Изобретение относится к области гидроакустических пассивных систем определения положения подводных шумящих объектов и, в частности, к области приемных антенн, определяющих направление на источник шумового сигнала.
При характеристике разработанного технического решения в дальнейшем будут использованы следующие термины и понятия:
- комбинированный векторно-скалярный приемник звука - сущность и конструкция раскрыты в RU, патент 2679931;
- приемник звукового давления - сущность и конструкция раскрыты в таких источниках, как SU, авторские свидетельства 198794 и 1534760;
- трехкомпонентный приемник колебательной скорости - сущность и конструкция раскрыты в журнале «Подводные исследования и робототехника». 2012. №2(14) стр. 4-12. В.А. Щуров и др. «Мобильные акустические комбинированные приемные системы на основе автономных необитаемых подводных аппаратов».
Известны пассивные системы обнаружения источника низкочастотного шумового поля и определения направления на него (пеленга), состоящие из многоэлементных линейных или пространственных приемных антенн, выполняющих обработку путем согласованной фильтрации и когерентного суммирования сигналов на элементах антенны. Характеристики таких систем определяются в основном характеристиками приемных антенн, в частности угловое разрешение определяется волновым размером антенны. Так, например, для шумового сигнала со средней частотой 100 Гц, оценка размера приемной линейной антенны, обеспечивающей угловое разрешение 5°, составляет 10 длин волн или 150 м (Бурдик B.C. Анализ гидроакустических систем - Судостроение Л., 1988 - 392 с.).
Приемные антенны таких размеров не могут быть установлены на мобильных пассивных системах обнаружения, например, на автономных необитаемых подводных аппаратах или глайдерах.
Известны системы пеленгования низкочастотного шума, в которых в качестве приемной антенны применяют векторные приемники колебательной скорости. При малых габаритах (значительно меньше длины волны средней частоты принимаемого шума) они могут обеспечивать угловое разрешение в несколько градусов и при этом сохраняют направленные свойства в широком низкочастотном диапазоне. Векторный приемник колебательной скорости имеет три ортогональных пространственных канала, ориентированных в рабочей среде так, что один канал служит для измерения вертикальной компоненты, а два других - для измерения горизонтальных компонент вектора колебательной скорости. Приемник изготавливают и градуируют так, чтобы выходы горизонтальных компонент скорости vx и vy были пропорциональны синусу и косинусу направления на источник сигнала соответственно. (Скребнев Г.К. Комбинированные гидроакустические приемники. СПб: Элмор, 1997 г., 200 с.). Такая приемная антенна определяет пеленг β из выражения

Однако для слабых сигналов в присутствии шумовых помех точность и помехоустойчивость такого пеленгатора оказывается очень низкой и на практике такие системы не применяют.
Известны системы (например RU, патент 2715431, опубл. 28.02.2020; RU, патент 2699923, опубл. 21.12.2020; RU, патент 2739000, опубл. 11.09.2019), в которых для пеленгования источника низкочастотных шумовых сигналов в качестве приемной антенны используются комбинированные векторно-скалярные приемники звука, объединяющие приемник звукового давления р и приемник колебательной скорости. Для увеличения помехоустойчивости при определении пеленга в системе выполняют предварительную обработку измеряемых данных давления и скорости с расчетом и осреднением горизонтальных компонент вектора интенсивности

Осреднение обеспечивает подавление изотропной помехи, а пеленг рассчитывают из выражения

