Изобретение относится к космической технике, а именно - к средствам для отделения полезной нагрузки от космического аппарата.
Известна система по патенту Российской Федерации №2293694 [1] (опубл. 20.02.2007), позволяющая отделять полезную нагрузку от носителя (космического аппарата). Эта система сообщает отделяемой полезной нагрузке только линейную скорость. Однако известно, что тело, находящееся в свободном движении, сохраняет устойчивость своего пространственного положения, если вращается вокруг оси, совпадающей с главной центральной осью минимального или максимального момента инерции (В.И.Попов. Системы ориентации и стабилизации космических аппаратов. Москва, "Машиностроение", 1986 [2], с.34-41). Поэтому полезная нагрузка после отделения ее от носителя с помощью системы, известной из патента [1], не обладает необходимой устойчивостью своего положения.
Известна также система по патенту Российской Федерации №2276046 [3] (опубл. 10.05.2006), позволяющая производить отделение полезной нагрузки с вращением. Недостатком данной системы является обеспечение направления вектора скорости вращения отделяемой полезной нагрузки перпендикулярно вектору линейной скорости, что в ряде случаев неприемлемо по условиям полета.
От указанных недостатков свободна система по патенту США №4,067,308 [4] (опубл. 10.06.1978). Эта система содержит корпус с основанием, предназначенным для крепления к носителю (космическому аппарату). Внутри корпуса на указанном основании установлен полый неподвижный вал. Кроме того, внутри корпуса размещен плунжер в виде трубы, жестко соединенной одной из своих торцевых частей с диском, имеющим центральное отверстие, соосное с трубой. Труба плунжера установлена с внешней стороны полого вала с возможностью перемещения вдоль него и вращения вокруг него. Источником движения плунжера является пружина сжатия, окружающая трубу плунжера и опирающаяся одним концом на основание, а другим - на гайку, установленную с возможностью перемещения по резьбе на наружной стороне трубы плунжера и служащую для регулирования усилия сжатия пружины. С трубой плунжера связана также ось подшипника, размещенного в спиральном пазе, выполненном в боковой стенке корпуса.
Полезная нагрузка устанавливается на диске плунжера. В транспортном положении плунжер и установленная на нем полезная нагрузка зафиксированы от перемещения средством стопорения в виде надрезанного болта, соединяющего полезную нагрузку с неподвижным валом, для чего в полости вала имеется поперечная перегородка с отверстием для стержня указанного болта, на конце которого установлена разрывная гайка. По команде на начало отделения эта гайка срабатывает, и начинается движение плунжера под действием предварительно сжатой пружины. При этом благодаря наличию упомянутого подшипника одновременно с поступательным перемещением плунжера происходит его закрутка вследствие движения подшипника по спиральному пазу в стенке корпуса.
В системе предусмотрено регулирование скорости отделения, осуществляемое изменением положения упомянутой гайки, которое определяет усилие сжатия пружины, а также изменением размера элемента, ограничивающего ход плунжера.
Известная система отделения, описанная в патенте [4], наиболее близка к предлагаемой.
Недостатком этой известной системы является то, что линейная и угловая скорости отделяемой полезной нагрузки оказываются связанными, т.е. невозможно изменить одну из них, не изменяя другую. Это вызвано использованием общего пружинного источника движения и общих средств регулирования линейной и угловой скоростей отделения в виде упомянутой гайки для изменения усилия сжатия пружины и ограничителя хода плунжера. Изменение силы сжатия пружины и (или) хода плунжера влияет как на величину приобретаемой плунжером скорости поступательного движения, так и на величину сообщаемой плунжеру угловой скорости, поскольку пропорционально изменению скорости поступательного движения плунжера изменяется скорость движения подшипника по спиральному пазу, обеспечивающему закрутку плунжера. Недостатком системы является также то, что раздельное изменение линейной и угловой скоростей с помощью одних лишь имеющихся средств регулирования, т.е. без замены элементов системы другими, обладающими иными конструктивными параметрами (например, иным углом подъема спирального паза), вообще невозможно.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в исключении взаимосвязи линейной и угловой скоростей отделения полезной нагрузки и обеспечении возможности их регулирования независимо одна от другой и без изменения конструктивных параметров элементов системы, т.е. путем использования только имеющихся в системе средств регулирования. Ниже при раскрытии сущности изобретения и частных случаев выполнения предлагаемой системы отделения, а также при рассмотрении ее конкретной реализации и работы будут названы и другие виды достигаемого технического результата.
Предлагаемая система отделения полезной нагрузки от космического аппарата с сообщением ей вращательного движения, вектор скорости которого совпадает с направлением вектора скорости поступательного движения при отделении, как и указанная выше наиболее близкая к ней известная система, содержит основание, предназначенное для соединения с конструкцией космического аппарата, и плунжер в виде трубы, жестко соединенной одной из ее торцевых частей с диском, имеющим соосное с трубой центральное отверстие, а также вал, размещенный внутри трубы плунжера. На основании установлено пружинное средство для сообщения поступательного движения плунжеру, снабженное средством регулирования линейной скорости отделения путем изменения усилия предварительного сжатия указанного пружинного средства. Система содержит также управляемое средство для стопорения плунжера.
