Изобретение относится к измерительной технике и может быть использовано для измерения угла наклона сооружений относительно горизонта, например, для определения углового положения ферм на стартовой площадке в ракетно-космической технике, для определения угловых перемещений деталей, рычагов управления и других элементов в условиях сильных электромагнитных помех, повышенных температур и больших загрязнений воздуха, в геодезии, строительстве, горном деле, в нефтяной и газовой промышленности при бурении скважин, в системах контроля и управления различными подвижными объектами, в приборах охранной сигнализации и сейсмоакустического контроля и пр.
Известен маятниковый датчик угла наклона, содержащий поперечный и боковые стержни, вторые концы которых неподвижно соединены с роторами соответствующих вращающихся трансформаторов, находящихся на площадке, установленной подвижно на оси подвеса датчика, вращающиеся трансформаторы установлены симметрично относительно оси датчика и на расстоянии друг от друга, обеспечивающем образование стержнями в точках их соединения параллелограмма, статор каждого вращающегося трансформатора скреплен соосно с шестерней и установлен с возможностью поворота относительно оси вращающегося трансформатора, на оси датчика наклона жестко установлена шестерня, входящая в зацепление с шестерней статора одного из вращающихся трансформаторов и через дополнительную шестерню с шестерней второго вращающегося трансформатора [RU 2500988 C1, G01C 9/12, 27.06.2012].
Недостатками данного устройства являются сложность аппаратурной реализации устройства, принцип работы датчика основан на механических и электрических связях, что существенно снижет надежность, помехозащищенность в условиях электромагнитных помех, искро-взрыво-пожаробезопасность.
Известен датчик угла наклона, содержащий ампулу, частично заполненную магнитной жидкостью, на которой размещены первичная обмотка и соединенные встречно-последовательно вторичные обмотки, ампула размещена в корпусе из магнитомягкой стали, расположенном в термоизолирующем кожухе, в котором установлены датчик температуры и нагреватель [RU 2440556 C1, G01C 9/06, 11.10.2010].
Недостатками данного устройства являются:
- хрупкость изделия;
- наличие магнитной жидкости исключает возможность использования вблизи электромагнитных устройств;
- принцип работы основан на электрической связи, что существенно снижет надежность, помехозащищенность в условиях электромагнитных помех, искро-взрыво-пожаробезопасность.
Известен маятниковый датчик угла наклона, содержащий маятник и два датчика угла, состоящие из статора и ротора, статоры датчиков углов соединены соосно с шестернями, оба датчика угла установлены на одной оси подвеса, жестко закрепленной в корпусе датчика, и их роторы жестко закреплены на этой оси, статор и шестерня одного датчика угла жестко соединены с маятником и установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, статор и шестерня другого датчика угла установлены с возможностью их совместного поворота вокруг оси подвеса относительно ротора этого датчика угла, шестерни, соединенные со статорами датчиков углов, находятся в зацеплении через четное количество промежуточных шестерен, выходные обмотки статоров датчиков углов соединены с возможностью суммирования их выходных сигналов [RU 2548397 C1, G01C 9/12, 29.01.2014].
Недостатками данного устройства являются сложность аппаратурной реализации устройства, принцип работы датчика основан на механических и электрических связях, что существенно снижет помехозащищенность в условиях электромагнитных помех, надежность, искро-взрыво-пожаробезопасность.
Известен датчик угла наклона сооружений, содержащий герметичный корпус, заполненный демпфирующей жидкостью, маятник, упругие элементы в виде дугообразных плоских пружин с низкоомными тензорезисторами, соединенные по мостовой схеме измерения, упругие элементы одним концом закреплены на корпусе, а другим - на плече коромысла, ось коромысла, установленная в подшипниках на корпусе, параллельна оси маятника [патент RU 2131112].
Недостатки датчика:
- сложность конструктивного исполнения, связанная с наличием дугообразных пружин;
- недостаточная чувствительность преобразования сигналов из-за малой деформации упругих элементов, ограничивающая диапазон измерения углов наклона (не более 5 градусов);
- принцип работы датчика основан на преобразовании электрических сигналов, что существенно снижает надежность, помехозащищенность в условиях электромагнитных помех, искро-взрыво-пожаробезопасность.
