Изобретение относится к спутниковой сети связи, а именно к выбору маршрута передачи информации, основанному на географических координатах или местоположении.
Для обеспечения информационного обмена в режиме реального времени с любыми космическими аппаратами (КА), находящимися вне зон радиовидимости (ЗРВ) земных станций приема-передачи информации (ЗС), расположенных на территории России, и выведенных на однотипные круговые квазиполярные и полярные орбиты без применения дополнительной группировки спутников-ретрансляторов (CP) предлагается создание цифровой сети передачи данных на основе сети спутниковой связи (ССС), состоящей из КА, представляющих собой CP и связанных между собой межспутниковыми линиями связи (МЛС) как в одной орбитальной плоскости (ОП), так и с соседними ОП. Такая сеть будет представлять собой спутниковый Internet (SatWAN). Примерами таких орбитальных группировок (ОГ), состоящих из КА, выведенных на однотипные круговые орбиты могут служить низкоорбитальные и среднеорбитальные группировки спутниковой связи, которые могут служить в качестве резерва и дополнения наземной сети Internet, а также - ОГ дистанционного зондирования Земли, ОГ спутниковой навигации и другие космические системы различного назначения.
Примером такой ОГ, где все КА связаны между собой межспутниковыми линиями связи, может служить действующая в настоящее время ССС Iridium, а также ССС, описанные в следующих патентах:
- патент на изобретение РФ №2754947 опубл. 08.09.2021 г. (авторы Пантелеймонов И.Н., Потюпкин А.Ю., Горожанкин Л.В., Барденков В.В., Березкин В.В., Пантелеймонов И.И., Аджибеков А.А., Пантелеймонова А.В., Мырова Л.О.; Щербатых Л.В., Боцва В.В., Тодуркин В.В., Ковалев В.И., Филатов В.В., Пантелеймонов Т.И., Гончарук А.И.) в котором раскрыта Система персональной подвижной спутниковой связи на основе сети низкоорбитальных спутников-ретрансляторов, обеспечивающая предоставление доступа в сеть Internet с носимого персонального абонентского терминала;
- патент на изобретение РФ №2752753 опубл. 02.08.2021 (авторы Пантелеймонов И.Н., Горожанкин Л.В., Пантелеймонов И.И., Монастыренко А.А., Пантелеймонова А.В., Гончарук А.И., Пантелеймонов Т.И, Боцва В.В., Филатов В.В., Белозерцев А.В., Крючкова М.С.), в котором описаны способ организации связи с объектами, расположенными на орбите и поверхности планеты или спутника планеты и система дальней космической связи для осуществления данного способа;
- патент на изобретение РФ №2690966 опубл. 07.06.2019 (автор Пантелеймонов И.Н.), в котором раскрыта спутниковая система, управляемая по межспутниковой радиолинии;
- патент на изобретение РФ №2713293 опубл. 16.05.2019 (авторы Потюпкин А.Ю., Пантелеймонов И.Н., Саушкин A.M., Моисеев М.В., Рогов А.Е., Аджибеков А.А., Благодырев В.А., Березкин В.В., Жодзишский А.И., Селиванов А.С., Панцырный О.А., Кисляков М.Ю., Останний А.И., Траньков В.М., Самаров А.В., Алпеев В.А., Петрова A.M., Крючкова М.С.), в котором раскрыта система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи;
- патент на полезную модель РФ №47600 опубл. 24.03.2005 г. (авторы: Урличич Ю.М., Гришмановский В.А., Селиванов А.С., Степанов А.А.), в котором раскрыта космическая система глобальной служебной спутниковой связи и в ряде других.
Известно, что трафик реального времени является критичным к задержкам и поэтому основным критерием выбора маршрута является кратчайший путь от отправителя к получателю информации. Примером такого трафика может служить ретрансляция информации управления полетом КА, авиационной техники, беспилотных летательных аппаратов (БПЛА) и другими высокоскоростными техническими объектами, а также критичными к задержкам информации является телефония и видеоконференцсвязь.
Из области техники известны способы маршрутизации, которые при построении кратчайшего пути рассчитывают в условных единицах длины всех возможных вариантов маршрутов, а затем выбирают кратчайший из них.
Кроме того, известно, что маршрутизаторы наземных компьютерных сетей применяют эвристические механизмы оценки длины пути, т.е. вычисленный таким образом путь может в действительности не являться самым коротким. К примеру, протокол маршрутизации Routing Information Protocol (RIP) оценивает длину пути по количеству узлов ретрансляции («хопов»), в роли которых выступают маршрутизаторы. При этом количество маршрутизаторов на пути от источника к получателю может быть не связано с реальными расстояниями, следствием которых являются задержки в линиях связи. Особенностью спутниковых линий связи в сетях спутниковой связи на негеостационарных космических аппаратах (НГКА) являются большие расстояния между узлами ретрансляции, постоянно изменяющиеся с высокими скоростями, обусловленными высокими скоростями орбитального движения.
Применение способов маршрутизации, использующихся в наземных компьютерных сетях, для решения задач построения маршрута в МЛС не является эффективным, т.к. не учитывает то, что КА, находятся в постоянном орбитальном движении и не учитывает то, что совокупности орбит КА описывают в околоземном пространстве сферу.
Техническим результатом предлагаемого способа маршрутизации является:
- повышение точности расчетов кратчайшего пути маршрутизации в предлагаемой двухмерной сферической системе координат, служащей для определения текущего местоположения КА;
- повышение быстродействия работы бортовых маршрутизаторов;
- снижение вычислительной нагрузки на бортовой маршрутизатор. Достижение технического результата осуществляется за счет:
- вычисления бортовым маршрутизатором (БМ) реального расстояния между КА в двухмерной сферической системе координат;
- задания бортовым маршрутизатором приоритетных направлений по широте и долготе с учетом того, что абсолютная линейная длина пути, равная одному градусу широты на поверхности сферы уменьшается по мере удаления от экватора.
Предлагаемый способ маршрутизации потоков информации критичной к задержкам в МЛС в полносвязанной ССС на НГКА, расположенных на однородных круговых орбитах с одинаковой высотой круговой орбиты, отличается от известных тем, что обеспечивает:
- простоту и точность расчетов БМ кратчайшего пути между бортовыми маршрутизаторами на основании координат КА в двухмерной сферической системе координат;
- учет специфики двухмерной сферической системы координат при построении маршрута бортовым маршрутизатором;
- учет специфики построения полносвязанной ССС на НГКА с МЛС при построении маршрута бортовым маршрутизатором.
