Изобретение относится к устройствам управления электродвигателями с помощью векторного управления и может быть использовано в качестве системы управления электроприводом унифицированной машины технологического электротранспорта.
Из уровня техники известна система векторного управления скоростью асинхронного двигателя (RU2422979C1, МПК Н02Р 21/02, Н02Р 27/04, опубл. 27.06.2011). Система содержит блок регулирования переменных, состоящий из двух контуров: контура регулирования намагничивающей составляющей тока статора и контура регулирования активной составляющей тока статора, первый и второй блоки координатных преобразований, блок векторного фильтра, первый, второй и третий блоки фазных преобразований, преобразователь частоты, блок датчиков тока фаз статора, блок датчиков главного потокосцепления двигателя в воздушном зазоре асинхронного двигателя, датчик угловой скорости и асинхронный двигатель. В структуру системы управления системы векторного управления введены модуль вычисления ЭДС и перекрестных связей и модуль вычисления экстремальных значений составляющих тока статора, связанные с контурами регулирования активной составляющей тока статора и регулирования намагничивающей составляющей тока статора.
Недостатком известного технического решения является его низкая технологичность, что обусловлено сложностью системы управления, связанную с наличием в ее конструкции большого числа дискретных элементов. Упомянутое обстоятельство в целом также снижает ее надежность.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признано устройство управления асинхронным электродвигателем (RU2193814C2, МПК Н02Р 21/00, опубл. 27.11.2001]. Устройство содержит инвертор, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции, и схему регулирования выходного напряжения инвертора путем изменения глубины модуляции по командам на изменение выходного напряжения, осуществляемое по командам на изменение составляющих намагничивающей и моментообразующей тока статора асинхронного двигателя, на который подается напряжение от инвертора.
Недостатком известного устройства являются ограниченные возможности по изменению параметров его работы, вследствие отсутствия в конструкции устройства ввода данных и средств хранения уставок регулятора.
Технической задачей, на решение которой направлено заявленное изобретение, является повышение качества регулирования скорости вращения ротора асинхронного электродвигателя.
Указанная задача решена тем, что система управления содержит асинхронный электродвигатель, к которому подключен инвертор, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции. При этом система управления выполнена в виде микропроцессорной системы, силовой выход которой подключен к инвертору. Микропроцессорная система содержит первый, второй и третий аналоговые измерительные входы, а также первый, второй, третий и -четвертый цифровые измерительные входы. К первому аналоговому измерительному входу подключен выход амперметра, измеряющего токи фаз на выходе инвертора, ко второму аналоговому измерительному входу подключен выход вольтметра, измеряющего напряжение постоянного тока на силовом выходе, а к третьему аналоговому измерительному входу подключен выход потенциометра акселератора транспортного средства. К первому цифровому измерительному входу подключен первый канал энкодера, установленного на валу электродвигателя, ко второму измерительному входу подключен второй канал энкодера, а к третьему и четвертому цифровым измерительным входам подключены, соответственно, датчики включения основного и стояночного тормозов; дополнительно к микропроцессорной системе подключен блок управления, выполненный в виде LCD-индикатора и блока ввода-данных.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью конструктивных признаков системы управления, является повышение качества регулирования скорости вращения ротора асинхронного электродвигателя электропривода транспортного средства, за счет применения датчиков обратной связи: амперметра, вольтметра, потенциометра и энкодера, подключенных к микропроцессорной системе, позволяющей реализовать эффективные алгоритмы векторного регулирования. Применение датчиков основного и стояночного тормозов позволяет реализовать автоматическое отключение системы управления, а блок управления - изменять параметры режимов работы системы управления, что обеспечивает возможность ее адаптации к любому асинхронному электродвигателю и добиться наиболее эффективных режимов работы последнего.
