Изобретение относится к авиационной технике, а именно к летательным аппаратам вертикального/короткого взлета и посадки. Предназначено для конвертопланов, снабженных реактивно-компрессорным приводом несущего винта, складываемого и раскрываемого в полете.
Известны летательные аппараты вертикального взлета и посадки со складывающимися в полете несущими винтами.
В проекте фирмы Bell (США) (Ф.П. Курочкин. «Проектирование и конструирование самолетов с вертикальным взлетом и посадкой», изд. Мащиностроение, 1977 г. Стр. 20, 22) предлагалось при достижении скорости перехода винт, имеющий переменный компенсатор взмаха, затормаживать и с помощью бустерных устройств устанавливать лопасти по потоку, а затем после разворота убирать их в гондолу гаргрота фюзеляжа с последующим закрытием ее створок.
Недостатком конструкции является исключение преобразующей энергии аэродинамических сил из процесса выпуска и уборки несущего винта, а также невозможность автоматического выпуска и раскрутки лопастей несущего винта в режиме авторотации при отказе двигателей.
В проекте фирмы Мессершмидт МеР.2020-4 (Ф.П. Курочкин. «Проектирование и конструирование самолетов с вертикальным взлетом и посадкой», изд. Мащиностроение, 1977 г. Стр. 123, 124) после взлета несущие винты на консолях крыла постепенно останавливаются и их лопасти складываются по потоку. Втулка винта смещается вперед по полету, а лопасти, сложенные вместе, частично закрываются обтекателем в виде створок.
Недостаток такого решения состоит в том, что в крейсерском полете открытая часть пакета сложенных лопастей все время находится в турбулентном воздушном потоке, который индуцирует их многочастотные колебания с взаимными ударами, что приводит к их ускоренному износу.
Наиболее близким аналогом, настоящего изобретения является проект фирмы Bell (Ф.П. Курочкин. «Основы проектирования самолетов с вертикальным взлетом и посадкой», изд. Мащиностроение, 1977 г. Стр. 27, 28), в котором после взлета и увеличения горизонтальной скорости, отключается подвод мощности к двум консольным несущим винтам диаметром 11,6 м. Оси вращения винтов начинают отклоняются назад с переходом в режим авторотации. Далее угол наклона оси винтов и угол установки лопастей увеличивается до тех пор, пока лопасти не перейдут во флюгерное положение. На завершающем участке с помощью бустерных устройств лопасти задними кромками профилей сводятся вместе в положение по полету. Раскрытие несущих винтов перед посадкой производится в обратном порядке.
Проект имеет ряд недостатков:
- Уборку и выпуск несущего винта в полете практически можно надежно реализовать только в конвертопланах с одним несущим винтом. В двухвинтовых конвертопланах даже при наличии синхронизирующего вала между винтами из-за разницы в обтекании потоками воздуха, особенно при боковом ветре, будет неизбежно возникать опасный дисбаланс аэродинамических сил между левым и правым винтом, приводящий к трудно устранимой раскачке всего аппарата с высокой вероятностью его столкновения с землей. Подобный эффект периодически возникает на конвертоплане Osprei V-22 и уже стал причиной нескольких катастроф вблизи земли.
- Два несущих винта, работающие в режиме авторотации, являются источниками перекрестных связей в каналах управления по крену и по курсу, существенно усложняя процесс пилотирования. Так, увеличение угла атаки несущего винта с одной стороны с целью создания крена одновременно увеличивает его аэродинамическое сопротивление с образованием разворачивающего курсового момента в сторону этого винта, который, к тому же, трудно парировать на малых поступательных скоростях полета.
- В полете сложенные лопасти не убираются в гондолу, а остаются в турбулентном потоке с возможностью взаимных колебаний своих консолей, т.к. число лопастей только три, а автоматическая взаимная фиксация консолей задними кромками профилей происходит при числе лопастей пять и более.