Известен компенсационный акселерометр с оптическим датчиком угла, содержащий корпус с расположенными в нем чувствительным элементом в виде маятника, состоящего из инерционной массы, выполненной в виде подвижной пластины, упруго прикрепленной к основанию чувствительного элемента, установленной на подвижной пластине катушки и экранирующего элемента, соединенного с подвижной пластиной с щелью, направленной вдоль оси маятника, датчиком угла, который состоит из источника света и дифференциального приемника света, расположенных друг против друга с размещением экранирующего элемента между ними, датчиком момента, включающим верхнюю и нижнюю магнитные системы, состоящие из внешних и внутренних магнитопроводов, постоянных кольцевых магнитов, диаметрально намагниченных вдоль оси маятника, и двух катушек, установленных на подвижной пластине маятника [патент на полезную модель №120235 U1, РФ]. Недостатки датчика:
- сложность конструктивного исполнения и большие габаритные размеры устройства, связанные с наличием магнитной и экранирующей систем;
- невысокий диапазон измерения датчика угла (не более 5 градусов), ограниченный конструкцией чувствительного элемента и магнитной системы;
- принцип работы датчика основан на преобразовании электрических сигналов, что существенно снижет надежность, помехозащищенность в условиях электромагнитных помех, искро-взрыво-пожаробезопасность.
Известен волоконно-оптический преобразователь углового перемещения, содержащий подводящий и отводящие оптические волокна, относительно общего торца которых на расстоянии Хо установлена перемещающаяся на угол а отражающая поверхность, неподвижная линия отражающей поверхности расположена относительно оптической оси подводящего оптического волокна на расчетном расстоянии, оптическая ось подводящего оптического волокна расположена относительно оптической оси отводящих оптических волокон на расчетном расстоянии [патент 2419765].
Недостаток указанного преобразователя в малом диапазоне измерения (не более 5 градусов).
Наиболее близком по конструктивному исполнению оптической системы измерительного преобразователя является волоконно-оптический преобразователь перемещения, содержащий соосно расположенные непрозрачную шторку с отверстием, жгуты подводящих и отводящих волокон, расстояния между оптическими волокнами и шторкой определяются выражением, приведенным в патенте, в приемном торце жгута отводящих волокон соосно с подводящим оптическим волокном и отверстием расположен отрезок технологического волокна, вокруг которого расположены приемные торцы отводящих оптических волокон, разделенные на две равные по количеству волокон группы, симметрично расположенные друг над другом в направлении перемещения шторки [пат. На изобретение РФ 2290605].
В результате поиска по источникам патентной и технической информации не обнаружены устройства с совокупностью существенных признаков, совпадающих с предлагаемым изобретением и обеспечивающих заявленный технический результат.
Техническим результатом предлагаемого изобретения являются:
- расширенный диапазон измерения угла наклона до 30 градусов при высокой чувствительности преобразования оптических сигналов;
- исключение поломки маятника при транспортировке датчика;
- высокая точность измерения угла наклона за счет возможной реализации дифференциального преобразования оптических сигналов непосредственно в зоне восприятия измерительной информации;
- повышение технологичности устройства за счет простоты конструкции (отсутствует сложная оптическая система и сложные процедуры юстировки);
обеспечение помехоустойчивости и искро-взрыво-пожаробезопасности.
Указанный технический результат достигается тем, что:
1 Волоконно-оптический маятниковый датчик угла наклона, содержащий корпус, размещенный внутри него маятник с грузом, закрепленный на вращающемся вале, подводящий и отводящие оптические волокна, между которыми размещена шторка с отверстием, отличается тем, что торцы вала закреплены в подшипниках, запрессованных в расточках вновь введенного внутреннего корпуса, неподвижно закрепленного в корпусе и внешний диаметр которого меньше внутреннего диаметра корпуса на значение  где
где  - внешний диаметр оптического волокна, шторка выполнена в центральной части вала, продольная ось вала находится в одной плоскости с оптической осью подводящего оптического волокна и центром шторки в нейтральном положении маятника и перпендикулярна оптическим осям оптических волокон.
- внешний диаметр оптического волокна, шторка выполнена в центральной части вала, продольная ось вала находится в одной плоскости с оптической осью подводящего оптического волокна и центром шторки в нейтральном положении маятника и перпендикулярна оптическим осям оптических волокон.
2 Волоконно-оптический маятниковый датчик угла наклона по п. 1 отличается тем, что в отверстии в шторке установлена шарообразная линза.
3 Волоконно-оптический маятниковый датчик угла наклона по п. 1 отличается тем, что в отверстии в шторке установлена цилиндрическая линза.
