Изобретение относится к космической технике и может быть использовано для отделения малых космических аппаратов (МКА) от средства выведения (СВ) в процессе эксплуатации, а также для отработки процессов отделения МКА.
Отделение полезной нагрузки от СВ является одной из типичных задач в космической отрасли. На сегодняшний день существует множество отработанных способов отделения полноразмерных космических аппаратов (КА) от СВ. В последнее время стремительно развивается направление МКА, нижний предел массы которых практически отсутствует. В качестве примера можно привести спутники формата «Chipsat», масса которых составляет единицы граммов. И в связи с появлением новых форматов МКА вновь встаёт проблема отделения от СВ.
МКА вследствие своих малых размеров обладают ограниченными возможностями ориентации и стабилизации, коррекции орбиты, и могут вовсе не оснащаться соответствующими системами. Поэтому, если параметры движения МКА оказывают влияние на выполнение целевой задачи, высокие требования предъявляются к системе отделения (СО) МКА, в частности:
- СО должна обеспечивать скорость МКА после отделения с заданной точностью;
- угловые скорости МКА после отделения должны иметь минимальное значение;
- СО должна иметь простую конструкцию, быть проста в эксплуатации, что имеет особое значение при выведении одним СВ множества МКА.
Известен способ отделения полезной нагрузки с учётом энергии пружинного толкателя, патент РФ 2640498. Данный способ заключается в размещении большого количества пружинных толкателей на устройстве отделения таким образом, чтобы отклонения параметров пружин от номинальных значений компенсировались их взаимным расположением. Для этого перед установкой пружин в состав системы отделения выполняется замер их рабочих характеристик и расчёт положения пружинных толкателей относительно центра масс КА и друг друга. Способ хорошо зарекомендовал себя для отделения полноразмерных КА. Применение способа в масштабе МКА затруднительно, поскольку рассмотренная СО требует наличия большого количества толкателей и пространства для их размещения, что нецелесообразно в случае МКА. Кроме того, моменты инерции МКА могут иметь величины порядка 0,01 кг⋅м2. В таком случае, кинетическая энергия вращательного движения при угловой скорости 10 °/с составит 0,00175 Дж. Следовательно, при отборе пружин потребуется определять запасаемую энергию с точностью порядка 0,0001…0,001 Дж, что трудно осуществимо на практике.
Также известно устройство управляемого запуска наноспутников и микроспутников, патент РФ 2551408. Устройство снабжено электромагнитным толкателем, придающим МКА заданную линейную скорость. Для обеспечения работы электромагнитного толкателя задействуется сложная система управления и накопители энергии в виде конденсаторов. В конструкции устройства не описаны решения, обеспечивающие низкие угловые скорости МКА после отделения.
В качестве прототипа заявленного изобретения выбран толкатель системы отделения, выполненной в виде транспортно-пускового контейнера для спутников формата Cubesat, описанный в патенте US 2014/0319283 A1. До момента отделения МКА находится в защитном контейнере, снабжённом двумя направляющими, откидной крышкой, пружинным толкателем и системами зачековки крышки, МКА и толкателя. МКА имеет подготовленные рёбра, находящиеся в контакте с направляющими контейнера. В процессе отделения открывается и фиксируется в открытом положении крышка контейнера, затем пружинный толкатель воздействует на МКА. Последний выходит из контейнера, при этом его рёбра скользят по направляющим контейнера.
К положительным качествам такой системы отделения можно отнести защиту МКА от механических и атмосферных воздействий, унификацию размеров МКА и пусковых контейнеров, возможность изготовления системы из немагнитных материалов.
К недостаткам системы можно отнести:
- высокую массу системы, которая может достигать 150% от массы МКА;
- ограничение на форму МКА: даже при изменении размеров пускового контейнера и отходе от стандартов Cubesat, МКА должен иметь призматическую форму;
- использование пружины с длинным ходом, склонной к потере устойчивости;
- принципиальную необходимость наличия зазоров между направляющими и рёбрами МКА, что приводит к соударениям в процессе отделения МКА и ухудшению параметров отделения, в частности, к появлению трудно предсказуемой угловой скорости МКА;
- длинный участок взаимодействия с направляющими, из-за чего предъявляются высокие требования к параллельности, прямолинейности и качеству поверхности, как направляющих, так и рёбер МКА.
