Изобретение относится к области машиностроения, в частности к арматуростроению, а именно к регулирующей арматуре, и может быть использовано в нефтегазодобывающей и других отраслях промышленности. Система гидропривода предназначена для приведения в движение запорного органа арматуры эксплуатационной линии посредством гидравлической энергии, обеспечивая таким образом регулирование потока в заданных пределах.
Известен шаговый гидропривод по патенту US 2006192160 А1 (опубл. 31.08.2006), предназначенный для эксплуатации в системе эксплуатационной линии системы подводной добычи, при котором поступательное ступенчатое движение штока арматуры обеспечивается путем подачи дозированной порции рабочей жидкости в полость гидроцилиндра, обеспечивающего основное перемещение. Недостатками этого изобретения являются:
- отсутствие возможности фиксации штока арматуры в заданном положении при потере управляющего давления механическими средствами и как следствие возможность его самопроизвольного закрытия;
- нахождение элементов гидравлической схемы под давлением в процессе всего срока службы изделия;
- значительное количество гидравлических элементов (обратные клапаны и гидрозамки), склонных к засорению и утечкам, требующих дополнительных управляющих импульсов в процессе эксплуатации.
Известен гидропривод возвратно-поступательного движения (патент РФ 2586999, опубл. 10.06.2016 г.), конструкция которого позволяет преобразовать возвратно-поступательное движение корпуса гидроцилиндра с зубчатой рейкой во вращательное движение зубчатого колеса. Недостатком указанной конструкции является отсутствие механической фиксации заданных положений колеса и ограниченный ход движения, значительная зависимость габаритов изделия от длины хода арматуры, большая материалоемкость, а также сложность установки привода в требуемое промежуточное положение.
Наиболее близким по технической сущности является двухтактный шаговый гидравлический двигатель, описанный в учебно-методическом пособии «Дискретные гидроприводы» (Часть 1 - Принципы построения и область применения; Учебно-методическое пособие для студентов - Минск: БГПА, 2000; авт.: В.П. Автушко, П.Н. Кишкевич, М.И. Жилевич), в котором вращательное движение создается с помощью гидроцилиндров одностороннего действия, а фиксация вала осуществляется шариковыми фиксаторами. Недостатками данного привода является возможность самопроизвольного выхода цилиндров из начального положения при превышении давления в сливной линии над давлением окружающей среды (данная проблема является актуальной при значительной длине линии управления характерных для систем подводной добычи), гарантированное удержание гидроцилиндра описанными возвратными пружинами при этом является затруднительным из-за значительных габаритов пружин которые потребуются для осуществления требуемых ходов и усилий. В случае самопроизвольного выдвижения штока гидроцилиндра возможно изменение положения регулирующего элемента арматуры на один ход, либо заклинивание механизма полностью в случае если будет приведен в действие гидроцилиндр противоположный вышедшему.
Технический результат, достигаемый при осуществлении предлагаемого изобретения заключается в осуществлении дискретного углового перемещения выходного звена арматуры при сохранении габаритов, а также в увеличении надежности за счет минимизации количества примененного в схеме управления гидрооборудования и изменения кинематической схемы привода.
Указанный технический результат достигается тем, что в системе гидропривода регулирующей арматуры эксплуатационной линии, включающей два гидроцилиндра, приводящих в возвратно-поступательное движение каретки с храповиками, вращающие выходной вал привода посредством храповых колес, возвратные пружины кареток, шариковые фиксаторы положения, взаимодействующие с копиром, закрепленным на выходном валу привода, вал аварийного вращения привода от телеуправляемого необитаемого подводного аппарата (далее - ТИПА) со стаканом установки вращательного инструмента соосно соединенного с выходным валом,
согласно изобретению,
одно из храповых колес выполнено из двух частей, симметрично размещенных относительно оси штока;
привод каретки осуществляется двухштоковым гидроцилиндром двустороннего действия с пружиной, расположенной в штоковой полости со стороны каретки;
штоки гидроцилиндра имеют отличные диаметры, при этом шток, не входящий во взаимодействие с кареткой, имеет больший диаметр и соединен с корпусом привода, заполненным гидравлической жидкостью.
Храповое колесо обеспечивает поворот вала в одну из сторон, а его конструктивное исполнение, когда две его части симметрично расположены относительно оси гидроцилиндра, позволяет минимизировать габариты изделия за счет установки гидроцилиндров в одной плоскости и устранить боковые нагрузки на гидроцилиндр. Использование двухштоковых гидроцилиндров двустороннего действия с пружиной, расположенной в штоковой полости позволяет эффективно осуществлять возврат штоков в исходное положение и противодействовать их самопроизвольному выдвижению. Наличие второго штока большего диаметра, соединенного с корпусом привода заполненным гидравлической жидкостью, позволяет уменьшить эффективную рабочую площадь гидроцилиндра, которая может создавать противодавление и противодействовать возврату гидроцилиндров в исходное положение.
