Изобретение относится к средствам измерения, контроля и диагностики и может быть использовано для мониторинга деформаций крупногабаритных сооружений, в частности, для измерения деформации опорных и несущих конструкций мостов, защитной оболочки ядерного реактора, объектов нефтегазового комплекса.
Известно устройство (струнный датчик), содержащее вибратор в виде ленты, выполненной за одно целое с утолщенными концами, причем переход от ленточной части к утолщенным концам выполнен с радиусами, не превышающими 2 % от длины ленточной части вибратора, и утолщенными концами вибратор закреплен в корпусе, на котором установлено также устройство для возбуждения поперечных колебаний ленты вибратора и съема информации о частоте [патент - SU 1840332 A1].
Известен датчик для измерения деформаций объекта, содержащий основание для размещения объекта, гибкую ленту, предназначенную для охватывания объекта по периметру, корпус с размещенным в нем неподвижным контактом в виде подпружиненного относительно гибкой ленты высокоомного проводника, расположенного перпендикулярно продольной оси ленты, подвижный контакт в виде зигзагообразного токопроводящего элемента, закрепленного вдоль гибкой ленты, и измерительную цепь, связывающую токопроводящий элемент и неподвижный контакт с регистратором [патент РФ №2440554].
К недостаткам данных датчиков можно отнести:
- низкую точность и недостаточно большой диапазон измерений, обусловленные геометрическими параметрами ленты;
- зависимость частоты колебаний вибратора от температуры вследствие изменения с температурой модуля упругости материала вибратора;
- зависимость характеристики преобразования датчика от точности изготовления геометрических размеров ленты вибратора и переходных зон, что снижает точность воспроизведения характеристик в различных экземплярах датчиков;
- наличие токопроводящих элементов, в результате чего невозможно проводить измерения в области действия высокого напряжения;
- подверженность влиянию внешнего электромагнитного поля.
Известен датчик деформации, содержащий преобразователь деформации в виде пластины, с внедренным оптоволокном с записанной волоконной решеткой Брэгга (далее ВБР) [US 2007193362 А1]. Принцип работы датчика основан на смещении и отраженной резонансной длины волны ВБР в зависимости от внешнего воздействия на пластину.
Известен волоконно-оптический датчик деформации, содержащий упруго-деформируемый элемент (УДЭ) с внедренными двумя волоконными решетками показателя преломления (ВБР) и подвижную штангу, преобразующую перемещение в изгибную деформацию УДЭ, что вызывает деформацию ВБР и соответственно смещение резонансных длин волн ВБР [RU 77420 U1].
Известен волоконно-оптический датчик (ВОД) и комплект для измерения деформаций защитной оболочки ядерного реактора содержащий: две стойки, рабочее оптическое волокно с брегговской решеткой (ВБР), одним концом зафиксированное по отношению к первой стойке, а вторым концом ко второй стойке, компенсирующее оптическое волокно с ВБР, один конец которого размещен так, чтобы имелась возможность смещения по отношению к стойкам, причем рабочее и компенсирующее оптические волокна оснащены разъемом для соединения с источником света с широким спектром излучения, также со спектрометром для приема и детектирования света, отраженного от ВБР в рабочем оптическом волокне и в компенсирующем оптическом волокне [патент на полезную модель 163742].
К недостаткам вышеперечисленных волоконно-оптических датчиков можно отнести:
- низкую надежность из-за реализации принципа преобразования на изменении параметров ВБР, реагирующих на микродеформацию оптического волокна, что является их недостатком при корпусировании (то есть сборке ВОД), при воздействии механических факторов, микродеформации после определенного срока эксплуатации ВОД, которые в конечном счете приведут к микротрещинам или даже разрушению оптического волокна;
- низкая повторяемость метрологических характеристик ВОД на ВБР практически нулевая.
