Изобретение относится к области электротехники и предназначено для управления тяговыми электромашинами (синхронной и асинхронной) в составе транспортных средств, судов, и прочих устройств.
Из документа WO 2022113732 А1, опубл. 06.02.2022 известно устройство управления двигателем переменного тока, оснащенное инвертором, который преобразует постоянный ток в переменный для подачи переменного тока на электродвигатель. Устройство управления двигателем переменного тока посредством бездатчикового управления без использования датчика положения ротора. Устройство предназначено для управления тяговым электроприводом с датчиком положения ротора или датчиком скорости в виде энкодера.
Это устройство управления двигателем имеет инвертор, который преобразует постоянный ток в переменный на основе сигнала широтно-импульсной модуляции, и схему проводки, соединяющую инвертор и обмотку двигателя переменного тока во внутреннем слое. Плата установлена на основной поверхности многослойной печатной платы таким образом, чтобы быть обращенной к схеме разводки, при этом направление намотки ориентировано в заданном направлении, пересекающем схему разводки, соединено последовательно и подключено к опорному потенциалу. Множество микросхемных катушек индуктивности, образующих последовательную цепь, имеющую среднюю точку, нагрузочные резисторы, подключенные между средней точкой последовательной цепи и обоими концами последовательной цепи, и вышеописанной последовательной цепью. Положение ротора двигателя переменного тока оценивается с помощью схемы дифференциального усиления, в которой пара входных концов соединена с обоими концами и выходом схемы дифференциального усиления, а инвертор оценивается в соответствии с предполагаемым положением ротора. Включает в себя блок управления, который формирует сигнал с широтно-импульсной модуляцией для подачи на него.
Из документа CN113708668 A, опубл. 26.11.2021 известен инвертор, который содержит блок инвертирования U-фазы, блок инвертирования V-фазы и блок инвертирования W-фазы, при этом блок инвертирования U-фазы, блок инвертирования V-фазы и блок инвертирования W-фазы соответственно образованы путем соединения множество дискретных транзисторов IGBT, включенных параллельно.
Из документа US2018337623 A1, опубл. 22.11.2018 известно приводное устройство и способ управления приводным устройством, которые могут обеспечить как сдерживание увеличения вычислительной нагрузки блока управления, так и обеспечение управляемости двигателя. Приводное устройство в соответствии с изобретением использует следующие конфигурации для вышеупомянутой основной цели. Первый аспект раскрытия обеспечивает приводное устройство. Приводное устройство включает в себя двигатель, инвертор, сконфигурированный для привода двигателя путем переключения множества переключающих элементов, и электронный блок управления. Электронный блок управления выполнен с возможностью обнаружения электрического угла двигателя в качестве обнаруженного электрического угла. Электронный блок управления выполнен с возможностью управления инвертором с помощью широтно-импульсной модуляции. Электронный блок управления выполнен с возможностью выполнения первого управления с интервалом в один период несущей волны. Первое управление представляет собой управление заданием команд напряжения оси d и оси q на основе команды крутящего момента для двигателя и обнаруженного электрического угла. Электронный блок управления выполнен с возможностью выполнения секундного управления с интервалами полупериода несущей волны. Второе управление представляет собой управление, включающее в себя управление вычислением прогнозируемого электрического угла на основе обнаруженного электрического угла. Прогнозируемый электрический угол используется для генерации сигнала широтно-импульсной модуляции.
Наиболее близким аналогом является устройство управления двигателем переменного тока (АС), включающее инвертор, контроллер, схему формирования синхронных импульсов, схему формирования асинхронных импульсов, определитель переключения режимов управления и селектор. Инвертор сконфигурирован для преобразования входной мощности постоянного тока (DC) от источника питания в мощность переменного тока (AC) посредством управления множеством переключающих элементов для подачи мощности переменного тока на электродвигатель переменного тока. Контроллер сконфигурирован для вычисления скорости модуляции, которая представляет собой отношение амплитуды вектора напряжения к напряжению инвертора, а также для вычисления фазы вектора напряжения. Схема генерации синхронных импульсов сконфигурирована для генерации синхронного импульсного сигнала, синхронизированного с электрическим углом двигателя переменного тока, в качестве управляющего сигнала для привода инвертора в зависимости от скорости модуляции, фазы вектора напряжения и электрического угла переменного тока мотора (см. US 2017331410 А1, опубл. 16.11.2017)
Технической проблемой, является отсутствие возможности использовать инвертор для управления как синхронным так асинхронным двигателями, а также необходимость использования контроллера верхнего уровня (в английской терминологии –VCU).
