Перекрестная ссылка на родственные заявки
[0001] Настоящая заявка испрашивает приоритет предварительной заявки на патент США №62/442,947, поданной 5 января 2017 года и озаглавленной «Способы и устройство для предиктивного отслеживания фокуса», которая полностью включена в настоящее описание посредством ссылки. Настоящая заявка также испрашивает приоритет заявки на патент Соединенного Королевства №1704770.5, поданной 24 марта 2017 года и озаглавленной «Устройство и способы для предиктивного отслеживания фокуса», которая испрашивает приоритет предварительной заявки на патент США №62/442,947, поданной 5 января 2017 г. и озаглавленной «Устройство и способы для предиктивного отслеживания фокуса».
Уровень техники
[0002] Многочисленные достижения в области биологии получают преимущества от улучшенных систем и методов формирования изображения, таких как, например, используемые в оптических микроскопах и сканерах. Поддержание точного фокуса во время формирования изображения с использованием этих систем формирования изображения может быть важным для успешных операций получения изображений. Соответственно, система перед использованием часто калибруется по фокальной плоскости. Однако, например, при более крупных кассетах для образцов эта калибровка может быть недостаточной для учета изменений по всей площади образца или образцов. Например, рассмотрим случай кассеты для образцов, содержащей множество образцов в различных местоположениях образцов, определенных набором координат. Эти местоположения образцов могут находиться в разных фокальных плоскостях из-за изгиба или деформации, или из-за тепловых изменений или других факторов, вызывающих неровности в кассете для образцов. В результате некоторые системы выполняют фокусировку в режиме реальном времени, поскольку операция сканирования выполняется в различных местоположениях образцов вдоль кассеты для образцов. Однако существует задержка, связанная с перефокусировкой системы в каждом местоположении образца. Эта задержка влияет на скорость, с которой можно получить изображения различных образцов из кассеты для образцов.
Сущность изобретения
[0003] В примерах, приведенных в настоящем документе, представлены устройства для биологического анализа. Более конкретно, различные примеры раскрывают системы и способы отслеживания фокуса для устройств, используемых при анализе биологических образцов.
[0004] Различные примеры технических решений, раскрытых в настоящем документе, обеспечивают системы и способы для уменьшения задержки, связанной с отслеживанием фокуса в оптических сканерах. В некоторых примерах представлены системы и способы для получения информации о сигнале ошибки отслеживания фокуса для местоположений образца до достижения этих местоположений образца. Это может быть достигнуто, например, путем добавления дополнительных точек в поле зрения оптической системы, которые можно использовать для заглядывания вперед, чтобы получить информацию о фокусировке для одного или более местоположений образца в направлении или направлениях будущих местоположений образца, которые необходимо исследовать. В других примерах для кассеты для образцов может создаваться и поддерживаться файл истории, содержащий информацию о фокусировке для множества местоположений образца в этой кассете для образцов. Когда кассета для образцов будет загружена для операций формирования изображения, ее соответствующий файл истории также может быть установлен для предоставления информации о фокусировке в каждом из идентифицированных местоположений образца. В других примерах для увеличения скорости достижения фокусировки можно использовать усовершенствованные приводы.
[0005] В некоторых примерах система формирования изображения может включать в себя: платформу для образцов, имеющую поверхность для поддержания кассеты для образцов, причем кассета для образцов содержит множество местоположений образцов; оптическую платформу, содержащую объектив, причем оптическая платформа выполнена с возможностью позиционирования относительно платформы для образцов для получения изображения образцов в местоположениях образцов; привод, физически связанный по меньшей мере с одной из платформы для образцов и оптической платформы, чтобы перемещать платформу для образцов относительно оптической платформы, чтобы фокусировать оптическую платформу на текущее местоположение образца; и управляющую схему для определения настройки фокуса для следующего местоположения образца и для подачи управляющего сигнала на привод до позиционирования оптической платформы для получения изображения образца в следующем местоположении образца, при этом по меньшей мере один параметр управляющего сигнала определен с использованием разницы между настройкой фокуса для текущего местоположения образца и настройкой фокуса, определенной для следующего местоположения образца.
[0006] В дополнительных примерах способ отслеживания фокуса может включать в себя определение первого находящегося в фокусе положения платформы для образцов для текущего местоположения образца на сканируемой кассете для образцов; определение второго находящегося в фокусе положения указанной платформы для следующего местоположения образца, подлежащего сканированию; вычисление разницы между первым и вторым находящимися в фокусе положениями; и отправку управляющего сигнала на привод платформы для перемещения платформы для образцов относительно оптической платформы из первого находящегося в фокусе положения во второе находящееся в фокусе положение в момент времени t до того, как платформа будет позиционирована для получения изображения в следующем местоположении образца, причем по меньшей мере один параметр управляющего сигнала определяют с использованием разницы между первым и вторым находящимися в фокусе положениями.
[0007] В других дополнительных примерах способ отслеживания фокуса включает в себя: определение первого находящегося в фокусе положения платформы для образцов для текущего местоположения образца на сканируемой кассете для образцов; определение второго находящегося в фокусе положения платформы для следующего местоположения образца, подлежащего сканированию; вычисление уклона кассеты для образцов с использованием первого и второго находящихся в фокусе положений; и отправку управляющего сигнала на привод платформы для перемещения платформы для образцов относительно оптической платформы, причем управляющий сигнал генерируют с использованием уклона кассеты для образцов.
[0008] Следует понимать, что любые соответствующие признаки/примеры каждого из примеров изобретения, раскрытых в настоящем документе, могут быть реализованы вместе в любой комбинации, и что любые признаки/примеры из любого одного или более этих примеров могут быть реализованы вместе с любым из признаков другого аспекта (аспектов), раскрытых в настоящем документе, в любой комбинации.
Краткое описание чертежей
[0009] Техническое решение, раскрытое в настоящем документе, в соответствии с одним или более примерами, подробно описано со ссылкой на следующие графические материалы. Эти графические материалы представлены для облегчения понимания читателем раскрытого технического решения и не предназначены для того, чтобы быть исчерпывающими или ограничивать изобретение конкретными раскрытыми типами. Действительно, чертежи в графических материалах представлены только в иллюстративных целях и просто изображают типовые или иллюстративные примеры раскрытого технического решения. Кроме того, следует отметить, что для ясности и простоты изображения элементы на чертежах не обязательно изображены в масштабе.
[0010] На фиг. 1 представлена упрощенная блок-схема одного примера системы сканирования изображения, с помощью которой можно реализовать системы и способы, раскрытые в настоящем документе.
[0011] На фиг. 2 представлена схема, иллюстрирующая примерный процесс для предиктивного отслеживания фокуса в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе.
[0012] На фиг. 3 представлена схема, иллюстрирующая пример оптической конструкции для предиктивного отслеживания фокуса в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе.
[0013] На фиг. 4А представлена схема, иллюстрирующая другой пример оптической конструкции для предиктивного отслеживания фокуса в соответствии с одним примером систем и способов, раскрытых в настоящем документе.
[0014] На фиг. 4В представлена схема, иллюстрирующая альтернативный вид части оптической системы, показанной на фиг. 4А.
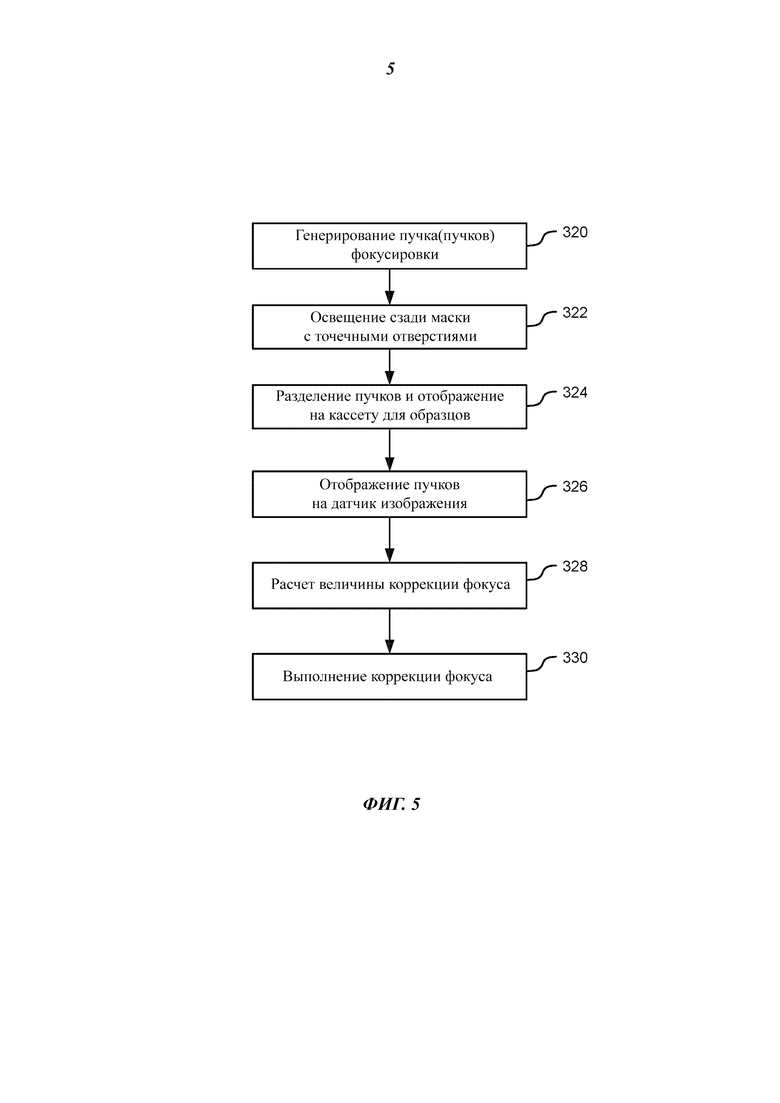
[0015] На фиг. 5 представлена схема, иллюстрирующая пример процесса предиктивной фокусировки с использованием оптической системы, такой как оптическая система, показанная на фиг. 3.
