Изобретение относится к технологиям неразрушающего контроля, а именно измерительной эндоскопии, и может быть использовано для получения и анализа трехмерного пространственного распределения деформаций поверхности труднодоступных объектов.
Известен способ бесконтактного измерения деформаций поверхностей с помощью метода цифровой корреляции изображений, основанный на вычислении пространственного распределения векторов смещения между двумя или несколькими изображениями, полученными в различные моменты времени. Данный способ реализуют с помощью двух и более систем машинного зрения, синхронно регистрирующих изображения исследуемого объекта. Совместная обработка последовательности изображений позволяет сравнить изображения, полученные в разные моменты времени, и вычислить трехмерное пространственное распределение деформаций поверхности объекта, произошедшее за время между кадрами [СА 2843892 A1, System And Method For Remote Full Field Three-Dimensional Displacement And Strain Measurements, 2012].
Недостатком данного способа является ограниченная область применения из-за сложности и больших габаритов систем машинного зрения, затрудняющих его применение для труднодоступных объектов.
Известен способ бесконтактного измерения деформаций поверхностей труднодоступных объектов с использованием видеоэндоскопических систем [P.L. Reu. Digital image correlation through a rigid borescope. In: Optical Measurements, Modeling, and Metrology, V. 5. P. 141-145. NY: Springer, 2011], согласно которому видеоэндоскопом получают последовательность двумерных изображений поверхности объекта в различные моменты времени и анализируют полученные изображения с использованием заданных алгоритмов анализа видеоданных.
Недостатком данного технического решения является ограниченная область применения из-за возможности измерения деформаций только плоских двумерных поверхностей.
Наиболее близким по технической сущности к предлагаемому изобретению является способ, основанный на регистрации изображений с помощью жесткого эндоскопического зонда [Н. Tang, К. Pooladvand, P. Razavi, J. J. Rosowski, J. Т. Cheng, С.Furlong. High-Speed Digital Image Correlation for Endoscopy: A Feasibility Study. // Advancement of Optical Methods & Digital Image Correlation in Experimental Mechanics, V. 3, Conference Proceedings of the Society for Experimental Mechanics Series]. Способ основан на использовании широкополосного источника излучения эндоскопического зонда для освещения исследуемой поверхности. Расположенная внутри зонда и дополненная заокулярным объективом оптическая система способствует дальнейшему формированию из излучения, отраженного и рассеянного поверхностью, последовательной серии изображений поверхности на матричном приемнике скоростной видеокамеры. Регистрация и обработка серии эндоскопических изображений поверхности, полученных с заданным шагом по времени, обеспечивает измерение распределения деформаций поверхности труднодоступных объектов.
Недостатками данного способа является отсутствие возможности анализа объектов сложной формы и получения трехмерного пространственного распределения деформаций контролируемых поверхностей. Это существенно ограничивает применение этого решения для анализа поверхности большинства реальных объектов.
Технической задачей предлагаемого изобретения является бесконтактное получение и анализ трехмерного пространственного распределения деформаций поверхности труднодоступных объектов со сложной формой поверхности.
Техническим результатом изобретения является выявление распределения деформаций поверхности труднодоступных объектов сложной формы.
Это достигается тем, что в способе получения трехмерного пространственного распределения деформаций поверхности труднодоступных объектов, который заключается в освещении исследуемой поверхности излучением, распространяющимся от дистального конца эндоскопического зонда, формировании из отраженного и рассеянного исследуемой поверхностью излучения последовательности изображений в заданные моменты времени на матричном приемнике, согласно изобретению перед проведением исследования поверхности проводят предварительную геометрическую калибровку стереоскопической оптической системы, используют эндоскопический зонд со встроенной стереоскопической оптической системой, расположенной на его дистальном конце, с помощью которой формируют и последовательно регистрируют пары изображений исследуемой поверхности, полученные с различных ракурсов, вычисляют на основе совместной обработки пар изображений трехмерное изображение поверхности в заданный момент времени и, обрабатывая последовательность таких пар изображений с использованием данных предварительной геометрической калибровки стереоскопической оптической системы, проводят измерение и анализ трехмерного пространственного распределения деформаций исследуемой поверхности.
