Изобретение (группа изобретений) относится к области подводной техники, конкретно к устройствам для добычи россыпных полезных ископаемых со дна морей и океанов.
На дне морей и океанов залегают месторождения дорогостоящих полиметаллических руд в виде конкреций неровной формы, размером 5 см и более. Руда содержит в основном марганец (свыше 25%), а кроме того, железо, никель, медь, кобальт и молибден. Хотя конкреции обнаруживаются и на мелководье, основные их запасы сосредоточены на многокилометровых глубинах, обычно превышающих 5 км. Марганцевые конкреции обильно покрывают обширные поверхности океанского дна, их запасы исчисляются многими миллионами тонн.
Добыча этих ценных россыпей сулит огромные прибыли, однако для осуществления добычи требуется решить многие технические проблемы. Так, например, землечерпальные работы весьма сложны и невыполнимы на больших глубинах, а на малых глубинах мало эффективны и наносят непоправимый ущерб экологии морской среды. Сбор и подъем на поверхность конкреции при помощи батискафов является весьма дорогим и трудным делом, если учесть проблемы создания и стоимость самоходных подводных аппаратов, могущих погружаться на большие глубины (такие аппараты построены в единичных экземплярах).
Наиболее перспективным представляются добычные комплексы, включающие управляемые подводные роботы для сбора конкреций, неавтономные погружные накопительные устройства и механические связи с добычным судном. Предложены подводные роботы с манипуляторами, могущие работать в составе различных комплексов.
Известен глубоководный добычной комплекс, включающий добычное судно, дистанционно управляемый подводный робот с манипулятором, погружной грузовой контейнер, опускаемый под воду поплавок и кабель связи для функционирования робота: см. патент России 1351265, МПК Е 21 С 50/00, приоритет 06.06.85, опубликован 10.07.96 - прототип изобретения.
Известен телеуправляемый подводный робот, включающий протяженный гибкий элемент для обеспечения механической связи с управляющим объектом, средства обеспечения плавучести, манипулятор, движители позиционирования, маршевый гребной винт, разведывательно-навигационное оборудование: см. авт. свидетельство SU 1779634, МПК В 63 С 11/48, приоритет 05.12.88, опубликовано 07.12.92 - прототип изобретения.
Известный глубоководный добычной комплекс-прототип имеет ряд существенных недостатков, в числе которых следующие:
- ограниченные функциональные возможности в отношении рельефа морского дна в районе проведения работ: дно должно быть абсолютно ровным, иначе на него контейнер будет установлен с перекосом, и загрузить его и поднять не представится возможным;
- ограниченные функциональные возможности в отношении глубины в районе проведения работ: при достаточно большом расстоянии между поплавком и устанавливаемым на дно балластом соединяющий их трос будет раскачиваться, что затруднит перемещение по нему контейнера; вообще же невозможно обеспечить погружение контейнера на предельные глубины залегания конкреций, поскольку для их достижения требуется наращивать трос (посредством соединительных карабинов) при сматывании его с судовых лебедок;
- при управлении роботом с добычного судна, из-за сложности позиционирования робота ввиду дрейфа, весьма трудно контролировать проводимые на больших глубинах операции по сбору конкреций и последующей их погрузке в контейнер; само же устройство дистанционно управляемого подводного робота в патенте не разработано в достаточной степени.
Перечисленные недостатки известного глубоководного добычного комплекса предопределяют его малую эффективность и низкую надежность. Это же замечание справедливо и для вышеупомянутого телеуправляемого подводного робота-прототипа, что предопределено, в частности, следующими его недостатками:
- невозможностью управления плавучестью при обязательном позиционировании робота;
- расположением захватов груза сбоку корпуса робота, на удалении от центра масс, что грозит опрокидыванием робота при захвате груза;
- выдвижные опоры робота не позволяют осуществлять сбор конкреций в местах со сложным рельефом дна и наличием ила;
- общая компоновка робота и взаимное расположение его агрегатов весьма затрудняют погрузку собранного материала в грузовой контейнер.
Перечисленные недостатки телеуправляемого подводного робота-прототипа усугубляются наличием бортовой гидравлической системы для привода грузозахватных органов. Необходимое для функционирования робота энергетическое оборудование размещено на борту аппарата, что грозит его потерей при отказе электрических цепей. Робот-прототип весьма тяжел и сложен, дорог в изготовлении, что в итоге снижает эффективность глубоководных комплексов, в составе которых используется робот-прототип.
Изобретение решает техническую задачу повышения эффективности и надежности работы глубоководного добычного комплекса и телеуправляемого подводного робота.
Поставленная техническая задача решается тем, что в глубоководном добычном комплексе, включающем добычное судно, дистанционно управляемый подводный робот с манипулятором, погружной грузовой контейнер, опускаемый под воду поплавок и кабель связи для функционирования робота, - согласно изобретению, - добычное судно соединено посредством спускоподъемного каната с поплавком, в котором смонтирован успокоитель качки, и к нему подвешен гидростат с собственным поплавком и обитаемой гондолой, причем этот поплавок снабжен средствами регулирования плавучести с емкостями под легкую жидкость, а корпус гондолы снабжен средствами поворота относительно стеллажа полезного груза вокруг горизонтальной оси; по этой оси к гондоле подсоединен с одной стороны бокс-гараж для размещения дистанционно управляемого мобильного исследовательского модуля, а с другой стороны подсоединен бокс с источником электрической энергии для гондолы и компрессорным оборудованием для забора из нее избыточного воздуха; гидростат снабжен бортовыми движителями с возможностью их работы в режимах переднего или заднего хода и враздрай; гондола соединена с добычным судном, подводным роботом и исследовательским модулем волоконно-оптической системой связи с расположенными внутри гондолы матричными оптическими табло и размещенным на иллюминаторе оптическим концентратором; грузовой контейнер имеет разъемное крепление с гидростатом для совместного с ним погружения и подъема; в целях энергоснабжения элементов комплекса к гидростату крепятся погружные электрические аккумуляторы со средствами их экстренного сброса при аварийном подъеме; подводный робот выполнен с возможностью управления им по кабелю связи из гондолы гидростата и снабжен средствами регулирования плавучести с емкостью под легкую жидкость, перекачиваемую из поплавка гидростата по сматываемому шлангу, который обеспечивает механическую связь между гидростатом и роботом в целях их совместного погружения, функционирования и подъема; кабель связи скручен в упруго растяжимую спираль с наружной защитной оболочкой, герметично заполненной жидким диэлектриком, в котором размещены оптические волокна вместе с электрическим проводом для энергоснабжения робота от вышеупомянутых электрических аккумуляторов.
В частных случаях изобретения:
- глубоководный добычной комплекс включает два и более последовательно соединенных канатами поплавков с успокоителями качки, причем верхний из поплавков соединен с добычным судном, а к нижнему поплавку подвешен гидростат;
- движительные устройства гидростата выполнены в виде гребных винтов;
- движительные устройства гидростата выполнены в виде водометов;
- в целях более полного заполнения грузовой контейнер выполнен вращаемым посредством электропривода;
- в целях экстренного сброса погружные электрические аккумуляторы размещены в опрокидываемом контейнере;
- гидростат, грузовой контейнер и погружные электрические аккумуляторы смонтированы на общей ферме;
- гондола гидростата, грузовой контейнер и погружные электрические аккумуляторы смонтированы на общей ферме, которая подвешена к поплавку гидростата;
- наружная поверхность кабелей и канатов содержит химические вещества, отпугивающие морских животных.