Для заявленного изобретения выявлены следующие общие с прототипом существенные признаки: толкатель системы отделения малых космических аппаратов, содержащий основание, две цилиндрические направляющие, параллельные друг другу и направлению отделения, пружинный толкатель, обеспечивающий требуемую скорость отделения.
Техническими проблемами, решаемыми заявленным изобретением, являются:
- отделение МКА от носителя с минимально возможными угловыми скоростями;
- обеспечение заданной скорости отделения;
- уменьшение массы и габаритов толкателя СО;
- упрощение конструкции толкателя СО.
Поставленные технические проблемы решаются тем, что отделяемый МКА опирается на платформу в составе толкателя системы отделения (ТСО), которая под воздействием пружины движется по коротким жёстким цилиндрическим направляющим, при этом поверхности скольжения платформы постоянно прижаты к цилиндрической поверхности основной направляющей, поскольку в процессе отделения на платформу воздействует неизменный по направлению вращающий момент. Благодаря этому обеспечивается отсутствие зазоров между основной направляющей и платформой. Дополнительная направляющая проходит через паз в платформе и ограничивает вращение платформы вокруг основной направляющей.
В конце рабочего хода платформа останавливается под воздействием упора. Упор расположен таким образом, что в результате взаимодействия с ним на платформу действует вращающий момент в том же направлении, что и в процессе разделения. Таким образом, исключается вращательное движение платформы в процессе её торможения, в первые моменты которого она может контактировать с отделяемым МКА. После остановки платформы МКА теряет контакт с ней и продолжает движение с заданными параметрами отделения.
Благодаря конфигурации поверхностей скольжения платформа контактирует с основной направляющей в четырёх точках, благодаря чему смещение центра масс МКА от плоскости симметрии ТСО в некоторых пределах не оказывает значительного влияния на характер движения платформы, равно как и смещение оси пружины относительно плоскости симметрии.
Решающее значение для минимизации угловых скоростей МКА имеет жёсткость элементов системы, в особенности платформы, основной направляющей и основания, на котором установлена направляющая. Компактность системы и короткий рабочий ход платформы способствуют удовлетворению данного требования.
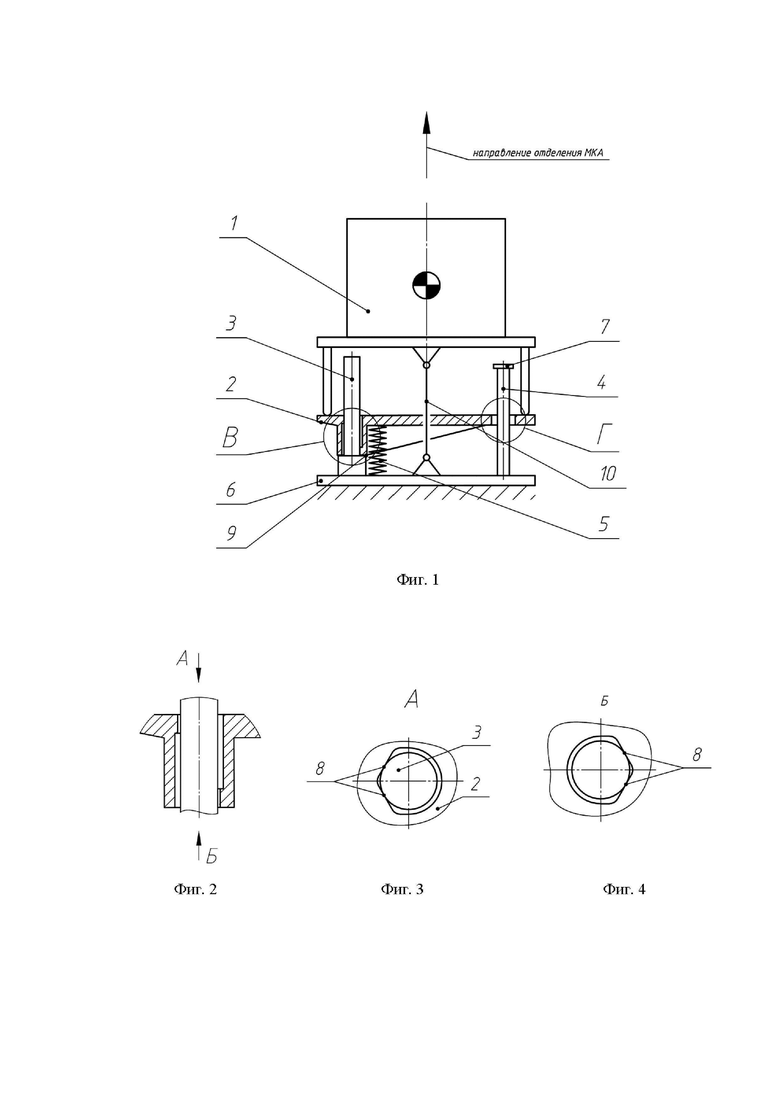
Конструкция ТСО показана:
- на фиг. 1 - компоновка толкателя;
- на фиг. 2, 3, 4 - точки контакта платформы и основной направляющей;
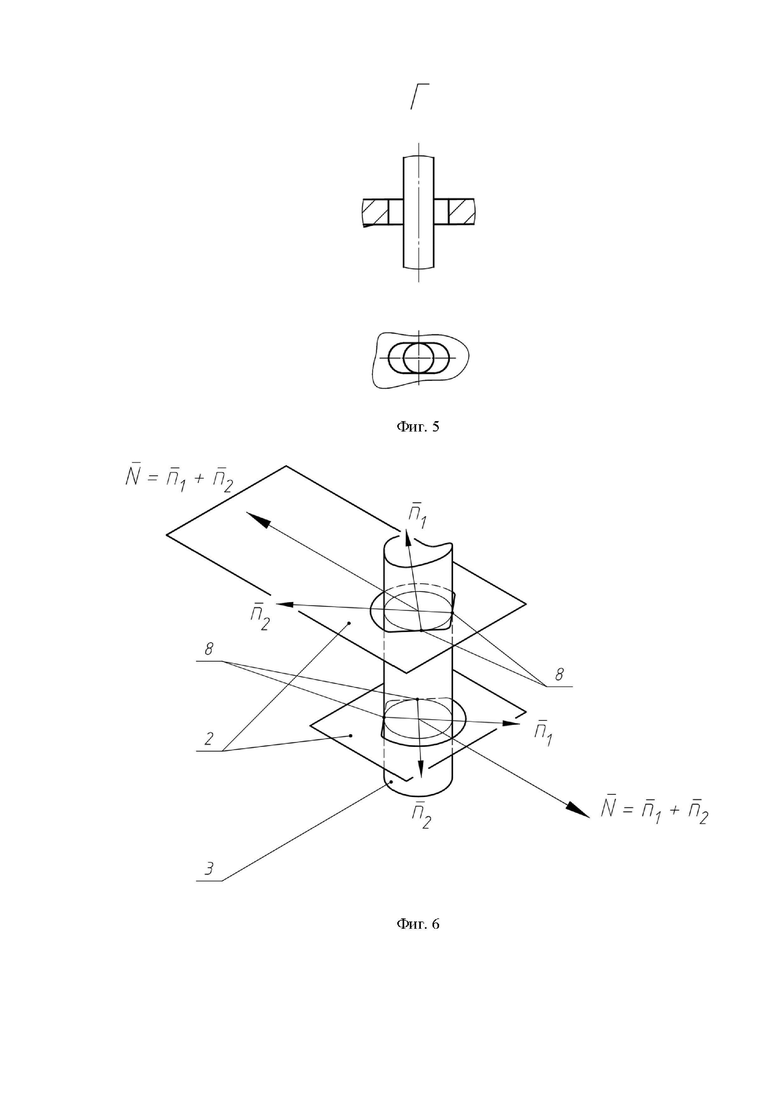
