Настоящее изобретение относится к области аналитического приборостроения, более конкретно - к системам и способам формирования изображений объектов флуоресценции, в частности, к системам и способам, используемым для установления методом секвенирования первичной структуры молекул ДНК, выделенных из биологических образцов, в частности, из крови и ткани пациентов, с целью обеспечения потребностей медицины и медико-биологических научных исследований, а также для санитарного, экологического и криминалистического контроля.
Основной технологией для установления первичной структуры молекул ДНК является секвенирование, в результате применения которой определяются последовательности нуклеотидов. Одним из основных методов секвенирования является метод массового параллельного секвенирования ДНК путем синтеза. Этот метод осуществляется путем удлинения комплементарных цепей фрагментов нуклеиновых кислот путем синтеза и позволяет анализировать единовременно сразу множество участков генома, что является главным отличием от более ранних методов секвенирования.
Первоначально посредством мостиковой ПЦР на одной или двух поверхностях проточной ячейки формируются кластеры одноцепочечных клональных фрагментов ДНК. При каждом цикле секвенирования в проточную ячейку поступают реагенты, которые достраивают одноцепочечную ДНК одним комплементарным модифицированным дезоксирибонуклеозидтрифосфатом, имеющим уникальную флуоресцентную метку.
После выполнения каждого цикла получают изображения объектов флуоресценции, флуоресцентных меток образцов, с высоким разрешением посредством оптического блока, представляющего собой систему формирования изображения на базе флуоресцентного микроскопа с устройством фокусировки. При этом для получения изображений на всей длине реакционной ячейки необходима серия таких фотографий с каждой поверхности проточной ячейки. Каждая такая фотография называется полем зрения.
Для отображения анализируемых объектов с оптимальной резкостью изображений необходимо достижение совпадения плоскости сопряжённого фокуса с плоскостью исследуемой поверхности, особенно если речь идет об объектах субмикронного размера. Обычно системы формирования изображения перед использованием калибруются по фокальной плоскости. Однако эта калибровка может быть недостаточной, так как значения фокусного расстояния по всем полям зрения различны вследствие наклона поверхности проточной ячейки и необходимости определения оптимального значения фокусного расстояния для каждого поля зрения. Задержка времени секвенирования, связанная с достижением оптимального значения фокусного расстояния, влияет на скорость получения изображения различных полей зрения в проточной ячейке и на продолжительность анализа секвенирования в целом. Поэтому существует необходимость быстрого определения оптимальных значений фокусного расстояния по всем полям зрения.
Известен патент на изобретение «Automatic focusing of biomedical specimens apparatus» (Аппарат автоматической фокусировки биомедицинских образцов, патент США № US 5647025 A, 1997 г.), в котором предложено определять наилучшее фокусное расстояние на основе параметров качества изображения, таких как яркость, контрастность, размер, форма, текстура и др., вычисленных для серии изображений с различным фокусным расстоянием. Такой метод не обладает высокой производительностью процесса фокусировки, поскольку параметры качества изображения измеряются непосредственно по каждому фактическому изображению.
В патенте на изобретение «Autofocus method» (Метод автоматической фокусировки, патент США № US 8508652 B2, 2013 г.) предлагается на основе серии изображений с разным положением фокуса определять ширину размытия с целью оценки степени расфокусировки изображений во время последующего анализа. Недостатком изобретения является высокая трудоемкость, поскольку необходимо определять наилучшие фокусные расстояния для всего множества изображений.
Технические решения по патенту на изобретение «Переключение контроллера в реальном времени» (патент РФ № RU 2742466 C1, 2021 г.) направлены на оптимизацию системы сервоуправления, применяемой для управления исполнительным устройством, используемым в операциях фокусировки в системе получения изображений. В ходе работы этой системы выполняется распознавание текущего режима работы: режима формирования модели фокуса и режима получения изображений.
Недостатком этого технического решения можно считать невысокую производительность, поскольку при работе системы выполняется многократное переключение между режимом формирования модели фокуса и режимом получения изображений в сканирующем режиме.