Поставленная техническая задача решается также тем, что в телеуправляемом подводном роботе, включающем протяженный гибкий элемент для обеспечения механической связи с управляющим объектом, средства обеспечения плавучести, манипулятор, движители позиционирования, маршевый гребной винт, разведывательно-навигационное оборудование, согласно изобретению, средства обеспечения плавучести содержат смонтированный на вертикально расположенном электроприводном барабане с возможностью вращения вместе с ним, помещенный в негерметичный корпус эластичный мешок, который соединен с намотанным на барабане шлангом для подачи в мешок легкой жидкости из внешней емкости, причем посредством шланга обеспечена механическая связь робота с управляющим объектом; манипулятор смонтирован под вышеупомянутым барабаном и имеет электрический привод; движители позиционирования выполнены в виде нескольких водометов, сопла которых, снабженные управляющими клапанами, по-разному ориентированы относительно горизонтально расположенной, кольцевой общей питающей камеры; маршевый гребной винт смонтирован шарнирно для управления его положением; разведывательно-навигационное оборудование включает сканирующий твердотельный лазер, телевизионный гидролокатор и цифровую видеокамеру, образующие в совокупности трехмерную телевизионную сканирующую систему, с управлением ею как автоматически, и по командам оператора; робот имеет энергоснабжение от внешнего источника.
В частных случаях изобретения:
- электропривод барабана осуществлен посредством конической шестеренчатой передачи, ведомая шестерня которой конструктивно совмещена со щекой барабана;
- в целях упорядоченного сматывания и наматывания шланга он пропущен через направляющие ролики и кольцо;
- манипулятор содержит захваты, приводимые в действие посредством винтовой пары с перемещаемой гайкой, на периферии которой шарнирно смонтированы упомянутые захваты;