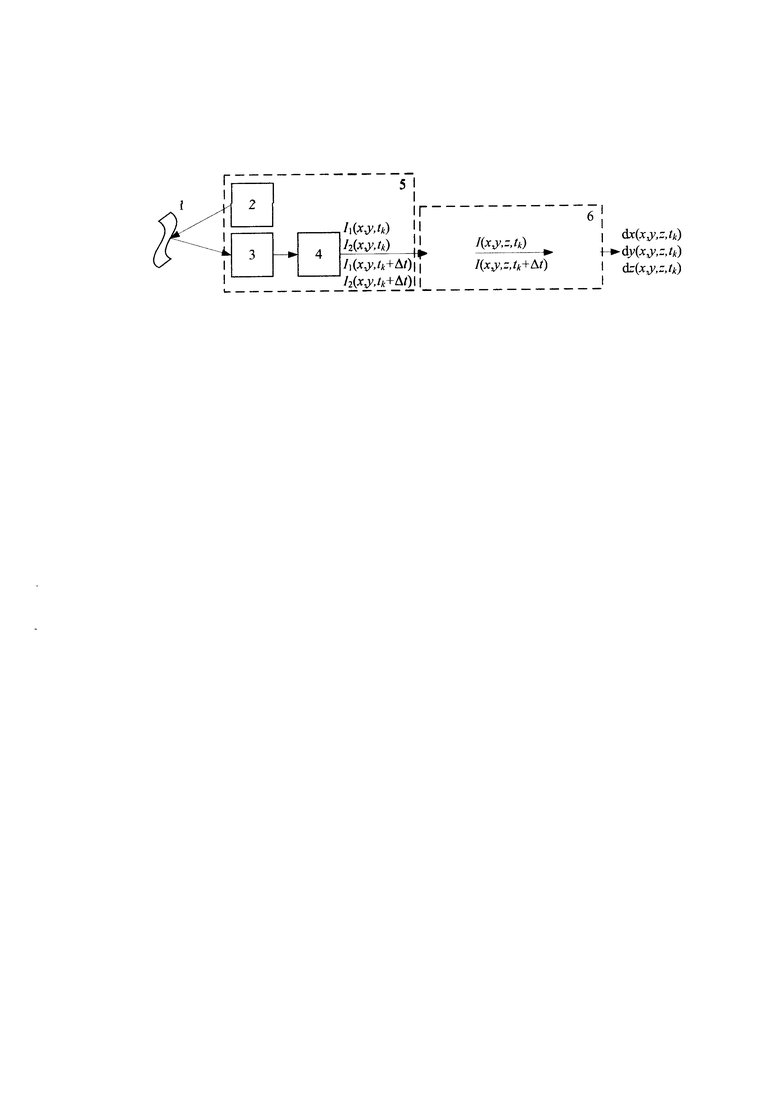
Сущность изобретения поясняется чертежом, на котором показана структурная схема устройства, реализующего способ получения трехмерного пространственного распределения деформаций поверхности сложной формы труднодоступных объектов.
Структурная схема содержит исследуемую поверхность 1, эндоскопический зонд 2, включающий в себя источник излучения 3, стереоскопическую оптическую систему 4, матричный приемник излучения 5, блок 6 регистрации, обработки и хранения данных.
Устройство, реализующее способ получения трехмерного пространственного распределения деформаций поверхности труднодоступных объектов, работает следующим образом.
С помощью устройства обеспечивают освещение исследуемой поверхности 1 излучением, распространяющимся от дистального конца эндоскопического зонда 2, формирование изображения исследуемой поверхности 1 из отраженного и рассеянного излучения на матричном приемнике излучения 5 с помощью стереоскопической оптической системы 4, расположенной на дистальном конце эндоскопического зонда 2, обработку серии изображений поверхности 1, полученных с заданным шагом по времени с помощью блока 6 регистрации, обработки и хранения данных.
