Область применения заявляемого изобретения – альтернативные поршневые двигатели внутреннего сгорания (далее ПДВС).
Уровень техники
Исходными данными для создания всех возможных вариантов конструкций ПДВС являются пара результирующих сил давления рабочего тела на рабочие поверхности поршня и цилиндра, и то, каким образом, эта пара сил используется в процессе преобразования в движущую силу вращения вала отбора мощности, эти данные и определяют эффективность каждой конкретной конструкции. Определяющим фактором эффективности в данном случае является соотношение величин движущей силы вращения и силы давления в цилиндре.
Во всех известных ПДВС (далее термодинамические Прототипы):
с КРИВОШИПНО-ШАТУННЫМ МЕХАНИЗМОМ (КШМ) [1],
в БЕСШАТУННОМ БАЛАНДИНА [2],
в РОТОРНО-ПОРШНЕВОМ ВАНКЕЛЯ [3]
используется сила давления рабочего тела на поршень, а сила давления рабочего тела на цилиндр нейтрализуется фиксированным соединением цилиндра с корпусом двигателя. При этом преобразование силы давления в движущую силу вращения вала отбора мощности осуществляется посредством передаточного механизма поршень-вал. То есть в настоящее время ПДВС без передаточных механизмов неизвестны из уровня техники.
Недостатком конструкций ПДВС с передаточными механизмами вращения является неадекватность силы давления на поршень и движущей силы вращения в процессе рабочего цикла, проявляющаяся в том, что величина движущей силы вращения на выходе передаточного механизма не равна величине силы давления на входе, причём, на интегральном уровне, суммарная за цикл величина движущей силы вращения меньше суммарной за цикл величины силы давления на поршень. Это
значит, что только часть силы давления на поршень передаётся в движущую силу вращения вала отбора мощности: 0.376 для ПДВС с КШМ, 0.688 для ПДВС Баландина, 0.344 для роторно-поршневого ДВС Ванкеля [4].
С другой стороны, остальная часть силы давления рабочего тела на поршень (плюс сила давления на цилиндр) синхронно трансформируется в непрерывно изменяющиеся по направлению и величине непроизводительные деструктивные силы, нагружающие составляющие элементы передаточного механизма, вал, цилиндры и корпус двигателя, что приводит к технологическим и эксплуатационным проблемам прочности, уравновешенности, надежности, долгосрочности ресурса работы и технического обслуживания.
Наиболее близким к заявляемому устройству по конструкции является РОТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ ГЕРОНА АЛЕКСАНДРИЙСКОГО [5] (далее – кинематический Прототип), в котором крутящий момент создаётся в результате тангенциального воздействия силы реактивной тяги на радиальные консоли, фиксировано соединённые с валом двигателя и его современный вариант – СТРУЙНО-РЕАКТИВНАЯ ТУРБИНА [6], «содержащая ротор, выполненный в виде вала по меньшей мере с одним осевым каналом и по меньшей мере с одним рабочим колесом, имеющим на периферии по меньшей мере одно тяговое сопло, сообщенное с торцевым входом осевого канала газовым трактом, и по меньшей мере одно уплотнительное газодинамическое подводящее устройство….».
Недостатком данного кинематического Прототипа является существенно больший расход топлива, необходимый для создания реактивной силы тяги, сравнимой по величине с силой давления рабочего тела в цилиндре ПДВС.
Сущность изобретения
Целевая задача заявляемого технического решения (далее – Проекта) – увеличить движущую силу вращения вала отбора мощности по сравнению с вышеуказанными кинематическим и термодинамическими Прототипами.
Сущность Проекта в плане решения этой задачи состоит в том, что вместо реактивных модулей-сопел в конструкции кинематического Прототипа используются роторно-поршневые устройства.
Техническим результатом такого решения-изобретения является:
1. реализация возможности исключения передаточного механизма вращения вала отбора мощности, и, как следствие, обеспечение адекватности силы давления рабочего тела и движущей силы вращения и уменьшение механических потерь;
2. увеличение силы тяги модулей-движителей, и, как следствие, увеличение крутящего момента на валу двигателя.
Указанный технический результат достигается тем, что в заявляемом ротационном роторно-поршневом устройстве роторно-поршневые модули-движители фиксировано соединены с валом отбора мощности таким образом, что в процессе рабочего цикла линия действия результирующих сил давления рабочего тела на рабочие поверхности статора и ротора, ограничивающие рабочий объём модуля, перпендикулярна линии оси вала. Детали ниже, в разделе Осуществление изобретения.
Осуществление изобретения
Краткое описание иллюстраций
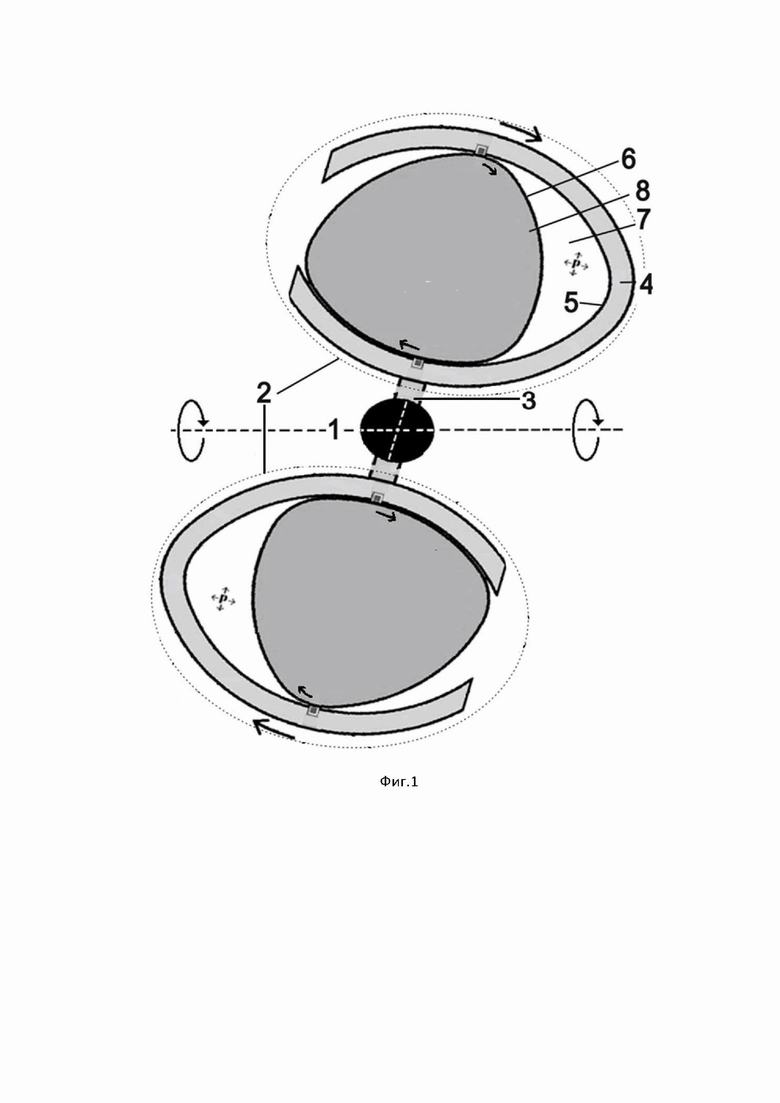
На фиг. 1 показана общая принципиальная схема ротационного роторно-поршневого устройства.