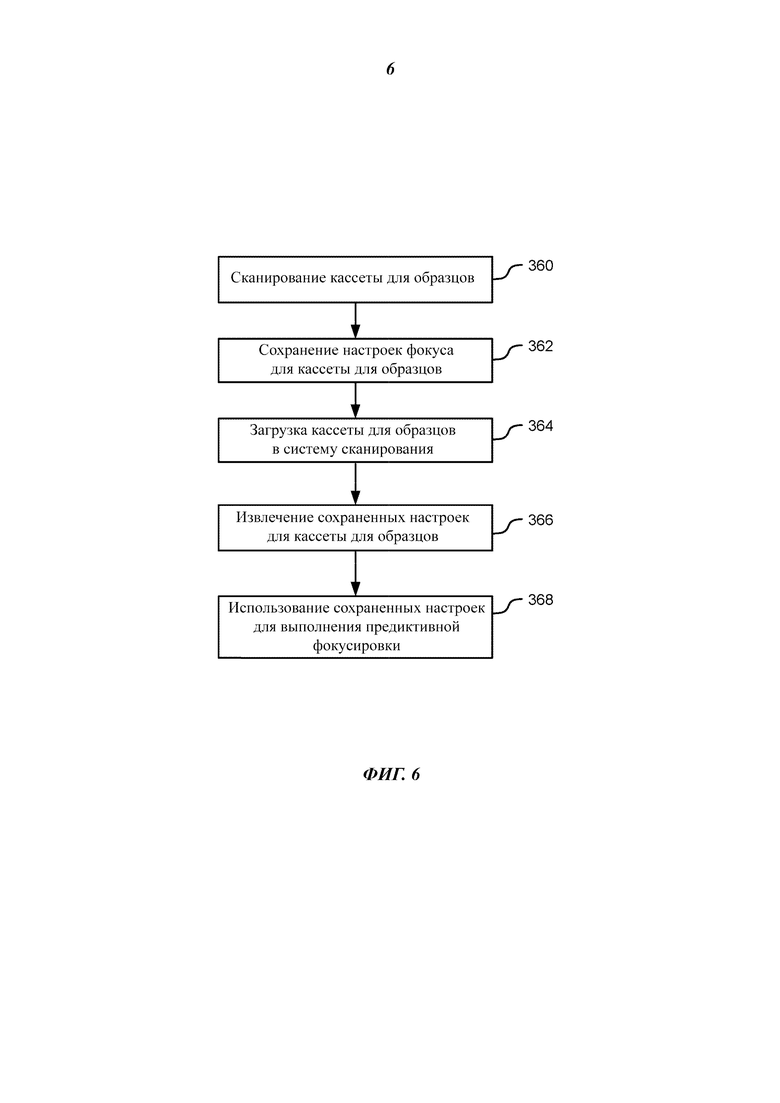
[0016] На фиг. 6 представлена схема, иллюстрирующая примерный процесс для предиктивного отслеживания фокуса с использованием сохраненной информации в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе.
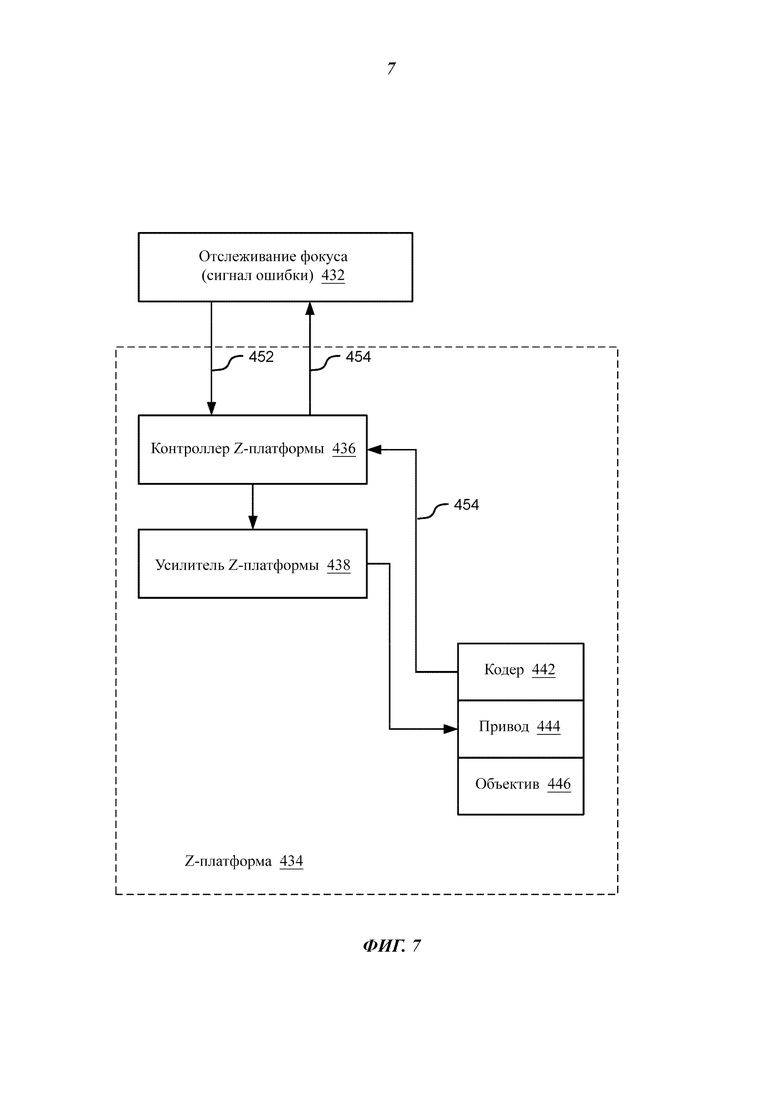
[0017] На фиг. 7 представлена блок-схема, иллюстрирующая примерную систему управления фокусом для отслеживания фокуса в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе.
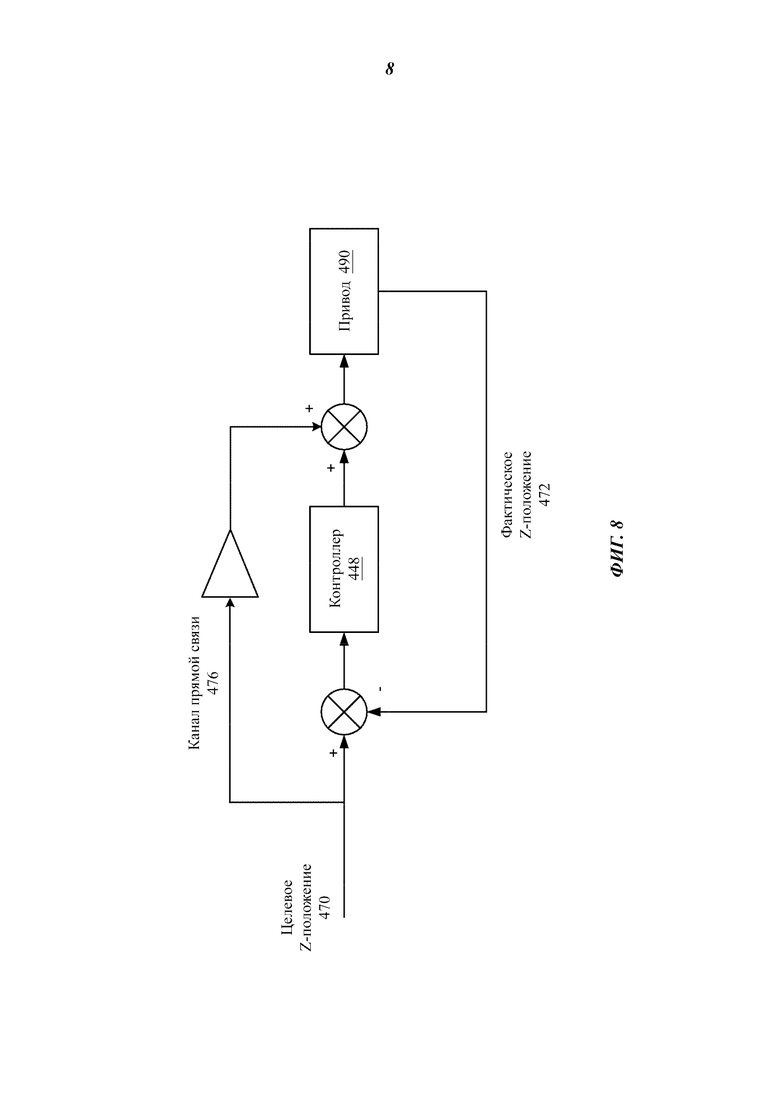
[0018] На фиг. 8 представлена схема, иллюстрирующая примерную архитектуру для контроллера z-платформы в соответствии с одним из примером систем и способов, раскрытых в настоящем документе.
[0019] На фиг. 9 представлена схема, иллюстрирующая другую примерную архитектуру для контроллера z-платформы в соответствии с одним из примеров систем и способов, раскрытых в данном документе.
[0020] Следует понимать, что раскрытое техническое решение может применяться на практике с модификацией и изменением, и что раскрытое техническое решение ограничена только формулой изобретения и ее эквивалентами.
Осуществление изобретения
[0021] Различные примеры технических решений, раскрытых в настоящем документе, обеспечивают системы и способы для уменьшения задержки, связанной с отслеживанием фокуса в оптических сканерах. В некоторых примерах обеспечиваются системы и способы для получения сигнальной информации об ошибке отслеживания фокуса для местоположений образцов до достижения этих местоположений образцов. Этого можно достичь, например, путем добавления дополнительных точек в поле зрения оптической системы, которые можно использовать, чтобы с опережением получать информацию о фокусировке для одного или более местоположений образцов в направлении или направлениях будущих местоположений образцов, подлежащих исследованию. В других примерах для кассеты для образцов можно создать и поддерживать файл истории, который включает в себя информацию о фокусировке для множества местоположений образцов в этой кассете для образцов. Когда кассету для образцов загружают для операций формирования изображения, также можно установить ее соответствующий файл истории для обеспечения информации о фокусировке в каждом из идентифицированных местоположений образцов. В других примерах можно использовать усовершенствованные приводные устройства для увеличения скорости, с которой выполняется фокусировка.
[0022] Различные примеры систем и способов, раскрытых в настоящем документе, могут обеспечить систему предиктивного отслеживания фокуса и усовершенствованные приводные устройства, которые обеспечивают увеличенные скорости сканирования и улучшенное управление фокусом по сравнению с традиционными решениями. Например, система может быть выполнена с возможностью обеспечения равномерного формирования изображения с ограниченной дифракцией при высоких скоростях сканирования, что приводит к высоким скоростям сбора данных. В качестве дополнительного примера, некоторые варианты осуществления могут обеспечивать 4-кратную скорость сканирования, что приводит к сканированию данных порядка 120 Гбит/час. Методы предиктивного фокуса и усовершенствованные приводные технические решения, такие как раскрыты в настоящем документе, могут использоваться для уменьшения задержки и, таким образом, помогают достигать этих повышенных скоростей сканирования, а также достигать точности фокусировки в нанометровом масштабе.
