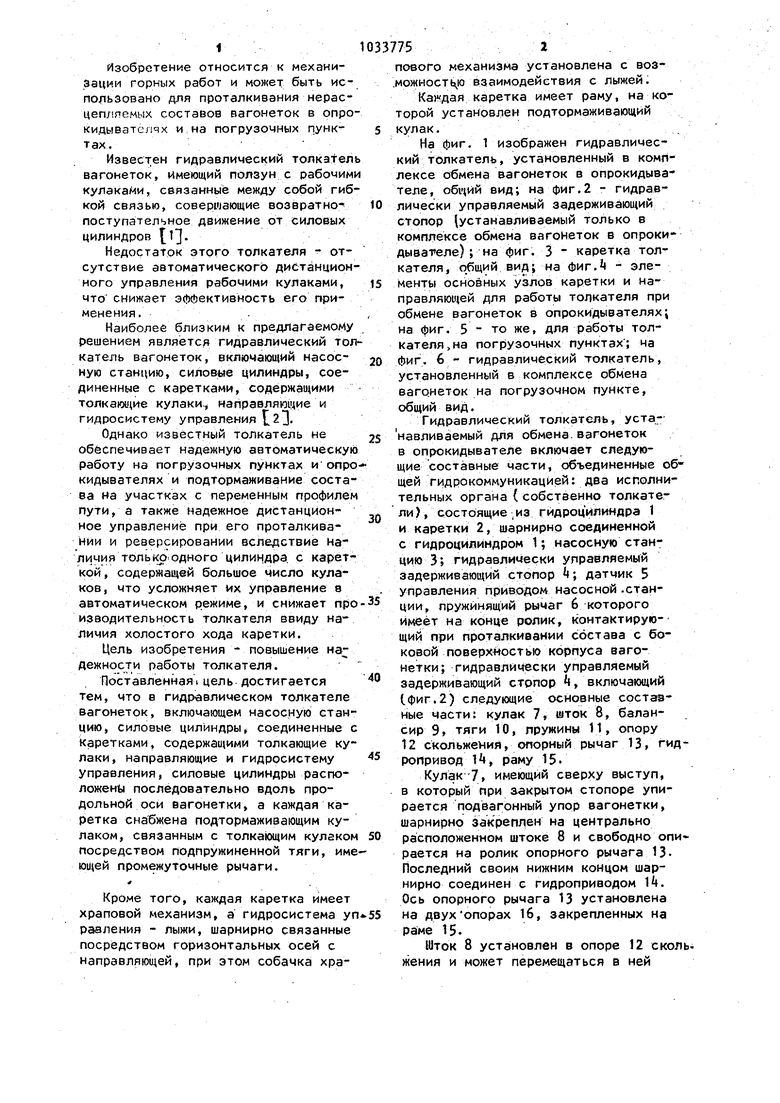
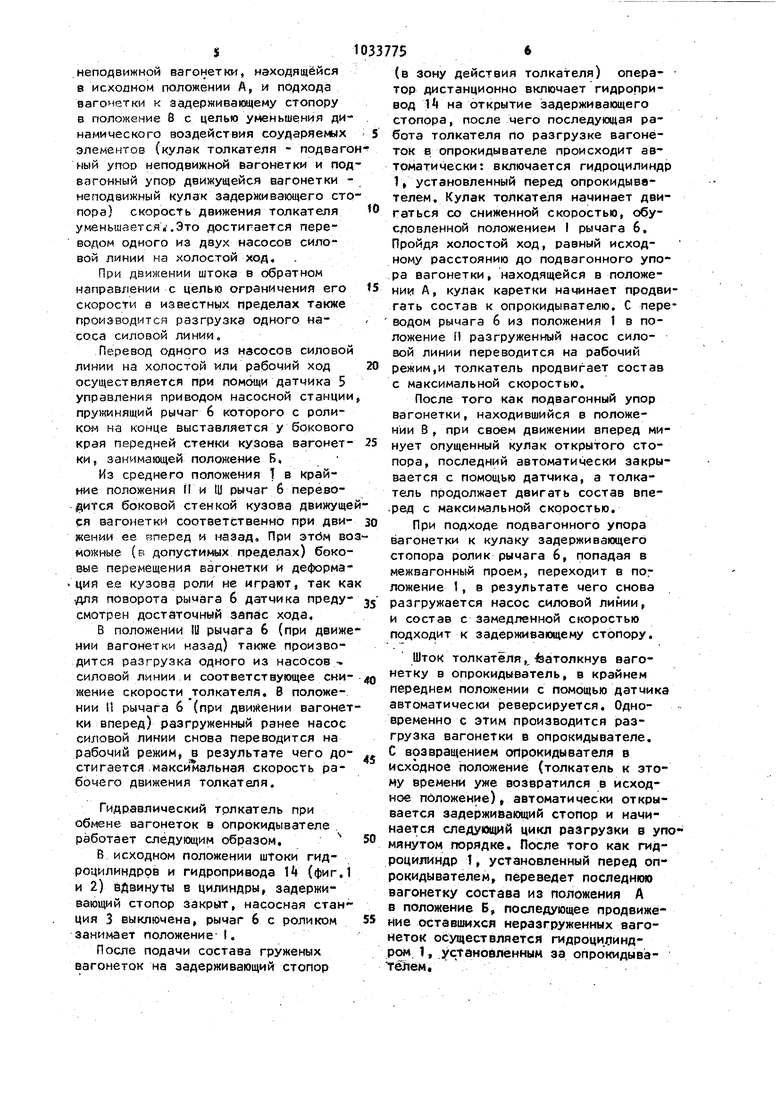
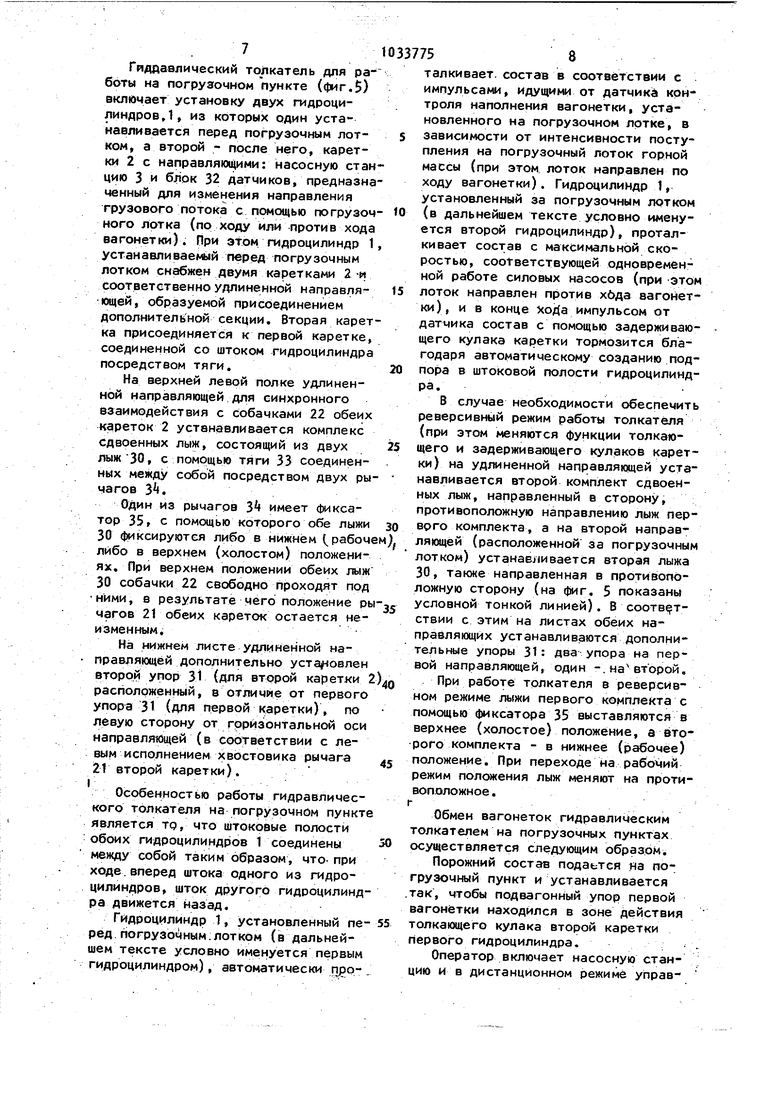
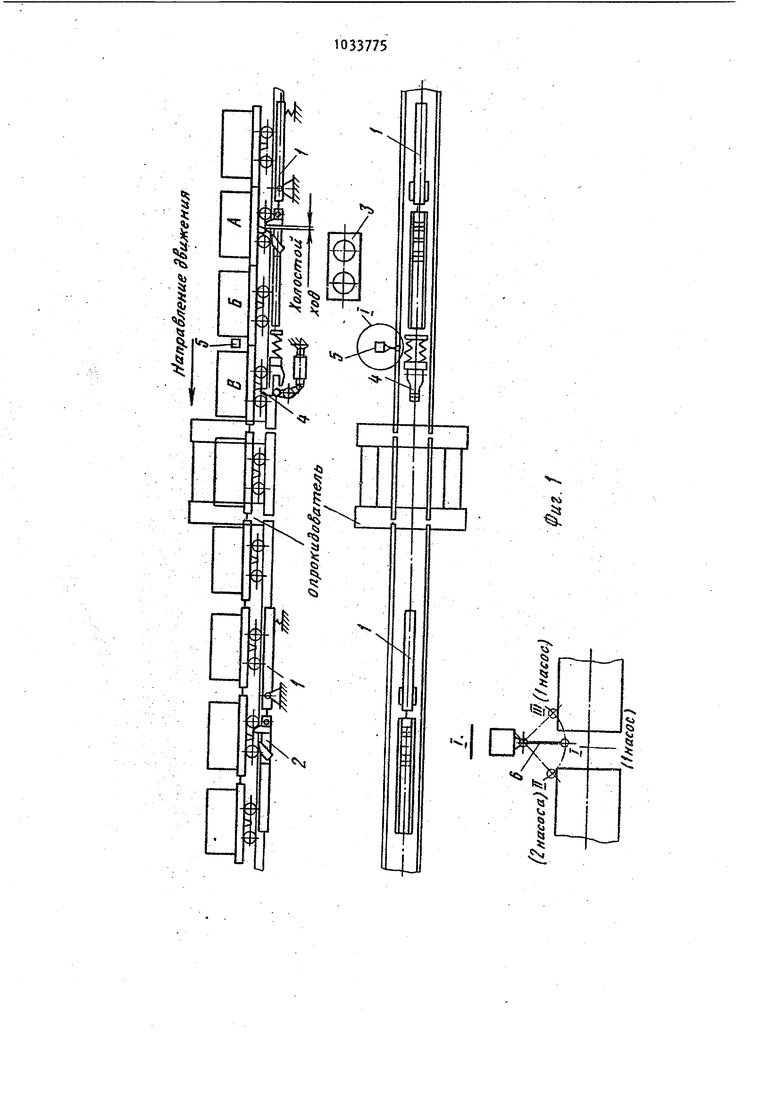
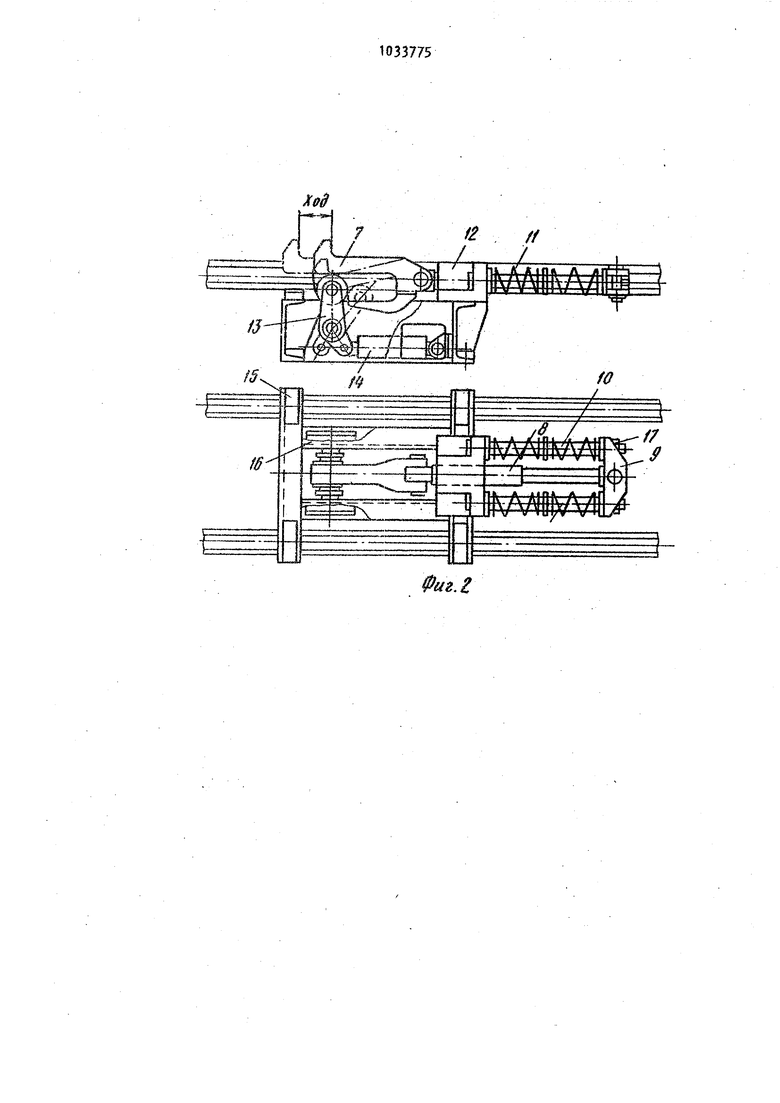
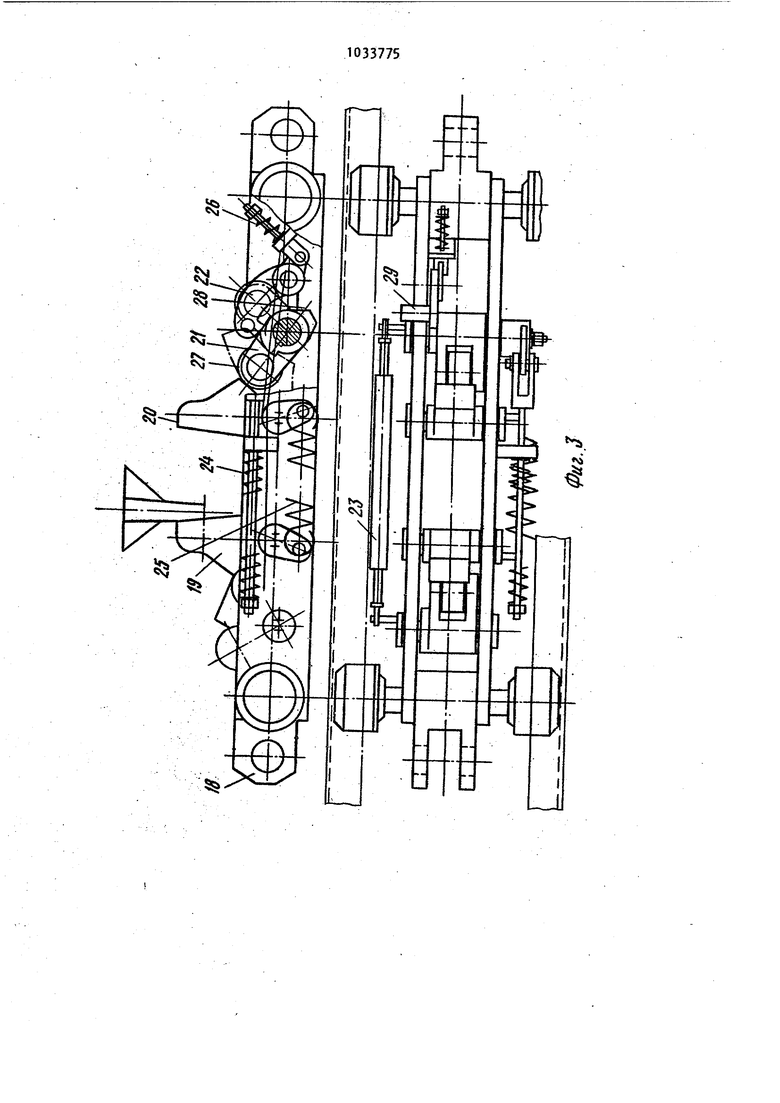
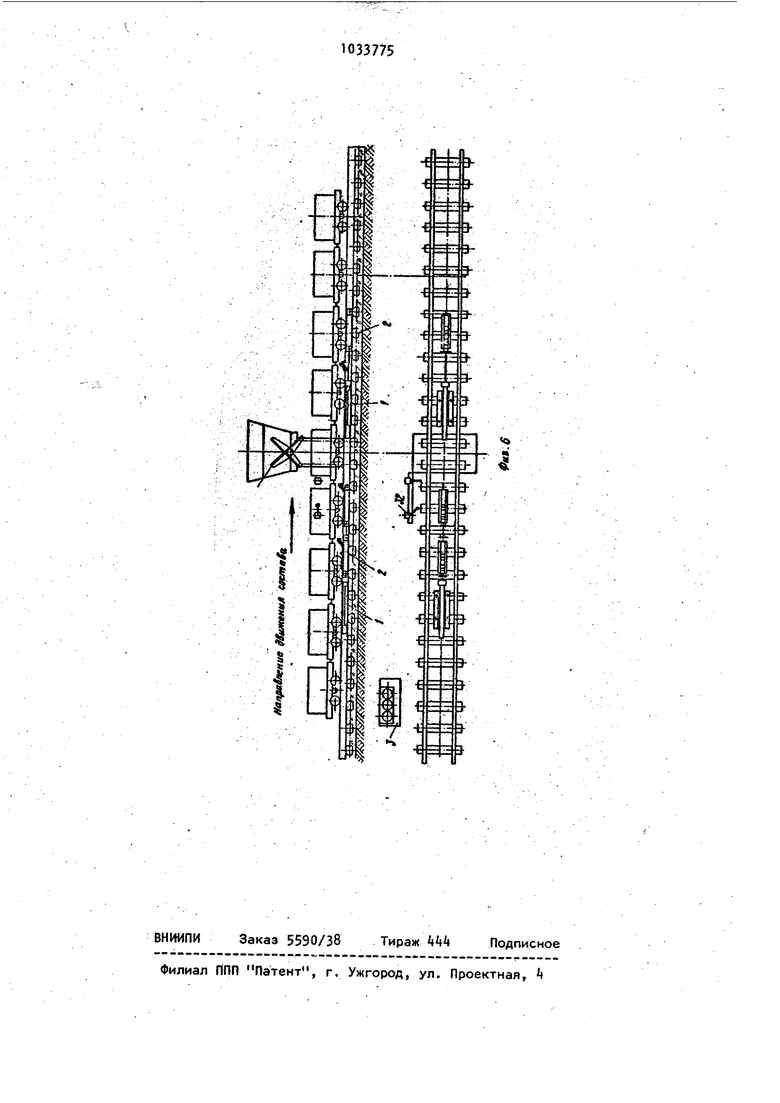
изобретение относится к механизации горных работ и может быть использовано для проталкивания нерасцеплпемых составов вагонеток в опро кидьшатеячх и на погрузочных Г ункTax. Известен гидравлический толкател вагонеток, имеющий ползун с рабочим кулакайи, связанные между собой гиб кой связью, совершающие возвратнопоступательное движение от силовых цилиндров {ЗНедостаток этого толкателя - отсутствие автоматического дистанцион ного управления рабочими кулаками, что снижает эффективность его применения,. Наиболее близким к предлагйемому решением является гидравлический тол катель вагонеток, включающий насосную станцию, силовые цилиндры, соединенные с каретками, содержащими толкаю1цие кулаки, направляющие и гидросистему управления 2 3. Однако известный толкатель не обеспечивает надежную автоматическую работу на погрузочных пунктах и опро кидывателях и подтормаживание состава на участках с переменным профилем пути, а также надежное дистанционное управление при его проталкивании и реверсировании вследствие Иа личия тольш одного цилиндра, с кареткой, содержащей большое число кулаков, что усложняет их управление в автоматическом режиме, и снижает п|эо изводительность толкателя ввиду наличия холостого хода каретки. Цель