Уровень техники
1. Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к устройству управления транспортным средством, выполненному с возможностью управлять транспортным средством, оснащенным электромотором.
2. Описание предшествующего уровня техники
Один пример способа управления для приведения в действие электромотора трехфазного переменного тока представляет собой управление с широтно-импульсной модуляцией (PWM). При PWM-управлении, преобразователь мощности управляется в соответствии с соотношением абсолютных величин между сигналами команд управления фазным напряжением, которые задаются с точки зрения согласования фазного тока, поданного в электромотор трехфазного переменного тока, с предварительно определенным значением и несущим сигналом предварительно определенной частоты.
Когда электромотор трехфазного переменного тока приводится в действие, пульсация в напряжении постоянного тока, вводимом в преобразователь мощности (т.е. так называемый пульсирующий компонент), увеличивается в некоторых случаях. Для способа уменьшения пульсации, например, в выложенной заявке на патент (Япония) № 2009-171768, предложена технология, в которой третий гармонический сигнал накладывается на сигналы команд управления фазным напряжением, и в котором коррекция выполняется для того, чтобы уменьшать сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала.
С другой стороны, когда электромотор трехфазного переменного тока приводится в действие и имеет чрезвычайно низкое число оборотов, нагрев переключающих элементов преобразователя мощности в некоторых случаях увеличивается, что может вызывать повреждение. Для способа уменьшения нагрева переключающих элементов, например, в выложенной заявке на патент (Япония) № 2016-054594, предложена технология, в которой центральное значение сигналов команд управления фазным напряжением подвергается коррекции смещения, чтобы уменьшать потери переключающих элементов.
Исследования авторов настоящего изобретения показывают, что пульсация, сформированная на стороне напряжения постоянного тока преобразователя мощности, увеличивается, если выполняется коррекция, описанная в выложенной заявке на патент (Япония) № 2016-054594 (т.е. смещение центрального значения сигналов команд управления фазным напряжением). Это обусловлено тем, что сдвиг сигналов команд управления фазным напряжением приводит к продлению периода нулевого вектора, в который все переключающие элементы в трех фазах выключены.
Чтобы уменьшать пульсацию, которая увеличена, также можно приспосабливать коррекцию, описанную в выложенной заявке на патент (Япония) № 2009-171768 (т.е. коррекцию для сдвига амплитуд и сдвига фаз третьего гармонического сигнала); тем не менее, достаточный корректирующий эффект не может получаться в то время, когда центральное значение сигналов смещается, и пульсация не может уменьшаться. Другими словами, пульсация, которая увеличена вследствие смещения центрального значения сигналов, не может уменьшаться посредством коррекции для сдвига амплитуд и сдвига фаз третьего гармонического сигнала.
Как результат, если пульсация в напряжении постоянного тока увеличивается вследствие смещения центрального значения сигналов команд управления фазным напряжением, трудно уменьшать пульсацию, что приводит к неисправности, такой как, например, создание чрезмерного повышенного давления и нестабильное управление электромотором, что является технически проблематичным.
Сущность изобретения
Вышеуказанная проблема является одним примером проблем, которые должны разрешаться посредством вариантов осуществления настоящего изобретения. С учетом вышеуказанной проблемы, следовательно, цель вариантов осуществления настоящего изобретения заключается в том, чтобы предоставлять устройство управления транспортным средством, выполненное с возможностью управлять электромотором переменного тока, который представляет собой источник мощности транспортного средства.
<1>
Первое устройство управления транспортным средством согласно вариантам осуществления настоящего изобретения представляет собой устройство управления транспортным средством, выполненное с возможностью управлять транспортным средством, которое включает в себя электромотор переменного тока в качестве источника мощности и инвертор, выполненный с возможностью преобразовывать напряжение постоянного тока в напряжение переменного тока и подавать напряжение переменного тока в электромотор переменного тока, причем упомянутое устройство управления транспортным средством содержит: модулятор, выполненный с возможностью формировать модулирующие сигналы посредством наложения третьего гармонического сигнала на сигналы команд управления напряжением для управления напряжением инвертора; первый модуль коррекции, выполненный с возможностью выполнять первый процесс коррекции, в котором центральное значение модулирующих сигналов корректируется, чтобы уменьшать потери в инверторе; второй модуль коррекции, выполненный с возможностью выполнять второй процесс коррекции, в котором сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала относительно сигналов команд управления напряжением уменьшаются, если коэффициент модуляции каждого из модулирующих сигналов превышает или равен предварительно определенному значению; и контроллер, выполненный с возможностью (i) управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции, если напряжение постоянного тока превышает или равно первому предварительно определенному напряжению, и (ii) управлять упомянутым вторым модулем коррекции таким образом, чтобы выполнять второй процесс коррекции, если напряжение постоянного тока меньше первого предварительно определенного напряжения, когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов.
Согласно первому устройству управления транспортным средством в вариантах осуществления настоящего изобретения, когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов, первый процесс коррекции (т.е. процесс коррекции центрального значения модулирующих сигналов) или второй процесс коррекции (т.е. процесс коррекции сдвига амплитуд и сдвига фаз третьего гармонического сигнала) избирательно выполняется в соответствии с напряжением постоянного тока инвертора. Первый процесс коррекции имеет эффект подавления нагрева инвертора, но также и имеет риск увеличения пульсации, сформированной в напряжении постоянного тока. Второй процесс коррекции имеет эффект подавления пульсации, сформированной в напряжении постоянного тока, но может не иметь возможность подавлять пульсацию в то время, когда выполняется первый процесс коррекции.
