Изобретение относится к области гидроакустики и может использоваться в системах шумопеленгования и контроля подводной обстановки.
Известен способ обнаружения шумящих объектов в мелком и глубоком море (патент РФ №2653189, МПК G01S 3/80, G01S 15/04, опубликован 07.05.2018), включающий прием шумового сигнала векторно-скалярным приемником (ВСП), содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости, частотно-временную обработку в заданном фиксированном частотном диапазоне принятого сигнала, вычисление в каждом частотном канале, сформированном в результате частотно-временной обработки принятых шумовых сигналов, комплексных амплитуд звукового давления, трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и трех компонент мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для суммарного процесса сигнал плюс помеха и для помехи отдельно, формирование в каждом частотном канале усредненных за время T1 значений трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления, формирование в каждом частотном канале усредненных за время Т2=10 T1 комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления, нормирование всех 21 информативных параметров, вычисленных для суммарного процесса сигнал плюс помеха, на соответствующие значения информативных параметров, вычисленные для помехи, вычисление максимального отношения сигнал/помеха (с/и) для одного из 21 информативных параметров и принятие решения об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха максимального отношения сигнал/помеха, вычисленного в одном из 21 информативных параметров.
Отличительными существенными признаками этого способа являются следующие операции:
- использование в качестве приемной системы комбинированный приемник, содержащий, кроме приемника звукового давления, трехкомпонентный приемник вектора колебательной скорости;
- формирование методами частотно-временной обработки сигналов набора частотных каналов в заданном фиксированном частотном диапазоне в векторных каналах комбинированного приемника;
- вычисление в каждом частотном канале, сформированном в результате частотно-временной обработки принятых шумовых сигналов, текущих значений комплексных амплитуд трех компонент вектора колебательной скорости, текущих значений амплитуд трех компонент вещественной составляющих вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности для суммарного процесса сигнал плюс помеха;
- усреднение за заранее определенный временной интервал T1 значений трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха;
- выделение из текущих значений суммарного случайного процесса сигнал плюс помеха текущих значений помехи;
- вычисление в каждом частотном канале текущих значений комплексных амплитуд трех компонент вектора колебательной скорости, текущих значения амплитуд трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности для помехи;
- усреднение за заранее определенный временной интервал T1 значений трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для помехи;
- вычисление в каждом частотном канале за заранее определенный временной интервал Т2=10T1 текущих значений комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха;
- вычисление в каждом частотном канале за заранее определенный временной интервал Т2=10T1 текущих значений комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для помехи;
- нормирование квадрата звукового давления и компоненты комплексного вектора интенсивности, усредненные за время T1, вычисленные для суммарного процесса сигнал плюс помеха, на соответствующие значения квадрата звукового давления и компоненты комплексного вектора интенсивности, усредненные за время T1, вычисленные для помехи;
- нормирование вычисленных за время Т2=10Т1 текущих значений комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха на соответствующие текущие значения комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для помехи;
- вычисление максимального отношения с/п из набора 21 информативных параметров, 7 информативных параметров для усредненных за время T1 нормированных на помеху значений комплексного вектора интенсивности и квадрата звукового давления, и 14 информативных параметров для усредненных за время Т2=10T1, нормированных на помеху значений комплексных амплитуд нулевой и первой гармоник вторичного спектра для комплексного вектора интенсивности и квадрата звукового давления;
- в качестве модельной статистики поля помехи в скалярном канале и в каналах вектора колебательной скорости принимается гауссова статистика;
- в качестве модельной статистики поля помехи в каналах вектора интенсивности принимается статистика Лапласа;
- вычисление на основе принятых статистик аналитической зависимости вероятности правильного обнаружения от порогового отношения с/п по методу максимального правдоподобия при заданной вероятности ложной тревоги;
- принятие решение об обнаружении путем сравнения с пороговым значением отношения с/п максимального отношения с/п, вычисленного из набора 21 информативных параметров.
Для этого способа обнаружения источника шумового сигнала характерна низкая помехоустойчивость и высокая чувствительность к ложным срабатываниям из-за отсутствия достоверных данных о характеристиках помехи, на основе которых формируются пороговые уровни в устройстве обнаружения. Недостатком также является применение пороговых энергетических механизмов обнаружения, основанных на вычислении величины не всей энергии сигнала, принимаемого от источника, а лишь отдельных наиболее сильных ее спектральных составляющих.