изобретения - повышение надежности работы толкателя. Поставленная цель достигается тем, что в гидравлическом толкателе вагонеток, включающем насосную станцию, силовые цилиндры, соединенные с Каретками, содержащими толкающие кулаки, направляющие и гидросистему управления, силовые цилиндры расположена последовательно вдоль продольной оси вагонетки, а каждая каретка снабжена подтормаживающим кулаком, связанным с толка1ощим кулаком посредством подпружиненной тяги, име ющей промежуточные рычаги. Кроме того, каждая каретка имеет храповой механизм, а гидросистема уп рааления - лыжи, шарнирно связанные посредством горизонтальных осей с направляющей, при этом собачка храпового механизма установлена с возможностцю взаимодействия с лыжей. Каждая каретка имеет раму, на которой установлен подтормаживающий кулак. На фиг. 1 изображен гидравлический толкатель, установленный в комплексе обмена вагонеток в опрокидывателе, общий вид; на фиг.2 - гидравлически управляемь1Й задерживающий стопор (устанавливаемый только в комплексе обмена вагонеток в опрокидывателе) ; на фиг. 3 каретка толкателя, о.бщий вид; на фиг. - элементы основных узлов каретки и направляющей для работы толкателя при обмене вагонеток в опрокидывателях; на фиг. 5 - то же, для работы толкателя на погрузочных пунктах; ча фиг. 6 - гидравлический толкатель, установленный в комплексе обмена вагонеток на погрузочном пункте, общий вид. Гидравлический толкатель, устанавливаемый для обмена.