Заявленное изобретение проиллюстрировано следующими фигурами:
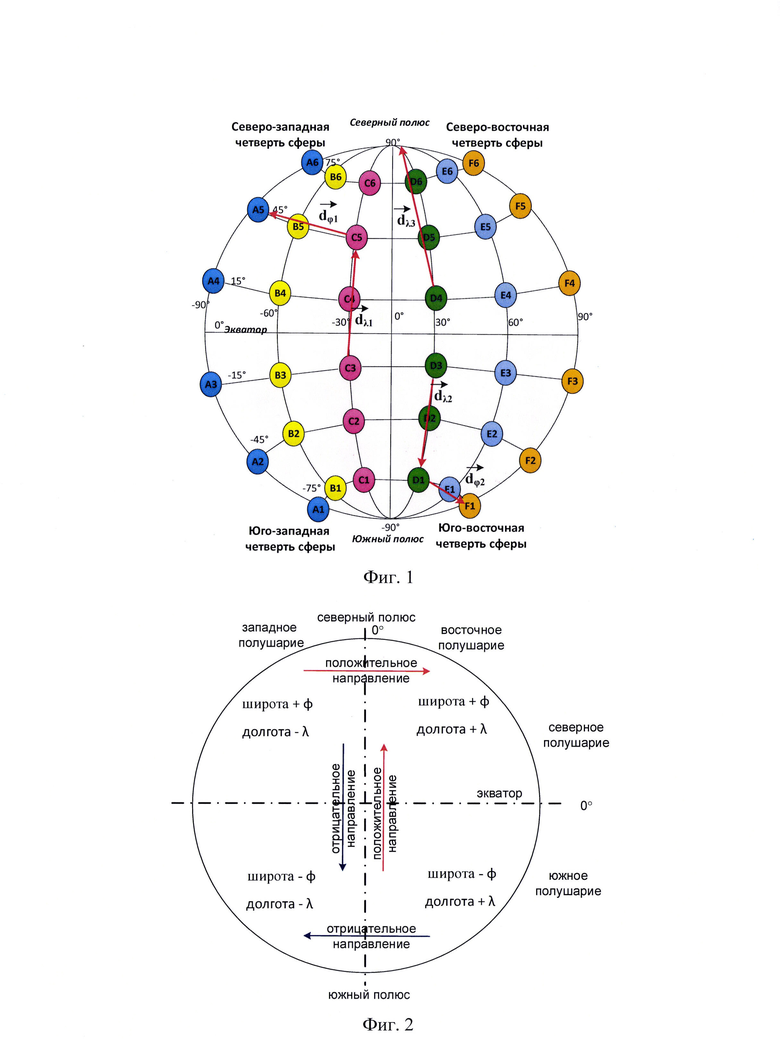
Фиг. 1 - Топологическая схема полносвязанной ССС на НГКА;
Фиг. 2 - Порядок определения знака координаты КА в разных плоскостях и направлениях движения;
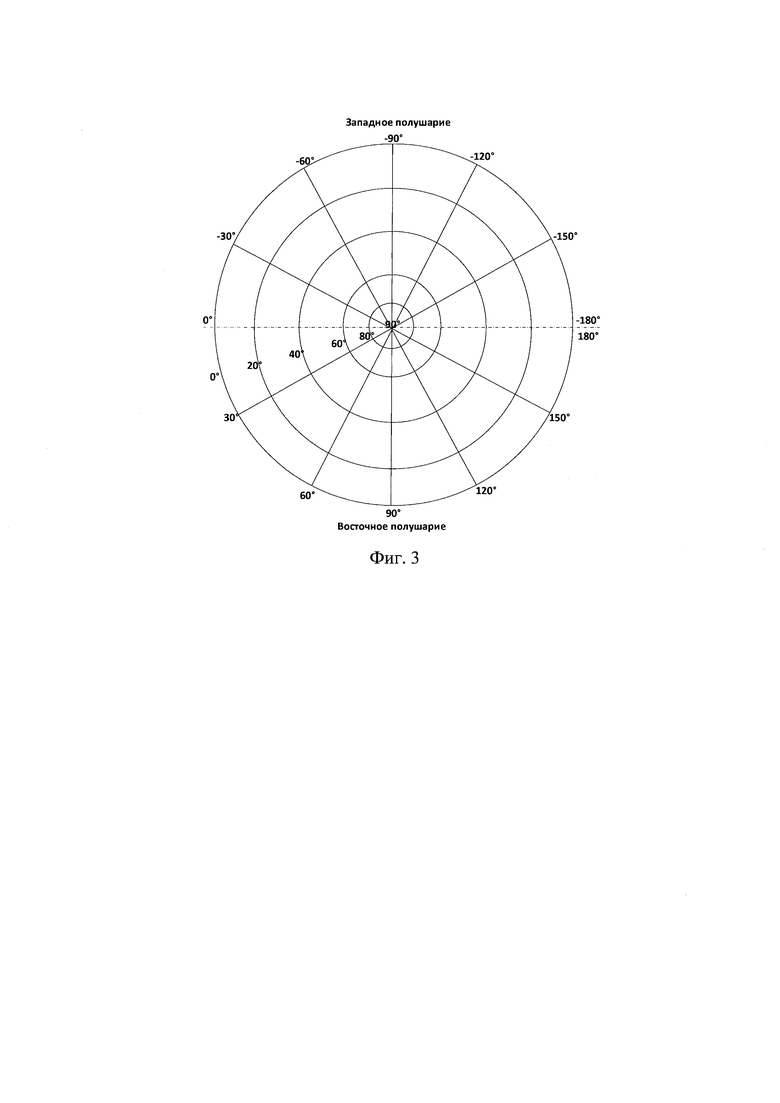
Фиг. 3 - Значения координат КА по долготе на экваторе (вид со стороны северного полюса);
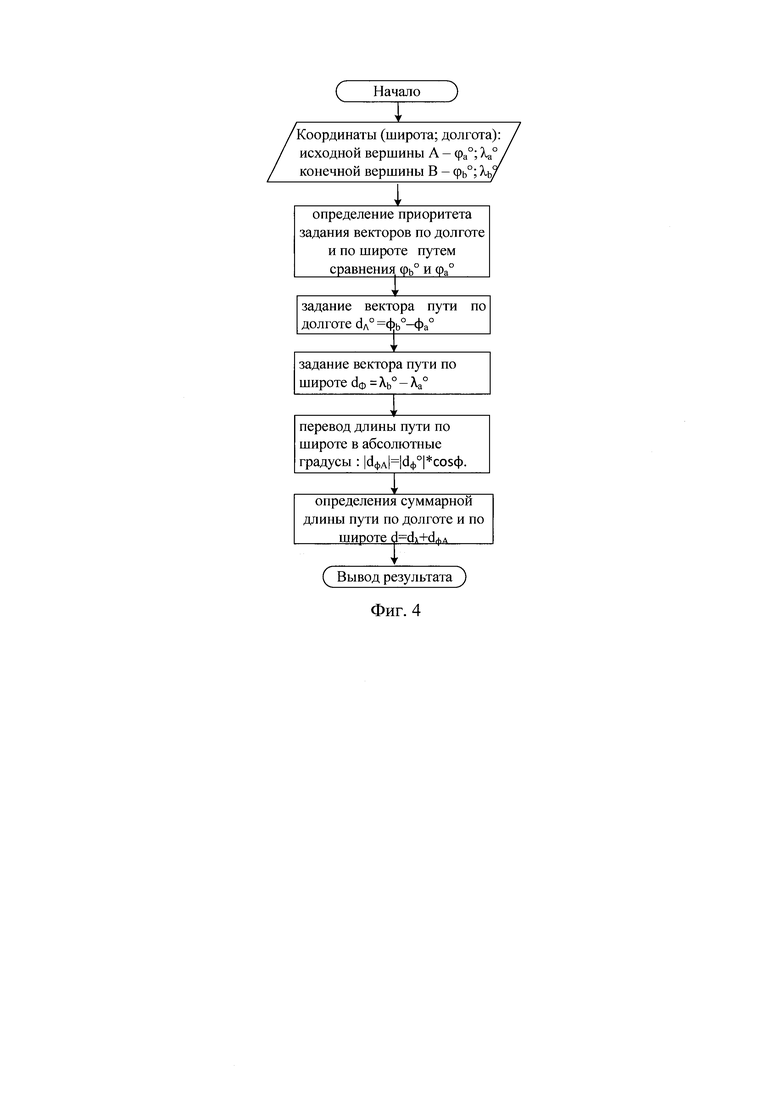
