изображению 201, блок 203 снова является или может рассматриваться как двумерный массив или матрица выборок со значениями интенсивности (значениями выборок), хотя и меньшего размера, чем изображение 17. Другими словами, блок 203 может содержать, например, один массив выборок (например, массив яркости в случае монохромного изображения 17 или массив яркости или цветности в случае цветного изображения) или три массива выборок (например, массив яркости и два массива цветности в случае цветного изображения 17) или любое другое количество и/или видов массивов в зависимости от применяемого цветового формата. Количество выборок в горизонтальном и вертикальном направлении (или оси) блока 203 определяет размер блока 203. Соответственно, блок может, например, представлять собой массив выборок MxN (М - столбец на N - строку) или MxN массив коэффициентов преобразования.
Варианты осуществления видеокодера 20, как показано на фиг. 2, могут быть дополнительно выполнены с возможностью кодировать изображение 17 блок за блоком, например, разделять и кодировать блок 203.
Вычисление остатка
Блок 204 вычисления остатка выполнен с возможностью вычислять остаточный блок 205 (также обозначен как остаток 205) на основании блока 203 изображения и блока 265 предсказания (дополнительные подробности о блоке 265 предсказания предоставлены позже), например, путем вычитания значений выборок блока 265 предсказания из значений выборок блока 203 изображения, выборка за выборкой (пиксель за пикселем) для получения остаточного блока 205 в области выборки.
Преобразование
Блок 206 обработки преобразования выполнен с возможностью применять преобразования, например, дискретное косинусное преобразование (DCT) или дискретное синусоидальное преобразование (DST) на значениях выборки остаточного блока 205 для получения коэффициентов 207 преобразования в области преобразования. Коэффициенты 207 преобразования также могут называться остаточными коэффициентами преобразования и представлять остаточный блок 205 в области преобразования.
Блок 206 обработки преобразования может быть выполнен с возможностью применять целочисленные аппроксимации DCT/DST, такие как преобразования, указанные для HEVC/H.265. По сравнению с ортогональным преобразованием DCT, такие целочисленные приближения обычно масштабируются с определенным коэффициентом. Для сохранения нормы остаточного блока, который обрабатывается прямым и обратным преобразованиями, в процессе преобразования применяются дополнительные коэффициенты масштабирования. Коэффициенты масштабирования обычно выбираются на основании определенных ограничений, таких как коэффициенты масштабирования, являющиеся степенью два для операции сдвига, разрядности коэффициентов преобразования, компромисса между точностью и затратами на реализацию и т.д. Конкретные коэффициенты масштабирования, например, указываются для обратного преобразования, например, блоком 212 обработки обратного преобразования (и соответствующим обратным преобразованием, например, блоком 312 обработки обратного преобразования в декодере 30) и соответствующие коэффициенты масштабирования для прямого преобразования, например, блоком 206 обработки преобразования в кодере 20, соответственно.
Варианты осуществления видеокодера 20 (соответственно блока 206 обработки преобразования) могут быть выполнены с возможностью выводить параметры преобразования, например, тип преобразования или преобразования, например, непосредственно или закодированные или сжатые блоком 270 энтропийного кодирования, так что, например, видеодекодер 30 может принимать и использовать параметры преобразования для декодирования.
Квантование
Блок 208 квантования выполнен с возможностью квантовать коэффициенты 207 преобразования для получения квантованных коэффициентов 209 преобразования, например, путем применения скалярного квантования или векторного квантования. Квантованные коэффициенты 209 преобразования также могут упоминаться как квантованные остаточные коэффициенты 209.
Процесс квантования может уменьшить битовую глубину, ассоциированную с некоторыми или всеми коэффициентами 207 преобразования. Например, n-битовый коэффициент преобразования может быть округлен с понижением до m-битного коэффициента преобразования во время квантования, где n больше m. Степень квантования может быть изменена путем регулировки параметра квантования (QP). Например, для скалярного квантования может применяться другое масштабирование для достижения более тонкого или более грубого квантования. Меньшие размеры этапов квантования соответствуют более тонкому квантованию, тогда как большие размеры шагов квантования соответствуют более грубому квантованию. Применимый размер шага квантования может быть указан параметром квантования (QP). Параметр квантования может, например, быть индексом для заранее определенного набора применимых размеров шага квантования. Например, малые параметры квантования могут соответствовать точному квантованию (малые размеры шага квантования), и большие параметры квантования могут соответствовать грубому квантованию (большие размеры шага квантования) или наоборот. Квантование может включать в себя деление по размеру шага квантования и соответствующее или обратное деквантование, например, блоком 210 обратного квантования, может включать в себя умножение на размер шага квантования. Варианты осуществления согласно некоторым стандартам, например, HEVC, могут быть выполнены с возможностью использовать параметр квантования для определения размера шага квантования. Обычно размер шага квантования может быть вычислен на основании параметра квантования с использованием аппроксимации с фиксированной точкой уравнения, включающей в себя деление. Дополнительные коэффициенты масштабирования могут быть введены для квантования и деквантования для восстановления нормы остаточного блока, который может быть изменен из-за масштабирования, используемого при аппроксимации с фиксированной точкой уравнения для размера шага квантования и параметра квантования. В одной примерной реализации масштабирование обратного преобразования и деквантования могут быть объединены. В качестве альтернативы могут использоваться настроенные таблицы квантования и сигнализироваться из кодера к декодеру, например, в битовом потоке. Квантование является операцией с потерями, при которой потери возрастают с увеличением размеров шага квантования.
Варианты осуществления видеокодера 20 (соответственно, блок 208 квантования) могут быть выполнены с возможностью выводить параметры квантования (QP), например, непосредственно или закодированы блоком 270 энтропийного кодирования, так что, например, видеодекодер 30 может принимать и применять параметры квантования для декодирования.
Обратное квантование
Блок 210 обратного квантования выполнен с возможностью применять обратное квантование блока 208 квантования к квантованным коэффициентам для получения деквантованных коэффициентов 211, например, путем применения схемы обратного квантования, применяемой блоком 208 квантования, на основании или с использованием того же размера шага квантования, что и блок 208 квантования. Деквантованные коэффициенты 211 также могут называться деквантованными остаточными коэффициентами 211 и соответствовать, хотя обычно не идентичны коэффициентам преобразования из-за потерь при квантовании, коэффициентам 207 преобразования.
Обратное преобразование
Блок 212 обработки обратного преобразования выполнен с возможностью применять обратное преобразование, применяемое блоком 206 обработки преобразования, например, обратное дискретное косинусное преобразование (DCT) или обратное дискретное синусоидальное преобразование (DST) для получения восстановленного остаточного блока 213 (или соответствующих деквантованных коэффициентов 213) в области выборки. Восстановленный остаточный блок 213 также может называться блоком 213 преобразования.
Восстановление
Блок 214 восстановления (например, блок суммирования или сумматор 214) выполнен с возможностью добавлять блок 213 преобразования (то есть, восстановленный остаточный блок 213) к блоку 265 предсказания для получения восстановленного блока 215 в области выборки, например, путем сложения, выборка к выборке, значений выборок восстановленного остаточного блока 213 и значений выборок блока 265 предсказания.
Фильтрация
Блок 220 контурного фильтра (или коротко, «контурный фильтр» 220) выполнен с возможностью фильтрации восстановленного блока 215 для получения отфильтрованного блока 221 или, как правило, для фильтрации восстановленных выборок для получения отфильтрованных выборок. Блок контурного фильтра предназначен, например, для сглаживания пиксельных переходов или для иного способа повышения качества видео. Блок 220 контурного фильтра может содержать один или более контурных фильтров, таких как фильтр деблокинга, фильтр с адаптивным сдвигом (SAO) или другие фильтры, например, двусторонний фильтр или адаптивный контурный фильтр (ALF), или фильтры повышения резкости или сглаживания, или коллаборативные фильтры или любую их комбинацию. Хотя блок 220 контурного фильтра показан на фиг. 2 как контурный фильтр, в других конфигурациях блок 220 контурного фильтра может быть реализован как постконтурный фильтр. Отфильтрованный блок 221 также может упоминаться как фильтрованный восстановленный блок 221.
Варианты осуществления видеокодера 20 (соответственно блока 220 контурного фильтра) могут быть выполнены с возможностью выводить параметры контурного фильтра (такие как информация адаптивного смещения выборки), например, непосредственно или закодированные блоком 270 энтропийного кодирования, так что, например, декодер 30 может принимать и применять те же параметры контурного фильтра или соответствующие контурные фильтры для декодирования.
Варианты осуществления видеокодера 20 (соответственно блока 220 контурного фильтра) могут быть выполнены с возможностью выводить параметры контурного фильтра (такие как информация адаптивного смещения выборки), например, кодируется непосредственно или блоком 270 энтропийного кодирования или любым другим блоком энтропийного кодирования, так что, например, декодер 30 может принимать и применять одни и те же параметры контурного фильтра для декодирования.
Буфер декодированных изображений
Буфер 230 декодированных изображений (DPB) может быть памятью опорных изображений, в которой хранятся данные опорных изображений для использования при кодировании видеоданных видеокодером 20. DPB 230 может быть сформирован любым из множества запоминающих устройств, таких как динамическая память произвольного доступа (DRAM), включающая в себя синхронную DRAM (SDRAM), магниторезистивную RAM (MRAM), резистивную RAM (RRAM) или другие типы запоминающих устройств. Буфер 230 декодированных изображений (DPB) выполнен с возможностью хранить фильтрованный блок 221. Буфер 230 декодированных изображений может быть дополнительно выполнен с возможностью хранить другие ранее отфильтрованные блоки, например, ранее восстановленные и отфильтрованные блоки 221 одного и того же текущего изображения или разных изображений, например, ранее восстановленные изображения, и могут предоставлять полные ранее реконструированные, то есть, декодированные, изображения (и соответствующие опорные блоки и выборки) и/или частично восстановленное текущее изображение (и соответствующие опорные блоки и выборки), например, для внешнего предсказания. Буфер 230 декодированного изображения (DPB) также выполнен с возможностью хранить один или несколько нефильтрованных восстановленных блоков 215 или, в общем, нефильтрованные восстановленные выборки, например, если восстановленный блок 215 не фильтруется блоком 220 контурного фильтра или любой другой дополнительно обработанной версией восстановленных блоков или выборок.
Выбор режима (разделение и предсказание)
Блок 260 выбора режима содержит блок 262 разделения, блок 244 внешнего предсказания и блок 254 внутреннего предсказания и выполнен с возможностью принимать или получать исходные данные изображения, например, исходный блок 203 (текущий блок 203 текущего изображения 17) и восстановленные данные изображения, например, фильтрованные и/или нефильтрованные восстановленные выборки или блоки одного и того же (текущего) изображения и/или из одного или множества ранее декодированных изображений, например, из буфера 230 декодированного изображения или других буферов (например, линейный буфер, не показан). Данные восстановленное изображение используется в качестве данных опорного изображения для предсказания, например, внешнее предсказание или внутреннее предсказание, для получения блока 265 предсказания или предиктора 265.
Блок 260 выбора режима может быть выполнен с возможностью определять или выбирать разделение для режима предсказания текущего блока (включающее в себя отсутствие разделения) и режима предсказания (например, режим внутреннего или внешнего предсказания) и генерировать соответствующий блок 265 предсказания, который используется для вычисления остаточного блока 205 и для восстановления восстановленного блока 215.
Варианты осуществления блока 260 выбора режима могут быть выполнены с возможностью выбирать разделение и режим предсказания (например, из тех, которые поддерживаются или доступны для блока 260 выбора режима), которые обеспечивают наилучшее совпадение или, другими словами, минимальный остаток (минимальный остаток означает лучшее сжатие для передачи или хранения), или минимальные накладные расходы на сигнализацию (минимальные накладные расходы на сигнализацию означают лучшее сжатие для передачи или хранения), или который учитывает или уравновешивает оба. Блок 260 выбора режима может быть выполнен с возможностью определять режим разделения и предсказания на основании оптимизации искажения скорости (RDO), то есть, выбирать режим предсказания, который обеспечивает минимальное искажение скорости. Такие термины, как «лучший», «минимум», «оптимальный» и т.д. в этом контексте не обязательно относятся к общему «лучшему», «минимуму», «оптимальному» и т.д., но также могут относиться к выполнению прекращения или критерий выбора, такой как значение, превышающее или падающее ниже порогового значения, или другие ограничения, потенциально ведущие к «неоптимальному выбору», но уменьшающие сложность и время обработки.
Другими словами, блок 262 разделения может быть выполнен с возможностью разделять блок 203 на уменьшенные блоки или субблоки (которые вновь образуют блоки), например, итеративно с использованием разделения дерева квадрантов (QT), двоичного разделения (ВТ) или троичного дерева (ТТ) или любой их комбинации и для выполнения, например, предсказания для каждого из разделов блоков или субблоков, в котором выбор режима содержит выбор древовидной структуры разделенного блока 203 и режимы предсказания применяются к каждому из разделов или субблокам.
Далее более подробно поясняется процесс разделения (например, блоком 260 разделения) и обработка предсказания (блоком 244 внешнего предсказания и блоком 254 внутреннего предсказания), выполняемые примерным видеокодером 20.
Разделение
Блок 262 разделения может разделять (или разбивать) текущий блок 203 на меньшие разделы, например, блоки меньшего размера квадратной или прямоугольной формы. Эти меньшие блоки (которые также могут называться субблоками) могут быть дополнительно разделены на еще меньшие разделы. Это также называется разделением дерева или иерархическим разделением дерева, в котором корневой блок, например, на корневом уровне 0 дерева (уровень 0 иерархии, глубина 0) может быть рекурсивно разделен, например, разделен на два или более блока следующего более нижнего уровня дерева, например, узлы на уровне 1 дерева (уровень 1 иерархии, глубина 1), в котором эти блоки могут быть снова разделены на два или более блоков следующего более нижнего уровня, например, уровень 2 дерева (уровень 2 иерархии, глубина 2) и т.д., пока не будет завершено разделение, например, при выполнении критерия прекращения, например, достигается максимальная глубина дерева или минимальный размер блока. Блоки, которые не разделяются далее, также называются листовыми блоками или листовыми узлами дерева. Дерево, использующее разделение на два раздела, называется двоичным деревом (ВТ), дерево, использующее разделение на три раздела, называется тройным деревом (ТТ) и дерево, использующее разделение на четыре раздела, называется деревом квадрантов (QT).
Как упоминало ранее, термин «блок», используемый в настоящем документе, может быть частью, конкретно, частью квадратной или прямоугольной формы изображения. Со ссылкой, например, на HEVC и VVC, блок может быть или соответствовать блоку дерева кодирования (CTU), блоку кодирования (CU), блоку предсказания (PU) и блоку преобразования (TU) и/или соответствовать блокам, например, блоку дерева кодирования (СТВ), блоку кодирования (СВ), блоку преобразования (ТВ) или блоку предсказания (РВ).
Например, блок дерева кодирования (CTU) может быть или содержать СТВ выборок яркости, два соответствующих CTBs выборок цветности изображения, которое имеет три массива выборок, или СТВ выборок монохромного изображения или изображения, которое кодируется с использованием трех отдельных цветовых плоскостей и синтаксических структур, используемых для кодирования выборок. Соответственно, блок дерева кодирования (СТВ) может быть блоком NxN выборок для некоторого значения N, так что разделение компонента на CTBs является разделением. Блок кодирования (CU) может быть или содержать блок кодирования выборок яркости, два соответствующих блока кодирования выборок цветности изображения, которое имеет три массива выборок, или блок кодирования выборок монохромного изображения или изображения, которое кодируется с использованием трех отдельных цветовых плоскостей и синтаксических структур, используемые для кодирования выборок. Соответственно, блок кодирования (СВ) может быть блоком MxN выборок для некоторых значений М и N, так что разделение СТВ на блоки кодирования является разделением.