вагонеток в опрокидывателе включает следующие составные части, объединенные общей гидрокоммуникацией: два исполнительных органа (собственно толкатели), состоящие из гйдроцйлиндра 1 и каретки 2, шарнирно соединенной с гидроцияимдром 1; насосную станцию 3; гидравлически управляемый задерживающий стопор ; датчик 5 управления приводом насосной.станции, пружинящий рычаг 6 которого имеет на конце ролик, контактирующий при проталкивании состава с боковой поверхностью корпуса вагонетки; гидравлически управляемый задерживающий стопор , включающий (фиг.2) следующие основные составные части: кулак 7, шток 8, балансир 9, тяги 10, пружины 11, опору 12 скольжения, опорный рычаг 13, гидропривод I раму 15. Кулак7, имеющий сверху выступ, в который при закрытом стопоре упирается подвагонный упор вагонетки, шарнирно закреплен на центрально расположенном штоке 8 и свободна опирается на ролик опорного рычага 13. Последний своим нижним концом шарнирно соединен с гидроприводом И. Ось опорного рычага 13 установлена на двухопорах 16, закрепленных на раме 15. Шток 8 установлен в опоре 12 скольжения и может перемещаться в ней вдоль своей оси. Вторым своим концом аток 8 шарнирно соединен с бала сиром 9, концы которого соединены с пружинящими тягами 10.,Под действием пружин 11, предназначенных для аммортизации удара, приходящегося н кулак 7 со стороны подвагонного упо ра, тяги 10 торцами головок упирают ся в опору 12 и при сжатии пружин в время соударения кулака 7 с подвагон ным упором перемещаются в опоре 12 скольжения- вдоль своей оси вместе с штоком 8. Регулировка