- Несущие винты проекта нуждаются в сложном и тяжелом механическом приводе с двойным комплектом редукторов и трансмиссией, причем кроме синхронизирующего вала между винтами требуется еще синхронизация углов поворота осей противоположных несущих винтов.
- Складывание и раскрытие лопастей несущих винтов не предусматривает синхронизации их взаимного углового движения. Это приводит к тому, что на завершающем участке уборки винта схождение лопастей в пакет происходит в разнобой с ударами по задним кромкам профилей.
Задачей изобретения является создание конструкции складывающегося и раскрывающегося в полете несущего винта, с реактивно-компрессорным приводом, для одновинтового конвертоплана с повышенной надежностью и безопасностью применения.
Задача изобретения решается тем, что втулка винта закреплена на ползуне, который имеет свободу перемещения вдоль оси вращения винта, автомат перекоса размещен на поверхности ползуна и имеет свободу перемещения по ней при изменении общего шага лопастей с помощью поводковых тяг, а каждая лопасть связана синхронизирующей механической связью с торцом оси вращения винта посредством равных шарнирных тяг, в свою очередь основание ползуна имеет силовую связь с механизмом углового поворота оси вращения винта из убранного положения в рабочее и обратно, при этом передаточными числами звеньев общей кинематической связи угла поворота оси вращения винта с углом конуса лопастей и с углом шага лопастей обеспечена возможность согласованного аэродинамического взаимодействия несущего винта с набегающим воздушным потоком в процессе складывания или раскрытия несущего винта в полете.
Полученный технический результат характеризуется следующими существенным признаками:
- втулка винта закреплена на ползуне, который имеет свободу перемещения вдоль оси вращения винта,
- автомат перекоса размещен на поверхности ползуна и имеет свободу перемещения по ней при изменении общего шага лопастей с помощью поводковых тяг,
- каждая лопасть связана синхронизирующей механической связью с торцом оси вращения винта посредством равных шарнирных тяг,
- основание ползуна имеет силовую связь с механизмом углового поворота оси вращения винта из убранного положения в рабочее и обратно,
- передаточными числами звеньев общей кинематической связи угла поворота оси вращения винта с углом конуса лопастей и с углом шага лопастей обеспечена возможность согласованного аэродинамического взаимодействия несущего винта с набегающим воздушным потоком в процессе складывания или раскрытия несущего винта в полете.
На Фиг. 1 показан модуль несущего винта в сложенном виде при положении его в закрытой гондоле.
На Фиг. 2 показан модуль несущего винта в начале процесса выпуска при выходе его из гондолы.
Устройство несущий винта, складывающийся и раскрывающийся в полете по Фиг. 1 и Фиг. 2 включает: лопасти (1), распределитель воздуха (2), составные шарнирные тяги-воздуховоды (3), рукава лопастей (4) с поводками (5) и поводковыми тягами (6). Поводковые тяги (6) шарнирно закреплены на автомате перекоса (7), который установлен на ползуне (8).
Основание (9) ползуна (8) имеет силовую связь с механизмом уборки/выпуска несущего винта (10) и кулачком (11) стягивания лопастей (1) в убранном положении. Основание (9) служит также местом установки исполнительных агрегатов (12) управления автоматом перекоса (7). На ползуне (8) в подшипниках установлена втулка несущего винта (13). Ползун (8) имеет свободу перемещения по оси вращения (14) несущего винта, которая одновременно служит каналом для сжатого воздуха (газа), поступающего к несущему винту через внутренние проходные сечения поворотного узла (15). Ось вращения (14) несущего винта имеет интервал поворота на угол от 0 до 90 градусов. Такой же интервал поворота, связанный с осью вращения (14), имеют лопасти (1) несущего винта.