Заявленное решение отличается от указанных выше аналогов тем, что применяется сигнальный процессор, позволяющий существенно упростить аппаратную часть инвертора и перевести многие функции на программный уровень.
За счет этого исключаются специализированные «асики» обработки резольвера, вспомогательный коммуникационный процессор, процессор безопасности, что существенно упрощает аппаратную часть управления печатной платы (единое решение).
У аналогов используются сложные многослойные печатные платы в отличие единственной печатной платы двухслойного исполнения.
Технический результат заключается в реализации векторного управления.
Технический результат достигается при реализации инвертора транспортного исполнения, состоящего из алюминиевого корпуса, силового модуля IGBT, силового конденсатора, датчиков выходного тока, печатной платы системы управления двухслойного исполнения, колодки подключения, гермовводов, при этом силовой модуль IGBT крепится к основному корпусу инвертора, который также совмещает функцию жидкостного охлаждения через внешние штуцеры охлаждающая жидкость подается внутрь корпуса инвертора, и с помощью теплообменника через тепловой контакт охлаждает силовой модуль IGBT, а выходные шины с силового модуля IGBT через датчики тока на основе эффекта холла подключаются к колодке подключения инвертора, которая служит для подключения входного напряжения постоянного тока и выхода трех фаз электродвигателя, при этом входное напряжение посредством шин подключается к силовому конденсатору звена постоянного тока и далее через терминалы к силовому модулю IGBT, а внешний разъем сигнальных интерфейсов подсоединяется непосредственно к печатной плате системы управления, которая включает в себя датчик напряжения звена Ud и систему управления содержащую внешние интерфейсы и силовые драйвера, при этом электрический интерфейс между драйверами и управляющими контактами силового модуля IGBT реализуется пружинными контактами.
Подключение к датчикам тока выходных цепей производится проводным способом к колодке подключения печатной платы системы управления.
В теплообменнике используется параллельная схема охлаждения силовых сборок с балансировкой протока по трем плечам охлаждения.
Система управления осуществляется программным обеспечением, состоящим из начального загрузчика и основной программы.
Выходная мощность инвертора 160 Квт-250Квт при напряжении в звене Ud 400-850 Вольт.
Такое конструктивное выполнение обеспечивает следующие технические характеристики:
Выходная мощность инвертора 160 Квт-250Квт (Пиковая)при напряжении в звене Ud 400-850 Вольт (в зависимости от типа применяемого силового модуля IGBT.)
Iвых: 450 Ампер RMS (напряжение в звене Ud до 450 Вольт)
Iвых: 300 Ампер RMS (напряжение в звене Ud до 900 Вольт)
Питание собственных нужд: Бортовая сеть 12 Вольт или 24 Вольт.
Тип интерфейса обмена: 2 Кан интерфейса.
Тип интерфейсов: датчики скорости резольвер или энкодер.
Два гальванически изолированных измерителя датчика температуры.
Управление цепью предзаряда.
Защита от аварийных ситуаций.
Возможность управления Синхронной и Асинхронной электромашиной.