предварительного под тия пружин 11 осуществляется при по мощи двух гаек 17. При срабатывании гидропривода 14 с целью открывания стопора шток выд вигается и поворачивает опорный рычаг 13, ролик которогоJ упира;ясь в нижнюю съемную опору, крепящуюся на болтах к кулаку 7, повврачивает пос ледний вниз. . . Каретка 2 (-фиг. 1) ,шарнирно соединенная со штоком гидррцилиндра 1., включает следующие с сновные составные части (фиг, корпус 18, толка ющий 19 и подтормаживающий 20 кулаки, промежуточные рычаги 21, собачк 22, тягу 23, ПРУЖИНЫ . Корпус 18 на одном конце имеет вилку, с помощью которой каретка присоединяется к штоку гидроцилиндра, н другом-проушйну, предусмотренную для присоединения второй каретки ( при работе толкателя на погрузочном пункте). Два кулака 19 и 20, из один (левь1Й 19 служит для проталкивания состава, а другой 20 - для удержания состава ( и принеобходимости - реверсирования его;, находясь под действием общей пружины 25 В рабочем положении опираются наролики 27 промежуточных рычагов 21, ступиц которых имееют сверху зуб, а снизу хвостовик. Промежуточные рычаги 21 закреплены на шпонках на осях, соединенных междусобой посредством кривошипов о&цей тягой 23 Под действием пружины 24 промежуточные рычаги 21 стремятся повернуться в крайнее положение, при котором хвостовик рычага упирается в упор 28. В этом положении оба кулака 19 и 20 упираются на |эолики 27 промежуточных рычагов 21. Толкающие кулаки 19 поворачиваются в одном направлении, промежуточные рычаги 21 не .препятствуют их повороту в .