Фиг.4 - Алгоритм работы бортового маршрутизатора КА по определению кратчайшего пути относительно поверхности Земного шара в двухмерной сферической системе координат;
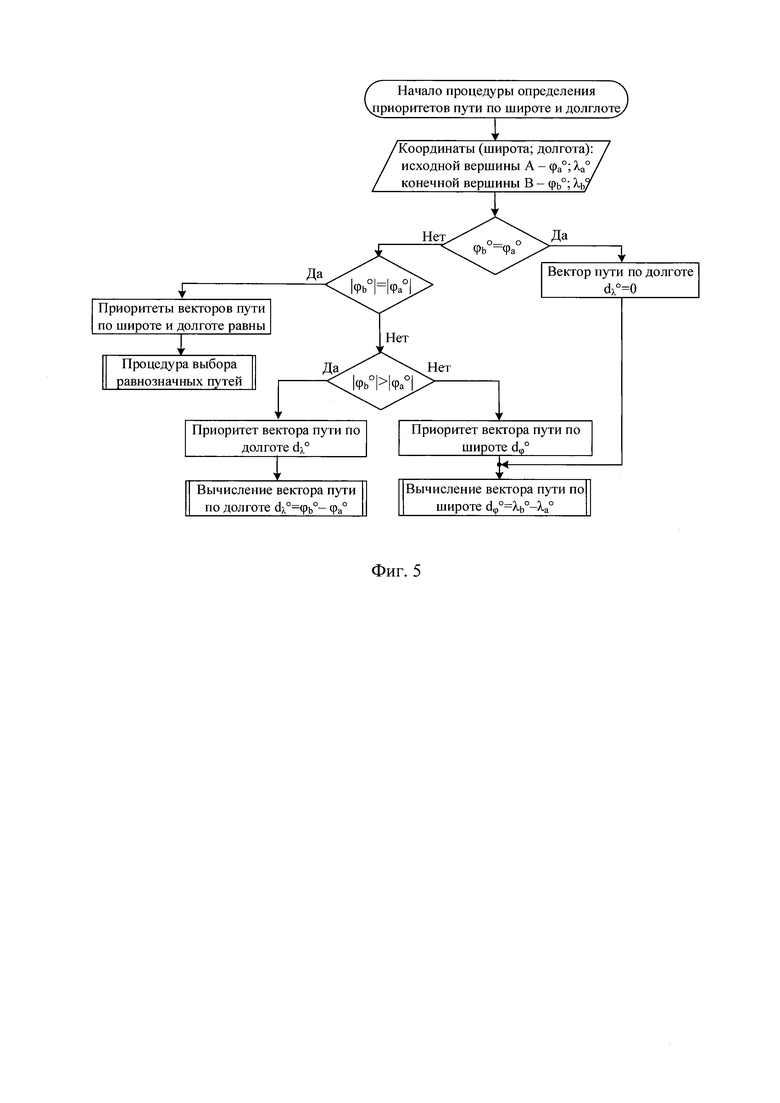
Фиг. 5 - Алгоритм выполнения бортовым маршрутизатором КА процедуры определения приоритета задания векторов по долготе и по широте;
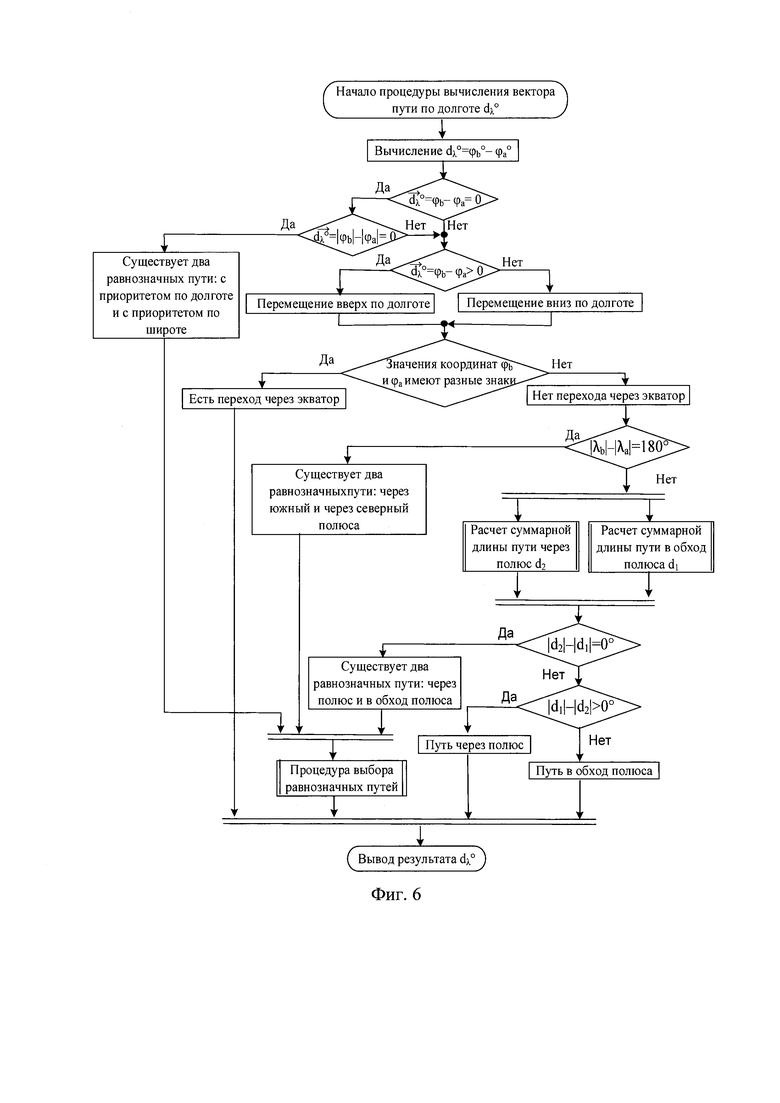
Фиг. 6 - Алгоритм выполнения бортовым маршрутизатором КА процедуры задания вектора пути по долготе;