Система гидропривода регулирующей арматуры эксплуатационной линии имеет механические шариковые фиксаторы выходного вала и механической передачи, состоящей из храповых колес и храповиков в подвижных каретках, которые позволяют фиксировать каждое рабочее положение храпового колеса, при этом ход движения штока ограничивается только его длиной резьбовой части.
Также к преимуществам предлагаемого устройства можно отнести отсутствие гидравлических компонентов, находящихся под давлением (кроме периодов переключения), что позволяет снизить усталостные напряжения и увеличить долговечность работы.
Предлагаемое изобретение иллюстрируется чертежами, на которых:
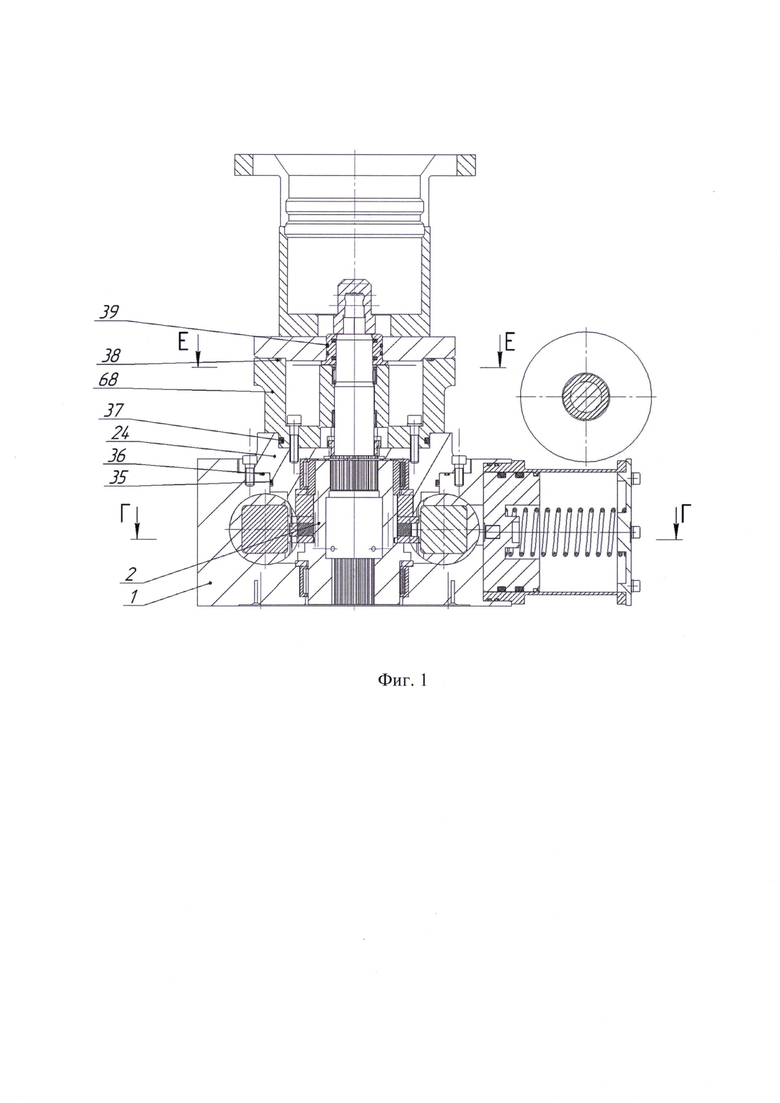
на фиг. 1 показано внутреннее устройство системы гидропривода регулирующей арматуры эксплуатационной линии (разрез по выходному валу в поперечной плоскости);
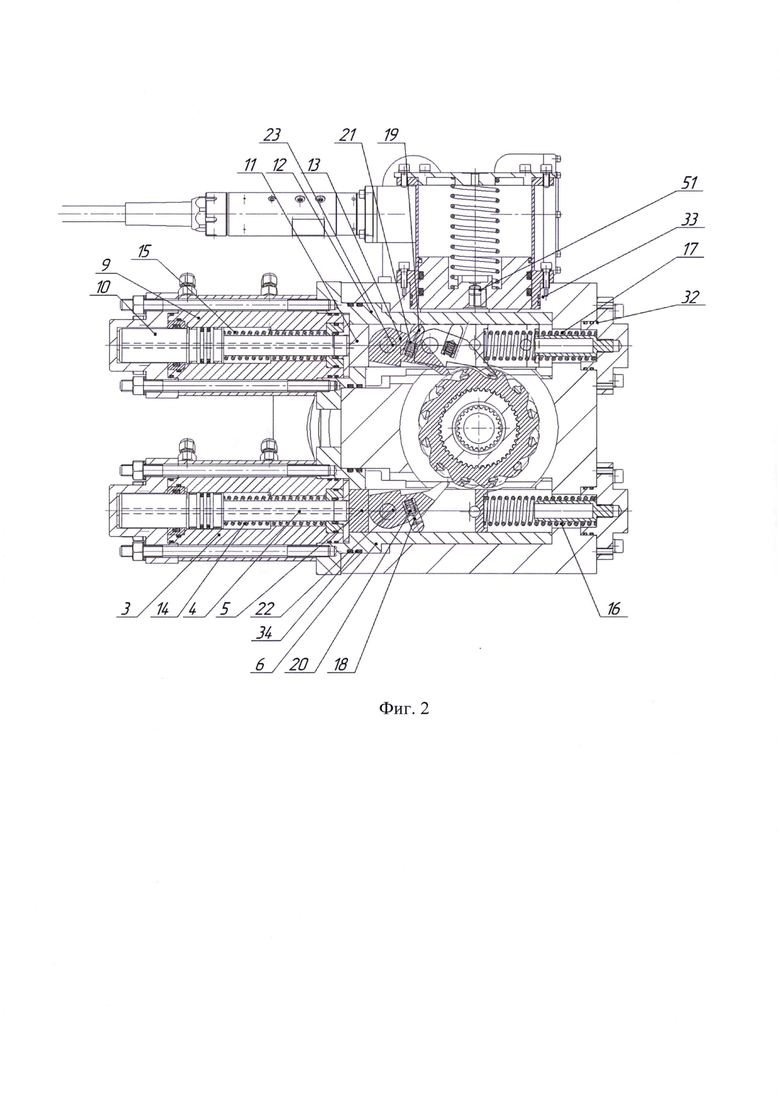