- на фиг. 5 - паз в платформе и дополнительная направляющая;
- на фиг. 6 - схематично расположение точек контакта платформы и основной направляющей, направление сил в точках контакта;
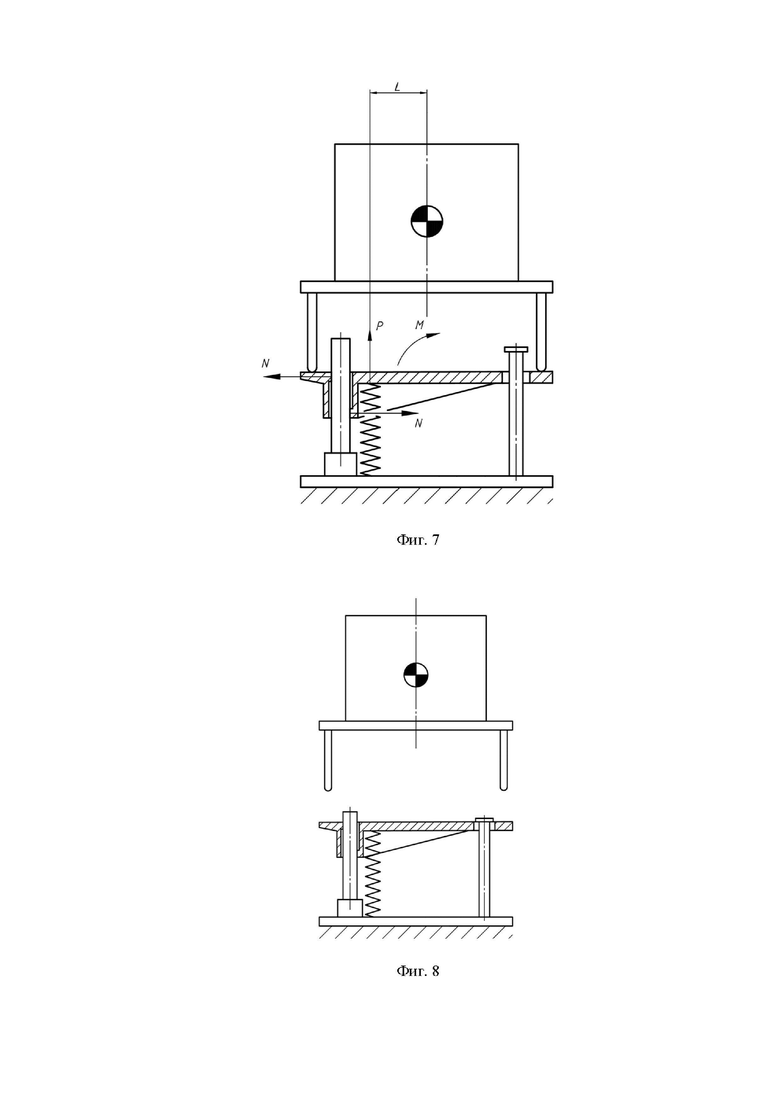
- на фиг. 7 - вид толкателя в процессе отделения, действующие на платформу в процессе отделения нагрузки;
- на фиг. 8 - вид толкателя по окончании процесса отделения.
ТСО состоит из платформы 2, на которую опирается МКА 1, цилиндрических основной 3 и дополнительной 4 направляющих, закреплённых на основании 6. Усилие, требуемое для ускорения платформы, создаётся пружиной сжатия 5, одним концом упирающуюся в основание 6, другим в платформу 2. Ось пружины расположена между основной направляющей 3 и центром масс МКА 1. Основание 6 закрепляется на средстве выведения. Дополнительная направляющая 4 проходит через паз (вид Г фиг.5) в платформе 2 и оснащена упором 7, ограничивающим движение платформы и её сход с направляющих.
Возможно вместо одной пружины 5 устанавливать две или более пружин при условии, что равнодействующая усилий пружин расположена между основной направляющей и центром масс МКА.
На дополнительных видах А и Б фиг. 1 показано расположение поверхностей скольжения, отмечены четыре точки контакта 8 платформы 2 и основной направляющей 3.