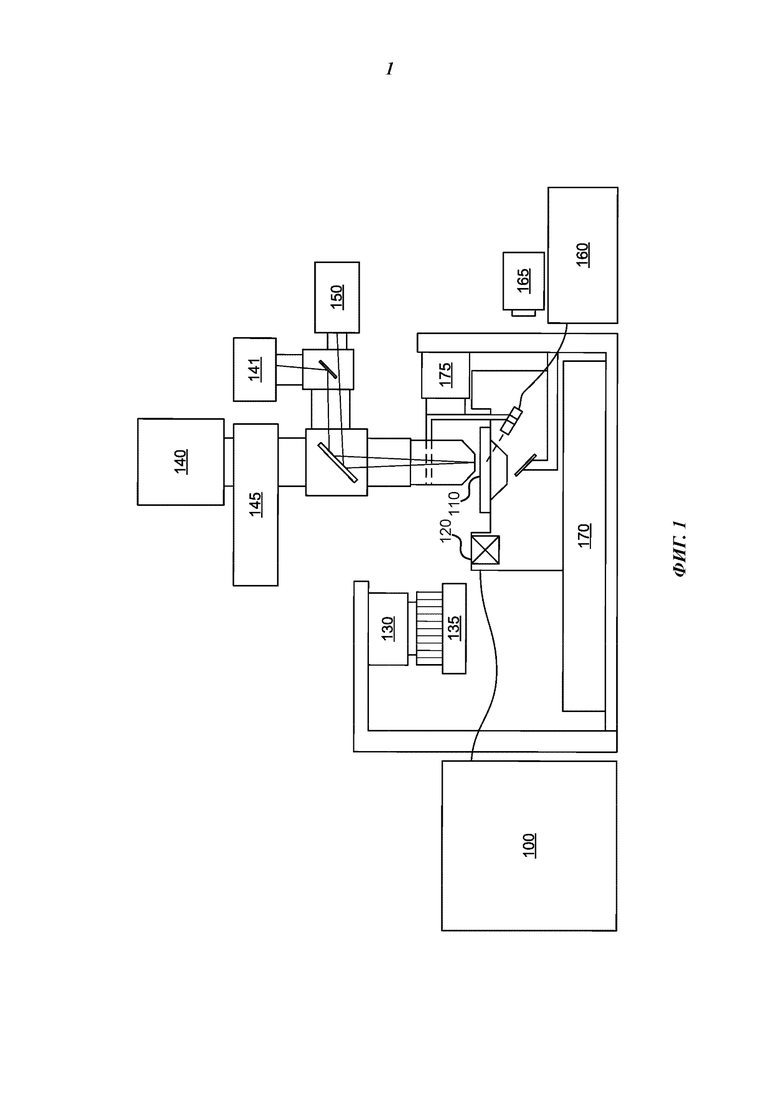
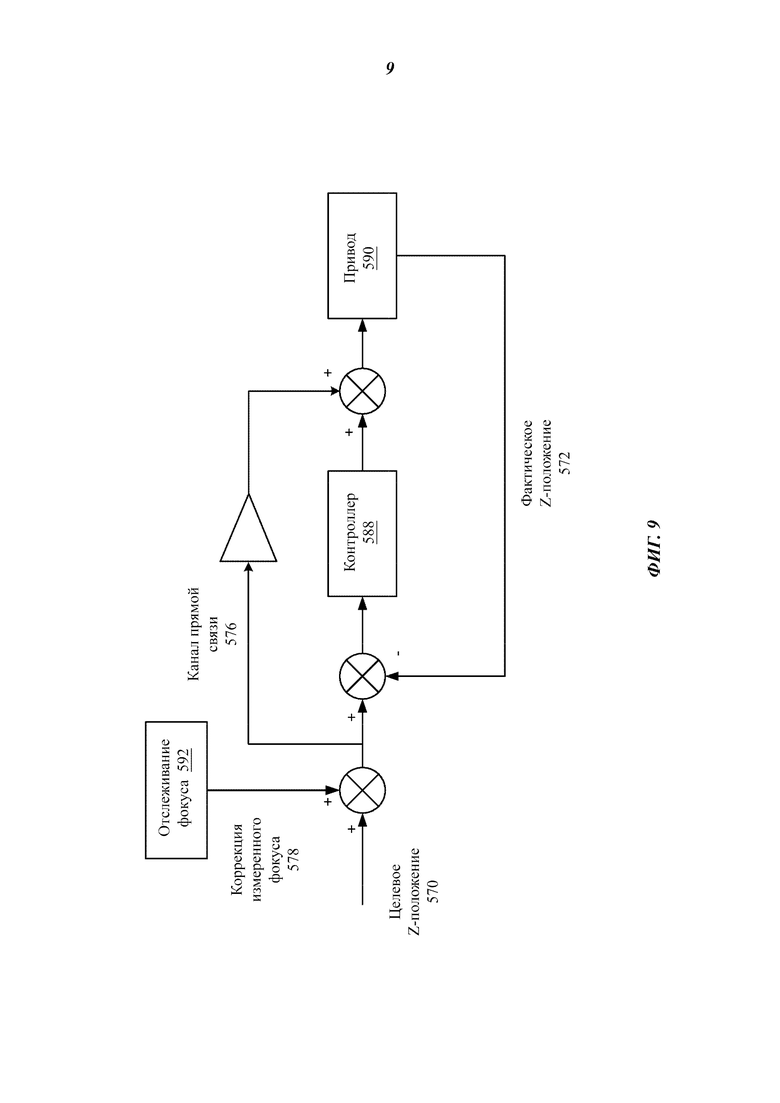
[0023] Перед раскрытием различных примерных систем и способов полезно описать примерную среду, в которой могут быть реализованы указанные системы и способы. Одним из таких примеров такой среды является система сканирования изображений, как показано на фиг. 1. Примерная система сканирования изображений может включать в себя устройство для получения или создания изображений какой-либо области. Пример, представленный на фиг. 1 показывает пример конфигурации для формирования изображения с задней подсветкой.
[0024] Как видно из примера на фиг. 1, исследуемые образцы находятся на кассете 110 для образцов, которая расположена на платформе 170 для образцов под объективом 142. Источник света 160 и соответствующее оптическое устройство направляют световой пучок, например, лазерный световой пучок, в выбранное местоположение образца на кассете 110 для образцов. Образец флуоресцирует, и полученный свет собирается объективом 142 и направляется на фотодетектор 140 для детектирования флуоресценции. Платформа 170 для образцов перемещается относительно объектива 142, чтобы поместить в фокусную точку объектива 142 следующее местоположение образца на кассете 110 для образцов. Перемещение платформы 110 для образцов относительно объектива 142 может быть достигнуто путем перемещения самой платформы для образцов, объектива, всей оптической платформы или любой комбинации вышеперечисленного. Дополнительные примеры могут также включать в себя перемещение всей системы формирования изображения над неподвижным образцом.
[0025] Модуль или устройство 100 для подачи текучей среды направляет поток реагентов (например, флуоресцентных нуклеотидов, буферов, энзимов, реагентов для расщепления и т.д.) в (и через) кассету 110 для образцов и сливной клапан 120. В некоторых примерах применения кассету 110 для образцов можно выполнить в виде проточной ячейки, которая включает в себя кластеры последовательностей нуклеиновых кислот во множестве местоположений образца в кассете для образцов 110. Образцы, подлежащие секвенированию, могут быть прикреплены к подложке проточной ячейки вместе с другими опциональными компонентами.
[0026] Система также содержит привод 130 температурной станции и нагреватель/охладитель 135, которые при необходимости могут регулировать температуру режимов текучих сред в кассете 110 для образцов. Может быть предусмотрена система 140 видеонаблюдения для мониторинга и отслеживания выполнения последовательности операций с кассетой 110 для образцов. Система 140 видеонаблюдения может быть реализована, например, как CCD-камера (камера на приборе с зарядовой связью), которая может взаимодействовать с различными фильтрами в узле 145 переключения фильтров, объективом 142 и фокусировочным лазером/узлом 150 фокусировочного лазера. Система 140 видеонаблюдения не ограничена CCD-камерой, также можно использовать другие технические решения камер и датчиков изображения.
[0027] Источник 160 света (например, лазер возбуждения в составе узла, как вариант, содержащего несколько лазеров) или другой источник света могут быть предусмотрены для подсветки реакций флуоресцентного секвенирования в образцах с помощью подсветки через волоконно-оптический интерфейс 161 (который, опционально, может содержать одну или более линз восстановления изображения, волоконно-оптическое крепление и т.д.). В показанном примере также представлены низковаттная лампа 165, фокусировочный лазер 150 и обратное дихроичное устройство 185. В некоторых вариантах применения фокусировочный лазер 150 может быть выключен во время формирования изображения. В других вариантах использования альтернативная конфигурация фокусировки может включать в себя вторую фокусировочную камеру (не показана), которая может быть квадрантным детектором, позиционно-чувствительным детектором (PSD) или аналогичным детектором для измерения местоположения рассеянного пучка, отраженного от поверхности одновременно со сбором данных.
[0028] Хотя представлено устройство с задней подсветкой, другие примеры могут включать в себя свет от лазера или другого источника света, который направляется через объектив 142 на образцы на кассете 110 для образцов. Кассета 110 для образцов в конечном итоге может быть установлена на платформу 170 для образцов, чтобы обеспечить перемещение и выравнивание кассеты 110 для образцов относительно объектива 142. Платформа для образцов может иметь один или более приводов, обеспечивающих ее перемещение в любом из трех измерений. Например, применительно к декартовой системе координат могут быть предусмотрены приводы, обеспечивающие перемещение платформы в направлениях X, Y и Z относительно объектива. Это может обеспечить возможность размещения одного или более местоположений образцов на кассете 110 для образцов в оптическом совмещении с объективом 142.
[0029] Фокусирующий (по оси z) компонент 175 показан в этом примере как предусмотренный для управления позиционированием оптических компонентов относительно кассеты 110 для образцов в направлении фокусировки (обычно называемом осью z или направлением z), Фокусирующий компонент 175 может включать в себя один или более приводов, физически связанных с оптической платформой, или платформой для образцов, или обоими, чтобы перемещать кассету 110 для образцов на платформе 170 для образцов относительно оптических компонентов (например, объектива 142), чтобы обеспечить надлежащую фокусировку для операции формирования изображения. Например, привод может быть физически связан с соответствующей платформой, например, механическим, магнитным, пневмогидравлическим или другим креплением, или прямо или опосредовано контактировать с платформой. Один или более приводов могут быть выполнены с возможностью перемещения платформы в направлении z, одновременно поддерживая платформу для образцов в одной плоскости (например, поддерживая уровень или горизонтальное положение, перпендикулярное оптической оси). Один или более приводов также могут быть выполнены с возможностью наклона платформы. Это можно сделать, например, так, чтобы кассету 110 для образцов можно было динамически выравнивать, учитывая любой уклон на ее поверхностях.
[0030] Фокусировка системы, в общем, относится к совмещению фокальной плоскости объектива с образцом, подлежащим отображению в выбранном местоположении образца. Однако фокусировка также может относиться к настройкам системы для получения требуемых параметров для представления образца, например, таких как требуемый уровень резкости или контрастности для отображения тестового образца. Поскольку полезная глубина поля фокальной плоскости объектива, как правило, очень мала (иногда порядка 1 мкм или менее), фокусирующий компонент 175 следует за отображаемой поверхностью на близком расстоянии. Поскольку кассета для образцов, как устанавливается в приборе, не является идеально плоской, фокусирующий компонент 175 можно настроить так, чтобы он следовал этому профилю при движении в направлении сканирования (обычно называемом осью у).
[0031] Свет, исходящий от тестируемого образца в отображаемом местоположении образца, может быть направлен на один или более детекторов 140. Детекторы могут включать в себя, например, CCD-камеру. Можно предусмотреть диафрагму, расположенную таким образом, чтобы пропускать на детектор только свет, исходящий из области фокусировки. Диафрагму можно предусмотреть для улучшения качества изображения путем фильтрации компонентов света, исходящего из областей, которые находятся за пределами области фокусировки. Фильтры излучения могут быть включены в узел 145 переключения фильтров, который можно выбрать для записи определенной длины волны излучения и для отсечения любого паразитного лазерного излучения.
[0032] В различных примерах кассета 110 для образцов может включать в себя одну или более подложек, на которых представлены образцы. Например, в случае системы для анализа большого числа различных последовательностей нуклеиновых кислот кассета 110 для образцов может включать в себя одну или более подложек, на которой находятся присоединенные, прикрепленные или связанные с ней нуклеиновые кислоты, подлежащие секвенированию. В различных примерах подложка может включать в себя любую инертную подложку или матрицу, к которой могут быть присоединены нуклеиновые кислоты, например, стеклянные поверхности, пластмассовые поверхности, латекс, декстран, полистирольные поверхности, полипропиленовые поверхности, полиакриламидные гели, золотые поверхности и кремниевые пластины. В некоторых примерах применения подложка находится внутри канала или другой области во множестве местоположений, сформированных в матрице или решетке на кассете 110 для образцов.