Наиболее близким по конструктивному исполнению оптической системы к предлагаемому изобретению волоконно-оптический преобразователь перемещения, содержащий соосно расположенные непрозрачную шторку с отверстием, жгуты подводящих и отводящих оптических волокон, в приемном торце жгута отводящих волокон соосно с подводящим оптическим волокном и отверстием в шторке расположен отрезок технологического волокна, вокруг которого расположены приемные торцы отводящих оптических волокон, разделенные на две равные по количеству волокон группы, симметрично расположенные друг над другом в направлении перемещения шторки [патент на изобретение РФ 2290605 Волоконно-оптический преобразователь перемещения; Волоконно-оптические приборы и системы: Научные разработки НТЦ "Нанотехнологии волоконно-оптических систем" Пензенского государственного университета Ч. I / Т. И. Мурашкина, Е. А. Бадеева. СПб.: Политехника, 2018. 187 с.: ил. С.149-154, https://doi.org/10.25960/7325-1132-1, ISBN 978-5-7325-1132-1].
Недостатками данного устройства являются:
- отсутствие элементов, воспринимающих деформацию объектов;
- дополнительные погрешности датчика при повышенных температуре, влажности, пыли из-за негерметичного исполнения конструкции преобразователя, приводящего к изменению прозрачности среды между оптическими элементами преобразователя.
Техническим результатом изобретения является возможность измерения деформации крупногабаритных сооружений в разных диапазонах изменения деформации, улучшение метрологических и эксплуатационных характеристик, повышение герметичности и надежности конструкции датчика деформации, абсолютная искро-взрыво-пожаробезопасность, экологическая безопасность.
Технический результат достигается тем, что:
1. Волоконно-оптический датчик деформации, содержащий подводящие и отводящие оптические волокна, между которыми размещена шторка с отверстием, отличается тем, что в конструкцию введены два цилиндрических стержня, соосно по плотной посадке расположенные в цилиндрическом корпусе, шторка выполнена в выступе в центральной части первого стержня, второй стержень содержит выступ, в котором перпендикулярно продольной оси выполнено второе сквозное отверстие, а вдоль оси - прорезь, с двух сторон которой в выступе соосно друг другу и соосно первому отверстию в шторке выполнены сквозные третье верхнее и четвертое нижнее отверстия, причем излучающий торец подводящего оптического волокна протянут через второе отверстие и закреплен с помощью первой втулки в третьем верхнем отверстии, а приемные торцы отводящих оптических волокон закреплены с помощью второй втулки в нижнем четвертом отверстии; вне зоны измерения все оптические волокна объединяются в волоконно-оптический кабель, герметично закрепленный в корпусе с помощью третьей втулки, которая с помощью сварки закреплена в пятом сквозном отверстии корпуса.
2. Волоконно-оптический датчик по п. 1 отличается тем, что в корпусе выполнено запаиваемое сквозное технологическое отверстие для откачки воздуха из корпуса, а пространство между стержнями заполнено инертным газом.
3. Волоконно-оптический датчик по п. 1 отличается тем, что к внешним торцам стержней приварены проушины с отверстиями.
4. Волоконно-оптический датчик по п. 1 отличается тем, что на торцах стержней выполнены резьбы, на которых закреплены введенные в конструкцию две накидные гайки, внутри каждой из которых соосно стержню установлены верхние перекладины введенных в конструкцию хвостовиков в виде буквы «Т», по внешним контурам накидных гаек, соединенных со стержнями выполнена сварка.
5. Волоконно-оптический датчик по п. 1 отличается тем, что на торцах каждого из стержней сделан цилиндрический выступ, диаметр которого меньше диаметра стержня и в котором выполнено поперечное сквозное отверстие, в конструкцию введены хвостовики в виде буквы «Т», в верхней перекладине которой выполнены поперечное сквозное отверстие и продольное отверстие, повторяющее формы и размеры цилиндрического выступа, причем хвостовики и стержни скреплены между собой с помощью штифтов, установленных в сквозные поперечные отверстия стержней и хвостовиков, и фиксирующей штифты в хвостовике сварки.
