ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к транспортному машиностроению, а более конкретно к конвертопланам, имеющим подъемные роторы, подобно вертолетам поперечной схемы для вертикального взлета и посадки и для полета по самолетному после конвертации аппарата.
УРОВЕНЬ ТЕХНИКИ
Известен конвертоплан, названный самолетом вертикального взлета и посадки (СВВП) V-22 «Оспри», содержащий фюзеляж, крылья и стабилизатор с рулевыми поверхностями, установленные по самолетной схеме, снабженный гидравлическим приводом поворота роторов для конвертации и управления аппаратом [1].
Причины, препятствующие достижению нижеупомянутого технического результата при изготовлении и использовании известного конвертоплана, состоят в следующем:
а) общая масса конвертоплана (главным образом за счет тяжеловесных двигателей, синхронизирующего вала и угловых редукторов, гидравлического привода управления конвертации и управления автомата перекоса (АП)) велика;
б) неподвижное горизонтально расположенное крыло создает большое затеняющее сопротивление при обдуве его роторами в вертолетном режиме при вертикальном взлете и посадке.
Следствием этого являются следующие недостатки:
а) отсутствие возможности посадки конвертоплана на воду;
б) масса полезной нагрузки при вертикальном взлете и посадке составляет всего 25% от снаряженной массы;
в) наличие синхронизирующего вала и угловых редукторов усложняет и утяжеляет конструкцию, требует дополнительный отбор мощности силовых установок для функционирования, снижает надежность за счет усложнения конструкции;
г) гидравлические приводы конвертации и управления автоматами перекоса требуют дополнительного отбора мощности силовых установок, как следствие,
д) повышенный расход топлива в режиме взлета, посадки, всего полета.
Известен также экспериментальный конвертоплан, называемый самолетом вертикального взлета и посадки (СВВП) «ХС-142А» [2], содержащий фюзеляж с общим поворотным крылом (тилтвинг), а также четыре винтомоторные силовые установки, расположенные на крыле, в котором управление по крену осуществляется дифференциальным изменением мощности двигателей, по рысканью - отклонением элеронов, по тангажу - рулевым винтом малого диаметра, горизонтально установленным в хвостовой части. При этом крыло поворачивается в диапазоне 100 градусов от продольной оси СВВП.
Причины, препятствующие достижению нижеупомянутого технического результата при изготовлении и использовании известного конвертоплана, состоят в следующем:
а) двигатели оснащаются винтами малого диаметра;
б) для управления по тангажу применяется горизонтальный рулевой винт и вспомогательные механизмы;
в) мощность для привода рулевого винта и гидравлических приводов отбирается с силовых установок несущих винтов;
г) для поворота крыльев применяется гидравлический привод и вспомогательные механизмы.
Следствием этого являются следующие недостатки конвертоплана [2]:
а) значительная мощность силовых установок (двигателей), а следовательно, и вес двигателей, увеличение площади и прочности несущего крыла, а следовательно, увеличение его веса;
б) рулевой винт, гидравлический привод и вспомогательные механизмы усложняют конструкцию, уменьшают надежность конвертоплана, увеличивают его вес и уменьшают его энергоэффективность;
в) невозможен взлет и посадка с/на воду;
г) повышенный расход топлива в режиме висения и всего полета.
КРАТКОЕ РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение основано на возможности управления конвертопланом с роторами реактивного типа исключительно с помощью автомата перекоса вертолетного типа (АП), без каких-либо дополнительных устройств, таких как рули высоты, рули поворота, элероны, закрылки и прочие механизмы. В связи с этим существенным образом упрощается конструкция конвертоплана.
Становится возможным осуществлять маневры в вертолетном режиме исключительно за счет изменения вектора тяги роторов посредством автомата перекоса (АП). Управление по тангажу с помощью АП обеспечивается синхронным изменением циклического шага лопастей, по крену - дифференцированным изменением общего шага лопастей роторов. Педали используют для рысканья посредством обеспечения разнонаправленных векторов тяги роторов относительно центра тяжести конвертоплана исключительно в вертолетном режиме.
В самолетном режиме тяги педалей переключаются на штурвал, выполняя тем самым «элеронный» режим управления, с совмещенным управлением «рули высоты» по тангажу, как на самолетах, управление всем аппаратом в самолетном режиме осуществляется по принципу «джойстик». Шаг-газ в крейсерском режиме служит для увеличения или снижения скорости полета.