противоположном направлении для свободного прохода под вагонеткой. Собачка 22, свободно сидящая на оси, в верхней части имеет выступающий за корпус каретки палец 29 в ис ходном положении каретки под действием Пружины 2б прижимается своим зубом к ступице промежуточного рычага 20.- . На верхней полке левого швеллера направляющей фигД) установлена лыжа 30, предназначенная для взаимодействия с собачкой 22, в результате чего происходит вбсстановление кулаков 19 в рабочее положение. На нижнем листе направляющей крепится Упор 31, предназначенный для отклонения промежуточных рычагов 21 в конце рабочего хода толкателя. При вагонеток в опрокидывателе каретка работает следующим Обрс13бм. В исходном положении шток полностью вдвинут в гидроцилиндр, оба рычага 2J отведены, один из них зафиксирован собачкой 22, оба кулака 19 и 20 под действием пружины 25 предельно опущены. При движении каретки вперед собачка 22, наезжая пальцем 2§ на лыжу 30, освобождает от зацепления зуб рычага 21, в результате чего оба отборных рычага под действием пружины 24 поворачиваются до тех пор, пока хвостовик правого опорного рычага не упрется в упор 28. Поворачиваясь, рычаги восстанавливают оба кулачка 19 V 20 в рабочее положение и подпирают их. Проталкивая состав на длину вагонет, каретка в конце рабочего хода толкателя подходит к упору 31, который, воздействуя на хвостовик рычага 21, поворачивает его, и собачка 22 фиксирует рычаги 21 в повернутом положении. ; При этом кулаки 19 и 20, освобо.