Способ получения трехмерного пространственного распределения деформаций поверхности труднодоступных объектов осуществляют следующим образом.
Перед проведением исследования поверхности 1 проводят предварительную геометрическую калибровку стереоскопической оптической системы 4. В ходе калибровки стереоскопической оптической системы 4 совместно с матричным приемником излучения 5 проводят регистрацию изображений тест-объекта с контрастно нанесенными на него метками (маркерами), координаты которых известны с высокой точностью. Обрабатывая серии таких изображений, рассчитывают внутренние параметры каждого из каналов стереоскопической оптической системы 4 и параметры их взаимного ориентирования, которые в дальнейшем используют для вычисления формы поверхности.
После завершения геометрической калибровки стереоскопической оптической системы 4 проводят исследование поверхности 1 объекта. Для этого эндоскопический зонд 2 устанавливают неподвижно так, что в поле зрения стереоскопической оптической системы 4 находится исследуемая поверхность 1. Матричный приемник излучения 5 формирует одновременно два изображения I1(x,y,tk) и h(x,y,tk) исследуемой поверхности 1, полученные с различных ракурсов стереоскопической оптической системой 4. Сигнал с матричного приемника излучения 5 поступает в блок 6 регистрации, обработки и хранения данных, находящийся на выходе (проксимальной части) эндоскопического зонда 2. Блоком 6 регистрации, обработки и хранения данных осуществляют обработку пары полученных изображений с использованием данных предварительной геометрической калибровки, по результатам которой вычисляют трехмерное изображение поверхности 1 (x,y,z,tk) по исследуемой поверхности 1 z(x,y) в заданный момент времени. Обработкой последовательных серий таких пар изображений, полученных в моменты времени tk с заданным шагом по времени Δt=tk+1-tk, обеспечивают измерение и анализ трехмерного пространственного распределения деформаций dx(x,y,z,tk), dy(x,y,x,tk) и dz(x,y,z,tk) по поверхности z(x,y,z) труднодоступных объектов.
Параметры и характеристики источника излучения 3 (мощность, спектр излучения и пр.), стереоскопической оптической системы 4 (угловое поле, ближняя и дальняя граница резко изображаемого пространства, пространственное разрешение, степень аберрационной коррекции и пр.) и матричного приемника излучения 5 (быстродействие, размеры и количество чувствительных элементов, уровень шумов и пр.) рассчитывают и/или подбирают так, чтобы обеспечить оптимальные условия получения трехмерного изображения исследуемой поверхности 1 максимально высокого качества (максимально высокого пространственного разрешения, отношения сигнал/шум и пр.) с учетом геометрических и физических свойств объекта контроля.
Использование изобретения позволяет выявлять трехмерное пространственное распределение деформаций поверхности труднодоступных объектов со сложной формой поверхности, бесконтактно получая и анализируя такое распределение деформаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГЕОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ, ПРОВОДИМЫХ С ПОМОЩЬЮ СТЕРЕОСКОПИЧЕСКОГО УСТРОЙСТВА НА ОСНОВЕ ПРИЗМЕННО-ЛИНЗОВОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2693532C1 |
| Триангуляционный метод измерения площади участков поверхности внутренних полостей объектов известной формы | 2017 |
|
RU2655479C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭНДОСКОПА | 2007 |
|
RU2337606C1 |
| Способ и устройство регистрации пространственного распределения оптических характеристик труднодоступных объектов | 2017 |
|
RU2655472C1 |
| СПОСОБ ВЫБОРА ПОТОКОНАПРАВЛЯЮЩЕГО СТЕНТА | 2016 |
|
RU2636189C2 |
| Способ подавления встречной засветки при формировании изображений дорожного окружения перед транспортным средством и устройство для осуществления способа | 2020 |