Особенно отчетливо достигнутые технические результаты проявляются в конкретном варианте осуществления, в котором:
консоли с роторами не имеют взаимосвязи друг с другом, свободно вращаются на шарнирах, могут фиксироваться в определенном положении с помощью фрикционных и аналогичных по достигаемому результату механизмов, не имеют моторов и гидравлических механизмов для принудительного изменения их положения; консоли управляемо устанавливаются по направлению вектора тяги роторов; хвостовое оперение не механизированное, обеспечивает направление движения по «самолетному» в пассивной стабилизации направления полета.
ПОДРОБНОЕ РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача изобретения состоит в создании легкого конвертоплана, обладающего следующей совокупностью технических характеристик:
а) радиус действия более 1000 км;
б) скорость в самолетном режиме не менее 500 км/час;
в) малонагруженные роторы с реактивным приводом;
г) возможность вертикального взлета и посадки с малых площадок и на неподготовленные для приземления горизонтальные поверхности, допускающие небольшой уклон;
д) возможность взлета и посадки на воду.
Вышеуказанная задача решена благодаря тому, что конвертоплан содержит в себе:
фюзеляж (1);
стабилизатор (3) и киль (4), выполненные с возможностью поддержания курсовой устойчивости в самолетном режиме и расположенные в хвостовой части фюзеляжа (1);
консоли (2), установленные вблизи центра тяжести (17) по обе стороны от фюзеляжа (1) и соединенные с ним посредством шарниров (18), обеспечивающих возможность изменения угла поворота в диапазоне от 100 до -10 градусов относительно горизонта независимо друг от друга;
обтекатели (19);
колонки (12) жестко соединены с консолями (2) и закрыты обтекателями (19);
роторы (6) содержат движители (5), имеющие лопасти (7) с реактивными двигателями (8), жестко соединенные с колонками (12) консолей (2) посредством торсионов (9), закрепленных на свободно вращающихся валах (10) колонок (12), в подшипниках (11);
реактивные двигатели (8), расположенные в консольной части лопастей (7), имеющие сопла, ориентированные в сторону задней кромки лопастей-движителей (7);
автоматы перекоса (14), выполненные с возможностью изменения общего и циклического шага лопастей-движителей (7) посредством изменения угла установки упомянутых лопастей-движителей (7);
средства управления (16), выполненные с возможностью изменения общего и циклического шага упомянутых лопастей (7) роторов (6).
Технический результат, достигаемый при изготовлении и использовании конвертоплана с вышеупомянутыми техническими характеристиками, складывается из совокупности следующих причинно-взаимосвязанных эффектов:
а) упрощена конструкция конвертоплана по сравнению с аналогом [2], а именно исключен вертикальный винт, стабилизатор с подвижными аэродинамическими плоскостями и/или активный киль с рулевыми плоскостями, не требуются гидравлические либо электрические системы для поворота крыльев при конвертации, не требуются шасси;
б) снижен общий вес конвертоплана;
в) повышена надежность по сравнению с конвертопланами [1] и [2];
г) повышена энергоэффективность в самолетном режиме, уменьшен расход топлива в режиме висения по сравнению с конвертопланами [1] и [2];
д) улучшено соотношение между массой полезной нагрузки и снаряженной массой;
е) имеется возможность взлета и посадки с/на воду и склоны до <20*;
ж) упрощен способ управления конвертопланом.
Общей причиной, благодаря которой стало возможным достижение вышеуказанного технического результата, является, в первую очередь, замена традиционных движителей, применявшихся в конвертопланах [1] и [2], реактивными движителями, и снабжение обоих роторов 2-канальными автоматами перекоса, в место 4-канальных вертолетного типа.
Исключение гидравлических либо иных механизмов конвертации стало возможным благодаря тому, что конвертация происходит под действием силы, аналогичной силе на вертолетном роторе, возникающей посредством автомата перекоса, который влияет на циклически изменяемый установочный угол лопастей. Эта сила является равнодействующей аэродинамической силой, влияющей на изменение положения роторов в пространстве; изменение силы тяги осуществляется изменением общего шага лопастей посредством автомата перекоса.