6. Волоконно-оптический датчик по п. 1 отличается тем, что к стержням с помощью точечной сварки приварен хвостовик в виде лестницы из двух ступеней, причем верхняя ступень имеет размеры и форму торца стержня, а нижняя ступень имеет несквозное отверстие, повторяющее контур и размеры объекта, к которому крепится с помощью контурной сварки датчик деформации.
Сущность изобретения поясняется фигурами:
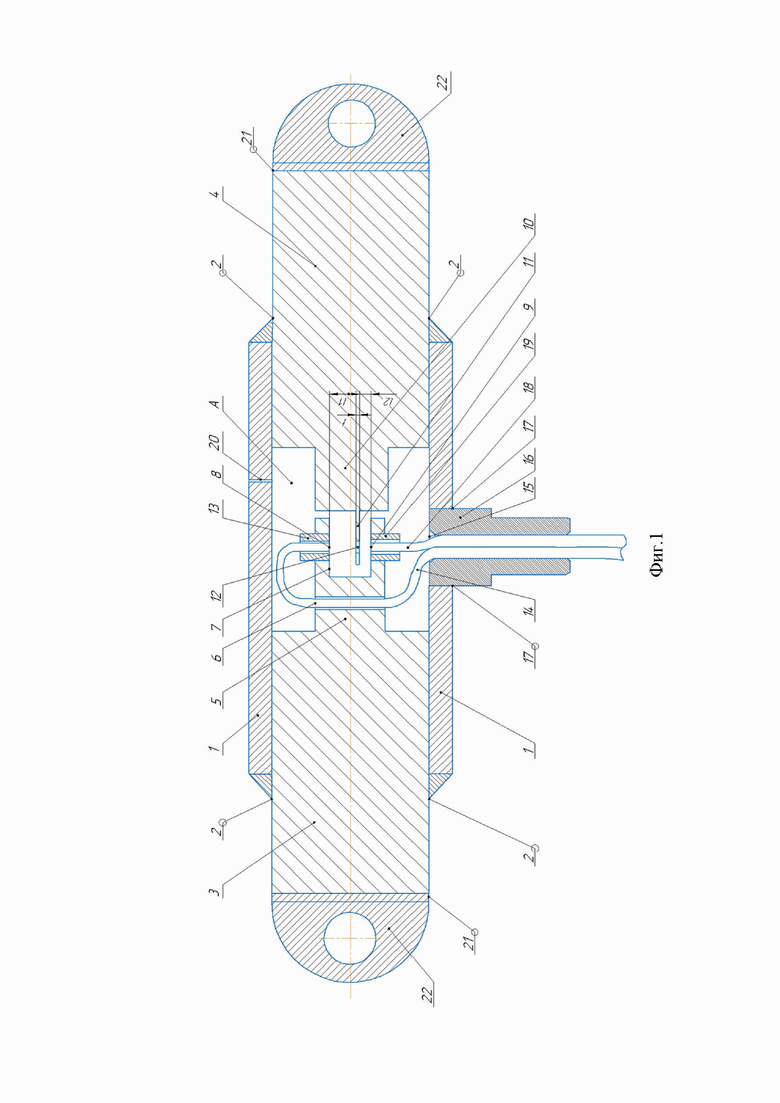
- на фиг. 1 приведен продольный разрез датчика деформации аттенюаторного типа с основными обозначениями;
- на фиг. 2 - 4 приведены варианты крепления датчика деформации на объектах.
Волоконно-оптический датчик деформации состоит из корпуса 1, представляющего собой полый цилиндр, в котором жестко (например, с помощью сварки 2) закреплены стержни 3 и 4 круглого сечения (фиг.1). Стержень 3 содержит выступ 5, в котором перпендикулярно продольной оси выполнено сквозное отверстие 6, а вдоль оси - прорезь 7. С двух сторон прорези 7 в выступе 5 соосно друг другу выполнены сквозные отверстия 8 и 9. Стержень 4 содержит большой выступ 10 с прямоугольной шторкой 11, в котором перпендикулярно оси выполнено сквозное отверстие 12.