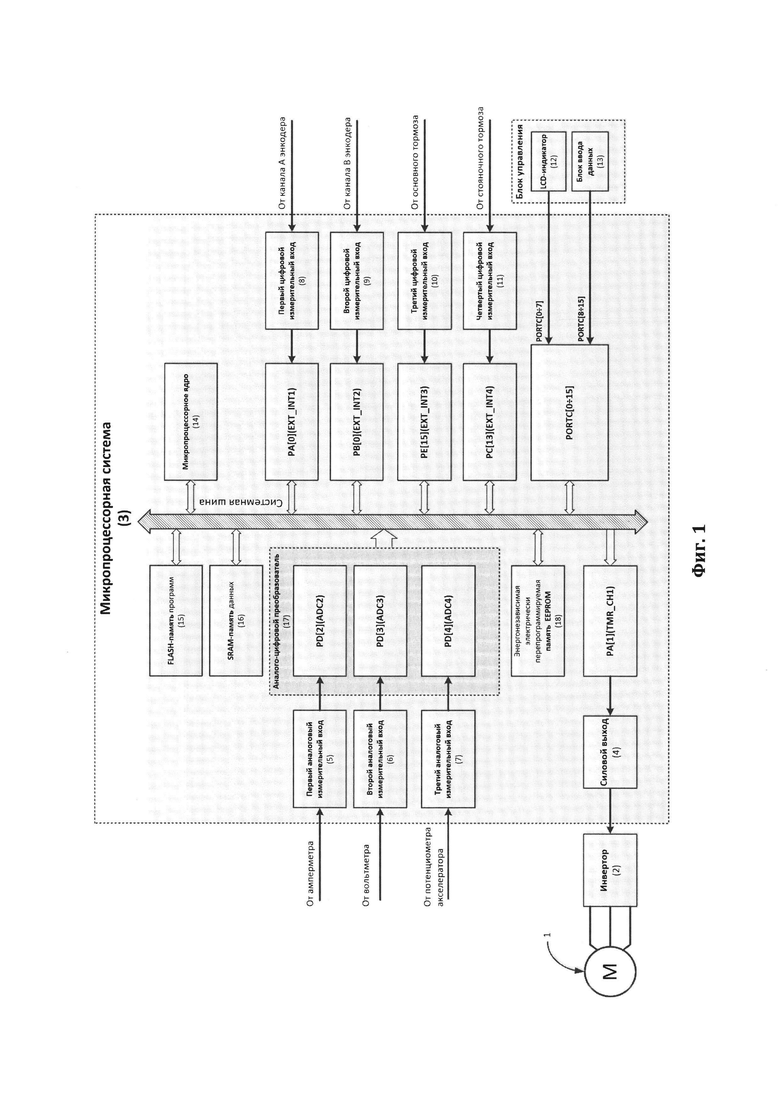
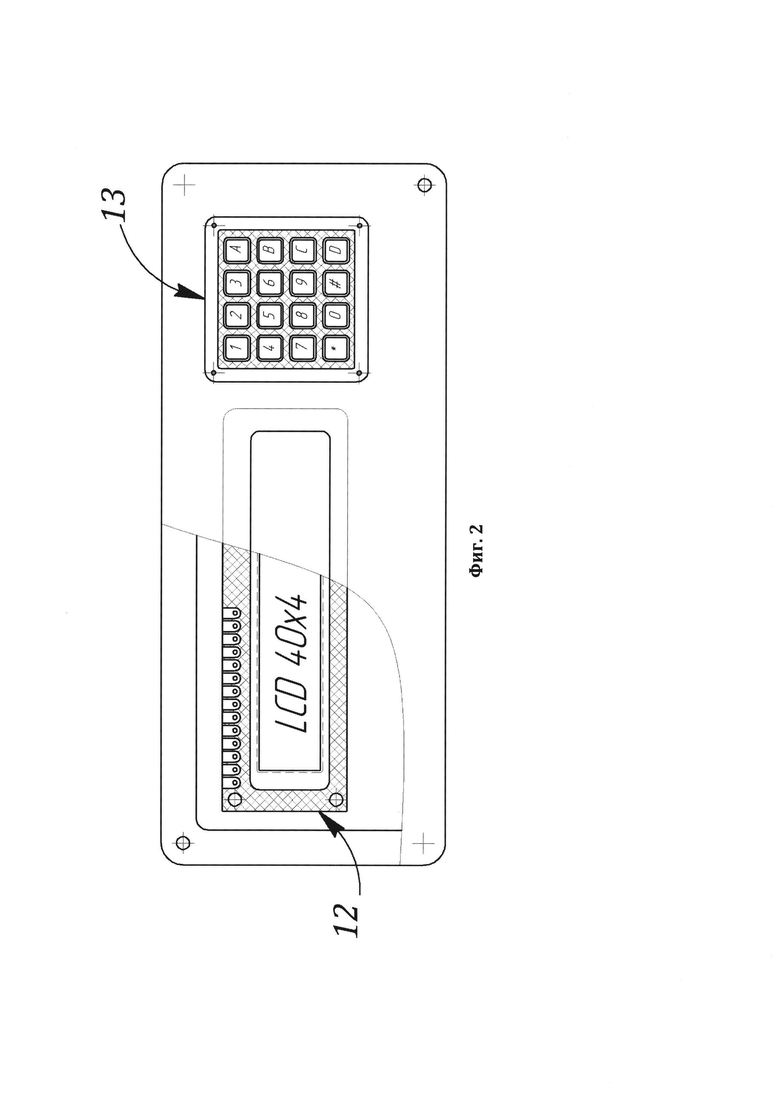
Изобретение поясняется чертежами, где на фиг. 1 показана структурная схема системы управления, а на фиг. 2 - блок управления.