В вариантах осуществления, например, в соответствии с HEVC, блок дерева кодирования (CTU) может быть разделен на CUs с использованием структуры дерева квадратов, обозначенной как дерево кодирования. Решение о том, кодировать ли область изображения с использованием внешнего (временного) или внутреннего (пространственного) предсказания, принимается на CU уровне. Каждый CU может быть дополнительно разделен на один, два или четыре PUs в соответствии с типом разделения PU. Внутри одного PU применяется тот же процесс предсказания, и соответствующая информация передается в декодер на основании PU. После получения остаточного блока путем применения процесса предсказания на основании типа разделения PU, CU может быть разделен на блоки преобразования (TUs) в соответствии с другой структурой дерева квадрантов, аналогичной дереву кодирования для CU.
В вариантах осуществления, например, в соответствии с последним разрабатываемым в настоящее время стандартом кодирования видео, который называется универсальным кодированием видео (VVC), разделение дерева квадратов и двоичного дерева (QTBT) с использованием разделения блока кодирования. В QTBT структуре блока, CU может иметь либо квадратную, либо прямоугольную форму. Например, блок дерева кодирования (CTU) сначала разделяется структурой деревом квадрантов. Листовые узлы дерева квадрантов могут быть дополнительно разделены с помощью древовидной структуры двоичного дерева или троичного (или тройного) дерева. Листовые узлы дерева квадрантов называются блоками кодирования (CUs) и сегментация используются для предсказания и преобразования без любого дополнительного разделения. Это означает, что в большинстве случаев CU, PU и TU имеют одинаковый размер блока в QTBT структуре блока кодирования. Параллельно, также было предложено множество разделений, например, разделение троичного дерева было использовано совместно с QTBT структуре блока.
В одном примере блок 260 выбора режима видеокодера 20 может быть выполнен с возможностью выполнять любую комбинацию способов разделения, описанных в данном документе.
Как описано выше, кодер 20 выполнен с возможностью определять или выбирать наилучший или оптимальный режим предсказания из набора (предопределенных) режимов предсказания. Набор режимов предсказания может содержать, например, режимы внутреннего предсказания и/или режимы внешнего предсказания.
Внутреннее предсказание
Набор режимов внутреннего предсказания может содержать 35 различных режимов внутреннего предсказания, например, ненаправленные режимы, такие как DC режим (или средний) и планарный режим, или направленные режимы, например, как определено в HEVC, или может содержать 67 различных режимов внутреннего предсказания, например, ненаправленные режимы, такие как DC режим (или средний) и планарный режим, или направленные режимы, например, как определено для VVC.
VTM (многоцелевая испытательная модель) версия 3.0 использует 93 режимов внутреннего предсказания и несколько внутренних инструментов сглаживания, включающие в себя четырех отводную внутреннюю интерполяционную фильтрацию субпикселя и позиционно-зависимую комбинацию внутреннего предсказания (PDPC). PDPC предложена в качестве унифицированного механизма модификации предсказанных выборок, полученных в результате внутреннего предсказания с использованием DC, PLANAR или угловых режимов внутреннего предсказания.
Блок 254 внутреннего предсказания выполнен с возможностью использовать восстановленные выборки соседних блоков одного и того же текущего изображения для генерирования блока 265 внутреннего предсказания согласно режиму внутреннего предсказания набора режимов внутреннего предсказания.
Блок 254 внутреннего предсказания (или, в общем, блок 260 выбора режима) дополнительно выполнен с возможностью выводить параметры внутреннего предсказания (или, в общем, информацию, указывающую выбранный режим внутреннего предсказания для блока) в блок 270 энтропийного кодирования в форме элементов 266 синтаксиса для включения в данные 21 кодированного изображения, чтобы, например, видеодекодер 30 мог принимать и использовать параметры предсказания для декодирования.
Внешнее предсказание
Набор (или возможные) режимов внешнего предсказания зависит от доступных опорных изображений (то есть, предшествующих, по меньшей мере, частично декодированных изображений, например, сохраненных в DBP 230) и других параметров внешнего предсказания, например будь то опорное изображение целиком или только его часть, например, окно поиска области вокруг области текущего блока, опорного кадра используется для поиска наилучшего соответствия опорного блока и/или, например, применяется ли интерполяция пикселей, например, интерполяция пол/полупикселя, четверти пикселя и/или 1/16 пикселя или нет.
В дополнение к вышеупомянутым режимам предсказания может применяться режим пропуска и/или прямой режим.
Блок 244 внешнего предсказания может включать в себя блок оценки движения (ME) и блок компенсации движения (МС) (оба не показаны на фиг. 2). Блок оценки движения выполнен с возможностью принимать или получать блок 203 изображения (текущий блок 203 изображения текущего изображения 201) и декодированное изображение 231 или, по меньшей мере, один или множество ранее восстановленных блоков, например, восстановленные блоки одного или множества других/различных ранее декодированных изображений 231 для оценки движения. Например, видеопоследовательность может содержать текущее изображение и ранее декодированные изображения 231 или, другими словами, текущее изображение и ранее декодированные изображения 231 могут быть частью или формировать последовательность изображений, образующих видеопоследовательность.
Кодер 20 может, например, быть выполнен с возможностью выбирать опорный блок из множества опорных блоков одинаковых или различных изображений из множества других изображений и предоставлять опорное изображение (или индекс опорного изображения) и/или сдвиг (пространственное сдвиг) между позицией (х, у координат) опорного блока и позицией текущего блока в качестве параметров внешнего предсказания в блок оценки движения. Это сдвиг также называется вектором движения (MV).
Блок компенсации движения выполнен с возможностью получать, например, принимать параметр внешнего предсказания и выполнять внешнее предсказание на основании или с использованием параметра внешнего предсказания для получения блока 265 внешнего предсказания. Компенсация движения, выполняемая блоком компенсации движения, может содержать выборку или генерирование блока предсказания на основании вектора движения/блока, определяемого оценкой движения, возможно выполнение интерполяции до субпиксельной точности. Интерполяционная фильтрация может генерировать дополнительные выборки пикселей из известных выборок пикселей, таким образом, потенциально увеличивая количество кандидатов блоков предсказания, которые могут использоваться для кодирования блока изображения. После приема вектора движения для PU текущего блока изображения блок компенсации движения может локализовать блок предсказания, на который указывает вектор движения, в одном из списков опорных изображений.
Блок компенсации движения может также генерировать элементы синтаксиса, ассоциированные с блоками и сегментом видео, для использования видеодекодером 30 при декодировании блоков изображения сегмента видео.
Энтропийное кодирование
Блок 270 энтропийного кодирования выполнен с возможностью применять алгоритм или схемы энтропийного кодирования (например, схемы кодирования с переменной длиной (VLC), контекстно-адаптивной схемы VLC (CALVC), схемы арифметического кодирования, контекстно-адаптивного двоичного арифметического кодирования (САВАС), основанное на синтаксисе контекстно-адаптивное двоичное арифметическое кодирование (SBAC), энтропийное кодирование с интервалом вероятности (PIPE) или другие технологии или способы энтропийного кодирования) или схему обхода (без сжатия) на квантованных остаточных коэффициентах 209, параметрах внешнего предсказания, параметрах внутреннего предсказания и/или параметрах контурного фильтра и/или других элементах синтаксиса для получения данных 21 закодированного изображения, которые могут выводиться посредством выхода 272, например, в форме кодированного битового потока 21, так что, например, декодер 30 может принимать и использовать параметры для декодирования. Закодированный битовый поток 21 может быть передан в видеодекодер 30 или сохранен в памяти для последующей передачи или извлечения видеодекодером 30.
Для кодирования видеопотока могут использоваться другие структурные вариации видеокодера 20. Например, кодер 20, не основанный на преобразовании, может квантовать остаточный сигнал напрямую без блока 206 обработки преобразования для конкретных блоков или кадров. В другой реализации кодер 20 может иметь блок 208 квантования и блок 210 обратного квантования, объединенные в единый блок.
Декодер и способ декодирования
На фиг. 3 показан пример видеодекодера 30, который выполнен с возможностью реализации способов настоящего раскрытия. Видеодекодер 30 выполнен с возможностью принимать данные 21 кодированного изображения (например, кодированного битового потока 21), например, кодируемые кодером 20, для получения декодированного изображения 331. Данные кодированного изображения или битовый поток содержит информацию для декодирования данных кодированного изображения, например, данные, которые представляют собой блоки изображения кодированного сегмента видео и ассоциированные элементы синтаксиса.
В примере на фиг. 3, декодер 30 содержит блок 304 энтропийного декодирования, блок 310 обратного квантования, блок 312 обработки обратного преобразования, блок 314 восстановления (например, сумматор 314), контурный фильтр 320, буфер 330 декодированного изображения (DBP), блок 344 внешнего предсказания и блок 354 внутреннего предсказания. Блок внешнего предсказания может быть или включать в себя блок компенсации движения. Видеодекодер 30 может, в некоторых примерах, выполнять процесс декодирования, в целом, обратный этапу кодирования, описанный применительно к видеокодеру 100 на фиг. 2.
Как объяснялось в отношении кодера 20, блок 210 обратного квантования, блок 212 обработки обратного преобразования, блок 214 восстановления, контурный фильтр 220, буфер 230 декодированного изображения (DPB), блок 344 внешнего предсказания и блок 354 внутреннего предсказания также называется формированием «встроенного декодера» видеокодера 20. Соответственно, блок 310 обратного квантования может быть идентичен по функциям блоку 110 обратного квантования, блок 312 обработки обратного преобразования может быть идентичным по функциям блоку 212 обработки обратного преобразования, блок 314 восстановления может быть идентичен по функциям блоку 214 восстановления, контурный фильтр 320 может быть идентичен по функциям контурному фильтру 220 и буфер 330 декодированного изображения может быть идентичен по функциям буферу 230 декодированного изображения. Следовательно, пояснения, предоставленные для соответствующих блоков и функций видеокодера 20, применяются соответственно к соответствующим блокам и функциям видеодекодера 30.
Энтропийное декодирование
Блок 304 энтропийного декодирования выполнен с возможностью выполнять синтаксический анализ битового потока 21 (или, в общем, данных 21 закодированного изображения) и выполнять, например, энтропийное декодирование данных 21 кодированного изображения для получения, например, квантованных коэффициентов 309 и/или параметров декодированного кодирования (не показано на фиг. 3), например, любого или всех параметров внешнего предсказания (например, индекс опорного изображения и вектор движения), параметров внутреннего предсказания (например, режим внутреннего предсказания или индекс), параметров преобразования, параметров квантования, параметров контурного фильтра и/или других элементов синтаксиса. Блок 304 энтропийного декодирования может быть выполнен с возможностью применять алгоритмы или схемы декодирования, соответствующие схемам кодирования, как описано в отношении блока 270 энтропийного кодирования кодера 20. Блок 304 энтропийного декодирования может быть дополнительно выполнен с возможностью предоставлять параметры внешнего предсказания, параметр внутреннего предсказания и/или другие элементы синтаксиса в блок 360 выбора режима и другие параметры в другие блоки декодера 30. Видеодекодер 30 может принимать элементы синтаксиса на уровне сегмента видео и/или уровне видеоблока.
Обратное квантование
Блок 310 обратного квантования может быть выполнен с возможностью принимать параметры квантования (QP) (или, в общем, информацию, относящуюся к обратному квантованию) и квантованные коэффициенты из данных 21 кодированного изображения (например, путем синтаксического анализа и/или декодирования, например, посредством блока 304 энтропийного декодирования) и применять на основании параметров квантования обратное квантование к декодированным квантованным коэффициентам 309 для получения деквантованных коэффициентов 311, которые также могут называться коэффициентами 311 преобразования. Процесс обратного квантования может включать в себя использование параметра квантования, определенного видеокодером 20 для каждого блока видео в сегменте видео, для определения степени квантования и аналогично степени обратного квантования. Обратное преобразование
Блок 312 обработки обратного преобразования может быть выполнен с возможностью принимать деквантованные коэффициенты 311, также называемые коэффициентами 311 преобразования и применять преобразования к деквантованным коэффициентам 311 для получения восстановленных остаточных блоков 213 в области выборки. Восстановленные остаточные блоки 213 также могут называться блоками 313 преобразования. Преобразование может быть обратным преобразованием, например, обратным DCT, обратным DST, обратным целочисленным преобразованием или концептуально аналогичным процессом обратного преобразования. Блок 312 обработки обратного преобразования может быть дополнительно выполнен с возможностью принимать параметры преобразования или соответствующую информацию из данных 21 закодированного изображения (например, путем синтаксического анализа и/или декодирования, например, посредством блока 304 энтропийного декодирования) для определения преобразования, которое должно применяться к деквантованным коэффициентам 311.
Восстановление
Блок 314 восстановления (например, сумматор 314) выполнен с возможностью добавлять восстановленный остаточный блок 313 к блоку 365 предсказания для получения восстановленного блока 315 в области выборки, например, путем сложения значений выборок восстановленного остаточного блока 313 и значений выборок блока 365 предсказания.
Фильтрация
Блок 320 контурного фильтра (либо в контуре кодирования, либо после контура кодирования) выполнен с возможностью фильтрации восстановленного блока 315 для получения отфильтрованного блока 321, например, для сглаживания переходов пикселей или иного повышения качества видео. Блок 320 контурного фильтра может содержать один или несколько контурных фильтров, таких как фильтр деблокинга, фильтр с адаптивным сдвигм (SAO) или один или несколько других фильтров, например, двунаправленный фильтр, адаптивный контурный фильтр (ALF), фильтр сглаживания, фильтр увеличения резкости или коллоборативные фильтры или любую их комбинацию. Хотя на фиг. 3 показан блок 320 контурного фильтра как контурный фильтр, в других конфигурациях блок 320 контурного фильтра может быть реализован как постконтурный фильтр.
Буфер декодированного изображения
Затем декодированные видеоблоки 321 в данном кадре или изображении сохраняются в буфере 330 декодированного изображения, в котором хранятся декодированные изображения 331 в качестве опорных изображений, используемые для последующей компенсации движения для других изображений и/или вывода соответствующего изображения для отображения на дисплее.
Декодер 30 выполнен с возможностью выводить декодированное изображение 331, например, через выход 332 для представления или просмотра пользователю.
Предсказание
Блок 344 внешнего предсказания может быть идентичен блоку 244 внешнего предсказания (в частности, блоку компенсации движения) и блок 354 внутреннего предсказания может быть идентичен блоку 254 внешнего предсказания по функциям и выполняет решения о разделении или разбиении и предсказания на основании параметров разделения и/или предсказания или соответствующей информации, принятой из данных 21 закодированного изображения (например, путем синтаксического анализа и/или декодирования, например, посредством блока 304 энтропийного декодирования). Блок 360 выбора режима может быть выполнен с возможностью выполнять предсказание (внутреннее или внешнее предсказание) для каждого блока на основании восстановленных изображений, блоков или соответствующих выборок (фильтрованных или нефильтрованных) для получения блока 365 предсказания.
Когда сегмент видео кодируется как внутри кодированный (I) сегмент, блок 354 внутреннего предсказания блока 360 выбора режима выполнен с возможностью генерировать блок 365 предсказания для блока изображения текущего сегмента видео на основании сигнализируемого режима внутреннего предсказания и данных из ранее декодированных блоков текущего изображения. Когда видеоизображение кодируется как внешне кодируемый (то есть, В или Р) сегмент, блок 344 внешнего предсказания (например, блок компенсации движения) блока 360 выбора режима выполнен с возможностью формировать блоки 365 предсказания для блока видео текущего сегмента видео на основании векторов движения и других элементов синтаксиса, принятых из блока 304 энтропийного декодирования. Для внешнего предсказания блоки предсказания могут быть сформированы из одного из опорных изображений в одном из списков опорных изображений. Видеодекодер 30 может составлять списки опорных кадров, список 0 и список 1, используя способы построения по умолчанию на основании опорных изображений, хранящихся в DPB 330.
Блок 360 выбора режима выполнен с возможностью определять информацию предсказания для блока видео текущего сегмента видео путем анализа векторов движения или других элементов синтаксиса, и использует информацию предсказания для формирования блоков предсказания для текущего декодируемого блока видео. Например, блок 360 выбора режима использует некоторые из принятых элементов синтаксиса для определения режима предсказания (например, внутреннее или внешнее предсказание), используемого для кодирования блоков видео сегмента видео, типа сегмента внешнего предсказания (например, В-сегмент, Р-сегмент или GPB-сегмент), информации о построении для одного или нескольких списков опорных изображений для сегмента, векторов движения для каждого внешне кодированного блока видео сегмента, статус внешнего предсказания для каждого внешне кодированного блока видео сегмента и другую информацию для декодирования блоков видео в текущем сегменте видео.