Здесь, в частности, в то время когда электромотор переменного тока имеет чрезвычайно низкое число оборотов, и напряжение постоянного тока является относительно высоким, нагрев инвертора легко формируется, и пульсация в напряжении постоянного тока практически не формируется. Ввиду этого можно подавлять пульсацию, вызываемую посредством первого процесса коррекции, при одновременном эффективном подавлении нагрева инвертора посредством выполнения первого процесса коррекции, если напряжение постоянного тока превышает или равно первому предварительно определенному напряжению. Напротив, в то время когда электромотор переменного тока имеет чрезвычайно низкое число оборотов, и напряжение постоянного тока является относительно низким, нагрев инвертора практически не формируется, и пульсация в напряжении постоянного тока легко формируется. Таким образом, формирование пульсации может эффективно подавляться посредством выполнения второго процесса коррекции, если напряжение постоянного тока меньше первого предварительно определенного напряжения.
<2>
В одном аспекте первого устройства управления транспортным средством в вариантах осуществления настоящего изобретения, при этом упомянутый контроллер выполнен с возможностью управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции независимо от того, превышает или равно либо нет напряжение постоянного тока первому предварительно определенному напряжению, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна первой предварительно определенной температуре.
Согласно этому аспекту, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна первой предварительно определенной температуре, первый процесс коррекции, имеющий эффект подавления нагрева инвертора, предпочтительно выполняется независимо от абсолютной величины напряжения постоянного тока. Ввиду этого можно не допускать повреждения, вызываемого посредством нагрева инвертора и т.п.
<3>
Второе устройство управления транспортным средством согласно вариантам осуществления настоящего изобретения представляет собой устройство управления транспортным средством, выполненное с возможностью управлять транспортным средством, которое включает в себя электромотор переменного тока в качестве источника мощности и инвертор, выполненный с возможностью преобразовывать напряжение постоянного тока в напряжение переменного тока и подавать напряжение переменного тока в электромотор переменного тока, причем упомянутое устройство управления транспортным средством содержит: модулятор, выполненный с возможностью формировать модулирующие сигналы посредством наложения третьего гармонического сигнала на сигналы команд управления напряжением для управления напряжением инвертора; первый модуль коррекции, выполненный с возможностью выполнять первый процесс коррекции, в котором центральное значение модулирующих сигналов корректируется, чтобы уменьшать потери в инверторе; второй модуль коррекции, выполненный с возможностью выполнять второй процесс коррекции, в котором сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала относительно сигналов команд управления напряжением уменьшаются, если коэффициент модуляции каждого из модулирующих сигналов превышает или равен предварительно определенному значению; и контроллер, выполненный с возможностью (i) управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна второй предварительно определенной температуре, и (ii) управлять упомянутым вторым модулем коррекции таким образом, чтобы выполнять второй процесс коррекции, если температура хладагента инвертора или температура элементов, включенных в инвертор, меньше второй предварительно определенной температуры, когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов.
Согласно второму устройству управления транспортным средством в вариантах осуществления настоящего изобретения, когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов, первый процесс коррекции или второй процесс коррекции избирательно выполняется в соответствии с температурой хладагента инвертора или температурой элементов, включенных в инвертор.
Здесь, в частности, если температура инвертора является высокой, например, элементы, включенные в инвертор, могут быть неисправными и могут не иметь возможность работать в нормальном режиме. Ввиду этого можно, безусловно, подавлять нагрев инвертора посредством выполнения первого процесса коррекции, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна второй предварительно определенной температуре. Напротив, если температура инвертора является низкой, имеется низкая вероятность повреждения инвертора, и отсутствует значительная выгода в выполнении первого процесса коррекции. Таким образом, формирование пульсации в напряжении постоянного тока может подавляться посредством выполнения второго процесса коррекции, если температура хладагента инвертора или температура элементов, включенных в инвертор, меньше второй предварительно определенной температуры.
<4>
В одном аспекте второго устройства управления транспортным средством в вариантах осуществления настоящего изобретения, при этом упомянутый контроллер выполнен с возможностью управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции в то время, когда напряжение постоянного тока поддерживается таким образом, что оно превышает или равно второму предварительно определенному напряжению, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна второй предварительно определенной температуре.
Согласно этому аспекту, первый процесс коррекции выполняется в то время, когда напряжение постоянного тока поддерживается таким образом, что оно превышает или равно второму предварительно определенному напряжению. Ввиду этого можно подавлять формирование пульсации в напряжении постоянного тока.
Характер, полезность и дополнительные признаки этого изобретения должны становиться более очевидными из нижеприведенного подробного описания со ссылкой на предпочтительные варианты осуществления изобретения при прочтении в сочетании с прилагаемыми чертежами, кратко описанными ниже.