Принцип работы толкателя заключается в следующем. В исходном состоянии МКА 1 удерживается неподвижно относительно основания 6 фиксирующим устройством 10 (на фиг. 1 условно показано в виде связи между МКА и основанием ТСО; фиксирующее устройство не является частью ТСО). При этом МКА прижат к платформе 2, пружина 5 сжата. Платформа 2 прижата к бурту 9 основной направляющей 3. В момент начала разделения фиксирующее устройство 10 разрушает механическую связь между МКА 1 и основанием толкателя 6. Под воздействием пружины 5 платформа начинает движение вдоль направляющих. При этом со стороны пружины на платформу действует момент M (см. фиг. 2), равный:

где: P - усилие пружины;
L - расстояние от линии действия силы до центра масс МКА.
Момент М уравновешивается действием пары сил N, действующей в точках контакта платформы и основной направляющей (см. фиг. 6). За счёт этого платформа находится в постоянном контакте с направляющей, при этом точки контакта не изменяют своего положения относительно платформы при условии постоянства сечения основной направляющей. Таким образом, при соблюдении условия прямолинейности направляющей, платформа в любой момент времени параллельна исходному положению и совершает прямолинейное движение, если пренебречь упругими деформациями системы.
В конце хода платформа контактирует с упором 7. Расположение упора относительно пружин и центра масс самой платформы выбрано таким образом, чтобы возникающий при торможении платформы момент M1 был направлен в ту же сторону, что и момент M. Таким образом, при торможении будет сохраняться контакт платформы и основной направляющей, и МКА практически мгновенно теряет контакт с платформой во всех точках соприкосновения. В этот момент процесс отделения завершается, и МКА продолжает движение с приобретённой скоростью в заданном направлении.
Толкатель не подвержен заклиниванию в паре трения «платформа - основная направляющая», поскольку любое уменьшение ускорения платформы в результате увеличения силы трения Fтр в данной паре приводит к падению момента M, вслед за чем падают силы n1, n2 и, соответственно, сила трения Fтр. При испытаниях было проведено 100 срабатываний макета толкателя СО, в т.ч. при смещении центра масс имитатора МКА относительно номинального положения. Во всех случаях макет толкателя СО работал штатно. Тем не менее, наличие значительных по величине сил трения:
- вызывает необходимость применения пружин с запасом энергии на преодоление сил трения;
- ухудшает точность, с которой обеспечивается требуемая линейная скорость отделения;
- приводит к возникновению дополнительных вращающих моментов, действующих на платформу, при движении точек контакта по участкам направляющей с различающимся качеством поверхности.
Влияние перечисленных негативных эффектов может быть снижено путём уменьшения сил трения, например, вводом вкладышей между платформой и основной направляющей. Вкладыши должны быть выполнены из антифрикционных материалов либо иметь антифрикционное покрытие. Также возможна установка роликов на платформу, через которые будет осуществляться контакт с направляющей.