Стержни 3 и 4 закреплены в корпусе 1 так, что совпадают оси отверстий 8, 9 и 12, причем шторка 11 расположена между сторонами прорези 7 на расстояниях l1 и l2 относительно отверстий 8 и 9 соответственно. Выступ 11 имеет толщину t.
В отверстии 8 с помощью втулки 13 закреплен рабочий торец подводящего оптического волокна (ПОВ) 14. ПОВ 14 протянуто через отверстие 6 в стержне 3, отверстие 15 в корпусе 1, втулку 16, закрепленную с помощью сварки 17 в корпусе 1.
Рабочие торцы отводящего оптического волокна (ООВ) 18 закреплены с помощью втулки 19 в отверстии 9 стержня 3. ООВ 18 протянуто через отверстие 15 в корпусе 1, втулку 16.
Воздух в камере измерений откачивается через технологическое отверстие 20, которое после откачки герметизируется.
Оптические волокна 14 и 18 объединяются в волоконно-оптический кабель, закрепленный во втулке 16, которая с помощью сварки 17 соединена с корпусом 1.
Юстировка ПОВ 14 и ООВ 18 относительно отверстия 12 в шторке 11 осуществляется перемещением втулок 13 и 19 вдоль отверстия 12 с дальнейшей жесткой фиксацией, например, с помощью клея.