Заявленные технические решения представлены в качестве целей, но отсутствуют алгоритмы достижения этих целей, например, алгоритм определения набора параметров для управления работой исполнительного устройства. Не представлены результаты оптимизации работы системы, не выполнена оценка параметра качества фокусировки.
Известна заявка на изобретение «Dynamic autofocus method and system for assay imager» (Метод и система динамической автофокусировки для анализатора изображений, заявка на изобретение США № US 20190153519 A1, 2019 г.), в которой предложена система динамического изменения фокусного расстояния в режиме реального времени.
Метод включает сканирование образца с помощью оптического узла путем разделения области сканирования на множество областей, определяемых шаблоном сканирования, и смещения настройки фокуса оптического блока во время сканирования образца.
Недостатком предложенного технического решения является необходимость определения параметра качества фокусировки на основе получения дополнительных изображений.
Известен патент на изобретение «Systems, methods, and apparatuses to image a sample for biological or chemical analysis» (Системы, методы и устройства для получения изображения образца для биологического или химического анализа, патент США № US 8951781 B2, 2015 г.), в котором предложено использовать поворотное зеркало, которое может занимать различные положения формирования изображения и фокусировки.
Недостатком изобретения является сложность оптической системы, включающей поворотное зеркало.
Ближайшим из известных изобретений по технической сущности и назначению является патент на изобретение «Устройство и способы для предиктивного отслеживания фокуса» (патент РФ № RU 2710004 C1, 2019 г.).
В патенте описана трехлучевая система, которая может обеспечивать упреждающее и ретроспективное отслеживание фокуса. В системе формирования изображения настройка фокуса для следующего местоположения образца может определяться с использованием файла истории, содержащего заданную настройку фокуса для каждого из множества местоположений образцов.
Недостатком этого технического решения является сложность системы, поскольку используются дополнительные приводы для выравнивания кассеты для образцов, учитывающие любой уклон ее поверхностей. Не приведен параметр для сравнения изображений и выработки управляющего сигнала для корректировки фокуса.
Предложенное техническое решение не обеспечивает ускорения формирования всех изображений с оптимальной фокусировкой, поскольку после вычисления разницы между первым и вторым положениями платформы для образцов, находящимися в фокусе, определяют параметр управляющего сигнала для перемещения платформы для образцов и получения изображения только в следующем местоположении платформы для образцов.
Целью предлагаемого изобретения является упрощение системы формирования изображений объектов флуоресценции анализируемых образцов ДНК, а также ускорение получения множества изображений с оптимальным качеством фокусировки.
Указанная цель достигается за счет разработки быстрого и эффективного способа определения и сохранения оптимального качества фокусировки изображения, включающего в себя:
определение с помощью микрообъектива и блока определения параметра качества фокусировки координат по оси Z при оптимальном значении параметра качества фокусировки изображения для четырех или более полей зрения, имеющих координаты опорных точек по по взаимно перпендикулярным осям X и Y, перпендикулярным оси Z,
аппроксимацию зависимости координаты Z от координат опорных точек X и Y непрерывными функциями,
управление с помощью контроллера устройством перемещения микрообъектива по оси Z для всех положений по осям X, Y в соответствии с полученными функциями зависимости координаты Z от координат опорных точек X и Y.
В одном из вариантов способа согласно настоящему изобретению для проточной ячейки, содержащей два ряда полей зрения поверхности, функции аппроксимации выражаются формулами:
Z1n = Z11 + (n - 1) * (Z1q - Z11) / (C - 1) - для первого ряда и
Zpn = Zp1 + (n - 1) * (Z pq - Zp1) / (C - 1) - для второго ряда,
где n - номер поля зрения по оси Y,
C - количество полей зрения вдоль оси Y,
p - координата опорной точки углового поля зрения по оси Х,
q - координата опорной точки углового поля зрения по оси Y.
В ещё одном из вариантов способа согласно настоящему изобретению для проточной ячейки, содержащей три и более рядов полей зрения поверхности, функция аппроксимации выражается формулой:
Zmn = Z1n + (m - 1) * (Zpn - Z1n) / (K - 1),
где K - количество полей зрения вдоль оси X,
m - номер поля зрения по оси Х.