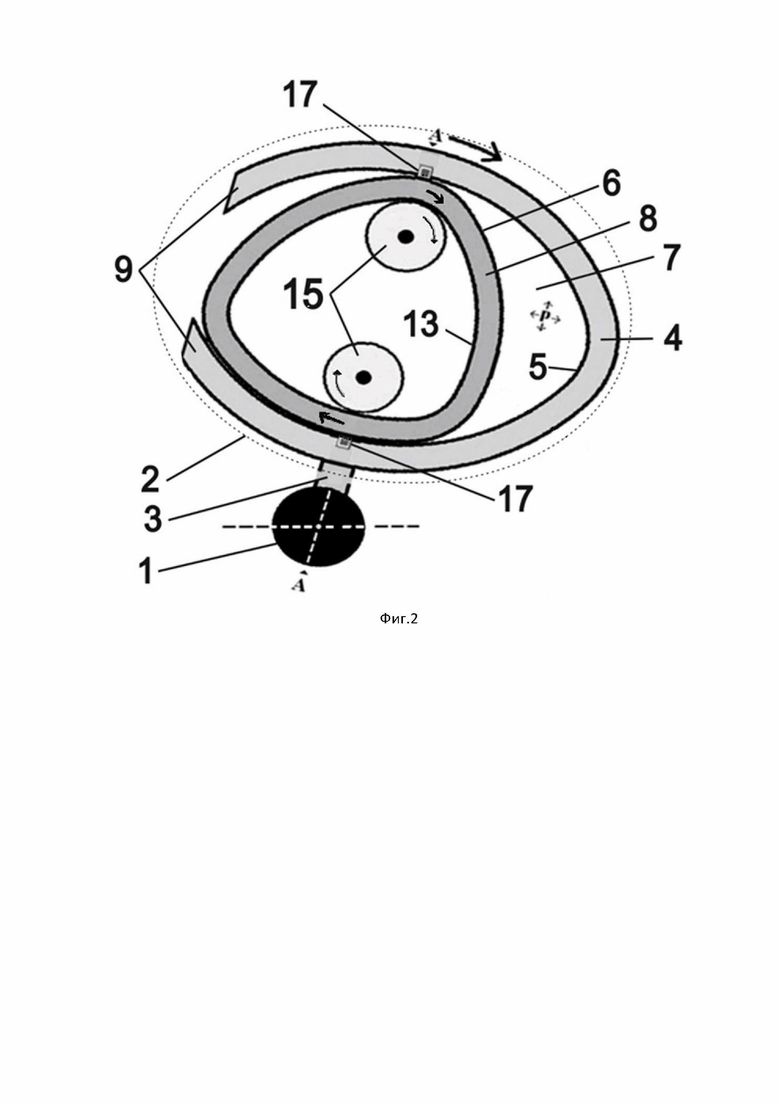
На фиг. 2 показана принципиальная схема автоэквидистантального ротационного роторно-поршневого устройства (далее – Проект А) в сечении плоскостью движения.
На фиг. 3 показана принципиальная схема Проекта А в сечении осевой плоскостью.
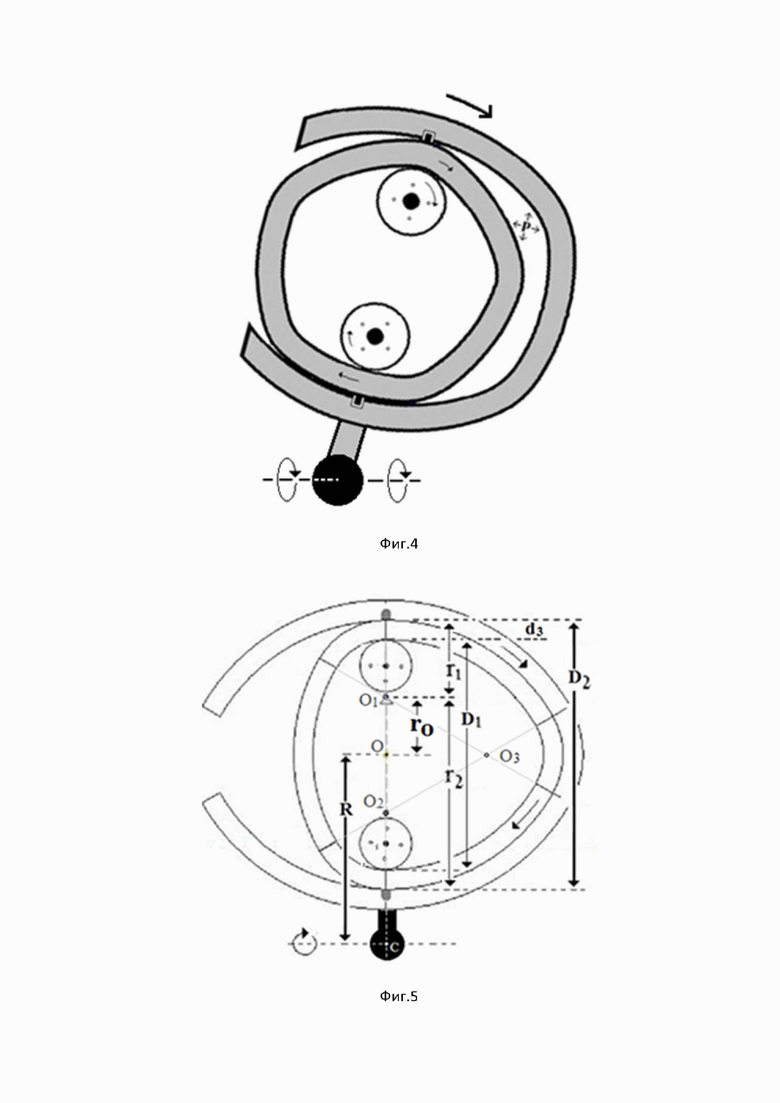
На фиг. 4 показана принципиальная схема Проекта А с пятиугольным ротором.