- на боковых поверхностях захватов размещены водяные сопла для размывания грунта;
- манипулятор смонтирован шарнирно.
От осуществления изобретения ожидается технический результат, совпадающий с существом решаемой задачи.
Изобретение иллюстрируется при помощи фиг.1-7:
- фиг.1 представляет общий вид глубоководного добычного комплекса в рабочем положении;
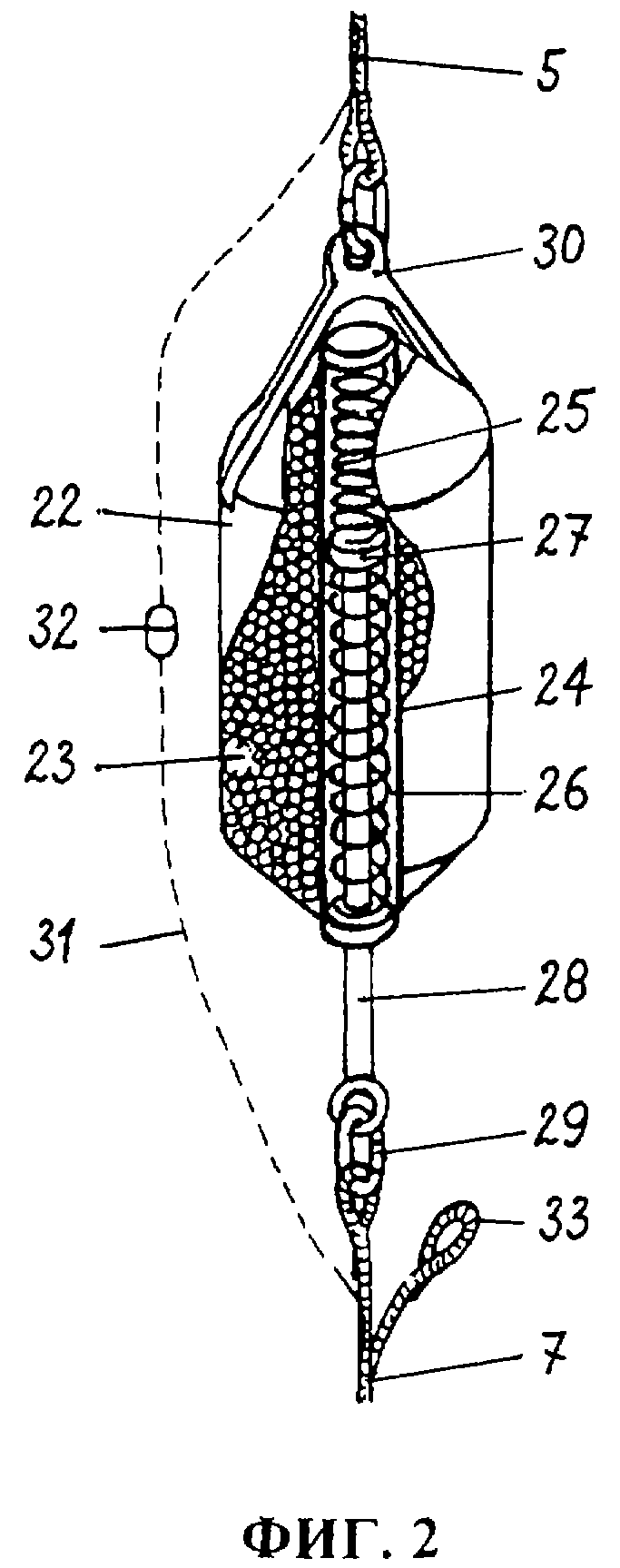
- фиг.2 показывает устройство поплавка 6;
- фиг.3 показывает устройство гидростата 9 с соседними элементами;
- фиг.4 представляет фронтальный разрез гондолы 11;
- фиг.5 представляет поплавок 10 гидростата с отдельной подвесной рамой;
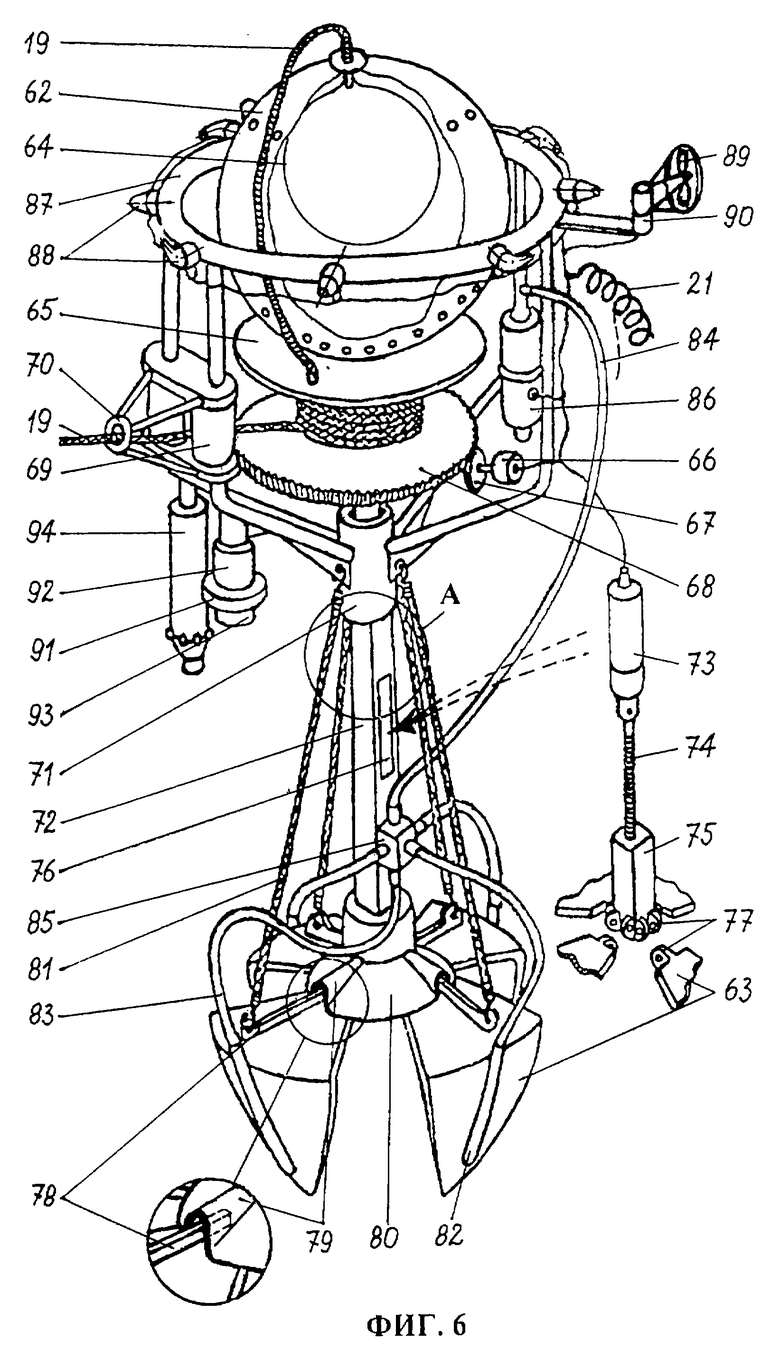
- фиг.6 представляет общий вид телеуправляемого подводного робота 20;
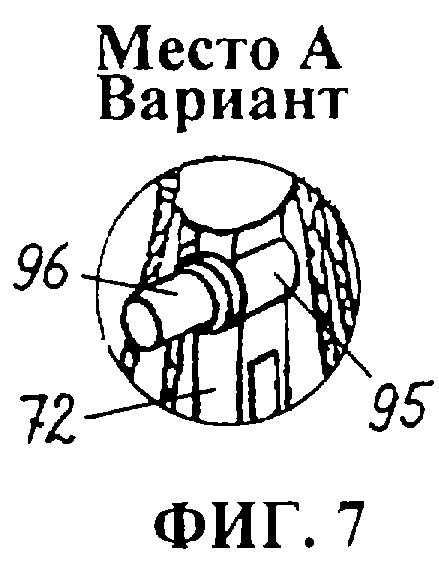
- фиг.7 представляет вариант шарнирного крепления манипулятора в роботе 20.
В целях наглядности масштаб отдельных элементов на фигурах не соблюден.
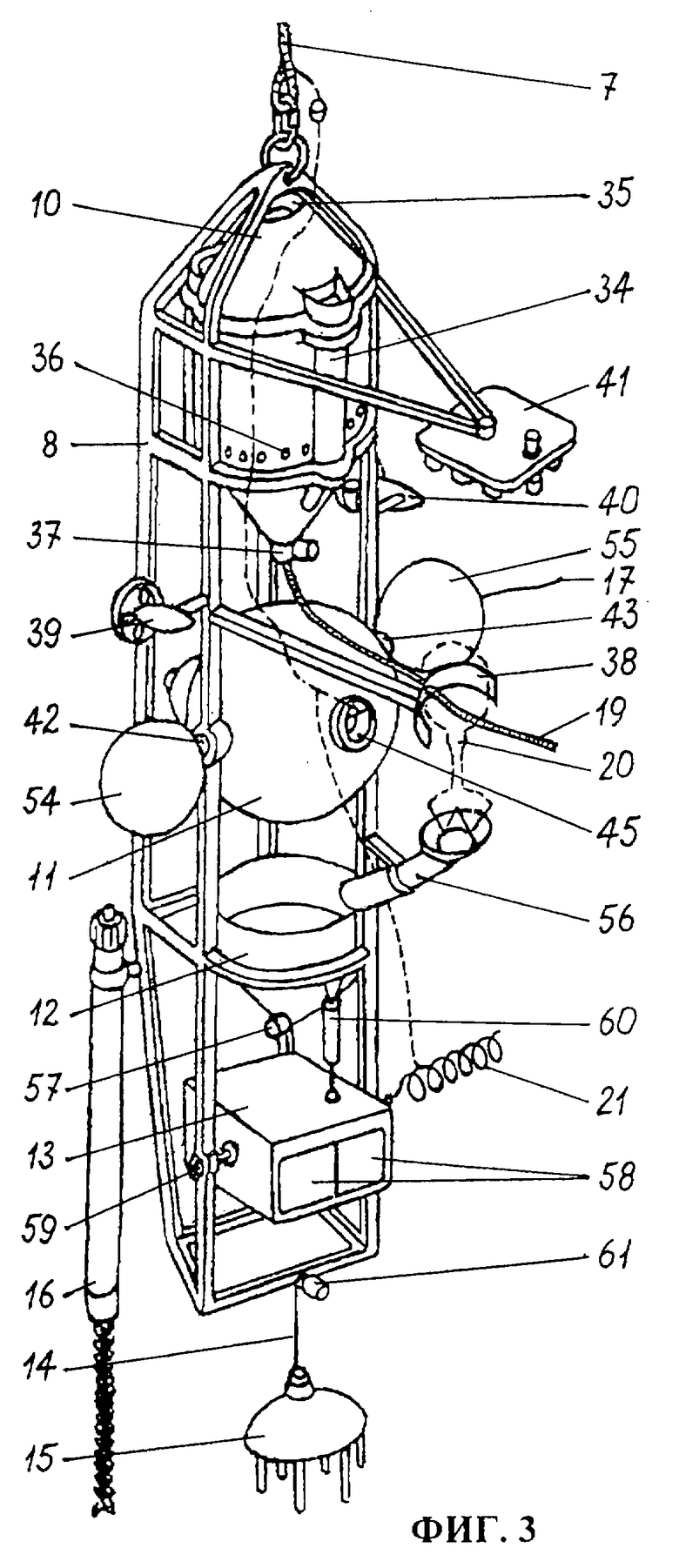
Как показано на фиг.1, глубоководный добычной комплекс включает добычное судно 1, оборудованное двумя лебедками 2 и 3 со спускоподъемными канатами 4 и 5, соответственно. К канату 5 подвешен поплавок 6, в котором смонтирован успокоитель качки (см. ниже), и к нему посредством каната 7 и фермы 8 подвешен гидростат 9 с собственным поплавком 10 и гондолой 11. Под ней посредством упомянутой фермы под- вешены грузовой контейнер 12 и контейнер (ящик) 13 с электрическими аккумуляторами. Внизу фермы прикреплен на гайдропе 14 пригруз 15, а сбоку фермы прикреплено шнековое бурильное устройство 16. Посредством кабеля 17 к гидростату 9 подсоединен управляемый из гондолы мобильный исследовательский модуль 18. Посредством шланга 19 к гидростату подсоединен также управляемый из гондолы подводный робот 20, питаемый по кабелю 21 электрической энергией из контейнера 13.