Краткое описание чертежей
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию транспортного средства;
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию ECU (и, в частности, конфигурацию для управления работой инвертора);
Фиг. 3 является временной диаграммой, иллюстрирующей один пример коррекции PWM-центра;
Фиг. 4 является временной диаграммой, иллюстрирующей сдвиг амплитуд и сдвиг фаз команды управления напряжением в области перемодуляции;
Фиг. 5 является картой, иллюстрирующей один пример области, в которой выполняются коррекция центра PMW и коррекция третьей гармоники;
Фиг. 6 является временной диаграммой, иллюстрирующей различные параметры инвертора перед коррекцией PWM-центра;
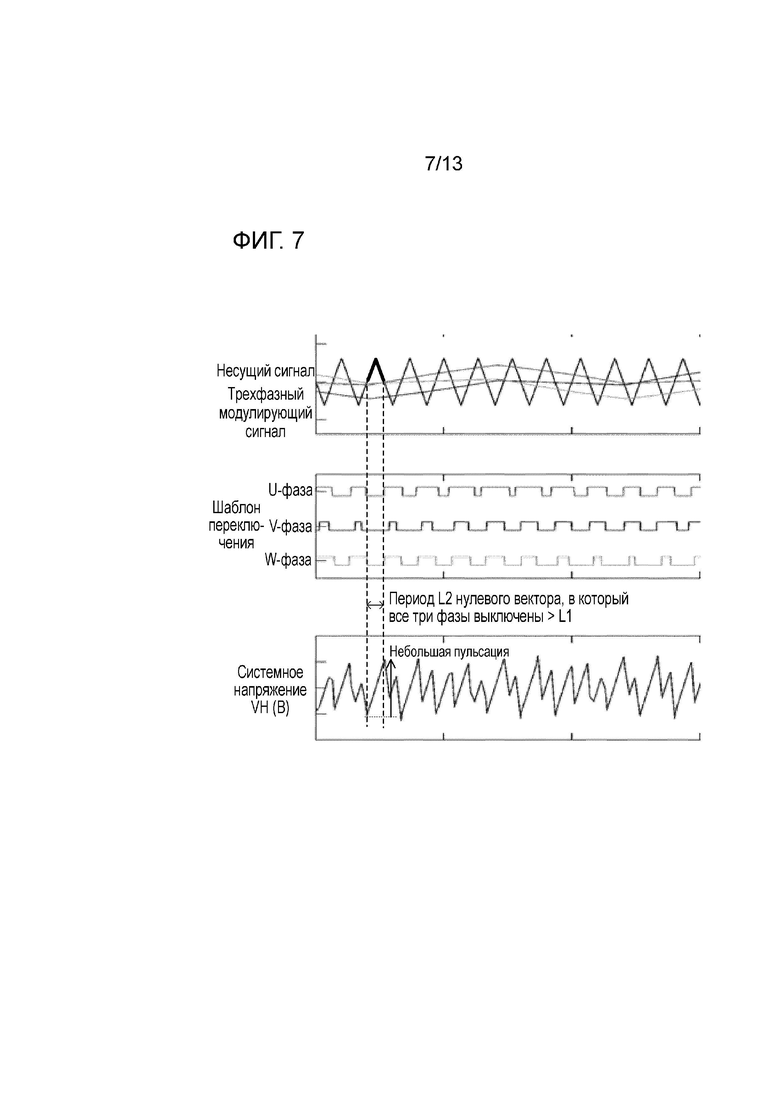
Фиг. 7 является временной диаграммой, иллюстрирующей различные параметры инвертора после коррекции PWM-центра;