Известен также способ обнаружения подводного источника широкополосного шума (патент РФ №2699923, МПК G01S 3/80, опубликован 11.09.2019 г. ), включающий прием широкополосного шума источника комбинированным приемником, содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости частиц среды, согласно которому выполняется частотно-временная обработка принятого сигнала в наблюдаемом диапазоне частот; вычисляются в каждом частотном канале, сформированном в результате частотно-временной обработки принятого шумового сигнала, текущие значения комплексных амплитуд звукового давления и компонент вектора колебательной скорости; для текущего временного фрагмента принятого сигнала заданной длительности вычисляются в каждом частотном канале средние величины компонент вектора плотности потока энергии; принимается решение об обнаружении источника широкополосного шума по уровню превышения величиной секторной интенсивности потока энергии доминирующего углового сектора пороговой величины, по временной устойчивости уровня превышения, а также соответствию временной изменчивости ориентации доминирующего углового сектора предполагаемой динамике движения источника, а по ориентации доминирующего сектора - о направлении на источник.
При этом отличительными существенными признаками данного способа являются следующие операции: для принятого сигнала методами частотно-временной обработки формируется набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон; для текущего временного фрагмента принятого сигнала заданной длительности:
- вычисляется в каждом частотном канале средние величины трех компонент вектора плотности потока энергии;
- вычисляются в каждом частотном канале горизонтальный угол прихода потока энергии;
- вычисляется в каждом частотном канале энергетическая характеристика среднего потока акустической энергии (величина интенсивности потока);
- устанавливают равные горизонтальные угловые сектора, охватывающие весь горизонт наблюдения 0-360 град;
- вычисляется для каждого выделенного углового сектора величина секторной интенсивности потока энергии;
- вычисляется величина средней секторной интенсивности потока энергии и определяют ее пороговой величиной для секторов;
- выделяется из установленных угловых секторов секторы, в которых величина секторной интенсивности потока энергии превышает пороговую энергию;
- формируется «мгновенное» угловое распределение величины секторной интенсивности потока энергии выделенных угловых секторов;
- выполняется описанный выше цикл обработки текущего временного фрагмента принятого сигнала и для последующих временных фрагментов той же длительности, но сдвинутых относительно предыдущего на фиксированный интервал времени;
- формируется из параметров «мгновенных» угловых распределений величины секторной интенсивности потока энергии выделенных угловых секторов, вычисленных в циклах обработки временных фрагментов принятого сигнала, сонограмма время-угол прихода потока энергии шумового сигнала в горизонтальной плоскости;
- определяется из сонограммы время-угол прихода потока энергии доминирующий угловой сектор с максимальной величиной секторной интенсивности потока энергии и проводится оценка временной устойчивости величины последней;
- анализируются данные текущей сонограммы время-угол прихода потока энергии, и принимается решение об обнаружении источника широкополосного шума.
Для данного способа характерна малая помехоустойчивость и небольшая дальность обнаружения подводного источника широкополосного шума вследствие энергетического сложения интенсивности потока энергии, а также невозможность реализации способа, когда сонограмма время-угол прихода потока энергии зашумлена. Данный способ является наиболее близким к заявленному изобретению и принят за прототип.
Задачей заявленного способа является повышение помехоустойчивости приемной системы и дальности обнаружения подводного малошумного источника звука на основе голографической обработки шумоизлучения источника.
Технический результат заключается в повышение помехоустойчивости приемной системы и увеличении дальности обнаружения подводного малошумного источника звука.
Для решения поставленной задачи в заявленный способ обнаружения подводного малошумного источника звука, включающий прием шумового сигнала ВСП, введены операции для голографической обработки принятого шумового сигнала в наблюдаемом диапазоне частот для заданного временного интервала и по всем каналам ВСП, на основе которой принимается решение об обнаружении источника. Возможность применения голографической обработки основана на том, что в океанической среде волноводная дисперсия и многомодовое распространение звука приводят к формированию устойчивой интерференционной картины (интерферограммы) шумового поля источника. Под интерферограммой понимается спектральная плотность энергетического параметра звукового поля, например, квадрата давления или компонент вектора интенсивности, в переменных частота-время. Конфигурация локализованных полос интерферограммы определяется параметрами волновода, скоростью и траекторией шумового источника. Голографическая обработка шумового поля источника реализует квазикогерентное накопление спектральной интенсивности вдоль локализованных полос, к которой далее применяется двумерное преобразование Фурье. На выходе интегрального преобразования (голограммы) спектральная плотность звукового поля концентрируется в малой области в форме фокальных пятен, обусловленных интерференцией мод различных номеров. На голограмме записывается амплитудно-фазовое распределение интерферограммы за время наблюдения в рассматриваемом диапазоне частот и содержится информация об удаленности и радиальной скорости (проекции скорости по направлению к приемной системе) источника. Накопление помехи вдоль полос интерферограммы некогерентно и помеха распределена по всей области голограммы. В качестве способа обнаружения шумового источника принимается условие, при котором максимум функции углового распределения спектральной плотности голограммы (функции обнаружения) в два раза и более превышает помеховые пики. Угловое распределение спектральной плотности определяется как сумма спектральных плотностей вдоль прямых, проходящих через начало координат в первом и четвертом квадрантах голограммы. Физические принципы заявленного способа обнаружения подводного малошумного источника звука изложены, например, в работах: Кузнецов Г.Н., Кузькин В.М., Пересёлков С.А. Спектрограмма и локализация источника звука в мелком море // Акуст. журн. 2017. Т. 63. №4. С. 406-418; Казначеев И.В., Кузнецов Г.Н., Кузькин В.М., Пересёлков С.А. Интерферометрический метод обнаружения движущегося источника звука векторно-скалярным приемником // Акуст. журн. 2018. Т. 64. №1. С. 33-45; Казначеева Е.С., Кузькин В.М., Матвиенко Ю.В., Пересёлков С.А., Хворостов Ю.А. Оценка дальности обнаружения малогабаритного подводного аппарата по его шумовому полю // Подводные исследования и робототехника. 2021. №4 (38). С. 88-93.