На фиг. 5 показана карта геометрических параметров Проекта А.
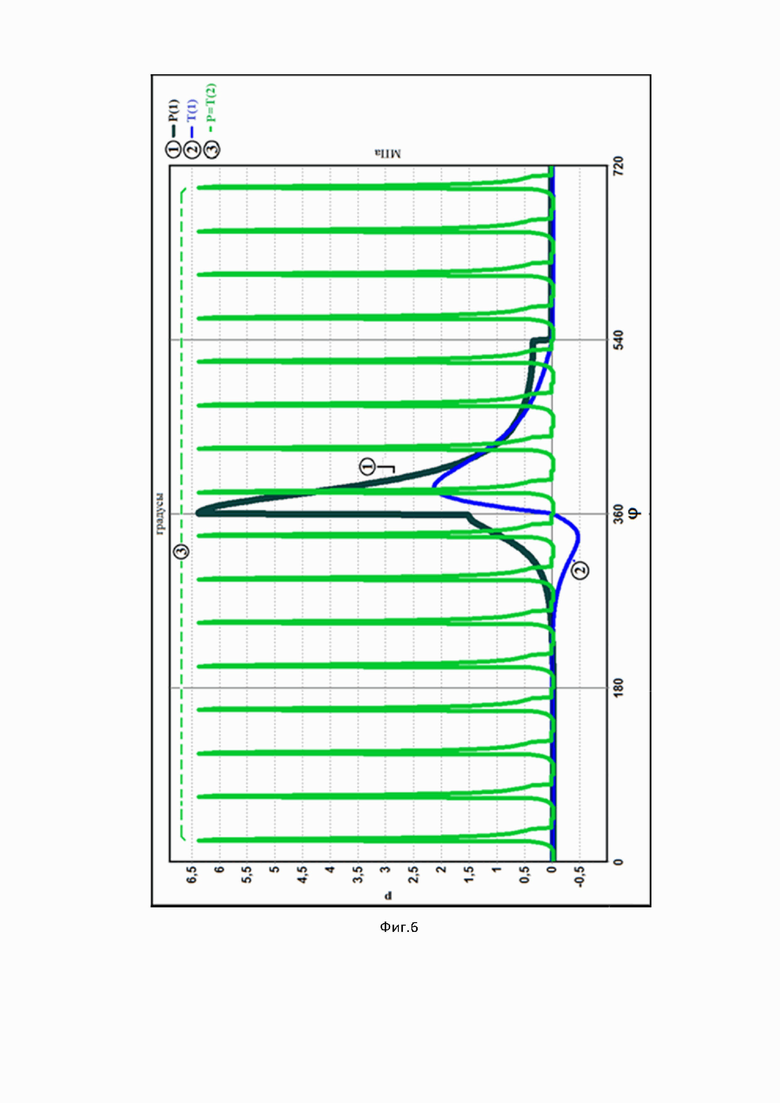
На фиг. 6 показаны индикаторные диаграммы.
На схемах фиг.1, 2 ,3 обозначено:
1 – вал отбора мощности, 2 – роторно-поршневые модули-движители, 3 – консоль,
4 – статор, 5 – рабочая поверхность статора, 6 – рабочая внешнюю поверхность ротора, 7 – рабочий объём, 8 – ротор, 9 – радиальная секция статора, 10 – боковые секции, 11 – внутренние рабочие поверхности боковых секций, 12 – боковые стенки статора, 13 – внутренняя опорная поверхность ротора, 14 – боковые поверхности кольца ротора, 15 – опорные катки, 16 – подшипники, 17 – радиальные уплотнения, 18 – торцевые уплотнения.
Варианты осуществление изобретения
1. (Проект)
РОТАЦИОННОЕ РОТОРНО-ПОРШНЕВОЕ УСТРОЙСТВО, включающее вал отбора мощности 1, роторно-поршневые модули-движители 2, в циклически переменных рабочих объёмах которых осуществляются термодинамические циклы двигателя внутреннего сгорания и систему циклической генерации рабочего тела, отличающееся тем, что составляющие роторно-поршневые модули-движители 2 фиксировано соединены с валом отбора мощности 1 посредством консолей 3 по схеме вал-консоль-корпус статора 4 таким образом, что в процессе рабочего цикла линия действия результирующих сил давления рабочего тела на рабочую поверхность статора 5 и рабочую внешнюю поверхность ротора 6, ограничивающие рабочий объём 7 роторно-поршневого модуля-движителя 2, перпендикулярна линии оси вала отбора мощности 1;
при этом движущая сила вращения вала отбора мощности 1 является суммарным результатом динамического воздействия на рабочие поверхности статора 5 и ротора 6 и последующей, обусловленной кинематикой устройства, трансформации результирующих сил давления рабочего тела;
пространственное расположение линия действия, область действия, точка приложения действия, а также радиус и величина действия результирующих сил давления и движущей силы вращения определяется геометрией линии сопряжения статора 4 и ротора 8;
область действия определяется как замкнутая область на осевой плоскости, проходящей через линию оси вала отбора мощности 1 перпендикулярно линии действия, ограниченная проекцией линии сопряжения;
точка приложения действия находится в геометрическом центре области действия;
радиус действия равен расстоянию между линией оси вала отбора мощности 1 и точкой приложения;
величина действия сил давления рабочего тела равна величине давления в рабочем объёме 7, умноженной на величину площади области действия;
результирующая сила давления рабочего тела на рабочую поверхность статора 5 действует как реактивная сила тяги и непосредственно осуществляет функцию движущей силы вращения вала отбора мощности 1 от статора 4.