Проведены испытания макетного образца:
В диапазоне скоростей +- 6000 об.мин
В диапазон токов 400A RMS
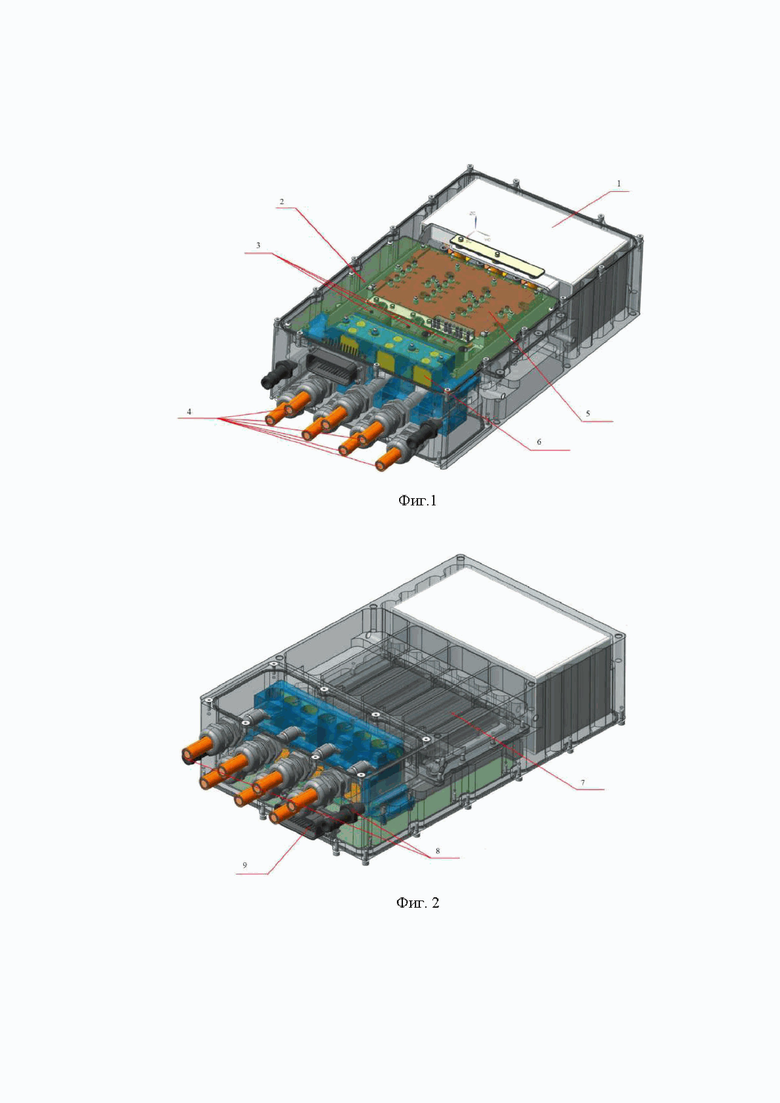
Инвертор представлен на фиг. 1 и 2, где:
1 – силовой конденсатор
2 – печатная плата системы управления
3 - датчики выходного тока
4 – силовые кабели
5 – силовой модуль IGBT
6 - колодка подключения
7 – теплообменник
8 – внешние штуцера
9 – сигнальный разъем
При этом заявленный инвертор транспортного исполнения по сравнению с известными аналогами имеет преимущества как конструктивные, так и программные.
Базовой частью инвертора является силовой модуль IGBT, который с помощью широтно-импульсной модуляции формирует выходное напряжение первой гармоники с заданной частотой и амплитудой.
Наличие датчиков выходного тока позволяет организовать обратную токовую связь по обмоткам электромашины.
В устройстве инвертора транспортного исполнения применяется система жидкостного охлаждения силового модуля IGBT посредством теплообменника. Система непосредственно интегрирована в корпус устройства. Используется параллельная схема охлаждения силовых сборок с балансировкой протока по трем плечам охлаждения. Схема организации протока жидкости внутри охлаждающей зоны устройства приведена на фиг. 3.
Предлагаемый инвертор транспортного исполнения содержит универсальный аппаратный интерфейс для всех типов электромашин в части датчиков положения ротора и скорости.
Для управления разными электромашинами необходимо менять только программное обеспечение инвертора.
Исключение контроллера верхнего уровня достигается программным обеспечением инвертора.
Электрический интерфейс между драйверами и управляющими контактами силового модуля IGBT реализуется пружинными контактами. Данная технология обеспечивает легкость и технологичность сборки инвертора.
В алгоритмах управления электромашинами применяется векторное управление с рядом функций, в частности, онлайн линеаризация резольвера положения ротора в течении всего срока работы инвертора, калибровка в процессе работы датчиков выходного тока для исключения процесса старения и других воздействий на снижение технических характеристик, применяются алгоритмы снижения колебаний трансмиссии в движении.
Для реализации векторного управления синхронной электромашиной необходимо знать положение ротора в любой произвольный момент времени.
Ниже показаны рисунки с принципами реализации программной обработки сигналов резольвера (фиг. 4, 5).
На обмотку возбуждения поступает синусоидальный сигнал частотой 10 кГц и амплитудой 7 Вольт.
С сигнальных обмоток снимается модулированное напряжение синусной и косинусной обмотки.
Данные сигналы подаются на вход АЦП процессора, установленного на печатной плате системы управления, проводится выделение огибающей напряжения синуса и косинуса и далее при помощи тригонометрического преобразования, осуществляемого программным преобразованием, выделяется угол положения ротора.