Для достижения указанного технического результата предлагаемая система отделения, в отличие от наиболее близкой к ней известной, снабжена платформой с отверстиями для опор размещаемой на ней отделяемой полезной нагрузки. Указанный вал жестко соединен с платформой и установлен внутри указанной трубы на радиальной и осевой опорах с возможностью вращения вместе с платформой. Система содержит также жестко связанный с основанием установленный перпендикулярно к нему цилиндрический канал. Труба плунжера, длина которой превышает длину цилиндрического канала, размещена в этом канале с возможностью только продольного перемещения. В трубе плунжера размещено средство для сообщения вращательного движения платформе, выполненное в виде торсиона, ориентированного по продольной оси указанной трубы и одним концом соединенного с валом, а другим - с опорным узлом, установленным в противоположной торцевой части трубы плунжера с возможностью свободного вращения только в направлении закрутки торсиона. Данный опорный узел является также средством для регулирования угловой скорости отделения путем изменения угла предварительной закрутки торсиона. Пружинное средство для сообщения поступательного движения плунжеру, передающему его платформе вместе с установленной на ней полезной нагрузкой, выполнено с возможностью передачи этого движения через указанный вал, размещенный в трубе плунжера, посредством воздействия этого пружинного средства на диск плунжера. Управляемое средство для стопорения плунжера связано с диском плунжера и выполнено с возможностью освобождения по команде на начало поступательного движения. Кроме того, система снабжена управляемым средством для стопорения платформы, выполненным с возможностью освобождения ее по команде на начало вращательного движения. Предлагаемая система содержит также установленное на основании средство для фиксации отделяемой полезной нагрузки на платформе в транспортном положении, выполненное с возможностью такого взаимодействия с опорами отделяемой полезной нагрузки, при котором после начала вращательного движения без подачи команды на это средство происходит освобождение полезной нагрузки в направлении поступательного движения.
Благодаря описанному выполнению плунжера и размещению его в указанном цилиндрическом канале с возможностью только продольного перемещения и описанному размещению пружинного средства для сообщения плунжеру поступательного движения при указанном пути взаимодействия с ним этого средства, а также благодаря подвижной установке вала и жесткой связи его с введенной в состав устройства платформой, предназначенной для размещения на ней (а не на диске плунжера) отделяемой полезной нагрузки, и наличию установленного указанным образом торсиона, связанного с валом, предлагаемая система имеет полностью независимые средства для сообщения отделяемой полезной нагрузке поступательного и вращательного движений. Одновременно это позволяет полностью разделить функции средств регулирования и использовать одно из них (средство регулирования усилия сжатия пружинного средства) для регулирования только линейной скорости отделения, а другое (опорный узел торсиона) - для регулирования только угловой скорости. При этом описанное выполнение таких средств обеспечивает полную независимость их функционирования и позволяет обойтись для изменения любой из указанных скоростей только воздействием на регулировочные элементы, не производя никаких замен элементов системы на элементы, имеющие измененные конструктивные параметры. Кроме того, становится возможным проектный выбор параметров источников поступательного и вращательного движения независимо друг от друга. Описанные изменения размещения и конструкции средств стопорения и средства для фиксации полезной нагрузки обеспечивают возможность согласования логики выполнения этих функций с названными выше особенностями конструкции средств для сообщения отделяемой полезной нагрузке линейной и угловой скоростей. А именно, становится возможным осуществлять процесс отделения полезной нагрузки поэтапно: вначале по команде, подаваемой на управляемое средство для стопорения платформы, происходит ее освобождение, и платформе вместе с отделяемой полезной нагрузкой сообщается вращательное движение с вектором угловой скорости, совпадающим с направлением предстоящего отделения, а затем по команде, подаваемой на управляемое средство для стопорения плунжера, начинается поступательное движение и отделение полезной нагрузки от платформы, которому не препятствует продолжающееся вращение, поскольку после начала вращения без подачи специальной команды на средство для фиксации отделяемой полезной нагрузки на платформе происходит освобождение полезной нагрузки для поступательного движения. Это делает управление процессом отделения более гибким.
Как следует из изложенного, рассмотренные отличия предлагаемой системы отделения от наиболее близкой к ней известной системы в совокупности с признаками, являющимися общими для обеих систем, обеспечивают достижение названного выше технического результата.
Возможность только продольного перемещения трубы плунжера может быть обеспечена, в частности, с помощью выполненного в стенке трубы плунжера продольного паза, в котором размещен штифт, установленный в стенке указанного цилиндрического канала.
Для регулирования хода плунжера труба плунжера может быть снабжена установленной на ней гайкой. Между этой гайкой и свободным концом цилиндрического канала может быть установлен демпфирующий элемент для смягчения удара при окончании поступательного движения плунжера.
Пружинное средство для сообщения поступательного движения плунжеру может быть выполнено в виде нескольких устройств, установленных на основании равномерно по окружности с центром на оси вращения вала, каждое из которых содержит пружину сжатия, размещенную в установленной на основании в гильзе и упирающуюся одним из концов в диск плунжера, а другим - в установленную в гильзе гайку. При этом гайки всех гильз в совокупности образуют средство для регулирования линейной скорости отделения путем изменения усилия сжатия.