на фиг. 2 показано внутреннее устройство в плоскости гидроцилиндров с каретками и храповым колесом и гидрокомпенсатором при вращении выходного вала по часовой стрелке;
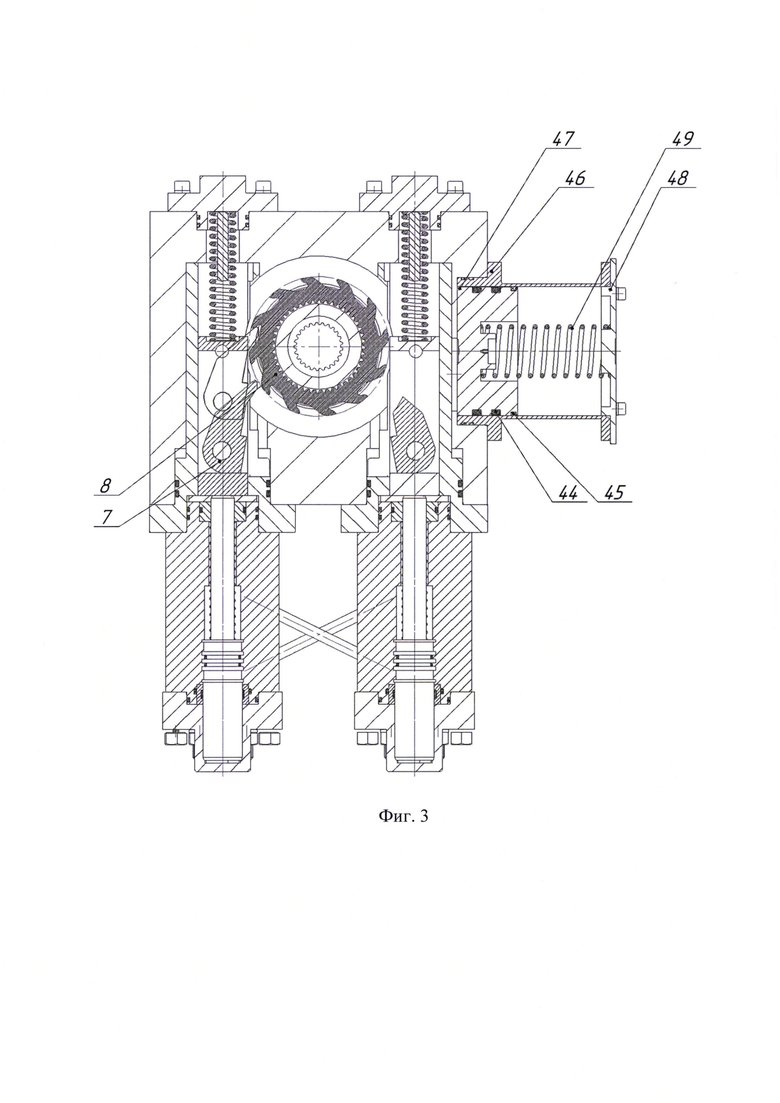
на фиг. 3 показано внутреннее устройство в плоскости гидроцилиндров с каретками и храповым колесом при вращении выходного вала против часовой стрелки;
на фиг. 4 показан привод указателя с цилиндрическими передачами и планетарно-цевочным редуктором;