Для декодирования данных 21 закодированного изображения могут использоваться другие варианты видеодекодера 30. Например, декодер 30 может формировать выходной видеопоток без блока 320 контурной фильтрации. Например, декодер 30, не основанный на преобразовании, может выполнять обратное преобразование квантования остаточного сигнала напрямую без блока 312 обработки обратного преобразования для определенных блоков или кадров. В другой реализации видеодекодер 30 может иметь блок 310 обратного квантования и блок 312 обработки обратного преобразования, объединенные в один блок.
Следует понимать, что в кодере 20 и декодере 30 результат обработки текущего этапа может быть дополнительно обработан и затем выведен на следующий этап. Например, после интерполяционной фильтрации, вывода вектора движения или контурной фильтрации может выполняться дополнительная операция, такая как ограничение или сдвиг, над результатом обработки интерполяционной фильтрации, вывода вектора движения или контурной фильтрации.
Следует отметить, что к полученным векторам движения текущего блока (включающие в себя, но не ограничивающие, векторы движения точки управления аффинного режима, векторы движения субблока аффинного, планарного, ATMVP режимов, временные векторы движения и т.п.) могут быть применены дополнительные операции. Например, значение вектора движения ограничивается заданным диапазоном в соответствии с его представляющим битом. Если представляющий бит вектора движения является bitDepth, то диапазон составляет -2∧ (bitDepth-1)~2∧(bitDepth-1)-1, в котором «∧» означает возведение в степень. Например, если bitDepth установлен равный 16, то диапазон составляет -32768~32767; если bitDepth установлен равным 18, то диапазон составляет -131072 ~ 131071. Например, значение полученного вектора движения (например, MVs четырех 4×4 субблоков в пределах одного 8×8 блока) ограничено таким образом, что максимальная разница между целыми частями четырех 4×4 субблока MVs не превышает N пикселей, например, не более 1 пикселя. Настоящее раскрытие предлагает два способа для ограничения вектора движения в соответствии с bitDepth.
Способ 1: удалить переполнение MSB (наиболее значимый бит) посредством операций истечения
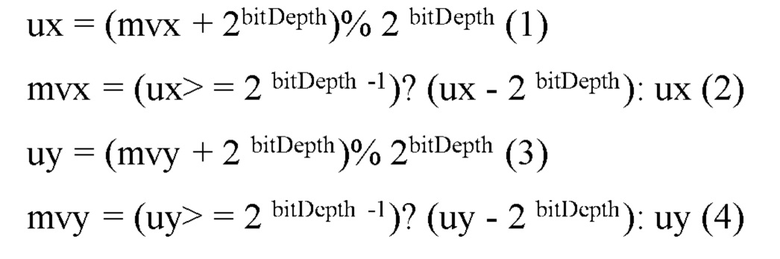
в котором mvx является горизонтальным компонентом вектора движения блока изображения или субблока, mvy является вертикальным компонентом вектора движения блока изображения или субблока и ux и uy указывают на промежуточное значение;
Например, если значение mvx составляет -32769, после применения формулы (1) и (2), полученное значение составляет 32767. В компьютерной системе десятичные числа хранятся в виде двоичной компоненты. Двоичная компонента -32769 составляет 1, 0111,1111,1111,1111 (17 битов) и MSB отбрасывается, поэтому полученная двоичная компонента равна 0111,1111,1111,1111 (десятичное число 32767), что является таким же, как выходное значение после применения формулы (1) и (2).
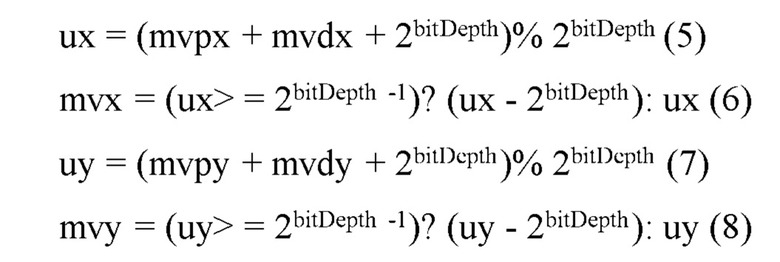
Операции могут быть применены во время суммирования mvp и mvp, как показано в формуле (5) до (8).
Способ 2: удалить переполнение MSB посредством ограничения значения
в котором vx является горизонтальным компонентом вектора движения блока изображения или субблока, vy является вертикальным компонентом вектора движения блока изображения или субблока; х, у и z соответствуют трем входным значениям процесса ограничения MV и определение функции Clip3 является следующим: 
Фиг. 4 является схемой устройства 400 кодирования видео согласно варианту осуществления настоящего раскрытия. Устройство 400 кодирования видео подходит для реализации раскрытых вариантов осуществления, как описано в данном документе. В варианте осуществления устройство 400 кодирования видео может быть декодером, таким как видеодекодер 30 по фиг. 1А или кодер, такой как видеокодер 20 по фиг. 1А.
Устройство 400 кодирования видео содержит входные порты 410 и блоки 420 приемника (Rx) для приема данных; процессор, логический блок или центральный процессор (CPU) 430 для обработки данных; блоки 440 передатчика (Тх) и выходные порты 450 для передачи данных; и память 460 для хранения данных. Устройство 400 кодирования видео может также содержать оптико-электрические (ОЕ) компоненты и электрические-оптические (ЕО) компоненты, подключенные к входным портам 410, блокам 420 приемника, блокам 440 передатчика и выходным портам 450 для вывода или ввода оптических или электрических сигналов.
Процессор 430 реализован аппаратным обеспечением и программным обеспечением. Процессор 430 может быть реализован как одна или несколько микросхем CPU, ядер (например, как многоядерный процессор), FPGAs, ASICs и DSPs. Процессор 430 связан с входными портами 410, блоками 420 приемника, блоками 440 передатчика, выходными портами 450 и памятью 460. Процессор 430 содержит модуль 470 кодирования. Модуль 470 кодирования реализует раскрытые варианты осуществления, описанные выше. Например, модуль 470 кодирования реализует, обрабатывает, подготавливает или предоставляет различные операции кодирования. Таким образом, использование модуля 470 кодирования обеспечивает существенное улучшение функциональных возможностей устройства 400 кодирования видео и обеспечивает преобразование устройства 400 кодирования видео в другое состояние. В качестве альтернативы модуль 470 кодирования реализован как инструкции, хранящиеся в памяти 460 и выполняемые процессором 430.
Память 460 содержит один или несколько дисков, ленточных накопителей и твердотельных накопителей и может использоваться в качестве устройства хранения данных с переполнением, для хранения программ, когда такие программы выбраны для выполнения, и для хранения инструкций и данных, которые считываются во время выполнения программы. Память 460 может быть энергозависимой и/или энергонезависимой и может представлять собой постоянную память (ROM), оперативную память (RAM), троичную память с адресацией по содержимому (TCAM) и/или статическую память с произвольным доступом (SRAM).
Фиг. 5 является упрощенной блок-схемой устройства 500, которое может использоваться как одно или оба устройство 310 источника и устройство 320 назначения по фиг. 1 согласно примерному варианту осуществления.
Процессор 502 в устройстве 500 может быть центральным процессором. В качестве альтернативы процессор 502 может быть устройством любого другого типа или множеством устройств, способных манипулировать или обрабатывать информацию, существующую в настоящее время или разработанную в будущем. Хотя раскрытые реализации могут быть реализованы с одним процессором, как показано, например, с процессором 502, преимущества в скорости и эффективности могут быть достигнуты с использованием более чем одного процессора.
В реализации память 504 в устройстве 500 может быть постоянным запоминающим устройством (ROM) или устройством оперативной памяти (RAM). В качестве памяти 504 может использоваться любой другой подходящий тип запоминающего устройства. Память 504 может включать в себя код и данные 506, к которым обращается процессор 502 с использованием шины 512. Память 504 может дополнительно содержать в себя операционную систему 508 и прикладные программы 510, прикладные программы 510 включают в себя, по меньшей мере, одну программу, которая позволяет процессору 502 выполнять описанные в настоящем документе способы. Например, прикладные программы 510 могут содержать в себя приложения с 1 по N, которые дополнительно включают в себя приложение кодирования видео, которое выполняет описанные здесь способы.
Устройство 500 также может включать в себя одно или несколько устройств вывода, таких как дисплей 518. Дисплей 518 может быть, в одном примере, сенсорным дисплеем, который объединяет дисплей с сенсорным элементом, способным распознавать сенсорные вводы. Дисплей 518 может быть подключен к процессору 502 через шину 512.
Хотя изображена как одна шина, шина 512 устройства 500 может состоять из нескольких шин. Кроме того, вторичное хранилище 514 может быть напрямую связано с другими компонентами устройства 500 или может быть доступно через сеть и может содержать один интегрированный блок, такой как карта памяти, или несколько блоков, например, несколько карт памяти. Таким образом, устройство 500 может быть реализовано в широком разнообразии конфигураций.
Конкретная реализация упрощенной PDPC может быть выполнена по-разному, в зависимости от режима внутреннего предсказания:
Для планарного, DC, HOR/VER режимов внутреннего предсказания (обозначенные, как 0, 1, 18, 50 соответственно на фиг.7 и фиг.8), выполняются следующие этапы:
Предсказанная выборка Р(х,у), расположенная на (х, у), рассчитывается следующим образом:

в котором  представляют собой опорные выборки, расположенные сверху и слева от текущей выборки (х, у), и
представляют собой опорные выборки, расположенные сверху и слева от текущей выборки (х, у), и  представляет собой опорную выборку, расположенную в верхнем левом углу текущего блока, функция clip1Cmp устанавливается следующим образом:
представляет собой опорную выборку, расположенную в верхнем левом углу текущего блока, функция clip1Cmp устанавливается следующим образом:
- если cIdx равен 0, clip1Cmp устанавливается равным Clip1Y.
- в противном случае, clip1Cmp устанавливается равным Clip1C
BitDepthy является битовой глубиной выборок яркости.
BitDepthc является битовой глубиной выборок цветности.
BitDepthy и BitDepthc могут быть сигнализированы в наборе параметров последовательности (SPS) битового потока.
Возможны альтернативные определения Clip1Y (х) и Clip1C (с). В частности, как описано F. Galpin, P. Bordes и F. Le Léannec в JVET-C0040 «Адаптивное ограничение в
ГЕМ2.0», 
в котором minC является нижней границей ограничения, используемая в текущем сегменте для компонента ID С,
maxC является верхней границей ограничения, используемого в текущем сегменте для компонента ID С,
С представляет собой цветовой компонент (например, Y для яркости, Cb и Cr для цветности),
«х >> у» является арифметическим правым сдвигом целочисленного представления двоичного комплемента х на у двоичных цифр. Эта функция определяется только для неотрицательных целочисленных значений у. Биты, сдвинутые в наиболее значимые биты (MSBs) в результате правого сдвига, имеют значение, равное MSB х до операции сдвига.
Веса DC режима рассчитывается следующим образом:
wT=32>>((у<<l)>>shift),
vL=32>>((x<<l)>>shift),
wTL=-(wL>> 4)-(wT>>4).
в котором 
Для планарного режима wTL=0, в то время, как для горизонтального режима wTL=wT и для вертикального режима wTL=wL. PDPC веса (wL, wT, wTL) DC режима для (0, 0) и (1, 0) позиций внутри одного 4x4 блока показаны на фиг. 9.
Для диагонального (обозначается как 2 и 66 на фиг. 7 и фиг. 8) и соседнего режимов (направленные режимы не менее 58 и не более 10 на фиг. 7 или фиг. 8) выполняется обработка, как описано ниже, используя одинаковую формулу (1).
Фиг. 10А иллюстрирует определение опорных выборок  для расширения PDPC до верхнего правого диагонального режима. Выборка предсказания pred(x', у') находится в (х', у') в блоке предсказания. Координата х опорной выборки Rx,-1 задана:
для расширения PDPC до верхнего правого диагонального режима. Выборка предсказания pred(x', у') находится в (х', у') в блоке предсказания. Координата х опорной выборки Rx,-1 задана:
х=х'+у'+1,
и координата у опорной выборки R1,у задана аналогичным образом: у=х'+у'+1.
PDPC веса для верхнего диагонального режима являются:
wT=16>>((у'<<1)>>shift),
wL=16>>((х'<<1)>>shift),
wTL=0.
Аналогично, фиг. 10В иллюстрирует определение опорных Rx,-1, R-1,y и R-1,-1 для расширения PDPC до нижнего левого диагонального режима. Координата х опорной выборки Rx,-1 задана:
х=х'+у'+1,
и координата у опорной выборки R-1,y задана:
у=х'+у'+1.
PDPC для верхнего диагонального режима:
wT=16>>((у'<<1)>>shift),
wL=16>>((х'<<1)>>shift),
wTL=0.
На фиг. 10С показан случай соседнего верхнего правого диагонального режима. PDPC веса для соседнего верхнего правого диагонального режима являются:
wT=32>>((у'<<1)>>shift),
wL=0,
wTL=0.
Аналогично, на фиг. 10D показан случай соседнего нижнего левого диагонального режима. PDPC веса для соседнего нижнего левого диагонального режима являются:
wL=32>>((х'<<1)>>shift),
wT=0,
wTL=0.
Координаты опорной выборки для последних двух случаев вычисляются с использованием таблиц, которые уже используются для углового режима внутреннего предсказания. Используется линейная интерполяция опорных выборок, если вычисляются координаты дробной опорной выборки.
Упрощенный PDPC может быть выполнен, как указано в VVC спецификации. Далее используются следующие обозначение:
 является значением обратного угла, Round(х)=Sign(х)*Floor(Abs(x)+0.5),
является значением обратного угла, Round(х)=Sign(х)*Floor(Abs(x)+0.5),
Floor (x) является наибольшим целым числом меньше или равно х,
Log2 (х) является логарифм х с основанием 2.
IntraPredAngle является параметром угла, указанного в таблице 6,
А=С?В:D является операцией тройного назначения, в котором А устанавливается равным В, если условие С верно. В противном случае, если условие С является ложным, А установлен равный D.
INTRA_PLANAR является планарным режимом внутреннего предсказания (),
INTRA_DC является DC режимом внутреннего предсказания,
INTRA_ANGULARXX является одним из направленных режимов внутреннего предсказания, в котором XX обозначает его число и соответствующее направление, показанное на фиг. 8.
Если термин не объясняется в настоящем изобретении, очевидно, что его определение можно найти в VVC спецификации или HEVC/H.265 стандартной спецификации.
Учитывая вышеприведенное описание, этапы упрощенного PDPC могут быть определены следующим образом:
Входные данные к этому процессу являются:
- режим внутреннего предсказания predModeIntra,
- переменная nTbW, указывающая ширину блока преобразования,
- переменная nTbH, указывающая высоту блока преобразования,
- переменная refW, указывающая ширину опорных выборок,
- переменная refH, указывающая высоту опорных выборок,
- предсказанные выборки predSamples[х][у], с х=0…nTbW-1, у=0….nTbH-1,
- соседние выборки р[х][у], с х=-1, у=-1…refH-1 и х=0…refW-1, у=-1,
- переменная cIdx, указывающая цветовой компонент текущего блока.
Выходные данные этого процесса являются модифицированными предсказанными выборками predSamples[х][у] с х=0…nTbW-1, у=0…nTbH-1.
В зависимости от значения cIdx функция clip1Cmp устанавливается следующим образом:
- если cIdx равен 0, clip1Cmp устанавливается равным Clip1Y.
- в противном случае, clip1Cmp устанавливается равным Clip1c.
Переменная nScale установлена на ((Log2(nTbW)+Log2(nTbH)-2)>>2).