Такой пеленгатор при отношении сигнал/помеха 20дБ потенциально может обеспечить угловое разрешение при определении направления на источник шума около 5°, но его основным недостатком является значительная зависимость точности от текущего значения угла пеленга (направления на объект относительно оси Y). Большая ошибка формируется приемной антенной при приеме сигнала в угловых секторах, центры которых совпадают с направлением ортогональных горизонтальных осей приемника за счет большой ошибки измерения уровня полезного сигнала в одном из каналов приемника. Так, например, если принимается шумовой сигнал с отношением сигнал/помеха 20 дБ, то при значении пеленга 1°, в канале Y уровень сигнала за счет направленности vy ≈ cos β оказывается максимальным, а в канале X уровень сигнала за счет направленности vx ≈ sin β оказывается очень слабым (меньше на 35 дБ), полностью подавляется некомпенсированной помехой и вычисление пеленга по формуле (2) выполняется с большой ошибкой. Фактически в этом пеленгаторе формируются слепые угловые зоны, где ошибка измерения пеленга очень велика. Ширина этих зон определяется отношением сигнал/помеха. При отношении сигнал/помеха 20 дБ ширина слепой зоны будет не менее ±6° (sin β≥0,1), а при 10 дБ ширина этой зоны будет уже не менее ±17° (sin β≥0,31).
Техническая проблема, которая решается настоящим изобретением, состоит в создании пеленгатора низкочастотных шумовых сигналов, обеспечивающего высокую точность пеленгования во всем диапазоне горизонтальных углов (0-360°).
Технический результат, получаемый при реализации изобретения, состоит в создании компактной антенны для определения положения подводного шумящего объекта на основе комбинированного векторно-скалярного приемника звука для применения в мобильных системах контроля подводной обстановки, например, при размещении пеленгатора на борту автономных необитаемых подводных аппаратов или глайдеров.
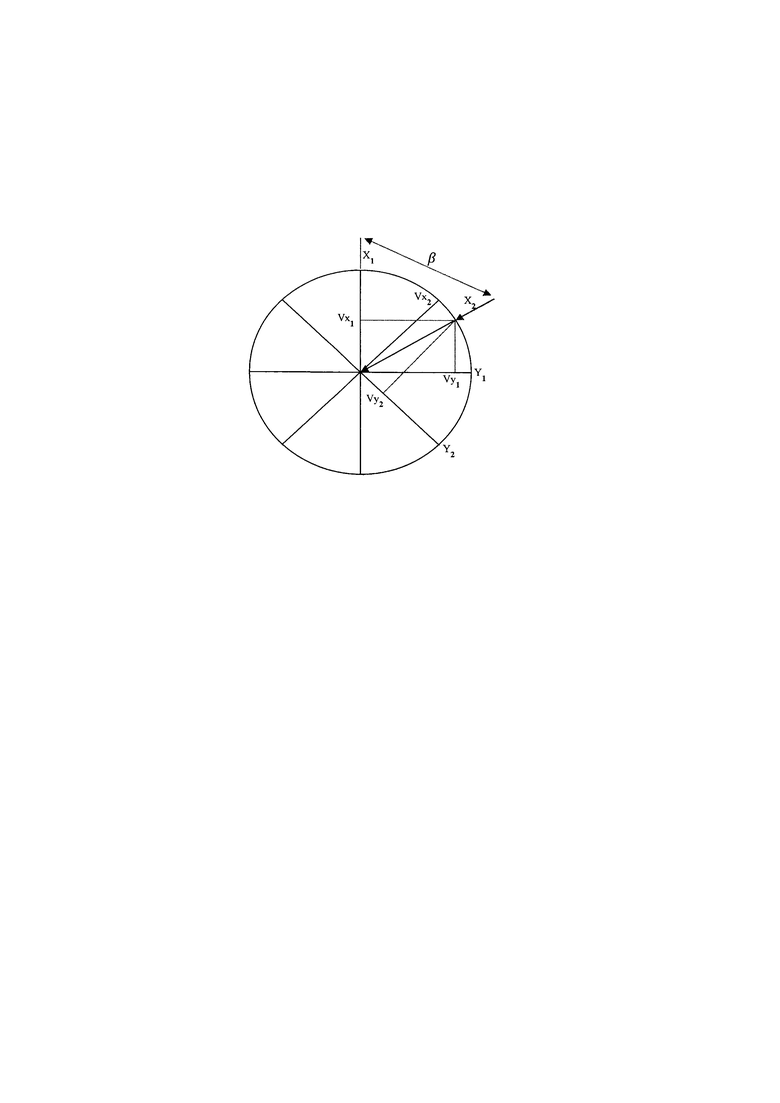
Указанный технический результат достигается тем, что в пеленгатор низкочастотных шумовых сигналов для мобильных систем обнаружения малошумных подводных объектов, содержащий в качестве приемной антенны комбинированный векторно-скалярный приемник звука, состоящий из приемника звукового давления и трехкомпонентного приемника колебательной скорости с общим фазовым центром, измеряющих акустическое давление p и компоненты вектора колебательной скорости в горизонтальной плоскости vxl и vy1, и выполняющего расчет и осреднение компонент вектора интенсивности  в комбинированный приемник введена вторая пара ортогональных горизонтальных приемных каналов геометрически повернутых относительно первой пары на угол 45° и измеряющих компоненты вектора колебательной скорости в горизонтальной плоскости vx2 и vy2, с выполнением расчета и осреднения горизонтальных компонент вектора интенсивности
в комбинированный приемник введена вторая пара ортогональных горизонтальных приемных каналов геометрически повернутых относительно первой пары на угол 45° и измеряющих компоненты вектора колебательной скорости в горизонтальной плоскости vx2 и vy2, с выполнением расчета и осреднения горизонтальных компонент вектора интенсивности 
По расчетным значениям компонент вектора интенсивности текущее значение пеленга β определяется из решения уравнения