Устройство несущего винта, складывающегося и раскрывающегося в полете работает следующим образом (Фиг. 1, 2):
В исходном положении перед выпуском лопасти (1) сведены друг с другом по задним кромкам профилей, механизм уборки/выпуска (10) стоит на упоре кулачка (11), фиксирующем ползун (8) НВ в крайнем левом положении с расчетным осевым усилием. Расчетное усилие необходимо, чтобы лопасти (1), сведенные по задним кромкам, образовали жесткую многореберную балку, которая безопасно выводится и заводится в гондолу и компактно помещается в ней на мягких концентрических ложементах. Исходное положение сложенных лопастей является флюгерным, т.е. образованная многореберная балка, будучи помешенной в косой воздушный поток, не генерирует вращающий момент.
В прямом цикле, после подачи сигнала «Выпуск», открываются створки гондолы и шток механизма (10) начинает выдвигаться, поднимая посредством основания ползуна (9) ось вращения винта (14) в направлении роста угла β (Фиг. 2) и, одновременно, сдвигая втулку (13) с ползуном (8) по оси вправо. Тяги-воздуховоды (3), передавая усилие рукавам (4) лопастей (1), и упираясь через поводковые тяги (6) в стыковочные узлы автомата перекоса (7), отклоняют лопасти (1) в направлении роста угла α, образуя расширяющийся конус несущего винта. Поводковые тяги (6) имеют косой упор в поводки (5) лопастей (1). Благодаря этому раскрытие конуса несущего винта сопровождается синхронным поворотом профилей лопастей (1) и их соответствующим взаимодействием с набегающим потоком сначала в режиме ветряка и далее с переходом в авторотирующий режим обтекания. В результате на лопастях возникает и быстро нарастает вращающий момент, который в цикле раскрытия конуса несущего винта разгоняет винт до полетных оборотов. Одновременно растет вектор полной аэродинамической силы несущего винта, который, действуя по оси вращения (14), суммируется с вектором полной аэродинамической силы крыла конвертоплана.
На переходных режимах стабилизатор конвертоплана создает положительную подъемную силу, т.к. до момента достижения вертикального положения оси вращения (14) линия действия полной аэродинамической силы несущего винта проходит выше центра тяжести конвертоплана. Важным следствием этого является то, что в начале выпуска или в конце уборки несущего винта хвостовая часть фюзеляжа конвертоплана и узкий конус упругих лопастей (1), на которых в этом секторе практически отсутствует центробежная силы, стремятся симметрично отдалиться друг от друга в набегающем воздушном потоке, уменьшая опасность сближения колеблющихся концов лопастей с поверхностью фюзеляжа и створок гондолы.
В обратном цикле, после подачи в механизм (10) сигнала «Уборка», его шток начинает задвигаться, опуская ось вращения (14) несущего винта в направлении уменьшения угла (3 (Фиг. 2), одновременно, сдвигая ползун (8) и втулку (13) по оси (14) влево. Весь процесс взаимодействия лопастей с набегающим потоком проходит в обратном порядке. Конус несущего винта сужается, вращающий момент снижается, обороты винта падают. Отличие в аэродинамике процесса уборки только в задаваемом системой управления алгоритме изменения углов атаки профилей лопастей (1), которые должны создавать тормозящие составляющие углового движения с таким расчетом, чтобы к моменту поворота оси несущего винта на 80-85 градусов обороты несущего винта были близки к 0. В момент сведения лопастей (1) по задним кромкам с упором выступа основания (9) в кулачок (11) с расчетным усилием их пакет приобретает жесткость продольной многореберной балки, которая в конце цикла уборки мягко и точно заводится в гондолу. Процесс складывания завершается закрытием створок.
Предложенное устройство несущего винта, складывающегося и раскрывающегося в полете, позволило:
- Обеспечить высокий уровень надежности процесса уборки и выпуска несущего винта в полете у одновинтового конвертоплана.
- Устранить возможность перекрестных связей в каналах управления по крену и курсу, существенно упростив процесс пилотирования аппарата.