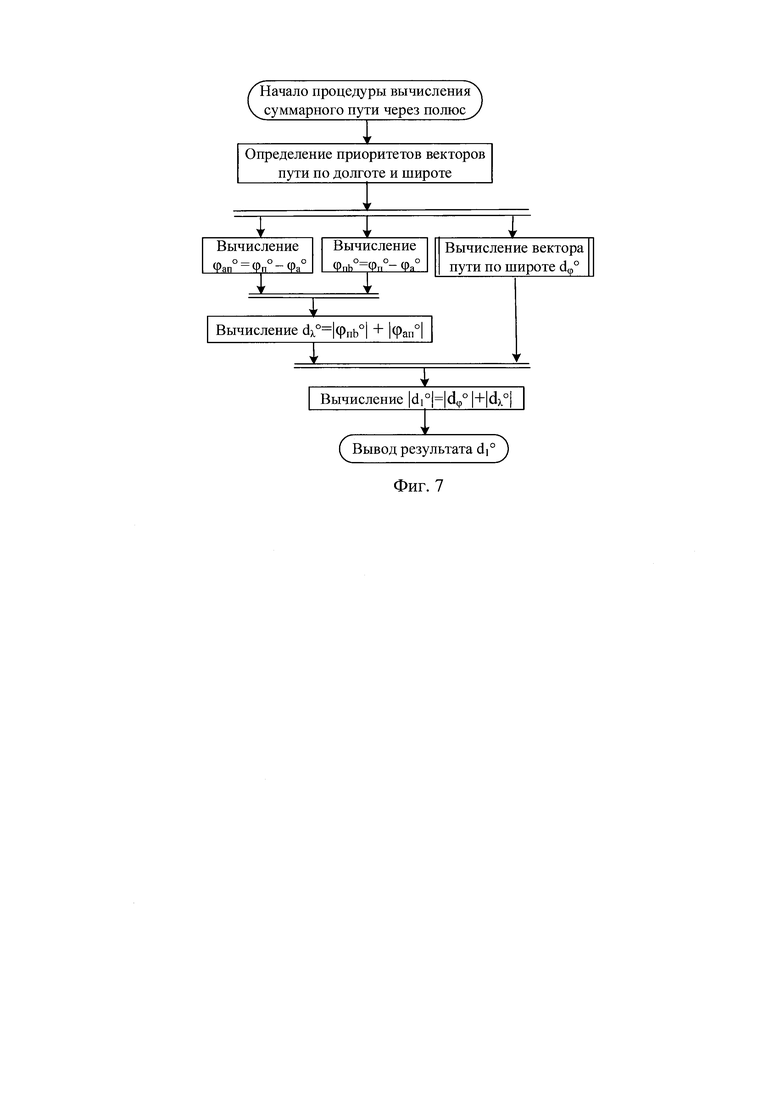
Фиг. 7 - Алгоритм процедуры вычисления бортовым маршрутизатором КА суммарного пути через полюс;
Фиг. 8 - Алгоритм выполнения бортовым маршрутизатором КА процедуры задания вектора пути по широте;
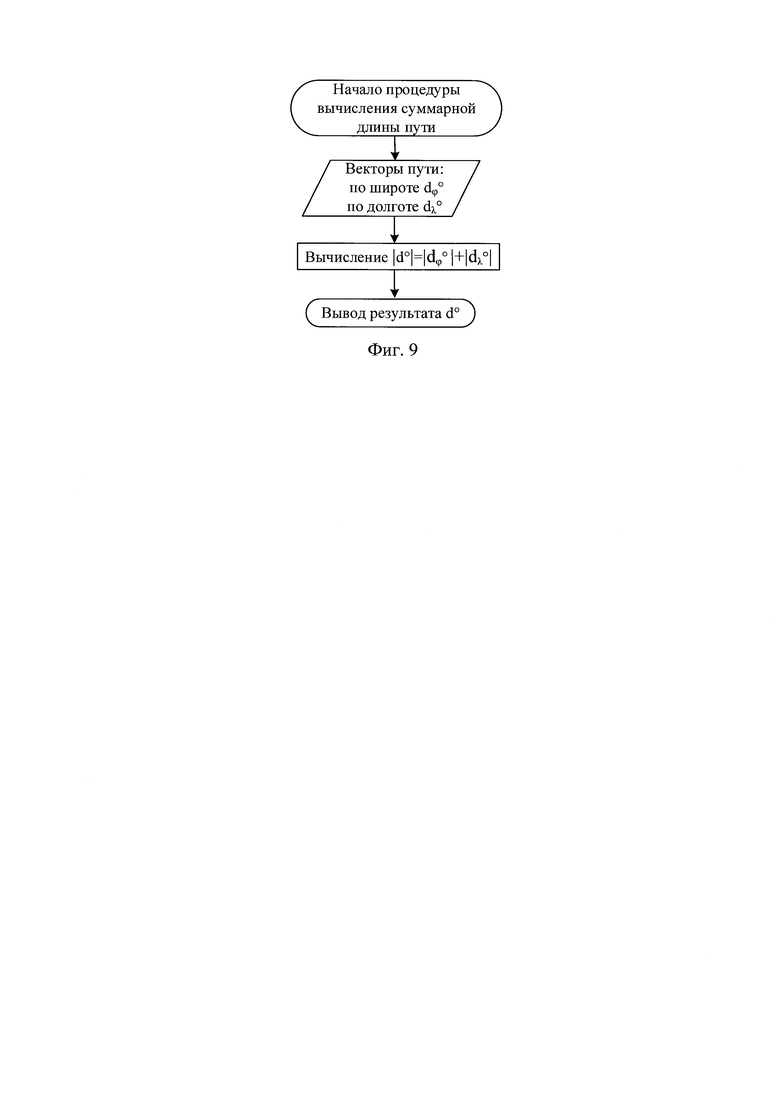
Фиг. 9 - Алгоритм выполнения бортовым маршрутизатором КА процедуры определения суммарной длины пути по долготе и по широте dab.