дившись от опоры, опускаются под действием пружины 25 в крайнее нижнее положение, при котором они мо,гут свободно проходить под подвагонным упором вагонетки при возвращении каретки в исходное положение, после чего цикл повторяется. . На двух участках: подхода кулака толкателя к подвагонному упору
.неподвижной вагонетки, находящейся в исходном положении А, м подхода вагонетки к задерживающему стопору в положение 6 с целью уменьшения динамического воздействия соударчеммх элементов (кулак толкателя - подвагон ный ynoD неподвижной вагонетки и подвагонный упор движущейся вагонетки неподвижный кулак задерживающего стопора) скорость движения толкателя уменьшается.Это достигается переводом одного из двух насосов силовой линии на холостой ход, .
При движении штока в обратном направлении с целью ограничений его скорости 8 известных пределах также производится разгрузка одного иасоса силовой линии.
Перевод одного из нзсосов силовой линии на холостой или рабочий ход осуществляется при помощи датчика 5 управления приводом насосной станции, пружинящий рычаг 6 которого с ролиKOi- на конце выставляется у бокового края передней стенки кузова вагонетки, занимающей положение Б.
Из среднего положения Т в крайние положения {Г и Ш рычаг 6 переводится боковой стенкой кузова движущейся вагонетки соответственно при движенИИ ее вперед и назад. При этбм возможные (в допустимых пределах) боковые перемещения вагонетки и де(}юрмация ее кузова роли не играют, так как тДля поворота рымага б датчика предусмотрен достаточный запас хода.