Для крепления датчика на объекте 21 предусмотрено несколько вариантов:
1) к стержням 3 и 4 с помощью сварки 22 приварены проушины 23 (фиг.1);
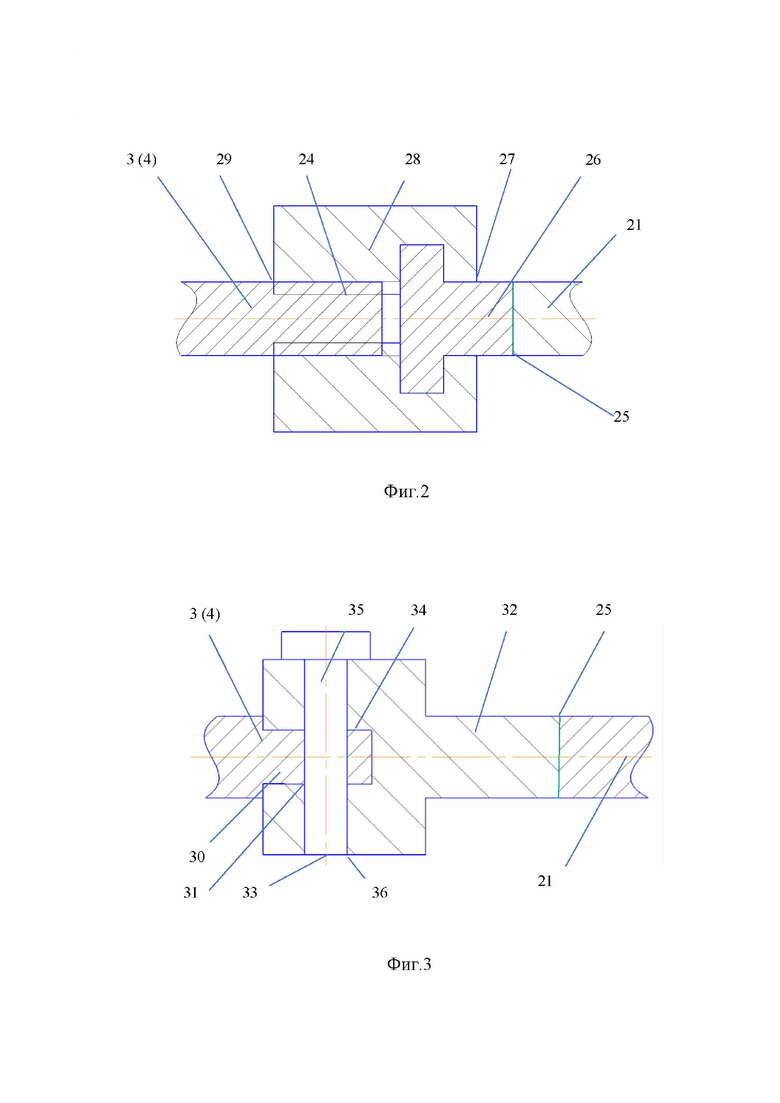
2) на торцах стержней 3 и 4 выполнена резьба 24. На объекте 21 с помощью сварки 25 закреплен хвостовик 26 в виде буквы «Т», на котором предварительно с помощью сварки 27 закреплена накидная гайка 28 (фиг.2). Крепление накидной гайки 28 и стержней 3 или 4 с помощью резьбы 24 жестко фиксируется с помощью сварки 29;
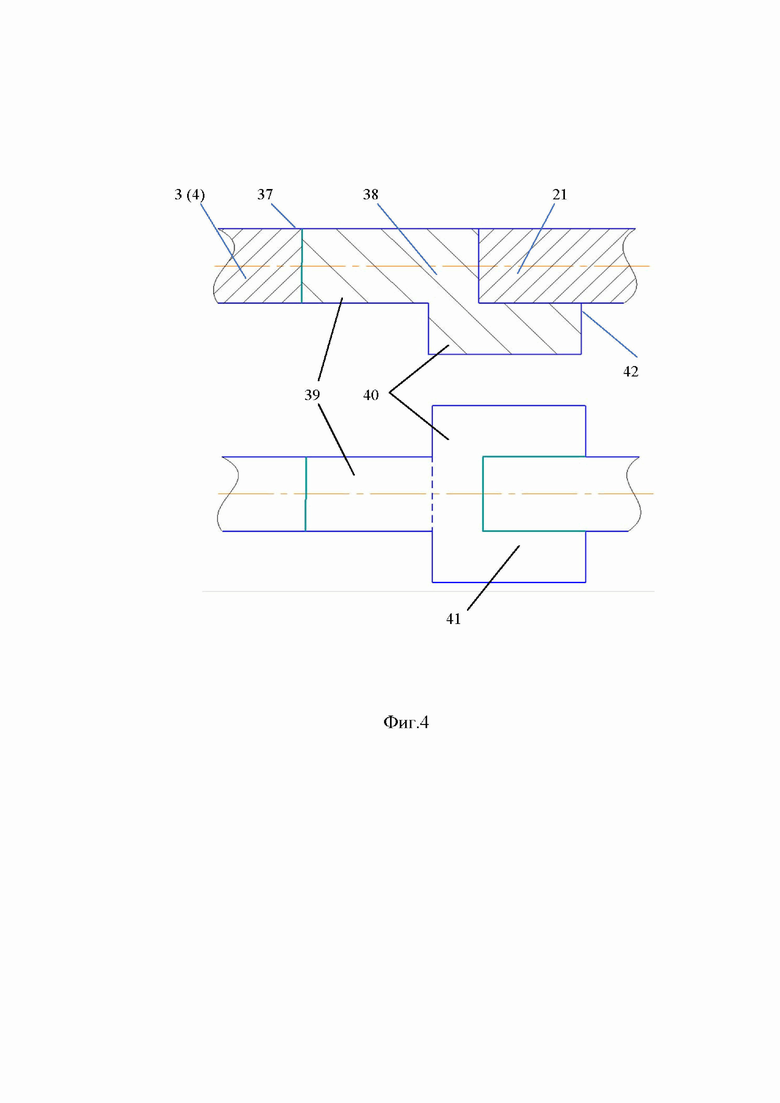
3) на торцах стержней 3 и 4 сделан цилиндрический выступ 30, диаметр которого меньше диаметра стержня (фиг.3). В выступе 30 выполнено поперечное сквозное отверстие 31. На объекте 21 с помощью сварки 25 закреплен хвостовик 32 в виде буквы «Т», в верхней перекладине которой выполнены поперечное сквозное отверстие 33 и продольное отверстие 34, повторяющее формы и размеры цилиндрического выступа 30. При установке датчика на объект 21 отверстия 31 и 33 совмещаются путем установки выступа 30 в отверстие 34. Затем в совмещенные отверстия устанавливается штифт 35, который жестко фиксируется с помощью сварки 36.