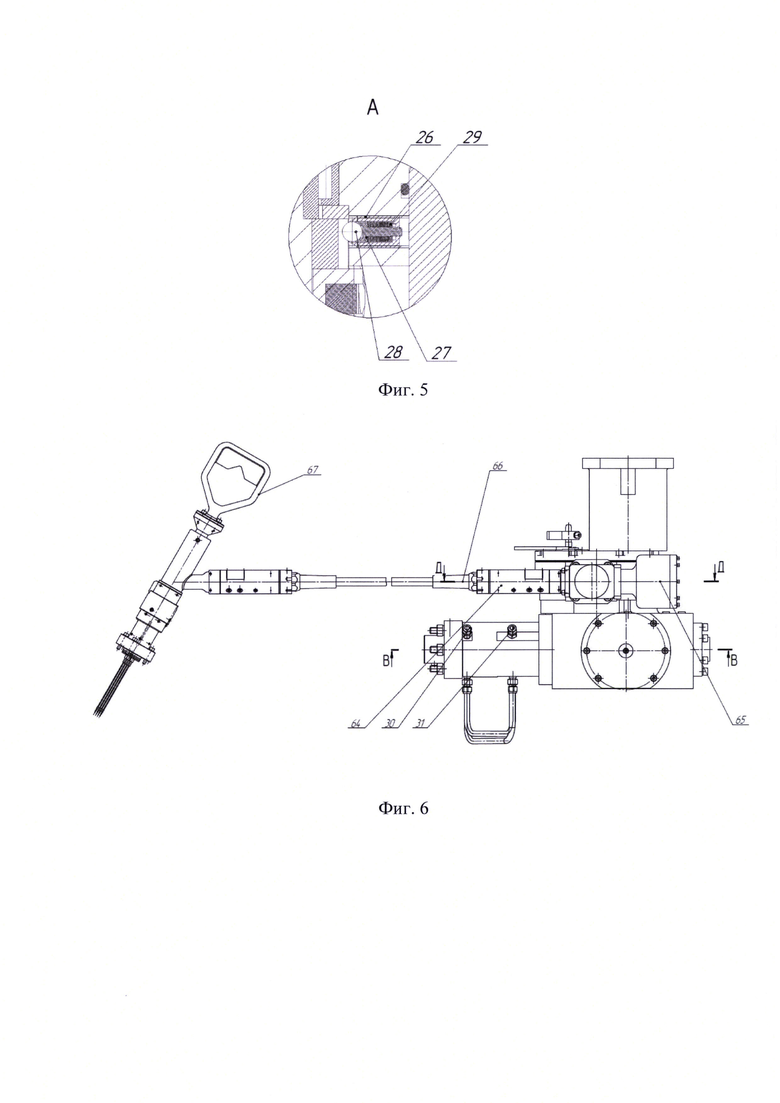
на фиг. 5 устройство шарикового фиксатора (увеличено);
на фиг. 6 показан внешний вид системы гидропривода регулирующей арматуры эксплуатационной линии (сбоку);
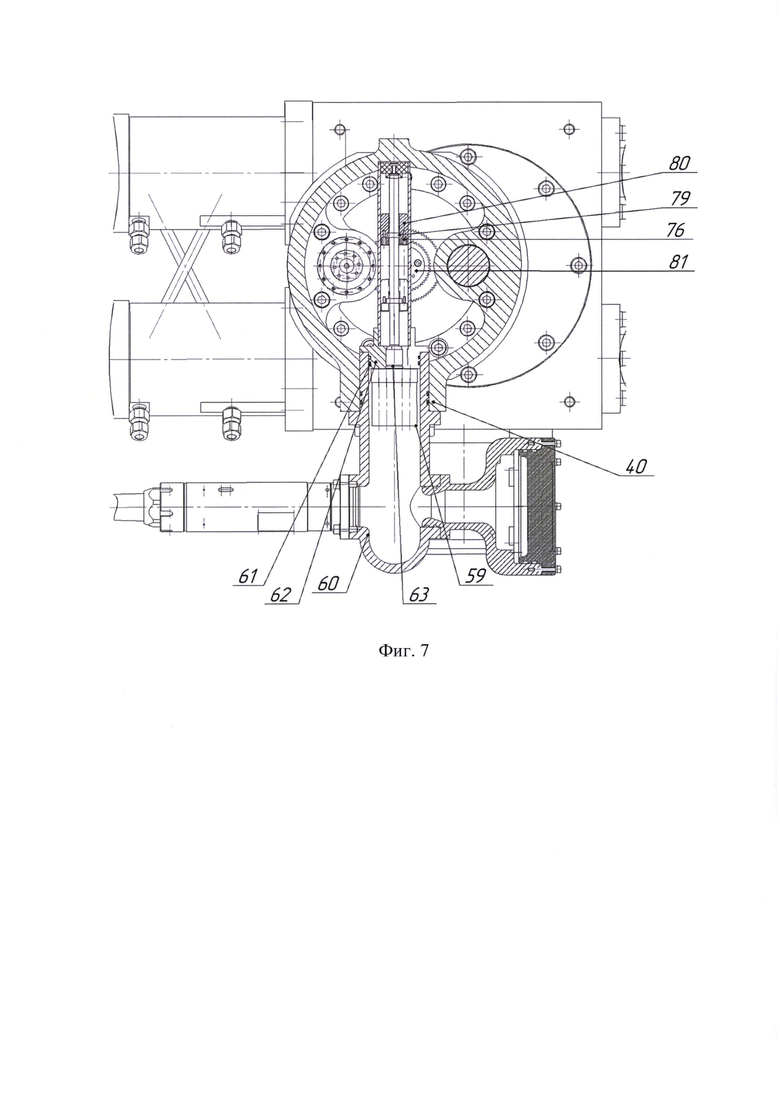
на фиг. 7 показан разрез по оси датчика положения с подвижным чувствительным элементом;
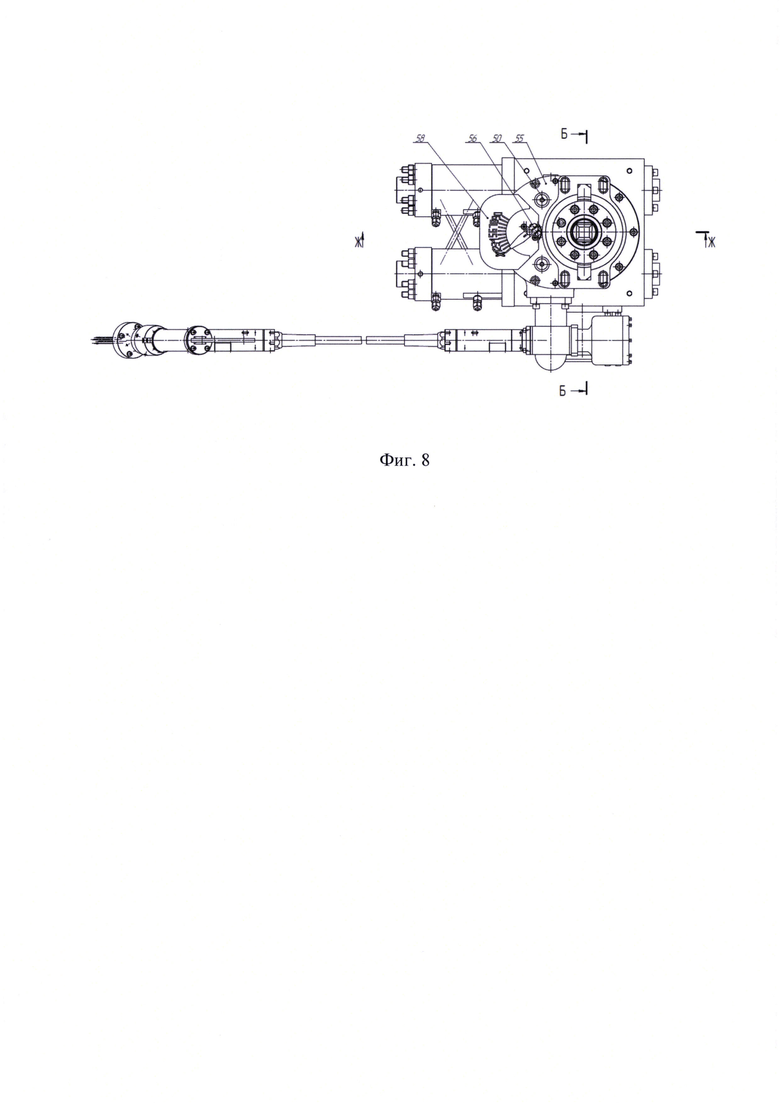
на фиг. 8 показан внешний вид системы гидропривода регулирующей арматуры эксплуатационной линии (сверху).