Такое выполнение позволяет обеспечить большее усилие для сообщения отделяемой нагрузке поступательного движения при меньшем усилии, создаваемой каждой пружиной. Это делает изготовление пружинного источника поступательного движения более технологичным, а также позволяет уравновесить плунжер вместе с установленной на платформе отделяемой нагрузкой путем индивидуального подбора усилий сжатия разных пружин.
Управляемое средство для стопорения плунжера может быть выполнено в виде нескольких разрывных элементов, установленных на основании равномерно по окружности с центром на оси вращения вала и выполненных с возможностью одновременного срабатывания по команде на освобождение плунжера для поступательного движения.
Управляемое средство для стопорения платформы может быть выполнено в виде устройства управления штоком, вставленным в отверстие платформы в ее периферийной части, выполненного с возможностью вытягивания штока из указанного отверстия по подаваемой на указанное устройство команде. Такое выполнение позволяет использовать в качестве управляемого средства для стопорения платформы устройства, широко применяемые в космической технике, например, пирочеку.
Средство для фиксации отделяемой полезной нагрузки на платформе в транспортном положении в частном случае выполнения предлагаемой системы может содержать несколько фиксирующих устройств, установленных на основании равномерно по окружности с центром на оси вращения вала, каждое из которых содержит элемент для зацепления с ответным элементом одной из опор отделяемой полезной нагрузки, выполненный с возможностью выхода из зацепления при вращении платформы. Такое выполнение является наиболее простым и вместе с тем соответствует логике работы системы, предусматривающей освобождение отделяемой полезной нагрузки для поступательного движения после начала вращения без специальной команды и продолжение беспрепятственного вращения платформы вместе с полезной нагрузкой.