На фиг.2 показано устройство поплавка 6. Его выполненный в виде цилиндра с верхним и нижним конусами негерметичный корпус 22 заполнен по периферии сферическими пустотелыми микрогранулами 23 из стекла или легкой прочной пластмассы. Микрогранулы выдерживают обжимающее давление гидросреды на глубинах, измеряемых километрами, благодаря чему обеспечивается необходимая плавучесть поплавка. По оси поплавка расположена силовая труба 24 с находящимися внутри верхней и нижней пружинами 25 и 26, которые опираются на разделяющую подвижную шайбу 27 и на торцевые поверхности трубы. В нижнем торце выполнено отверстие, через которое проходит охватываемая пружиной 26 и скрепленная с шайбой 27 подвижная силовая тяга 28. Ее нижний конец выходит из корпуса поплавка наружу и снабжен кольцом для возможности подвеса к поплавку других структурных частей добычного комплекса. Труба 24 вместе с содержащимися в ней элементами представляют собой успокоитель качки. Этот механизм предназначен для предотвращения передачи динамических нагрузок (гашения рывков) от добывающего судна на подвешенный к нему на канате 7, посредством карабина 29, гидростат. Аналогичным образом поплавок 6 крепится к соединяющему его с добычным судном спускоподъемному канату 5; с этой целью в верхней части поплавка предусмотрен силовой узел 30.
Оба упомянутых каната 5 и 7 выполнены одинаково: несущий трос, изготовленный из высокопрочного синтетического волокна (например, кевлар или аналогичный материал), окружен плавающей (полипропиленовой) защитной оболочкой (в итоге достигнута нулевая плавучесть каната); в центре размещены снабженные оболочками волоконные световоды 31. Посредством быстроразъемной матричной оптической муфты 32 световоды разных канатов соединены между собой; таким же образом они подсоединены к другим световодам общей волоконно-оптической кабельной системы добычного комплекса. (Здесь, как и на других фиг. , световоды обозначены штриховыми линиями; разводка кабелей представлена схематично). Чтобы исключить опасность повреждения (перекусывания) кабелей и канатов морскими животными (особенно это касается спускоподъемного каната), в их наружную поверхность могут вводиться (включаться) отпугивающие химические вещества (составы).
На верхнем конце каната 7 предусмотрено ответвление 33 для перехвата гидростата на канат 4 палубной лебедки 2 при операциях спуска и подъема (см. ниже).
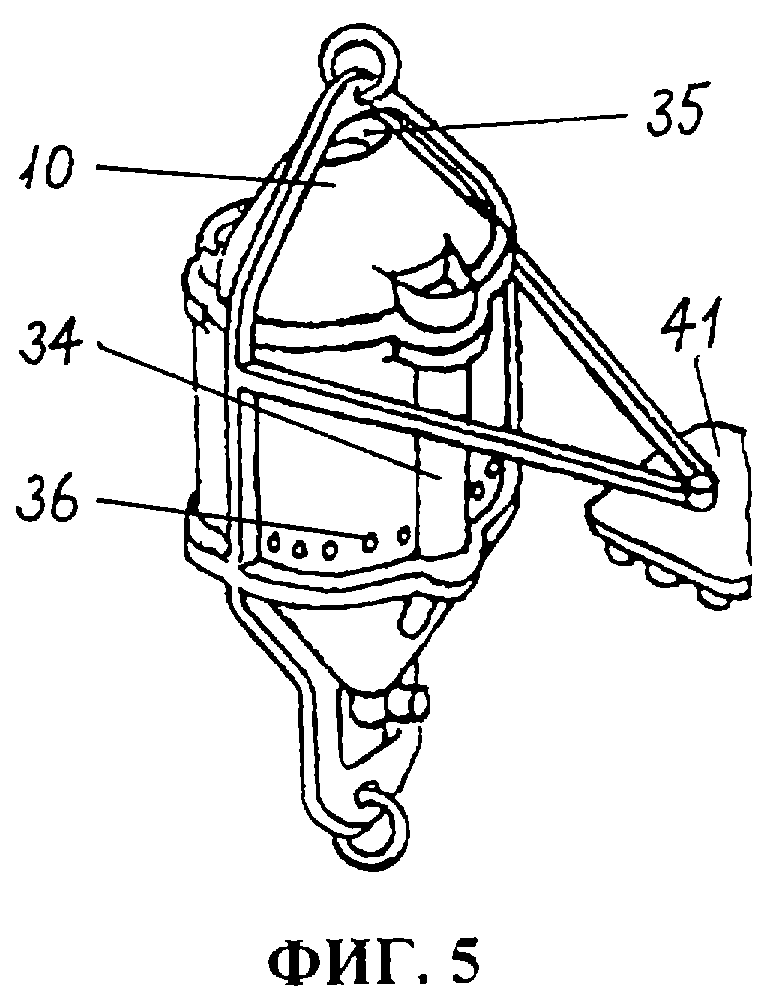
На фиг. 3 показано устройство гидростата 9 с соседними элементами. Он, как упоминалось, включает собственный поплавок 10 и гондолу 11. Поплавок предпочтительной конструкции выполнен в форме цилиндра, сопряженного с верхним и нижним конусами. Конструкция - секционная, с внутренними переборками, изготовленная из рифленого титанового листа или из высокопрочного пластика. На периферии поплавка имеются два симметричных бункера 34 для размещения балласта в виде металлических шариков; для их загрузки и сброса предусмотрены соответствующие горловины и управляемые дюзы известного типа. Внутри поплавка размещены (не показанные на фиг.) емкости-мешки из прорезиненной ткани для заливки легкой (то есть с меньшей, чем у воды, плотностью) жидкости: обычно это легкая фракция бензина. Доступ к горловинам мешков обеспечивается через крышку 35 вверху поплавка. Предусмотрены дренажные отверстия 36 для свободного доступа забортной воды внутрь поплавка в целях обжатия емкостей-мешков. Внизу поплавка смонтирован погружной электронасос 37 для перекачки содержимого одного или нескольких мешков по шлангу 19 в емкость подводного робота и в обратном направлении для регулирования плавучести робота. Указанный шланг пропущен через предусмотренную на ферме 8 скобу 38, которая является приемным элементом для подводного робота 20 (контур его в состыкованном с гидростатом положении обозначен штрихами).
Посредством фермы 8, скрепленной с поплавком 10, он подвешен к поплавку 6 на канате 7; узел подвеса выполнен аналогично показанным на фиг.2. На ферме, по бортам охватываемого ею поплавка, смонтированы электроприводные движительные устройства 39 и 40 гидростата. Для их работы в поплавке 10 имеется отсек с погружными электрическими аккумуляторами или альтернативными источниками тока. Движительные устройства (например, гребные винты, показанные на фиг.3, либо снабженные поворотными насадками водометы), устроены и смонтированы так, что могут работать в режиме переднего (маршевого) или заднего хода и враздрай (то есть создавая движущие усилия в противоположных направлениях). Наверху поплавка установлен (не показанный на фиг.) бокс, в котором размещены эталонный компенсатор плавучести, радиолокационный отражатель и приборный буй с радиопередатчиком. Он включается автоматически при аварийном всплытии гидростата, например при обрыве спускоподъемного каната.