[0033] Хотя это не проиллюстрировано, может быть предусмотрен контроллер для управления работой системы сканирования. Контроллер может быть выполнен с возможностью управления такими аспектами работы системы, как, например, фокусировка, перемещение платформы и операции формирования изображения. В различных примерах применения контроллер может быть выполнен с использованием аппаратного обеспечения, программного обеспечения или комбинации вышеперечисленного. Например, в некоторых вариантах исполнения контроллер может включать в себя один или более центральных процессоров или процессоров со связанной памятью. В качестве другого примера, контроллер может содержать аппаратные или другие схемы для управления работой. Например, эта схема может включать в себя одно или более из следующего: программируемая пользователем вентильная матрица (FPGA), специализированная интегральная схема (ASIC), программируемое логическое устройство (PLD), комплексное программируемое логическое устройство (CPLD), программируемая логическая матрица (PLA), программируемая матричная логика (PAL) или другое подобное процессорное устройство или схема. В качестве еще одного примера контроллер может содержать комбинацию этой схемы с одним или более процессорами.
[0034] Хотя в настоящем документе периодически могут раскрываться системы и способы в контексте этой примерной системы, это только один пример, в котором эти системы и способы могут быть реализованы. После прочтения этого описания специалист в данной области техники поймет, как системы и способы, раскрытые в настоящем документе, могут быть реализованы с этим и другими сканерами, микроскопами и другими системами формирования изображения.
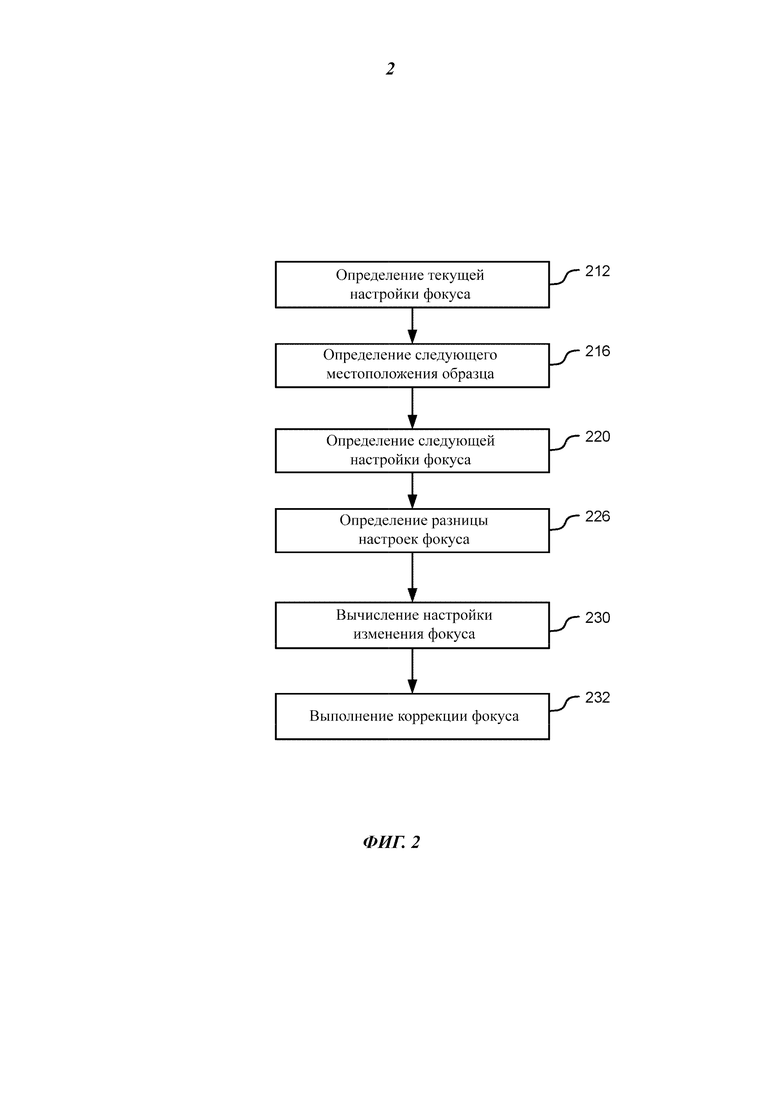
[0035] Примеры технического решения, раскрытого в настоящем документе, обеспечивают системы и способы для предиктивного отслеживания фокуса, чтобы уменьшить задержку при фокусировке. Фиг. 2 является схемой, иллюстрирующей процесс для предиктивного отслеживания фокуса в соответствии с одним примером систем и способов, раскрытых в настоящем документе. Обратимся теперь к фиг. 2, где на этапе 212 система определяет текущую настройку фокуса. Например, система может быть выполнена с возможностью определения настройки фокуса для текущего этапа формирования изображения в текущем местоположении образца на кассете для образцов. В различных примерах эта настройка фокуса для текущего местоположения образца может быть определена заранее (например, с использованием предиктивных способов, раскрытых в настоящем документе).
[0036] Обычно, в процессе работы, пучок фокусировки, генерируемый фокусировочным лазером, отражается от местоположения образца, чтобы измерить требуемый фокус, при этом платформа для образцов перемещается относительно оптической платформы, чтобы установить фокус оптической платформы на текущем местоположении образца. Перемещение платформы для образцов относительно оптической платформы для фокусировки обычно описывается как движение вдоль оси z или в направлении z. Термины «ось z» и «направление z» предназначены для использования в соответствии с их использованием в области систем микроскопии и формирования изображения в целом, в которых ось z относится к фокальной оси. Соответственно, поступательное перемещение по оси z приводит к увеличению или уменьшению длины фокальной оси. Перемещение по оси z может быть выполнено, например, путем перемещения платформы для образцов относительно оптической платформы (например, путем перемещения платформы для образцов, или оптического элемента, или их обоих). По существу, перемещение по оси z может быть выполнено путем приведения в действие объектива, оптической платформы, или платформы для образцов, или сочетания вышеуказанных элементов, любой из которых может быть приведен в движение путем приведения в действие одного или более сервоприводов, или двигателей, или других приводов, которые функционально связаны с объективом, или с платформой для образцов, или с ними обоими. В различных примерах приводы могут быть выполнены с возможностью наклонять платформу для образцов относительно оптической платформы, например, для эффективного выравнивания кассеты для образцов в плоскости, перпендикулярной оси оптического формирования изображения. В тех случаях, когда этот динамический наклон выполняется для эффективного выравнивания местоположений образца на кассете для образцов, это может обеспечить возможность перемещения кассеты для образцов в направлениях х и у для сканирования с небольшим или нулевым требуемым перемещением по оси z.
[0037] На этапе 216 система определяет следующее местоположение образца, в которое будет помещена оптическая платформа для формирования изображения. Это можно определить, например, по алгоритму сканирования, который используется для перемещения платформы для образцов относительно оптической платформы (например, в направлениях х и у). Например, в некоторых примерах применения система перемещается от одного местоположения образца к следующему соседнему местоположению образца, пока не будут отображены все требуемые местоположения образца. В других приложениях могут быть реализованы другие шаблоны сканирования.
[0038] Затем система определяет настройку фокуса для этого следующего местоположения образца. Это проиллюстрировано на этапе 220. Как часть предиктивной фокусировки, настройка фокуса для этого следующего местоположения образца определяется до позиционирования объектива для операций формирования изображения в следующем местоположении образца. Соответственно, в некоторых примерах можно определить настройку фокуса для следующего местоположения образца, например, пока система отображает текущее местоположение образца или до позиционирования системы для отображения текущего местоположения образца. Настройка фокуса для следующего местоположения образца, в общем, может быть определена с использованием любого из ряда различных методов предиктивной фокусировки. Например, настройка фокуса для следующего местоположения образца может быть определена с использованием одного или более внеосевых пучков для прогнозирования фокуса, которые направлены в следующее местоположение, чтобы заранее определить следующее местоположение. В качестве другого примера предиктивной фокусировки один или более пучков могут быть направлены в следующее или другое будущее местоположение образца, в предыдущие местоположения образца (например, в обратном направлении сканирования), в местоположения образца, находящиеся сбоку от текущего местоположения образца (сбоку относительно направления движения сканирования, перпендикулярно направлению движения или под другими углами) для сбора информации о фокусе для различных точек в дополнение или вместо настройки фокуса для непосредственно следующего местоположения образца.
[0039] В качестве еще одного примера предиктивной фокусировки, настройки фокуса для множества местоположений образцов на носителе образцов можно определить перед текущей операцией сканирования. Эти настройки фокуса для каждого из множества местоположений образца можно сохранить в электронном виде в файле истории для данной кассеты для образцов и извлечь, когда кассету для образцов повторно загрузят в систему формирования изображения для операций сканирования. Предварительное определение настроек фокуса местоположения образца для носителя образцов можно выполнить при прогоне установочной программы, который можно выполнить, например, без каких-либо образцов на месте. Альтернативно, предварительное определение можно выполнить во время рабочего сканирования образцов на носителе образцов и сохранить в файле истории для будущих операций сканирования. В различных примерах качество изображения из предыдущих прогонов может быть проверено и использовано для дополнения или обновления ранее сохраненной модели фокуса для системы. Если качество изображения из предыдущих прогонов является высоким, то эту информацию можно использовать для ранжирования файла истории или для указания файла истории на относительно высоком уровне достоверности.
[0040] На этапе 226 система определяет разницу между текущей настройкой фокуса и следующей настройкой фокуса. Эта разница указывает на величину изменения расстояния между оптической платформой и платформой для образцов, которое потребуется, чтобы сфокусировать систему для следующего местоположения образца. Система использует эту информацию на этапе 230 для вычисления настройки изменения фокуса. Эта разница в настройке фокуса между текущим местоположением образца и следующим местоположением образца обеспечивает сигнал ошибки, который используется для определения управляющего выхода, используемого для управления приводом фокуса в фокусирующем компоненте 175.
[0041] Например, система может быть реализована для определения параметров управляющего сигнала, который будет подан на привод для перемещения оптической платформы относительно платформы для образцов для следующей операции дискретизации. Как правило, для большего поступательного перемещения по оси z или большего уклона будет задан больший управляющий выход (например, один или более параметров, таких как больший управляющий ток, большее напряжение и больший рабочий цикл).
Аналогичным образом, для меньших расстояний перемещения или меньших уклонов будет задан меньший управляющий выход (например, меньший управляющий ток, более низкое напряжение и меньший рабочий цикл). Управляющий выход можно регулировать, например, путем регулировки тока или напряжения, подаваемого на привод. Кроме того, в некоторых примерах время, в которое управляющий сигнал подается на привод, можно регулировать на основании величины поступательного перемещения на z-расстояние, требуемое для изменения фокусировки. Например, если требуемое расстояние больше, то управляющий сигнал может быть подан раньше. Однако в других примерах управляющий сигнал подается как можно раньше после завершения дискретизации в текущем местоположении, независимо от разницы в установочных параметрах фокуса. В других примерах управляющий сигнал может подаваться на несколько приводов на разных выходных уровнях для наклона образца вместо перемещения всего образца вдоль оси z или в дополнение к нему.