Возможна, например, такая реализация этого выполнения, при которой указанный элемент для зацепления с ответным элементом одной из опор представляет собой фиксатор с пазом, установленный в обойме, закрепленной на основании и имеющей продольный паз, а указанный ответный элемент представляет собой законцовку, выступающую в транспортном положении из отверстия в платформе в сторону основания и входящую в указанный паз фиксатора. Последний ориентирован по касательной к окружности с центром на оси вращения вала посредством штифта, установленного в фиксаторе и входящего в паз обоймы. При этом фиксатор выполнен с упором, между которым и основанием установлена пружина сжатия.
Предлагаемая система отделения иллюстрируется чертежами фиг.1-фиг.4, на которых показаны:
- на фиг.1 - общий вид предлагаемой системы отделения полезной нагрузки в продольном разрезе (в транспортном положении);
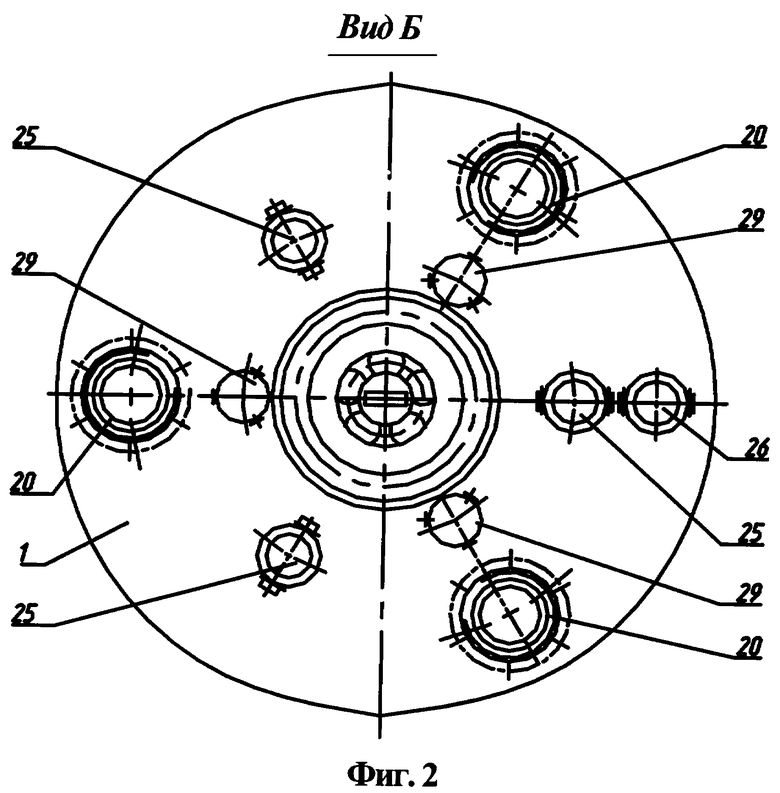
- на фиг.2 - размещение на основании устройств пружинного средства для сообщения поступательного движения плунжеру, средств для стопорения плунжера и платформы и средства для фиксации отделяемой полезной нагрузки на платформе в транспортном положении;
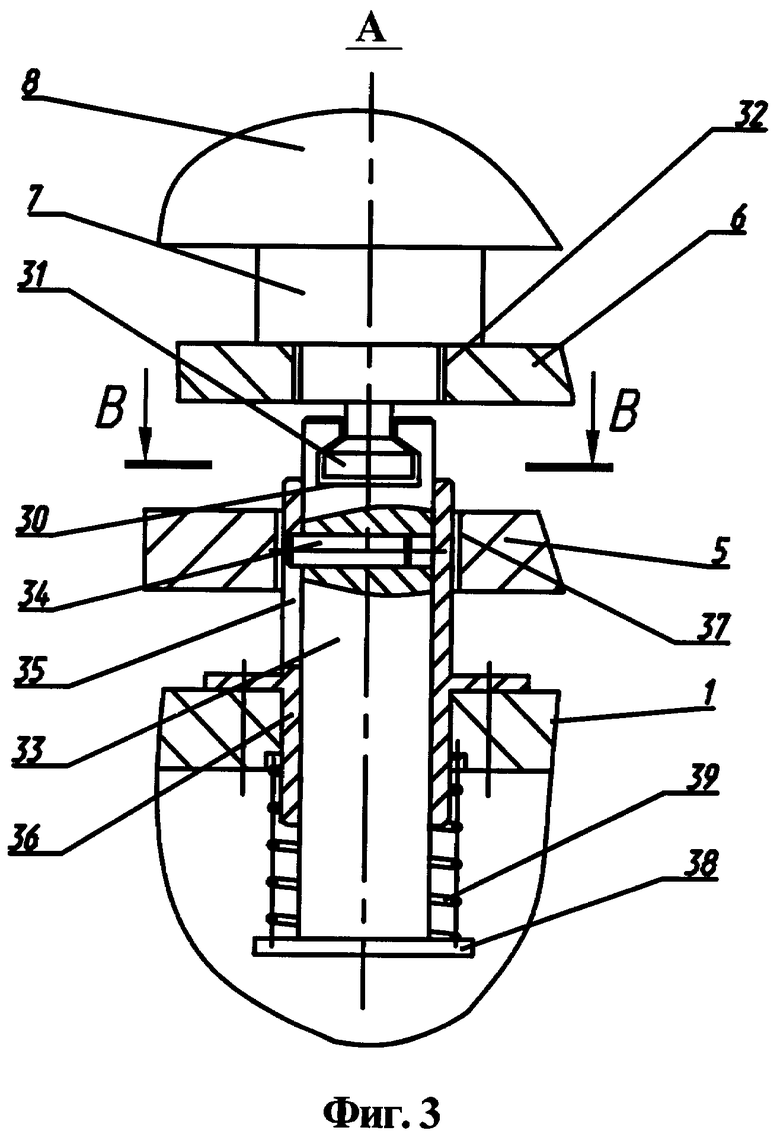
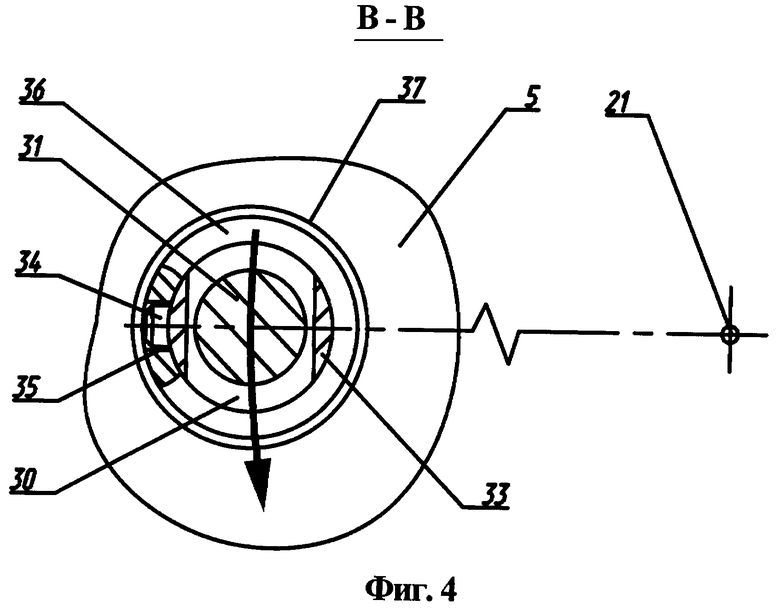
- на фиг.3 и фиг.4 - возможное выполнение фиксирующего устройства для фиксации отделяемой полезной нагрузки на платформе в транспортном положении.
Предлагаемая система (фиг.1) содержит основание 1, предназначенное для соединения с конструкцией 2 космического аппарата, и жестко связанный с основанием 1 установленный перпендикулярно к нему цилиндрический канал 3. В канале 3 соосно с ним размещена с возможностью перемещения только вдоль него труба 4 плунжера, имеющая длину, превышающую длину канала 3. Плунжер содержит также диск 5, имеющий центральное отверстие, соосное с трубой 4, и жестко соединенный с одной из ее торцевых частей (верхней по фиг.1).