Способ маршрутизации потоков информации критичной к задержкам в МЛС в полносвязанной ССС на НГКА, расположенных на однородных круговых орбитах с одинаковой высотой круговой орбиты, заключается в следующем.
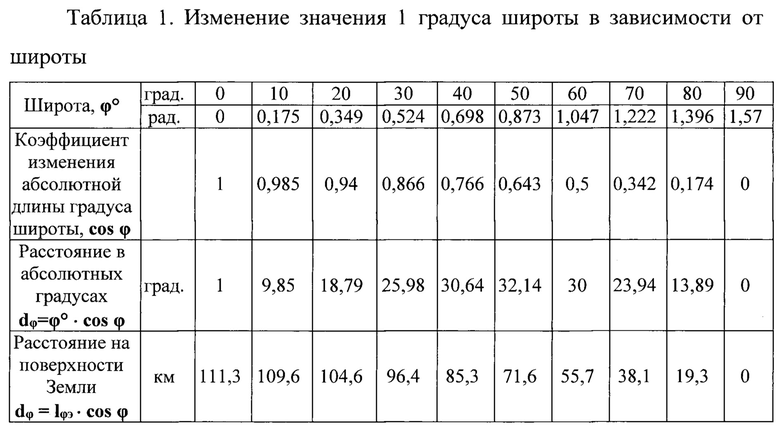
Известно, что абсолютная линейная длина пути, равная одному градусу широты на поверхности сферы, уменьшается по мере удаления от экватора. Изменение значения одного градуса широты в зависимости от широты приведено в таблице 1.
Применяемые в других способах маршрутизации алгоритмы определения кратчайшего пути не учитывают этой особенности. Предлагаемый способ маршрутизации определяет реальный, а не условный кратчайший путь между КА на поверхности сферы, описанной круговыми орбитами этих КА и по сравнению с имеющимися способами маршрутизации, обладает простотой, обусловленной меньшим количеством вычислений.
Это достигается за счет:
1) знания текущих координат КА в предлагаемой двухмерной сферической системе координат и хранения их в базах данных (БД) баллистической информации бортовых навигационных систем (БНС) на каждом КА;
2) расчета углового расстояния между КА в предлагаемой двухмерной сферической системе координат бортовым маршрутизатором;
3) учета изменения длины пути от КА к КА, эквивалентной градусу широты на поверхности сферы при удалении от экватора и приближении к полюсам при проведении расчета длины пути бортовым маршрутизатором.
Принцип работы БМ КА в МЛС ССС на НГКА заключается в том, что они вычисляют реальные кратчайшие пути передачи информации от КА - источника к КА - получателю с учетом координат этих КА, орбитального построения и существующих МЛС.
Находясь в орбитальном полете КА, по принимаемым навигационным сигналам от спутниковой навигационной системы (СНС) ГЛОНАСС, постоянно определяют свои координаты, БНС КА рассчитывают прогноз орбитального движения на определенные периоды (например, на 1 сутки или на 1 неделю), продолжительность которых определяется требуемой точностью позиционирования. Затем, периодически в установленное время происходит обмен между КА по МЛС прогнозами орбитального движения, которые записываются в базы данных (БД) баллистической информации в БНС КА. Бортовой маршрутизатор КА при построении маршрута делает запрос в БД баллистической информации собственной БНС с целью определения собственных координат и координат КА-получателя. Примером такого бортового маршрутизатора КА может служить бортовой маршрутизатор КА, описанный в патенте на изобретение РФ 2714220 от 19.08.2019 (автор Пантелеймонов И.Н.), в котором раскрыта функциональная схема и алгоритм работы бортового маршрутизатора CP с интегрированными службами.
Координаты КА задаются в сферической системе координат, т.к. каждый КА движется по круговой орбите, совокупность которых описывает в околоземном пространстве сферу и связан с четырьмя соседними КА посредством МЛС, тем самым образуя полносвязанную сеть. Таким образом, КА расположены на поверхности сферы и соединены МЛС, представляющие собой прямые линии или другими словами - хорды окружности орбит. Пример топологической схемы полносвязанной ССС на НГКА изображен на фигуре 1. Стрелками на фигуре 1 обозначены примеры кратчайших путей между КА по долготе и широте.
На поверхности сферы, описанной орбитами КА, в предложенной двухмерной сферической системы координат координаты КА задаются широтой ϕ и долготой λ, единицей измерения которых являются градусы, записываемые в форме десятичного числа, при этом угловые минуты и угловые секунды пересчитываются в десятичные дроби. Причем, в отличие от трехмерной сферической системе координат, не учитывается параметр радиус r, т.к. все КА в рассматриваемой ОГ имеют одинаковую высоту орбиты.
Принцип задания координат КА в БНС заключается в следующем.
По аналогии с координатами на поверхности Земного шара сфера, описываемая орбитами КА разделяется на следующие полушария:
- по долготе - на западное и восточное;
- по широте - на южное и северное.
Координаты КА по долготе измеряются в градусах и имеют значения от 0° до 180°. Координаты КА по широте также измеряются в градусах и имеют значения от 0° до 90°, таким образом, в экваториальной плоскости значение координаты по широте равно 0°, на полюсах значение координаты по широте равно 90°.
Задание знаков значений координат КА в четвертях сферы осуществляется следующим образом:
1) северо-восточная четверть сферы - координаты КА по долготе и широте имеют положительные значения;
2) северо-западная четверть сферы - координаты КА по долготе имеют отрицательные значения, а координаты по широте имеют положительные значения;
3) юго-восточная четверть сферы - координаты КА по долготе имеют положительные значения, а координаты по широте имеют отрицательные значения;
4) юго-западная четверть сферы - координаты КА по долготе и координаты по широте имеют отрицательные значения;
Исходя из знания координат КА - отправителя и КА - получателя бортовые маршрутизаторы задают направления передачи потоков информации, условно называемые векторами. Задание знаков этих векторов осуществляется следующим образом:
- положительным направлением передачи информации в МЛС между КА по долготе считается движение слева направо на фигуре 2 и против часовой стрелки на фигуре 3.
- положительным направлением передачи информации в МЛС между КА по широте считается движение снизу вверх (из южного полушария в северное).
Предлагаемый способ маршрутизации применяет методику, в которой измеряется угловое расстояние, и единицей измерения расстояний являются градусы, также записываемые в форме десятичного числа.
Это обусловлено тем, что линейное значение расстояния в километрах эквивалентное 1 градусу широты на разных широтах разное, т.к. уменьшается по мере приближения к полюсам (роста значения широты).