В положении Ш рычага 6 (при движении вагонетки назад) также производится разгрузка одного из насосов -. силовой линии и соответствующее сиижение скорости толкателя. В положении И рычага 6 (при движении вагонетки вперед) разгруженный ранее насос силовой линии снова переводится на рабочий режим, в результате чего достигается максимальная скорость рабочего движения толкателя.
Гидравлический толкатель при обмене вагонеток в опрокидывателе . работает следующим образом,
В исходном положении шТоки гидроцилиндров и гидропривода И (фиг,1 и 2) вдвинуты в цилиндрыJ задерживающий стопор закрыт, насосная станция 3 выключена, рычаг 6 с роликом занимает положение- t.
После подачи состава груженых вагонеток на задерживающий стопор
(в зону действия толкателя) оператор дистанционно включает гидропривод 14 на открытие задерживащего стопора, после чего последующая работа толкателя по разгрузке вагонеток в опрокидывателе происходит автоматически: включается гидроцилиндр 1, установленный перед опрокидывателем. Кулак толкателя начинает двигаться со сниженной скоростью, обусловленной положением I рычага 6. Пройдя холостой ход, равный исходному расстоянию до подвагонного упора вагонетки, находящейся в положении А, кулак каретки начинает продвигать состав к опрокидывателю, С пере водом рычага 6 из положения 1 в положение fl разгруженный насос силовой линии переводится на рабочий режим,и толкатель продвигает состав с максимальной скоростью.
После того как подвагонный упор вагонетки, находившийся в положении В, при своем движении вперед минует опущенный кулак открытого стопора, последний автоматически закрывается с помощью датчика, а толкатель продолжает двигать состав впе.ред с максимальной скоростью.
При подходе подвагонного упора вагонетки к кулаку задерживающего стопора ролик рычага 6, попадая в межвагонным проем, переходит в nor ложение t, в результате чего снова разгружается насос силовой линии, и состав с замедленной скоростью подходит к задерживающему стопору.
Шток толкателя, Ьатолкнув вагонетку в опрокидыватель, в крайнем переднем положении с помощью датчика автоматически реверсируется. Одновременно с этим производится разгрузка вагонетки в опрокидывателе. С возвращением опрокидывателя в исходное положение (толкатель к этому времени уже возвратился в исходное пбложение), автоматически открывается задерживающий стопор и начинается следующий цикл разгрузки в упмянутом порядке. После того как гидроцилиидр I, установленный перед опрокидывателем, переведет последнюю вагонетку состава из положения А в положение Б, последующее продвижение оставшихся неразгруженных вагонеток осуществляется ГИДРОЦИ(1ИНДPW 1, установленным за опрокидываТёЛем7 Гйддавпический толкатель для ра- боты на погрузочном пункте (фиг,5) включает установку двух гидроцилиндров, 1, из которых один устанавливается перед погрузочным лотком, а второй - после него, каретки 2 с направляющими: насосную станцию 3 и блок 32 датчиков, предназначенный для изменения направления грузового потока с помощью погрузочнего лотка (пр ходу или против хода вагонетки). При этом гидроцилиндр 1 устанавливаемый перед погрузочным лотком снабжен двумя каретками 2-й соответственно удлиненной направляющей, образуемой присоединением дополнительной секции. Вторая каретка присоединяется к первой каретке, соединенной со штоком гидроцилиндра посредством тяги. На верхней левой полке удлиненной направляющей для синхронного взаимодействия с собачками 22 обеих кареток 2 устанавливается комплекс сдвоенных лыж, состоящий из двух лыж 30, с помощью тяги 33 соединенных между собой посредством двух рычагов 3. Один из рычагов 3 имеет фиксатор 35, с помощью которого обе лыжи 30 фиксируются либо в нижнем (рабоче либо в верхнем (холостом) положениях. При верхнем положении обеих rtam 30 собачки 22 свободно проходят под ними, в результате чего положение ры чагов 21 обеих кареток остается неизменным. На нижнем листе удлиненной на правлякхцёй дополнительно ycтa# oвлeн второй упор 31 (для второй каретки 2 расположенный, в отличие от первого упора 31 (для первой каретки), по левую сторону от горизонтальной оси направляющей (в соответствии с левым исполнением хвостовика рычага 21 второй каретки). Особенностью работы гидравлического толкателя на погрузочном пункте является TQ, что штоковые полости ; обоих гидроцилиндров 1 соединены между собой таким образом, что-при ходе.вперед штока одного из гидроцилиндров, шток другого гидроцилиндра движется назад. Гйдроцилиндр 1, Установленный перед.