Также указанная цель достигается за счет создания системы формирования оптических изображений объектов флуоресценции, которая содержит: платформу для образцов с проточной ячейкой, источник излучения для освещения поверхности с множеством объектов флуоресценции проточной ячейки, оптический блок для получения оптических изображений полей зрения поверхности проточной ячейки через микрообъектив, контроллер с устройствами перемещения платформы для образцов в направлении взаимно перпендикулярных осей X и Y и устройством для перемещения микрообъектива по оси Z, перпендикулярной осям X и Y, блок определения параметра качества фокусировки на основе сигналов объектов флуоресценции, блок оптимизации качества фокусировки изображения объектов флуоресценции, при этом система формирования оптических изображений дополнительно содержит функциональный вычислитель, связанный с указанным контроллером и блоком оптимизации качества фокусировки изображения, который определяет функциональную зависимость координаты объектива по оси Z от координат платформы для образцов по осям X и Y для поддержания оптимального качества фокусировки изображения, как минимум, в четырех полях зрения и устанавливает с помощью контроллера и устройства перемещения микрообъектива положение микрообъектива по оси Z для всех положений платформы для образцов по осям X и Y для поддержания оптимального качества фокусировки изображения в соответствии со способом согласно настоящему изобретению, описанным выше.
В одном из вариантов системы формирования оптических изображений объектов флуоресценции согласно настоящему изобретению указанный функциональный вычислитель представляет собой аппаратный модуль, связанный с контроллером и блоком оптимизации качества фокусировки изображения.
В ещё одном из вариантов системы формирования оптических изображений объектов флуоресценции согласно настоящему изобретению указанный функциональный вычислитель представляет собой модуль программного обеспечения указанного контроллера.