Технический результат достигается тем, что в способе обнаружения подводного источника широкополосного шума, включающем использование в качестве приемной системы ВСП, содержащего канал звукового давления и три канала вектора колебательной скорости; формирование для принятого сигнала методами частотно-временной обработки сигналов набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон; вычисление в каждом частотном канале, сформированном в результате частотно-временной обработки принятых шумовых сигналов, текущих значений комплексных амплитуд звукового давления и трех компонент колебательной скорости и энергетических параметров звукового поля на их основе; принятие решения об обнаружении и о направлении движения источника; согласно изобретению:
- при приеме сигнала формируется буферный блок данных длительностью Δt, который составлен из J равных интервалов длительностью Δt/J,включающих интервал временного сдвига δt2;
- в каждом частотном канале шириной Δƒi для каждого временного интервала длительностью δt1=(Δt/J-δt2) выполняется частотно-временная обработка принятого шумового сигнала с шагом по частоте δƒ=1/δt1 и определяются текущие значения комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости, по значениям давления и колебательной скорости частиц среды определяются энергетические параметры звукового поля;
- формируется массив значений энергетических параметров в каждом частотном канале - интерферограммы;
- выполняется двумерное преобразование Фурье сформированного массива интерферограмм по наблюдаемому диапазону частот и в течение времени накопления Δt по созданию голограмм шумового поля, в которых спектральная плотность энергии источника локализована в форме фокальных пятен;
- в полученных голограммах с равномерным шагом вычисляются угловые распределения спектральной плотности голограмм - функций обнаружения;
- выполняется нормировка функций обнаружения на максимальное значение пика и выделяются нормированные функции обнаружения, в которых помеховые пики не превышают назначенный порог (уровень порога выбирается в диапазоне 0.4-0.7);
- выполняется описанный выше цикл обработки текущего временного интервала наблюдения принятого сигнала и для последующих временных интервалов той же длительности, но сдвинутых относительно предыдущего на фиксированный интервал времени;
- формируются из текущих нормированных функций обнаружения, вычисленных в циклах обработки временных интервалов наблюдения принятого сигнала, временные зависимости угловых координат пиков нормированных функций обнаружения и на основании устойчивости динамики их изменения во времени принимается решение об обнаружении источника, а по угловому положению определяется направление движения (приближение или удаление от приемной системы).
Именно такая совокупность существенных признаков заявленного способа позволяет с помощью ВСП осуществлять частотно-временную фильтрацию шумоизлучения источника, квазикогерентно накапливать спектральную плотность интерферограмм и концентрировать ее на голограмме во всем наблюдаемом частотном диапазоне. Фактически предложенная обработка обеспечивает приятие решения об обнаружении фокусировкой энергии источника, накопленной за определенное время по всей наблюдаемой полосе шумоизлучения, что повышает помехоустойчивость, дальность и эффективность работы приемной системы.
Новизна заявленного способа обнаружения подводного малошумного источника звука заключается в использовании методов голографической обработки, обеспечивающих принятие решения об обнаружении по пиковому значению энергии сигнала во всем наблюдаемом частотном диапазоне за определенное время наблюдения.
Основное преимущество предлагаемого способа перед способом-прототипом состоит в том, что обнаружение подводного малошумного источника звука становится возможным при зашумленной (не наблюдаемой) интерферограмме. Кроме того, способ обнаружения источника не требует знания о характере сигнала, помехи и передаточной функции.
Блок-схема, поясняющая заявленный способ обнаружения подводного источника широкополосного шума приведена на фиг. 1, где обозначены следующие элементы:
1 - приемная система с ВСП;
2 - блок буферной памяти для накопления текущих данных;
3 - блок расчета спектральных характеристик принятого сигнала (быстрое преобразование Фурье);
4 - блок расчета интерферограмм в каждом частотном канале;
5 - блок расчета голограмм на основе двумерного Фурье-преобразования интерферограмм в каждом частотном канале;
6 - блок формирования нормированных функций обнаружения в каждом частотном канале и выделение нормированных функций обнаружения с одиночным пиком, превышающим помеховые пики по назначаемому порогу;
7 - блок принятия решения.