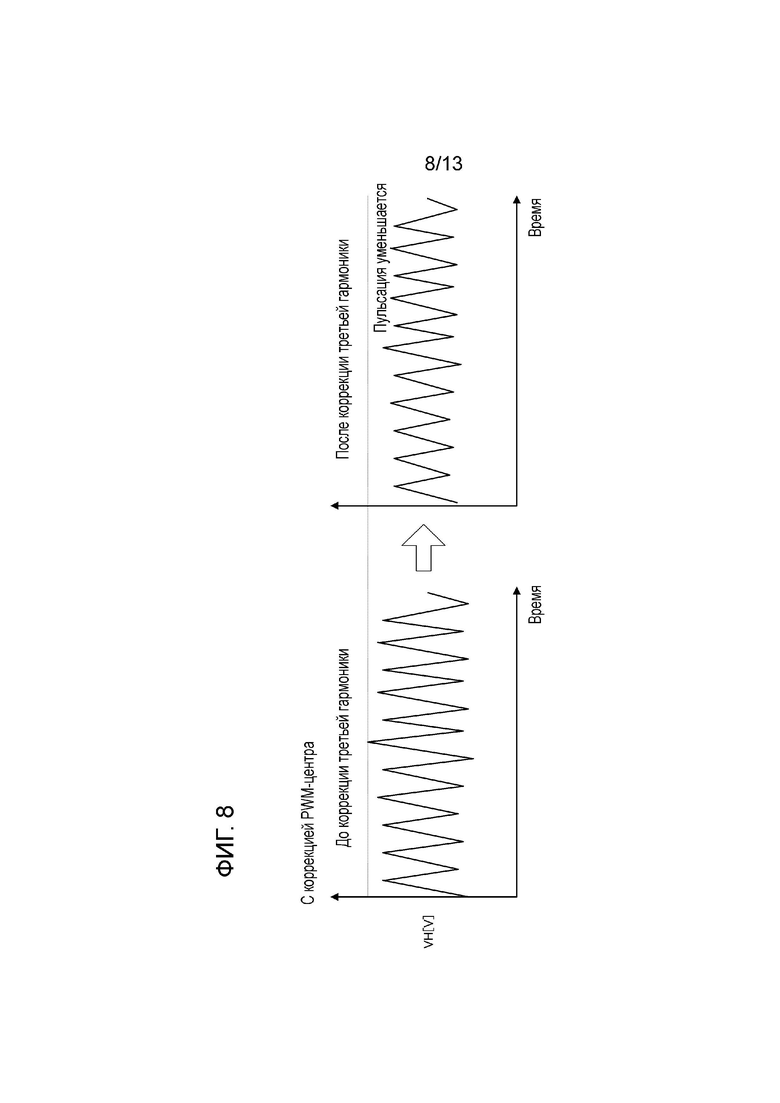
Фиг. 8 является временной диаграммой, иллюстрирующей эффект уменьшения пульсации посредством коррекции третьей гармоники, когда коррекция PWM-центра не выполняется;
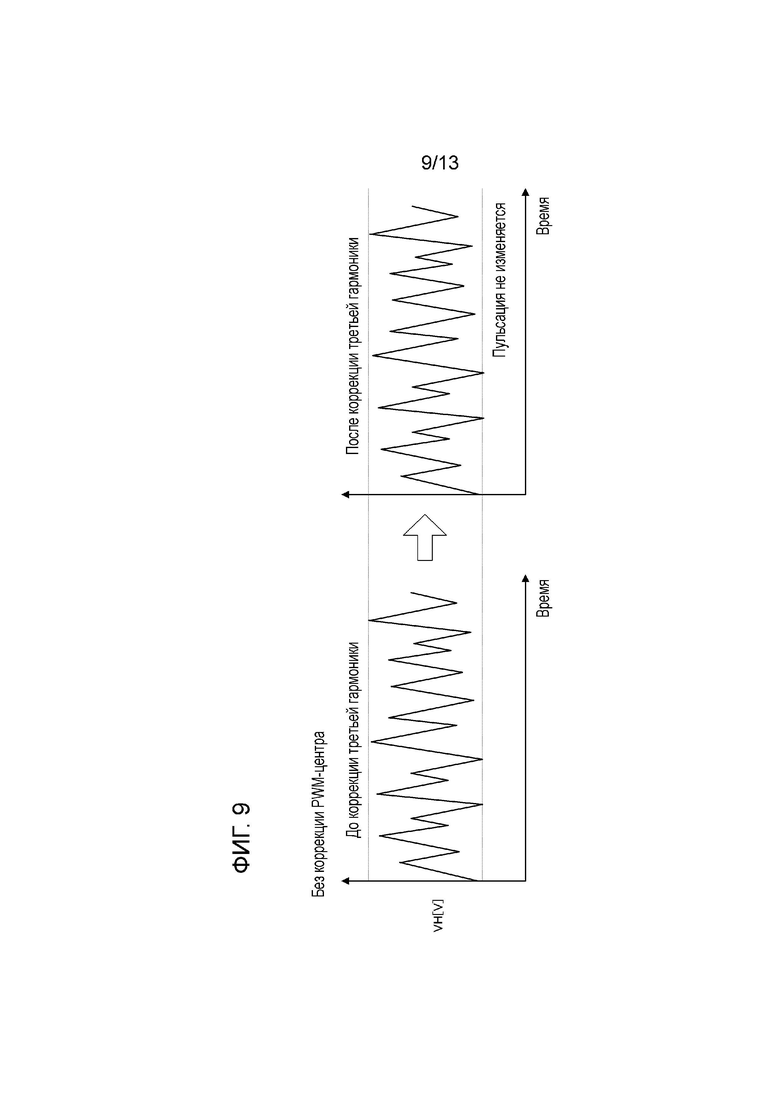
Фиг. 9 является временной диаграммой, иллюстрирующей эффект уменьшения пульсации посредством коррекции третьей гармоники, когда коррекция PWM-центра выполняется;
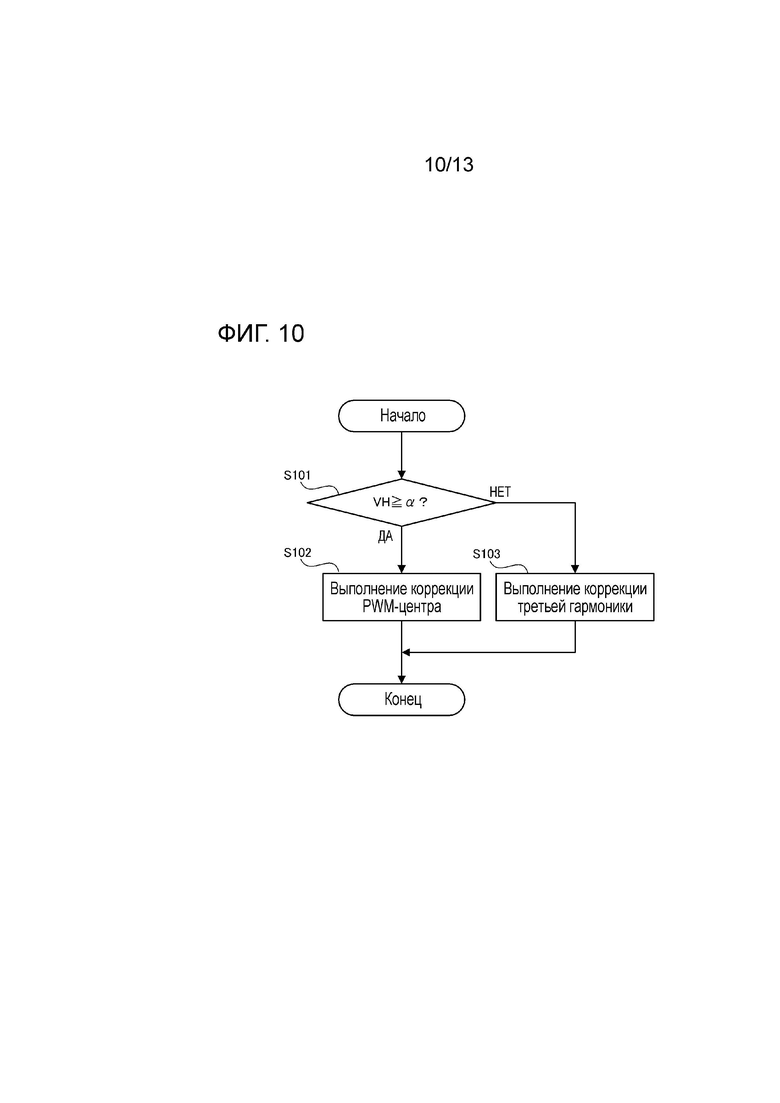
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций работы устройства управления транспортным средством согласно первому варианту осуществления;
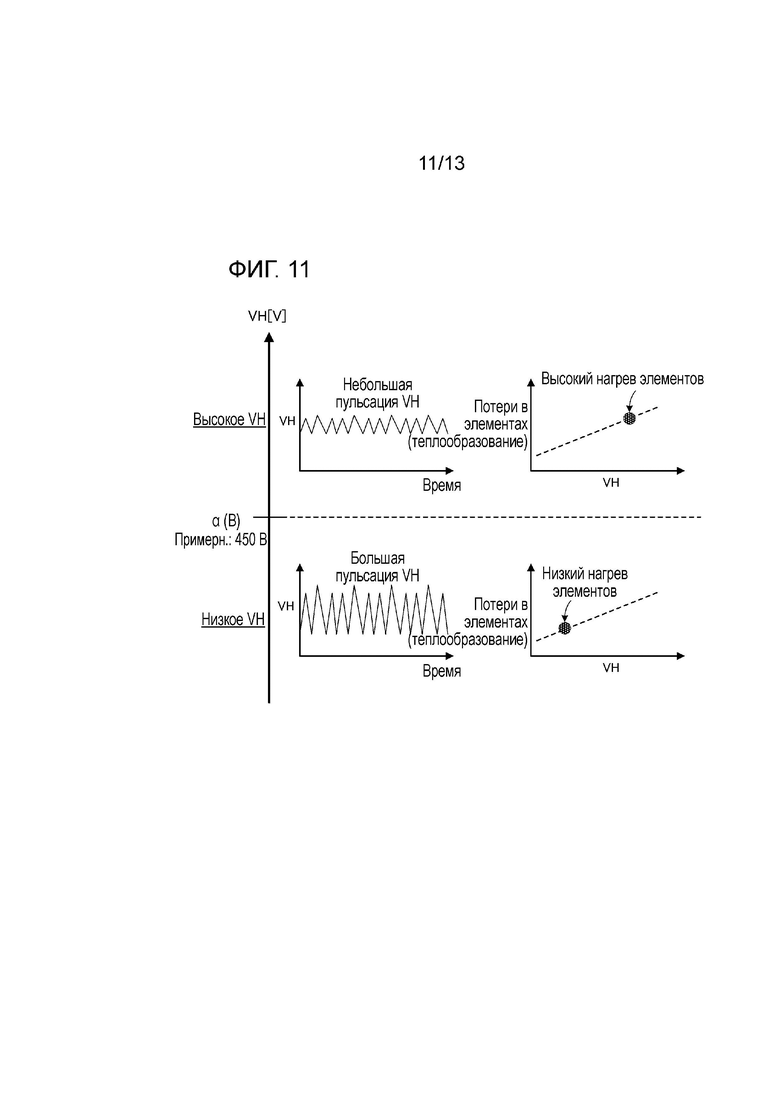
Фиг. 11 является концептуальной схемой, иллюстрирующей взаимосвязь между системным напряжением, пульсацией и нагревом элементов;
Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций работы устройства управления транспортным средством согласно второму варианту осуществления; и