Кроме того, система содержит платформу 6, предназначенную для установки на ней опор 7 отделяемой полезной нагрузки 8. Платформа 6 имеет перпендикулярный к ней вал 9, установленный внутри указанной торцевой части трубы 4 плунжера на радиальных 10, 11 и осевой 12 опорах. Указанные опоры в показанном на фиг.1 случае выполнения предлагаемой системы представляют собой шариковые подшипники.
В противоположной (нижней по фиг.1) торцевой части трубы 4 плунжера установлен опорный узел 13, в котором одним своим концом закреплен торсион 14, размещенный по продольной оси трубы 4. Опорный узел 13 выполнен с возможностью свободного вращения только в направлении закручивания торсиона 14. Этот узел может представлять собой, например, муфту одностороннего движения. Другим своим концом торсион 14 соединен с валом 9, на котором установлена платформа 6.
Продольное перемещение трубы плунжера в цилиндрическом канале 3 осуществляется по опоре скольжения 15, выполненной из малофрикционного материала. Возможность только продольного перемещения в показанном на фиг.1 частном случае выполнения обеспечивается с помощью установленного в стенке цилиндрического канала 3 штифта 16, по которому ориентирован продольный паз 17, выполненный в трубе 4.
На наружной стенке свободного (выходящего за пределы канала 3) конца трубы 4 плунжера имеется резьба, на которой установлена гайка 18. Между гайкой 18 и свободным концом канала 3 установлен демпфирующий элемент 19. Изменением положения гайки 18 может регулироваться ход Н плунжера.
На основании 1 расположено пружинное средство для сообщения поступательного движения плунжеру в виде нескольких устройств 20, установленных равномерно по окружности (фиг.2) с центром на оси 21 вращения вала 9 (совпадающей с продольной осью трубы 4 плунжера и канала 3). Каждое из них представляет собой гильзу 22, в которой размещена пружина 23 сжатия, опирающаяся одним своим концом на диск 5 плунжера, а другим - на установленную в резьбе гильзы 22 гайку 24, предназначенную для регулирования усилия сжатия пружины 23. Гайки 24 всех устройств 20 в совокупности являются средством для регулирования линейной скорости отделения полезной нагрузки.
На основании 1 расположено также управляемое средство для стопорения плунжера в виде нескольких разрывных управляемых устройств 25 (например, пироболтов), имеющих связь с диском 5 плунжера и установленных равномерно по окружности (фиг.2) с центром на оси 21 вращения вала 9.
Далее, на основании 1 установлено управляемое средство 26 для стопорения платформы (например, пирочека), содержащее шток 27, входящий в отверстие 28, выполненное в периферийной части платформы 6.
Кроме того, на основании 1 расположено средство для фиксации отделяемой нагрузки на платформе в транспортном положении. Это средство выполнено в виде нескольких фиксирующих устройств 29, установленных равномерно по окружности (фиг.2) с центром на оси 21 вращения вала 9.
Возможное расположение на основании 1 перечисленных устройств 20 пружинного средства для сообщения поступательного движения плунжеру, устройств 25, 26 средств для стопорения плунжера и платформы и устройств 29 средства для фиксации отделяемой нагрузки показано на фиг.2, представляющей собой вид Б на фиг.1.
Устройство 29 средства для фиксации отделяемой нагрузки на платформе в транспортном положении (выносной элемент А на фиг.1) в более крупном масштабе показано на фиг.3. Отделяемая полезная нагрузка 8 установлена на опорах 7, опирающихся на платформу 6 и входящих в ее отверстия 32. Каждое из устройств 29 имеет элемент для зацепления с ответным элементом одной из опор 7 отделяемой полезной нагрузки. Указанный элемент выполнен с возможностью выхода из зацепления при вращении платформы 6. В показанном на фиг.2 случае выполнения упомянутый элемент устройства 29 представляет собой фиксатор 33 с пазом 30, установленный в обойме 36, а ответный элемент опоры 7 полезной нагрузки - ее законцовку 31, выступающую из отверстия 6 в платформе в транспортном положении в сторону основания 1 и входящую в паз 30. Паз 30, как показано на фиг.4 (сечение В-В на фиг.3 в увеличенном масштабе), ориентирован по касательной к окружности с центром на оси 21 вращения вала 9 посредством штифта 34, установленного в фиксаторе 33 и входящего в продольный паз 35 обоймы 36, закрепленной на основании 1 и проходящей через отверстие 37 в диске 5 плунжера (если фиксирующие устройства 29 размещены по показанной на фиг.2 окружности с диаметром менее диаметра диска плунжера; в противном случае обойма 36 и другие элементы фиксирующего устройства 29 находятся за пределами диска плунжера). Фиксатор 33 выполнен с упором 38, между которым и основанием 1 установлена пружина 39 сжатия (фиг.3).
Предлагаемая система отделения используется и работает следующим образом.
В транспортном положении диск 5 плунжера опирается на основание 1 и зафиксирован относительно него устройствами 25 средства стопорения плунжера. Пружины 23, вставленные в гильзы 22, удерживаются гайками 24, служащими также для регулировки усилия сжатия пружин 23 (и, следовательно, линейной скорости полезной нагрузки при отделении). Линейная скорость полезной нагрузки при отделении может регулироваться также изменением рабочего хода Н плунжера с помощью гайки 18. Полезная нагрузка 8 устанавливается на платформу 6, при этом опоры 7 опираются своими торцами на платформу 6 и входят в ее отверстия 32 (фиг.3). Проворотом платформы 6 с установленной на ней полезной нагрузкой 8 и сжатием пружин 39 законцовки 31 опор 7 вводятся в пазы 30 фиксаторов 33.