К ферме 8 присоединена поворотная платформа 41, на которой смонтированы антенна для звукоподводной связи, антенна эхолота "вверх-вниз" и осветительная панель. Последняя включает галогенные, ультрафиолетовые и инфракрасные светильники, светосильные светодиоды, снабженные отражателями и прочными акриловыми колбами. Положение платформы 41 может регулироваться по командам из гондолы гидростата. На ферме 8 также может размещаться герметичный приборный отсек, в котором находится автономно функционирующее научное оборудование по обеспечению запланированных исследовательских программ, а также содержится аппаратура для оперативного контроля технического состояния гидростата и его отдельных систем. В приборном отсеке находятся, в частности, бортовая ЭВМ, глубиномеры, эхолот-гидролокатор, аппаратура звукоподводной связи, приборы аварийной сигнализации, автоматика аварийного всплытия, цифровая видеокамера, разнообразные приборы для исследования океана и океанического дна.
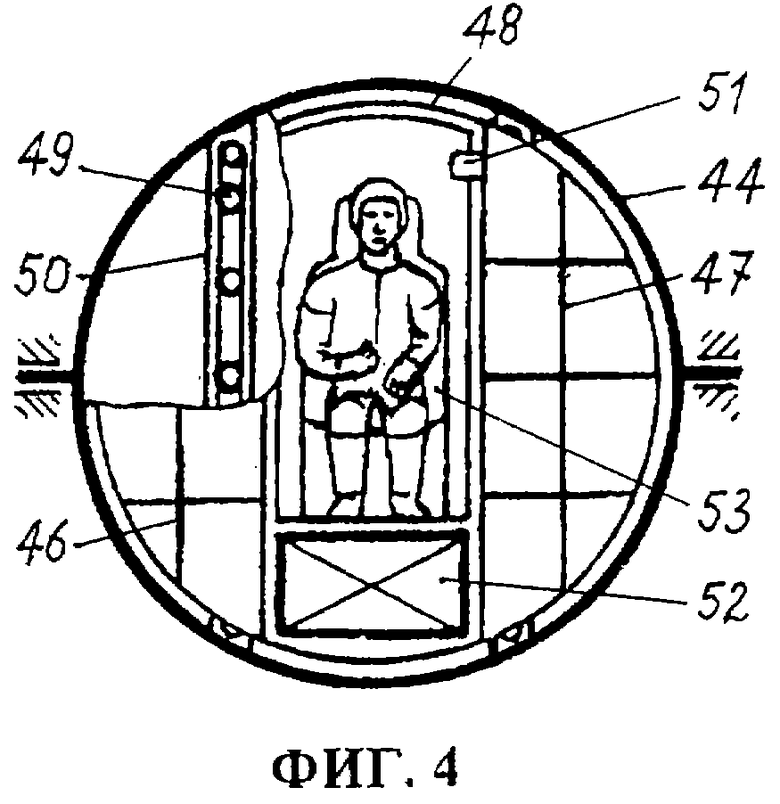
На ферме 8 смонтированы подшипники, в которых посредством цапф 42 и 43 установлена с возможностью вращения вокруг горизонтальной оси гондола 11. Ее фронтальный разрез в плоскости расположения указанной оси представлен на фиг. 4. Гондола имеет прочный сферический корпус 44, рассчитанный на размещение одного гидронавта. Для возможности наблюдения окружающей гидросреды корпус снабжен (показанным на фиг. 3) иллюминатором 45. Эта вставка из прочного прозрачного материала, выполненная в форме усеченного конуса, ось которого ориентирована перпендикулярно упомянутой выше фронтальной плоскости.
Оборудование в гондоле размещается на гравитационном стеллаже, состоящем из двух симметричных боковых частей 46 и 47, которые выполнены в виде сферических сегментов-обечаек, скрепленных рамой 48. Поверхность стеллажа, обращенная к корпусу гондолы, снабжена обоймами 49 с шариками, которые входят в желоба 50, смонтированные изнутри корпуса. Благодаря этому корпус и стеллаж могут вращаться относительно друг друга вокруг оси цапф (аналогичное устройство гондолы описано в патенте RU 2121448 С1, МПК В 63 С 11/34). Вращение корпуса гондолы может осуществляться посредством приводного ролика (фрикционной или иной) передачи момента от вала электродвигателя 51, который смонтирован на стеллаже. Стеллаж является устройством гравитационного типа: его центр масс при загрузке полезным грузом расположен ниже упомянутой оси вращения, и при отклонении от нормального положения стеллаж стремится вновь занять это первоначально устойчивое положение. Относительно оси расположения цапф гондола статически уравновешена. В целях управления положением гондолы внизу гравитационного стеллажа может монтироваться гироскопическое устройство 52 с ориентированными по вертикальной оси гондолы реактивными маховыми массами. Описанное устройство гондолы, позволяющее менять пространственную ориентацию ее корпуса, дает возможность ориентировать иллюминатор в любом желаемом направлении.
Гидронавт входит в гондолу через полусферический люк, расположенный на корпусе гондолы диаметрально противоположно иллюминатору 45. (Входной люк может снабжаться дополнительным иллюминатором меньшего размера). В гондоле гидронавт располагается на откидном анатомическом кресле-лежаке 53, которое смонтировано на раме стеллажа. Гидронавт одет в костюм с вшитым коллектором из распределенных по телу гибких проницаемых трубчатых элементов. В них подается воздух с регулируемой температурой при помощи электрофена, размещенного на поясе гидронавта. Для обеспечения жизненных функций и возможности работы гидронавта внутрь гондолы помещаются, в частности, следующие приборы и оборудование: система регенерации воздуха, осветительная система, термос с пищей и питьем, писсуар, аварийный фонарь, диктофон, цифровая видеокамера, кнопочный пульт дистанционного управления бортовой ЭВМ (находящейся в приборном отсеке, смонтированном на ферме 8) с инфракрасным излучателем, джойстик управления мобильным исследовательским модулем 18, джойстик управления подводным роботом 20. В районе иллюминатора смонтированы многочисленные матричные оптические табло, представляющие собой мониторы аудио-, видеоинформации для гидронавта. На иллюминаторе гондолы размещен оптический концентратор, к которому подсоединены световоды волоконно-оптической линии связи добычного комплекса.
Часть необходимого для гидронавта оборудования размещена в герметичном боксе оборудования 54, который сообщается с внутренним пространством гондолы, будучи присоединен к ее корпусу со стороны цапфы 42 (фиг.3). В указанном боксе находится, в частности, компрессорная установка с электроприводом, обеспечивающая нормальное атмосферное давление в гондоле. Здесь же находится аккумуляторная батарея для энергоснабжения гондолы и мобильного исследовательского модуля 18. Он размещается в боксе-гараже 55, который смонтирован на гондоле противоположно боксу оборудования, со стороны цапфы 43.