Возможность изменения циклического шага винтов в самолетном режиме позволяет варьировать положением конвертоплана в пространстве, в результате чего не требуются какие-либо дополнительные аэродинамические рулевые элементы крыльев, килей и стабилизаторов.
Надобность в рулевом винте и рулевых плоскостях отпадает благодаря тому, что установка различного циклического шага на левом и правом винтах в вертолетном режиме и различного общего шага винтов в самолетном режиме позволяет разворачивать летательный аппарат в любом направлении без использования каких-либо дополнительных средств.
Использование реактивных движителей вместо традиционных турбовинтовых позволяет уменьшить общую массу и габариты в сравнении с компоновкой, при которой силовые агрегаты расположены на концах консолей; применение электронной синхронизации вращения роторов посредством регулирования подачи топлива в каждый ротор отдельно с обратной взаимосвязью позволяет отказаться от синхронизирующего вала с угловыми редукторами. А в сравнении с компоновкой, при которой силовой агрегат размещен внутри фюзеляжа, тот же результат достигается благодаря отсутствию трансмиссии и кинематических связей между силовым агрегатом и роторами.
В соответствии с настоящим техническим решением силовая установка реактивного движителя выполнена в совокупности самого ротора или в виде самостоятельного агрегата.
В одном из предпочтительных вариантов выполнения роторов конвертоплана вышеупомянутые воздушно-реактивные движители (5) выполнены за одно целое с ротором (6) и вышеупомянутыми лопастями (7), при этом вышеупомянутые лопасти (7) содержат общее входное устройство (13), расположенное вблизи вала роторов (10), продольный воздуховод лопастей (7) с расположенным внутри него теплообменником (21) для испарения криогенного топлива и камеру сгорания двигателя (8) с реактивным соплом. Более подробно конструкция и принцип действия движителей данного типа раскрыты в патенте РФ на полезную модель №95035 [3].
В альтернативном варианте выполнения, конвертоплан дополнительно содержит в себе нагнетатель воздуха или газогенератор, при этом вышеупомянутые сопла двигателей (8) соединены с вышеупомянутой колонкой (12) в обтекателе (19) посредством воздуховодов, размещенных внутри вышеупомянутых движителей (5), а вышеупомянутая колонка роторов в обтекателе (19) сообщена с выходом упомянутого нагнетателя воздуха или газогенератора посредством воздуховода, обеспечивающего герметичность в местах шарнирных соединений. Данный тип привода лопастей аналогичен тому, который используют в вертолетах Sud-Ouest SO-1221 Djinn и Pegasus Pressure Jet Helicopter [4].
Герметичность в местах шарнирных соединений обеспечивается посредством лабиринтных уплотнений.
В качестве вышеупомянутого нагнетателя воздуха или газогенератора может применяться реактивный турбокомпрессор. Особенно предпочтительно, когда реактивное сопло турбокомпрессора снабжено отклоняющими элементами для управления вектором тяги хвостовой части фюзеляжа.
Предпочтительно, когда вышеупомянутый нагнетатель воздуха или газогенератор размещен внутри вышеупомянутого фюзеляжа (1). Однако не исключается возможность установки турбонагнетателя или компрессора внутри обтекателя, соединенного с фюзеляжем.
Лопасти винтов могут иметь различную конструкцию с особенностями, позволяющими повысить аэродинамическую эффективность (кручение лопасти, законцовки, стреловидные концы) или без таковых.
Вышеупомянутый киль (4) является пассивным, не имеет подвижных рулевых плоскостей. Разумеется, дополнение киля рулевыми элементами не исключается, однако насущная необходимость в этом отсутствует.
Вышеупомянутый стабилизатор (3) выполнен пассивным, то есть не имеет аэродинамических элементов с изменяемым углом атаки. Разумеется, дополнение стабилизатора указанными аэродинамическими элементами не исключается, однако насущная необходимость в этом отсутствует.
Конкретная схема выполнения стабилизатора или киля не имеет решающего значения, стабилизатор и/или киль могут быть выполнены в виде единого элемента, или же стабилизатор и/или киль могут состоять из двух отдельных элементов: правого и левого и верхнего и нижнего соответственно.
Для улучшения аэродинамической эффективности стабилизатор (3) может быть (не обязательно) снабжен законцовками (также называемыми килевыми шайбами).