Заявленный способ обнаружения подводного источника широкополосного шума осуществляется следующей последовательностью действий.
Приемная система 1.
Акустический сигнал от широкополосного шумового источника принимается ВСП 1, с выхода которого принятый сигнал звукового давления акустического поля P(t) и трехортогональных компонент вектора колебательной скорости частиц водной среды в локальной системе координат ВСП Vx(t), Vy(t), Vz(t) (две первые компоненты составляют горизонтальную плоскость) поступает в блок 2.
Блок 2.
В блоке накапливаются текущие данные на интервале времени Δt.
Блок 3.
Для принятого сигнала длительности δt1 (например, δt1=1.5 с) методами частотно-временной обработки сигналов формируется набор частотных каналов Δƒi, охватывающий весь наблюдаемый частотный диапазон Δƒ, с шириной полосы каналов (например, Δƒi=100 Гц) и средними частотами спектра ƒi. С шагом дискретизации δƒ=1/δt1 в каждом частотном канале вычисляются комплексные значения амплитуд звукового давления Р(ƒ, t) и трех компонент вектора колебательной скорости Vx(ƒ, t), Vy(ƒ, t), Vz(ƒ, t), которые приводятся к эквивалентным единицам звукового давления.
Блок 4.
В каждом частотном канале устанавливается текущее время накопления Δt (например, Δt=60 с) шумовых реализаций длительностью δt1 и по каждой шумовой реализации вычисляются интерферограммы (энергетические параметры), например:
где  Результаты проведенных численных и натурных экспериментов в мелководных акваториях показали, что в условиях изотропной помехи энергетические параметры
Результаты проведенных численных и натурных экспериментов в мелководных акваториях показали, что в условиях изотропной помехи энергетические параметры 
 которые формируются на выходе ВСП, дают выигрыш в отношении с/п на 3-7 дБ по сравнению с обычным приемником давления IP(ƒ, t). Согласно результатам численных и натурных экспериментов сформированные за время наблюдения Δt нормированные интерферограммы
которые формируются на выходе ВСП, дают выигрыш в отношении с/п на 3-7 дБ по сравнению с обычным приемником давления IP(ƒ, t). Согласно результатам численных и натурных экспериментов сформированные за время наблюдения Δt нормированные интерферограммы 
 а также сформированные по потоку мощности практически идентичны. Из сформированных интерферограмм отфильтровываются средние значения.
а также сформированные по потоку мощности практически идентичны. Из сформированных интерферограмм отфильтровываются средние значения.
Блок 5.
В каждом частотном диапазоне к сформированным за время Δt к интерферограммам 
 применяется двумерное преобразование Фурье, т.е. реализуются голограммы вида:
применяется двумерное преобразование Фурье, т.е. реализуются голограммы вида:
где I(ƒ, t) - одна из интерферограмм 
 ƒ1,2=fi±(Δƒ/2), τ и ν - время и частота голограммы. Спектральная плотность шумоизлучения источника в форме фокальных пятен расположена в первом и третьем квадрантах, если источник приближается к приемной системе (радиальная скорость отрицательная) и расположена во втором и четвертом квадрантах, если источник удаляется от приемной системы (радиальная скорость положительная). На голограмме FI (τ, ν) записывается интерферограмма во всех промежуточных состояниях, которые источник последовательно проходит за время наблюдения.
ƒ1,2=fi±(Δƒ/2), τ и ν - время и частота голограммы. Спектральная плотность шумоизлучения источника в форме фокальных пятен расположена в первом и третьем квадрантах, если источник приближается к приемной системе (радиальная скорость отрицательная) и расположена во втором и четвертом квадрантах, если источник удаляется от приемной системы (радиальная скорость положительная). На голограмме FI (τ, ν) записывается интерферограмма во всех промежуточных состояниях, которые источник последовательно проходит за время наблюдения.
Блок 6.
В каждом частотном диапазоне для первого и четвертого квадрантов созданных голограмм вычисляется функция обнаружения
и нормируется на максимальное значение. Здесь Δτ - линейный размер области локализации спектральной плотности сигнала по оси времени τ; ε - угловой коэффициент линейной зависимости ν=ετ, τ≥0. Если положение максимума функции обнаружения εm>0, то источник приближается к приемной системе; если εm<0 - источник удаляется от приемной системы; если εm=0 - источник неподвижен или радиальная скорость равна нулю (движение источника по окружности). Выделяются вычисленные нормированные функции обнаружения, и устанавливается критерий обнаружения источника, согласно которому доминирующим принимается одиночный пик со значением равным единице, а остальные пики (помеховые) не превышают значение 0.5.