Фиг. 13 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций работы устройства управления транспортным средством согласно третьему варианту осуществления.
Подробное описание предпочтительных вариантов осуществления
В дальнейшем в этом документе, поясняются устройства управления транспортным средством согласно вариантам осуществления.
Первый вариант осуществления
Ниже поясняется устройство управления транспортным средством согласно первому варианту осуществления со ссылкой на фиг. 1-11.
Конфигурация транспортного средства
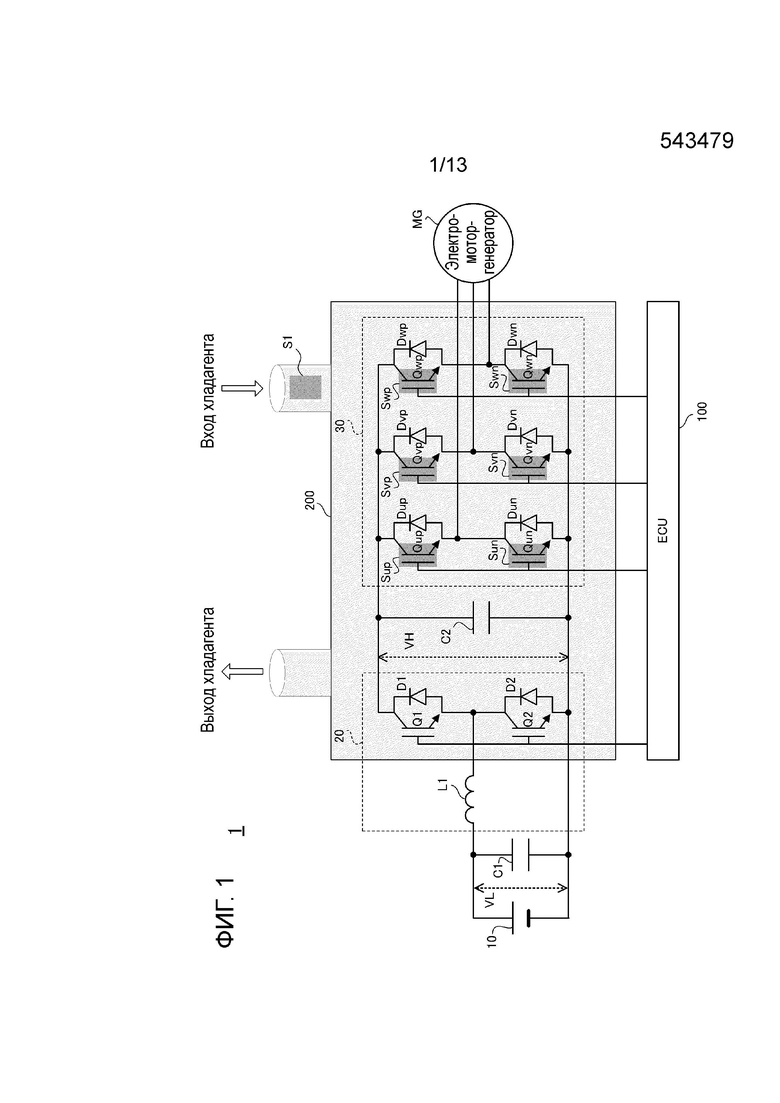
Во-первых, со ссылкой на фиг. 1, поясняется конфигурация транспортного средства, на котором монтируется устройство управления транспортным средством. Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию транспортного средства.