Сущность изобретения поясняется чертежом, на котором представлена модель приема сигнала пеленгатором, содержащим четыре попарно ортогональных канала для определения горизонтальных компонент вектора колебательной скорости. Пеленгатор работает следующим образом.
Выходные сигналы в каналах измерения компонент колебательной скорости пропорциональны

а пеленг определяется из условия максимального соответствия компонент принимаемого сигнала, представленного осредненными значениями компонент вектора интенсивности, аналитическим зависимостям этих компонент, полученных с учетом (4). Минимизация ошибки измерений методом наименьших квадратов, обеспечивается выполнением условия

где А - нормирующий коэффициент, пропорциональный модулю вектора интенсивности.
Дифференцируя (5) по параметру β получим уравнение пеленга в виде (3). В уравнении (3) пеленг определяется в результате совместной обработки данных, полученных в обеих парах горизонтальных каналов и взятых с различными весовыми коэффициентами. Расширение объема данных  и наличие взвешивающих коэффициентов
и наличие взвешивающих коэффициентов  равных производным соответствующих данных по измеряемому параметру, обеспечивают преобладание в уравнении (3) составляющих, имеющих максимальные весовые коэффициенты.
равных производным соответствующих данных по измеряемому параметру, обеспечивают преобладание в уравнении (3) составляющих, имеющих максимальные весовые коэффициенты.
Погрешность, формирующаяся при неточном измерении компонент вектора интенсивности при обработке данных в различных парах горизонтальных каналов, можно после соответствующих преобразований получить в виде


где
 - относительные ошибки измерения интенсивности в каналах приемника.
- относительные ошибки измерения интенсивности в каналах приемника.
При расчете пеленга по данным первой пары каналов Х1 и Y1 минимальная ошибка формируется при значениях пеленга, где компоненты скорости равны. Например, если принимается шумовой сигнал соотношением сигнал/помеха 20 дБ (при таком отношении относительная ошибка измерения интенсивности в канале с максимальным уровнем составит 0,1), из (6) при β=45° получим σβ=0,1=5,7°. Однако при значении пеленга, совпадающем с направлением осей приемника, ошибка оказывается неприемлемой. Например, при β=0°, в канале Y1 уровень сигнала за счет направленности  " оказывается максимальным (относительная ошибка измерения интенсивности в канале составит 0,1), а в канале X1 уровень сигнала за счет направленности
" оказывается максимальным (относительная ошибка измерения интенсивности в канале составит 0,1), а в канале X1 уровень сигнала за счет направленности  и будет сравним с действующей помехой и относительная ошибка измерения интенсивности в канале X1 составит 1. Тогда из (6) получим σβ=57°.
и будет сравним с действующей помехой и относительная ошибка измерения интенсивности в канале X1 составит 1. Тогда из (6) получим σβ=57°.
При том же значении пеленга 0° обработкой данных в каналах Х2 и Y2 оценку ошибки получим из выражения (7)
с учетом равенства компонент скорости

Фактически, введение дополнительной пары горизонтальных каналов, повернутых на 45° относительно первой пары, обеспечивает устранение слепых зон измерения пеленга для сигналов в присутствии помехи по угловым секторам в направлениях ортогональных осей первой пары.
Сопоставительный анализ предлагаемого устройства с прототипом показывает, что устройство отличается наличием новых признаков.
Признак «...в комбинированный приемник введена вторая пара ортогональных приемных каналов, геометрически повернутых относительно первой пары на угол 45° и измеряющего компоненты вектора колебательной скорости в горизонтальной плоскости vx2 и vy2, с выполнением расчет осреднения горизонтальных компонент вектора интенсивности  » - служит для увеличения объема независимых данных и обеспечивает дополнительные измерения компонент колебательной скорости в приемной антенне пеленгатора.
» - служит для увеличения объема независимых данных и обеспечивает дополнительные измерения компонент колебательной скорости в приемной антенне пеленгатора.
Признак «…по расчетным значениям компонент вектора интенсивности текущее значение пеленга β определяется из решения уравнения