Система управления электроприводом транспортного средства устроена следующим образом.
Объектом управления системы является асинхронный электродвигатель 1, к которому подключен инвертор 2, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции. Система управления выполнена в виде микропроцессорной системы 3, силовой выход 4 которой подключен к инвертору 2. Микропроцессорная система 3 содержит первый, второй и третий аналоговые измерительные входы 5, 6 и 7, а также первый, второй, третий и четвертый цифровые измерительные входы 8, 9, 10 и 11. К первому аналоговому измерительному входу 5 подключен выход амперметра, измеряющего токи фаз на выходе инвертора, ко второму аналоговому измерительному входу 6 подключен выход вольтметра, измеряющего напряжение постоянного тока на силовом выходе 4, а к третьему аналоговому измерительному входу 7 подключен выход потенциометра акселератора транспортного средства. К первому цифровому измерительному входу 8 подключен первый канал энкодера, установленного на валу электродвигателя, ко второму измерительному входу 9 подключен второй канал энкодера, а к третьему и четвертому цифровым измерительным входам 10 и 11 подключены, соответственно, датчики включения основного и стояночного тормозов; дополнительно к микропроцессорной системе подключен блок управления, выполненный в виде LCD-индикатора 12 и блока ввода-данных 13.
Более подробный пример возможной реализации системы управления рассмотрим на примере микропроцессорной системы, построенной на базе микроконтроллера, основанного на высокопроизводительном микропроцессорном ядре ARM Cortex-М3 с тактовой частотой до 80 МГц и производительностью 1.25 DMIPS/МГц. В качестве такого микроконтроллера может использоваться, например, микросхема серии 1986 ВЕ9х.
Микроконтроллер содержит микропроцессорное ядро 14, соединенное с помощью системной шины с FLASH-памятью программ 15, SRAM-памятью данных 16, аналого-цифровым преобразователем 17, энергонезависимой электрически перепрограммируемой памятью EEPROM 18, таймерами-счетчиками и входами внешних прерываний, входами/выходами которых являются выводы универсальных шестнадцатиразрядных двунаправленных портов ввода-вывода микроконтроллера, выполняющих основную или альтернативную функцию.