Модуль 18 (общий вид которого показан на фиг.1) аналогичен дистанционному аппарату наблюдения (ДАНу), представленному патентом РФ на промышленный образец 46715. Модуль представляет собой сплюснутое по бокам обтекаемое симметричное тело положительной плавучести со смещенным книзу (относительно центра плавучести) центром масс, что обеспечивает устойчивое вертикальное положение аппарата. Его корпус, выполненный из пластика, снабжен верхним килем и боковыми плавниками-стабилизаторами. В носовой и кормовой частях расположены окруженные светодиодами акриловые иллюминаторы для размещенных внутри, в прочных титановых боксах, цифровых видеокамер обзора полной гидросферы. Над иллюминаторами находятся поворотные маршевые сопла водометного движителя. В поперечной плоскости модуля установлены V-образно водометные сопла-заглубители для регулирования плавучести. В кормовой части имеется направляющая для волоконно-оптического кабеля 17, соединяющего модуль с гондолой. Из нее на модуль посылаются управляющие сигналы, а в обратном направлении передается телеинформация. Волоконно-оптический кабель в полиэтиленовой оболочке имеет практически нулевую плавучесть и способен выдержать любое давление водной среды (при необходимости оболочка может быть усилена). Кабель намотан на электроприводной барабан, размещенный в модуле. Здесь же находится электрическая батарея малой емкости для возможности аварийного наматывания кабеля в целях возврата модуля в бокс-гараж.
На ферме 8 под гондолой размещен грузовой контейнер 12 для накопления полезных ископаемых, доставляемых отдельными порциями роботом 20. Контейнер имеет форму сходящегося книзу конуса с примыкающим сверху цилиндром. Над ним смонтирован приемный лоток 56 с воронкой, расположенной прямо под местом причаливания робота к гидростату. Поскольку контейнер загружается только с периферии, в месте расположения скобы 38, то в целях более полной загрузки может предусматриваться возможность вращения контейнера от смонтированного под ним электропривода 57. Он снабжается током от электрических аккумуляторов 58, которые размещены ниже в контейнере (ящике) 13. Он установлен на ферме 8 с возможностью поворота (опрокидывания) в горизонтальных осях 59, и для этого предусмотрен электроприводной механизм 60 с выдвижной штангой, воздействующей на верхнюю стенку контейнера.
От аккумуляторов 58 питаются также различные системы подводного робота 20. С этой целью предусмотрен упомянутый выше кабель 21. Его многожильный электрический провод помещен в жидкий диэлектрик, которым герметично заполнен скрученный в спираль упруго растягивающийся шланг. Этим гарантирована надежность электрической изоляции кабеля при работе подводного робота на многокилометровых глубинах. В самой сердцевине кабеля размещены относящиеся к роботу световоды волоконно-оптической системы связи добычного комплекса; соответствующий ввод показан штриховой линией.
Сбоку фермы 8, в районе расположения контейнера, к ней может крепиться питаемое от аккумуляторов 58 электроприводное бурильное устройство 16 шнекового типа для взятия донного керна породы. От этих же аккумуляторов снабжается током электропривод 61, посредством которого сматывается гайдроп 14. Прикрепленный к нему пригруз 15 представляет собой массивную чугунную чушку, в толще которой могут размещаться ряд полезных устройств, например кассетный сейсмозаряд для зондирования океанского дна и заборники для приема кернов донной породы. На случай аварии (например, подсоса гидростата) предусматриваются средства экстренного сброса пригруза.
Наличие общей рамы 8 для монтажа описанных выше элементов не является обязательным. Например, могут предусматриваться две отдельные рамы: одна для поплавка гидростата (см. фиг.5) и другая - для остальных элементов. Эти две рамы могут соединяться, например, посредством вертлюгов.
На фиг.6 представлен общий вид телеуправляемого подводного робота 20. В нормальном рабочем положении он представляет собой ориентированный по вертикали агрегат, в верхней части которого находится негерметичный корпус - сферический перфорированный баллон 62 системы регулирования плавучести, а внизу располагаются захваты 63 манипулятора. В конкретном случае он представляет собой грейферное устройство, а захваты являются челюстями. В верхнем пространстве баллона (выполненного, например, из титана или высокопрочного пластика), размещен эластичный мешок (прорезиненная ткань, полиэтилен и т.д. ) 64, который посредством шланга 19 соединен с бензиновой емкостью поплавка 10. Шланг намотан на прикрепленный снизу баллона вертикально расположенный барабан 65, вращаемый электродвигателем 66 через коническую шестеренчатую передачу. Она включает ведущую быстроходную шестерню 67 и малооборотную ведомую шестерню 68, конструктивно совмещенную со щекой барабана 65. В целях упорядоченного сматывания и наматывания шланга он пропущен через направляющие ролики 69 и кольцо 70.
Ось барабана смонтирована в снабженной подшипниками втулке 71, снизу которой прикреплен манипулятор посредством полой стойки 72 квадратного сечения с размещенным внутри приводом для челюстей 63. Он содержит электродвигатель 73, к которому через редуктор подключена винтовая пара 74-75. Вырезанное в стойке 72 окно 76 обеспечивает удобство сборки. При этом корпус электродвигателя 73 фиксируется внутри стойки, с тем чтобы при вращении винтовой пары ее квадратная гайка 75 могла перемещаться вдоль стойки, воздействуя на челюсти через шарнирные петли 77. В целях фиксации положений челюстей сверху них выполнены радиальные гребни 78, взаимодействующие с коробчатыми выступами 79 на конической крышке 80, которая смонтирована внизу стойки 72; также с указанной целью наружные концы гребней прикреплены посредством тяжей 81 к втулке 71.
Эффективность описываемого грейферного устройства повышена благодаря предусмотренной системе размыва грунта, включающей расположенные на боковых поверхностях челюстей сопла 82, питаемые водой под давлением по шлангам 83 и 84 - через электромагнитный клапанный блок 85 - от электронасоса 86. Он смонтирован на кольцевой камере 87 водометного движителя, питаемого от указанного электронасоса. На камере расположены по-разному ориентированные сопла 88, которые снабжены индивидуальными электромагнитными клапанами, что обеспечивает точное позиционирование подводного робота при его работе. В дополнение к описанному водометному движителю имеется маршевый движитель 89, обеспечивающий быстрое перемещение робота по горизонту. Этот движитель выполнен в виде гребного винта с кольцевой насадкой, который смонтирован шарнирно на камере 87, в вертикальной петле 90, и снабжен средствами управления положением (на фиг. не показаны).
Робот снабжен разведывательно-навигационным оборудованием, которое включает размещенные в прочных (титановых) герметичных боксах светодиодный фонарь 91, телевизионный гидролокатор 92, цифровую видеокамеру 93 и сканирующий твердотельный лазер 94. Три последних элемента в совокупности образуют трехмерную телевизионную сканирующую систему с избирательной видимостью в замутненной среде на дальних и на ближних планах; эта сканирующая система управляется автоматически и по командам гидронавта.
Энергоснабжение электрических агрегатов подводного робота обеспечивается от смонтированной на ферме подвеса гидростата аккумуляторной батареи 58, по кабельной сети с главным стволом-кабелем связи 21. Как упоминалось, в его сердцевине размещены также световоды, обеспечивающие взаимодействие робота с остальной частью добычного комплекса; соответствующий вывод показан штриховой линией.