Массивы опорной выборки mainRef[х] и sideRef[у], с х=0…refW-1 и у=0…refH-1 получены следующим образом:
mainRef[х]=р[х][-1] sideRef[у]=р[-1][у]
Переменные refL[х][у], refT[х][у], wT[у], wL[х] и wTL[х][у] с х=0…nTbW-1, у=0…nTbH-1 получены следующим образом:
- если predModeIntra равен INTRA_PLANAR, INTRA_DC, INTRA_ANGULAR 18 или INTRA_ANGULAR50, применяется следующее:
refL[x][y]=p[-1][y]
refT[x][y]=p[x][-1]
wT[у]=32>>((у<<1)>>nScale)
wL[х]=32>>((х<<1)>>nScale)
wTL[x][у]=(predModeIntra=INTRA_DC) ? ((wL[x]>>4)+(wT[у]>>4)): 0
- в противном случае, если predModeIntra равен INTRA_ANGULAR2 или INTRA_ANGULAR66, применяется следующее:
refL[x][y]=p[-1][x+y+l]
refT[x][y]=p[x+y+1][-1]
wT[у]=(32>>1)>>((у<<1)>>nScale)
wL[х]=(32>>1)>>((х<<1)>>nScale)
wTL[x][y]=0
- в противном случае, если predModeIntra меньше или равен INTRA_ANGULAR10, применяются следующие упорядоченные этапы:
1. Переменные dXPos[у], dXFrac[у], dXInt[у] and dX[х][у] получены следующим образом, используя invAngle:
2. Переменные refL[х][у], refT[х][у], wT[у], wL[х] и wTL[х][у] получены следующим образом:
- в противном случае, если predModeIntra больше или равно INTRA_ANGULAR58 (см. фиг. 8), применяются следующие упорядоченные этапы:
1. переменные dYPos[х], dYFrac[х], dYInt[х] и dY[х][у] получены следующим образом, используя invAngle, как указано ниже в зависимости от intraPredMode:
2. Переменные refL[х][у], refT[х][у], wT[у], wL[х] и wTL[х][у] получены следующим образом:
- в противном случае refL[х][у], refT[х][у], wT[у], wL[х] и wTL[х][у] все установлены равными 0.
Значения модифицированных предсказанных выборок predSamples[х][у] с х=0…nTbW-1, у=0…nTbH-1 получены следующим образом:

В уравнении 1 используется для упрощенной PDPC для интерполяции ближайшего соседа вместо линейной:
refT[х][у]=(dX[х][у]<refW-1) ? mainRef[dX[х][у]]: 0
Точно так же назначение уравнения 2 может также использовать интерполяцию ближайшего соседа:
refL[х][у]=(dY[х][у]<refH-1) ? sideRef[dY[х][у]]: 0
Таким образом, на обоих сторонах кодера и декодера предлагаемый способ использует следующее в качестве входных данных:
направленный режим внутреннего предсказания (дополнительно обозначается как predModeIntra, который показан на фиг. 7 и фиг. 8)
параметр nTbS размера блока, который устанавливается равным (log2(nTbW)+Log2(nTbH))>>1, в котором nTbW и nTbH обозначают ширину и высоту предсказанного блока, соответственно, и «>>» обозначает операцию правого сдвига.
Модификация VVC спецификации, которая позволяет использовать предложенный способ, может содержать замену «соседних выборок р[х][у]» на «опорные выборки р[х][у]» в разделе, описывающем упрощенную PDPC.
Угловой параметр intraPredAngle обозначает сдвиг субпикселя между двумя соседними строками предсказанных выборок в представлении фиксированной точки, имеющей длину дробной части, равной 5-битам. Этот параметр может быть получен из режима внутреннего предсказания, полученный из predModeIntra, и примерное получение intraPredAngle из predModeIntra может быть определено посредством LUT, например, как показано в таблице 1.
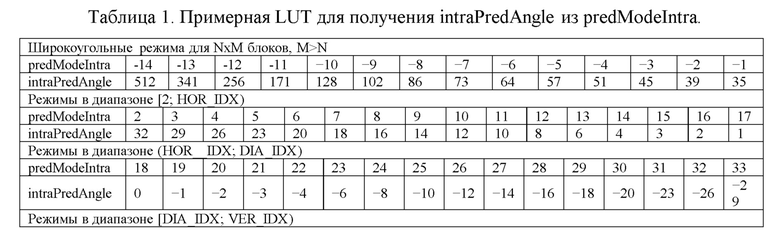

В настоящем изобретении предлагается обновлять предсказанные выборки, полученные из опорных выборок с использованием направленного, планарного или DC режимов внутреннего предсказания. На фиг. 11 показаны этапы процедуры обновления. На первому этапе 1101 выполняется вычисление значений nScaleX и nScaleY масштаба в зависимости от формы и размера блока. Дополнительно на фиг. 13 проиллюстрирована форма реализации вычисления.
Этапы 1103 и 1104 выполняются в цикле по всем позициям предсказанных выборок. На этапе 1102 выполняется инициализация итераций цикла х и у, на этапах 1105 и 1107 выполняются граничные проверки итераций, на этапах 1106 и 1108 выполняется приращения для итераций. На этапе 1108 выполняется сброс итераций х и у к началу следующей строки, т.е. х устанавливается равным нулю и итерация по строке у увеличивается на 1.
На этапе 1103 выполняется вычисление зависящих от позиционирования весовых значений wL[x] и wT[y]. Эти весовые значения получают правым сдвигом базового значения V. Значение V соотнесено с операцией правого сдвига этапа 4. Если правый сдвиг установлен на s, то практическое значение V может быть определено, например, как 2s, 2s-1 или 2s. В примерном варианте осуществления, показанном на фиг. 11, значение s устанавливается равным 6 и значение V устанавливается равным 32, то есть, 25.
В отличие от современных способов, на этапе 1103 wL[x] и wT[y] используют различные значения масштабов nScaleX и nScaleY, соответственно. Эти весовые значения wL[x] и wT[y] дополнительно используются на этапе 1104 для вычисления модифицированного значения предсказанных выборок.
На фиг. 12 показан альтернативный вариант осуществления обновления предсказанных выборок. В этом варианте осуществления вес wT[y] пересчитывается только один раз на строку, то есть, при увеличении итерации у.
Благодаря QTBT и МТТ разделению, блоки предсказания могут не иметь квадратную форму (в основном, прямоугольную). Однако современный PDPC не рассматривает потенциальное неравенство ширины и высоты блока предсказания. Механизм взвешивания, основанный только на значении расстояния до левой и верхней сторон предсказанного блока, может обеспечить слишком сглаженную операцию получения предсказанных выборок, если коэффициент пропорциональности предсказанного блока отличается от 1. В настоящем изобретении предложено решение балансировки эффекта размера блока и коэффициента пропорциональности блока с использованием режима внутреннего предсказания. Используя информацию направления, предоставленную режимом внутреннего предсказания, можно определить расстояние распространения и направленность PDPC эффекта сглаживания. Следовательно, предлагается использовать группу режима внутреннего предсказания и применять выделенную адаптацию масштабирования веса для каждой группы. В этом случае даже продолговатые блоки предсказания будут использовать сглаживание в соответствии с длиной стороны, где целесообразно, в зависимости от режима внутреннего предсказания и размерности блока предсказания.
В предложенном изобретении предлагается использовать отдельные nScale значения при получении весов wT[у] и wL[х]. В частности, в описании выше (этап 1103) будут использоваться следующие формулы (значение V устанавливается, соответственно, на 16 или 32):
wT[у]=V>>((у<<1)>>nScaleY)
wL[х]=V>>((х<<1)>>nScaleX)
Как показано на фиг. 14, может быть выполнено вычисление масштабов (этап 1101). Данный способ является альтернативным вычислением по сравнению с тем, что показано на фиг. 12. На первом этапе 1301 получают значение режима intraPredAngle внутреннего предсказания предсказанного блока, например, посредством синтаксического анализа битового потока. На следующем этапе 1302 выполняется классификация режима внутреннего предсказания на одну из групп.
Далее в описании используется дополнительное определение несимметричного недиагонального режима внутреннего предсказания:
intraPredMode является несимметричным недиагональным, если intraPredMode не равен 2 или VDIA_IDX и одно из следующего является верным: intraPredMode не менее, чем VDIA_IDX - numModes или intraPredMode не превышает 2+numModes
В таблице 2 указана примерная классификация.
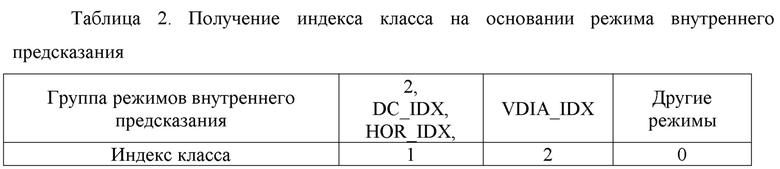
В зависимости от индекса класса режима, получение nScaleX and nScaleY может быть разным. Этапы 1303, …, 1312 представляют отображение индекса класса на формулы получения, как показано в таблице 3.
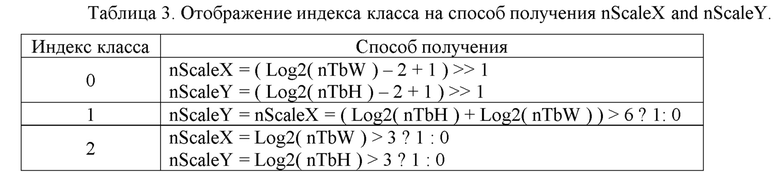
В таблицах 4, 5 и 6 приведены альтернативные классификации.


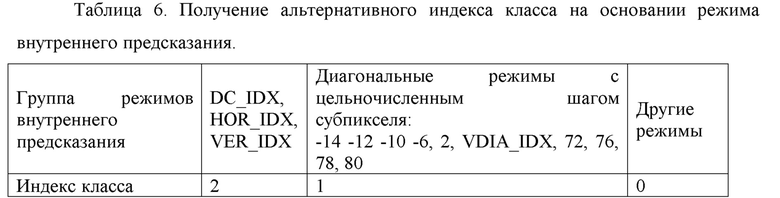
В таблице 6 класс 1 указывает не только диагональные режимы, но и широкоугольные режимы, которые имеют не дробное значение IntraPredAngle (т.е. кратное 32 в таблице 1).
Дополнительное ограничение, которое можно подразумевать по данному изобретению, не применяется к этапам обновления предсказанных выборок в случае конкретных комбинаций условий размера блока и режима внутреннего предсказания (intraPredMode).
Предполагая, что заданный параметр numModes равен 8, конкретная реализация может содержать следующее условие отключения PDPC, то есть, не выполнение обновления предсказанной выборки:
- сумма ширины блока и высоты блока превышает 64 выборок и, либо intraPredMode является несимметричным недиагональным, либо равным PLANAR_IDX.
Конкретные реализации изобретения могут продемонстрировать улучшение производительности сжатия. Модификации программного обеспечения VTM-3.0, описываемое в таблице 4 и таблице 3, приводит к повышению эффективности сжатия (таблица 7).
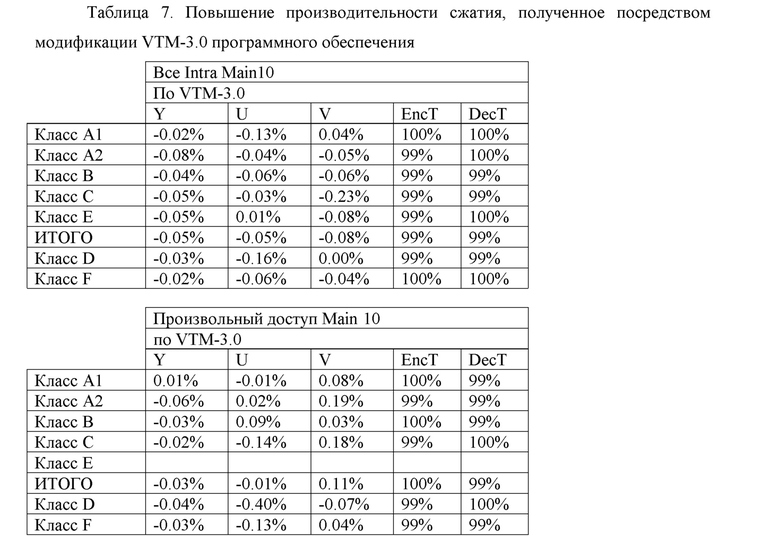
В других вариантах осуществления значение nScale устанавливается зависимым от значения обратного угла, которое получено из режима внутреннего предсказания. Согласно варианту осуществления выполняется следующие этапы для получения значения nScale коэффициента в соответствии со значением режима внутреннего предсказания (predModeIntra):
- получить значение параметра intraPredAngle на основании значения режима предсказания predModeIntra;
- получить значение обратного угла (invAngle) на основании параметра intraPredAngle; и
- получить значение nScale коэффициента на основании размера блока и значения invAngle.
Получение значения intraPredAngle параметра на основании predModeIntra значения режима предсказания может быть реализовано посредством таблицы поиска. Примерная таблица поиска приведена в таблице 8.
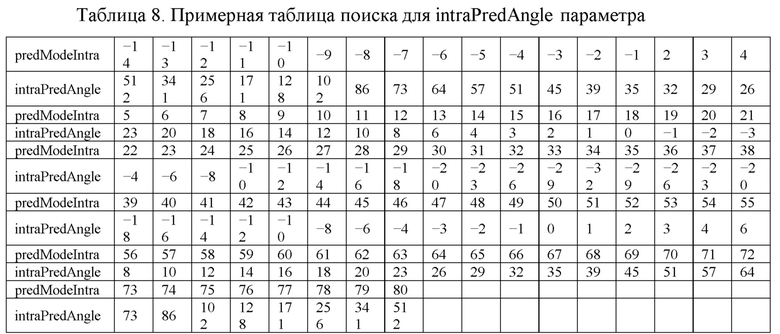
Параметр invAngle обратного угла получен на основании intraPredAngle следующим образом:
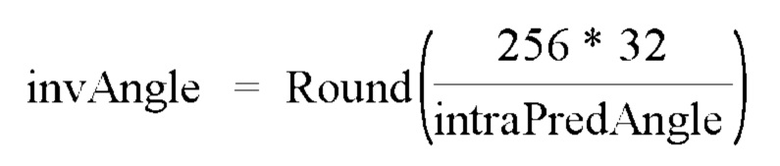
Таблица 9 и таблица 10 используются для указания значения nScale на основании predModelntra и invAngle значений.
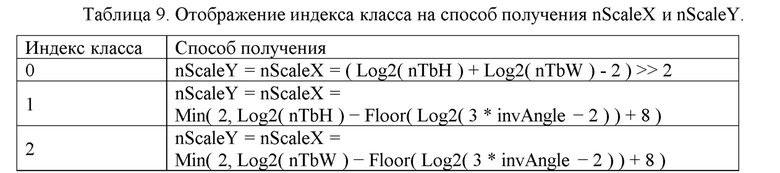

Фиг. 15 показывает этапы настоящего раскрытия в соответствии с классификацией, приведенной в таблице 9 и таблице 10. Переменная, обозначенная в фиг. 13, как «IntraPredAngle» обозначается на фиг.15 как «predModeIntra». Эта переменная указывает на возможность получать предсказанные значения выборок в режиме внутреннего предсказания, которые являются входными значениями в PDPC процессе фильтрации. На фиг. 8 показано соответствие между значениями predModeIntra и направлениями внутреннего предсказания.
Хотя варианты осуществления изобретения были в основном описаны на основании кодирования видео, следует отметить, что варианты осуществления системы 10 кодирования, кодера 20 и декодера 30 (и, соответственно, системы 10) и другие варианты осуществления, описанные в данном документе, также могут быть сконфигурированы для обработки фотографий или кодирования изображений, т.е. обработки или кодирования индивидуального изображения, независимо от любого предшествующего или последовательного изображения, как в кодировании видео. В целом, только блоки 244 (кодер) и 344 (декодер) внешнего предсказания могут быть недоступны в случае, если процесс кодирования изображения ограничен одним изображением 17. Все остальные функции (также называются инструментами или технологиями) видеокодера 20 и видеодекодера 30 могут одинаково использоваться для обработки фотографии, например, вычисление 204/304 остатка, преобразование 206, квантование 208, обратное квантование 210/310, (обратное) преобразование 212/312, разделение 262/362, внутреннее предсказание 254/354 и/или контурная фильтрация 220, 320 и энтропийное кодирование 270 и энтропийное декодирование 304.