Блок 7.
Анализируются нормированные функции обнаружения, проводится оценка их устойчивости для разных диапазонов частот и каналов обработки, принимается решение об обнаружении подводного малошумного источника звука на основании:
- наличия единичного доминирующего пика нормированной функции обнаружения;
- не превышения помеховыми пиками пороговой величины, равной 0.5.
Достоверность предлагаемого способа обнаружения подводного малошумного источника звука подтверждается результатами проведенных численных и натурных экспериментов в мелководных акваториях в низкочастотном и высокочастотном диапазонах для различных каналов обработки ВСП. Ниже приведены примеры.
Пример 1.
Численный эксперимент.
Условия заданы в следующем виде. Горизонтально-однородный волновод, глубина H=60 м, скорость звука с=1480 м/с. Параметры дна: отношение плотности грунта и воды ρ=1.8, комплексный показатель преломления n=0.88(1+i0.013). Неподвижный малошумный источник звука расположен на глубине zs=30 м, глубина приемной системы zq=50 м. Полоса Δƒ=300-350 Гц. В полосе 300-350 Гц средняя мощность: шумоизлучения источника на расстоянии  шума фона моря
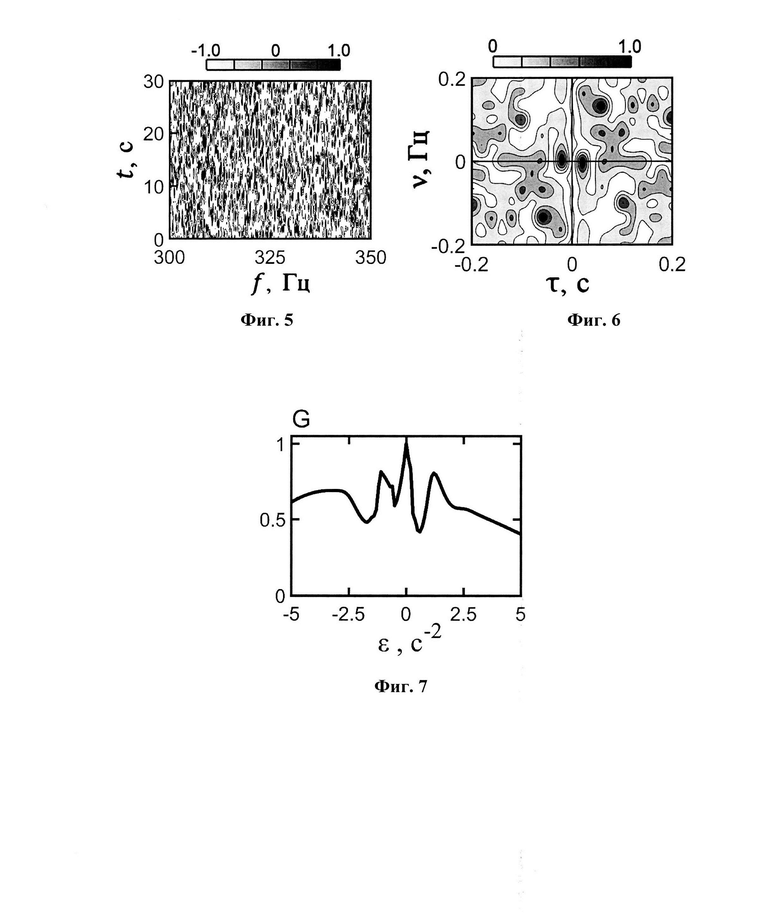
шума фона моря  Время наблюдения Δt=30 с, длительность шумовой реализации Δt1=1.5 с, временной интервал между ними δt2=0.5 с, число временных интервалов J=15. Сигнал принимался на скалярный канал ВСП. Результаты обнаружения источника приведены на фиг. 2-7. На фиг. 2, 5 наблюдаются зашумленные интерферограммы, интерференционные полосы не видны. На голограмме для расстояния r=11.0 км (фиг. 3) имеет место структурированная картина фокальных пятен, расположенных на оси времени для неподвижного источника, которая становится хаотической при расстоянии r=11.5 км (фиг. 6). На фиг. 4, 7 представлены нормированные функции обнаружения для расстояний r=11.0 км и 11.5 км соответственно. На фиг. 4 преобладает одиночный пик, расположенный в точке ε=0. На фиг. 7 имеет место совокупность пиков, сопоставимых по амплитуде. Согласно критерию обнаружения, источник на расстоянии r=11.0 км обнаруживается, а на расстоянии r=11.5 км - не обнаруживается.