Как проиллюстрировано на фиг. 1, транспортное средство 1, которое представляет собой электротранспортное средство, содержит источник 10 питания постоянного тока, сглаживающий конденсатор C1, преобразователь 20, сглаживающий конденсатор C2, инвертор 30, электронный модуль 100 управления (ECU), охладитель 200 и электромотор-генератор MG.
Источник 10 питания постоянного тока представляет собой перезаряжаемое устройство накопления мощности. Один пример источника 10 питания постоянного тока представляет собой, например, аккумуляторную батарею (например, никель-водородный аккумулятор или литий-ионную аккумуляторную батарею) и конденсатор (например, электрический двухслойный конденсатор или конденсатор большой емкости).
Сглаживающий конденсатор C1 представляет собой конденсатор для сглаживания напряжения и соединяется между положительной линией источника 10 питания постоянного тока и отрицательной линией источника 10 питания постоянного тока. Сглаживающий конденсатор C1 представляет собой конденсатор, выполненный с возможностью сглаживать варьирование напряжения VL между контактными выводами между положительной линией и отрицательной линией.
Преобразователь 20 содержит реактор L1, переключающий элемент Q1, соединенный с выпрямительным диодом D1, и переключающий элемент Q2, соединенный с выпрямительным диодом D2. В преобразователе 20, переключающие элементы Q1 и Q2 управляются таким образом, что они включаются и выключаются комплементарным и альтернативным способом в каждый период переключения.
Преобразователь 20 выполнен с возможностью увеличивать напряжение VL постоянного тока, которое подается из источника 10 питания постоянного тока, в напряжение VH постоянного тока в операции повышения или ступенчатого повышения напряжения. Напряжение VH постоянного тока, соответствующее входному напряжению, введенному в инвертор 30, также в дальнейшем называется "системным напряжением". Операция повышения напряжения выполняется посредством подачи электромагнитной энергии, накопленной в реакторе L1 в период включения переключающего элемента Q2, через переключающий элемент Q1 и выпрямительный диод D1.
Кроме того, преобразователь 20 выполнен с возможностью уменьшать напряжение VH постоянного тока до напряжения VL постоянного тока в операции понижения или ступенчатого понижения напряжения. Операция понижения напряжения выполняется посредством подачи электромагнитной энергии, накопленной в реакторе L1 в период включения переключающего элемента Q1, через переключающий элемент Q2 и выпрямительный диод D2.
Кроме того, коэффициент преобразования напряжения в операции повышения напряжения и операции понижения напряжения (т.е. отношение VH и VL) управляется посредством отношения периода включения переключающих элементов Q1 и Q2 в период переключения (т.е. посредством продолжительности включения). Если переключающие элементы Q1 и Q2, соответственно, фиксируются таким образом, что они включены и выключены, VH=VL (коэффициент преобразования напряжения=1,0) также может устанавливаться.
Сглаживающий конденсатор C2 представляет собой конденсатор для сглаживания напряжения и соединяется между преобразователем 20 и инвертором 30. Сглаживающий конденсатор C2 представляет собой конденсатор, выполненный с возможностью сглаживать варьирование системного напряжения VH.
Инвертор 30 выполнен с возможностью преобразовывать мощность постоянного тока (или напряжение постоянного тока), поданную из преобразователя 20, в мощность переменного тока (или трехфазное напряжение переменного тока). Чтобы преобразовывать мощность постоянного тока в мощность переменного тока, инвертор 30 содержит: плечо U-фазы, включающее в себя переключающий элемент Qup на P-стороне и переключающий элемент Qun на N-стороне; плечо V-фазы, включающее в себя переключающий элемент Qvp на N-стороне и переключающий элемент Qvn на N-стороне; и плечо W-фазы, включающее в себя переключающий элемент на P-стороне Qwp и переключающий элемент Qwn на N-стороне. Плечи инвертора 30 соединяются параллельно между положительной линией и отрицательной линией. Выпрямительные диоды Dup, Dvp и Dwp, соответственно, соединяются с переключающими элементами Qup, Qvp и Qwp на P-стороне. Таким же образом, выпрямительные диоды Dun, Dvn и Dwn, соответственно, соединяются с переключающими элементами Qun, Qvn и Qwn на N-стороне. В каждом из переключающих элементов Qup-Qwn инвертора 30, включение и выключение управляется посредством управления с широтно-импульсной модуляцией (PWM).
Переключающие элементы Qup, Qvp и Qwp на P-стороне и переключающие элементы Qun, Qvn и Qwn на N-стороне, соответственно, содержат датчики Sup, Svp, Swp, Sun, Svn и Swn температуры элементов, выполненные с возможностью определять температуру соответствующих переключающих элементов. Температура переключающих элементов, определенная, соответственно, посредством датчиков Sup-Swn температуры элементов, выполнена с возможностью выводиться в ECU 100.
Средние точки верхних плеч (т.е. переключающих элементов на P-стороне) и нижних плеч (т.е. соответствующих переключающих элементов на N-стороне) трех плеч фазы в инверторе 30 соединяются с соответствующими тремя фазными катушками электромотора-генератора MG. Как результат, мощность переменного тока (или трехфазное напряжение переменного тока), сформированная как результат операции преобразования посредством инвертора 30, подается в электромотор-генератор MG.