Варианты осуществления, например, кодера 20 и декодера 30 и функций, описанные в настоящем изобретении, например, со ссылкой на кодер 20 и декодер 30, могут быть реализованы в аппаратном, программном обеспечении, прошивке или любой их комбинации. Если реализовано в программном обеспечении, функции могут храниться на машиночитаемом носителе или передаваться посредством среды связи в виде одной или более инструкций или кода и выполняемые аппаратным блоком обработки. Машиночитаемый носитель может включать в себя машиночитаемый носитель информации, который соответствует материальному носителю, такому как носитель данных или носитель информации, включающий в себя любой носитель, который облегчает передачу компьютерной программы из одного места в другое, например, в соответствии с протоколом связи. Таким образом, машиночитаемый носитель, как правило, может соответствовать (1) материальному машиночитаемому носителю, который является постоянным, или (2) среде связи, такой как сигнал или волна несущей. Носитель данных может быть любым доступным носителем, который может быть доступен для одного или более компьютеров или одного или более процессоров для получения инструкций, кода и/или структур данных для реализации способов, описанных в настоящем изобретении. Компьютерный программный продукт может включать в себя машиночитаемый носитель.
В качестве примера без ограничения такой машиночитаемый носитель может содержать RAM, ROM, EEPROM, CD-ROM или другой оптический диск, магнитный диск или другие магнитные устройства хранения информации, флэш-память или любой другой носитель, который может использоваться для хранения требуемого программного кода в виде инструкций или структур данных, и которые могут быть доступны компьютером. Кроме того, любое соединение также называется машиночитаемым носителем информации. Например, если инструкции передаются с веб-сайта, сервера или другого удаленного источника с использованием коаксиального кабеля, волоконно-оптического кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводной технологии, такой как инфракрасного, радио и микроволнового диапазона, то коаксиальный кабель, волоконно-оптический кабель, витая пара, DSL или беспроводные технологии, такие как инфракрасного, радио и микроволнового диапазона включены в определение носителя. Однако следует понимать, что машиночитаемый носитель информации и машиночитаемый носитель данных не включают в себя соединения, несущие, сигналы или другие переходные носители, но вместо этого, следует рассматривать в качестве постоянного материального носителя. Диск, как используется в данном документе, включает в себя компактный диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск, Blu-ray диск, в котором диски обычно воспроизводят данные магнитным образом, в то время, как диски воспроизводят данные оптически посредством лазера. Комбинации вышеуказанного также содержаться в объеме определений машиночитаемых носителей.
Инструкции могут быть выполнены одним или несколькими процессорами, такими как один или более процессоры цифровых сигналов (DSPs), микропроцессоры общего назначения, специализированные интегрированные схемы (ASICs), программируемые пользователем вентильные матрицы (FPGAs) или другие эквивалентные интегральные или дискретные логические схемы. Соответственно, термин «процессор», как используется в данном документе, может относиться к любой из вышеупомянутой структуре или любой другой структуре, подходящей для реализации способов, описанных в настоящем изобретении. Дополнительно, в некоторых аспектах функциональные возможности, описанные в данном документе, могут быть предусмотрены в пределах выделенного аппаратного обеспечения и/или модулей программного обеспечения, выполненных с возможностью кодировать и декодировать или содержаться в комбинированном кодеке. Кроме того, способы могут быть полностью реализованы в одной или более схемах или логических элементах.
Способы настоящего раскрытия могут быть реализованы в широком спектре устройств или приспособлений, включающие в себя беспроводную трубку, интегральную схему (IC) или набор ICs (например, набор микросхем). Различные компоненты, модули или блоки описаны в настоящем изобретении для предоставления функциональных аспектов устройств, выполненных с возможностью выполнять описанные способы, но не обязательно требуют реализации различными аппаратными блоками. Скорее, как описано выше, различные блоки могут быть объединены в аппаратном блоке кодека или предоставлены набором взаимодействующих аппаратных блоков, включающие в себя один или более процессоров, как описано выше, в сочетании с подходящим программным обеспечением и/или прошивкой.
Настоящее раскрытие включает в себя следующие дополнительные аспекты.
Первый аспект способа внутреннего предсказывания блока изображения содержит для каждой выборки из множества выборок блока:
определение значения предсказанной выборки из одного или более значений опорной выборки посредством внутреннего предсказания с использованием одного из DC режима внутреннего предсказания, PLANAR режима внутреннего предсказания и углового режима внутреннего предсказания;
умножение значения предсказанной выборки на весовой коэффициент выборки для получения возвышенного значения предсказанной выборки;
определение вертикального коэффициента масштабирования (nScaleY) на основании высоты блока и режима внутреннего предсказания;
определение горизонтального коэффициента масштабирования (nScaleX) на основании ширины блока и режима внутреннего предсказания;
определение первого веса на основании вертикального коэффициента масштабирования (nScaleY);
определение второго веса на основании горизонтального коэффициента масштабирования (nScaleX);
вычисление дополнительного значения в качестве взвешенной суммы значения верхней опорной выборки и значения левой опорной выборки, посредством взвешивания значения верхней опорной выборки первым весом и значения левой опорной выборки вторым весом;
добавление дополнительного значения к взвешенному значению предсказанной выборки для получения ненормированного значения предсказанной выборки; и
нормализация ненормализованного значения предсказанной выборки посредством арифметического правого сдвига целочисленного представления ненормализованного значения предсказанной выборки для получения нормализованного значения предсказанной выборки.
Второй аспект способа в соответствии с первым аспектом, в котором изображение является частью видеопоследовательности.
Третий аспект способа согласно первому или второму аспекту, в котором нормализация ненормализованного значения предсказанной выборки содержит вычисление нормализованного значения предсказанной выборки как

в котором
 является нормализованным значением предсказанной выборки,
является нормализованным значением предсказанной выборки,
P(x,у) является ненормализованным значением предсказанной выборки,
 представляют значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
представляют значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
wL=V>>((х<<1)>>nScaleX) является горизонтальный весовым коэффициентом,
wT=V>>((у<<1)>>nScaleY) является вертикальный весовым коэффициентом,
х является горизонтальной координатой выборки, и
у является вертикальной координатой выборки.
Четвертый аспект способа по любому из предшествующих аспектов, в котором каждая выборка не обновляется, если сумма ширины блока и высоты блока превышает 64 выборки и, либо intraPredMode является несимметричным недиагональным или является PLANAR_IDX.
Пятый аспект кодера (20), содержащий схему обработки для выполнения способа по любому из первого по четвертый аспекты.
Шестой аспект декодера (30), содержащий схему обработки для выполнения способа по любому из первого по четвертый аспекты.
Седьмой аспект компьютерного программного продукта, содержащий программный код для выполнения способа по любому одному из первого по четвертый аспекты.
Восьмой аспект декодера, содержащий: один или более процессоров; и
постоянный машиночитаемый носитель, соединенный с процессорами, и хранящий программы для выполнения процессорами, в котором программы, при выполнении процессорами, конфигурируют декодер выполнить способ по любому одному первому по четвертый аспекты.
Девятый аспект кодера, содержащий:
один или более процессоров; и
постоянный машиночитаемый носитель, соединенный с процессорами, и хранящий программы для выполнения процессорами, в котором программы, при выполнении процессорами, конфигурируют декодер выполнить способ по любому одному первому по четвертый аспекты.
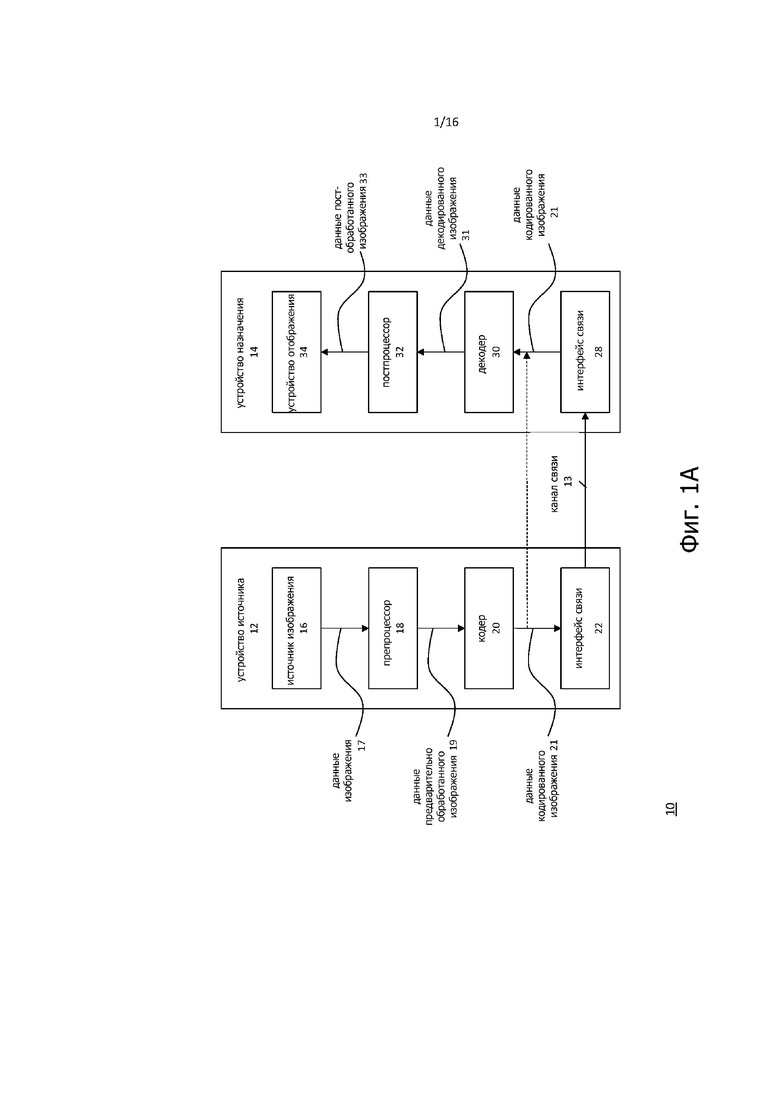
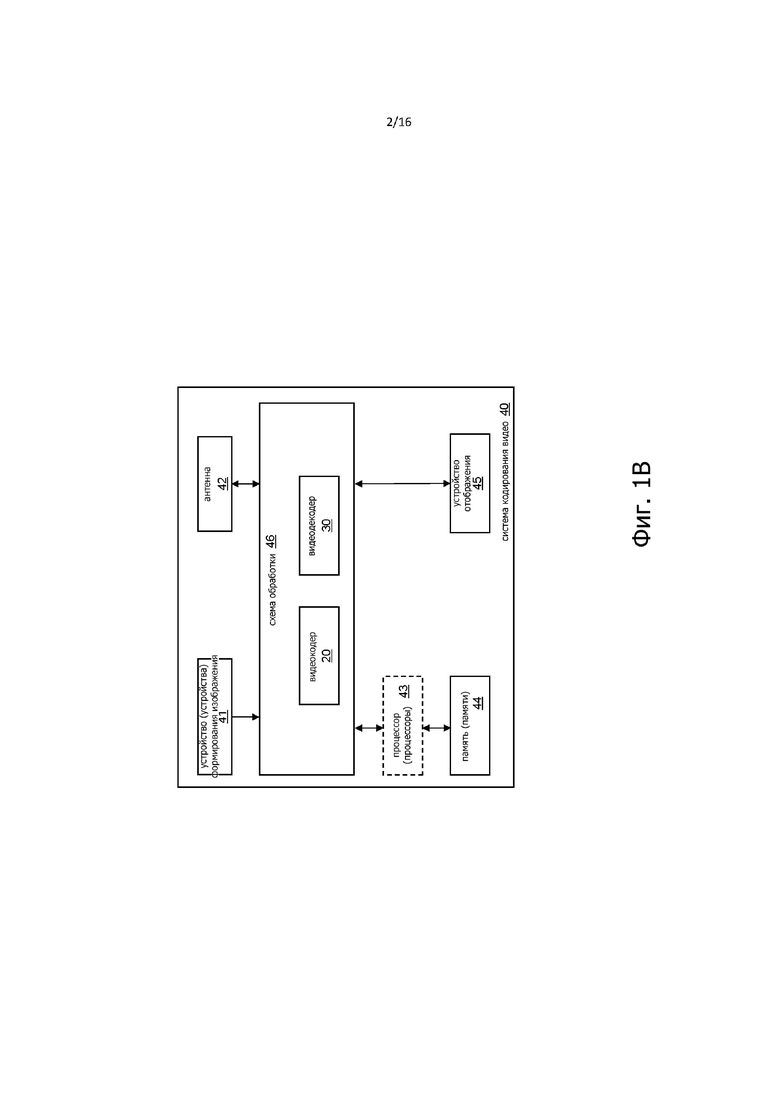
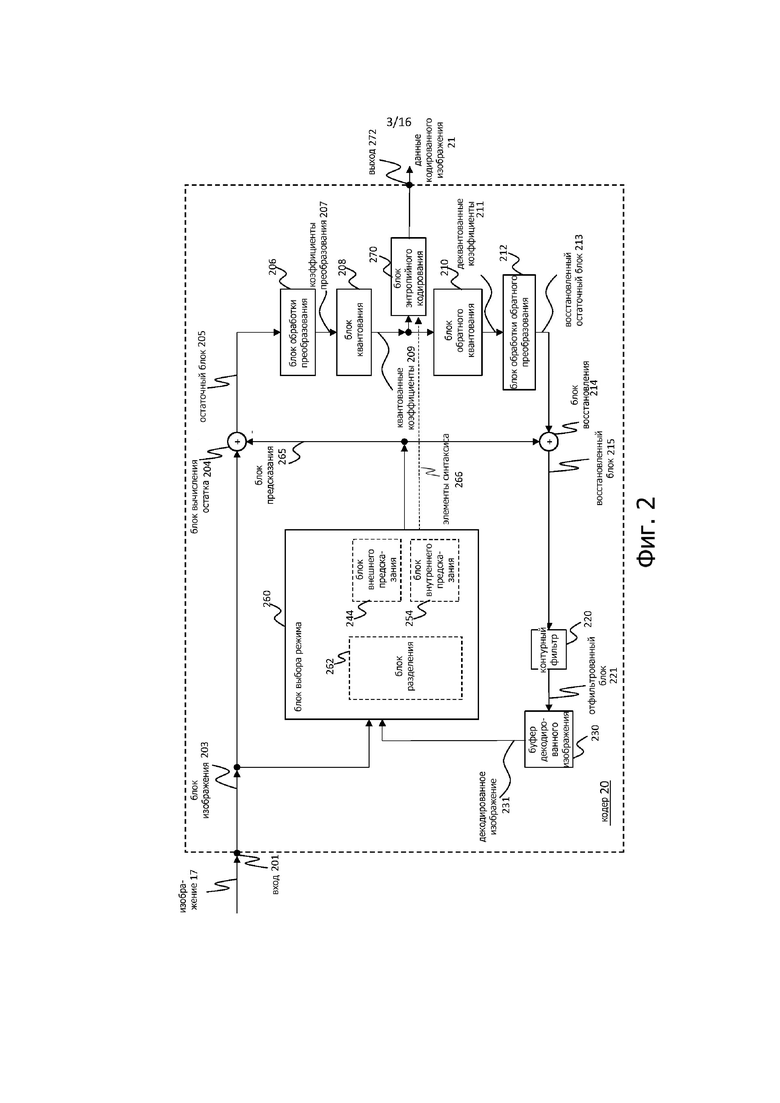
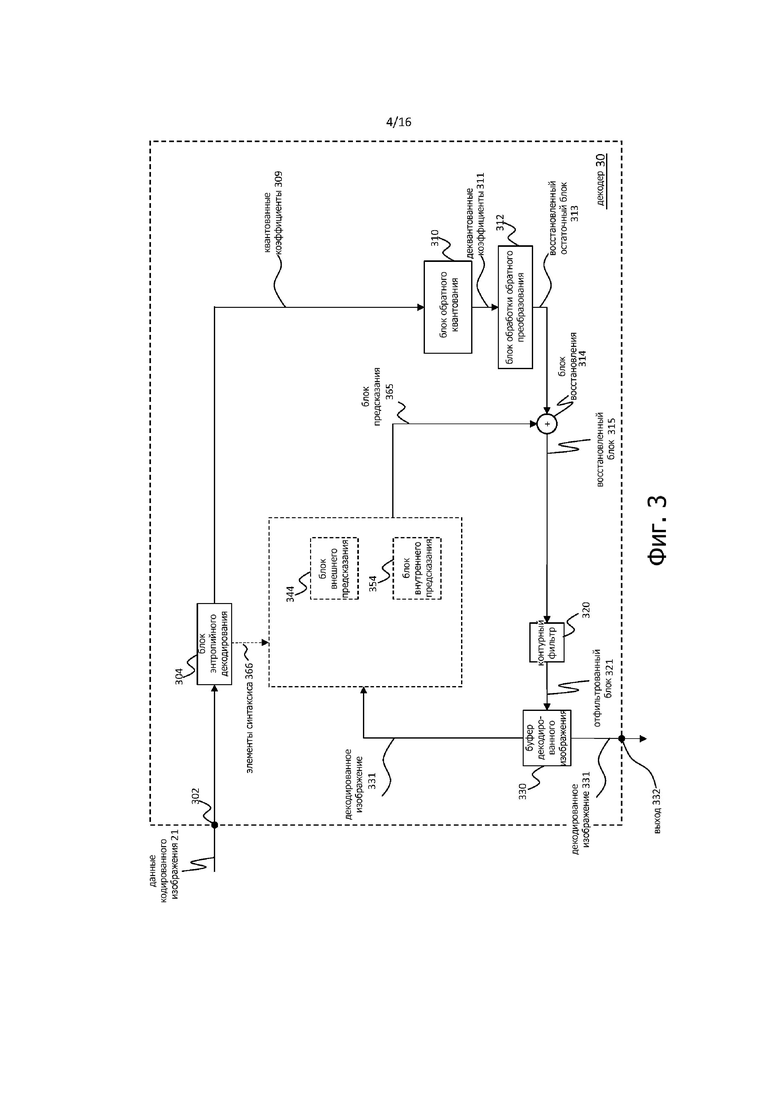
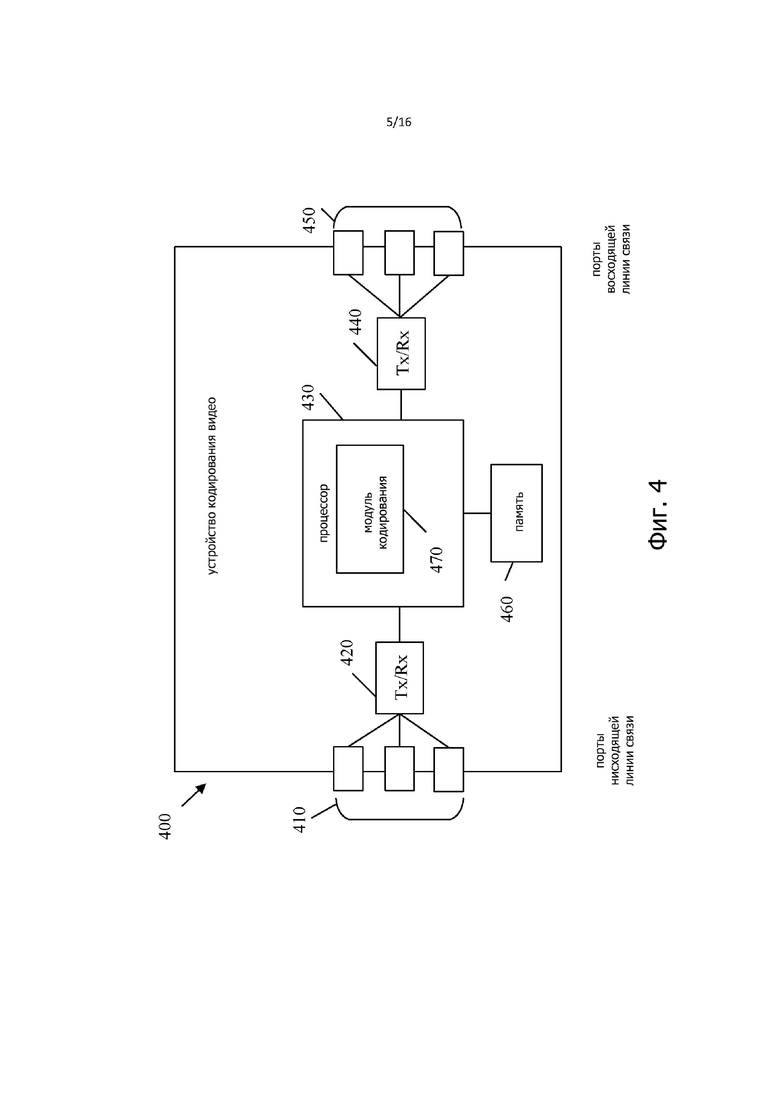
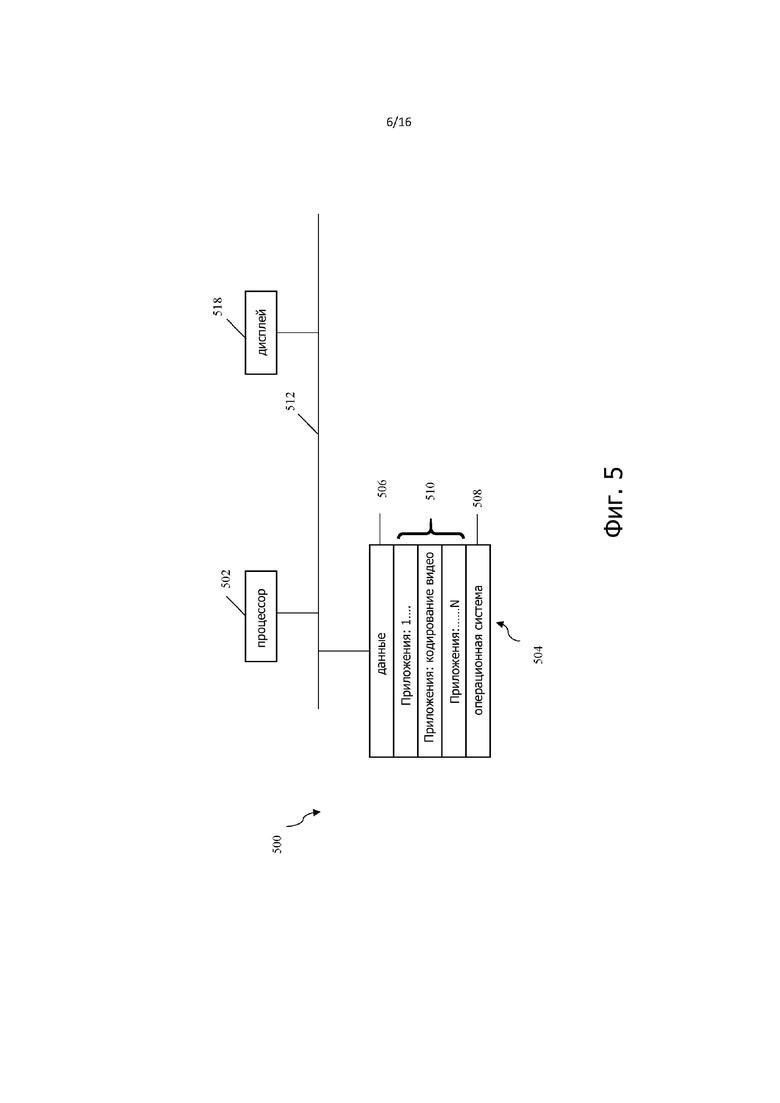
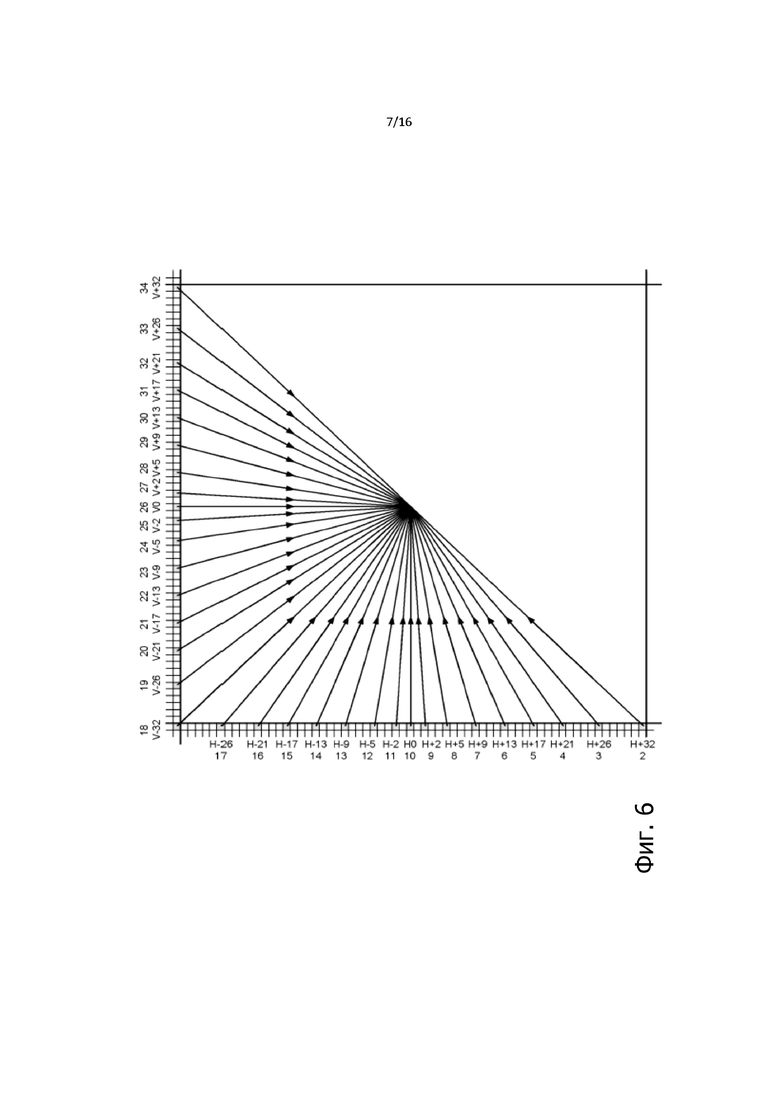
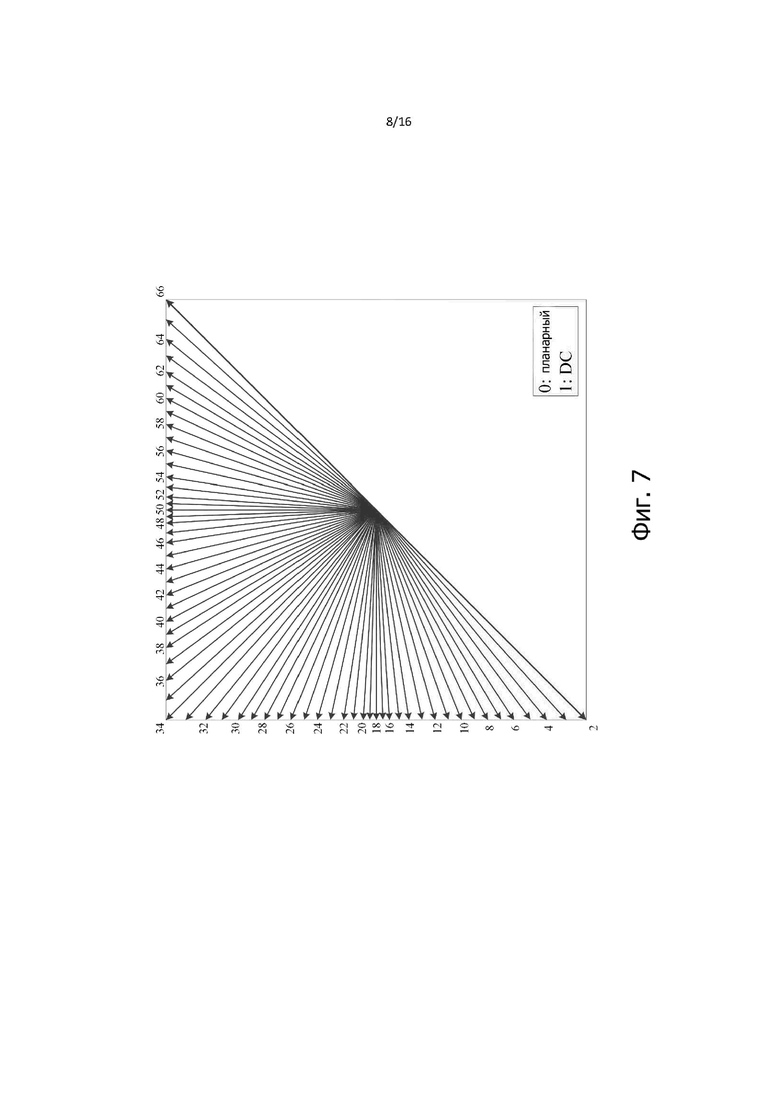
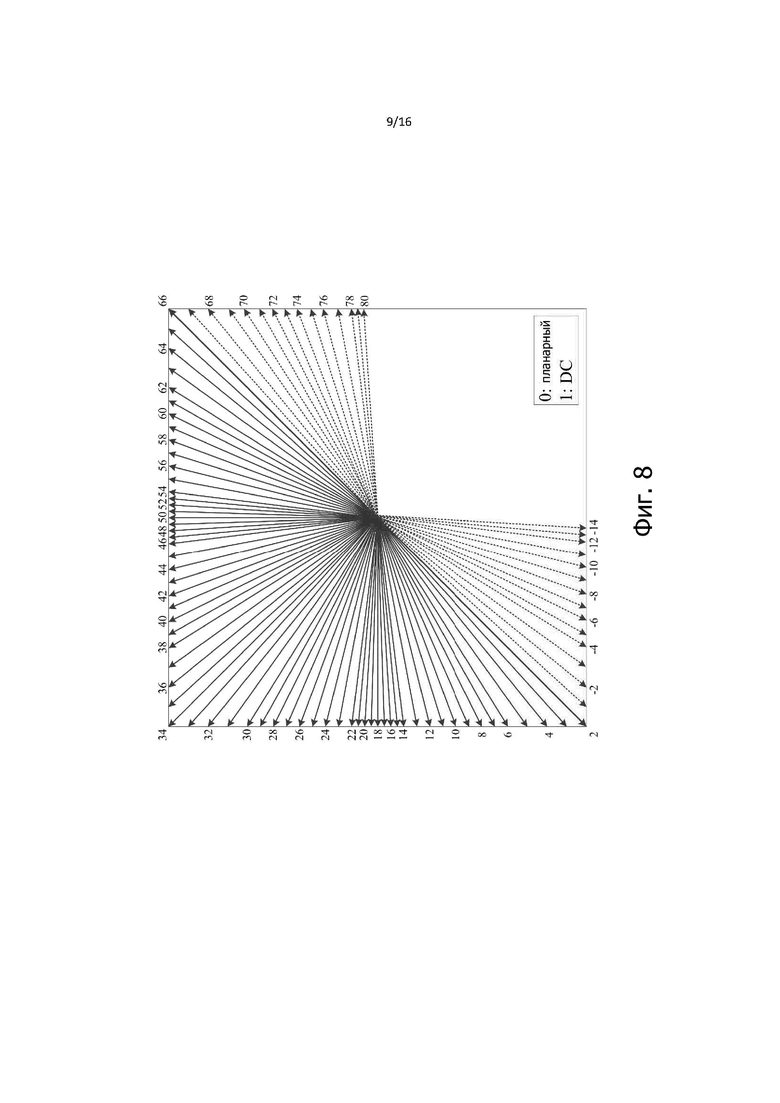
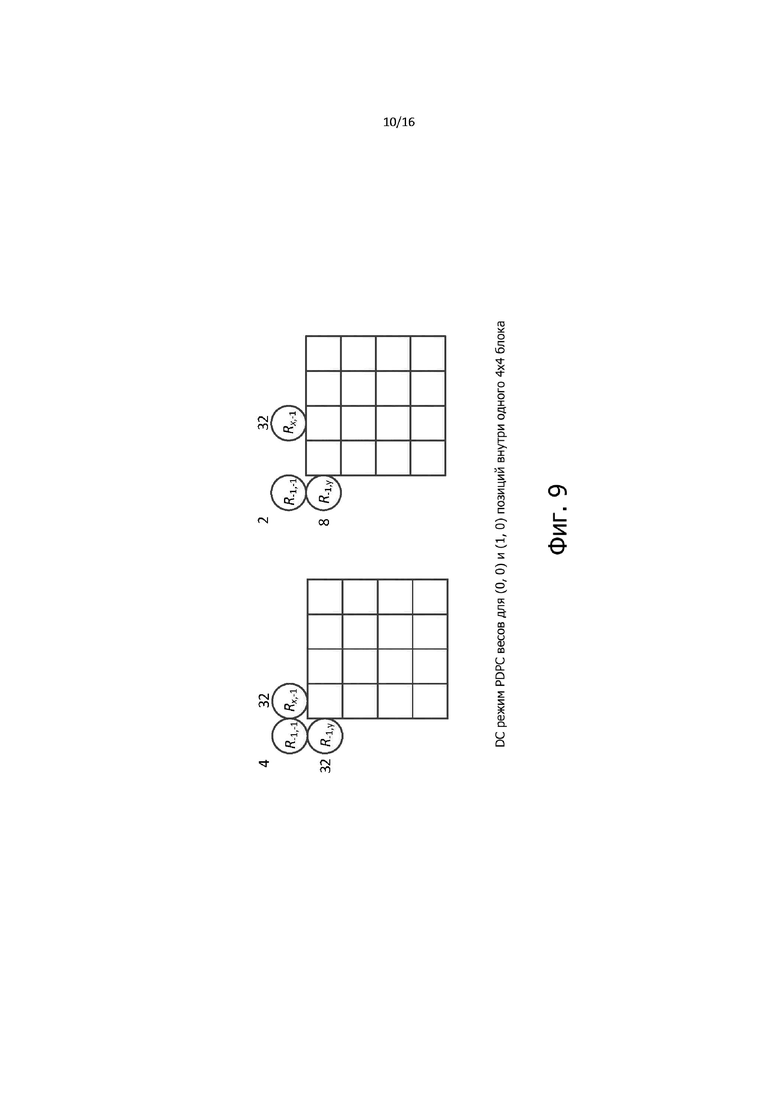
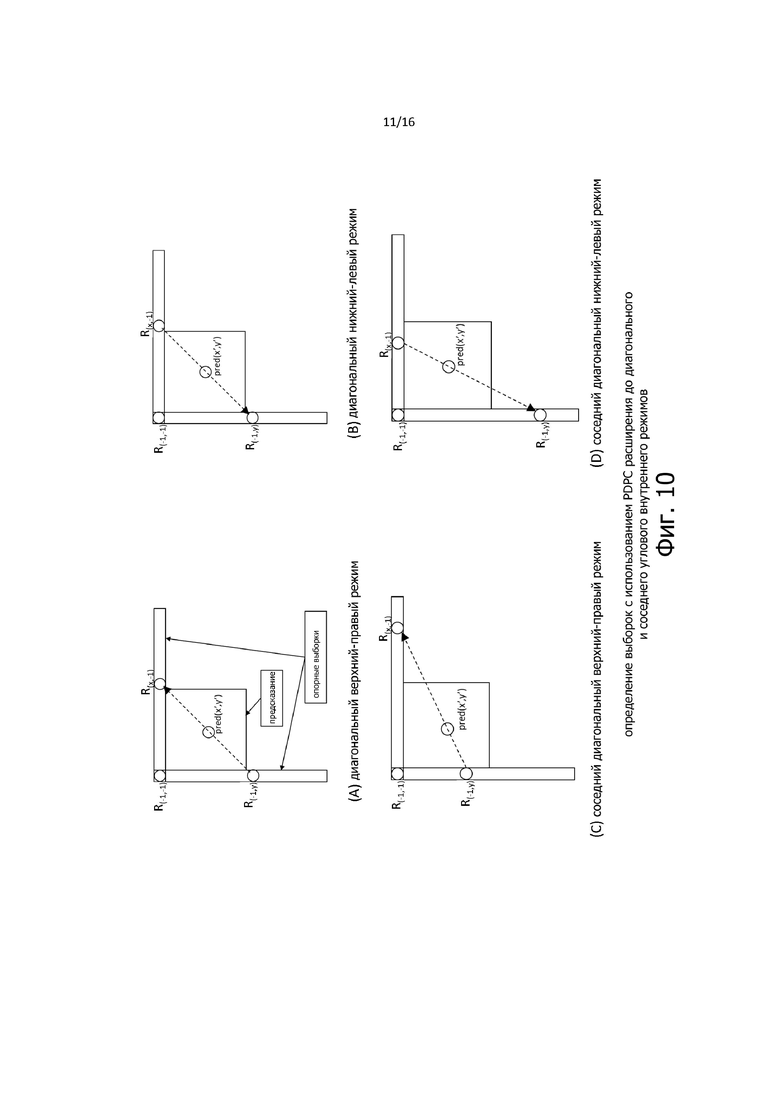
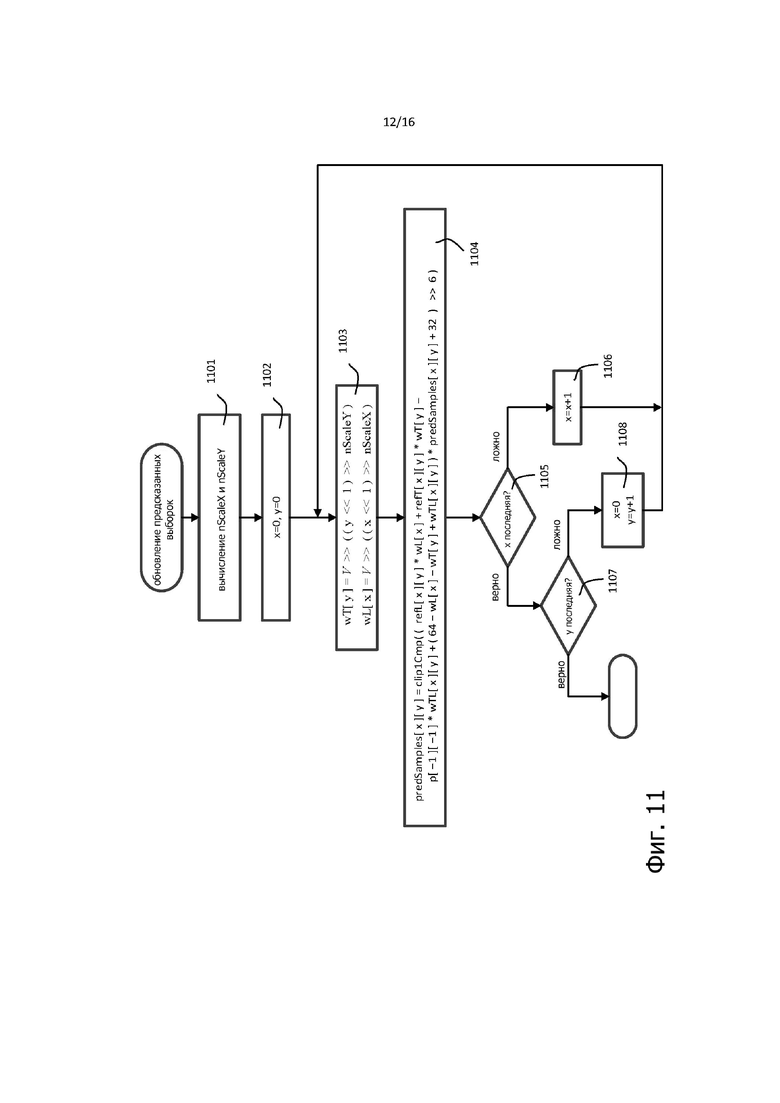
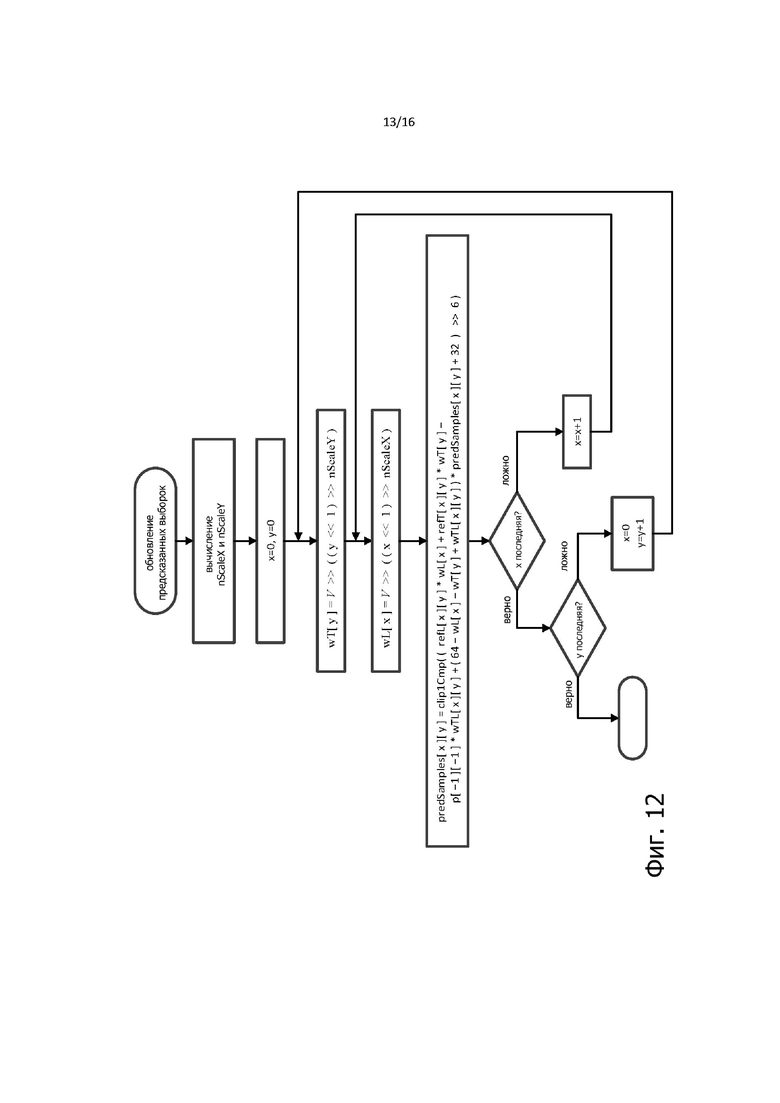
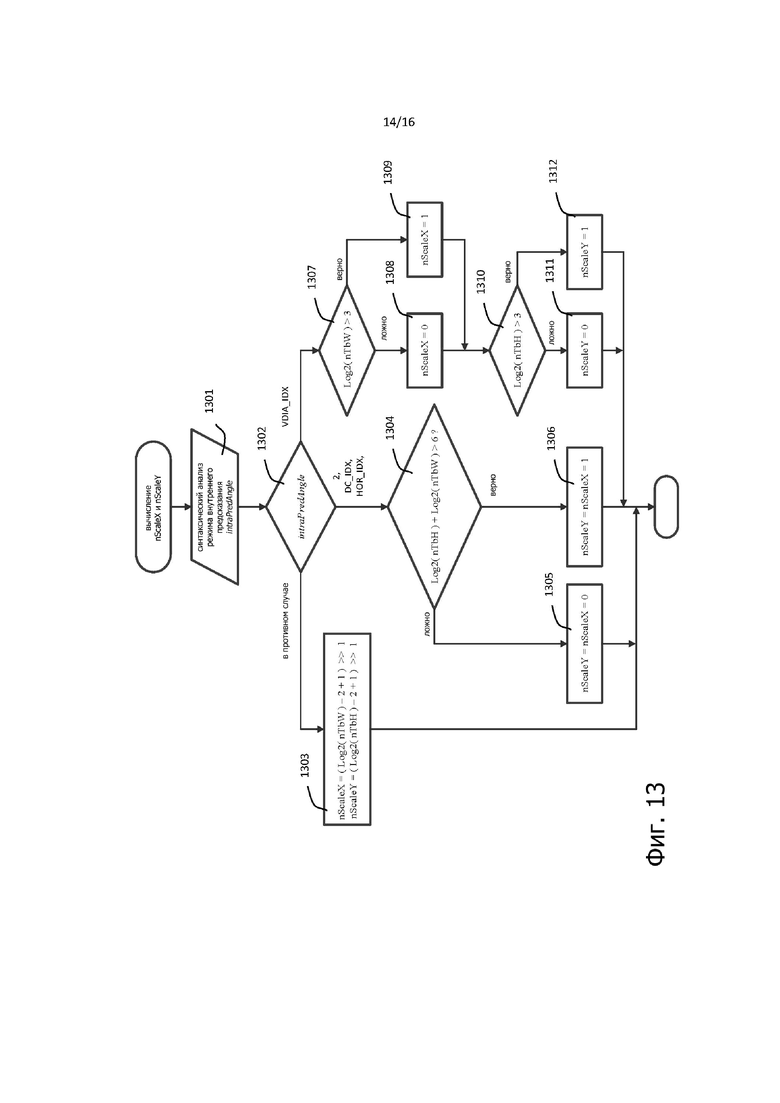
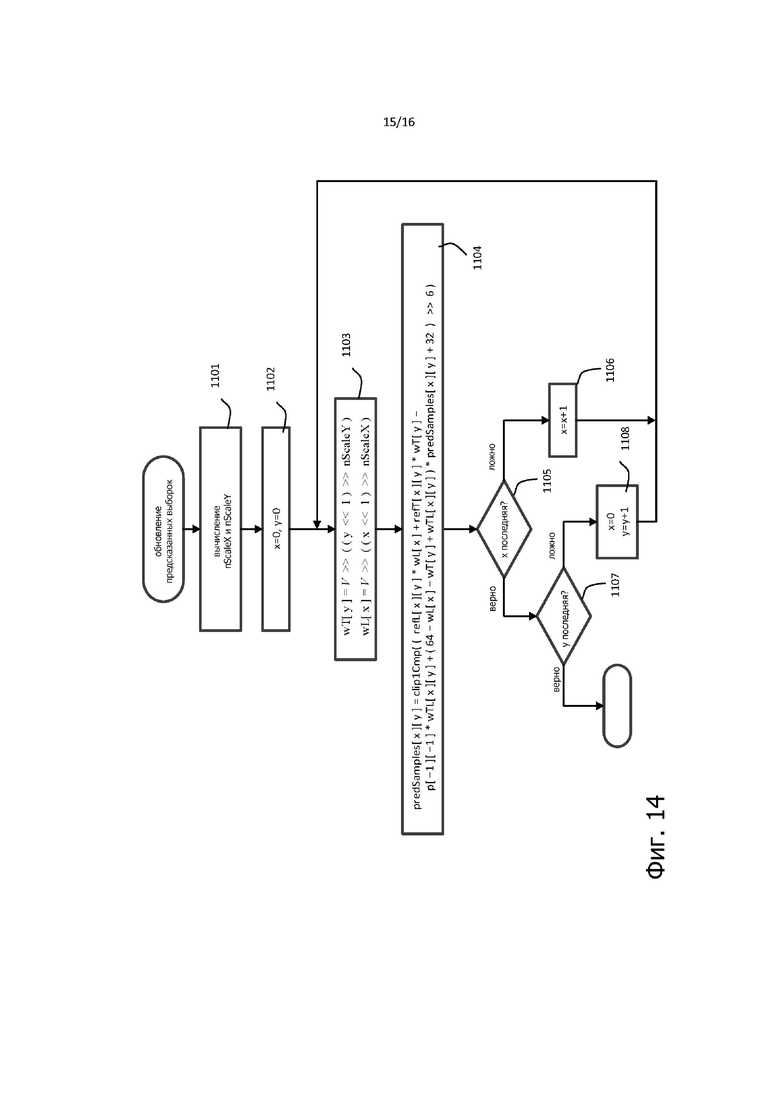
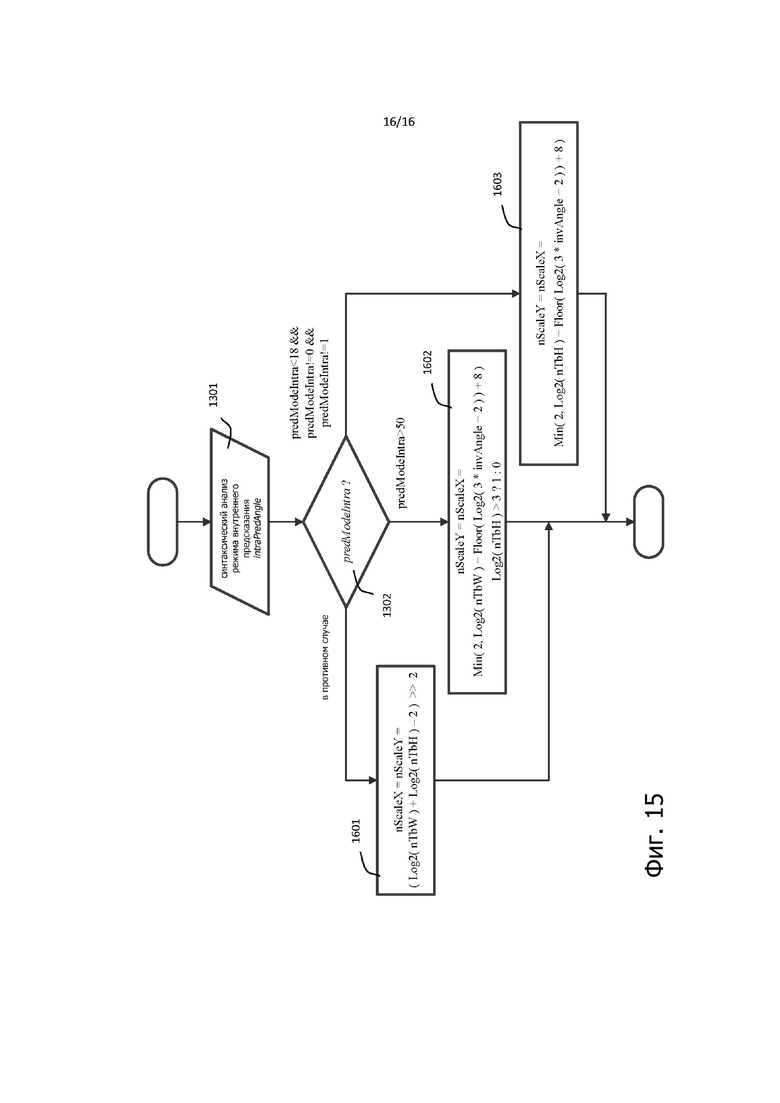
Изобретение относится к средствам для кодирования изображений. Технический результат заключается в повышении эффективности кодирования. Определяют значение предсказанной выборки из одного или более значений опорных выборок посредством внутреннего предсказания с использованием режима внутреннего предсказания, выбранного из DC режима внутреннего предсказания, планарного режима внутреннего предсказания и углового режима внутреннего предсказания. Определяют первый вес на основании режима внутреннего предсказания и одного из высоты блока, ширины блока или обоих. Определяют второй вес на основании режима внутреннего предсказания и одного из высоты блока, ширина блока или обоих. Вычисляют дополнительное значение в качестве взвешенной суммы значения верхней опорной выборки и значения левой опорной выборки посредством взвешивания значения верхней опорной выборки первым весом и значения левой опорной выборки вторым весом. Умножают значение предсказанной выборки на весовой коэффициент выборки для получения взвешенного значения предсказанной выборки. Добавляют дополнительное значение к взвешенному значению предсказанной выборки для получения ненормализованного модифицированного значения предсказанной выборки. 6 н. и 15 з.п. ф-лы, 16 ил., 18 табл.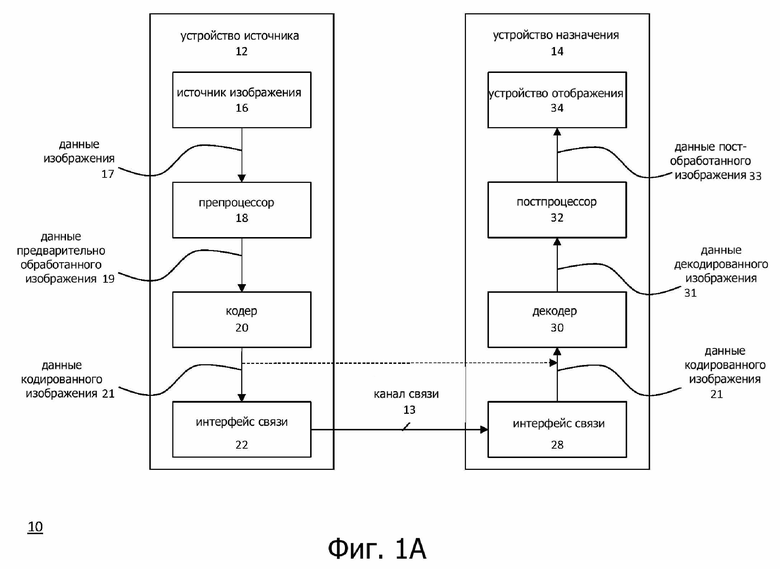