Время наблюдения Δt=30 с, длительность шумовой реализации Δt1=1.5 с, временной интервал между ними δt2=0.5 с, число временных интервалов J=15. Сигнал принимался на скалярный канал ВСП. Результаты обнаружения источника приведены на фиг. 2-7. На фиг. 2, 5 наблюдаются зашумленные интерферограммы, интерференционные полосы не видны. На голограмме для расстояния r=11.0 км (фиг. 3) имеет место структурированная картина фокальных пятен, расположенных на оси времени для неподвижного источника, которая становится хаотической при расстоянии r=11.5 км (фиг. 6). На фиг. 4, 7 представлены нормированные функции обнаружения для расстояний r=11.0 км и 11.5 км соответственно. На фиг. 4 преобладает одиночный пик, расположенный в точке ε=0. На фиг. 7 имеет место совокупность пиков, сопоставимых по амплитуде. Согласно критерию обнаружения, источник на расстоянии r=11.0 км обнаруживается, а на расстоянии r=11.5 км - не обнаруживается.
Пример 2.
Натурный эксперимент.
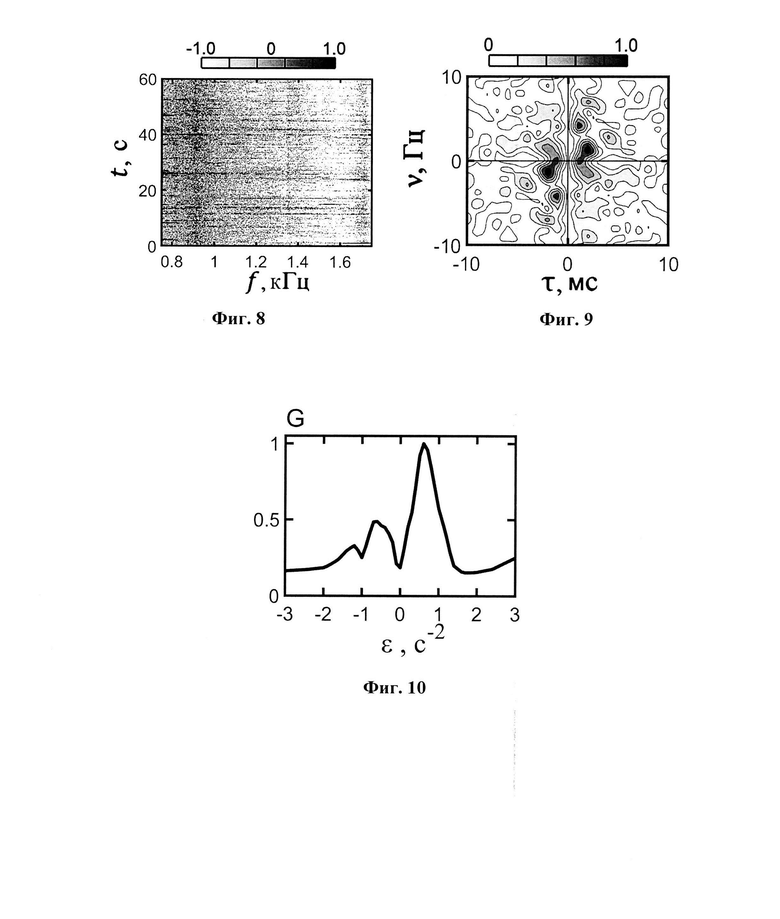
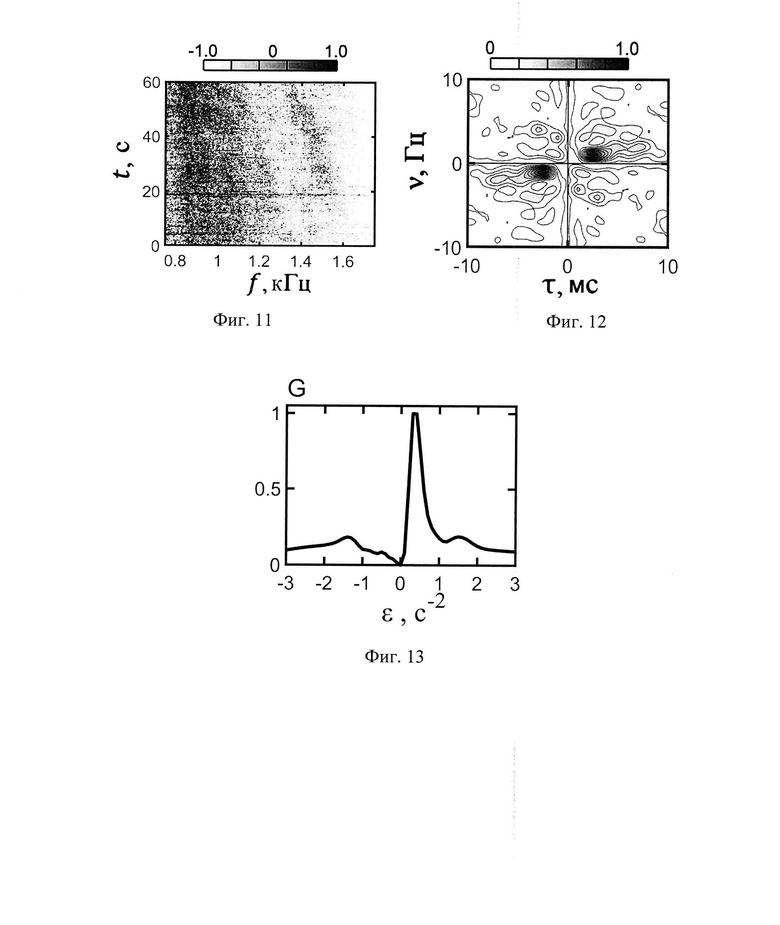
Условия эксперимента заданы следующими параметрами. Глубина акватории Н=8-10 м. Скорость малошумного источника звука w=1.5 м/с, глубина погружения zs=4 м. Приемная система, состоящая из одиночного ВСП, располагалась на дне. Параметры обработки экспериментальных данных: время наблюдения Δt=60 с, длительность шумовой реализации δt1=1.5 с, временной интервал между ними δt2=0.5 с, число временных интервалов J=30. Частотный диапазон ƒ=0.75-1.75 кГц, ширина полосы Δƒ=1 кГц. Источник приближался к ВСП, в начальный момент времени t=0 эксперимента расстояние между ними r=1.5 км. Результаты обработки на основе предлагаемого способа обнаружения источника звука за время наблюдения Δt=60 с на расстоянии r=1.5 км приведены на фиг. 8-13. На фиг. 8-10 и фиг. 11-13 представлены результаты обработки интерферограмм Ip (ƒ, t) и  По выделенным двум каналам ВСП малошумный источник звука уверенно обнаруживается на предельном расстоянии от приемной системы. При обработке по скалярному каналу интерференционные полосы малозаметны (фиг. 8), при обработке по векторному каналу интерференционные полосы начинают существенно проявляться (фиг. 11). Фокальные пятна расположены в первом и третьем квадрантах голограммы (фиг. 9, 12), максимум нормированной функции обнаружения расположен в области положительных значений углового коэффициента (фиг. 10, 13), что свидетельствует о приближении источника к приемнику. Из сравнения фиг. 8-10 и фиг. 11-13 следует, что обработка принятого шумового сигнала по векторному каналу, по сравнению со скалярным каналом, позволяет повысить эффективность обнаружения малошумного источника.
По выделенным двум каналам ВСП малошумный источник звука уверенно обнаруживается на предельном расстоянии от приемной системы. При обработке по скалярному каналу интерференционные полосы малозаметны (фиг. 8), при обработке по векторному каналу интерференционные полосы начинают существенно проявляться (фиг. 11). Фокальные пятна расположены в первом и третьем квадрантах голограммы (фиг. 9, 12), максимум нормированной функции обнаружения расположен в области положительных значений углового коэффициента (фиг. 10, 13), что свидетельствует о приближении источника к приемнику. Из сравнения фиг. 8-10 и фиг. 11-13 следует, что обработка принятого шумового сигнала по векторному каналу, по сравнению со скалярным каналом, позволяет повысить эффективность обнаружения малошумного источника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2699923C1 |