В приводимом примере реализации системы управления линия PA[1](TMR_CH1) микроконтроллера, являющаяся выходом таймера 1, подключена к силовому выходу 4, первый, второй и третий аналоговые измерительные входы 5, 6 и 7 подключены к линиям PD[2](ADC2]-PD[4]ADC4 порта D, при этом линии PD[0] и PD[1] порта D используются для подключения источника опорного напряжения аналого-цифрового преобразователя. Первый, второй, третий и четвертый цифровые измерительные входы 8, 9, 10 и 11 подключены к линиям PA[0](EXT_INT1}, PB[10](EXT_INT2), PE[15](EXT_INT3) и PC[13](EXT_INT4) портов А, В, Е и С, являющихся входами внешних аппаратных прерываний, позволяющих создавать на их основе надежные счетчики внешних событий. Шестнадцатиразрядный универсальный двунаправленный порт ввода-вывода F используется для подключения блока управления. При этом младшие восемь линий порта PF[0]-PF[7] используются для подключения LCD-индикатора, а старшие восемь PF[8]-PF[15] - для подключения блока ввода данных, выполненного в виде кнопочной клавиатуры, содержащей шестнадцать клавиш. Силовой выход 4 микропроцессорной системы 3 может быть реализован на основе транзисторных ключей. В качестве энкодера применяют промышленный инкрементальный прибор1 (1 Lenord+Bauer. Энкодеры инкрементальные и абсолютные, датчики скорости, EcoController, MiniCoder // Промышленная автоматика. URL: http://www.proavtomatika.ru/products/Lenord+Bauer/lenord.htm (дата обращения: 21.05.2018)), снабженный двумя измерительными каналами (традиционно обозначаемыми А и В), при этом смещение фаз между сигналами каналов составляет 90°. Для дополнительной защиты и обеспечения возможности аварийного останова системы управления при превышении температуры двигателя сверх допустимого значения, к одной из свободных линий порта D, например PD[5](ADC5), может быть через операционный усилитель подключен выход резистивного датчика температуры, установленного на корпусе двигателя (на структурной схеме условно не показан).
Система управления электроприводом транспортного средства работает следующим образом.
Первоначально систему управления устанавливают на платформу унифицированной машины технологического электротранспорта, подключают выход инвертора к электродвигателю, выходы аналоговых датчиков - амперметра, вольтметра и потенциометра акселератора транспортного средства - подключают к аналоговым измерительным входам 5, 6 и 7, а выходы цифровых датчиков - энкодера и датчиков включения тормозов - подключают, соответственно, к цифровым измерительным входам 8, 9, 10 и 11. Далее с помощью блока ввода данных 13 и LCD-индикатора 12 блока управления контролируют и при необходимости корректируют параметры программного регулятора, хранящиеся в энергонезависимой электрически перепрограммируемой памяти EEPROM 18 микроконтроллера. К таким параметрам, в частности, относятся следующие: частота управляющего ШИМ-сигнала, которая может варьироваться в пределах от 1 до 10 кГц, постоянная времени ротора, ограничения по скорости и по току, максимальная величина ускорения и другие.
Затем с помощью блока управления приводят систему управления в действие. В соответствии с управляющей программой, хранимой во FLASH-памяти программ 15 микроконтроллера, выполняемой его микропроцессорным ядром 14, на линию PA1(TMR_CH1) подается ШИМ-сигнал прямоугольной формы с заданной частотой и скважностью, управляющий через силовой выход работой инвертора 2 и реализующий алгоритм векторного управления асинхронным двигателем по принципу косвенной ориентации по полю ротора. Одновременно с этим микроконтроллером реализуется постоянный цикл опроса аналоговых и цифровых датчиков, полученные значения которых сохраняются в SRAM-памяти данных 16. При этом мгновенные значения токов фаз, частоты и направления вращения ротора электродвигателя, а также положение педали акселератора транспортного средства используются для автоматической коррекции управляющего воздействия. В случае срабатывания датчиков включения основного или стояночного тормозов микроконтроллер останавливает работу системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОБКОВЫЙ КРАН С БЛОКОМ ТЕЛЕМЕТРИИ | 2022 |