В предлагаемом способе маршрутизации для проведения расчетов длины пути используется следующие особенности. В двухмерной сферической системе координат (в отличие от поверхности Земного шара, представляющего собой геоид) расстояние в километрах эквивалентное одному градусу lэ по широте dϕ на экваторе и по долготе dλ равны и приняты за единицу расчета расстояний под названием «абсолютное значение расстояния в градусах» или «абсолютный градус».
Зависимость изменения длины пути эквивалентной градусу широты на поверхности Земного шара в зависимости от роста значения широты отображена в таблице 1.
Таким образом, бортовой маршрутизатор КА, применяющий предлагаемый способ маршрутизации, для подсчета суммарной длины пути по широте и долготе, расстояние в МЛС между КА, измеренное по широте в градусах, переводит в абсолютные градусы в зависимости от высоты широты с учетом коэффициента изменения абсолютной длины градуса широты, равного cosϕ.
Алгоритм работы бортового маршрутизатора КА по определению кратчайшего пути между КА-отправителем и КА-получателем информации в МЛС на поверхности сферы, описанной орбитами КА, в двухмерной сферической системе координат осуществляется следующим образом. С целью обеспечения простоты описания принципов работы бортовых маршрутизаторов КА, рассмотрим их действия на примерах.
Бортовой маршрутизатор КА перед построением маршрута получает из БД баллистической информации значения координат КА - отправителя обозначим его А (ϕа; λа) и значения координат КА - получателя обозначим его В (ϕb; λb), где: ϕ - широта (градус); λ - долгота (градус).
Алгоритм работы бортового маршрутизатора КА по определению кратчайшего пути между А и В на поверхности сферы в двухмерной сферической системе координат на основании состоит из четырех действий:
1) определение приоритета задания векторов по долготе и по широте;
2) задание вектора пути по долготе 
3) задание вектора пути по широте  перевод значения углового расстояния по широте в абсолютные градусы;
перевод значения углового расстояния по широте в абсолютные градусы;
4) определения суммарной длины пути по долготе и по широте dab.
В зависимости от выбранного приоритета задание бортовым маршрутизатором векторов по долготе и по широте очередность выполнения второго и третьего действий может меняться между собой. При появлении нескольких маршрутов расчеты второго и третьего действия взаимосвязаны между собой и осуществляются параллельно.
Процедура определения вектора пути бортовым маршрутизатором как по долготе, так и по широте заключается в определении направления вектора и затем расчета его скалярного значения.
Алгоритм работы бортового маршрутизатора CP по определению кратчайшего пути относительно поверхности Земного шара в двухмерной сферической системе координат изображен на фигуре 4.
1-ое действие. В связи с тем, что в более высоких широтах длина пути, выраженная в градусах, по широте в километрах короче, чем в низких, вначале бортовым маршрутизатором определяется приоритет задания векторов по долготе и по широте:
1) если значение координаты широты конечной вершины  равно значению координаты широты исходной вершины
равно значению координаты широты исходной вершины  то путь по долготе
то путь по долготе  равен нулю:
равен нулю: 
2) если модуль координаты широты конечной вершины  больше модуля координаты широты исходной вершины
больше модуля координаты широты исходной вершины  то вначале прокладывается путь по долготе
то вначале прокладывается путь по долготе 
3) если модуль координаты широты конечной вершины  меньше модуля координаты широты исходной вершины
меньше модуля координаты широты исходной вершины  то сперва прокладывается путь по широте
то сперва прокладывается путь по широте 
4) если модуль координаты широты конечной вершины  равен модулю координаты широты исходной вершины
равен модулю координаты широты исходной вершины  но при этом значения координаты широты конечной вершины
но при этом значения координаты широты конечной вершины  и значения координаты широты исходной вершины
и значения координаты широты исходной вершины  имеют разные знаки (т.е.
имеют разные знаки (т.е.  ), то приоритеты задания векторов по долготе и по широте равны и тем самым существует два маршрута:
), то приоритеты задания векторов по долготе и по широте равны и тем самым существует два маршрута:
- сначала задается вектор пути по широте;
- сначала задается вектор пути по долготе.
Алгоритм выполнения бортовым маршрутизатором CP процедуры определения приоритета задания векторов по долготе и по широте изображена на фигуре 5.
2-ое действие. Задание бортовым маршрутизатором вектора пути по долготе.
Для определения бортовым маршрутизатором направления вектора пути по долготе  необходимо найти значение разности координат широты точки В и точки А:
необходимо найти значение разности координат широты точки В и точки А:  :
:
1) если результат вычитания положительный ( ), то вектор пути по долготе
), то вектор пути по долготе  направлен с юга на север (вверх по сфере);
направлен с юга на север (вверх по сфере);
2) если результат вычитания отрицательный ( ), то вектор пути по долготе направлен с севера на юг (вниз по сфере);
), то вектор пути по долготе направлен с севера на юг (вниз по сфере);
3) если значения координат  и
и  имеют разные знаки, то имеет место переход через ноль координат (нулевую широту - экватор);
имеют разные знаки, то имеет место переход через ноль координат (нулевую широту - экватор);
4) далее необходимо определить наличие перехода через широту 90° (т.е. полюс), с этой целью необходимо рассчитать длину пути через полюс и длину пути в обход полюса, затем сравнить значения длин пути и выбрать кратчайший:
4.1) расчет бортовым маршрутизатором длины пути через полюс:
4.1.1) определение приоритета задания векторов по долготе и по широте (согласно методики первого действия);
4.1.2) при прохождении через полюс путь по долготе состоит из двух разнонаправленных векторов:
а) вычисление значения первой составляющей вектора
 , где: при движении вверх
, где: при движении вверх  а при движении вниз
а при движении вниз 
б) вычисление значения первой составляющей вектора  где: при движении вверх
где: при движении вверх  а при движении вниз
а при движении вниз 
в) вычисление общей длины пути в градусах по долготе (суммарный вектор по долготе), равной сумме модулей векторов  и
и  :
: 
4.1.3) вычисление длины пути (вектора) по широте, согласно методики определения вектора пути по широте  (см. третье действие), перевод значения вектора пути по широте
(см. третье действие), перевод значения вектора пути по широте  в абсолютные градусы;
в абсолютные градусы;
4.1.4) сложение по модулю полученных значений векторов пути по широте и долготе:  согласно методики определения суммарной длины пути по долготе и по широте (см. четвертое действие);
согласно методики определения суммарной длины пути по долготе и по широте (см. четвертое действие);
4.2) расчет длины пути в обход полюса:
4.2.1) определение приоритета задания векторов по долготе и по широте (согласно методики первого действия);
4.2.2) вычисление длины пути (вектора) по долготе, равной модулю разности координат широты: 
4.2.3) вычисление длины пути (вектора) по широте, согласно методики определения вектора пути по широте  (см. третье действие), переводим значения вектора пути по широте
(см. третье действие), переводим значения вектора пути по широте  в абсолютные градусы;
в абсолютные градусы;
4.2.4) складываем полученные значения по модулю векторов пути по широте и долготе:  согласно методики определения суммарной длины пути по долготе и по широте (см. действие 4);
согласно методики определения суммарной длины пути по долготе и по широте (см. действие 4);
4.3) сравнение значения по модулю векторов в обход полюса  и через полюс
и через полюс  и выбираем самый короткий:
и выбираем самый короткий:
- если разность  и
и  больше нуля (
больше нуля ( ), то путь через полюс короче;
), то путь через полюс короче;
- если разность и меньше нуля ( ), то путь через полюс длиннее;
), то путь через полюс длиннее;
- если разность и равна нулю ( ), то пути одинаковые;
), то пути одинаковые;
2) если результат вычитания координат широты  и
и  равен 180° (
равен 180° ( ), то существует два одинаковых маршрута:
), то существует два одинаковых маршрута:
- через северный полюс;
- через южный полюс.