[0042] Параметры управляющего сигнала и время, в которое подается управляющий сигнал, могут быть определены на основании типа привода и требований к приведению в действие. Например, некоторые приводы представляют собой емкостную нагрузку и требуют, чтобы определенный уровень заряда был повышен до приведения в действие привода. Пример такого привода включает в себя пьезоэлектрические приводы. Другие приводы, например, такие как приводы со звуковой катушкой, могут представлять большую индуктивную нагрузку. Такие приводы имеют разные характеристики, диктующие требования к параметрам управляющего сигнала.
[0043] На этапе 232 установленный управляющий сигнал подается на привод для выполнения коррекции фокуса. В различных примерах управляющий сигнал с установленными параметрами подается на привод, чтобы заставить привод переместить оптическую платформу относительно платформы для образцов, чтобы поместить систему в фокус. В некоторых примерах фактическую настройку фокуса, применяемую для того чтобы поместить образец в фокус, можно сравнить с моделью предиктивного фокуса, чтобы убедиться в точности модели. Кроме того, качество изображения может использоваться для измерения точности модели предиктивного фокуса. Эти методы можно использовать, например, для гарантии того, что шум в системе не повлияет на измерения. Эти методы также можно использовать для уточнения алгоритмов предиктивного фокуса. Там, где шум или другие условия влияют на целостность модели предиктивного фокуса, эту функцию можно временно отключить, пока условия не будут скорректированы.
[0044] Как отмечено выше, в некоторых примерах внеосевые оптические пучки, такие как, например, лазерные пучки, могут быть направлены на кассету для образцов (например, кассету 110 для образцов), чтобы определить установочные параметры фокуса для местоположений кассеты для образцов, отличных от текущего местоположения образца. Например, фокусировочные пучки могут быть направлены спереди от текущего местоположения образца (то есть в направлении сканирования), чтобы измерить требуемую настройку фокуса для одного или более местоположений за пределами текущего местоположения образца. В других примерах один или более пучков можно направить в прямом, обратном или боковом направлениях для сбора информации о фокусе для различных точек в дополнение к настройке фокуса или вместо нее для непосредственно следующего местоположения образца. Эти дополнительные внеосевые пучки можно использовать для определения настроек фокуса для нескольких положений на кассете для образцов (например, для других местоположений образца), и эта информация может быть сохранена и использована для предиктивного определения фокуса.
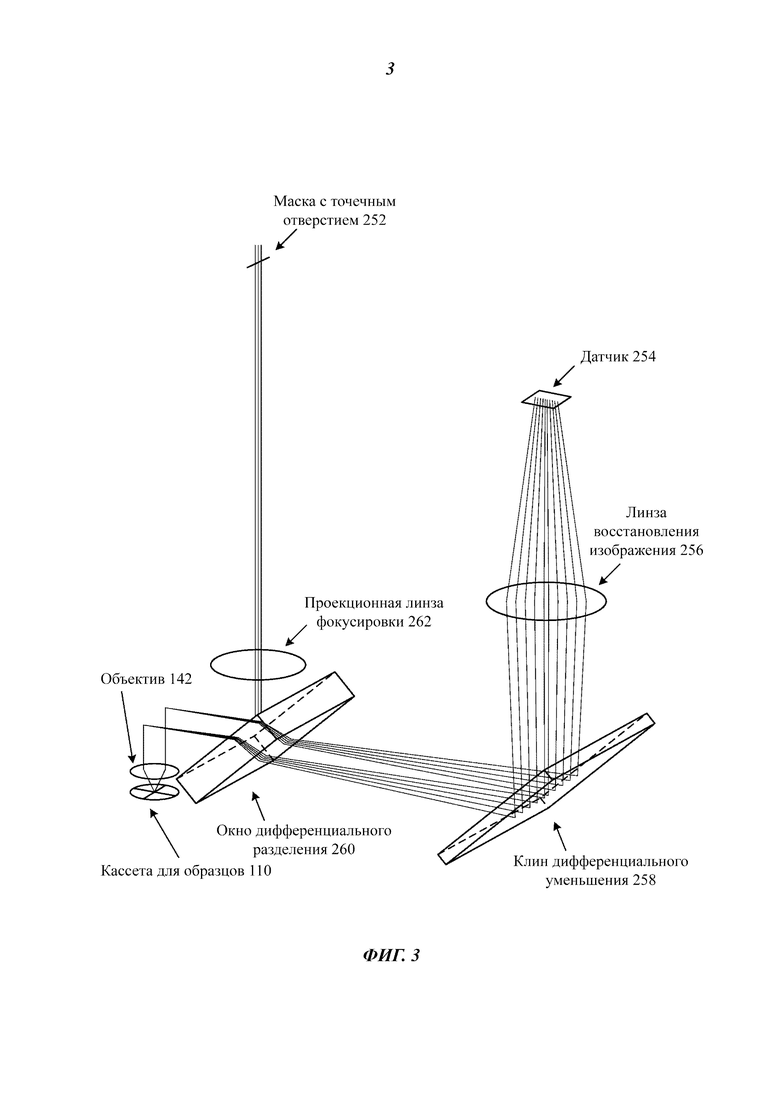
[0045] На фиг. 3 представлена схема, иллюстрирующая пример оптической конструкции для предиктивного отслеживания фокуса в соответствии с одним примером систем и способов, раскрытых в настоящем документе. Обратимся сейчас к фиг. 3, где эта примерная система включает в себя кассету 110 для образцов, которая в этом примере представляет собой проточную ячейку, и объектив 142, который используется, чтобы фокусировать свет для формирования изображения и для фокусировки на требуемых местоположениях кассеты 110 для образцов. В этом примере также предусмотрена маска 252 с точечным отверстием, датчик 254 изображений, линза 256 восстановления изображения, клин 258 дифференциального уменьшения, окно 260 дифференциального разделения и проекционную линзу 262 фокусировки.
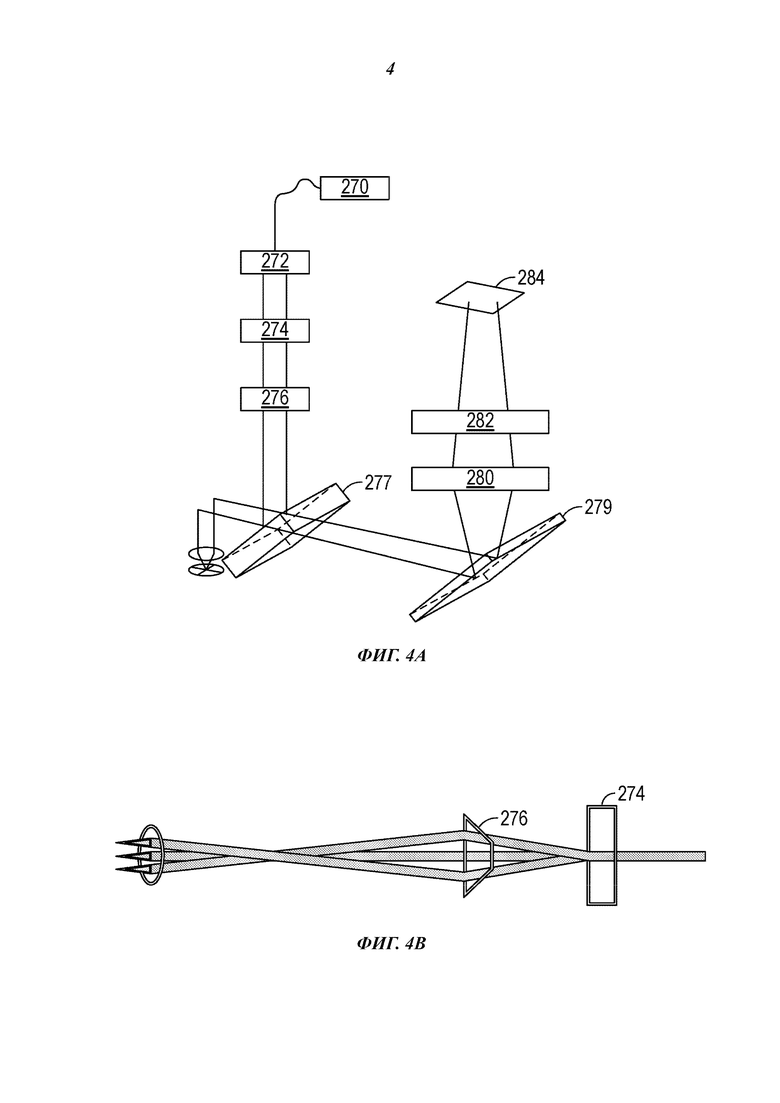
[0046] На фиг. 4, которая включает в себя фиг. 4А и 4В, представлен другой пример оптической системы для предиктивного отслеживания фокуса в качестве альтернативы системе, представленной на фиг. 3. В частности, на фиг. 4А представлен другой пример оптической конструкции для предиктивного отслеживания фокуса. На фиг. 4В представлена схема, иллюстрирующая альтернативный вид части оптической системы, показанной на фиг. 4А. Чтобы избежать загромождения и облегчить понимание читателем, в примере, представленном на фиг. 4А, показан единственный пучок, который в этом случае является центральным пучком. Специалисту в данной области техники будет понятно, как эта система будет работать с более чем одним пучком, например, с тремя пучками, как на фиг. 3. Как раскрыто, трехпучковая система может обеспечивать отслеживание последующего и предыдущего фокуса.
[0047] На фиг. 4 показано, что лазер 270 генерирует свет для пучков фокусировки и оптически связан с системой. Свет от лазера 270 может быть передан по оптоволокну, например, к призме 272 светоделителя, например, светоделителя с боковым смещением. При необходимости можно предусмотреть фильтры, например, для выбора источника. Призма 272 делит передаваемый пучок на два, по существу, параллельных световых пятна примерно одинаковой интенсивности. Это может быть предусмотрено для обеспечения дифференциальных измерений в модели фокусировки.
[0048] Дифракционная решетка 274 генерирует множество копий входных пучков. В других примерах для генерирования множества пучков можно использовать светоделительный куб или множество лазерных источников. В случае трехпучковой системы дифракционная решетка 274 может генерировать три выходных пучка для каждого из двух входных пучков. Пример этого для одного входного пучка показан на фиг. 4В. Поскольку дифракционная решетка может генерировать расходящиеся пучки (как также показано на фиг. 4В), призма 276 с плоской вершиной, или призма Дове, перенаправляет множество пучков. В некоторых примерах призма выполнена так, что пучки сходятся на зрачке объектива 142 так, что пучки на кассете для образцов являются нормальными к кассете для образцов. Пример этого для конфигурации с тремя выходными пучками показан на фиг. 4В. Принятый сигнал от кассеты для образцов возвращается через светоделитель 277 и отражается от зеркала 279. Поскольку каждая пара пучков расходится, приемные призмы 280 и 282 объединяют световые пятна на фокальной плоскости датчика 284 изображения. В некоторых примерах они могут быть реализованы в виде призм Дове и Амичи для преломления и направления пучков, выходящих из объекта микроскопа для попадания на матрицу датчиков изображения. Призма Амичи может использоваться для преломления обратных пучков, чтобы объединить световые пятна в паре световых пятен на фокальной плоскости датчика изображения, и призму Дове для преломления последующих/предыдущих пар пятен, чтобы объединить все пары пятен на фокальной плоскости. С трехпучковым упреждением три пучка проходят через каждую из двух половин призмы Амичи. Однако, на другой оси, пучки расходятся, поэтому для их коррекции используется призма Дове.