Блок оптимизации качества фокусировки изображения объектов флуоресценции определяет оптимальное качество фокусировки изображения в поле зрения путем изменения значения координаты объектива по оси Z и выбора значения, соответствующего наилучшему значению качества фокусировки.
Блок оптимизации качества фокусировки изображения определяет координаты Zn при оптимальном значении параметра качества фокусировки изображения для четырех или более полей зрения, имеющих координаты опорных точек Xm и Yn, выполняет аппроксимацию зависимости координаты Zn от координат опорных точек Xm и Yn непрерывными функциями и управляет с помощью контроллера устройством перемещения микрообъектива по оси Z для всех положений по осям X и Y при условии сохранения оптимального качества фокусировки изображения.
Настоящее изобретение поясняется следующими чертежами:
На Фиг. 1 изображена блок-схема, отражающая функциональный состав и соединения составных частей системы формирования изображений объектов флуоресценции согласно настоящему изобретению, где 1 - платформа для образцов, 2 - проточная ячейка, 3- источник излучения, 4- оптический блок, 5 - микрообъектив, 6 - контроллер устройств перемещения платформы для образцов, 7 и 8 - устройства перемещения платформы для образцов по осям Х и Y, 9 - устройство перемещения микрообъектива, 10 - блок определения параметра качества фокусировки, 11 - блок оптимизации качества фокусировки изображения, 12 - функциональный вычислитель;
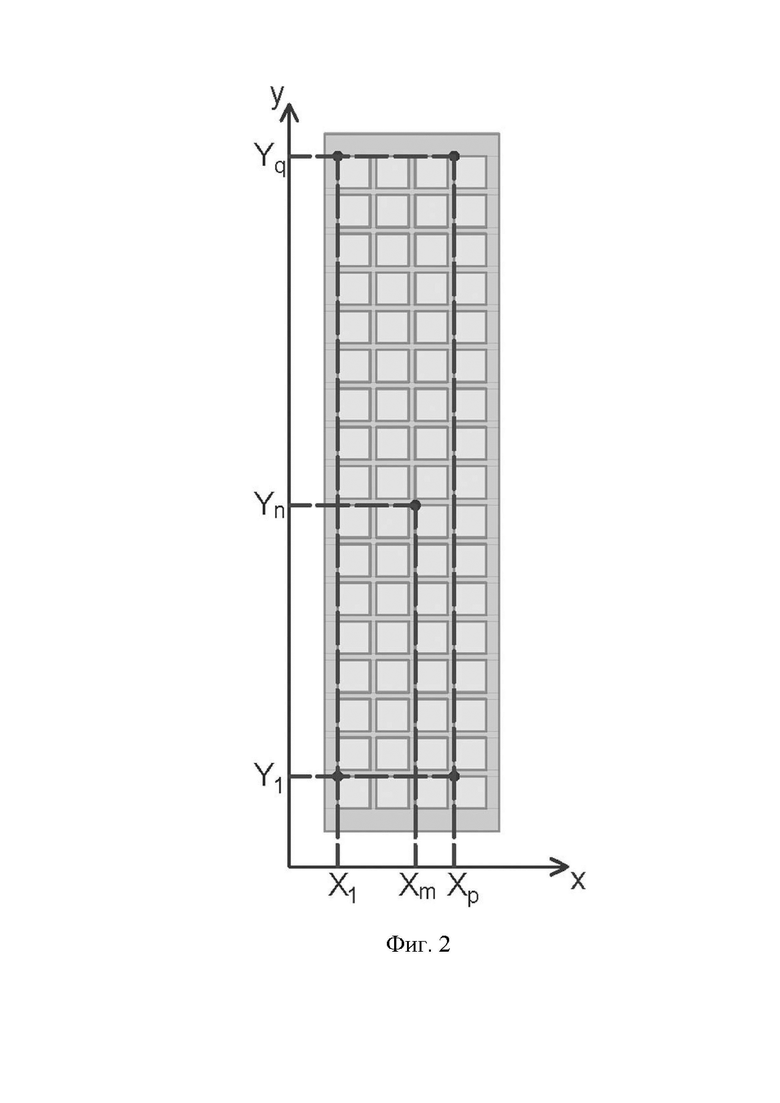
На Фиг. 2 показано изображение полей зрения на поверхности проточной ячейки 2;
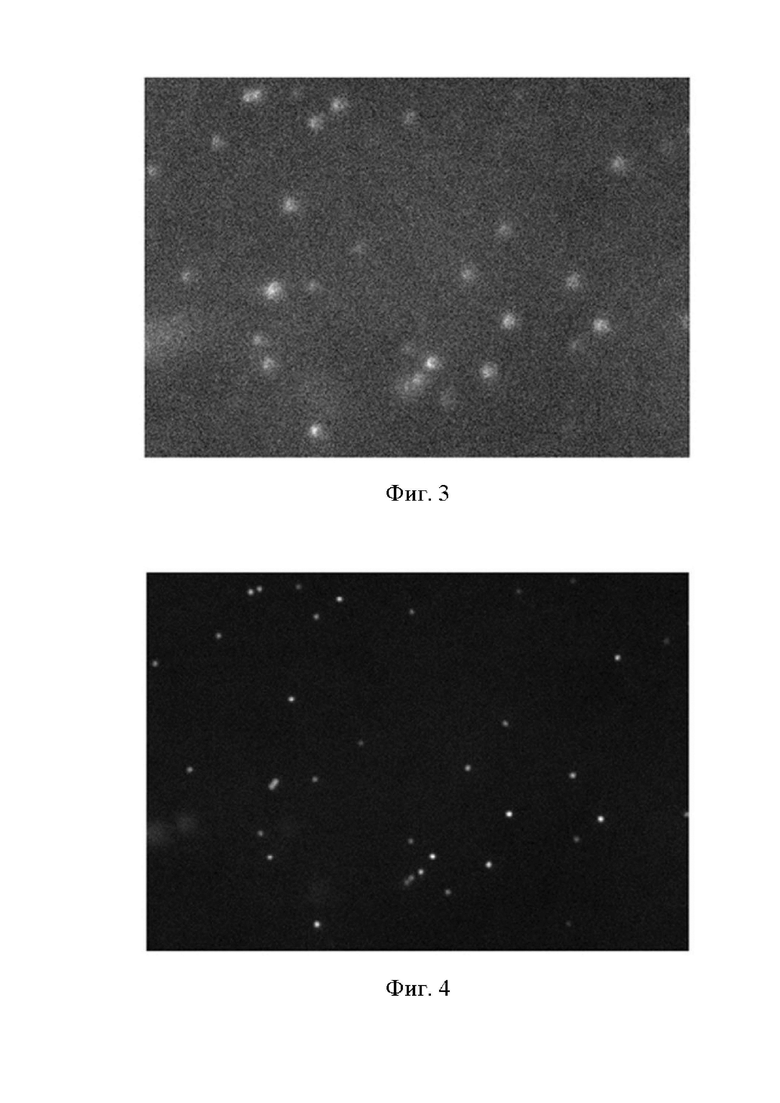
На Фиг. 3 показано изображение фрагмента поля зрения при начальном положении объектива;
На Фиг. 4 показано изображение фрагмента поля зрения при положении объектива с наилучшей значением качества фокусировки.