Платформа 6 фиксируется штоком 27 устройства 26 стопорения платформы, установленного на основании 1. Источник вращательного движения - торсион 14 закручивается поворотом опорного узла 13 до момента, необходимого для обеспечения требуемой скорости вращения полезной нагрузки 8 при ее отделении. В закрученном состоянии торсион 14 удерживается опорным узлом 13, который может вращаться только в одну сторону.
Как нетрудно видеть, средства для сообщения отделяемой полезной нагрузке угловой и линейной скоростей и средства регулирования этих скоростей полностью независимы друг от друга.
Для отделения полезной нагрузки бортовые средства автоматического управления или оператор первой выдают команду начала вращательного движения на средство 26 стопорения платформы 6. По этой команде происходит срабатывание средства 26 стопорения платформы, шток 27 выдвигается из отверстия платформы и освобождает платформу 6, позволяя ей и валу 9 вращаться в подшипниках 10, 11 и 12 под действием момента, созданного торсионом 14. Торсион, развернувшись на угол первоначальной закрутки, далее продолжает свободно вращаться в опорном узле 13 вместе с платформой 6 и установленной на ней полезной нагрузкой 8, не создавая препятствия их вращению.
После начала вращения платформы 6 законцовка 31 каждой из опор 7 выходит из паза 30 взаимодействующего с ней фиксатора 33 фиксирующего устройства 29 в направлении, показанном стрелкой на фиг.4. Фиксатор 33 под действием пружины 39 вдвигается внутрь обоймы 36, тем самым устраняя возможность столкновения с законцовкой 31, следующей по ходу вращения опоры 7. Таким образом, средство фиксации отделяемой полезной нагрузки на платформе в транспортном положении, содержащее фиксирующие устройства 29, обеспечивает автоматическое, без подачи на него специальной команды, освобождение отделяемой полезной нагрузки для поступательного движения сразу после начала вращения. В результате описанного функционирования этого средства обеспечивают беспрепятственное продолжение вращения платформы с установленной на ней полезной нагрузкой и готовность системы к выполнению команды на начало поступательного движения.
Затем бортовыми средствами автоматического управления или оператором подается команда на начало поступательного движения. По этой команде происходит срабатывание разрывных устройств 25 средства стопорения плунжера. Диск 5 плунжера освобождается, и под действием сжатых пружин 23 плунжер 5 совершает поступательное движение вдоль трубы 4 на рабочем ходе Н по опоре 15 скольжения, удерживаясь от проворачивания контактом продольного паза 17 в трубе 4 со штифтом 16. Поступательное движение плунжера через осевую опору - подшипник 12 - передается на вал 9 и платформу 6, продолжающую при этом свое вращение. В конце рабочего хода H плунжера происходит соударение гайки 18 плунжера со свободным концом цилиндрического канала 3; энергия удара поглощается демпфером 19. После этого полезная нагрузка 8, двигаясь по инерции, выходит из контакта с платформой 6 и продолжает поступательное движение с заданной скоростью в направлении, показанном стрелкой X, сохраняя вращение вокруг оси 21, параллельной направлению поступательного перемещения полезной нагрузки при отделении.
Предпочтительной областью применения предлагаемой системы отделения является обеспечение посадки отделяемой от базового космического аппарата полезной нагрузки в заданном районе на поверхности планеты.
Источники информации
1. Патент Российской Федерации №2293694, опубл. 20.02.2007.
2. В.И.Попов. Системы ориентации и стабилизации космических аппаратов. Москва, "Машиностроение", 1986.
3. Патент Российской Федерации №2276046, опубл. 10.05.2006.