Для повышения достоверности угла в условиях сильных помех организуется цепь фазовой подстройки угла.
Все алгоритмы управления, реализованы в программном виде центральным управляющим процессором (фиг. 6).
Центральный процессор имеет два блока программного обеспечения (далее –ПО): Начальный загрузчик и основную Программу.
Начальный загрузчик обеспечивает возможность смены основного ПО через КАН канал связи.
Обновление ПО осуществляется отечественным КАН адаптером MARAFHON-CAN и приложения под Windows.
На фиг. 7 приведена диаграмма показывающая нелинейность датчика положения угла резольвера.
В программном обеспечении в блоке основной программы формируется «эталонное» положение угла.
И вычисляется ошибка реального угла резольвера. Эта ошибка заносится в таблицу коррекции. Эта коррекция добавляется к углу резольвера и далее используется в математических вычислениях.
Все необходимые сигналы и параметры (параметры педалей газа и тормоза, параметры батареи тяговой и ее лимиты в моторном и генераторном режиме, дополнительные параметры системы охлаждения) передаются в инвертор посредством КАН шины.
И реализуется векторное управление электродвигателем.
Сигнал с датчиков выходного тока подается на модуль преобразования «кларка» основной программы, где преобразуется в двухфазную систему координат.
И далее при помощи преобразования парка преобразуется в неподвижную систему координат где получают активный ток Iq пропорциональный моменту и реактивный ток Id пропорциональный магнитному потоку.
Регулируя эти составляющие можно управлять моментом и скоростью электромашины в произвольном направлении.
Обратным преобразованием парка и кларка восстанавливается трехфазное напряжение на выходных клеммах инвертора.
Возможность использования двух инверторов в режиме «ведущий-ведомый» для организации двухмоторного электронного-дифференциала без использования внешних контроллеров.
Для организации режима ведущий ведомый, используются два инвертора, при этом связки инверторов необходимо соединить вместе по информационной шине КАН.
В сервисном программном обеспечении инвертора, обозначить для одного инвертора режим «мастер», для другого инвертора режим «слейв». Инверторы начнут работу в режиме ведущий-ведомый.
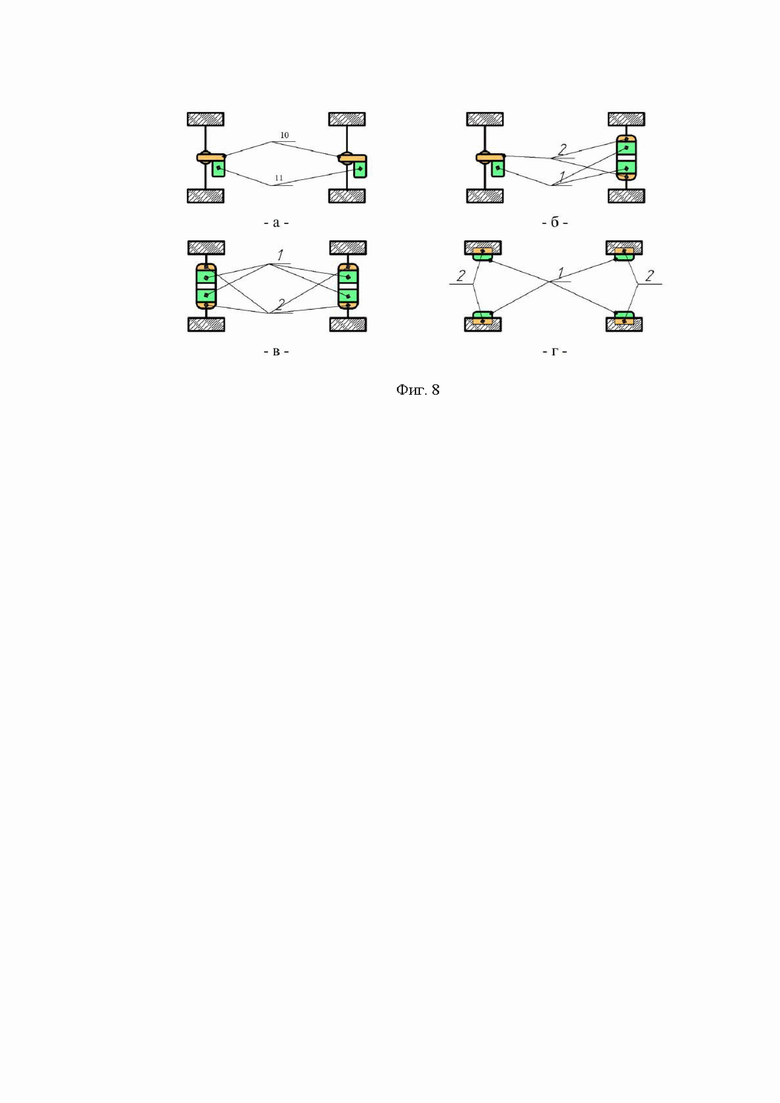
Использование связки инверторов и оригинальных алгоритмов управления в составе программного обеспечения позволяет реализовать схемы управления, представленные на фиг. 8.