Данная формулировка описывает множество возможных вариантов осуществления Проекта (например, в качестве модулей-движителей можно использовать специальным образом модифицированные устройства роторно-поршневого двигателя Ванкеля). Далее приводится описание конкретного варианта (Проект А) реализации Проекта, отличающегося тем, что в качестве роторно-поршневых модулей-движителей используются модифицированные автоэквидистантальные роторно-поршневые устройства [7, 8, 9].
2. (Проект А)
РОТАЦИОННОЕ РОТОРНО-ПОРШНЕВОЕ УСТРОЙСТВО, отличающееся автоэквидистантальными роторно-поршневыми модулями-движителями 2, которые является плоскими механизмами с плоскостями движения, перпендикулярными осевой плоскости и включает автоэквидистантальные статор 4 и ротор 8;
автоэквидистантальный статор 4 состоит из замыкающих рабочий объём 7 фиксировано соединённых радиальной секции статора 9 и двух боковых секций 10 с внутренними рабочими поверхностями боковых секций 11, ограничивающими, вместе с рабочими поверхностями статора 5 и ротора 6, рабочий объём 7;
радиальная секция статора 9 имеет форму овального полукольца с рабочей поверхностью статора 5, кинематически огибающей рабочую поверхность ротора 6 в процессе позиционирования ротора 8 относительно статора 4 при виртуально неподвижном положении модуля;
боковые секции 10 герметично фиксировано соединены с соответствующими боковыми стенками статора 12 по всему периметру полукольца статора 4;
ротор 8 имеет овально-кольцеобразную форму и включает рабочую внешнюю поверхность ротора 6 и внутреннюю опорную поверхность ротора 13, эквидистантные самим себе в плоскостях движения, при этом все контуры радиальных поверхностей ротора 8 в плоскостях движения эквидистантны между собой;
в процессе позиционирования ротора 8 относительно статора 4 внутренние рабочие поверхности боковых секций 11 касательно сопряжены с соответствующими боковыми поверхностями кольца ротора 14;
позиционирование ротора 8 относительно статора 4 в процессе функционирования рабочего объёма 7 осуществляется путём механического обкатывания внутренней опорной поверхностью ротора 13 пары свободно вращающихся опорных катков 15, устанавливаемых на подшипниках 16 в боковых секциях 10;
линии осей вращения опорных катков 15 располагаются в осевой плоскости; контактное взаимодействие ротора 8 с опорными катками 15 и ротора 8 со статором 4 осуществляется по линиям пересечения, соответственно, опорных и рабочих поверхностей с осевой плоскостью;
герметичность рабочего объёма 7 обеспечивают радиальные уплотнения 17, устанавливаемые в рабочей поверхности статора 5 в местах пересечения с осевой плоскостью и торцовые уплотнения 18, устанавливаемые в боковых поверхностях кольца ротора 14.
Функционирование Проекта.
Ротационное роторно-поршневое устройство функционирует по следующей схеме:
→ φ → α → V → p → P → T → M → , где
φ – угол поворота валу отбора мощности;
α = α (φ) – угол поворота ротора относительно статора в момент φ;
V = V(α(φ)) – рабочий объём в момент α(φ);
p = p(V) = p ⋅ (V(α(φ))) – давление рабочего тела в момент α(φ);
P = p ⋅ F – величина силы давления в момент α(φ);
F – площадь области действия давления рабочего тела;
T = P ⋅ Ψ= p ⋅ F ⋅ Ψ – величина движущей силы вращения в момент α(φ);
Ψ = Ψ(α(φ)) – передаточная функция вращения;
M = MT + Mj – результирующий крутящий момент на валу отбора мощности;
MT = MЦ + MП – суммарный крутящий момент от статора и ротора;
MЦ , MП , Mj – крутящие моменты от, соответственно, статора, ротора, сил инерции;
MT = T⋅R = P⋅Ψ⋅R = p⋅F⋅Ψ⋅R ,
R – радиус действия движущей силы вращения,
передаточная функция вращения Ψ формально находится из уравнения:
Wi = WM , где
Wi – индикаторная работа цикла,
WM = WЦ + WП – суммарная работа крутящего момента M,
WЦ , WП – работа крутящего момента от, соответственно, статора, ротора:
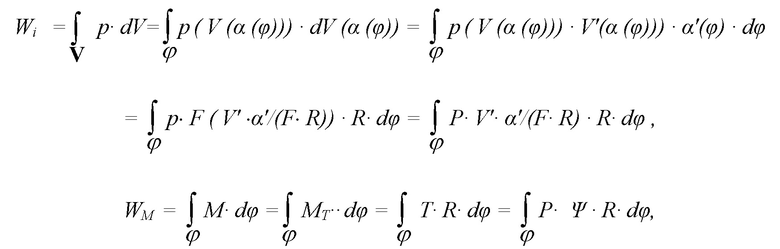
откуда следует:
Ψ (α (φ)) = V' ⋅ α'/(F ⋅ R).
Оценка эффективности Проекта
Представленная ниже система вычисления оценок эффективности Проекта построена по методике кинематического сравнительного анализа ПДВС, альтернативной классической методологии индикаторных и эффективных показателей [4].
Целесообразность применения этой методики обоснована тем, что по определению, при условии одних и тех же параметров генерации рабочего тела и термодинамических процессов функционирования, индикаторные показатели КПД; ηi, мощность Ni, удельный расход топлива gi не зависят от конструкции и кинематики передаточных механизмов поршень-вал (т.е., например, если в реальном ПДВС заменить КШМ на бесшатунный передаточный механизма вращения Баландина, то ηi , Ni , gi не изменятся).
Данная методика работает по следующей схеме:
1) определяются объекты сравнения, условно именуемые: Прототип (1) и Проект (2);
2) определяются условия сравнения, исключающие зависимость искомых сравнительных
оценок от прочих параметров сравниваемых объектов;
3) определяются аналитические способы вычисления сравнительных оценок.