[0049] В различных примерах, раскрытых выше со ссылкой на фиг. 3 и 4, различные оптические компоненты выполнены с использованием призм. Некоторые или все из них могут быть реализованы с использованием линз, однако призмы могут быть желательными, поскольку эти компоненты, как правило, менее чувствительны к смещению по сравнению со своими линзовыми аналогами. Призмы также могут быть более желательными, чем системы линз, поскольку призмы, как правило, более компактны и содержат меньше элементов.
[0050] Объектив 142 в примерах на фиг. 3 и 4 обеспечивает, в общем, круглое поле зрения на кассете для образцов. В одном из примеров центр поля зрения является текущим местоположением визуализируемого образца. Направление сканирования в пределах этого поля зрения обычно является осью х или у. Для рассмотрения предположим, что направлением сканирования будет направление у. Источник света, такой как светодиод или лазерный источник света (не показан), генерирует пучки фокусировки. В проиллюстрированном примере используются три пучка для обеспечения трехточечной дифференциальной внеосевой предиктивной оценки фокуса - один пучок для текущего местоположения образца и два дополнительных пучка для отслеживания последующего и предыдущего фокуса. Эти два дополнительных пучка используются для определения дистанции фокусировки вдоль оси z между оптической платформой и местоположениями образцов на кассете для образцов.
[0051] В одном из примеров один пучок направлен в текущее местоположение образца. Как отмечалось выше, в этом примере местоположение отображаемого в данный момент образца находится приблизительно в центре поля зрения объектива 142. Из двух дополнительных пучков фокусировки один направлен вдоль оси у впереди операции сканирования (т.е. в направлении +у), а другой направлен вдоль оси у позади текущего местоположения (т.е. в направлении -у). В одном из примеров два дополнительных пучка направлены в местоположения на расстоянии, которое составляет приблизительно одну треть расстояния от центра до края поля зрения впереди и позади текущего местоположения образца. В других примерах может быть предусмотрено некоторое, отличное от двух, число дополнительных пучков фокусировки. Например, как указано выше, один или более пучков, помимо центрального пучка, могут быть направлены в одном или более направлениях +х, -х, +у, -у, а также в направлениях +х, +у, +х, -у, -х, +у, -х, -у.
[0052] Информация от этих пучков может использоваться для сбора информации о множестве местоположений на кассете для образцов (например, кассете 110 для образцов). Эта информация может использоваться, например, для сбора и сохранения настроек фокуса для местоположений образцов на кассете для образцов в нескольких местоположениях образцов. Информация о фокусировке, полученная с использованием этих дополнительных фокусных пучков, также может быть использована для вычисления уклона кассеты для образцов в области, которая указывает степень изменения дистанции фокусировки кассеты для образцов. Например, в случае трехпучковой системы, система использует известное направление сканирования, чтобы определить, какой из дополнительных пучков является забегающим вперед, а какой -отстающим. Информация о фокусе от этих двух пучков и от центрального пучка дает три точки, по которым можно вычислить уклон кассеты для образцов в этой области. Если дополнительные пучки присутствуют и направлены в сторону, то уклон можно определить в направлениях х и у. Система может использовать уклон для прогнозирования изменений фокуса в прямом направлении и использовать эту информацию для определения одного или более параметров управляющего сигнала, подаваемого для приведения в действие привода. Например, управляющий выход может быть пропорционален уклону, обнаруженному в этой области. Например, там, где уклон больше, можно применять более высокие уровни тока, чтобы обеспечить более быстрое перемещение z-платформы в положение для следующего местоположения образца. Независимо от того, являются ли местоположения образца местоположениями вдоль непрерывного образца или дискретными местоположениями в кассете для образцов, эта информация о расстоянии фокусировки до позиционирования системы для сканирования следующего местоположения образца позволяет выполнять операцию фокусировки предиктивным образом.
[0053] В дополнительных примерах информацию об уклоне можно дополнительно использовать для выравнивания кассеты для образцов относительно оптической платформы. Это может быть сделано, например, путем наклона платформы для образцов. При выравнивании платформы для образцов относительно оптической платформы сканирование можно выполнять в направлениях х и у с незначительной дополнительной регулировкой в направлении z или вообще без нее. Поскольку кассета для образцов может быть неоднородной по всей ее площади, это выравнивание может выполняться непрерывно или регулярно по мере того, как выполняется сканирование, чтобы представить в систему формирования изображения относительно ровную поверхность образца. В различных примерах выравнивание может быть достигнуто с помощью трех или более приводов, каждый из которых приводится в действие независимо, чтобы обеспечить наклон платформы для образцов относительно оптической платформы.
[0054] На фиг. 5 представлен алгоритм, иллюстрирующий примерный процесс предиктивной фокусировки с использованием оптической системы, такой как оптическая система, показанная на фиг. 3. Процесс, показанный на фиг. 5 раскрыт в контексте фиг. 3 и в контексте примера трехточечной внеосевой конфигурации, имеющей центральный пучок фокусировки, идущий впереди пучок и идущий сзади пучок. На этапе 320 источник света (например, лазерный или светодиодный источник света) генерирует световой пучок фокусировки, который будет использоваться для операций предиктивной фокусировки. В некоторых вариантах применения световой пучок от лазера объединяется в оптоволокне, и выходное излучение оптоволокна коллимируется. На этапе 322 маска 252 с точечным отверстием освещается сзади (в случае по фиг. 3). В примере, показанном на фиг. 3, предусмотрены три точечных отверстия, соответствующие примерной системе трехточечной внеосевой предиктивной фокусировки.
[0055] В некоторых системах формирования изображения может быть предпочтительным разделить пучок фокусировки на два пучка и пропустить эти пучки через края объектива 142. В этой конфигурации, когда кассета 110 для образцов движется, и пучки фокусировки отражаются от кассеты 110 для образцов, их угол изменяется. Поскольку эта конфигурация обеспечивает более длинное плечо, движение кассеты 110 для образцов приводит к большему перемещению изображения на камере. Следовательно, изменения в направлении Z могут быть намного легче обнаружены на датчике изображения. Соответственно, на этапе 324 три пучка фокусировки разделяются на шесть пучков. В примере, показанном на фиг. 3, проекционная линза 262 фокусировки проецирует три пучка на окно 260 дифференциального разделения, а окно 260 дифференциального разделения разделяет их на шесть пучков - два в качестве центральных пучков, и для каждого - идущий впереди и идущий позади пучки. Соответственно, в некоторых примерах пучок фокусировки и дополнительные идущие впереди/позади/сбоку пучки могут быть разделены на два пучка каждый. В приведенном выше примере, где есть один центральный пучок, один идущий впереди пучок и один идущий позади пучок, эти три пучка будут разделены на шесть отдельных пучков.
[0056] На этапе 324 точечные отверстия отображаются на кассету 110 для образцов. В примере, показанном на фиг. 3, эти пучки разделяются посредством окна 260 дифференциального разделения на два пучка каждый, создавая в общей сложности шесть пучков. Окно 260 дифференциального разделения может быть выполнено в виде дифракционной решетки для разделения каждого пучка фокусировки, создавая тем самым множество пучков для каждого пучка фокусировки. Поскольку пучки от дифракционной решетки обычно расходятся, можно предусмотреть призму бокового смещения (не показана на фиг. 3), чтобы заставить эти пучки сходиться у входного зрачка объектива 142. Объектив 142 отображает эти пучки на кассету 110 для образцов. Как раскрыто выше, пучки могут быть отображены как центральный пучок, передний пучок и задний пучок.
[0057] На этапе 326, отражения от этих пучков отображаются на датчик изображения. Поскольку эти пучки могут быть расходящимися и, следовательно, не попасть в область датчика изображения, можно предусмотреть клин 258 дифференциального уменьшения и линзу 256 восстановления изображения, чтобы сфокусировать и разместить световые пятна на датчике изображения.
[0058] На этапе 328 на основании пучков, отображаемых на входной датчик можно рассчитать величину коррекции фокуса. Как отмечалось выше, информация о фокусе от точек в пределах поля зрения объектива может быть рассчитана и использована для определения величин коррекции фокуса. Например, информация о фокусе от трех пучков может быть использована для расчета уклона кассеты для образцов вдоль местоположений образца. Уклон может использоваться для вычисления одного или более параметров управляющего сигнала (например, уровня тока, уровня напряжения, рабочего цикла, времени включения и т.д.), чтобы привести в действие привод для регулировки платформы для образцов относительно оптической платформы для следующего местоположения образца. На этапе 330 коррекция фокуса выполняется путем предоставления установленного одного или более параметров управляющего сигнала на соответствующем уровне приводу.
[0059] Хотя это не показано на фиг. 3 или 4, специалист в данной области техники поймет после прочтения этого описания, что можно предусмотреть контроллер для управления операциями предиктивного отслеживания фокуса. В некоторых примерах можно использовать процессорную система, содержащую один или более процессоров, исполняющих программный код для управления операциями системы. Однако для высокоскоростных систем может быть предпочтительным использование аппаратного решения для управления операциями системы, например, использование одного или более из следующего: FPGA, ASIC, PLD, CPLD, PLA, PAL или других подобных схем,
[0060] Еще один подход к предиктивному отслеживанию фокуса, как отмечалось выше, использует сохраненную информацию о настройках фокуса данной кассеты для образцов для управления фокусировкой системы при работе в режиме реального времени. Например, кассету для образцов можно отсканировать, и определить настройки фокуса для каждого из множества местоположений образца на кассете для образцов. Фиг. 6 является схемой, иллюстрирующей примерный процесс для предиктивного отслеживания фокуса с использованием сохраненной информации в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе. Обратимся теперь к фиг. 6, где на этапе 360 сканируется кассета для образцов (например, кассета 110 для образцов). Во время этой операции сканирования измеряют настройки фокуса для каждого из множества местоположений образца на кассете для образцов. Для кассет для образцов, имеющих дискретные местоположения образцов, величину фокуса можно измерить в каждом из этих дискретных местоположений. Для кассет для образцов, содержащих непрерывный образец, настройки фокуса можно измерить в каждом из множества местоположений на кассете, где количество местоположений и расстояние между этими местоположениями можно определить на основании разрешения, требуемого для сканирования образца. На этапе 362 настройки фокуса для кассеты для образцов сохраняют. Они могут храниться в электронном виде в файле истории в памяти, чтобы их можно было вызывать для последующего использования во время операций сканирования. Файл истории или содержащаяся в нем информация может быть помечена как идентифицируемая как содержащая информацию о фокусе для этой конкретной кассеты для образцов.
[0061] На этапе 364 кассету для образцов загружают в систему сканирования для операций сканирования. Для фактических операций формирования изображения кассета для образцов будет содержать образец или образцы для формирования изображения. Кассета для образцов может содержать идентификатор для уникальной идентификации кассеты для образцов. В некоторых примерах кассеты для образцов могут быть идентифицированы по классу, в то время как в других примерах кассеты для образцов могут быть идентифицированы индивидуально. Идентификатор кассеты для образцов может быть введен в систему пользователем или может быть обнаружен оптическим или электронным образом, когда кассету для образцов загрузят в систему.