|
RU2793261C1 |
| Автономный павильон ожидания пассажирского транспорта | 2022 |
|
RU2782655C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| УСТРОЙСТВО ПОГРУЖНОЙ ТЕЛЕМЕТРИИ | 2015 |
|
RU2624624C2 |
| ЭЛЕВАТОРНЫЙ СТЕЛЛАЖ | 2021 |
|
RU2765507C1 |
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАТРОННЫХ ПРИВОДОВ | 2014 |
|
RU2578044C1 |
| Тепловая пушка для поддержания заданной температуры в помещении | 2022 |
|
RU2819978C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ СЫПУЧЕГО МАТЕРИАЛА | 2022 |
|
RU2787409C1 |
| УНИВЕРСАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ | 2010 |
|
RU2430273C1 |
| Узел выпуска и дожигания газов | 2022 |
|
RU2805103C1 |
Изобретение относится к области электротехники и транспорта и может быть использовано в качестве системы управления электроприводом унифицированной машины технологического электротранспорта. Техническим результатом является повышение качества регулирования скорости вращения ротора асинхронного электродвигателя. Система управления содержит асинхронный электродвигатель, к которому подключен инвертор, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции. Система управления выполнена в виде микропроцессорной системы, силовой выход которой подключен к инвертору. Микропроцессорная система содержит первый, второй и третий аналоговые измерительные входы, а также первый, второй, третий и четвертый цифровые измерительные входы. К первому аналоговому измерительному входу подключен выход амперметра, измеряющего токи фаз на выходе инвертора, ко второму аналоговому измерительному входу подключен выход вольтметра, измеряющего напряжение постоянного тока на силовом выходе, а к третьему аналоговому измерительному входу подключен выход потенциометра акселератора транспортного средства. К первому цифровому измерительному входу подключен первый канал энкодера, установленного на валу электродвигателя, ко второму измерительному входу подключен второй канал энкодера, а к третьему и четвертому цифровым измерительным входам подключены соответственно датчики включения основного и стояночного тормозов; дополнительно к микропроцессорной системе подключен блок управления, выполненный в виде LCD-индикатора и блока ввода данных. 2 ил.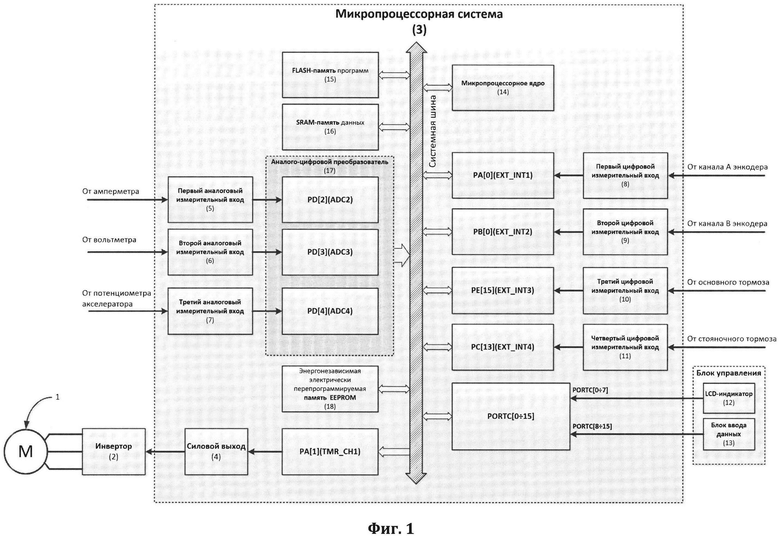
Система управления электроприводом транспортного средства, содержащая асинхронный электродвигатель, к которому подключен инвертор, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции, отличающаяся тем, что выполнена в виде микропроцессорной системы, силовой выход которой подключен к инвертору; микропроцессорная система содержит первый, второй и третий аналоговые измерительные входы, а также первый, второй, третий и четвертый цифровые измерительные входы; к первому аналоговому измерительному входу подключен выход амперметра, измеряющего токи фаз на выходе инвертора, ко второму аналоговому измерительному входу подключен выход вольтметра, измеряющего напряжение постоянного тока на силовом выходе, а к третьему аналоговому измерительному входу подключен выход потенциометра акселератора транспортного средства; к первому цифровому измерительному входу подключен первый канал энкодера, установленного на валу электродвигателя, ко второму измерительному входу подключен второй канал энкодера, а к третьему и четвертому цифровым измерительным входам подключены соответственно датчики включения основного и стояночного тормозов; дополнительно к микропроцессорной системе подключен блок управления, выполненный в виде LCD-индикатора и блока ввода данных.
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА | 2003 |
|
RU2268392C2 |
| Раздвижные подъемные подмости для возведения труб | 1952 |
|
SU99911A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2006 |
|
RU2322752C1 |
| УСТАНОВКА ДЛЯ ХИМИЧЕСКОЙ ОЧИСТКИ СИСТЕМ ОТОПЛЕНИЯ | 2006 |
|
RU2317503C1 |
| JP 201751669 A, 22.06.2017 | |||
| US 9413282 B2, 09.08.2016 | |||
| Устройство для управления реверсивным вентильным преобразователем | 1978 |
|
SU764092A1 |