Применение инвертора в составе транспортного средства исключает необходимость использования контроллера верхнего уровня (в английской терминологии –VCU).
Все функции управления трансмиссией, опроса педалей газа и тормоза, считывания состояния высоковольтной батареи, и модель управления транспортным средством реализована на фиг. 8 - Особенности полноприводных компоновочных схем:
- традиционный дифференциальный привод (а),
- комбинация дифференциального и индивидуального электроприводов (б),
- индивидуальный тип привода с подрессоренными электроприводами (в),
-индивидуальный тип привода с неподрессоренными электроприводами (г), где
10 - электромоторы; 11 – редукторы.
Данная особенность применима как для однодвигательных решений, так и для многодвигательных решений.
Для качественного регулирования выходных токов применяется быстрый контур регулирования тока с временем 50-150 мксек.
Перечисленные выше режимы ранее не применялись и не применяются в существующих аналогах.
Принцип действия частотного регулирования основан на зависимости скорости вращения и момента силы на валу двигателя переменного тока от частоты напряжения питания. Частотные регуляторы изменяют частоту поданного на электродвигатель напряжения, тем самым регулируя скорость вращения ротора и момент силы.
Частотный преобразователь построен на базе схем двойного преобразования. Такое техническое решение имеет следующие преимущества:
Возможность изменять частоту как в большую, так и меньшую сторону.
Выходное напряжение чистой синусоидальной формы.
Отсутствие высших гармоник.
Плавное, высокоточное регулирование частоты питающего напряжения двигателя.
Состоит такой преобразователь частоты из трех блоков:
Звено постоянного тока - фильтра. Этот узел осуществляет сглаживание пульсаций тока от высоковольтной батареи.
Инвертирующего блока. Этот элемент осуществляет обратное преобразование постоянного напряжения в переменное. Индуктивный элемент на выходе осуществляет фильтрацию постоянной составляющей, а также высокочастотных помех, наличие которых негативно сказывается на работе электродвигателя.
Управляющей схемы на базе микропроцессора. Основные ее функции – задание частоты выходного напряжения и тока. Частота тока на выходе инвертора определяется шириной или длительностью управляющих импульсов со схемы управления (широтно- или частотно- импульсная модуляция). Процессор также осуществляет связь с удаленными пунктами управления, автоматическое регулирование по обратной связи по механическим и электрическим характеристикам подключенной к нему электрической машины, а также другие функции.