[0062] На этапе 366 извлекают сохраненные настройки фокуса для идентифицированной кассеты для образцов. В этой операции идентификация кассеты для образцов может использоваться для идентификации файла, который содержит сохраненные настройки фокуса для этой кассеты для образцов. После идентификации надлежащего файла истории, на этапе 368 сохраненные настройки, содержащиеся в этом файле, можно использовать для выполнения операций предиктивной фокусировки для сканирования, выполняемого с этой кассетой для образцов. Например, информацию об уклоне можно вычислить с использованием настроек фокуса, сохраненных в файле истории, и эту информацию об уклоне можно использовать для определения параметров управляющего сигнала, подаваемого на привод во время операций формирования изображения.
[0063] В раскрытых выше примерах информация предиктивного фокуса используется для определения разницы между настройкой фокуса для текущего местоположения образца и настройкой фокуса для будущего местоположения. Эта разница, которая может быть в виде сигнала ошибки, используется для генерирования управляющего сигнала, имеющего соответствующие параметры сигнала для приведения в действие привода, который перемещается к приводимой в действие платформе. Фиг. 7 является блок-схемой, иллюстрирующей примерную систему управления фокусом для отслеживания фокуса в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе. Эта примерная система управления фокусом включает в себя схему 432 отслеживания фокуса, которая предназначена для определения текущих и прогнозных настроек фокуса, которые используются для генерирования управляющего сигнала, который управляет контуром обратной связи отслеживания фокуса на z-платформе 434. Как показано в примере на фиг. 7, команды 452, основанные на разнице настроек фокуса, подаются на z-платформу 434.
[0064] В этом примере Z-платформа 434 выполнена с возможностью перемещать объектив 446 (например, объектив 142). Привод 444 перемещает оптическую платформу и, в частности, объектив 446, в ответ на управляющий сигнал, подаваемый усилителем 438 Z-платформы. Как отмечалось выше, привод 444 может включать в себя пьезоэлектрический привод, привод со звуковой катушкой, двигатель, или другие подобные приводы. Кодер 442 предоставляет информацию о положении привода и его движении. Эта информация 454 кодера может быть передана обратно через контроллер 436 z-платформы в схему 432 отслеживания фокуса и может использоваться при определении сигнала ошибки.
[0065] На фиг. 8 представлена схема, иллюстрирующая примерную архитектуру для контроллера z-платформы в соответствии с одним из примеров систем и способов, раскрытых в настоящем документе. Этот примерный контроллер включает в себя управление, как с прямой, так и с обратной связью, для генерирования управляющего сигнала для управления приводом платформы. В других примерах это может быть реализовано как пропорциональное, интегральное и производное (PID) управление, как для сигнала ошибки, так и для ветвей управления с прямой связью системы управления. Как показано в этом примере, разница между целевой настройкой фокуса и фактической настройкой фокуса вычисляется и подается в блок 488 управления. Информация позиционирования также отправляется через канал 476 прямой связи и добавляется к выходному сигналу блока 488 управления. Этот выходной сигнал из управляющей схемы в блоке 488 управления обеспечивает управляющий выходной сигнал, который используется для приведения в действие привода 490. Как показано, величина разницы между целевым положением фокуса и текущим фактическим положением предоставляется через канал 476 прямой связи для регулировки управляющего выходного сигнала.
[0066] На фиг. 9 представлена схема, иллюстрирующая другую примерную архитектуру для контроллера z-платформы в соответствии с одним примером систем и способов, раскрытых в настоящем документе. Этот пример также включает в себя управление обратной и прямой связью. Во время работы для управления положением платформы используется настройка целевого фокуса (например, целевое z-положение 570). Целевое z-положение 570 предоставляется контроллеру 588, который определяет управляющий сигнал, необходимый для управления исполнительным механизмом 590 для позиционирования платформы. Контроллер 588 также может включать в себя управляющую схему для генерирования управляющего сигнала. Определение управляющего сигнала выполняется с использованием величины разницы между заданной настройкой фокусировки (целевое z-положение 570) и текущей настройкой фокусировки (фактическое z-положение 572), которая может быть обеспечено, например, приводом 590. В этом примере, как и в предыдущем примере, управляющий сигнал, используемый для приведения в действие привода, регулируется сигналом из канала 576 управления с прямой связью. Однако в примере по фиг. 9, измеренный сигнал 578 коррекции фокуса генерируется схемой 592 отслеживания фокуса. Корректирующая информация может быть определена, например, с использованием упреждающего предиктивного отслеживания фокуса или предиктивного отслеживания фокуса на основании данных истории, как раскрыто выше, или с использованием других методов предиктивного отслеживания фокуса. Корректирующая информация добавляется к заданному положению платформы для регулировки управляющего сигнала в соответствии с уклоном изменения настройки фокуса для операций сканирования.
[0067] Как отмечалось выше, в различных примерах может использоваться привод для позиционирования платформы для образцов относительно оптической платформы путем изменения положения платформы для образцов, или оптической платформы (или их частей), или их обеих для достижения требуемой настройки фокуса. В некоторых примерах для перемещения требуемой платформы можно использовать пьезоэлектрические приводы. В других примерах для перемещения требуемой платформы можно использовать привод со звуковой катушкой. В некоторых вариантах применения использование привода со звуковой катушкой может обеспечить меньшую задержку фокусировки по сравнению с его пьезоэлектрическими аналогами. Когда используется привод со звуковой катушкой, размер катушки может быть выбран в качестве минимального размера катушки, необходимого для обеспечения требуемого перемещения, так что индуктивность в катушке также может быть минимизирована. Ограничение размера катушки и, следовательно, ограничение ее индуктивности обеспечивает более быстрое время реакции и требует меньшего напряжения для приведения в действие привода.
[0068] Как было раскрыто выше, независимо от используемого привода, информация о фокусе от точек, отличных от текущего местоположения образца, может использоваться для определения уклона или величины изменения в настройке фокуса для операций сканирования. Эту информацию можно использовать для определения, следует ли подавать управляющий сигнал на привод раньше, и как установить параметры управляющего сигнала. Кроме того, в некоторых примерах система может быть предварительно откалибрована, чтобы можно было определить пороговые управляющие значения для привода. Например, система может быть выполнена с возможностью подачи на привод управляющих сигналов при разных уровнях управляющего выхода, чтобы определить максимальную величину управляющего выхода (например, максимальную величину управляющего тока), которую может выдержать привод, не выходя из строя. Это может позволить системе определить максимальную величину управляющего выхода, которая будет применена к приводу.
[0069] Хотя выше были раскрыты различные примеры заявленного технического решения, следует понимать, что они представлены только в качестве примера, а не ограничения. Аналогично, различные схемы могут изображать примерную архитектурную или другую конфигурацию для заявленного технического решения, чтобы помочь в понимании признаков и функциональных возможностей, которые могут быть включены в заявленное техническое решение. Заявленное техническое решение не ограничено представленными примерными архитектурами или конфигурациями, а требуемые признаки могут быть реализованы с использованием множества альтернативных архитектур и конфигураций. Действительно, для специалиста в данной области техники будет очевидно, как можно реализовать альтернативные функциональные, логические или физические разбиения и конфигурации для реализации требуемых признаков технического решения, раскрытого в настоящем документе. Кроме того, к различным разбиениям можно применить множество различных наименований составляющих модулей, отличных от представленных в настоящем документе. Кроме того, что касается блок-схем, эксплуатационных описаний и пунктов формулы изобретения, порядок, в котором представлены этапы в настоящем документе, не должен предписывать реализацию различных примеров с выполнением перечисленных функциональных возможностей в том же порядке, если контекст не предписывает иное.
[0070] Хотя заявленное техническое решение раскрыто выше применительно к различным иллюстративным примерам и реализациям, следует понимать, что различные признаки, аспекты и функциональные возможности, раскрытые в одном или более отдельных примерах, не ограничены в их применимости к конкретному примеру, с помощью которого они раскрыты, а вместо этого применимы, отдельно или в различных комбинациях, к одному или более другим примерам заявленного технического решения, независимо от того, раскрыты ли такие примеры, и представлены ли такие признаки как часть описанного примера. Таким образом, широта и объем технического решения, раскрытого в настоящем документе, не должны ограничиваться ни одним из раскрытых выше иллюстративных примеров. Следует принимать во внимание, что все комбинации вышеупомянутых концепций (при условии, что такие концепции не являются взаимно несовместимыми) рассматриваются как часть предмета изобретения, раскрытого в настоящем документе. В частности, все комбинации заявленного предмета изобретения, приведенные в конце этого раскрытия, рассматриваются как часть предмета изобретения, раскрытого в настоящем документе.
[0071] Термины и выражения, используемые в этом документе, и их варианты, если прямо не указано иное, следует рассматривать как открытые, а не как ограничивающие. В качестве примеров вышеизложенного: термин «включающий в себя» следует понимать как означающий «включающий в себя без ограничений» или тому подобное; термин «пример» используется для предоставления иллюстративных примеров обсуждаемого предмета, а не его исчерпывающего или ограничивающего списка; термин «один» (соответствует неопределенному артиклю в английском оригинале) следует понимать как «по меньшей мере один», «один или более» или тому подобное; а прилагательные, такие как «обычный», «традиционный», «нормальный», «стандартный», «известный» и термины схожего значения, не должны рассматриваться как сводящие предмет к описанному до данного периода времени, или предметом, доступным в данное время, но вместо этого следует рассматривать как охватывающие обычные, традиционные, нормальные или стандартные технические решения, которые могут быть доступны или известны сейчас или в любое время в будущем. Термин «содержащий» используется в настоящем документе, как открытый, включая не только перечисленные элементы, но также любые дополнительные элементы. Аналогичным образом, когда этот документ относится к техническим решениям, которые будут очевидны или известны специалисту в данной области техники, такие технические решения охватывают те решения, которые очевидны или известны специалисту в данной области сейчас или в любое время в будущем.
[0072] Термин «связанный» относится к прямому или опосредованному соединению, подключению, прикреплению, контакту или связи и может относиться к различным видам связи, таким как физическая, оптическая, электрическая, гидропневматическая, механическая, химическая, магнитная, электромагнитная, коммуникативная или другая связь, или комбинация вышеперечисленного. Если указана одна форма связи, это не означает, что другие виды связи исключены. Например, один компонент, физически связанный с другим компонентом, может ссылаться на физическое присоединение или контакт между двумя компонентами (прямо или опосредованно), но не исключает другие формы связи между компонентами, такие как, например, канал связи (например, радиочастотный или оптический канал) также коммуникативно связывающие два компонента. Кроме того, подразумевается, что различные термины сами по себе не являются взаимоисключающими. Например, гидропневматическая связь, магнитная связь или механическая связь, помимо прочего, могут быть формой физической связи.
[0073] Наличие в некоторых случаях расширяющихся слов и фраз, таких как «один/одна/одно или более», «по меньшей мере», «но не ограничивается» или других подобных фраз, не должно читаться как означающее, что более узкий случай подразумевается или требуется в случаях, когда такие расширяющие фразы могут отсутствовать. Использование термина «компонент» не подразумевает, что все элементы или функциональные возможности, описанные или заявленные как часть компонента, все сконфигурированы в общем пакете. Действительно, любой или все из различных элементов компонента, включая конструктивные элементы, могут быть объединены в один пакет или поддерживаться отдельно, и могут дополнительно распределяться по нескольким группам или пакетам.