Таким образом, техническими результатами заявленного устройства являются надёжное отделение МКА от средства выведения с заданными параметрами отделения, а также простота конструкции и малые габариты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР | 2017 |
|
RU2658401C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ УСТРОЙСТВ ОТДЕЛЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2489331C1 |
| ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР | 2016 |
|
RU2631360C1 |
| СПОСОБ ВЫВОДА ПОЛЕЗНОГО ГРУЗА В ОКОЛОЗЕМНОЕ ПРОСТРАНСТВО С ИСПОЛЬЗОВАНИЕМ АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА И АВИАЦИОННЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2265558C1 |
| КОСМИЧЕСКИЙ ПОСАДОЧНЫЙ АППАРАТ | 2014 |
|
RU2584552C1 |
| УСТРОЙСТВО ВЫВЕДЕНИЯ ВРАЩАТЕЛЬНОГО ТИПА | 2022 |
|
RU2807447C1 |
| Транспортно-пусковой контейнер для спутников стандарта CubeSat | 2023 |
|
RU2819744C1 |
| УЗЕЛ КРЫШКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА | 2016 |
|
RU2620630C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2396190C1 |
| УНИВЕРСАЛЬНЫЙ БОКСОВЫЙ КОНВЕЙЕР | 2016 |
|
RU2643893C2 |
Изобретение относится к космической технике, а более конкретно к системам отделения. Толкатель системы отделения малых космических аппаратов содержит основание, две цилиндрические направляющие, параллельные друг другу и направлению отделения. Кроме того, он содержит платформу, имеющую возможность скольжения по цилиндрическим направляющим, по меньшей мере, одну пружину сжатия. Пружина одним концом упирается в основание, другим в платформу. Одна из направляющих проходит через паз в платформе и оснащена упором, а другая контактирует с платформой в четырёх точках. Достигается повышение надежности. 2 з.п. ф-лы, 5 ил.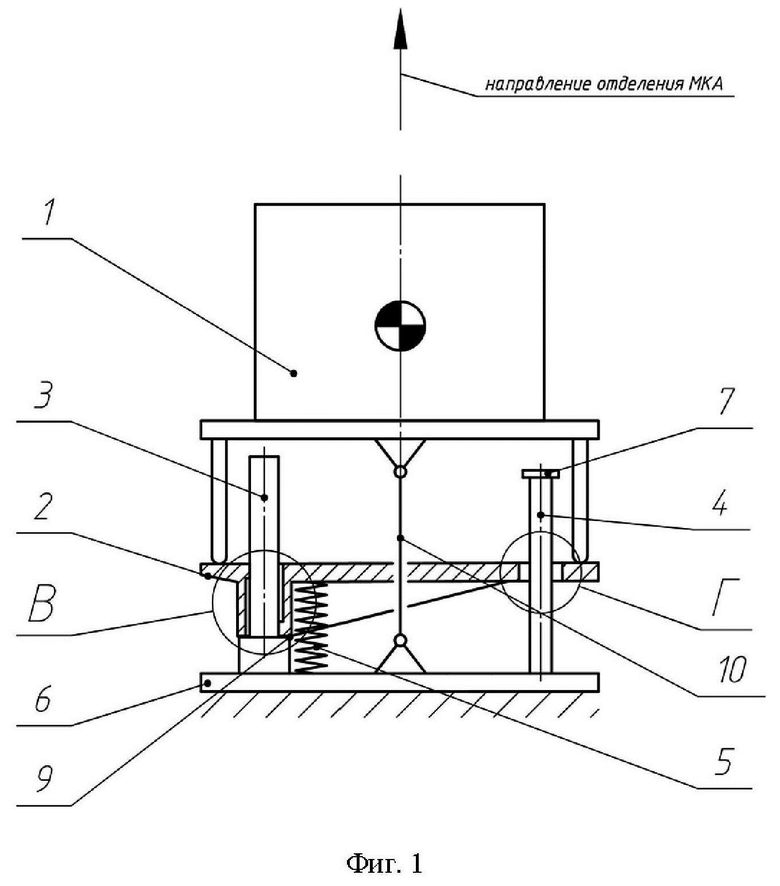
1. Толкатель системы отделения малых космических аппаратов, содержащий основание, две цилиндрические направляющие, параллельные друг другу и направлению отделения, отличающийся тем, что содержит платформу, имеющую возможность скольжения по цилиндрическим направляющим, по меньшей мере, одну пружину сжатия, одним концом упирающуюся в основание, другим в платформу, причем одна из направляющих проходит через паз в платформе и оснащена упором, а другая контактирует с платформой в четырёх точках.
2. Толкатель по п. 1, отличающийся тем, что контакт платформы и направляющей в четырёх точках происходит через антифрикционные вкладыши.
3. Толкатель по п. 1, отличающийся тем, что контакт платформы и направляющей в четырёх точках осуществляется через ролики, оси вращения которых закреплены на платформе.
| СПОСОБ ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ С УЧЕТОМ ЭНЕРГИИ ПРУЖИННОГО ТОЛКАТЕЛЯ | 2016 |
|
RU2640498C2 |
| УСТРОЙСТВО ДЛЯ РАЗМЕЩЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА РАКЕТЕ-НОСИТЕЛЕ | 1995 |
|
RU2156212C2 |
| US 9415883 B2, 16.08.2016. | |||