Применительно к заявляемому устройству:
1) объекты сравнения:
1а) Прототип (1) – ПДВС;
1б) Проект (2) – вариант осуществления Проекта (далее Проект Р (расчётный)), отличающийся признаками-условиями:
α' = qφ = const > 0, V' = ± qV , где
qV = const > 0, «+» – процесс расширения|впуска, «-» – процесс сжатия|выпуска;
2) условия сравнения:
2а) термодинамическая эквивалентность Проекта (2) и Прототипа (1);
2б) одинаковый расход топлива.
Детали:
1) Объекты сравнения:
1а) Объект сравнения Прототип (1) – рассматриваются два варианта:
Прототип (1К) – ПДВС с КШМ, Прототип (1В) – РПД Ванкеля.
1б) Объект сравнения Проект (2) – Проект Р (расчётный).
Условие V' = ± qV, qV = const > 0 означает, что Проект Р является вариантом осуществления Проекта А, в котором контуры радиальных (опорной и рабочей) поверхностей ротора в плоскостях движения эквидистантны виртуальному производящему правильному многоугольнику Рёло [10] и отличаются тем, что имеют форму геометрической композиции, составленной из последовательно касательно-сопряжённых круговых дуг большого радиуса – эквидистант сторон и малого радиуса – эквидистант вершин производящего многоугольника,
при этом, все составляющие круговые дуги имеют одинаковую угловую длину, разности производящих радиусов большой минус малый одинаковы и равны диаметру производящего многоугольника, сумма производящих радиусов большой плюс малый равна диаметру контура.
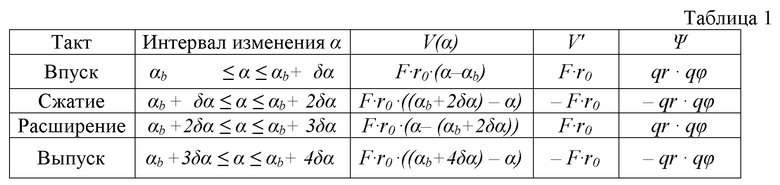
Функционирование передаточных функций V (α (φ)) и Ψ (α (φ)) = V'⋅α'/(F R) Проекта Р в рабочем процессе обкатывания опорных катков ротором показано в таблице 1, где:
r0 = D0 / 2, qr = r0 / R, δα = π/k, qV = F⋅r0, где
D0 – диаметр производящего многоугольника Рёло,
r0 – радиус производящего многоугольника Рёло,
δα – радианная длина составляющих круговых дуг радиальных контуров ротора,
k = 3, 5, … – число вершин производящего правильного многоугольника Рёло – форм-фактор ротора,
αb = α в начальный момент цикла:
Условие: α' = qφ = const > 0 предполагает механическую синхронизацию ротора и вала отбора мощности. Возможное техническое решение – тандем мультипликатор – шарнир равных угловых скоростей (ШРУС), связывающий ось вала и центральную ось ротора.
Обозначенные выше условия переводят зависимость параметров функционирования и, в частности, параметров сравнения Проекта Р от определяющих кинематических передаточных функций φ → α и α → V в параметрическую зависимость, что упрощает калькуляцию сравнительных оценок технического результата.
Варианты осуществления Проекта Р показаны на фиг. 2, 3, 4.
На фиг.5 представлена карта геометрических параметров Проекта Р, где:
O1 , O2 , O3 – вершины производящего правильного многоугольнику Рёло;
O1 – центр вращения ротора в процессе расширение-выпуск,
O2 – центр вращения ротора в процессе впуск-сжатие,
O – геометрический центр области действия давления рабочего тела;
C – ось вала отбора мощности;
r1 , r2 – производящие радиусы рабочей поверхности ротора;
D1 , D2 – диаметры, соответственно, опорной и рабочей поверхностей ротора;
d3 – радиальный размер обода кольца ротора;
ro = (r2 ─ r1) / 2;
R – радиус действия виртуального кривошипа.
2) Условия сравнения:
2а) Термодинамическая эквивалентность Проекта и Прототипа подразумевает:
а.1) одинаковые параметры генерации и термодинамики рабочего тела, а именно:
ε (2) = ε (1) = ε, где ε – степень сжатия;
pi (2) = p i (1) = p I , p i – среднее индикаторное давление рабочего тела в цилиндре.
а.2) одинаковые состав и соотношение составляющих рабочего тела, откуда, в частности, следует:
gтц (2) = gтц (1) = gтц , где
gтц = Gтц / (ΔV ⋅ ε/(ε–1)) – удельный цикловой расход топлива,
Gтц – цикловой расход топлива,
ΔV – рабочий объём.
2б) Условие одинакового расхода топлива:
Gт (2) = Gт (1) , Gт = Gтц /Δt – (секундный) расход топлива, где
Δt – временной период рабочего цикла.
3) Метод вычисления сравнительных оценок:
вычисления осуществляются последовательной суперпозицией мультипликативного функционального оператора Θ(i) = (i)(2) / (i)(1) относительной сравнительной оценки параметра (i) сравниваемых объектов, где (i)(1) и (i)(2) – одноимённые параметры, соответственно, Прототипа (1) и Проекта (2) (конкретный пример: ΘM = 2 означает, что крутящий момент M(2) Проекта в два раза больше крутящего момента M(1) Прототипа):
Θ((i1) (i2)) = Θ(i1) Θ(i2), Θ((i1) / (i2)) = Θ(i1) / Θ(i2), Θ (const (i)) = const Θ(i).
Применительно к принятым выше условиям сравнения (детали в [4] и [11]):
а) Θpi = 1 → ΘWM = ΘWi = Θpi ΘΔV = ΘΔV;
Θε = 1 → Θ(ΔV ε / (ε –1)) = ΘΔV;
Θgтц = 1 → ΘGтц = Θ(ΔV⋅ε /(ε–1)) = ΘΔV;
б) ΘGт = 1 → ΘGтц = ΘΔV = ΘΔt.
Из предыдущего следует:
ΘM = Θ(WM /Δφ) = ΘWi / ΘΔφ = ΘΔV/ ΘΔφ = ΘΔt / ΘΔφ = 1/Θω,
ΘNi = ΘWi / ΘΔt = ΘWi / ΘΔV =1,
Θgi = ΘGт / ΘNi = 1,
Θηi = (ΘWi / ΘGтц) / ΘHu = ΘΔV/ ΘGтц = 1, где
Hu – низшая теплота сгорания топлива (ΘHu =1 – условие термодинамической эквивалентности Проекта и Прототипа).