В одном из особенно предпочтительных вариантов вышеупомянутые консоли (2) могут быть (не обязательно) выполнены в виде крыльев. Крылья могут иметь различный аэродинамический профиль, в частности, но не ограничиваясь, плоский, плоско-выпуклый или двояковыпуклый профиль. Стреловидность крыла может быть как прямая, так и обратная, однако предпочтительной является обратная стреловидность.
Упомянутые шарниры (18), посредством которых вышеупомянутые консоли (2) соединены с вышеупомянутым фюзеляжем (1), могут быть (не обязательно) снабжены средствами, обеспечивающими, в отсутствие существенной горизонтальной составляющей скорости полета, установку вышеупомянутых консолей (2) в нейтральном положении, соответствующем режиму взлета, посадки и/или висения.
В особенно предпочтительном варианте вышеупомянутые шарниры (18), оси или полуоси, на которых закреплены консоли и посредством которых упомянутые консоли (2) соединены с упомянутым фюзеляжем (1), снабжены фрикционными муфтами с электромагнитным управлением для фиксации в заданном положении. Наличие триммера-фиксатора позволяет снизить трудоемкость пилотирования после установки заданного направления курса, после выравнивания конвертоплана.
Вышеупомянутые шарниры (18), на которых установлены упомянутые консоли (2), могут быть (не обязательно) размещены выше центра тяжести конвертоплана. Такое расположение обеспечивает лучшую сбалансированность летательного аппарата по крену и тангажу, по сравнению с альтернативным расположением, когда консоли закреплены ниже центра тяжести.
Для уменьшения занимаемой площади, при хранении в ангаре или при парковке вышеупомянутые консоли (2) могут быть (но необязательно) выполнены съемными или складными.
Для управления конвертопланом могут применяться традиционные средства управления (16), включая, в частности, тяги и качалки, обеспечивающие связь вышеупомянутых автоматов перекоса (14) с органами управления (16), размещенными в кабине пилота, в частности с сервоприводами, подключенными к блоку управления, при этом блок управления выполнен с возможностью приема управляющих сигналов и передачи телеметрии по беспроводным каналам связи.
Альтернативно, вышеупомянутый фюзеляж (1) может быть (но не обязательно) выполнен заодно с кабиной пилота, при этом управление осуществляется непосредственно пилотом с помощью органов управления, размещенных внутри кабины. Средства управления могут включать в себя тяги и качалки, обеспечивающие связь вышеупомянутых автоматов перекоса (14) с органами управления (16). Органы управления (16) расположены в кабине пилота, могут представлять собой штурвал, шаг-газ и педали.
Поскольку посадка и взлет конвертоплана могут осуществляться при практически нулевой посадочной скорости (как вертикальной, так и горизонтальной), шасси не требуется, а вместо них упомянутый фюзеляж (1) может быть снабжен поплавками-опорами (20) для посадки (на воду или другие поверхности без уклона или с небольшим уклоном) или другими опорными элементами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
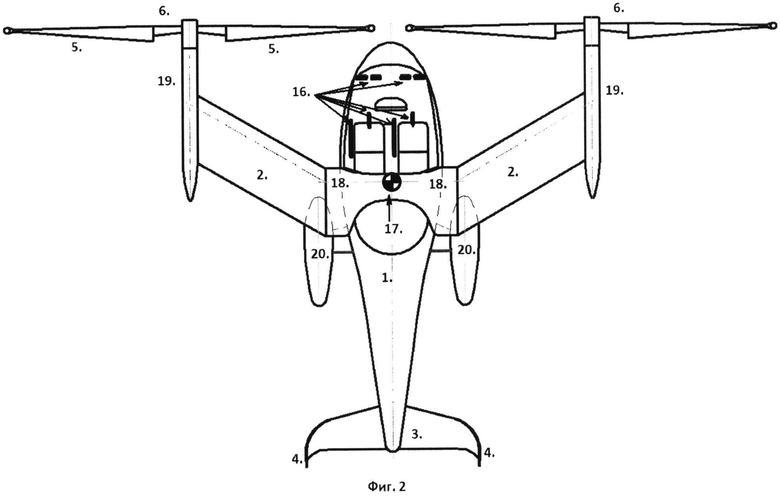
На фиг.1 схематически изображен вышеописанный конвертоплан вид сбоку.