- Разместить сложенный несущий винт в закрытой гондоле гаргрота фюзеляжа и обеспечить длительную сохранность частей его конструкции благодаря тому, что внутренний объем гондолы обогреваемый, защищен от ветра, дождя и снега, лопасти не подвергаются прямому воздействию солнечных лучей и действию турбулентного потока в крейсерском полете.
- Использовать не менее пяти лопастей для обеспечения их автоматической взаимной фиксации по задним кромкам в убранном положении.
- Исключить сложный и тяжелый механический привод несущего винта с двойным комплектом редукторов и трансмиссий путем оптимизации конструкции складной системы под реактивно-компрессорный привод.
- Обеспечить процесс складывания и раскрытия несущего винта жесткой синхронизацией взаимного углового движения лопастей.


Изобретение относится к авиационной технике, а именно к летательным аппаратам вертикального/короткого взлета и посадки, и предназначено для конвертопланов, снабженных реактивно-компрессорным приводом несущего винта. Несущий винт, складывающийся и раскрывающийся в полете, включает лопасти изменяемого шага, втулку винта с горизонтальными шарнирами, ось вращения несущего винта, автомат перекоса и элементы управления циклическим шагом. Втулка винта закреплена на ползуне, который имеет свободу перемещения вдоль оси вращения винта. Автомат перекоса размещен на поверхности ползуна и имеет свободу перемещения по ней при изменении общего шага лопастей с помощью поводковых тяг. Каждая лопасть связана синхронизирующей механической связью с торцом оси вращения винта посредством равных шарнирных тяг. Основание ползуна имеет силовую связь с механизмом углового поворота оси вращения винта из убранного положения в рабочее и обратно. Обеспечивается высокий уровень надежности процесса уборки и выпуска несущего винта в полете у одновинтового конвертоплана, устранение возможности перекрестных связей в каналах управления по крену и курсу. 2 ил.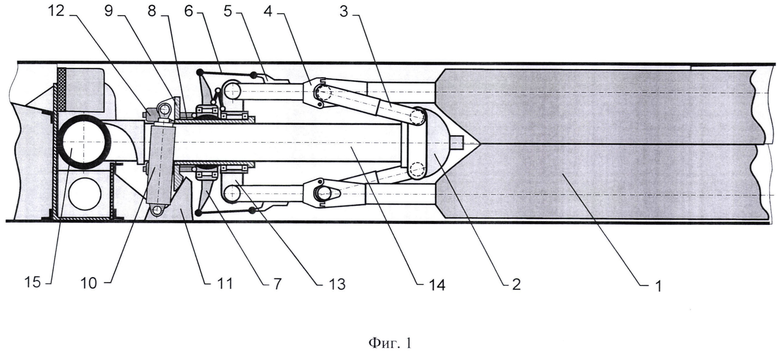
Несущий винт, складывающийся и раскрывающийся в полете, включающий лопасти изменяемого шага, втулку винта с горизонтальными шарнирами, ось вращения несущего винта, автомат перекоса и элементы управления циклическим шагом, отличающийся тем, что втулка винта закреплена на ползуне, который имеет свободу перемещения вдоль оси вращения винта, автомат перекоса размещен на поверхности ползуна и имеет свободу перемещения по ней при изменении общего шага лопастей с помощью поводковых тяг, а каждая лопасть связана синхронизирующей механической связью с торцом оси вращения винта посредством равных шарнирных тяг, в свою очередь основание ползуна имеет силовую связь с механизмом углового поворота оси вращения винта из убранного положения в рабочее и обратно, при этом передаточными числами звеньев общей кинематической связи угла поворота оси вращения винта с углом конуса лопастей и с углом шага лопастей обеспечена возможность согласованного аэродинамического взаимодействия несущего винта с набегающим воздушным потоком в процессе складывания или раскрытия несущего винта в полете.
| DE 4401739 A1, 06.04.1995 | |||
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| WO 2017208037 A1, 07.12.2017 | |||
| US 20210362837 A1, 25.11.2021 | |||
| US 4407466 A1, 04.10.1983. | |||