В предлагаемой системе формирования изображений использованы технические решения, приведенные на блок-схеме, изображенной на Фиг. 1.
Платформа для образцов 1 содержит проточную ячейку 2, как минимум на одной поверхности которой находятся множество объектов флуоресценции образцов.
Объекты флуоресценции образцов облучают лучами света источника излучения 3. Сигналы флуоресцентного отклика объектов флуоресценции образцов в виде оптического изображения поступают в оптический блок 4 через микрообъектив 5 и преобразуются в электрические сигналы.
Размеры проточной ячейки 2 значительно превосходят поле зрения детекторов оптического блока 4, поэтому полное изображение проточной ячейки получают путем последовательного наблюдения нескольких полей зрения, каждое из которых соответствует полю зрения оптического блока 4.
На Фиг. 2 приведен пример расположения полей зрения на поверхности проточной ячейки. В данном примере количество полей зрения равно 68 (17 полей зрения в 4 ряда). Каждое поле зрения имеет опорную точку. В качестве опорной точки может быть выбрана, например, координата верхнего левого угла поля зрения. Опорная точка первого поля зрения имеет координату по горизонтальным осям X1 и Y1. Опорная точка последнего поля зрения имеет координату Xp и Yq. Опорные точки промежуточных полей зрения имеют координаты Xm и Yn.
При работе контроллер 6 с помощью устройств перемещения платформы 7, 8 и устройства перемещения микрообъектива 9 устанавливает микрообъектив 5 оптического блока 4 в положение наблюдения первого поля зрения с координатами опорной точки X1, Y1 и Z11. Устройство определения параметра качества фокусировки 10 на основе изображения первого поля зрения определяет параметр качества фокусировки.
В качестве параметра качества фокусировки может быть использован один или несколько параметров: контраст изображения, отношение сигнала изображения к шуму, среднеквадратичная ошибка интенсивностей между пикселями в изображении, коэффициент вариации контрастности пикселей, либо сумма амплитуд частотных составляющих Фурье-образа центральной строки изображения. Преимущество таких параметров качества фокусировки заключается в том, что не требуется выделение отдельного кластера ампликонов.
Блок оптимизации качества фокусировки изображения 11 изменяет координату Z11 методом последовательного приближения таким образом, чтобы добиться максимальной величины параметра качества изображения. При этом шаги постепенно уменьшают для повышения точности оптимизации. В результате определяют координату Z11 при максимальной величине параметра качества изображения первого поля зрения. Далее блок оптимизации качества фокусировки изображения 11 последовательно повторяет операцию для 2, 3 и 4 полей зрения с координатами X1, Yq, Z1q; Xp, Y1, Zp1 и Xp,Yq, Zpq.
Функциональный вычислитель 12 определяет функциональную зависимость координаты микрообъектива по оси Z от координат по осям X и Y для всех полей зрения при условии оптимального качества фокусировки изображения в виде матрицы, которая включает 4 опорные точки угловых полей зрения поверхности проточной ячейки с координатами X1, Y1, Z11; X1, Yq, Z1q; Xp, Y1, Zp1 и Xp,Yq, Zpq.