На фиг.7 представлен возможный вариант шарнирного крепления манипулятора в описанном роботе 20. Здесь в стойку 72 введен шарнирный узел 95, управляемый от электропривода 96.
Предлагаемые глубоководный добычной комплекс и телеуправляемый подводный робот функционируют следующим образом.
Обеспечивающее судно доставляет в заданный район мирового океана размещенные на палубе поплавок 6 и отдельно от него ферму 8 со смонтированным на ней гидростатом и остальным оборудованием. Вначале спускают на воду ферму с оборудованием - лебедкой 2 на канате 7, удерживая его за конец 33. Гидронавт при этом уже находится в гондоле гидростата, поплавок которого загружен балластом частично, так что аппарат может погрузиться в воду до верхней конической части. Затем его догружают расчетным эталонным количеством балласта (до необходимой отрицательной плавучести) и начинают погружение гидростата, сматывая канат 7. Для достижения больших глубин используют попеременно две лебедки со сменными барабанами, канаты с которых (например, километровой длины) соединяют в процессе опускания аппарата, используя для этого карабины и оптические муфты. (Сменные барабаны удобно размещаются друг за другом в ручьевых пазах на судовой палубе).
После достижения гидростатом определенной глубины спускают на воду при помощи лебедки 3 на канате 5 поплавок 6. Затем снизу него подцепляют свободный конец каната 7, снимая его конец 33 с лебедки 2. Далее на канате 5 опускают поплавок 6 с подвешенным к нему на ферме 8 оборудованием до достижения рабочего горизонта добычного комплекса. Дальнейшая работа комплекса и его отдельных структурных элементов понятна из приведенного их описания.
Дополнительно отметим роль волоконно-оптической линии связи, которой объединены функциональные элементы глубоководного добычного комплекса в целях подачи управляющих команд, приема-передачи цифровой аудио- и видеоинформации и связи гидронавта с добычным судном. Гидронавт с момента входа в гидростат имеет возможность общаться с диспетчером обеспечивающего судна. Оба участника получают необходимую оперативную информацию о техническом состоянии систем погружаемого оборудования и его удалении от океанского дна по показаниям имеющейся аппаратуры.
Гидронавт имеет возможность контролировать пространственное положение гондолы (и, следовательно, иллюминатора), в целях управления обзором окружающей гидросферы. При работе враздрай бортовых движителей 39 и 40 гондола вращается вокруг вертикальной оси, а включением электродвигателя 51 на гравитационном стеллаже 46-47 достигается поворот корпуса гондолы вокруг горизонтальной оси. Таким образом, гидронавт получает возможность широкого обзора гидросферы через ограниченное пространство иллюминатора, который можно сориентировать в любом желаемом направлении.
Бортовые движители дают гидронавту возможность осуществлять широкие маневры под водой (согласуя их с обеспечивающим судном), что существенно расширяет возможности добычного комплекса. Управляемый из гондолы мобильный исследовательский модуль (который может быть послан гидронавтом на расстояние до 150 м) позволяет исследовать обширную гидросферу вокруг гондолы и выбрать площадь для проведения добычных работ. Далее разведывательно-навигационное оборудование робота в совокупности с его движителями и системой регулирования плавучести позволяют осуществить эффективный сбор конкреций.
Программа работ под водой рассчитана на несколько (до трех) суток. Этого времени достаточно для обследования обширной площади предполагаемых залежей полезных ископаемых и их сбора. Все указанное время внутри гондолы поддерживается нормальное атмосферное давление за счет сброса избыточного воздуха в бокс оборудования 54, где он нагнетается компрессором в предусмотренный для этого пустой баллон. После того как работа завершена, подводное оборудование вместе с добытыми полезными ископаемыми поднимают на поверхность воды, а с нее на судно обеспечения - в последовательности обратной спуску. На одном из этапов операции подъема к канату 4 лебедки 2 подцепляют за конец 33 канат 7.
Аварийный подъем гидростата (который может потребоваться, например, при присасывании к грунту, а также в случае внештатных ситуаций при опускании и подъеме) осуществляют путем сброса балласта из поплавка 10 гидростата и сброса пригруза 15. Чтобы ускорить всплытие, могут сбрасываться и электрические аккумуляторы из контейнера 13 - путем его опрокидывания (для предотвращения несанкционированного сброса в конструкции предусматриваются должным образом устроенные держатели).
Представленное на фиг.1-7 устройство глубоководного добычного комплекса и телеуправляемого подводного робота не исчерпывает существо изобретения; например:
- добычной комплекс может включать два и более последовательно соединенных канатами поплавков 6 с успокоителями качки (верхний поплавок соединен с добычным судном, а к нижнему подвешен гидростат);
- на ферме 8 наряду с бурильным оборудованием или вместо него могут монтироваться другие устройства для проведения глубоководных исследований;
- в целях удобства транспортировки оборудования ферма 8 может выполняться разборной, с быстроразъемными соединениями;
- устройство грузового контейнера 12 может быть различным;
- конструкция контейнера 13 и узлов его крепления может варьироваться;
- вокруг гондолы на ферме 8 могут монтироваться несколько телеуправляемых подводных роботов 20;
- кабель 21 может быть принадлежностью подводного робота;
- негерметичный корпус 62 в телеуправляемом подводном роботе, служащий ограничительным поддерживающим элементом для мешка 64, может выполняться в виде жесткого сетчатого каркаса или иметь другое конструктивное оформление;
- привод барабана 65 может выполняться с передачей другого типа (например, фрикционной);
- количество водометных сопел 88 может варьироваться, они могут выполняться поворотными, могут быть объединены в группы с управлением от общих клапанов;
- маршевый гребной винт 89 в подводном роботе может быть как тянущим, так и толкающим;
- в зависимости от назначения управляемого подводного робота захваты манипулятора могут иметь различную конфигурацию и отличаться приводным механизмом; при этом водяные сопла 82 могут не использоваться;
- робот может снабжаться кожухом для удобства в обращении и во избежание задевания робота за другие конструкции при его причаливании к гидростату и т.д.
Как видно из приведенного описания, предлагаемый глубоководный добычной комплекс характеризуется целым рядом технических достоинств. Прежде всего, этот комплекс удобен в обслуживании. Он выполнен таким образом, что его оборудование может доставляться в район погружения по частям многими видами транспорта: от вертолета до судна обеспечения. Входящий в состав комплекса гидростат легко спускается на воду и быстро приводится в рабочее положение даже в штормовую погоду. Без проблем погружаемое оборудование вновь принимается на судно обеспечения в сложных метеоусловиях. Гидростат надежен, поскольку сферическая форма гондолы для размещения гидронавта выполнена с ограниченным числом отверстий минимального размера (для пропускания тонких световодов). Малый размер обитаемой гондолы (рассчитанной на одного человека) упрощает ее серийное производство. Все проводимые операции находятся под постоянным контролем гидронавта и персонала обеспечивающего судна. При аварийном всплытии гидростат быстро обнаруживается благодаря автоматическому включению радиопередатчика. После этого гондола с гидронавтом оперативно поднимается с воды.