4) Вычисление сравнительных оценок Проекта Р / Прототипа (1К) (ПДВС с КШМ).
Калькулятор представлен в таблице 2.
k, F, R, r0, qr = r0 / R(2) , qφ , qΨ = qr ⋅ qφ – выше, ΘFR = Θ(F⋅R) = ΘF⋅ΘR,
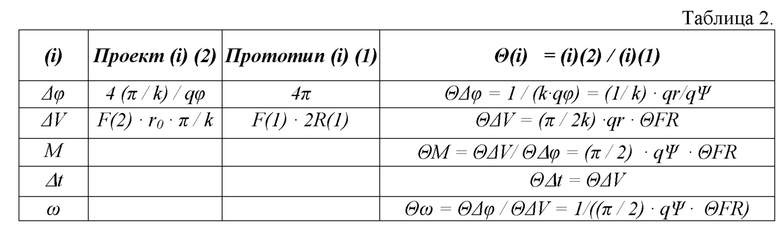
Калькуляция:
при ΘFR = 1, k =3, qr = 0.1, 0.5, 1 и qΨ = 1, 5, 10 калькулятор выдаёт следующие результаты, представленные в таблице 3:
Таблица 3
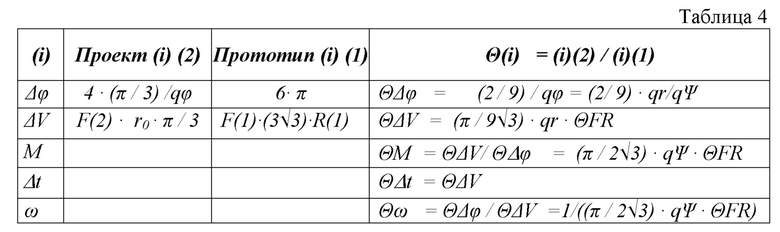
Вычисление сравнительных оценок Р-Проект / Прототип (1В) (РПД Ванкеля)
при тех же условиях и k =3:
Калькулятор представлен в таблице 4.
Калькуляция: таблица 5.
Таблица 5
Детали
1 / ΘΔV – показывает во сколько раз рабочий объём ΔV(2) Проекта меньше рабочего объёма ΔV(1) Прототипа;
ΘM – во сколько раз крутящий момент M (2) Проекта больше крутящего момента M (1) Прототипа;
Δφ(2)º – угловая длина рабочего цикла Проекта против Δφ(1)º = 720º Прототипа.
В данном случае определяющими факторами меньшего рабочего объёма и большего крутящего момента Проекта по сравнению с Прототипом при обозначенных выше условиях сравнения являются меньшая угловая длина Δφ и большая частота ν = 1/ ΘΔt = 1 / ΘΔV показывающая число циклов Проекта за время одного цикла Прототипа.
Как это отражается на передаточной функции φ → V → P показано на фиг.6, где:
1) PП (1) – сила давления рабочего тела на рабочую поверхность поршня Прототипа;
2) T (1) – движущая сила, тангенциально воздействующая на кривошип Прототипа;
3) PЦ (2) = TЦ (2) – движущая сила цилиндра-статора, тангенциально воздействующая на виртуальный кривошип Проекта;
исходные данные – в разделе Оценки эффективности Проекта. qr = 0.3, qΨ =1.57.
Сравнение движущей силы Проекта Р и силы реактивной тяги
Проект Р функционально аналогичен пульсирующему реактивному двигателю (далее Аналог).
При условии термодинамической эквивалентности рабочих процессов (одинаковые температура и давление рабочего тела в камере сгорания и расход составляющих ингредиентов рабочей горючей смеси) сила PА реактивной тяги Аналога оказывается меньше силы PП. крутящего момента Проекта Р Это показывает результат приведенного ниже сравнительного анализа:
PА = v ⋅ G (Н) [12] , где
G – расход рабочего тела (кг/с),
v – скорость истечения рабочего тела (м/с) [13], которая выражается как:
v =
 , где
, где
T – абсолютная температура рабочего тела в камере сгорания (К),
R = 8.31 – универсальная газовая постоянная (Дж/(моль·К)),
M – молярная масса рабочего тела (кг/моль),
k – показатель адиабаты рабочего тела,
pz – давление рабочего тела в камере сгорания (МПа),
pe – давление рабочего тела на выходе (МПа).
Из вышеуказанного условия термодинамической эквивалентности сравниваемых объектов и из данных поршневого объекта (Прототип выше [11]) следует:
T = TА = TП =2848, k =kА = kП =1.2605;
pz = pzА = pzП = 5.5021, pe = peА= peП = 0.4452;
M = MА = MРП = l1/M2 = 15.35872/(0.536⋅1000) = 28.6543/1000, где
L1 , M2 – соответственно, масса кг, количество кмоль рабочего тела на 1 кг топлива,
G = GА = GП = GТ l1/3600 = 18.186⋅15.35872/3600 = 279.31368192/3600
(GТ – расход топлива кг/ч);
v = 1800.2;
результат: PА ≈ 140 << PП ≈ 812Н, QP = PП / PА ≈ 5.8. (Прототип выше, [11]).
Достижение технического результата
1. Передаточный механизм:
цилиндр-статор роторно-поршневого модуля-движителя заявляемого устройства-Проекта совмещает функции поршня и кривошипа, что исключает необходимость использования передаточного механизма вращения вала отбора мощности и обеспечивает адекватность силы давления рабочего тела и движущей силы вращения, а также уменьшение механических потерь.
2. Сравнение движущей силы Проекта и реактивной силы тяги:
при условии термодинамической эквивалентности рабочих процессов (одинаковые температура и давление рабочего тела в камере сгорания и расход составляющих ингредиентов рабочей горючей смеси), движущая сила вращения вала отбора мощности Проекта больше силы тяги пульсирующего реактивного двигателя – расчётное значение для конкретных параметров поршневого объекта сравнения – более чем в 5.8 раз.
Данная оценка доказывает конкурентоспособность заявляемого устройства по сравнению с реактивными двигателями, работающими по аналогичной ротационной схеме.