обеспечивает взвешенную попарную обработку при расчете пеленга с использованием измеренных компонент вектора интенсивности с наибольшим уровнем и соответственно меньшим влиянием действующего значения помехи, что, в совокупности, позволяет обеспечивать пеленгование шумового объекта во всем диапазоне горизонтальных углов с минимальной погрешностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2699923C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ШУМЯЩИЙ ОБЪЕКТ | 2010 |
|
RU2444747C1 |
| Способ обнаружения подводного источника широкополосного шума | 2022 |
|
RU2787951C1 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| Способ обнаружения шумящих, движущихся в море объектов | 2017 |
|
RU2653585C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |
Использование: изобретение относится к области гидроакустических пассивных систем определения положения подводных шумящих объектов, и в частности к области приемных антенн, определяющих направление на источник шумового сигнала. Сущность: пеленгатор содержит в качестве приемной антенны комбинированный векторно-скалярный приемник звука, состоящий из приемника звукового давления и трехкомпонентного приемника колебательной скорости с общим фазовым центром, имеющий один вертикальный и два горизонтальных канала, измеряющих акустическое давление и компоненты вектора колебательной скорости в горизонтальной плоскости и выполняющий расчет и осреднение горизонтальных компонент вектора интенсивности. При этом комбинированный приемник дополнительно содержит вторую пару ортогональных горизонтальных приемных каналов, геометрически повернутых относительно первой пары на угол 45°. Технический результат: создание компактной антенны для определения положения подводного шумящего объекта на основе комбинированного векторно-скалярного приемника звука для применения в мобильных системах контроля подводной обстановки, например, при размещении пеленгатора на борту автономных необитаемых подводных аппаратов или глайдеров. 1 ил.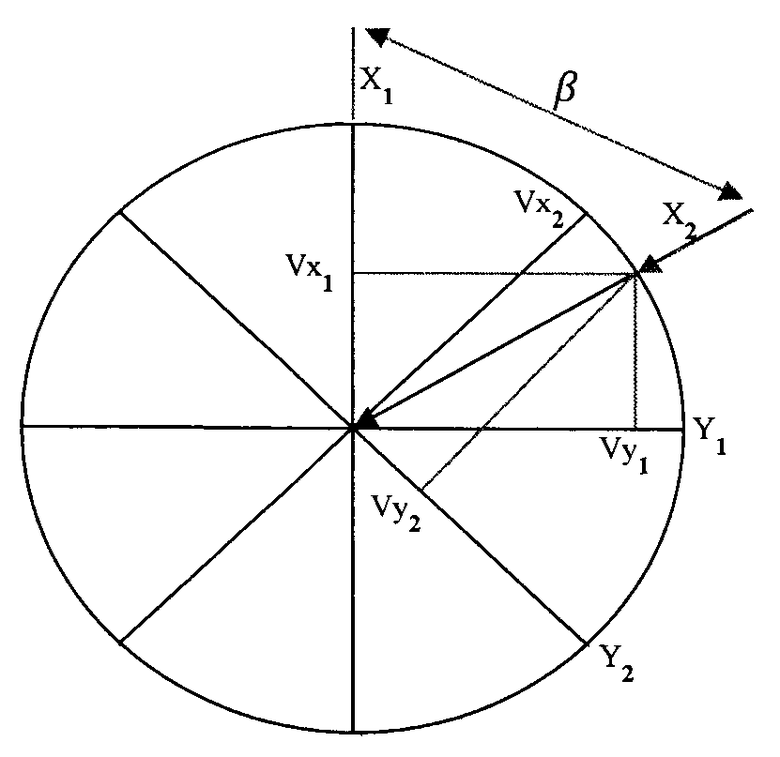
Пеленгатор низкочастотных шумовых сигналов для мобильных систем обнаружения малошумных подводных объектов, содержащий в качестве приемной антенны комбинированный векторно-скалярный приемник звука, состоящий из приемника звукового давления и трехкомпонентного приемника колебательной скорости с общим фазовым центром, имеющий один вертикальный и два горизонтальных канала, измеряющих акустическое давление р и компоненты вектора колебательной скорости в горизонтальной плоскости vx1 и vy1, выполняющий расчет и осреднение горизонтальных компонент вектора интенсивности

отличающийся тем, что комбинированный приемник дополнительно содержит вторую пару ортогональных горизонтальных приемных каналов, геометрически повернутых относительно первой пары на угол 45°, имеющую возможность измерения компонент вектора колебательной скорости в горизонтальной плоскости vx2 и vy2, с выполнением расчета и осреднения горизонтальных компонент вектора интенсивности

и определением текущего значения пеленга β из решения уравнения

| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| КОМБИНИРОВАННЫЙ ВЕКТОРНО-СКАЛЯРНЫЙ ПРИЕМНИК | 2018 |
|
RU2679931C1 |
| Двухкомпонентный приемник градиента давления и способ измерения градиента давления с его использованием | 2016 |
|
RU2624791C1 |
| МАШИНА ДЛЯ ОБВЯЗКИ ПРОВОЛОКОЙ ПАЧЕК ПРОКАТА | 0 |
|
SU165657A1 |
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2020 |
|
RU2735630C1 |
| CN 108195459 A, 22.06.2018. | |||