Электромотор-генератор MG является одним конкретным примером "электромотора переменного тока" и сконфигурирован как электромотор-генератор трехфазного переменного тока. Электромотор-генератор MG выполнен с возможностью приводиться в действие, чтобы формировать крутящий момент, требуемый для движения транспортного средства 1. Крутящий момент, сформированный посредством электромотора-генератора MG, передается на ведущие колеса через ведущий вал, механически соединенный с вращательным валом электромотора-генератора MG. Электромотор-генератор MG может выполнять рекуперацию электроэнергии (или выработку мощности), когда транспортное средство 1 тормозит либо в аналогичных случаях.
ECU 100 представляет собой электронный модуль управления, выполненный с возможностью управлять работой транспортного средства 1. ECU 100 согласно варианту осуществления является одним конкретным примером "устройства управления транспортным средством" и выполнен с возможностью осуществлять операцию управления инвертором для управления работой инвертора 30. Далее подробнее описывается конкретная конфигурация ECU 100 и операция управления инвертора 30.
Охладитель 200 представляет собой охлаждающее устройство с водяным охлаждением и выполнен с возможностью размещать переключающие элементы Q1 и Q2 преобразователя 20, сглаживающий конденсатор C2 и переключающие элементы инвертора 30. Охладитель 200 выполнен с возможностью предотвращать повреждение, вызываемое посредством нагрева элементов, размещенных в нем, посредством использования хладагента. В части охладителя, в которую вводится хладагент, предоставляется датчик S1 температуры хладагента, выполненный с возможностью определять температуру хладагента. Температура хладагента, определенная посредством датчика S1 температуры хладагента, выполнена с возможностью выводиться в ECU 100.
Конфигурация ECU
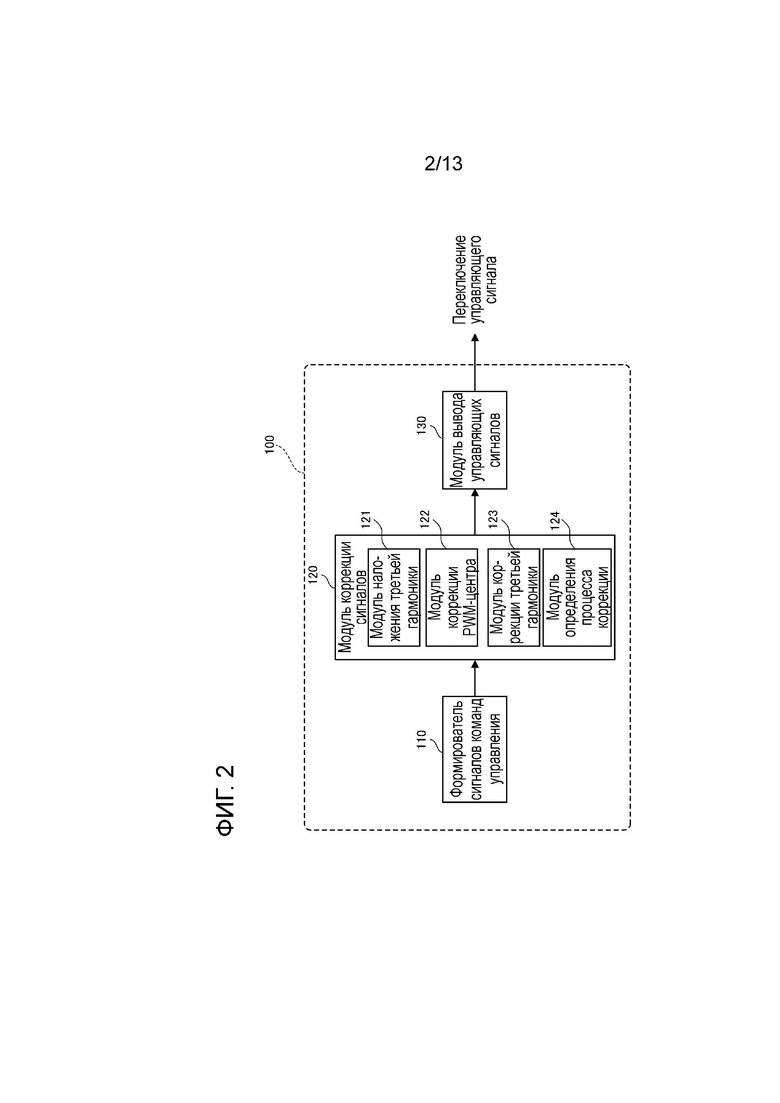
Далее, со ссылкой на фиг. 2, поясняется конфигурация ECU 100 (и, в частности, конфигурация для управления работой инвертора 30). Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию ECU 100 (и, в частности, конфигурацию для управления работой инвертора 30).
Как проиллюстрировано на фиг. 2, ECU 100 содержит формирователь 110 сигналов команд управления, модуль 120 коррекции сигналов и модуль 130 вывода управляющих сигналов, которые представляют собой логические или физические блоки обработки, реализованные в ECU 100. Модуль 120 коррекции сигналов содержит модуль 121 наложения третьей гармоники, модуль 122 коррекции PWM-центра, модуль 123 коррекции третьей гармоники и модуль 124 определения процесса коррекции.
Формирователь 110 сигналов команд управления выполнен с возможностью формировать сигналы команд управления трехфазным напряжением (т.е. сигнал Vu команды управления напряжением U-фазы, сигнал Vv команды управления напряжением V-фазы и сигнал Vw команды управления напряжением W-фазы) в соответствии с движущей силой, требуемой для электромотора-генератора MG. Сигналы команд управления трехфазным напряжением, сформированные в формирователе 110 сигналов команд управления, выполнены с возможностью выводиться в модуль 120 коррекции сигналов.
Модуль 120 коррекции сигналов выполнен с возможностью осуществлять предварительно определенный процесс коррекции для сигналов команд управления трехфазным напряжением, сформированных в формирователе 110 сигналов команд управления, и затем выводить их в модуль 130 вывода управляющих сигналов.
