Способ распознавания информационно-измерительной техники и может быть использован для дистанционного распознавания и измерения формы объектов.
Известен способ бесконтактного измерения трехмерных объектов, который заключается в проецировании плоского луча света на измеряемую поверхность яркой контрастной линии, регистрации ее с помощью цифрового фоторегистрирующего устройства, передаче изображения этой линии на вычислительное устройство, определении вычислительным устройством рельефа измеряемой поверхности в плоскости луча по величине искривления линии. При этом плоский луч неподвижен относительно фоторегистрирующего устройства, а сканирование его по всем сечениям измеряемой поверхности осуществляют ручным перемещением фоторегистрирующего устройства (патент РФ №2365876, кл. G01B 11/24, 2007 г., 27.08.2009 г.).
Недостатком данного способа является необходимость наличия опорных линий, которые должны быть неподвижны относительно измеряемого объекта. Помимо этого на точность результатов измерения влияет угол проецирования полосы света и угол регистрации.
Также известен способ бесконтактного контроля линейных размеров трехмерных объектов (патент РФ №2334195, кл. G01B 11/24, 29.05.2006 г.). Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с увеличением пространственной модуляцией интенсивности пучка оптического излучения, а также последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки. Для каждой точки контролируемого объекта определяют зависимость интенсивности зарегистрированного излучения от номера изображения. Используют полученные калибровкой калибровочной поверхности зависимости интенсивности зарегистрированного излучения от номера изображения для калибровочной поверхности определенной как базовая. Для определения высоты рельефа поверхности контролируемого объекта определяют расстояние от базовой поверхности до точки калибровочной поверхности, в которой зависимость интенсивности зарегистрированного излучения от номера изображения в наибольшей степени подобна зависимости в исследуемой точке контролируемого объекта.
Недостатками данного способа являются: 1) необходимость регистрировать более двух изображений структуры подсветки; 2) необходимость в обеспечении модуляции подсветки и зависимости расположения активного канала от регистрирующего канала.
Наиболее близкий, по сути к достигаемому результату, является выбранный в качестве прототипа способ получения трехмерного изображения объекта (Н.Н. Красильников, О.И. Красильникова «Получение трехмерного изображения объекта путем измерения интенсивности диффузного отражения света различными точками его поверхности», Оптический журнал, 2010 г., том 77, №6). Способ заключается в освещении поверхности объекта оптическим излучением из трех направлений пространства, приеме диффузно отраженного излучения элементов поверхности объекта, определении углового положения нормали к диффузно отражающей поверхности в каждой ее точке и построении поверхности видимой части объекта из трех направлений.
Недостатком данного способа является тот факт, что он справедлив только для диффузно отражающих объектов и его нельзя использовать для объектов с направленно-рассеивающим покрытием, которые на практике наиболее часто имеют место, по сравнению с объектами, имеющих диффузное покрытие.
Задачей, на решение которой направлении заявленный способ, является распознавание трехмерной формы объектов как с диффузным, так и с направленно-рассеивающим покрытием.
Технический результат, достигаемый при решении поставленной задачи, заключается в создании способа распознавания трехмерной формы объектов, устойчивого к различиям типа покрытия и расширении информативности каналов оптических и оптико-электронных систем распознавания трехмерных объектов.
На фигуре 1 приведена геометрия освещения и наблюдения элемента поверхности объекта, координаты его нормали и направлений освещения и наблюдения.
Для представления сути предлагаемого способа распознавания трехмерной формы объектов как с диффузным, так и с направленно-рассеивающим покрытием, рассмотрим теорию способа.
Рассмотрим произвольный элемент dA поверхности объекта в декартовой системе координат XYZ и допустим, что его нормаль n составляет углы Θ и φ соостветственно с осями OZ и ОХ. Эти углы и определяют ориентацию элемента dA в трехмерном пространстве. Направление источника освещения элемента dA определяется вектором r0, a направление, из которого визируется этот элемент, вектором rн. Сферические координаты этих направлений соответственно равны (Θо, φо) и (Θн, Θн) (фиг.1).
В общем случае угол между векторами ro и n равен αо, а между векторами rн и n αн.
На основании работы (Тымкул В.М., Тымкул Л.В., Кудряшов К.В. Отражение оптического излучения телами с направленно-рассеивающим покрытием. Известия ВУЗов «Приборостроение», 2007 г., Т.50, №10, С.58-64) сила отраженного излучения элементом dA равна выражению:

где Е - освещенность элемента dA, которая формируется источником коллимированного излучения; β(αн, αо) - индикатриса яркости отражения элемента dA с произвольным покрытием.
На основании выражения (1), яркость отраженного излучения элемента dA равна:

Представим индикатрису яркости отражения в виде:

где βо - коэффициент яркости элемента dA в направлении зеркального отражения; α - угол между направлениями зеркального отражения и наблюдателя; m - параметр, зависящий от характера рассеяния покрытия элемента dA (m≥0; при m=0 отражение является ламбертовьм, а при m>0 отражение носит направленно-рассеивающий характер).
Следует отметить, что значение cos2m α равно:

На основании (2) и (4) выражение для сигнала, который формируется отраженным излучением элемента dA поверхности объекта можно представить в виде:

где Aвх и ω - площадь входного зрачка и мгновенный угол поля зрения измерительной системы; S - чувствительность приемника излучения измерительной системы.
Рассмотрим два варианта освещения и наблюдения объекта:
1) 
2) 
где i, k - единичные вектора, соответственно, направлений осей OX и OZ.
В свою очередь вектор нормали n согласно фиг.1 можно представить в виде:

Для направленно-рассеивающего покрытия элемента dA поверхности объекта m=0,5.
На основании выражений cosαO=(n,rO) и cosαH=(n,rH) и формул (6)-(8) имеем:
1) 
2) 
В конечном счете, на основании (5), (9) и (10) для обоих вариантов освещения и наблюдения элемента dA, величины нормированных сигналов равны:


Решая данную систему уравнений, получаем:


В конечном итоге, координаты у и z элементов наблюдаемой поверхности объекта определяют по двумерной картине объекта в плоскости изображения yoz с учетом масштаба изображения, третью координату x внутри контура изображения определяют выражениями:


где K, N - номера строк и элементов строки, для которых измеряется третья координата x в изображении поверхности объекта; Δy, Δz - шаг сканирования поверхности объекта соответственно вдоль координат OY и OZ.
Способ включает освещение поверхности объекта оптическим излучением, прием и регистрацию яркости отраженного оптического излучения элементов его поверхности, преобразование оптического излучения в электрический сигнал с последующим его запоминанием и анализом. В способе используют освещение поверхности объекта коллимированными пучками оптического излучения с двух взаимно перпендикулярных направлений. Форму объекта определяют по выражениям, указанным в формуле изобретения и включающим величины видеосигналов в изображении элементов поверхности объекта с двух взаимно ортогональных направлений и наблюдении с направления, совпадающего с одним из направлений освещения; номера строк и элементов строки, для которых измеряется третья координата в изображении поверхности объекта, шаг сканирования поверхности объекта соответственно вдоль координат OY и OZ. Технический результат - устойчивость к различиям типам покрытия за счет распознавания объектов как с диффузным, так и с направленно-рассеивающим покрытием, и расширение информативности каналов оптических и оптико-электронных систем распознавания. 1 ил.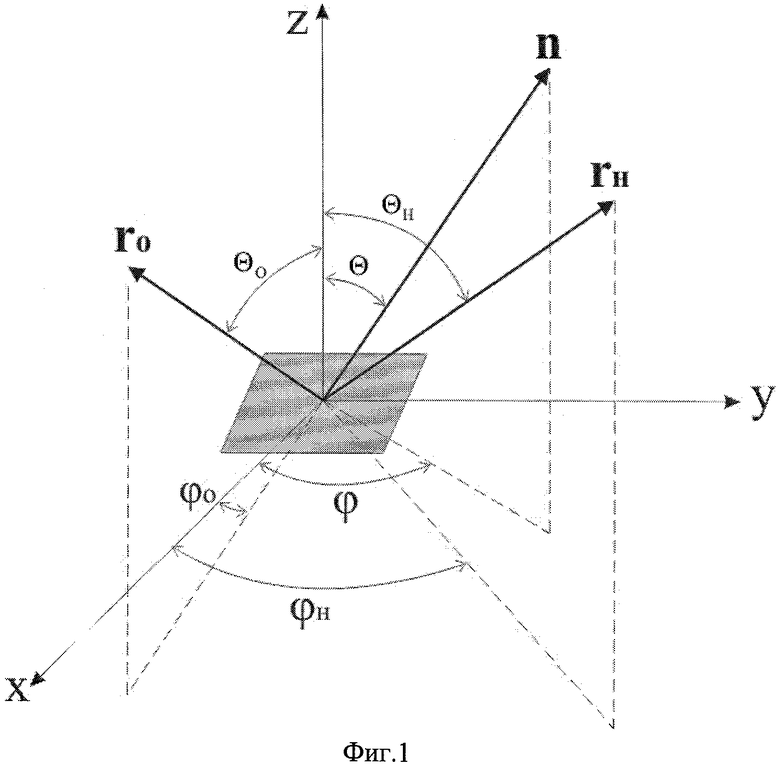
Способ распознавания трехмерной формы объектов, при котором освещают поверхность объекта оптическим излучением, производят прием и регистрацию яркости отраженного оптического излучения элементов его поверхности, преобразуют оптическое излучение в электрический сигнал с последующим запоминанием и анализом электрического сигнала, формируют оптическое изображение объекта, отличающийся тем, что используют освещение поверхности объекта коллимированными пучками оптического излучения с двух взаимно перпендикулярных направлений, а форму объекта внутри контура определяют выражениями:
x(N,K)|z=const=x(N-1,K)+Δy(N,K)·tgφ;
x(N,K)|y=const=x(N,K-1)+Δz(N,K)·tgΘ;
где 

U1 и U2 - величины видеосигналов в изображении элементов поверхности объекта с двух взаимно ортогональных направлений и наблюдении с направления, совпадающего с одним из направлений освещения; К, N - номера строк и элементов строки, для которых измеряется третья координата х в изображении поверхности объекта; Δy, Δz - шаг сканирования поверхности объекта соответственно вдоль координат OY и OZ.
| Красильников Н.Н., Красильникова О.И | |||
| Получение трехмерного изображения объекта путем измерения интенсивности диффузного отражения света различными точками его поверхности | |||
| - Оптический журнал, 2010, т.77, №6 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1994 |
|
RU2085839C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| JP 2007113974 A, 10.05.2007. | |||