Устройство работает следующим образом. Система гидропривода регулирующей арматуры эксплуатационной линии крепится к верхней плоскости корпуса регулирующей арматуры посредством фланцевого соединения с использованием болтов или шпилек с гайками размещенного на привалочной плоскости А корпуса 1 (фиг. 1). Передача крутящего момента на арматуру осуществляется валом 2 через эвольвентные шлицы в нижней части вала.
Исполнение механизма - вертикальное, неизвлекаемое.
Привод осуществляет перемещение запорного органа арматуры путем вращения выходного вала. Вращение выходного вала против часовой стрелки осуществляется пошагово с углом поворота выходного вала на 30 градусов за один ход приводного гидроцилиндра 3 (фиг. 2). При подаче давления в штоковую полость цилиндра происходит выдвижение штока 4. Шток, в свою очередь, толкает каретку 5, расположенную в направляющей гильзе 6. В каретке 5 расположена подпружиненная собачка 7 (фиг. 3), осуществляющая взаимодействие с храповым колесом 8 закрепленным на валу 2.
Вращение выходного вала по часовой стрелке осуществляется пошагово с углом поворота выходного вала на 30 градусов за один ход приводного гидроцилиндра 9 (фиг. 2). При подаче давления в штоковую полость цилиндра происходит выдвижение штока 10. Шток, в свою очередь, толкает каретку 11, расположенную в направляющей гильзе 12. В каретке 11 расположена подпружиненная собачка 13, осуществляющая взаимодействие с храповым колесом 9, закрепленным на валу 2.
При сбросе давления из рабочей полости гидроцилиндров 3 и 9 штоки 4 и 10 возвращаются в исходное положение путем разжатия пружин 14 и 15, 16 и 17. Собачки 7 и 13 при этом двигаются по храповому колесу и возвращаются в исходное угловое положение за счет толкателей 18 и 19, подпружиненных пружинами 20 и 21. Особенностью механизма является то, что при прямом ходе каретки собачка упирается плоской гранью и передает усилие на каретку и шток, а при обратном ходе имеет возможность поворота вокруг оси 22 и 23. Другой особенностью механизма является применение двухштокового цилиндра, позволяющее уменьшить маневровый объем компенсирующей жидкости в корпусе.
Для фиксации углового положения вала 2 при снятии управляющего давления с гидроцилиндров 3 и 9 используются шариковые фиксаторы, радиально, расположенные в промежуточной крышке 24 и взаимодействующие с копиром 25 (фиг. 4), зафиксированным на валу 2, состоящие из корпуса 26, упора 27 и шарика 28 (фиг. 5). Осевое усилие, создающее фиксирующий момент создается пакетом тарельчатых пружин 29. Регулировка момента осуществляется за счет перемещения корпусов фиксатора по резьбе в промежуточной крышке.
Подача гидравлической жидкости на гидроцилиндры осуществляется через порты 30, 31 (фиг. 6).
Герметичность корпуса привода осуществляется за счет статических уплотнений 32-41, вращаюшихся уплотнений 42, 43, подвижных уплотнений 44, дополнительно защищенных грязесъемниками 45 (фиг. 7, 4).
Компенсация по давлению осуществляется за счет применения пружинного компенсатора объема, состоящего из гильзы 46, поршня 47, крышки 48, пружины 49 (фиг. 3). При повышении давления внутри корпуса вследствие прямого рабочего хода или повышения температуры поршень сжимает пружину 49, при понижении давления под действием предварительного сжатия пружины вследствие обратного рабочего хода пружины или понижения температуры поршень перемещается в сторону уменьшения внутреннего объема. Первоначальное давление поршня задается при заливке компенсирующей жидкости.
Заливка компенсирующей жидкости осуществляется через пробки 50, одна из которых используется для заливки, другая для выпуска воздуха из полостей привода.
Для защиты от превышения внутрикорпусного давления более, чем на 1 бар в приводе предусмотрен обратно-предохранительный клапан 51 установленный в поршне 47, осуществляющий сброс жидкости в окружающую среду.