1. Способ внутреннего предсказания блока изображения, содержащий, для выборки из множества выборок блока, этапы, на которых:
определяют значение предсказанной выборки из одного или более значений опорных выборок посредством внутреннего предсказания с использованием режима внутреннего предсказания, выбранного из DC режима внутреннего предсказания, планарного режима внутреннего предсказания и углового режима внутреннего предсказания;
определяют первый вес на основании режима внутреннего предсказания и одного из высоты блока, ширины блока или обоих;
определяют второй вес на основании режима внутреннего предсказания и одного из высоты блока, ширины блока или обоих;
вычисляют дополнительные значения в качестве взвешенной суммы значения верхней опорной выборки и значения левой опорной выборки посредством взвешивания значения верхней опорной выборки первым весом и значения левой опорной выборки вторым весом;
умножают значение предсказанной выборки на весовой коэффициент выборки для получения взвешенного значения предсказанной выборки;
добавляют дополнительное значение к взвешенному значению предсказанной выборки для получения ненормализованного модифицированного значения предсказанной выборки; и
нормализируют ненормализованное модифицированное значение предсказанной выборки посредством арифметического правого сдвига целочисленного представления ненормализованного модифицированного значения предсказанной выборки для получения нормализованного модифицированного значения предсказанной выборки.
2. Способ по п. 1, дополнительно содержащий этап, на котором выполняют внутреннее предсказание блока изображения, содержащего каждую выборку из множества выборок блока.
3. Способ по п. 1 или 2, в котором
этап определения первого веса и определения второго веса содержит подэтап, на котором определяют коэффициент масштабирования на основании режима внутреннего предсказания и одного из высоты блока, ширины блока или обоих; причем первый вес и второй вес определяются на основании коэффициента масштабирования, соответственно.
4. Способ по любому из пп. 1-3, в котором
этап определения первого веса содержит подэтап, на котором определяют вертикальный коэффициент масштабирования, обозначенный, nScaleY, на основании высоты блока и режима внутреннего предсказания, при этом первый вес определяется на основании вертикального коэффициента масштабирования nScaleY;
этап определения второго веса содержит подэтап, на котором определяют горизонтальный коэффициент масштабирования, обозначенный, nScaleХ, на основании ширины блока и режима внутреннего предсказания, при этом второй вес определяется на основании горизонтального коэффициента масштабирования, nScaleХ; а
нормализация ненормализованного значения предсказанной выборки посредством арифметического правого сдвига целочисленного представления ненормализованного значения предсказанной выборки заключается в получении нормализованного значения предсказанной выборки.
5. Способ по п. 4, в котором nScaleХ и nScaleY получают в зависимости от индекса класса режима, соответственно, при этом индекс класса режима получают с использованием группы режимов внутреннего предсказания.
6. Способ по п. 5, в котором индекс класса режима отображается на конкретную группу режимов внутреннего предсказания в соответствии с одной из следующих таблиц:
DC_IDX, HOR_IDX,
или
или
или
-14 -12 -10 -6, 2, VDIA_IDX, 72, 76, 78, 80
где DC_IDX означает DC режим, имеющий индекс режима внутреннего предсказания 1, HOR_IDX и VER_IDX означают горизонтальный и вертикальный режимы, имеющие индексы режима внутреннего предсказания 18 и 50, соответственно, VDIA_IDX обозначает диагональный режим, имеющий индекс режима внутреннего предсказания 66.
7. Способ по п. 4, в котором nScaleХ и nScaleY получены в соответствии со следующим отображением:
nScaleY = (Log2(nTbH) – 2 + 1) >> 1
nScaleY = Log2(nTbH) > 3 ? 1 : 0
где nTbW и nTbH обозначают ширину и высоту предсказанного блока, соответственно, а «>>» обозначает операцию правого сдвига;
причем Floor является функцией округления до ближайшего целого в меньшую сторону, Log2 обозначает натуральный логарифм числа с основанием 2, Min является наименьшим из его аргументов и «>>» обозначает операцию правого сдвига.
8. Способ по п. 5, в котором индекс класса режима отображается на конкретную группу режимов внутреннего предсказания в соответствии со следующей таблицей:
predModeIntra!=0 && predModeIntra!=1
9. Способ по п. 8, в котором nScaleХ и nScaleY получают в соответствии со следующим отображением:
Min( 2, Log2(nTbH) − Floor(Log2(3 * invAngle − 2)) + 8)
Min( 2, Log2(nTbW) − Floor( Log2(3 * invAngle − 2)) + 8) Log2(nTbH) > 3 ? 1 : 0
где nTbW и nTbH обозначают ширину и высоту предсказанного блока, соответственно, и «>>» обозначает операцию правого сдвига;
причем Floor является функцией округления до ближайшего целого в меньшую сторону, Log2 обозначает натуральный логарифм числа с основанием 2, Min является наименьшим из его аргументов и «>>» обозначает операцию правого сдвига;
invAngle является параметром обратного угла, полученного с использованием intraPredAngle следующим образом:
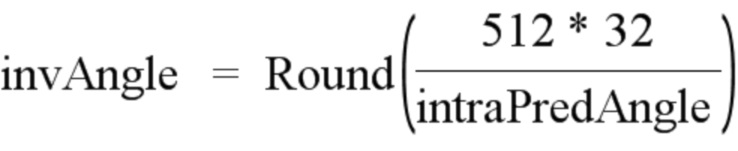 ;
;
где intraPredAngle является параметром угла, полученного из режима внутреннего предсказания, заданного переменной predModeIntra, с использованием таблицы поиска, LUT.
10. Способ по п. 8, в котором LUT задается следующей таблицей
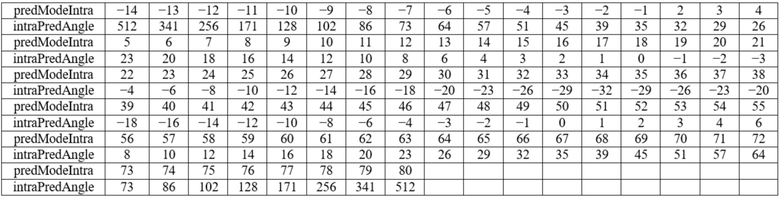
11. Способ по любому из пп. 4-10, в котором этап нормализации ненормализованного модифицированного значения предсказанной выборки содержит подэтап, на котором вычисляют значение предсказанной выборки, как
 ,
,
где
 является ненормированным модифицированным значением предсказанной выборки,
является ненормированным модифицированным значением предсказанной выборки,
Rx,-1, R-1,y представляют значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
wL = V >> ((x << 1) >> nScaleX) является горизонтальным весовым коэффициентом,
wT = V >> ((y << 1) >> nScaleY) является вертикальным весовым коэффициентом,
V является базовым значением;
x является горизонтальной координатой каждой выборки, и
у является вертикальной координатой выборки;
где сlip1Cmp устанавливается следующим образом:
в случае, если cIdx равен 0, сlip1Cmp устанавливается равным Clip1Y;
в противном случае сlip1Cmp устанавливается равным Clip1C;
причем cIdx является переменной, указывающей цветовой компонент текущего блока; и
Clip1Y(x) = Clip3(0, (1 << BitDepthY ) − 1, x)
Clip1C(x) = Clip3(0, (1 << BitDepthC ) − 1, x)
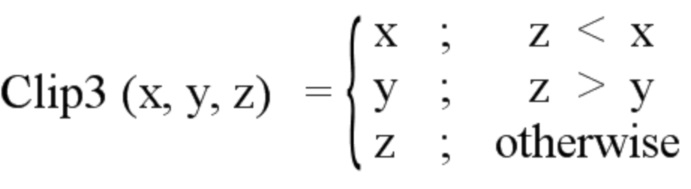
где BitDepthy является битовой глубиной выборок яркости,
где BitDepthc является битовой глубиной выборок цветности.
12. Способ по п. 11, в котором для планарного режима, wTL = 0, для горизонтального режима wTL = wT, а для вертикального режима wTL = wL.
13. Способ по любому из пп. 4-10, в котором нормализация ненормализованного модифицированного значения предсказанной выборки содержит вычисление нормализованного модифицированного значения предсказанной выборки, как
 ,
,
где
 является нормализованным модифицированным значением предсказанной выборки,
является нормализованным модифицированным значением предсказанной выборки,
является ненормированным модифицированным значением предсказанной выборки,
Rx,-1, R-1,y представляют значения ближайших опорных выборок, расположенных выше и слева от каждой выборки,
wL = V >> ((x << 1) >> nScaleX) является горизонтальным весовым коэффициентом,
wT = V >> ((y << 1) >> nScaleY) является вертикальным весовым коэффициентом,
V является базовым значением;
x является горизонтальной координатой каждой выборки, и
у является вертикальной координатой выборки.
14. Способ по любому из пп. 1-13, в котором каждая выборка не обновляется,
если сумма ширины блока и высоты блока, заданная в выборках, соответственно, составляет более 64 выборок, и
либо режим внутреннего предсказания является несимметричным недиагональным, либо режим внутреннего предсказания является планарным режимом внутреннего предсказания.
15. Способ по п. 14, в котором intraPredMode является несимметричным недиагональным, если intraPredMode не равно 2, или VDIA_IDX и одно из следующего является верным: intraPredMode не менее чем VDIA_IDX – numModes или intraPredMode не превышает 2 + numModes.
16. Способ по любому из пп. 1-15, дополнительно содержащий этап, на котором
добавляют остаточное значение в нормализованное модифицированное значение предсказанной выборки для получения значения восстановленной выборки.
17. Кодер (20), содержащий схему обработки для выполнения способа по любому из пп. 1-16.
18. Декодер (30), содержащий схему обработки для выполнения способа по любому из пп. 1-16.
19. Машиночитаемый носитель информации, хранящий программный код, вызывающий выполнение способа по любому из пп. 1-16.
20. Декодер, содержащий:
один или более процессоров; и
постоянный машиночитаемый носитель, соединенный с процессорами и хранящий программы для выполнения процессорами, причем программы, при выполнении процессорами, вызывают выполнение декодером способа по любому из пп. 1-16.
21. Кодер, содержащий:
один или более процессоров; и
постоянный машиночитаемый носитель, соединенный с процессорами и хранящий программы для выполнения процессорами, причем программы, при выполнении процессорами, вызывают выполнение кодером способа по любому из пп. 1-16.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 8503536 B2, 06.08.2013 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