Изменение координаты Z1n в промежуточных полях зрения, т.е. располагающихся между угловыми полями зрения и имеющих опорные точки с координатами X1 и Yn, по сравнению с координатой Z11 первого поля зрения, определяют по формуле:
dZ1n = Z1n - Z11= (n - 1) * (Z1q - Z11) / (C - 1), (1)
где n - номер поля зрения по оси Y,
C - количество полей зрения вдоль оси Y,
q - координата опорной точки углового поля зрения по оси Y.
Значение координаты Z 1n в промежуточных полях зрения, которые имеют базовые точки с координатами X1 и Yn, определяют по формуле:
Z1n = Z11 + dZ1n = Z11 + (n - 1) * (Z1q - Z11) / (C - 1). (2)
Изменение координаты Zpn в промежуточных полях зрения, которые имеют базовые точки с координатами Xp и Yn, по сравнению с координатой Zp1 третьего поля зрения, определяют по формуле:
dZpn = Zpn - Zp1 = (n - 1) * (Z pq - Zp1) / (C - 1). (3)
где
p - координата опорной точки углового поля зрения по оси Х.
Значение координаты Zpn в промежуточных полях зрения, которые имеют базовые точки с координатами Xp и Yn, определяют по формуле:
Zpn = Zp1 + dZpn = Zp1 + (n - 1) * (Z pq - Zp1) / (C - 1). (4)
Изменение координаты Zmn в промежуточных полях зрения, которые имеют опорные точки с координатами Xm и Yn, по сравнению с координатой Z1n первого поля зрения определяют по формуле:
dZmn = Zmn - Z1n = (m - 1) * (Zpn - Z1n) / (K - 1), (5)
где m - номер поля зрения по оси X;
K - количество полей зрения вдоль оси X.
Значение координаты Zmn в промежуточных полях зрения, которые имеют базовые точки с координатами Xm и Yn, определяют по формуле:
Zmn = Z1n + dZmn = Z1n + (m - 1) * (Zpn - Z1n) / (K - 1). (6)
В случае если поля зрения располагаются только в двух рядах, вычисления значительно упрощаются. Для вычисления всех значений координаты Zmn в промежуточных полях зрения достаточно в формулу (6) подставить значения Zp1 и Z11 для 1 ряда, а также значения Zp2 и Z12 - для 2 ряда.
Функциональный вычислитель 12 устанавливает с помощью контроллера 6 и устройства перемещения 9 по оси Z положение микрообъектива для всех полей зрения при условии оптимального качества фокусировки изображения.
На Фиг. 3 приведено изображение фрагмента поля зрения при начальном положении объектива. Изображения сигналов флуоресцентного отклика объектов флуоресценции имеют низкое значение параметра качества фокусировки.
На Фиг. 4 приведено изображение фрагмента поля зрения при положении объектива, соответствующему оптимальному значению параметра качества фокусировки изображения.
Блоки предложенной системы формирования изображения могут быть выполнены в виде интегральных микросхем. Таким образом, обеспечивается возможность уменьшения их габаритов и обеспечения коротких функциональных соединений. Функции контроллера может выполнять компьютер с соответствующей программой управления.
Система формирования изображений объектов флуоресценции согласно настоящему изобретению обеспечивает увеличение производительности прибора секвенирования ДНК путем синтеза за счет однократного определения функциональной зависимости координаты микрообъектива по оси Z от координат по осям X и Y с оптимальным качеством фокусировки изображения и многократного использования этой функциональной зависимости при непрерывном выполнении остальных операций параллельного секвенирования ДНК путем синтеза.
Источники информации
1. Патент на изобретение США № US 5647025 A. Automatic focusing of biomedical specimens apparatus. МПК G06T 5/20, 08.07.1997.