| Способ обнаружения шумящих, движущихся в море объектов | 2017 |
|
RU2653585C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |
| Способ обнаружения шумящих объектов в мелком и глубоком море | 2019 |
|
RU2702917C1 |
| Способ обнаружения шумящих объектов в мелком море | 2019 |
|
RU2700797C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ В МЕЛКОМ И ГЛУБОКОМ МОРЕ | 2017 |
|
RU2653189C1 |
| Способ обнаружения шумящих объектов в мелком море в инфразвуковом диапазоне частот | 2022 |
|
RU2794716C1 |
| Пеленгатор низкочастотных шумовых сигналов для мобильных систем обнаружения малошумных подводных объектов | 2023 |
|
RU2811513C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
Использование: гидроакустика, в системах шумопеленгования и контроля подводной обстановки, обеспечивающего обнаружение и локализацию подводных аппаратов по шумоизлучению. Сущность: в океанической среде волноводная дисперсия и многомодовое распространение звука приводят к формированию устойчивой интерференционной картине (интерферограмме) шумового поля источника. Конфигурация локализованных полос интерферограммы определяется параметрами волновода, скоростью и траекторией шумового источника. Голографическая обработка шумового поля источника реализует квазикогерентное накопление спектральной интенсивности вдоль локализованных полос, к которой далее применяется двумерное преобразование Фурье. На выходе интегрального преобразования (голограммы) спектральная плотность звукового поля концентрируется в малой области в форме фокальных пятен, обусловленных интерференцией мод различных номеров. На голограмме записывается амплитудно-фазовое распределение интерферограммы за время наблюдения в рассматриваемом диапазоне частот и содержится информация об удаленности и радиальной скорости (проекции скорости по направлению к приемной системе) источника. Накопление помехи вдоль полос интерферограммы некогерентно, и помеха распределена по всей области голограммы. В качестве способа обнаружения шумового источника принимается условие, при котором максимум функции углового распределения спектральной плотности голограммы (функции обнаружения) в два раза и более превышает помеховые пики. Угловое распределение спектральной плотности определяется как сумма спектральных плотностей вдоль прямых, проходящих через начало координат в первом и четвертом квадрантах голограммы. Способ обнаружения источника не требует знания о характере сигнала, помехи и передаточной функции. Способ включает в себя формирование на выходе приемной системы интерферограмм принятого сигнала по частотным каналам ВСП, охватывающих весь наблюдаемый частотный диапазон. Для каждого частотного диапазона формируется интерферограмма в переменных частота-время принятого сигнала по каналам ВСП. Проводится запись голограммы в переменных время-частота. По сформированным голограммам вычисляются функции обнаружения. На основе анализа функций обнаружения принимается решение об обнаружении источника по каждому из частотных диапазонов и каналов ВСП. Технический результат: повышение помехоустойчивости приемной системы с применением одиночного векторно-скалярного приемника (ВСП), содержащего канал звукового давления и три канала вектора колебательной скорости, и увеличение дальности обнаружения источника шума на основе голографической обработки шумового сигнала на векторно-скалярных каналах приемной системы. 13 ил.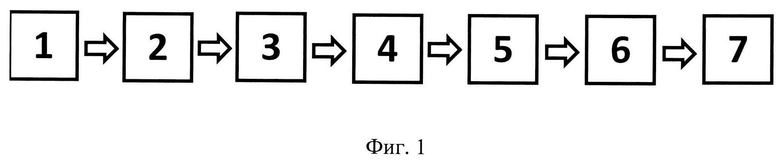