3. Сравнение Проекта и ПДВС с КШМ-Прототипом.
Вышеуказанные в п.2 оценки эффективности Проекта применимы ко всему многообразию вариантов осуществления Проекта. Для конкретного варианта реализации Проекта достижение технического результата включает ещё оценки эффективности, вычисленные по методике сравнительного анализа, исходя из определяющих параметров сравниваемых объектов и условий сравнения. В данном случае:
– объекты сравнения:
Проект Р – расчётный вариант реализации Проекта, отличающийся линейной синхронизацией ротора с валом отбора мощности и рабочим объёмом:
– Прототип – (П) ПДВС с КШМ и (В) РПД Ванкеля;
– условия сравнения:
термодинамическая эквивалентность рабочих процессов (одинаковые температура и давление в камере сгорания и соотношение ингредиентов горючей смеси);
одинаковый расход (за единицу времени) топлива сравниваемых объектов;
результаты сравнения:
– меньшая угловая длина рабочего цикла,
расчётные значения: (П) 2.4º - 120º - 240º, (В) 1.6º - 80º-160º против 720 º Прототипа,
– большая частота рабочих циклов,
расчётные значения: (П) в 2 – 4 – 20 раз, (В) в 5 – 10 – 50 раз,
– меньший рабочий объём,
расчётные значения – (П) в 2 - 4 - 19 раз, (В) в 5 -10 - 50 раз,
– больший крутящий момент,
расчётные значения: (П) в 1.6 - 8 -16 раз, (В) в 1 - 4.5 - 9 раз.
Таким образом, достижение технического результата заявляемого изобретения позволяет в перспективе создавать суперкомпактные, сверхлёгкие, и, в тоже время, с высокой мощностью двигатели для винтокрылых летательных аппаратов (вертолётов, БПЛА), что является в настоящее время актуальной задачей в военном и гражданском авиастроении.
Список использованных источников
1. https://ru.wikipedia.org/wiki/Кривошипно-шатунный_механизм.
2. Баландин С.С. Бесшатунные поршневые двигатели внутреннего сгорания. М.: Машиностроение, 1968.
3. Бениович В.С., Апазиди Г.Д., Бойко А.М. Ротопоршневые двигатели. М.: Машиностроение, 1968.
4. А.Ф.Равич., Кинематический КПД ПДВС. Ж. Двигатель, 2021 №3, Стр.42-44.
5. https://translate.academic.ru/эолипил/ru/.
6. RU2015124654 (A), опубл. 10.01.2017 г.
7. Machine a piston rotatif. Victoriano Martinez Ortega. Fr. Brevet d'invention. P.V. № 902.819 №1.327.607. 1963.
8. Автоэквидистантальное роторно-поршневое устройство. А.Ф.Равич, Патент RU75219U1. 2006-2008.
9. Автоэквидистантальное роторно-поршневое устройство. А.Ф.Равич, С.Н.Богданов.
Ж. Двигатель. 2014. №4(94). Стр.34-36, Ж. Двигателестроение. 2015. №2. Стр.20-24].
10. https://ru.wikipedia.org/wiki/Многоугольник_Рёло.
11. А.И.Колчин, В.П.Демидов. Расчёт автомобильных и тракторных двигателей. М. Высшая школа. 2008.
12. https://ru.wikipedia.org/wiki/Реактивная_тяга.
13. https://ru.wikipedia.org/wiki/ Сопло_Лаваля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСУЩЕСТВЛЕНИЯ РАБОЧЕГО ЦИКЛА И УСТРОЙСТВО ПЯТИТАКТНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2006 |
|
RU2326250C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ РАБОЧЕГО ЦИКЛА И УСТРОЙСТВО ПУЛЬСИРУЮЩЕГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2455507C1 |
| СПОСОБ РАБОТЫ РОТОРНО-ЛОПАСТНОЙ МАШИНЫ (ВАРИАНТЫ) И РОТОРНО-ЛОПАСТНАЯ МАШИНА | 2013 |
|
RU2587506C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2005 |
|
RU2410553C2 |
| Гибридная турбовентиляторная установка со встроенным роторным ДВС | 2020 |
|
RU2729311C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ КАШЕВАРОВА "РДК-18" И СПОСОБ ЕГО РАБОТЫ | 1997 |
|
RU2121067C1 |
| РОТОРНЫЙ КОМПРЕССОР КАШЕВАРОВА "РКК-21" | 1997 |
|
RU2131061C1 |
| РОТОРНО-ПОРШНЕВАЯ МАШИНА | 1992 |
|
RU2044893C1 |
| КУЛАЧКОВАЯ РОТОРНО-ПОРШНЕВАЯ МАШИНА | 1994 |
|
RU2072432C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2009 |
|
RU2407899C1 |

Изобретение относится к двигателестроению. Ротационное роторно-поршневое устройство содержит вал (1) отбора мощности, роторно-поршневые модули-движители (2), в циклически переменных рабочих объёмах (7) которых осуществляются термодинамические циклы двигателя внутреннего сгорания и систему циклической генерации рабочего тела. Роторно-поршневые модули-движители (2) фиксированно соединены с валом (1) отбора мощности посредством консолей (3) по схеме вал – консоль - корпус статора (4) таким образом, что в процессе рабочего цикла линия действия результирующих сил давления рабочего тела на рабочую поверхность статора (4) и рабочую внешнюю поверхность (6) ротора (8), ограничивающие рабочий объём роторно-поршневого модуля-движителя (2), перпендикулярна линии оси вала (1) отбора мощности. Также раскрыты пространственное расположение линии действия, области действия, точки приложения действия, а также радиуса и величины действия результирующих сил давления и движущей силы вращения. Технический результат заключается в увеличении крутящего момента на валу двигателя. 1 з.п. ф-лы, 6 ил.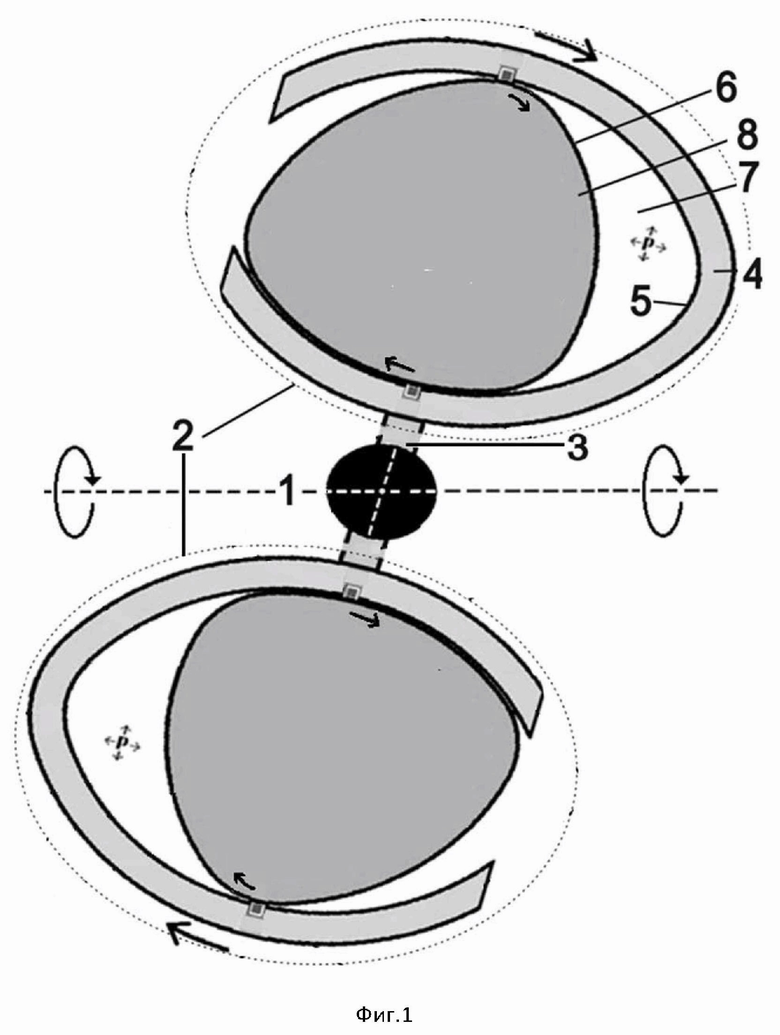