Привод снабжен системой механического дублирования (ручного дублера), управляемого при помощи вращательного инструмента ТИПА устанавливаемого в стакан 52 и взаимодействующего с ключом 53 (фиг. 4). Ключ 53 зафиксирован на валу 54, который напрямую может вращать вал 2. На верхней крышке 55 в непосредственной близости от стакана 52 расположен указатель положения часового типа, реализованный в виде флажка 56 вращающегося на оси 57. Чтение показаний осуществляется по табличке 58 градуированной в процентах открытия арматуры (фиг. 8).
Помимо визуальной индикации в приводе предусмотрен датчик положения выходного звена на основе LVDT 59 размещенный в герметичном корпусе, образованном корпусом датчика 60, и крышкой 61. Герметичность корпусных элементов обеспечивается наличием статических уплотнений 62, 63. Так же на корпусе датчика размещена розетка электрического соединителя 64 и блок преобразователя сигналов датчика в информационные сигналы для системы управления 65. В качестве ответной части используется стойкий к гидробарическому давлению кабель 66, оснащенный разъемом и позволяющий осуществить подводную стыковку. Дополнительно разъем имеет ручку для захвата кабеля при помощи ТНПА 67.
Для обеспечения привода указателя от вращения выходного вала и работы датчика положения в корпусном элементе 68 реализована паразитная кинематическая цепь, от венцовой шестерни 69 закрепленной на валу 54. Шестерня 69 приводит во вращение сдвоенную шестерню, состоящую из шестерен 70, 71 вращающихся на оси 72, а затем шестерню 73 установленную на оси 74, которая в свою очередь приводит в движение планетарно-цевочный редуктор 75, на выходе которого установлена ось 57. Для реализации работы датчика положения угловое положение оси 57 преобразуется в линейное перемещение ползуна 76, посредством коромысла 77 закрепленного на оси 57 и пальца 78 закрепленного на ползуне 76. Датчик положения выполнен на основе метода LVDT в герметичном корпусе и выполняет функцию отправки данных о положении запорного органа арматуры в систему управления устройством.
Принцип работы датчика перемещения основан на линейном перемещении магнита 79 вдоль чувствительного элемента датчика. В рамках данной конструкции магнит 79 расположен в ползуне 76 и аксиально зафиксирован крышкой 80. Соосность ползуна относительно чувствительного элемента обеспечивается путем установки ползуна в гильзу 81.
Таким образом, предлагаемая конструкция системы гидропривода регулирующей арматуры эксплуатационной линии позволяет осуществлять дискретное угловое перемещение выходного звена арматуры при сохранении габаритов за счет расположения гидроцилиндров, кареток и храповых колес в одной плоскости и фиксаторов интегрированных в промежуточную крышку, а также увеличивает надежность устройства за счет минимизации количества гидравлического оборудования, примененного в схеме управления и изменения кинематической схемы привода.
Кроме того, исключение возможности самопроизвольного перемещения управляющих элементов, как внутри механизма гидропривода, так и выходного звена, повышает исправность работы системы гидроприводов, а уменьшение габаритов механизма за счет преобразования линейного движения во вращательное со значительным редуцированием, позволяет встраивать ее в существующие и перспективные конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД НАСОСНОЙ СКВАЖИННОЙ УСТАНОВКИ | 2022 |
|
RU2793863C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| ПРИВОД ГИДРАВЛИЧЕСКИЙ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2020 |
|
RU2736159C1 |
| ПРИБОР ДЛЯ ОЦЕНКИ РОВНОСТИ ДОРОЖНЫХ ПОКРЫТИЙ | 1997 |
|
RU2136805C1 |
| Шаровой кран с гидроприводом | 2018 |
|
RU2692851C1 |
| ПРИВОД ГИДРАВЛИЧЕСКИЙ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2020 |
|
RU2737568C1 |
| Контактор переключающего устрой-CTBA | 1977 |
|