2. Патент на изобретение США № US 8508652 B2. Autofocus method. МПК G03B 13/00, H04N 5/232, H04N 5/228, G06K 9/40, G06K 9/36, G06K 9/64, 13.08.2013.
3. Патент на изобретение РФ № RU 2742466 C1. Переключение контроллера в реальном времени. МПК: C12Q 1/68, C12Q 1/6869, G02B 21/00, G02B 7/28, H04N 5/232, 08.02.2021.
4. Заявка на изобретение США № US 20190153519 A1. Dynamic autofocus method and system for assay imager. МПК C12Q 1/6818, C12Q 1/6874, G01B 11/24, H04N 5/232, G02B 21/24, 23.05.2019.
5. Патент на изобретение США № US 8951781 B2. Systems, methods, and apparatuses to image a sample for biological or chemical analysis. МПК C12M 3/00, B01L 9/00, B01L 3/00, 10.02.2015.
6. Патент на изобретение РФ № RU 2710004 C1. Устройство и способы для предиктивного отслеживания фокуса. МПК G02B 21/00, 23.12.2019.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптическое устройство для одномолекулярного секвенирования ДНК на основе параллельного детектирования флуоресценции в режиме реального времени | 2024 |
|
RU2838337C2 |
| БЛОК ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ ОПТИЧЕСКИ ПРОЗРАЧНОГО НОСИТЕЛЯ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ДАННЫХ | 2022 |
|
RU2813742C1 |
| УСТРОЙСТВО И СПОСОБЫ ДЛЯ ПРЕДИКТИВНОГО ОТСЛЕЖИВАНИЯ ФОКУСА | 2017 |
|
RU2710004C1 |
| Способ настройки оптического детекторного прибора | 2017 |
|
RU2800574C1 |
| УСТРОЙСТВО ДЛЯ ТЕСТИРОВАНИЯ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2701875C1 |
| МИКРОСКОПИЯ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ С ЛИНЕЙНЫМ СКАНИРОВАНИЕМ | 2019 |
|
RU2736104C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ С ИСПОЛЬЗОВАНИЕМ БИОЧИПОВ | 2007 |
|
RU2371721C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ МИКРОКОНТРАСТНЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПОЛЯРИЗАЦИОННЫЙ НАНОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2029976C1 |
| МИКРОСКОПИЯ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ УМЕНЬШЕННОЙ РАЗМЕРНОСТИ СО СТРУКТУРИРОВАННЫМИ МАССИВАМИ НАНОРАЗМЕРНЫХ ЛУНОК | 2019 |
|
RU2740776C1 |
| ОПТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ КОЛИЧЕСТВЕННОГО ИЗМЕРЕНИЯ КРИТИЧЕСКОГО РАЗМЕРА ДЛЯ НАНОРАЗМЕРНЫХ ОБЪЕКТОВ | 2014 |
|
RU2582484C1 |

Группа изобретений относится к способу определения и сохранения оптимального качества фокусировки изображения и к системе формирования изображения объектов флуоресценции в проточной ячейке. Изобретения могут быть использованы в приборах массового параллельного секвенирования ДНК путем синтеза. Способ включает определение параметра качества фокусировки координат по оси Z при оптимальном значении параметра качества фокусировки изображения для четырех или более полей зрения, имеющих координаты опорных точек по взаимно перпендикулярным осям X и Y; аппроксимацию зависимости координаты Z от координат опорных точек X и Y непрерывными функциями и управление устройством перемещения микрообъектива по оси Z для всех положений по осям X, Y в соответствии с полученными функциями зависимости координаты Z от координат опорных точек X и Y. Система содержит платформу для образцов с проточной ячейкой, источник излучения, оптический блок, контроллер с устройствами перемещения платформы для образцов и устройством для перемещения микрообъектива, блок определения параметра качества фокусировки, блок оптимизации качества фокусировки изображения и аппаратный модуль, связанный с контроллером (6) и блоком оптимизации качества фокусировки изображения (11), или модуль программного обеспечения контроллера (6), которые определяют функциональную зависимость координаты микрообъектива (5) по оси Z от координат платформы (1) для образцов по осям X и Y для поддержания оптимального качества фокусировки изображения и устанавливают положение микрообъектива по оси Z для всех положений платформы (1) для образцов по осям X и Y. Осуществление группы изобретений обеспечивает упрощение системы формирования изображений объектов флуоресценции анализируемых образцов ДНК, а также ускоряет получение множества изображений с оптимальным качеством фокусировки. 2 н. и 2 з.п. ф-лы, 4 ил.