4 Волоконно-оптический маятниковый датчик угла наклона по п. 1 отличается тем, что в конструкцию введено жестко соединенное с корпусом донышко со сквозным резьбовым отверстием по центру, в котором установлен с возможностью перемещения фиксирующий винт, во впадине в верхней части донышка герметично установлена тонкая мембрана, повторяющая внешний контур впадины.
5 Волоконно-оптический маятниковый датчик угла наклона по п. 1 отличается тем, что в нижнем торце груза маятника выполнено резьбовое отверстие, в которое ввернут штифт.
6 Волоконно-оптический маятниковый датчик угла наклона по п. 1 отличается тем, что корпус выполнен герметичным и заполнен инертным газом.
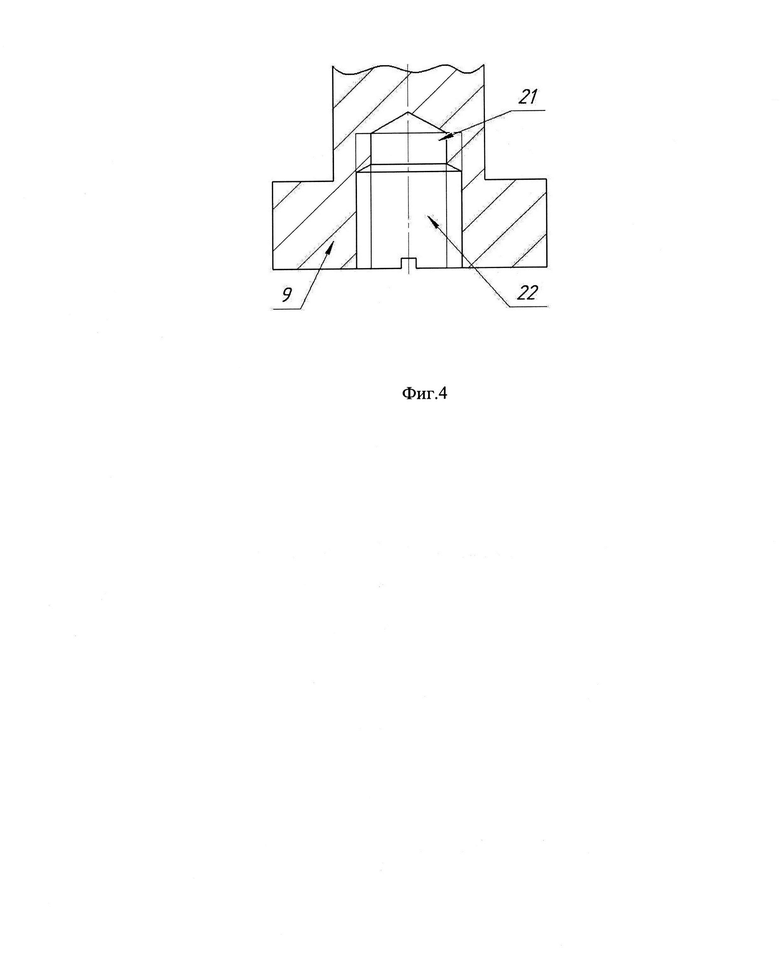
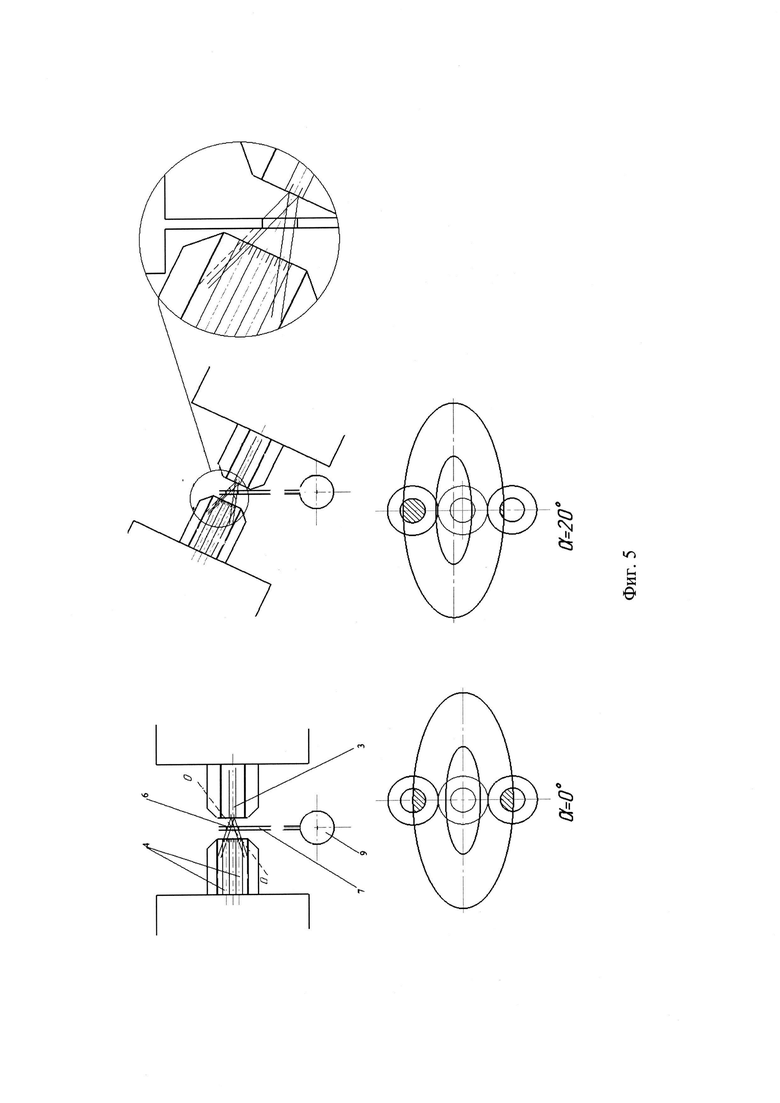
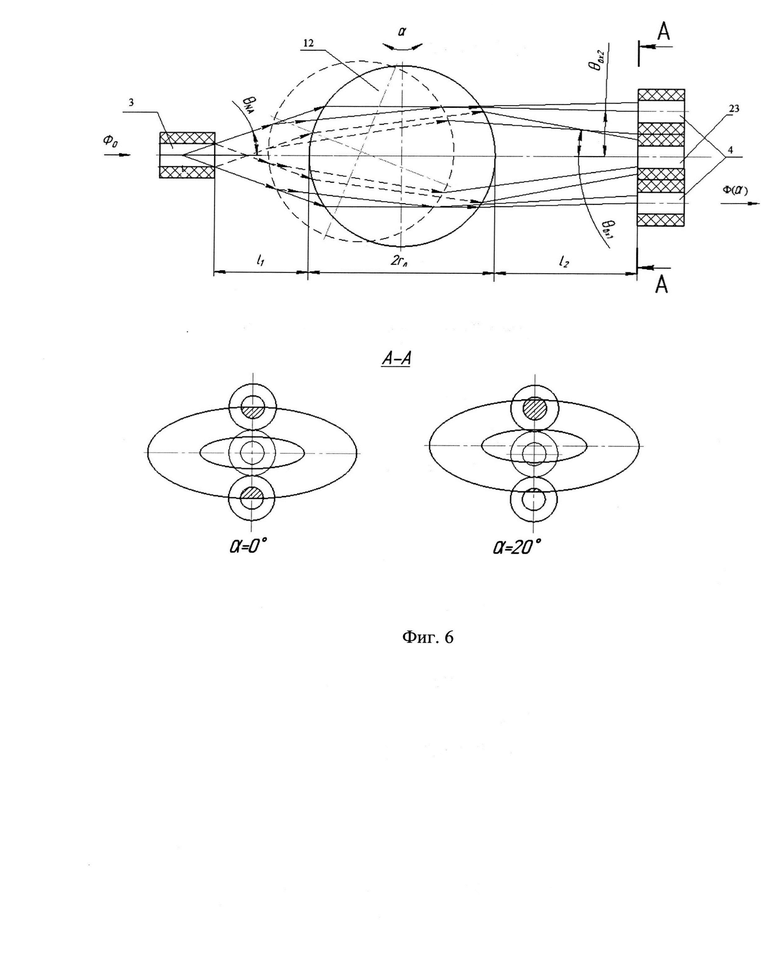
На фиг.1 приведен поперечный разрез волоконно-оптического датчика угла наклона (ВОДУН) аттенюаторного типа (шторка с круглым отверстием); на фиг.2 - упрощенная принципиальная схема устройства; на фиг.3 - конструкция механизма блокировки маятника при транспортировке; на фиг.4 - расположение штифта в грузе маятника; на фиг.5 - ход лучей в ВОДУН аттенюаторного типа, на фиг.6 - ход лучей в ВОДУН с линзой.