[0074] Кроме того, различные примеры, изложенные в настоящем документе, описаны в терминах примерных схем и других иллюстраций. Как станет понятно специалисту в данной области техники после прочтения этого документа, проиллюстрированные примеры и их различные альтернативы могут быть реализованы без ограничения проиллюстрированными примерами. Например, блок-схемы и сопровождающее их описание не должны рассматриваться как обязательные для конкретной архитектуры или конфигурации.
[0075] Следует принимать во внимание, что все комбинации вышеизложенных концепций и дополнительных концепций, обсуждаемых более подробно ниже (при условии, что такие концепции не являются взаимно несовместимыми), рассматриваются как часть предмета изобретения, раскрытого в настоящем документе. В частности, все комбинации заявленного предмета изобретения, приведенные в конце этого раскрытия изобретения, рассматриваются как часть предмета изобретения, раскрытого в настоящем документе.
Изобретение относится к устройствам и способам для предиктивного отслеживания фокуса. Система формирования изображения включает платформу для образцов, имеющую поверхность для поддержки кассеты для образцов, при этом кассета для образцов содержит множество местоположений образцов; оптическую платформу, содержащую объектив, причем оптическая платформа выполнена с возможностью позиционирования относительно платформы для образцов для получения изображения образцов в местоположениях образцов; привод, физически связанный с по меньшей мере одной из платформы для образцов и оптической платформы, чтобы перемещать платформу для образцов относительно оптической платформы, чтобы фокусировать оптическую платформу на текущее местоположение образца; управляющую схему для определения настройки фокуса для следующего местоположения образца и для подачи управляющего сигнала на привод до позиционирования оптической платформы для получения изображения образца в следующем местоположении образца. По меньшей мере один параметр управляющего сигнала определен с использованием разницы между настройкой фокуса для текущего местоположения образца и настройкой фокуса, определенной для следующего местоположения образца. Изобретение обеспечивает увеличение скорости фокусировки. 3 н. и 28 з.п. ф-лы, 10 ил.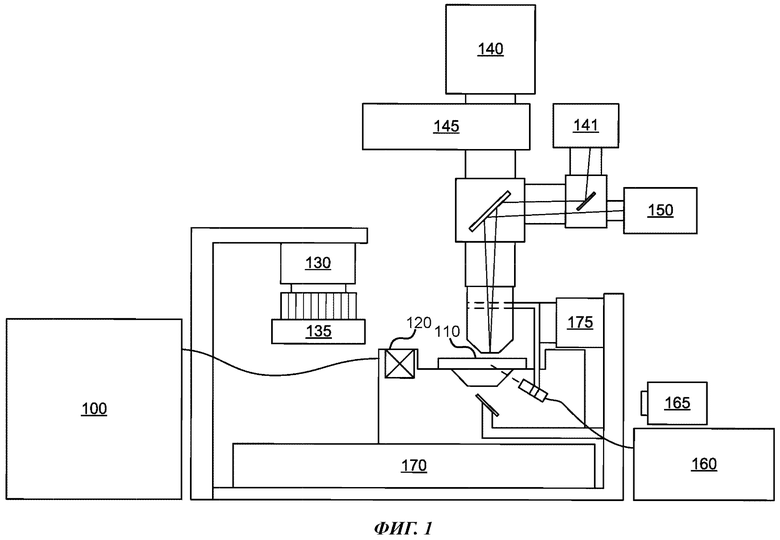
1. Система формирования изображения, содержащая:
платформу для образцов, имеющую поверхность для поддержки кассеты для образцов, причем кассета для образцов содержит множество местоположений образцов;
оптическую платформу, содержащую объектив, причем оптическая платформа выполнена с возможностью позиционирования относительно платформы для образцов для получения изображения образцов в местоположениях образцов;
привод, физически связанный по меньшей мере с одной из платформы для образцов и оптической платформы, чтобы перемещать платформу для образцов относительно оптической платформы, чтобы фокусировать оптическую платформу на текущее местоположение образца; и
управляющую схему для определения настройки фокуса для следующего местоположения образца и для подачи управляющего сигнала на привод до позиционирования оптической платформы для получения изображения образца в следующем местоположении образца, при этом по меньшей мере один параметр управляющего сигнала определен с использованием разницы между настройкой фокуса для текущего местоположения образца и настройкой фокуса, определенной для следующего местоположения образца.
2. Система формирования изображения по п. 1, в которой привод физически связан с платформой для образцов, чтобы перемещать платформу для образцов для регулирования расстояния между платформой для образцов и оптической платформой.
3. Система формирования изображения по п. 1, дополнительно содержащая множество приводов, физически связанных с платформой для образцов, чтобы регулировать наклон платформы для образцов.
4. Система формирования изображения по п. 1, в которой привод физически связан с оптической платформой, чтобы перемещать оптическую платформу для регулирования расстояния между платформой для образцов и оптической платформой.
5. Система формирования изображения по п. 1, в которой привод содержит по меньшей мере одно из пьезоэлектрического устройства, звуковой катушки и приводного двигателя.
6. Система формирования изображения по п. 1, в которой настройка фокуса для следующего местоположения образца определена с использованием файла истории, содержащего заданную настройку фокуса для каждого из множества местоположений образцов.
7. Система формирования изображения по п. 6, в которой файл истории создан путем измерения дистанции фокусировки до каждого из множества местоположений образцов во время предыдущей операции формирования изображения.
8. Система формирования изображения по п. 1, дополнительно содержащая систему внеосевой фокусировки для излучения светового пучка, попадающего на следующее местоположение образца до позиционирования по меньшей мере одной из оптической платформы и платформы для образцов, чтобы получить изображение образца в следующем местоположении.
9. Система формирования изображения по п. 8, в которой система внеосевой фокусировки содержит источник света и окно дифференциального разделения для разделения света, излучаемого источником света, для внеосевого формирования изображения.
10. Система формирования изображения по п. 8, в которой система внеосевой фокусировки содержит источник света, маску с точечным отверстием, расположенную на пути света, излучаемого источником света, и окно дифференциального разделения для разделения света, излучаемого из источника света, для внеосевого формирования изображения.
11. Система формирования изображения по п. 8, в которой система внеосевой фокусировки выполнена с возможностью генерировать множество световых пучков, чтобы обеспечить внеосевую дискретизацию в более чем одном направлении сканирования.
12. Система формирования изображения по п. 11, дополнительно содержащая уменьшающий клин для обеспечения перенаправления отражений внеосевых пучков в требуемую область на датчике изображения.
13. Система формирования изображения по п. 1, в которой кассета для образцов содержит проточную ячейку или слайд.
14. Система формирования изображения по п. 1, в которой по меньшей мере один параметр управляющего сигнала содержит по меньшей мере одно из тока, напряжения и рабочего цикла.
15. Способ отслеживания фокуса, включающий в себя следующее:
определяют первое находящееся в фокусе положение платформы для образцов для текущего местоположения образца на сканируемой кассете для образцов;
определяют второе находящееся в фокусе положение указанной платформы для следующего местоположения образца, подлежащего сканированию;
вычисляют разницу между первым и вторым находящимися в фокусе положениями; и
отправляют управляющий сигнал на привод платформы, чтобы переместить платформу для образцов относительно оптической платформы из первого находящегося в фокусе положения во второе находящееся в фокусе положение в момент времени t до того, как платформа будет позиционирована для получения изображения в следующем местоположении образца, причем по меньшей мере один параметр управляющего сигнала определяют с использованием разницы между первым и вторым находящимися в фокусе положениями.
16. Способ по п. 15, в котором определение второго находящегося в фокусе положения платформы включает в себя запрос файла истории, содержащего заданную настройку фокуса для каждого из множества наборов координат на кассете для образцов.
17. Способ по п. 16, в котором файл истории создают путем измерения дистанции фокусировки до каждого из множества наборов координат на кассете для образцов во время предыдущей операции формирования изображения.
18. Способ по п. 15, дополнительно включающий вычисление уклона кассеты для образцов на основании разницы между первым и вторым находящимися в фокусе положениями, причем параметр управляющего сигнала определяют с использованием уклона.
19. Способ по п. 18, дополнительно включающий определение третьего находящегося в фокусе положения платформы для ранее отсканированного местоположения образца.
20. Способ по п. 19, в котором уклон кассеты для образцов определяют с использованием первого, второго и третьего находящихся в фокусе положений.
21. Способ по п. 15, в котором определение второго находящегося в фокусе положения включает в себя использование внеосевой системы фокусировки для излучения светового пучка, падающего на следующее местоположение образца до того, как по меньшей мере одно из оптической платформы и платформы для образцов будет позиционировано для получения изображения образца в следующем местоположении.
22. Способ по п. 15, в котором перемещение платформы для образцов относительно оптической платформы из первого находящегося в фокусе положения во второе находящееся в фокусе положение включает в себя перемещение платформы для образцов для регулирования расстояния между образцом и оптической платформой.
23. Способ по п. 15, в котором перемещение платформы для образцов относительно оптической платформы из первого находящегося в фокусе положения во второе находящееся в фокусе положение включает в себя перемещение оптической платформы для регулирования расстояния между образцом и оптической платформой.
24. Способ по п. 15, в котором время t определяют с использованием разницы между первым и вторым находящимися в фокусе положениями.
25. Способ по п. 15, в котором привод платформы содержит звуковую катушку, при этом способ дополнительно включает определение максимальной величины управляющего выхода, которая может быть подана на звуковую катушку, и ограничение величины тока в управляющем сигнале с использованием максимальной величины управляющего выхода.
26. Способ по п. 15, в котором по меньшей мере один параметр управляющего сигнала содержит по меньшей мере одно из тока, напряжения и рабочего цикла.
27. Способ отслеживания фокуса, включающий в себя следующее:
определяют первое находящееся в фокусе положение платформы для образцов для текущего местоположения образца на сканируемой кассете для образцов;
определяют второе находящееся в фокусе положение указанной платформы для следующего местоположения образца, подлежащего сканированию;
вычисляют уклон кассеты для образцов с использованием первого и второго находящихся в фокусе положений; и
отправляют управляющий сигнал на привод платформы для перемещения платформы для образцов относительно оптической платформы, причем управляющий сигнал генерируют с использованием уклона кассеты для образцов.
28. Способ по п. 27, дополнительно включающий определение третьего находящегося в фокусе положения платформы для ранее отсканированного местоположения образца, при этом уклон вычисляют с использованием первого, второго и третьего местоположений образца.
29. Способ по п. 27, в котором определение второго находящегося в фокусе положения включает запрос файла истории, содержащего заданную настройку фокуса для каждого из множества наборов координат на кассете для образцов.
30. Способ по п. 27, в котором файл истории создают путем измерения дистанции фокусировки до каждого из множества наборов координат на кассете образцов во время предыдущей операции формирования изображения.
31. Способ по п. 27, в котором определение второго находящегося в фокусе положения включает в себя использование внеосевой системы фокусировки для излучения светового пучка, попадающего на следующее местоположение образца до того, как по меньшей мере одна из оптической платформы и платформы для образцов будет позиционирована для формирования изображения образца в следующем местоположении.
| US 2004129858 A1, 08.07.2004 | |||
| Стенд для испытания моделей зубьев на долговечность | 1982 |
|
SU1352283A1 |
| US 5404163 A, 04.04.1995. | |||