4) к стержням 3 и 4 с помощью точечной сварки 37 приварен хвостовик 38 в виде лестницы из двух ступеней. Верхняя ступень 39 хвостовика 38 имеет размеры и форму торца стержня 3(4), а нижняя ступень 40 - имеет несквозное отверстие 41, повторяющее контур и размеры объекта 21, к которому крепится датчик деформации (фиг.4). Жесткое крепление хвостовика 38 к объекту 21 осуществляется с помощью контурной сварки 42.
Установление причинно-следственной связи заявляемых признаков и достигаемого технического эффекта проведем следующим образом.
Введение стержней 3 и 4 необходимо для восприятия измеряемой деформации ε.
Соединения корпуса 1 со стержнями 3 и 4 с помощью сварки 2, втулки 16 с корпусом 1 с помощью сварки 17 обеспечивают герметичность конструкции датчика.
Проушины 22 необходимы для крепления датчика на объекте, испытывающем деформацию ε, и передачи этой деформации стержням 3 и 4. Такое крепление самое простое.
Сварка 29, используемая во втором варианте крепления датчика деформации на объекте 21, осуществляется в отдельных точках (например, в 4-х), равномерно расположенных по окружности, что практически исключает деформацию элементов датчика в момент его крепления на объекте или во время эксплуатации.
Штифтовое соединение и фиксация с помощью сварки 36, используемые в третьем варианте крепления датчика деформации на объекте 21, простое с точки зрения технологического исполнения. В этом варианте отсутствует влияние сварки на точность измерения деформации, так как сварные напряжения не будут влиять на систему «датчик-объект».
Сварка по контуру 42, используемая в четвертом варианте крепления датчика деформации к объекту 21, оказывает минимальное влияние на результат измерения деформации, так как зона сварки отнесена от датчика на расстояние, определяемое размерами хвостовика 38.
Заполнение свободного пространства между стержнями 3 и 4 инертным газом (например, аргоном) обеспечивает точность функционирования датчика в условиях отрицательных температур за счет исключения выпадения конденсата (точка росы) на элементы оптической системы.
Закрепление ПОВ 14 и ООВ 18 в цилиндрических втулках 13 и 19 позволяет избежать изгибов и нежелательных влияний вибраций на оптические волокна, а применение стержня 4 с закрепленной на ней шторкой 12 с отверстием позволяет изменять интенсивность излучения на приемных торцах ООВ 18, а не воздействовать на само оптическое волокно, что ведет к повышению надежности датчика.
Закрепление оптических волокон втулкой 16 исключает излом оптических волокон в процессе эксплуатации, тем самым повышается надежность датчика.
Соосное расположение ПОВ 14, отверстия 12 в шторке 11 большого выступа 10 и коаксиальное расположение ООВ 18 двух измерительных каналов обеспечивают реализацию дифференциальной схемы преобразования светового потока, когда при Z=0 одинаково открыты верхняя половина отводящих оптических волокон первого измерительного канала и нижняя половина отводящих оптических волокон второго измерительного канала [Волоконно-оптический преобразователь перемещения; Волоконно-оптические приборы и системы: Научные разработки НТЦ "Нанотехнологии волоконно-оптических систем" Пензенского государственного университета Ч. I / Т. И. Мурашкина, Е. А. Бадеева. СПб.: Политехника, 2018. - С.149-154].
Модуляция оптического сигнала осуществляется за счет перекрытия части светового потока от ПОВ 6 шторкой 11 с отверстием 12.