|
RU2746614C1 |
| МНОГОКАНАЛЬНЫЙ ОПТОВОЛОКОННЫЙ НЕЙРОИНТЕРФЕЙС ДЛЯ МУЛЬТИМОДАЛЬНОЙ МИКРОСКОПИИ МОЗГА ЖИВОТНЫХ | 2014 |
|
RU2584922C1 |
| Способ получения структурных изображений в эндоскопической оптической когерентной томографии | 2017 |
|
RU2679947C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ В КАРДИОХИРУРГИИ | 2015 |
|
RU2607948C2 |
| УСТРОЙСТВО СТЕРЕОВИДЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ | 2011 |
|
RU2474973C2 |
Изобретение относится к технологиям неразрушающего контроля, а именно измерительной эндоскопии, и может быть использовано для получения и анализа трехмерного пространственного распределения деформаций поверхности труднодоступных объектов. Заявленный способ получения трехмерного пространственного распределения деформаций поверхности труднодоступных объектов заключается в освещении исследуемой поверхности излучением, распространяющимся от дистального конца эндоскопического зонда, формировании из отраженного и рассеянного исследуемой поверхностью излучения последовательности изображений в заданные моменты времени на матричном приемнике. Перед проведением исследования поверхности проводят предварительную геометрическую калибровку стереоскопической оптической системы, используют эндоскопический зонд со встроенной стереоскопической оптической системой, расположенной на его дистальном конце, с помощью которой формируют и последовательно регистрируют пары изображений исследуемой поверхности, полученные с различных ракурсов, вычисляют на основе совместной обработки пар изображений трехмерное изображение поверхности в заданный момент времени и, обрабатывая последовательность таких пар изображений с использованием данных предварительной геометрической калибровки стереоскопической оптической системы, проводят измерение и анализ трехмерного пространственного распределения деформаций исследуемой поверхности. Технический результат - возможность выявления распределения деформаций поверхности труднодоступного объекта сложной формы. 1 ил.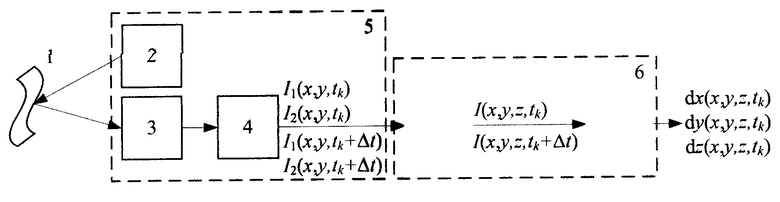
Способ получения трехмерного пространственного распределения деформаций поверхности труднодоступных объектов, заключающийся в освещении исследуемой поверхности излучением, распространяющимся от дистального конца эндоскопического зонда, формировании из отраженного и рассеянного исследуемой поверхностью излучения последовательности изображений в заданные моменты времени на матричном приемнике, отличающийся тем, что перед проведением исследования поверхности проводят предварительную геометрическую калибровку стереоскопической оптической системы, используют эндоскопический зонд со встроенной стереоскопической оптической системой, расположенной на его дистальном конце, с помощью которой формируют и последовательно регистрируют пары изображений исследуемой поверхности, полученные с различных ракурсов, вычисляют на основе совместной обработки пар изображений трехмерное изображение поверхности в заданный момент времени и, обрабатывая последовательность таких пар изображений с использованием данных предварительной геометрической калибровки стереоскопической оптической системы, проводят измерение и анализ трехмерного пространственного распределения деформаций исследуемой поверхности.
| Н | |||
| Tang, K | |||
| Pooladvand, P | |||
| Razavi, J.J | |||
| Rosowski, J.Т | |||
| Cheng, С | |||
| Furlong | |||
| High-Speed Digital Image Correlation for Endoscopy: A Feasibility Study | |||
| // Advancement of Optical Methods & Digital Image Correlation in Experimental Mechanics, V | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТРЕХМЕРНОЙ ФОРМЫ ОБЪЕКТОВ | 2012 |
|
RU2491503C1 |
| WO | |||