1. Способ определения и сохранения оптимального качества фокусировки изображения, включающий в себя:
определение с помощью микрообъектива и блока определения параметра качества фокусировки координат по оси Z при оптимальном значении параметра качества фокусировки изображения для четырех или более полей зрения, имеющих координаты опорных точек по взаимно перпендикулярным осям X и Y, перпендикулярным оси Z,
аппроксимацию зависимости координаты Z от координат опорных точек X и Y непрерывными функциями,
управление с помощью контроллера устройством перемещения микрообъектива по оси Z для всех положений по осям X, Y в соответствии с полученными функциями зависимости координаты Z от координат опорных точек X и Y.
2. Способ по п. 1, отличающийся тем, что для проточной ячейки, содержащей два ряда полей зрения поверхности, функции аппроксимации выражаются формулами:
Z1n = Z11 + (n - 1) * (Z1q – Z11) / (C – 1) – для первого ряда и
Zpn = Zp1 + (n - 1) * (Z pq – Zp1) / (C - 1) – для второго ряда,
где n – номер поля зрения по оси Y,
C - количество полей зрения вдоль оси Y,
p – координата опорной точки углового поля зрения по оси Х,
q – координата опорной точки углового поля зрения по оси Y.
3. Способ по п. 2, отличающийся тем, что для проточной ячейки, содержащей три и более рядов полей зрения поверхности, функция аппроксимации выражается формулой:
Zmn = Z1n + (m - 1) * (Zpn - Z1n) / (K - 1),
где K - количество полей зрения вдоль оси X,
m – номер поля зрения по оси Х.
4. Система формирования изображения объектов флуоресценции, содержащая: платформу (1) для образцов с проточной ячейкой (2), которая имеет, как минимум, одну поверхность с множеством объектов флуоресценции, источник излучения (3) для освещения поверхности с множеством объектов флуоресценции проточной ячейки, оптический блок (4) для получения изображений полей зрения поверхности проточной ячейки через микрообъектив (5), контроллер (6) с устройствами (7, 8) перемещения платформы (1) для образцов в направлении взаимно перпендикулярных осей X и Y и устройством (9) перемещения микрообъектива (5) по оси Z, перпендикулярной осям X и Y, блок определения параметра качества фокусировки (10) на основе сигналов объектов флуоресценции, блок оптимизации качества фокусировки изображения (11) объектов флуоресценции, отличающаяся тем, что указанная система формирования оптических изображений дополнительно содержит аппаратный модуль, связанный с контроллером (6) и блоком оптимизации качества фокусировки изображения (11), или модуль программного обеспечения контроллера (6), которые определяют функциональную зависимость координаты микрообъектива (5) по оси Z от координат платформы (1) для образцов по осям X и Y для поддержания оптимального качества фокусировки изображения как минимум в четырех полях зрения и устанавливают с помощью контроллера (6) и устройства (9) положения микрообъектива по оси Z для всех положений платформы (1) для образцов по осям X и Y для определения и сохранения оптимального качества фокусировки изображения в соответствии со способом по любому из пп. 1-3.
| УСТРОЙСТВО И СПОСОБЫ ДЛЯ ПРЕДИКТИВНОГО ОТСЛЕЖИВАНИЯ ФОКУСА | 2017 |
|
RU2710004C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО СОЗДАНИЯ ИЗОБРАЖЕНИЯ, ИХ СПОСОБЫ УПРАВЛЕНИЯ И ПРОГРАММА | 2017 |
|
RU2707066C1 |
| US 8508652 B2, 13.08.2013 | |||
| WO 2017219099 А1, 28.12.2017. | |||