4. Патент США №4,067,308, опубл. 10.06.1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫВЕДЕНИЯ ВРАЩАТЕЛЬНОГО ТИПА | 2022 |
|
RU2807447C1 |
| Настраиваемый пружинный толкатель | 2024 |
|
RU2831550C1 |
| УСТРОЙСТВО МНОЖЕСТВЕННОГО УДЕРЖИВАНИЯ И ВЫСВОБОЖДЕНИЯ ДЛЯ КОСМИЧЕСКОГО АППАРАТА И СПОСОБЫ ВЫСВОБОЖДЕНИЯ КОСМИЧЕСКОГО АППАРАТА ИЗ ВЫВОДНОГО УСТРОЙСТВА РАКЕТЫ-НОСИТЕЛЯ И ДЛЯ УСТАНОВКИ УСТРОЙСТВА МНОЖЕСТВЕННОГО УДЕРЖИВАНИЯ И ВЫСВОБОЖДЕНИЯ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2787984C1 |
| НАКЛОННЫЙ АДАПТЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ НЕСКОЛЬКИХ ПОЛЕЗНЫХ НАГРУЗОК НА ОДНОЙ РАКЕТЕ-НОСИТЕЛЕ | 1996 |
|
RU2155146C2 |
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2524912C1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ СФЕРИЧЕСКОЙ ФОРМЫ | 2003 |
|
RU2276046C2 |
| Устройство для отделения наноспутников с заданными параметрами от сегмента МКС | 2016 |
|
RU2653666C2 |
| ТОЛКАТЕЛЬ СИСТЕМЫ ОТДЕЛЕНИЯ МАЛЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2022 |
|
RU2786090C1 |
| УСТРОЙСТВО ВЫДВИЖЕНИЯ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2009 |
|
RU2387586C1 |
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
Изобретение относится к средствам соединения и разделения элементов космических объектов. Система содержит основание (1), которое соединяется с конструкцией (2) космического аппарата, и плунжер в виде трубы (4) с диском (5). Имеются также вал (9), пружинное средство (20) для сообщения поступательного движения плунжеру, управляемое средство (25) для стопорения плунжера и освобождения его по команде на начало поступательного движения. Система снабжена установленной на валу (9) платформой (6) для размещения отделяемой полезной нагрузки (8). С основанием (1) жестко связан канал (3). Труба (4) установлена в канале (3) с возможностью только продольного перемещения. С валом (9) соединен одним концом торсион (14), другим концом соединенный с опорным узлом (13). Этот узел служит для регулирования угловой скорости отделения путем изменения угла закрутки торсиона. Средство (20) имеет гайку (24) для регулирования линейной скорости отделения путем изменения усилия сжатия пружины (23). Управляемое средство (26) служит для стопорения платформы (6) и освобождения ее по команде на начало вращательного движения, подаваемой ранее команды на начало поступательного движения. Для фиксации отделяемой полезной нагрузки и освобождения ее перед отделением служит средство (29). Система сообщает полезной нагрузке при отделении вращательное движение вокруг оси, направленной по вектору скорости поступательного движения. Технический результат изобретения состоит в исключении взаимосвязи линейной и угловой скоростей отделения полезной нагрузки и обеспечении возможности их регулирования независимо одной от другой и без изменения конструктивных параметров элементов системы. 8 з.п. ф-лы, 4 ил.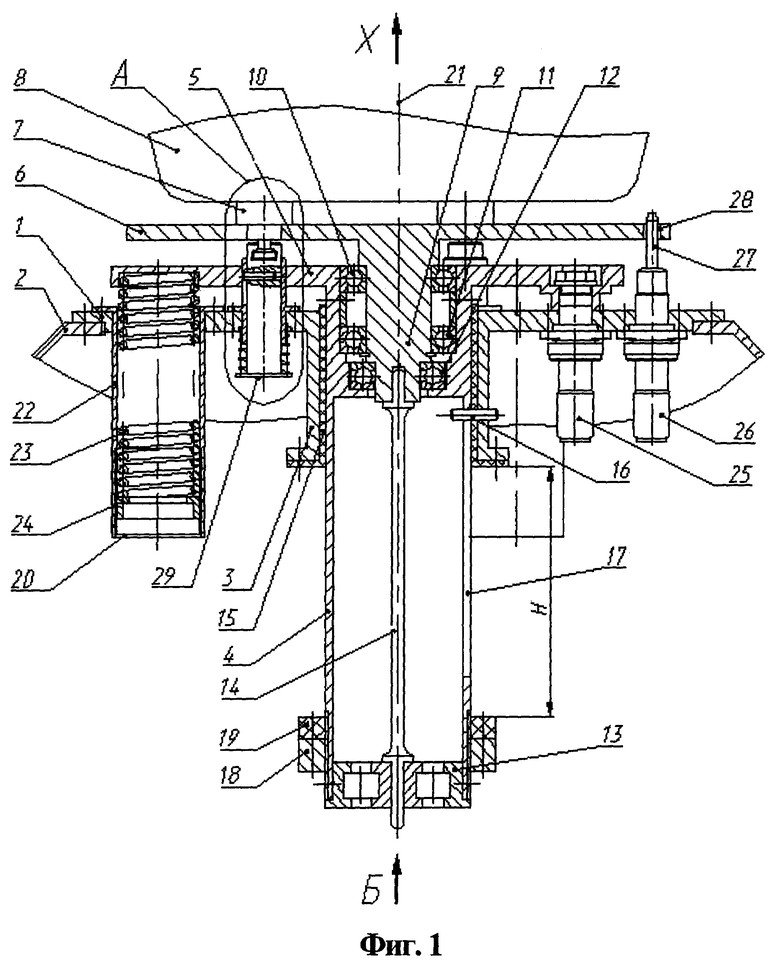
1. Система отделения полезной нагрузки от космического аппарата с сообщением ей вращательного движения, вектор скорости которого совпадает с направлением вектора скорости поступательного движения при отделении, содержащая основание, предназначенное для соединения с конструкцией космического аппарата, и плунжер в виде трубы, жестко соединенной одной из ее торцевых частей с диском, имеющим соосное с трубой центральное отверстие, вал, размещенный внутри трубы плунжера, установленное на основании пружинное средство для сообщения поступательного движения плунжеру, снабженное средством регулирования линейной скорости отделения путем изменения усилия предварительного сжатия указанного пружинного средства, а также управляемое средство для стопорения плунжера, отличающаяся тем, что она снабжена платформой с отверстиями для опор размещаемой на ней отделяемой полезной нагрузки, указанный вал жестко соединен с платформой и установлен внутри указанной трубы плунжера на радиальной и осевой опорах с возможностью вращения вместе с платформой, указанная система содержит также жестко связанный с основанием установленный перпендикулярно ему цилиндрический канал, труба плунжера имеет длину, превышающую длину этого канала, и размещена в нем с возможностью только продольного перемещения, в трубе плунжера размещено средство для сообщения вращательного движения платформе, выполненное в виде торсиона, ориентированного по продольной оси указанной трубы и одним концом соединенного с валом, а другим - с опорным узлом, установленным в противоположной торцевой части трубы плунжера с возможностью свободного вращения только в направлении закрутки торсиона и являющимся