Предлагаемые глубоководный добычной комплекс и телеуправляемый подводный робот позволяют осуществить эффективный сбор и надежную доставку на добычное судно подводных полезных ископаемых без каких-либо ограничений по глубине и рельефу морского дна. Предлагаемый робот эффективно работает даже в замутненной среде; он отличается малой массой, простотой конструкции и низким энергопотреблением. Будучи неотъемлемой частью добычного комплекса, этот робот может использоваться также в составе других комплексов: например, его можно брать на борт батискафа или использовать для непосредственной доставки различных грузов на добычное судно.
Вышеизложенное подтверждает технический результат, ожидаемый от осуществления изобретения. С учетом экологической безопасности и возможности серийного изготовления предлагаемых технических устройств они являются действительно эффективным и экономически выгодным средством для освоения ресурсов мирового океана. Основным назначением предлагаемых устройств является добыча со дна морей и океанов больших количеств руды, а именно сбор полиметаллических конкреций, находящихся на больших глубинах. Наряду с этим, предлагаемые устройства могут успешно применяться в любом месте мирового океана для инспектирования и подъема затонувших объектов, для проведения океанологических исследований и для других работ, осуществляемых на больших, вплоть до предельных, глубинах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛУБОКОВОДНЫЙ ОПУСКАЕМЫЙ АППАРАТ ПРЕДЕЛЬНЫХ ГЛУБИН | 2002 |
|
RU2203833C1 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| ГЛУБОКОВОДНЫЙ СПУСКАЕМЫЙ АППАРАТ | 1997 |
|
RU2121448C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ ДНА АКВАТОРИИ | 2020 |
|
RU2733565C1 |
| СПОСОБ ДОБЫЧИ ГАЗА В ОТКРЫТОМ МОРЕ | 1994 |
|
RU2078199C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| СУДОВОЙ КОМПЛЕКС И ОПУСКАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2262465C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ В ЛЕДОВЫХ УСЛОВИЯХ | 2013 |
|
RU2544045C1 |
Группа изобретений относится к области подводной техники для добычи россыпных полезных ископаемых со дна морей и океанов. Комплекс включает добычное судно, соединенное посредством спускоподъемного каната с поплавком, в котором смонтирован успокоитель качки, и к нему подвешен гидростат с собственным поплавком и обитаемой гондолой. К ней подсоединены бокс-гараж для дистанционно управляемого мобильного исследовательского модуля и бокс с источником электрической энергии для гондолы. К гидростату крепятся оснащенный манипулятором робот, грузовой контейнер и контейнер с аккумуляторами для питания робота. Он снабжен средствами регулирования плавучести с емкостью под легкую жидкость, перекачиваемую из поплавка гидростата по сматываемому шлангу. Комплекс снабжен волоконно-оптической системой связи. Назначение комплекса - сбор донных полиметаллических конкреций. Телеуправляемый подводный робот включает смонтированный на вертикально расположенном электроприводном барабане с возможностью вращения вместе с ним эластичный мешок, который соединен с намотанным на барабане шлангом для подачи в мешок легкой жидкости из внешней емкости, причем посредством шланга обеспечена механическая связь робота с управляющим объектом. Под барабаном смонтирован электроприводной манипулятор. Движители позиционирования выполнены в виде водометов, сопла которых, снабженные управляющими клапанами, по-разному ориентированы относительно горизонтально расположенной, кольцевой общей питающей камеры. Маршевый гребной винт смонтирован шарнирно для управления его положением. Разведывательно-навигационное оборудование включает сканирующий твердотельный лазер, телевизионный гидролокатор и цифровую видеокамеру, образующие в совокупности трехмерную телевизионную сканирующую систему. Робот имеет энергоснабжение от внешнего источника. Технический результат заключается в повышении эффективности и надежности работы глубоководного добычного комплекса и телеуправляемого подводного робота. 2 с. и 13 з.п. ф-лы, 7 ил.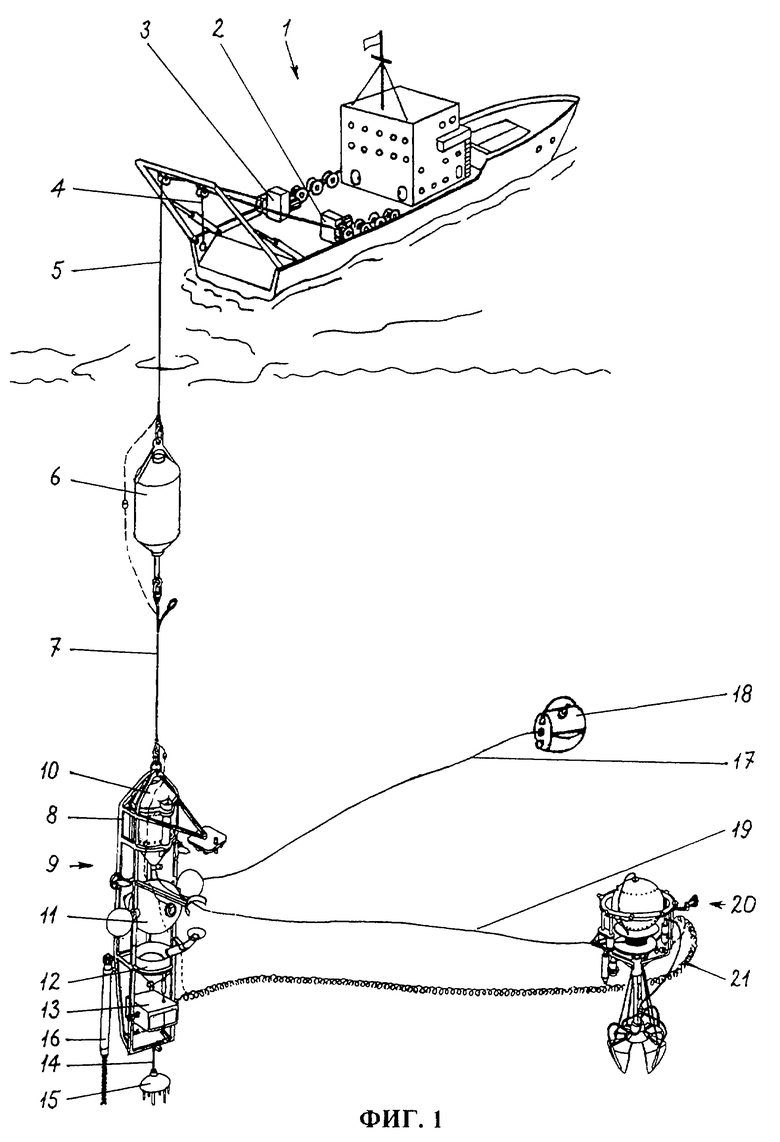
| SU 1351265 A1, 10.07.1996 | |||
| Подводный аппарат | 1988 |
|
SU1779634A1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА ОКЕАНА | 1990 |
|
SU1714991A1 |
| RU 2001276 C1, 15.10.1993 | |||
| КОМПЛЕКС ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНОГО ИСКОПАЕМОГО | 1999 |
|
RU2168633C2 |
| US 3572129 A, 23.03.1971 | |||
| СПОСОБ ПЛАСТИКИ ПРИ ОЛЕОГРАНУЛЕМЕ ПОЛОВОГО ЧЛЕНА | 2008 |
|
RU2376941C1 |
| DE 2950922 A1, 17.07.1980 | |||
| DE 4039473 A1, 17.06.1992. | |||