погрузочным;лотком (в дальнейшем тексте условно именуется первым гидроцилиндром), автоматически ijpo5талкивает, состав в соответствии с импульсами, идущими от датчик1а контроля наполнения вагонетки, установленного на погрузочном лотке, в зависимости от интенсивности поступления на погрузочный лоток горной массы (при этом лоток направлен по ходу вагонетки). Гидроцилиндр 1, установленный за погрузочным лотком (в дальнейшем тексте условно именуется второй гидроцилиндр), проталкивает состав с максимальной скоростью, соответствующей одновременной работе силовых насосов (при этом лоток направлен против хбда вагонетки), и в конце Xoria импульсом от датчика состав с помощью задерживающего кулака каретки тормозится благодаря автоматическому созданию подпора в штоковой полости гидроцилиндВ случае необходимости обеспечить реверсивный режим работы толкателя (при этом меняются функции толкающего и задерживающего кулаков каретки) на удлиненной направляющей устанавливается второй комплект сдвоенных лыж, направленный в сторону, противоположную направлению лыж первого комплекта , а на второй направляющей (расположенной за погрузочным лотком) устанавливается вторая лыжа 30, также направленная в противоположную сторону (на фиг. 5 показаны условной тонкой линией). В соотв тствии с этим на листах обеих направляющих устанавливаются дополнительные упоры 31: два упора на первой направляющей, один -.на второй. При работе толкателя в реверсивном режиме ль(жи первого комплекта с помощью фиксатора 35 выставляются е верхнее (холостое) положение, а второго комплекта - в нижнее (рабочее) положение. При переходе на рабочий режим положения лыж меняют на противоположное, .... Обмен вагонеток гидравлическим толкателем на погрузочных пунктах осуществляется следующим образом. Порожний состав подаьтся на погрузочный пункт и устанавливается так, чтобы подвагонный упор первой вагонетки находился в зоне действия толкающего кулака второй каретки первого гидроцилиндра. Оператор включает насосную станцию и в дистанционном режиме управяеИия выдвигает шток второго гидро цияиидрё в крайнее положение, посл чего включает первый гидроцилиндр .на х.,а вперед, который при этом толкающим кулаком второй каретки продйигает состав к погрузочному лотку. После того как шток первого гид роцилиндра завершит ход вперед,, оператор включает автоматическое упрзйление гидроцилиндрами. Во ёремя второго хода вперед-шт ка первого гидроцилиндра состав продвигается вперед толкающим кула ком первой каретки за подвагонный упор второй вагонетки. 510 После зйгрузки таким образом первых двух вагонеток передняя груженая вагонетка попадает в зону действия каретки второго гидроцилиндра и дальнейшее передвижение состава осуществляется толкающим кулаком каретки второго гидроцилиндра. Таким образом, предлагаемый толкатель обеспечивает получение значительного технико-экономического эффекта путем автоматизации и соответствующего увеличения производительности процессов проталкивания и обмена вагонеток унификации и повЫшемия надежности работы толкателей и вагонеток.
t
.t
/
-«М
/ I
«vj
e
n
V
s

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический толкатель для проталкивания состава вагонеток | 1982 |
|
SU1146475A1 |
| Толкатель нижнего действия для обмена вагонеток в клети | 1975 |
|
SU602464A1 |
| СТОПОР-ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1970 |
|
SU283534A1 |
| Реверсивный шахтный толкатель | 1980 |
|
SU1011867A1 |
| УСТАНОВКА ДЛЯ РАЗГРУЗКИ НЕРАСЦЕПЛЕННЫХ СОСТАВОВ | 1966 |
|
SU180130A1 |
| Гидравлический толкатель | 1978 |
|
SU775344A1 |
| Транспортный комплекс для проведения уклонов | 1989 |
|
SU1752875A1 |
| КАНАТНЫЙ ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1969 |
|
SU232902A1 |
| Цепной толкатель | 1962 |
|
SU150603A1 |
| Толкатель | 1988 |
|
SU1684528A1 |

t. ГИДРАВЛИЧЕСКИЙ ТОЛКАТЕЛЬ ВАГОНЕТОК, включащий насорную станцию; силовые цилиндры, соединенные с. Кйрётками. содержащими тоякащие ку-: лаки, направляющисг..) гидросистенр управления, о т л и ч а ю щ и и с я Тем, что, с целью повышения надежности работы толкателя,.силовые цилиндры расположены последовательно вдоль продольной оси вагонетки а каждая снабжена подтормаживающим кулаком, связанным с толкающим кулаком посредством подпружиненной тяги, имеющей промежуточные рычаги/ . 2. Гидравлический толкатель по П.1, о т л и ч а ю щ и и с я тем, Что каждая каретка имеет храповой ме ханизм, а гидросистема управления лыжи., шарнирно связанные посредством горизонтальных осей с направляющей при этом собачка храпового механизма установлена с возможностью взаимодействия с лыжей. 3 Гидравлический толкатель по п.1, о т л и ч а ю щ и и с я тем, что каждая каретка имеет раму, на которой установлен подтормаживающий кулак. О со со VI О1
| К | |||
| Гриншпун Л.В.Автоматизированные погруэочно-разгрузочные комплексы угольных предприятий | |||
| М., Недра, 1975 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР .№ бОЙЗЗ, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