Датчик содержит корпус 1 (на фиг.1 верхняя часть корпуса 1 срезана для наглядности), в котором установлен блок измерительного преобразователя 2, представляющего собой совокупность микро-оптической и маятниковой систем (фиг.1).
Микро-оптическая система состоит из подводящего оптического волокна (ПОВ) 3, отводящих оптических волокон (ООВ) 4, между ПОВ 3 и ООВ 4 расположена непрозрачная шторка 5 с отверстием 6, центр которого совпадает с оптической осью ПОВ 3.
Маятниковая система состоит из маятника 7, закрепленного на валу 8. На нижнем конце маятника 7 прикреплен груз 9. Непрозрачная шторка 5 выполнена в центральной части вала 8. Верхний конец маятника 7 жестко закреплен на валу 8. Особенностью измерительного преобразователя 2 является то, что оптическая ось ПОВ 3 перпендикулярна продольной оси вала 8, причем эти оси находятся в одной плоскости. Торцы вала 8 запрессованы в подшипниках 10, жестко закрепленных во внутреннем корпусе 11 измерительного преобразователя 2.
Для повышения чувствительности преобразования оптического сигнала за счет фокусировки светового потока в отверстии 6 маятника 7 при необходимости можно установить или шарообразную или цилиндрическую линзу 12.
Датчик угла наклона работает следующим образом.
Световой поток Ф0, сформированный источником излучения - светодиодом 13 (см. фиг.2), по ПОВ 3 направляется в зону измерения, выходит под апертурным углом ΘNA на излучающем торце ПОВ 3 в виде конуса [Волоконно-оптические приборы и системы: Научные разработки НТЦ "Нанотехнологии волоконно-оптических систем" Пензенского государственного университета Ч. I / Т. И. Мурашкина, Е. А. Бадеева. СПб.: Политехника, 2018. 187 с. - с. 68], передается в направлении отверстия 6 (линзы 12) в шторке 5 (см. фиг.2).
В нейтральном положении световой поток Ф, прошедший через отверстие 6 (линзу 12), поступает на ООВ 4, по которым передается на приемники излучения 14 и 15 двух измерительных каналов, где преобразуется в электрические сигналы.
При изменении угла положения объекта, на котором закреплен датчик, корпус 1 меняет свое положение. При этом за счет груза 9 маятник 7 под действием сил гравитации сохраняет свое положение, но меняется угловое расположение ПОВ 3 и ООВ 4 относительно отверстия 6 или линзы 12 в шторке 5 (фиг.5, 6).
Оптические излучения Ф1(α) и Ф2(α), несущие измерительную информацию об угле наклона а объекта и прошедшие через отверстие 6 или линзу 12 (см. фиг 5 и 6), по ООВ 4 первого и второго измерительных каналов соответственно поступают на приемники излучения 14 и 15 соответствующих каналов (см. фиг.2). Приемники излучения преобразуют оптические сигналы Ф1(α) и Ф2(α) в электрические I1(α) и I2(α) соответственно. Данные сигналы поступают на вход электронного блока преобразования информации (на фигурах не показан), где происходит дальнейшее их преобразование, например, выполняется операция, соответствующая дифференциальному логометрическому преобразованию:

где k - коэффициент пропорциональности.
Установление причинно-следственной связи заявляемых признаков и достигаемого технического эффекта проведем следующим образом.
Расположение шторки 5 в центральной части вала 8 обеспечивает снижение требований к процедуре юстировки оптико-механической системы, повышению технологичности конструкции датчика.
Расположение подшипников 10 во внутреннем корпусе 11 датчика позволяет разместить ПОВ 3 в пространстве между основным 1 и внутренним 11 корпусами и далее загерметизировать конструкцию датчика. Расстояние L между внешней поверхностью внутреннего корпуса 11 и внутренней поверхностью основного корпуса 1 определяется выражением (2):

где  - внешний диаметр оптического волокна.
- внешний диаметр оптического волокна.
Такое соотношение определяется допустимым радиусом изгиба оптического волокна, не приводящим к его поломке [Оптика световодов/ В.Б. Вейнберг, Д.К. Саттаров. - Ленинград: Машиностроение, Ленингр. Отд-ние, 1977.- 320 с], а также необходимостью заполнения пространства между корпусами 1 и 11 герметиком для обеспечения неподвижности оптических волокон.