Алгоритм выполнения бортовым маршрутизатором КА процедуры задания вектора пути по долготе изображен на фигуре 6.
Алгоритм процедуры вычисления бортовым маршрутизатором КА суммарного пути через полюс изображен на фигуре 7.
Если в результате расчета бортовым маршрутизатором выявляются два одинаковых пути, то выбор между ними осуществляется следующим образом:
а) в простых алгоритмах маршрутизации выбор бортовым маршрутизатором производится случайным образом;
б) в сложных алгоритмах маршрутизации выбор бортовым маршрутизатором производится с учетом весовых коэффициентов метрики маршрута (например, с учетом загрузки канала связи).
При многопутевой маршрутизации информация передается одновременно по обоим маршрутам.
3-е действие. Задание бортовым маршрутизатором вектора пути по широте.
Для определения направления вектора пути по широте  бортовым маршрутизатором вычисляется значение разности координат долготы В и А:
бортовым маршрутизатором вычисляется значение разности координат долготы В и А: 
1) если результат вычитания положительный ( ), то вектор пути по широте
), то вектор пути по широте  направлен с запада на восток (вправо по сфере);
направлен с запада на восток (вправо по сфере);
2) если результат вычитания отрицательный ( ), то вектор пути по широте
), то вектор пути по широте  направлен с востока на запад (влево по сфере);
направлен с востока на запад (влево по сфере);
3) если значения координат λb и λа имеют разные знаки и сумма модулей ϕb и ϕа меньше 180° (|λb|+|λа|<180°), то осуществляется переход через координату 0° (нулевую долготу);
4) если значения координат ϕb и ϕа имеют разные знаки и сумма модулей ϕb и ϕа больше 180° (|λb|+|λa|>180°), то осуществляется переход через координату 180° (долготу 180°). При прохождении через долготу 180° путь состоит из двух равнонаправленных векторов:
а) вычисляется первый вектор:  , где: при движении в западном полушарии λ180°=180°, а при движении в восточном полушарии λ180°=- 180°;
, где: при движении в западном полушарии λ180°=180°, а при движении в восточном полушарии λ180°=- 180°;
б) вычисляется второй вектор:  , где: при движении в западном полушарии λ180°=180°, а при движении в восточном полушарии λ180°=- 180°;
, где: при движении в западном полушарии λ180°=180°, а при движении в восточном полушарии λ180°=- 180°;
в) вычисляется общая длина пути в градусах по широте (суммарный вектор по широте), равной сумме модулей векторов  и
и  :
:  ;
;
2.5) если значения координат λb и λа имеют разные знаки и модуль суммы этих координат равен 180° (|λb|+|λа|=180°), то существует два одинаковых маршрута:
- через нулевую координату;
- через координату 180°.
2.6) для определения длины пути в абсолютных градусах полученная длина пути в градусах по широте  умножается на коэффициент изменения абсолютной длины градуса широты
умножается на коэффициент изменения абсолютной длины градуса широты  .
.
Алгоритм выполнения бортовым маршрутизатором КА процедуры задания вектора пути по широте изображен на фигуре 8.
4-ое действие. Определение бортовым маршрутизатором суммарной длины пути по долготе и по широте dab.
Для вычисления общей длины пути от А до В бортовым маршрутизатором суммируются полученные значения по модулю векторов пути по широте и долготе: 
Алгоритм выполнения бортовым маршрутизатором КА процедуры определения суммарной длины пути по долготе и по широте dab изображен на фигуре 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАРШРУТИЗАЦИИ ПОТОКОВ ИНФОРМАЦИИ, КРИТИЧНОЙ К ЗАДЕРЖКАМ, В СЕТИ СПУТНИКОВОЙ СВЯЗИ НА НЕГЕОСТАЦИОНАРНЫХ КОСМИЧЕСКИХ АППАРАТАХ, СВЯЗАННЫХ МЕЖСПУТНИКОВЫМИ ЛИНИЯМИ СВЯЗИ В ОДНОЙ ОРБИТАЛЬНОЙ ПЛОСКОСТИ И РАСПОЛОЖЕННЫХ НА КРУГОВЫХ ОРБИТАХ | 2022 |
|
RU2799503C1 |
| Система персональной подвижной спутниковой связи на основе сети низкоорбитальных спутников-ретрансляторов, обеспечивающая предоставление доступа в сеть Internet с носимого персонального абонентского терминала | 2021 |
|
RU2754947C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| Способ зональной регистрации абонентского терминала сети персональной спутниковой связи | 2017 |