1. Ротационное роторно-поршневое устройство, включающее вал отбора мощности, роторно-поршневые модули-движители, в циклически переменных рабочих объёмах которых осуществляются термодинамические циклы двигателя внутреннего сгорания и систему циклической генерации рабочего тела, отличающееся тем, что составляющие роторно-поршневые модули-движители фиксированно соединены с валом отбора мощности посредством консолей по схеме вал – консоль - корпус статора таким образом, что в процессе рабочего цикла линия действия результирующих сил давления рабочего тела на рабочую поверхность статора и рабочую внешнюю поверхность ротора, ограничивающие рабочий объём роторно-поршневого модуля-движителя, перпендикулярна линии оси вала отбора мощности;
при этом движущая сила вращения вала отбора мощности является суммарным результатом динамического воздействия на рабочие поверхности статора и ротора и последующей обусловленной кинематикой устройства, трансформации результирующих сил давления рабочего тела;
пространственное расположение линии действия, область действия, точка приложения действия, а также радиус и величина действия результирующих сил давления и движущей силы вращения определяется геометрией линии сопряжения статора и ротора;
область действия определяется как замкнутая область на осевой плоскости, проходящей через линию оси вала отбора мощности перпендикулярно линии действия, ограниченная проекцией линии сопряжения;
точка приложения действия находится в геометрическом центре области действия;
радиус действия равен расстоянию между линией оси вала отбора мощности и точкой приложения;
величина действия сил давления рабочего тела равна величине давления в рабочем объёме, умноженной на величину площади области действия;
результирующая сила давления рабочего тела на рабочую поверхность статора действует как реактивная сила тяги и непосредственно осуществляет функцию движущей силы вращения вала отбора мощности от статора.
2. Ротационное роторно-поршневое устройство по п. 1, отличающееся тем, что автоэквидистантальными роторно-поршневыми модулями-движителями, которые
являются плоскими механизмами с плоскостями движения, перпендикулярными осевой плоскости, и включает автоэквидистантальные статор и ротор;
автоэквидистантальный статор состоит из замыкающих рабочий объём фиксированно соединённых радиальной секции статора и двух боковых секций с внутренними рабочими поверхностями боковых секций, ограничивающими, вместе с рабочими поверхностями статора и ротора, рабочий объём;
радиальная секция статора имеет форму овального полукольца с рабочей поверхностью статора, кинематически огибающей рабочую поверхность ротора в процессе позиционирования ротора относительно статора при неподвижном положении модуля;
боковые секции герметично фиксированно соединены с соответствующими боковыми стенками статора по всему периметру полукольца статора;
автоэквидистантальный ротор имеет овально-кольцеобразную форму и включает рабочую внешнюю поверхность ротора и внутреннюю опорную поверхность ротора, эквидистантные самим себе в плоскостях движения, при этом все контуры радиальных поверхностей ротора в плоскостях движения эквидистантны между собой;
в процессе позиционирования ротора относительно статора внутренние рабочие поверхности боковых секций касательно сопряжены с соответствующими боковыми поверхностями кольца ротора;
позиционирование ротора относительно статора в процессе функционирования рабочего объёма осуществляется путём механического обкатывания внутренней опорной поверхностью ротора пары свободно вращающихся опорных катков, устанавливаемых на подшипниках в боковых секциях;
линии осей вращения опорных катков располагаются в осевой плоскости;
контактное взаимодействие ротора с опорными катками и ротора со статором осуществляется по линиям пересечения, соответственно, опорных и рабочих поверхностей с осевой плоскостью;
герметичность рабочего объёма обеспечивают радиальные уплотнения, устанавливаемые в рабочей поверхности статора в местах пересечения с осевой плоскостью, и торцовые уплотнения, устанавливаемые в боковых поверхностях кольца ротора.
| Способ повышения твердости стальных и чугунных режущих пластин | 1947 |
|
SU75219A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ С ЗУБЧАТОЙ ПЕРЕДАЧЕЙ, РАБОТАЮЩЕЙ НА СЖИМАЕМОЙ СРЕДЕ | 2015 |
|
RU2643280C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2140018C1 |
| US 5393208 A1, 28.02.1995. | |||