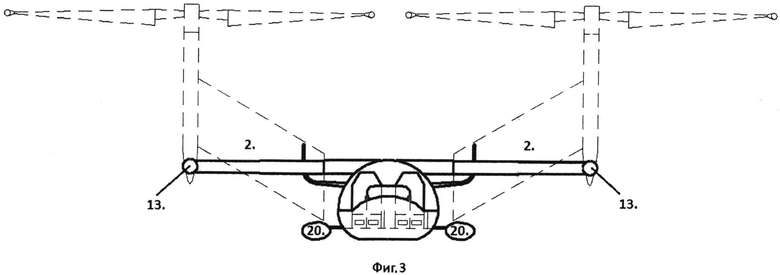
На фиг.2 схематически изображен вышеописанный конвертоплан вид сверху.
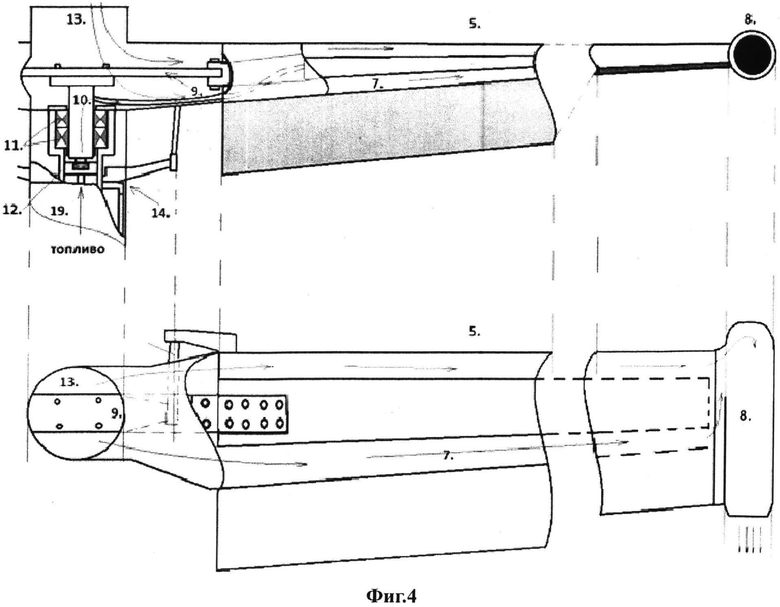
На фиг.3 схематически изображен вышеописанный конвертоплан вид спереди.
На фиг.4 показана принципиальная схема движителя с элементами автомата перекоса, торсиона, колонки ротора, возможность подачи топлива в движитель и движение воздуха в канальном нагнетателе.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 схематически показан конвертоплан вид сбоку, который содержит фюзеляж 1 с кабиной пилотов, с прикрепленными к нему вращающимися вокруг поперечной оси фюзеляжа консолями крыльев, на которых за одно целое укреплены реактивные движители; в крайней хвостовой части прикреплены пассивные стабилизатор и кили 4; в нижней средней части прикреплены опоры-поплавки 20; в кабине конвертоплана находятся органы управления; позади кабины, в заднем отсеке, могут находиться необходимые для запуска и эксплуатации: пусковая вспомогательная силовая установка (ВСУ), топливный бак (баллон), аккумулятор бортового питания, другие компоненты конструкции; на консолях 2 и внутри обтекателей 19 расположены колонки роторов, проходящие от фюзеляжа до консоли коммуникации топливоподачи, запальная цепь, пусковая воздушная магистраль, тяги управления со смесителями и промежуточными качалками управления и автоматы перекоса вертолетного типа (не показаны). Исполнение и размещение необходимого для запуска и эксплуатации оборудования конструктивно не принципиально, так как зависит от конструкторского решения задачи.
На фиг. 2 изображены: фюзеляж 1 с элементами конструкции, как то: кабина пилота и пассажира с продублированными органами управления конвертопланом 16, центр тяжести 17, хвостовая часть фюзеляжа со стабилизатором 3 и килями 4, центроплан с шарнирами 18 консолей 2, на которых укреплены обтекатели 19 с колонками роторов и закрепленными на них роторами 6, поплавками-опорами 20.