средством для регулирования угловой скорости отделения путем изменения угла предварительной закрутки торсиона, при этом пружинное средство для сообщения поступательного движения плунжеру, передающему его платформе вместе с установленной на ней полезной нагрузкой, выполнено с возможностью передачи этого движения через указанный вал, размещенный в трубе плунжера, посредством воздействия этого пружинного средства на диск плунжера, управляемое средство для стопорения плунжера связано с диском плунжера и выполнено с возможностью освобождения его по команде на начало поступательного движения, причем система снабжена управляемым средством для стопорения платформы, выполненным с возможностью ее освобождения по команде на начало вращательного движения, и, кроме того, она содержит установленное на основании средство для фиксации отделяемой полезной нагрузки на платформе в транспортном положении, выполненное с возможностью взаимодействия с опорами отделяемой полезной нагрузки и обеспечивающее без подачи команды на это средство освобождение полезной нагрузки в направлении поступательного движения после начала вращательного движения.
2. Система по п.1, отличающаяся тем, что средство для фиксации отделяемой полезной нагрузки на платформе в транспортном положении содержит несколько фиксирующих устройств, установленных на основании равномерно по окружности с центром на оси вращения вала, каждое из которых содержит элемент для зацепления с ответным элементом одной из опор отделяемой полезной нагрузки, выполненный с возможностью выхода из зацепления при вращении платформы.
3. Система по п.2, отличающаяся тем, что указанный элемент для зацепления с ответным элементом одной из опор представляет собой фиксатор, установленный в обойме, закрепленной на основании, и имеющей паз, а указанный ответный элемент одной из опор представляет собой законцовку этой опоры, выступающую в транспортном положении из отверстия в платформе в сторону основания и входящую в указанный паз фиксатора, последний ориентирован по касательной к окружности с центром на оси вращения вала посредством штифта, установленного в фиксаторе и входящего в паз обоймы, при этом фиксатор выполнен с упором, между которым и основанием установлена пружина сжатия.
4. Система по любому из пп.1-3, отличающаяся тем, что управляемое средство для стопорения плунжера выполнено в виде нескольких разрывных элементов, установленных на основании равномерно по окружности с центром на оси вращения вала и выполненных с возможностью одновременного срабатывания по подаваемой на эти элементы команде.
5. Система по любому из пп.1-3, отличающаяся тем, что пружинное средство для сообщения поступательного движения плунжеру выполнено в виде нескольких устройств, установленных на основании равномерно по окружности с центром на оси вращения вала, каждое из которых содержит пружину сжатия, размещенную в установленной на основании в гильзе и упирающуюся одним из концов в диск плунжера, а другим - в установленную в гильзе гайку, при этом гайки всех гильз в совокупности образуют средство для регулирования линейной скорости отделения путем изменения усилия сжатия.
6. Система по п.5, отличающаяся тем, что управляемое средство для стопорения плунжера выполнено в виде нескольких разрывных элементов, установленных на основании равномерно по окружности с центром на оси вращения вала и выполненных с возможностью одновременного срабатывания по команде на начало поступательного движения.
7. Система по любому из пп.1-3, 6, отличающаяся тем, что управляемое средство для стопорения платформы выполнено в виде устройства управления штоком, вставленным в отверстие платформы в ее периферийной части, выполненного с возможностью вытягивания штока по команде на начало вращательного движения.
8. Система по любому из пп.1-3, 6, отличающаяся тем, что для обеспечения только продольного перемещения трубы плунжера в цилиндрическом канале в стенке трубы плунжера выполнен продольный паз, в котором размещен штифт, установленный в стенке указанного цилиндрического канала.
9. Система по любому из пп.1-3, 6, отличающаяся тем, что труба плунжера снабжена установленной на ней гайкой, между которой и свободным концом указанного цилиндрического канала установлен демпфирующий элемент.
| US 4067308 A, 10.01.1978 | |||
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2144892C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ОТДЕЛЯЕМЫХ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ ЧАСТЕЙ ИЗДЕЛИЯ ОТ КОРПУСА | 1994 |
|
RU2075874C1 |
| Замок-толкатель | 1973 |
|
SU576443A1 |
| US 3981467 A, 21.09.1976. | |||