Таким образом, при частотном регулировании питающее напряжение сначала преобразуется в постоянное, затем инвертируется в переменное напряжение требуемой частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь напряжения для водородной системы энергоснабжения транспортного средства | 2023 |
|
RU2808867C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2507418C1 |
| Тяговый инвертор электромобильного транспорта | 2024 |
|
RU2824653C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТРЕХФАЗНОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ С ПЛАВНЫМ РЕГУЛИРОВАНИЕМ ТОКА ДЛЯ ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН | 2003 |
|
RU2261518C1 |
| Интеллектуальный силовой модуль и преобразовательная система | 2020 |
|
RU2750914C1 |
| Тяговый инвертор электрогрузовика | 2024 |
|
RU2825486C1 |
| Преобразователь напряжения высоковольтной аккумуляторной батареи высокоавтоматизированного беспилотного грузового транспортного средства в низковольтное напряжение постоянного тока для бортовой сети с защитой ключей | 2023 |
|
RU2818375C1 |
| РЕВЕРСИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ МЕЖДУ СЕТЯМИ ПЕРЕМЕННОГО И ПОСТОЯННОГО ТОКА | 2007 |
|
RU2343615C1 |
| Силовой преобразовательный модуль | 2020 |
|
RU2743827C1 |


Изобретение относится к области электротехники и предназначено для управления тяговыми электромашинами (синхронной и асинхронной) в составе транспортных средств, судов и прочих устройств. Инвертор состоит из алюминиевого корпуса, силового модуля IGBT, силового конденсатора, датчиков выходного тока, печатной платы системы управления двухслойного исполнения, колодки подключения, гермовводов, при этом силовой модуль IGBT крепится к основному корпусу инвертора, который также совмещает функцию жидкостного охлаждения, через внешние штуцеры охлаждающая жидкость подается внутрь корпуса инвертора и через тепловой контакт охлаждает силовой IGBT модуль, а выходные шины с модуля IGBT через датчики тока на основе эффекта холла подключаются к колодке подключения инвертора, которая служит для подключения входного напряжения постоянного тока и выхода трех фаз электродвигателя, при этом входное напряжение посредством шин подключается к силовому конденсатору звена постоянного тока и далее через терминалы к модулю IGBT, а внешний разъем сигнальных интерфейсов подсоединяется непосредственно к печатной плате системы управления, которая включает в себя датчик напряжения звена Ud и систему управления, содержащую внешние интерфейсы и силовые драйверы. 4 з.п. ф-лы, 8 ил.
1. Инвертор, предназначенный для управления тяговыми электромашинами в составе транспортных средств, состоящий из алюминиевого корпуса, силового модуля IGBT, силового конденсатора, датчиков выходного тока, печатной платы системы управления двухслойного исполнения, колодки подключения, гермовводов, при этом силовой модуль IGBT крепится к основному корпусу инвертора, который также совмещает функцию жидкостного охлаждения, через внешние штуцеры охлаждающая жидкость подается внутрь корпуса инвертора и с помощью теплообменника через тепловой контакт охлаждает силовой модуль IGBT, а выходные шины с силового модуля IGBT через датчики тока на основе эффекта холла подключаются к колодке подключения инвертора, которая служит для подключения входного напряжения постоянного тока и выхода трех фаз электродвигателя, при этом входное напряжение посредством шин подключается к силовому конденсатору звена постоянного тока и далее через терминалы к силовому модулю IGBT, а внешний разъем сигнальных интерфейсов подсоединяется непосредственно к печатной плате системы управления, которая включает в себя датчик напряжения звена Ud и систему управления, содержащую внешние интерфейсы и силовые драйверы, при этом электрический интерфейс между драйверами и управляющими контактами силового модуля IGBT реализуется пружинными контактами.
2. Инвертор транспортного исполнения по п.1, отличающийся тем, что подключение к датчикам тока выходных цепей производится проводным способом к колодке печатной платы системы управления.
3. Инвертор транспортного исполнения по п.1, отличающийся тем, что в теплообменнике используется параллельная схема охлаждения силовых сборок с балансировкой протока по трем плечам охлаждения.
4. Инвертор транспортного исполнения по п.1, отличающийся тем, что система управления осуществляется программным обеспечением, состоящим из начального загрузчика и основной программы.
5. Инвертор транспортного исполнения по п.1, отличающийся тем, что выходная мощность инвертора 160-250 кВт при напряжении в звене Ud 400-850 В.
| Способ дозирования электролита в герметичных щелочных аккумуляторах | 1960 |
|
SU132280A1 |
| RU 54473 U1, 27.06.2006 | |||
| Высеивающий аппарат | 1940 |
|
SU66652A1 |
| Система управления электроприводом транспортного средства | 2018 |
|
RU2690532C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2677217C1 |
| ТЯГОВЫЙ МЕХАТРОННЫЙ МОДУЛЬ | 2007 |
|
RU2330371C1 |
| KR 1020050089842 A, 08.09.2005 | |||
| KR 101618722 B1, 09.05.2016 | |||
| CN 201656898 U, 24.11.2010 | |||
| СПОСОБ ИСПЫТАНИЙ ОСКОЛОЧНЫХ БОЕПРИПАСОВ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2482438C1 |
| ИЗБИРАТЕЛЬНОЕ УПРАВЛЕНИЕ ДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА ИЛИ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2579439C2 |
| KR 1020120076724 A, 10.07.2012 | |||
| CN 108712024 A, | |||