Совокупность признаков приводит к повышению точности позиционирования оптических элементов друг относительно друга, технологичности и герметичности датчика при высокой точности измерений, за счет реализации дифференциального преобразования оптических сигналов.
Волоконно-оптический датчик деформации аттенюаторного типа работает следующим образом.
От источника излучения (светодиода) по ПОВ 14 световой поток Ф0 под апертурным углом ΘNA падает на шторку 11 с отверстием 12, проходит сквозь него и поступает на приемные торцы OOB 18. Под действием деформации объекта на значение ε деформируются (растягиваются или сжимаются относительно продольной оси) стержни 2 и 3, которые жестко связаны с объектом деформации с помощью проушин 22. Шторка 11 перемещается относительно ООВ 18, что ведет к перекрытию части светового потока от ПОВ 6 и соответствующему изменению интенсивности световых потоков Ф1(ε) и Ф2(ε), поступающих далее по ООВ 18 на приемники излучения (например, фотодиоды) первого и второго измерительных каналов соответственно. Приемники излучения преобразуют оптические сигналы в электрические I1 и I2, поступающие на вход блока преобразования информации (БПИ). В БПИ осуществляется операция деления сигналов I1 и I2, что позволяет компенсировать изменения мощности излучения светодиода и неинформативные потери светового потока при изгибах оптических волокон, так как их отношение не зависит от указанных факторов. Для повышения чувствительности преобразования можно сформировать отношение разности сигналов I1 и I2 к их сумме: [I1(Х) - I2(Х)]/[ I1(Х)+ I2(Х)].
Таким образом, заявляемый технический результат в части улучшения метрологических и эксплуатационных характеристик, повышения герметичности и надежности конструкции датчика реализуется совокупностью указанных признаков изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ТЕМПЕРАТУРЫ | 2022 |
|
RU2795841C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК РАЗНОСТИ ДАВЛЕНИЯ | 2013 |
|
RU2567176C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2024 |
|
RU2829195C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК (ВАРИАНТЫ) | 2009 |
|
RU2393431C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ УРОВНЕМЕР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2399887C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ УРОВНЕМЕР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2564683C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ТОРЦЕВОЙ ДАТЧИК ДАВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 2012 |
|
RU2522791C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2290605C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2011 |
|
RU2474798C2 |
Изобретение относится к средствам измерения, контроля и диагностики. Волоконно-оптический датчик деформации включает подводящие и отводящие оптоволокна, между которыми размещена шторка с отверстием, два цилиндрических стержня, соосно по плотной посадке расположенные в цилиндрическом корпусе, шторка выполнена в выступе в центральной части первого стержня, второй стержень содержит выступ, в котором перпендикулярно продольной оси выполнено второе сквозное отверстие, а вдоль оси прорезь, с двух сторон которой в выступе соосно друг другу и соосно первому отверстию в шторке выполнены сквозные третье верхнее и четвертое нижнее отверстия, причем излучающий торец подводящего оптического волокна протянут через второе отверстие и закреплен с помощью первой втулки в третьем верхнем отверстии, а приемные торцы отводящих оптических волокон закреплены с помощью второй втулки в нижнем четвертом отверстии; вне зоны измерения все оптические волокна объединяются в волоконно-оптический кабель, герметично закрепленный в корпусе с помощью третьей втулки, которая с помощью сварки закреплена в пятом сквозном отверстии корпуса. Технический результат - измерение деформации крупногабаритных сооружений, улучшение метрологических и эксплуатационных характеристик, повышение герметичности и надежности, абсолютная искровзрывопожаробезопасность. 5 з.п. ф-лы, 4 ил.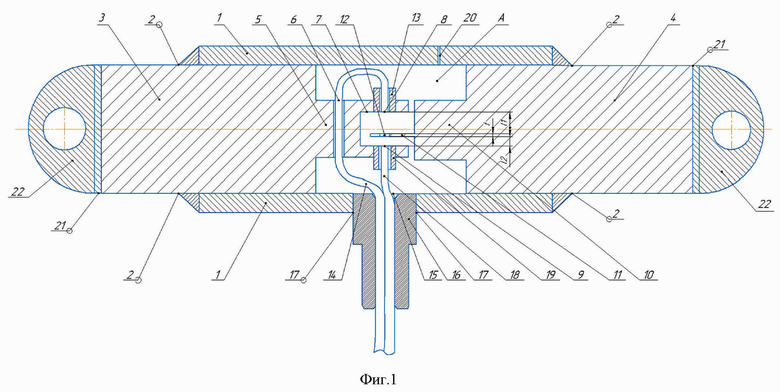