|
RU2658879C1 |
| Способ высокоточного позиционирования аппарата на поверхности Луны и устройство для его осуществления | 2018 |
|
RU2692350C1 |
| Устройство адаптивной маршрутизации IP-пакетов на борту космического аппарата в спутниковых сетях связи | 2023 |
|
RU2823151C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОСАДКЕ В ЗАДАННУЮ ОБЛАСТЬ ПОВЕРХНОСТИ ПЛАНЕТЫ | 2014 |
|
RU2590775C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| ЭФФЕКТИВНЫЙ СПОСОБ ПРИВЯЗКИ МЕСТОПОЛОЖЕНИЯ | 2009 |
|
RU2523171C2 |

Изобретение относится к маршрутизации передачи информации. Технический результат заключается в повышении точности расчетов кратчайшего пути маршрутизации, повышении быстродействия работы и снижении вычислительной нагрузки бортового маршрутизатора космического аппарата (КА). Технический результат достигается тем, что для маршрутизации координаты КА задают в двухмерной сферической системе координат, рассчитывают угловое расстояние между КА с учетом изменения длины пути, эквивалентной градусу широты, на поверхности сферы при удалении от экватора и приближении к полюсам. Каждый КА расположен на поверхности сферы, описываемой орбитами, и соединен межспутниковыми линиями с четырьмя соседними. Расстояния в километрах, эквивалентные одному градусу lэ по широте dϕ на экваторе и по долготе dλ, равны и приняты за единицу расчета расстояний «абсолютный градус». Расстояние, измеренное по широте в градусах, переводится в абсолютные градусы в зависимости от высоты широты с учетом коэффициента изменения абсолютной длины градуса широты cosϕ. 1 з.п. ф-лы, 9 ил., 1 табл.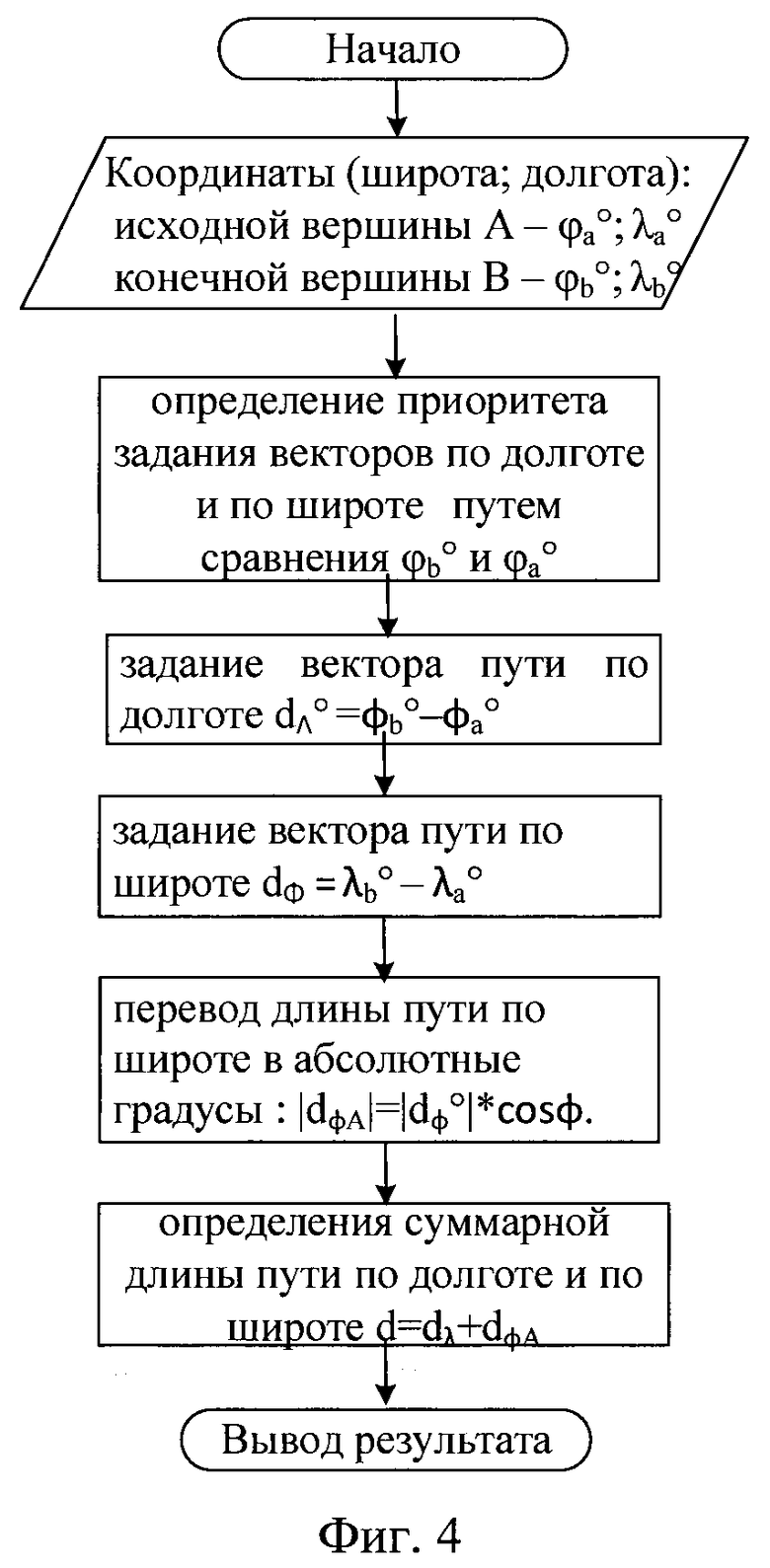
1. Способ маршрутизации потоков информации, критичной к задержкам в полносвязанной сети спутниковой связи на негеостационарных космических аппаратах, расположенных на однородных круговых орбитах, включающий нахождение кратчайшего пути маршрутизации, отличающийся тем, что координаты космических аппаратов задают в двухмерной сферической системе координат, рассчитывают угловое расстояния между космическими аппаратами в двухмерной сферической системе координат с учетом изменения длины пути, эквивалентной градусу широты на поверхности сферы, при удалении от экватора и приближении к полюсам, при этом основные параметры двухмерной сферической системы координат таковы, что каждый космический аппарат расположен на поверхности сферы, описываемой орбитами, и соединен межспутниковыми линиями с четырьмя соседними, образуя полносвязанную сеть передачи данных, в предлагаемой двухмерной сферической системе координат расстояния в километрах, эквивалентные одному градусу lэ по широте dϕ на экваторе и по долготе dλ, равны и приняты за единицу расчета расстояний под названием «абсолютный градус», для подсчета суммарного длины пути по широте и долготе расстояние, измеренное по широте в градусах, переводится в абсолютные градусы в зависимости от высоты широты с учетом коэффициента изменения абсолютной длины градуса широты cosϕ, методика определения кратчайшего пути на поверхности сферы в двухмерной сферической системе координат состоит из четырех действий: определение приоритета задания векторов по долготе и по широте, задание вектора пути по долготе dλ, задание вектора пути по широте dϕ, перевод значения углового расстояния по широте в абсолютные градусы, определение суммарной длины пути по долготе и по широте dab.
2. Способ маршрутизации по п. 1, отличающийся тем, что определение вектора как по долготе, так и по широте заключается в определении направления вектора и затем расчета его скалярного значения.
| Способ маршрутизации в сетях подвижной персональной спутниковой связи на низкоорбитальных спутниках-ретрансляторах с зональной регистрацией абонентов и маршрутизатор низкоорбитального спутника ретранслятора с интегрированными службами для осуществления указанного способа | 2019 |
|
RU2714220C1 |
| CN 109714270 A, 03.05.2019 | |||
| US 6249513 B1, 19.06.2001 | |||
| CN 106656302 B, 27.09.2019 | |||
| US 9094856 B1, 28.07.2015. | |||