На фиг. 4 изображены обтекатели 19 с размещенными в них колонками 12 роторов с валом 10 и подшипниками 11, в состав колонок входят: сам корпус, на котором закреплены элементы передачи топлива с не вращающейся части во вращающуюся часть ротора через вал 10, соединенный с корпусом колонки посредством подшипников 11, автомат перекоса 14, также на валу ротора закреплен торсион 9, объединяющий собой лопасти 7 движителей 5 в ротор 6. В районе вала ротора расположено входное устройство движителей 13, которое строго ориентировано по оси полета в самолетном режиме. Показаны также сам движитель 5 с элементами воздушных каналов, теплообменным испарителем-лонжероном 21 и воздушно-реактивным двигателем 8. Также схематически показаны направление воздуха в канальном нагнетателе и принципиальная подача топлива в реактивный двигатель.
Конвертоплан содержит фюзеляж 1 с консольными крыльями 2, независимо и свободно вращающимися в поперечной оси в районе центра тяжести, в диапазоне от -10 до 110 градусов относительно продольной оси, а также два реактивных движителя 5 двух роторов 6, жестко закрепленных по оси, на каждой из поворотных консолей 2. В задней части фюзеляжа размещен пассивный стабилизатор 3 и киль 4, не имеющий рулевых плоскостей, выполняющий роль пассивного выдерживания курсовой устойчивости. Фюзеляж конвертоплана 1 в средней части имеет также два дополнительных поплавка-опоры 20, которые в сумме с фюзеляжем 1 служат посадочной поверхностью для приземления и взлета с любой горизонтальной поверхности вплоть до водной. Устройство управления конвертопланом содержит только автомат перекоса вертолетного типа 14, расположенный в непосредственной близости от движителей, в обтекателях 19 и объединенный в единую цепь управления, посредством тяг и качалок, со штурвалом, шаг-газом и педалями 16, расположенными в кабине пилота.
Консоли 2 выполнены съемными. Съемность консолей может быть обеспечена одним из широко известных быстроразъемных технических средств, например посредством базовых штырей с последующей замковой фиксацией или с помощью базовых стыков и крепежных винтов и т.п.
Взлет, полет и посадку конвертоплан осуществляет следующим образом.
Запускается пусковое вспомогательное силовое устройство (ВСУ), которое расположено в фюзеляже (1) и которое обеспечивает подачу необходимого объема и давления воздуха для запуска реактивных движителей (5), на которые подается одновременно топливо и высоковольтное напряжение на запальную свечу, консоли (2) с реактивными движителями (5) роторов (6) находятся в вертикальном положении. После запуска движителей и достижения ими рабочих оборотов роторов производится вертикальный взлет в вертолетном режиме с набором высоты для осуществления набора скорости в горизонтальном полете и переход в самолетный режим (конвертация). После набора скорости в самолетном режиме конвертоплан продолжает горизонтальный полет на заданной высоте с крейсерской скоростью. Посадка вертолета осуществляется в обратном порядке: гашение поступательной скорости до скоростей вертолетного режима, конвертация в режим вертолета, выбор посадочной площадки, посадка на опоры-поплавки 20, остановка роторов 6, прекращением подачи топлива в них.
Маневрирование конвертопланом на взлете, в полете и при посадке обеспечивается изменением положения консолей (2) с роторами (6) с помощью управления автоматов перекоса (14) из кабины пилота, органами управления 16: штурвал, шаг-газ, педали. Вследствие того, что вектор сил увлекает консоли занять положение, соответствующее ему в пространстве, за счет изменений вектора тянущей силы движителями-роторами посредством автомата перекоса вертолетного типа(14), управляемого органами управления (14) из кабины пилотов происходит управление самого конвертоплана в целом.
Движения штурвала, шаг-газа и педалей проходят через 2 смесителя и работают следующим образом:
1) штурвал «от себя - на себя» в вертолетном и самолетном режиме изменяет тангаж конвертоплана, воздействуя на роторы синхронным ходом обоих автоматов перекоса. Обеспечивает конвертацию с вертолетного в самолетный режим и обратно;
2) движение штурвала «влево-вправо» в вертолетном режиме изменяет крен, воздействуя дифференциально на общий шаг обоих роторов. В самолетном режиме работает в функции «элероны», функция появляется при конвертации переключением тяг автоматически с педалей на штурвал;
3) педали работают только при режиме вертолета в режиме «рыскания» и оказывают воздействие на автомат перекоса дифференциально;
4) рычаг шаг-газа влияет на синхронный общий шаг и общую корректировку подачи топлива автоматически в роторы-движители. Служит для взлета в вертолетном режиме и маневрирования вертикально, в самолетном режиме - для увеличения или уменьшения поступательной скорости.