Способ обнаружения подводного источника широкополосного шума, включающий прием шумового сигнала векторно-скалярным приемником, содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости, выполнение частотно-временной обработки принятого сигнала в наблюдаемом диапазоне частот, вычисление в каждом частотном канале, сформированном в результате частотно-временной обработки принятого шумового сигнала, текущих значений комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости, принятие решения об обнаружении источника и направлении его движения, отличающийся тем, что при приеме сигнала формируется буферный блок данных длительностью Δt, который составлен из J равных интервалов длительностью Δt/J, включающих интервал временного сдвига δt2; в каждом частотном канале шириной Δƒi для каждого временного интервала длительностью δt1=(Δt/J-δt2) выполняется частотно-временная обработка принятого шумового сигнала с шагом по частоте δƒ=1/δt1 и определяются текущие значения комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости, по значениям давления и колебательной скорости частиц среды определяются энергетические параметры звукового поля; формируется массив значений энергетических параметров в каждом частотном канале; выполняется двумерное преобразование Фурье созданных интерферограмм по наблюдаемому диапазону частот и в течение времени накопления Δt буферных данных с формированием голограмм шумового поля источника; в полученных голограммах вычисляются функции обнаружения путем построения с равномерным шагом угловых распределений спектральной плотности голограмм; выполняется нормировка функций обнаружения на максимальное значение и выделяются нормированные функции обнаружения, в которых помеховые пики не превышают назначенный порог; описанный выше цикл обработки сформированного блока буферных данных повторяется для последующих временных интервалов той же длительности, сдвинутых относительно предыдущего на фиксированный интервал времени; из текущих нормированных функций обнаружения, вычисленных в циклах обработки временных интервалов наблюдения принятого сигнала, формируются временные зависимости угловых координат пиков нормированных функций обнаружения, решение об обнаружении источника принимается на основании устойчивости динамики их изменения во времени, а по угловому положению определяется направление движения.
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2699923C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ В МЕЛКОМ И ГЛУБОКОМ МОРЕ | 2017 |
|
RU2653189C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| В.М | |||
| Кузькин и др | |||
| "ИНТЕРФЕРОМЕТРИЧЕСКАЯ ОБРАБОТКА С ИСПОЛЬЗОВАНИЕМ ВЕРТИКАЛЬНОЙ ЛИНЕЙНОЙ АНТЕННЫ" | |||
| ВЕСТНИК ВГУ | |||
| СЕРИЯ: ФИЗИКА | |||
| МАТЕМАТИКА | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 5831936 A, 03.11.1998 | |||
| CN 107132503 A, 05.09.2017. | |||