1. Волоконно-оптический датчик деформации, содержащий подводящие и отводящие оптические волокна, между которыми размещена шторка с отверстием, отличающийся тем, что в конструкцию введены два цилиндрических стержня, соосно по плотной посадке расположенные в цилиндрическом корпусе, шторка выполнена в выступе в центральной части первого стержня, второй стержень содержит выступ, в котором перпендикулярно продольной оси выполнено второе сквозное отверстие, а вдоль оси - прорезь, с двух сторон которой в выступе соосно друг другу и соосно первому отверстию в шторке выполнены сквозные третье верхнее и четвертое нижнее отверстия, причем излучающий торец подводящего оптического волокна протянут через второе отверстие и закреплен с помощью первой втулки в третьем верхнем отверстии, а приемные торцы отводящих оптических волокон закреплены с помощью второй втулки в нижнем четвертом отверстии; вне зоны измерения все оптические волокна объединяются в волоконно-оптический кабель, герметично закрепленный в корпусе с помощью третьей втулки, которая с помощью сварки закреплена в пятом сквозном отверстии корпуса.
2. Волоконно-оптический датчик по п. 1, отличающийся тем, что в корпусе выполнено запаиваемое сквозное технологическое отверстие для откачки воздуха из корпуса, а пространство между стержнями заполнено инертным газом.
3. Волоконно-оптический датчик по п. 1, отличающийся тем, что к внешним торцам стержней приварены проушины с отверстиями.
4. Волоконно-оптический датчик по п. 1, отличающийся тем, что на торцах стержней выполнены резьбы, на которых закреплены введенные в конструкцию две накидные гайки, внутри каждой из которых соосно стержню установлены верхние перекладины введенных в конструкцию хвостовиков в виде буквы «Т», по внешним контурам накидных гаек, соединенных со стержнями, выполнена сварка.
5. Волоконно-оптический датчик по п. 1, отличающийся тем, что на торцах каждого из стержней сделан цилиндрический выступ, диаметр которого меньше диаметра стержня и в котором выполнено поперечное сквозное отверстие, в конструкцию введены хвостовики в виде буквы «Т», в верхней перекладине которой выполнены поперечное сквозное отверстие и продольное отверстие, повторяющее формы и размеры цилиндрического выступа, причем хвостовики и стержни скреплены между собой с помощью штифтов, установленных в сквозные поперечные отверстия стержней и хвостовиков, и фиксирующей штифты в хвостовике сварки.
6. Волоконно-оптический датчик по п. 1, отличающийся тем, что к стержням с помощью точечной сварки приварен хвостовик в виде лестницы из двух ступеней, причем верхняя ступень имеет размеры и форму торца стержня, а нижняя ступень имеет несквозное отверстие, повторяющее контур и размеры объекта, к которому крепится с помощью контурной сварки датчик деформации.
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2290605C1 |
| 0 |
|
SU199237A1 | |
| 0 |
|
SU194195A1 | |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК (ВАРИАНТЫ) | 2009 |
|
RU2393431C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЕ ДАТЧИКИ ДАВЛЕНИЯ И СИСТЕМА ИЗМЕРЕНИЯ ДАВЛЕНИЯ, ИХ ВКЛЮЧАЮЩАЯ | 1998 |
|
RU2205374C2 |
| US 7839582 B2, 23.11.2010. | |||