Стабилизация полета по курсу в самолетном режиме осуществляется стабилизатором (3) и килем (4) по принципу подобно оперению стрелы.
Ниже приводятся основные летные данные предлагаемого конвертоплана, полученные в процессе рабочего проектирования.
СПИСОК ЛИТЕРАТУРЫ
1. Конвертоплан V-22 «Оспри» // http://ru.wikipedia.org/wiki/Bell_V-22_Osprey.
2. Конвертоплан «ХС-142А» // Ружицкий Е.И. Американские самолеты вертикального взлета. М.: ACT: Астрель, 2000.
3. Патент РФ на полезную модель №95035.
4. Опубликованная заявка США № US 2013161444.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2018 |
|
RU2705743C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1997 |
|
RU2132289C1 |
| МНОГОЦЕЛЕВОЙ ГИДРОКОНВЕРТОВИНТОПЛАН | 2007 |
|
RU2351506C2 |
| КОНВЕРТИРУЕМЫЙ ДОЗВУКОВОЙ САМОЛЕТ | 2024 |
|
RU2839782C1 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456208C1 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2009 |
|
RU2397919C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Конвертоплан содержит фюзеляж, стабилизатор, киль, расположенные в хвостовой части фюзеляжа, консоли, установленные вблизи центра тяжести по обе стороны от фюзеляжа, обтекатели, колонки, роторы с лопастями, автоматы перекоса, средства управления автоматами перекоса. Консоли соединены с фюзеляжем посредством шарниров, обеспечивающих возможность изменения угла поворота в диапазоне от 100 до -10 градусов относительно горизонта независимо друг от друга. Колонки жестко соединены с консолями и закрыты обтекателями. Роторы содержат лопасти с реактивными двигателями, соединенные с колонками посредством торсионов, закрепленных на свободно вращающихся валах колонок в подшипниках. Реактивные двигатели расположены в консольной части лопастей и имеют сопла, ориентированные в сторону задней кромки лопастей. Достигается возможность управления конвертопланом исключительно посредством автоматов перекоса. 21 з.п. ф-лы, 4 ил., 1 табл.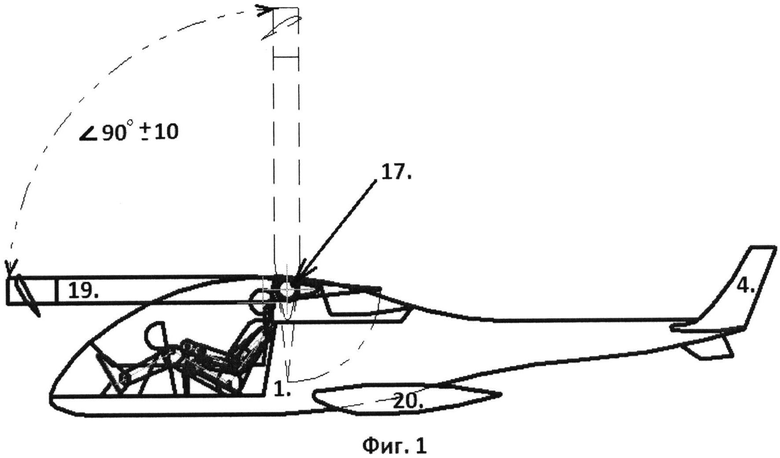
1. Конвертоплан, содержащий в себе:
фюзеляж (1);
стабилизатор (3) и киль (4), выполненные с возможностью поддержания курсовой устойчивости в самолетном режиме и расположенные в хвостовой части фюзеляжа (1);
консоли (2), установленные вблизи центра тяжести (17) по обе стороны от фюзеляжа (1) и соединенные с ним посредством шарниров (18), обеспечивающих возможность изменения угла поворота в диапазоне от 100 до -10 градусов относительно горизонта независимо друг от друга;
обтекатели (19);
колонки (12) жестко соединены с консолями (2) и закрыты обтекателями (19);
роторы (6) содержат лопасти (7) с реактивными двигателями (8), соединенные с колонками (12) консолей (2) посредством торсионов (9), закрепленных на свободно вращающихся валах (10) колонок (12), в подшипниках (11);
реактивные двигатели (8), расположенные в консольной части лопастей (7), имеющие сопла, ориентированные в сторону задней кромки лопастей (7);
автоматы перекоса (14), выполненные с возможностью изменения общего и циклического шага лопастей (7) посредством изменения угла установки упомянутых лопастей (7);
средства управления (16), выполненные с возможностью изменения общего и циклического шага упомянутых лопастей (7) роторов (6).
2. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые лопасти (7) содержат общее входное устройство (13), расположенное вблизи вала роторов (10), продольный воздуховод лопастей (7) с расположенным внутри него теплообменником (21) для испарения криогенного топлива и камеру сгорания двигателя (8) с реактивным соплом.
3. Конвертоплан по п. 1, характеризующийся тем, что он дополнительно содержит в себе нагнетатель воздуха или газогенератор, при этом вышеупомянутые сопла двигателей (8) соединены с вышеупомянутой колонкой (12) в обтекателе (19) посредством воздуховодов, размещенных внутри вышеупомянутых лопастей (7), а вышеупомянутая колонка роторов в обтекателе (19) сообщена с выходом упомянутого нагнетателя воздуха или газогенератора посредством воздуховода, обеспечивающего герметичность в местах шарнирных соединений.
4. Конвертоплан по п. 1, характеризующийся тем, что в нем герметичность в местах шарнирных соединений обеспечивается посредством лабиринтных уплотнений.
5. Конвертоплан по п. 3, характеризующийся тем, что в нем вышеупомянутый нагнетатель воздуха или газогенератор представляет собой реактивный турбокомпрессор, а его реактивное сопло снабжено отклоняющими элементами для управления вектором тяги.
6. Конвертоплан по любому из пп. 3 или 5, характеризующийся тем, что в нем вышеупомянутые нагнетатель воздуха или газогенератор размещены внутри вышеупомянутого фюзеляжа (1).
7. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутый киль (4) является пассивным, не имеет подвижных рулевых плоскостей.
8. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутый стабилизатор (3) является пассивным.
9. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутый стабилизатор (3) представляет собой единый элемент.
10. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутый стабилизатор (3) снабжен законцовками - килями (4) (килевыми шайбами).
11. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые консоли (2) выполнены в виде крыльев.
12. Конвертоплан по п. 11, характеризующийся тем, что в нем вышеупомянутые крылья выполнены с плоским, плоско-выпуклым или двояковыпуклым аэродинамическим профилем.
13. Конвертоплан по п. 11, характеризующийся тем, что в нем вышеупомянутые крылья выполнены с обратной стреловидностью.
14. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые шарниры (18), посредством которых вышеупомянутые консоли (2) соединены с вышеупомянутым фюзеляжем (1), снабжены средствами, обеспечивающими, в отсутствие существенной горизонтальной составляющей скорости полета, установку вышеупомянутых консолей (2) в нейтральном положении, соответствующем режиму взлета, посадки и/или висения.
15. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые шарниры (18), посредством которых вышеупомянутые консоли (2) соединены с вышеупомянутым фюзеляжем (1), снабжены фрикционными муфтами с электромагнитным управлением для фиксации в заданном положении.
16. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые шарниры (18), на которых установлены вышеупомянутые консоли (2), размещены выше центра тяжести.
17. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые консоли (2) выполнены съемными или складными для компактной парковки.
18. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые средства управления включают в себя тяги и качалки, обеспечивающие связь вышеупомянутых автоматов перекоса (14) с органами управления (16) в кабине пилота.
19. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутый фюзеляж (1) выполнен заодно с кабиной пилота.
20. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутые средства управления включают в себя тяги и качалки, обеспечивающие связь вышеупомянутых автоматов перекоса (14) с органами управления (16).
21. Конвертоплан по п. 20, характеризующийся тем, что в нем упомянутые органы управления (16) расположены в кабине пилота и представляют собой штурвал, шаг-газ и педали.
22. Конвертоплан по п. 1, характеризующийся тем, что в нем вышеупомянутый фюзеляж (1) снабжен поплавками-опорами (20).
| US 2011036955 A1, 29.10.2009 | |||
| ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2005 |
|
RU2310583C2 |
| АЭРОМОБИЛЬ | 2000 |
|
RU2211155C2 |
| US 2011315806 A1, 29.12.2011 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1997 |
|
RU2132289C1 |