Для обеспечения безопасной транспортировки устройства предусмотрен механизм блокировки маятника 7, находящийся в донышке 16, состоящий из мембраны 17 и винта 18 (фиг.3). Донышко 16 жестко соединено с внутренним корпусом 11 (например, с помощью сварки).
Тонкая мембрана 17 герметично закреплена во впадине 19 в верхней части донышка 16, внешний контур мембраны 17 повторяет внешний контур впадины 19. Фиксирующий винт 18 установлен в сквозном резьбовом отверстии 20 по центру донышка 16 с возможность перемещения.
Такое конструктивное исполнение механизма блокировки обеспечивает герметичность всей конструкции датчика.
Для настройки маятниковой системы в нижней части груза 9 предусмотрено резьбовое отверстие 21, в которое при необходимости вворачивается винт 22 (фиг.4).
Для предотвращения образования конденсата на оптических элементах в полость корпуса 1 закачивается аргон. Также аргон выполняет роль среды для газодинамического демпфирования, что позволяет достичь коэффициента демпфирования, равного 0,73.
Применение двух ООВ 4 позволяет реализовать дифференциальное преобразование оптических сигналов, что снижает дополнительные погрешности от воздействия внешних влияющих факторов [Волоконно-оптические приборы и системы: Научные разработки НТЦ "Нанотехнологии волоконно-оптических систем" Пензенского государственного университета Ч. I/T. И. Мурашкина, Е. А. Бадеева. СПб.: Политехника, 2018. 187 с. - с. 87-91, Глава 5 https://doi.org/10.25960/7325-1132-11 (например, от изгибов оптических волокон, изменения мощности источника излучения 13 при изменении температуры и пр.).
В этом случае целесообразно сформировать функцию преобразования в виде отношения разности сигналов на выходе к их сумме (см. выражение (1)) с учетом того, что используются один источник излучения 13 и два приемника излучения 14 и 15 одного типа.
Расположение ООВ 4 или вертикально друг над другом, или с некоторым смещением по окружности в плоскости расположения ООВ необходимо для обеспечения равенства сигналов в двух измерительных каналах и повышения чувствительности преобразования оптического сигнала. Возможность расположения ООВ 4 с некоторым допустимым смещением по окружности снижает требования к процедуре юстировки.
Для упрощения процедуры сборки между ООВ 4 можно расположить отрезок технологического волокна 23 или втулку, диаметром, совпадающим с диаметром оптических волокон или, при необходимости, других размеров (см. фиг.2).
Совокупность признаков приводит к достижению технического результата предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК РАЗНОСТИ ДАВЛЕНИЯ | 2013 |
|
RU2567176C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДЕФОРМАЦИИ | 2022 |
|
RU2786690C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ПРЕЛОМЛЕНИЯ ПРОЗРАЧНОГО ВЕЩЕСТВА И РЕАЛИЗУЮЩИЙ ЕГО ВОЛОКОННО-ОПТИЧЕСКИЙ РЕФРАКТОМЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2021 |
|
RU2796797C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2290605C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2308677C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2005 |
|
RU2308689C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ И КОНФИГУРАЦИИ НЁБА И ВОЛОКОННО-ОПТИЧЕСКИЙ СКАНЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2803485C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2024 |
|
RU2829195C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ СВЕТОВОГО ПОТОКА И РЕАЛИЗУЮЩИЙ ЕГО ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2020 |