SU813519A1 |
| Гидравлический привод с рекуперацией энергии торможения | 1978 |
|
SU738920A1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |

Изобретение относится к области машиностроения, в частности к арматуростроению, а именно к регулирующей арматуре, и может быть использовано в нефтегазодобывающей промышленности. Система гидропривода регулирующей арматуры эксплуатационной линии, включающая два гидроцилиндра, приводящих в возвратно-поступательное движение каретки с храповиками, вращающими выходной вал привода посредством храповых колес, возвратные пружины кареток, шариковые фиксаторы положения, взаимодействующие с копиром, закрепленным на выходном валу привода, вал аварийного вращения привода от телеуправляемого необитаемого подводного аппарата со стаканом установки вращательного инструмента, соосно соединенного с выходным валом, причем одно из храповых колес выполнено из двух частей, симметрично размещенных относительно оси штока, привод каретки осуществляется двухштоковым гидроцилиндром двустороннего действия с пружиной, расположенной в штоковой полости со стороны каретки, штока гидроцилиндра имеют отличные диаметры, при этом шток, не входящий во взаимодействие с кареткой, имеет больший диаметр и соединен с корпусом привода, заполненным гидравлической жидкостью. Техническим результатом изобретения является осуществление дискретного углового перемещения выходного звена арматуры при сохранении габаритов, а также увеличение надежности за счет минимизации количества примененного в схеме управления гидрооборудования и изменения кинематической схемы привода. 3 з.п. ф-лы, 8 ил.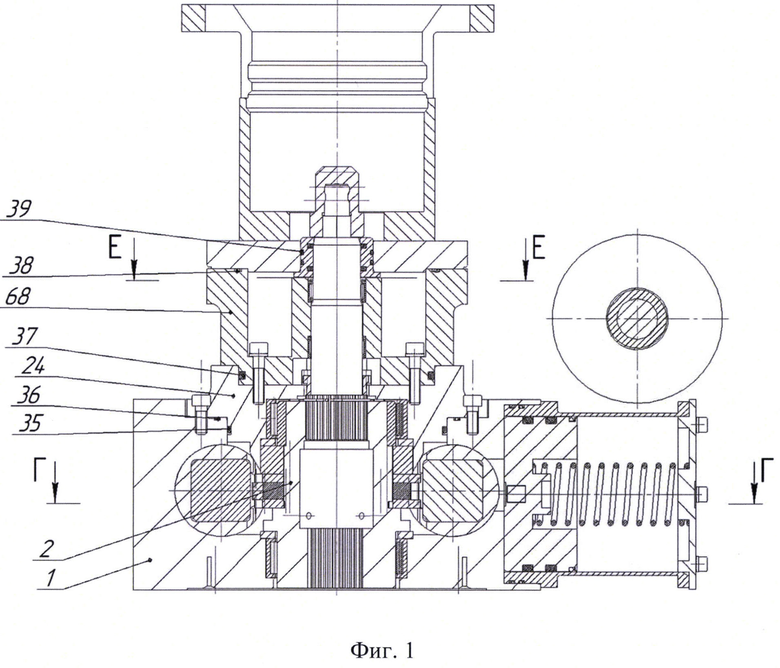
1. Система гидропривода регулирующей арматуры эксплуатационной линии, включающая два гидроцилиндра, приводящих в возвратно-поступательное движение каретки с храповиками, вращающие выходной вал привода посредством храповых колес, возвратные пружины кареток, шариковые фиксаторы положения, взаимодействующие с копиром, закрепленным на выходном валу привода, вал аварийного вращения привода от телеуправляемого необитаемого подводного аппарата (далее - ТНПА) со стаканом установки вращательного инструмента, соосно соединенного с выходным валом, отличающаяся тем, что
одно из храповых колес выполнено из двух частей, симметрично размещенных относительно оси штока;
привод каретки осуществляется двухштоковым гидроцилиндром двустороннего действия с пружиной, расположенной в штоковой полости со стороны каретки;
штоки гидроцилиндра имеют отличные диаметры, при этом шток, не входящий во взаимодействие с кареткой, имеет больший диаметр и соединен с корпусом привода, заполненным гидравлической жидкостью.
2. Система гидропривода регулирующей арматуры эксплуатационной линии по п. 1, отличающаяся тем, что содержит датчик положения запорного органа арматуры в герметичном корпусе.
3. Система гидропривода регулирующей арматуры эксплуатационной линии по п. 1, отличающаяся тем, что кинематическая цепь привода датчика состоит из двух цилиндрических передач и планетарно-цевочного редуктора, на выходной оси которого размещено коромысло, двигающее сборку подвижного элемента датчика относительно неподвижной части датчика.
4. Система гидропривода регулирующей арматуры эксплуатационной линии по п. 1, отличающаяся тем, что содержит пружинный компенсатор объема давления между корпусными элементами и наружной средой.
| ПРИВОД ГИДРАВЛИЧЕСКИЙ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ | 2020 |
|
RU2737568C1 |
| Устройство для запоминания экстремальных электрических сигналов датчиков | 1961 |
|
SU147329A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРАВНОВЕШЕННОСТИ И ОПТИМАЛЬНОГО ПОЛОЖЕНИЯ ПРОТИВОВЕСА ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКИ | 2017 |
|
RU2686787C1 |
| US 10047739 B2, 14.08.2018 | |||
| US 5006044 A1, 09.04.1991. | |||