|
RU2740538C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 2007 |
|
RU2338155C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения угла наклона сооружений относительно горизонта. Волоконно-оптический маятниковый датчик угла наклона содержит корпус, размещенный внутри него маятник с инерционной массой, закрепленный на вращающемся вале, подводящий и отводящие оптические волокна, между которыми размещена шторка с отверстием. При этом торцы вала закреплены в подшипниках, запрессованных в расточках вновь введенного внутреннего корпуса, неподвижно закрепленного в корпусе и внешний диаметр которого меньше внутреннего диаметра корпуса на значение (1…10)dOB, где dOB - внешний диаметр оптического волокна, шторка выполнена в центральной части вала, продольная ось вала находится в одной плоскости с оптической осью подводящего оптического волокна и центром шторки в нейтральном положении маятника и перпендикулярна оптическим осям оптических волокон. Технический результат – расширение диапазона измерения угла наклона до 30 градусов при высокой чувствительности преобразования оптических сигналов. 5 з.п. ф-лы, 6 ил.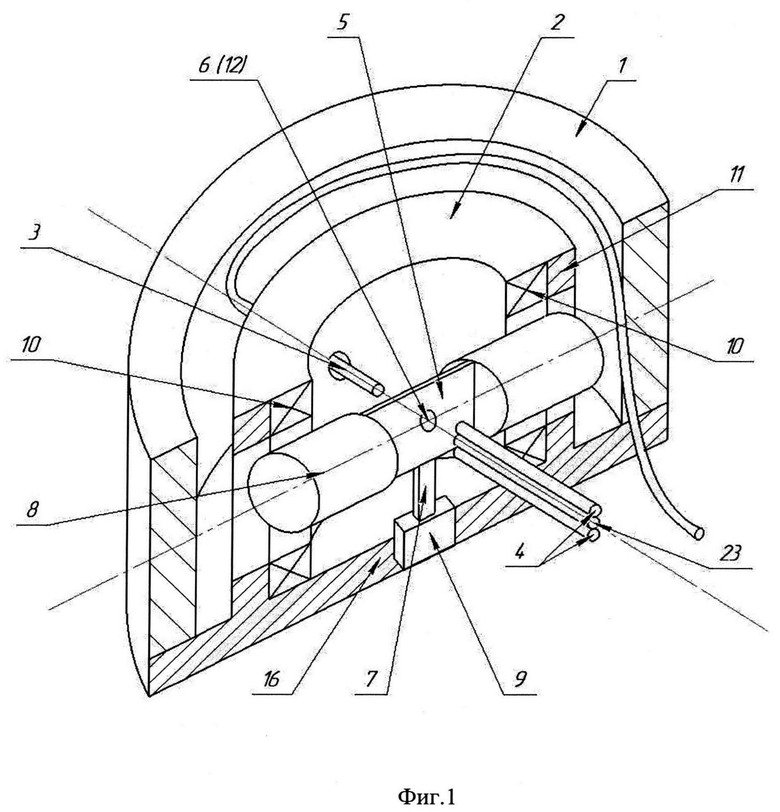
1. Волоконно-оптический маятниковый датчик угла наклона, содержащий корпус, размещенный внутри него маятник с инерционной массой, закрепленный на вращающемся вале, подводящий и отводящие оптические волокна, между которыми размещена шторка с отверстием, отличающийся тем, что торцы вала закреплены в подшипниках, запрессованных в расточках вновь введенного внутреннего корпуса, неподвижно закрепленного в корпусе и внешний диаметр которого меньше внутреннего диаметра корпуса на значение (1…10)dOB, где dOB - внешний диаметр оптического волокна, шторка выполнена в центральной части вала, продольная ось вала находится в одной плоскости с оптической осью подводящего оптического волокна и центром шторки в нейтральном положении маятника и перпендикулярна оптическим осям оптических волокон.
2. Волоконно-оптический маятниковый датчик угла наклона по п. 1, отличающийся тем, что в отверстии в шторке установлена шарообразная линза.
3. Волоконно-оптический маятниковый датчик угла наклона по п. 1, отличающийся тем, что в отверстии в шторке установлена цилиндрическая линза.
4. Волоконно-оптический маятниковый датчик угла наклона по п. 1, отличающийся тем, что в конструкцию введено жестко соединенное с корпусом донышко со сквозным резьбовым отверстием по центру, в котором установлен с возможностью перемещения фиксирующий винт, во впадине в верхней части донышка герметично установлена тонкая мембрана, повторяющая внешний контур впадины.
5. Волоконно-оптический маятниковый датчик угла наклона по п. 1, отличающийся тем, что в нижней части маятника выполнено резьбовое отверстие, в которое ввернут штифт.
6. Волоконно-оптический маятниковый датчик угла наклона по п. 1, отличающийся тем, что корпус выполнен герметичным и заполнен инертным газом.
| статья "Разработка волоконно-оптического датчика угла наклона" в журнале "Вестник Пензенского государственного университета", А.Н | |||
| Кукушкин, номер 3 2021 год, страницы 89-94 | |||
| 0 |
|
SU158229A1 | |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ МАЯТНИКОВЫЙ ДАТЧИК УРОВНЯ | 2011 |
|
RU2478186C1 |
| Способ контроля массового выхода пены и датчик для его осуществления | 2023 |
|
RU2817589C1 |