Модуль 121 наложения третьей гармоники является одним конкретным примером "модулятора" и выполнен с возможностью суммировать третий гармонический сигнал Vh с сигналами команд управления трехфазным напряжением, за счет этого формируя трехфазные модулирующие сигналы (в дальнейшем называемые просто "модулирующими сигналами"). В частности, модуль 121 наложения третьей гармоники выполнен с возможностью суммировать третий гармонический сигнал Vh с сигналом Vu команды управления напряжением U-фазы, за счет этого формируя модулирующий сигнал Vmu U-фазы (=Vu+Vh). Таким же образом, модуль 121 наложения третьей гармоники выполнен с возможностью формировать модулирующий сигнал Vmv V-фазы (=Vv+Vh) и модулирующий сигнал Vmw W-фазы (=Vw+Vh).
Модуль 122 коррекции PWM-центра является одним конкретным примером "первого модуля коррекции" и выполнен с возможностью осуществлять процесс коррекции PWM-центра для трехфазных модулирующих сигналов, сформированных в модуле 121 наложения третьей гармоники (т.е. модулирующего сигнала Vmu U-фазы, модулирующего сигнала Vmv V-фазы и модулирующего сигнала Vmw W-фазы). Далее подробнее описывается конкретный контент процесса для процесса коррекции PWM-центра и его преимущество. Процесс коррекции PWM-центра является одним конкретным примером "первого процесса коррекции".
Модуль 123 коррекции третьей гармоники является одним конкретным примером "второго модуля коррекции" и выполнен с возможностью корректировать третий гармонический сигнал Vh, суммированный в модуле 121 наложения третьей гармоники (в дальнейшем называется "процессом коррекции третьей гармоники"). Далее подробнее описывается конкретный контент процесса для процесса коррекции третьей гармоники и его преимущество. Процесс коррекции третьей гармоники является одним конкретным примером "второго процесса коррекции".
Модуль 124 определения процесса коррекции является одним конкретным примером "контроллера" и выполнен с возможностью выбирать процесс коррекции PWM-центра посредством модуля 122 коррекции PWM-центра или процесс коррекции третьей гармоники посредством модуля 123 коррекции третьей гармоники в соответствии с предварительно определенным условием. Другими словами, процесс коррекции PWM-центра и процесс коррекции третьей гармоники не выполняются одновременно, и один из них выполняется в зависимости от обстоятельств.
Модуль 130 вывода управляющих сигналов выполнен с возможностью формировать PWM-сигналы для управления переключением переключающих элементов Qup-Qwn инвертора 30 и выводить их в инвертор 30, на основе сигналов, выведенных из модуля 120 коррекции сигналов (т.е. трехфазных модулирующих сигналов, для которых выполняется процесс коррекции PWM-центра или процесс коррекции третьей гармоники). В частности, модуль 130 вывода управляющих сигналов выполнен с возможностью формировать PWM-сигналы Gup и Gun U-фазы, PWM-сигналы Gvp и Gvn V-фазы и PWM-сигналы Gwp и Gwn W-фазы и выводить их, на основе соотношения абсолютных величин между скорректированными трехфазными модулирующими сигналами и несущим сигналом CR.
Процесс коррекции PWM-центра
Ниже, со ссылкой на фиг. 3, поясняется процесс коррекции PWM-центра. Фиг. 3 является временной диаграммой, иллюстрирующей один пример коррекции PWM-центра. Подробный принцип и т.п. коррекции PWM-центра здесь опускается, поскольку процесс коррекции PWM-центра является существующей технологией.
Как проиллюстрировано на фиг. 3, при общем PWM-управлении (т.е. при управлении, при котором не выполняется процесс коррекции PWM-центра), трехфазные модулирующие сигналы (т.е. модулирующий сигнал Vmu U-фазы, модулирующий сигнал Vmv V-фазы и модулирующий сигнал Vmw W-фазы) формируются таким образом, что центральное значение трехфазных модулирующих сигналов (в дальнейшем называемое "PWM-центром" при необходимости) является центральным значением (CEN0) несущего сигнала CR.
Напротив, в процессе коррекции PWM-центра, PWM-центр корректируется посредством использования значения ΔCEN коррекции, которое определяется, например, на основе частоты несущего сигнала и тока электромотора. В частности, в процессе коррекции PWM-центра, значение ΔCEN коррекции суммируется с трехфазными модулирующими сигналами, за счет чего трехфазные модулирующие сигналы смещаются.
На фиг. 3, кривые k11-k13 указывают трехфазные модулирующие сигналы, когда процесс коррекции PWM-центра выполняется, и кривые k14-k16 указывают трехфазные модулирующие сигналы, когда процесс коррекции PWM-центра не выполняется. В кривых k11-k13, указывающих трехфазные модулирующие сигналы, когда процесс коррекции PWM-центра выполняется, PWM-центр изменяется на CEN1, которое меньше CEN0, вследствие суммирования значения ΔCEN коррекции.
PWM-сигналы формируются таким образом, что переключающие элементы на P-стороне включены, и переключающие элементы на N-стороне выключены, когда трехфазные модулирующие сигналы превышают несущий сигнал CR. Таким образом, если PWM-центр изменяется таким образом, что он уменьшается, продолжительность, в течение которой переключающий элемент на P-стороне в каждой фазе включен, уменьшается, по сравнению с тем, когда PWM-центр не изменяется. Как результат, потери при включении переключающих элементов на P-стороне уменьшаются. Следовательно, согласно процессу коррекции PWM-центра, можно подавлять концентрацию электрического тока в конкретном переключающем элементе или в конкретной фазе и можно предотвращать повреждение переключающих элементов, вызываемое посредством нагрева.
Процесс коррекции третьей гармоники
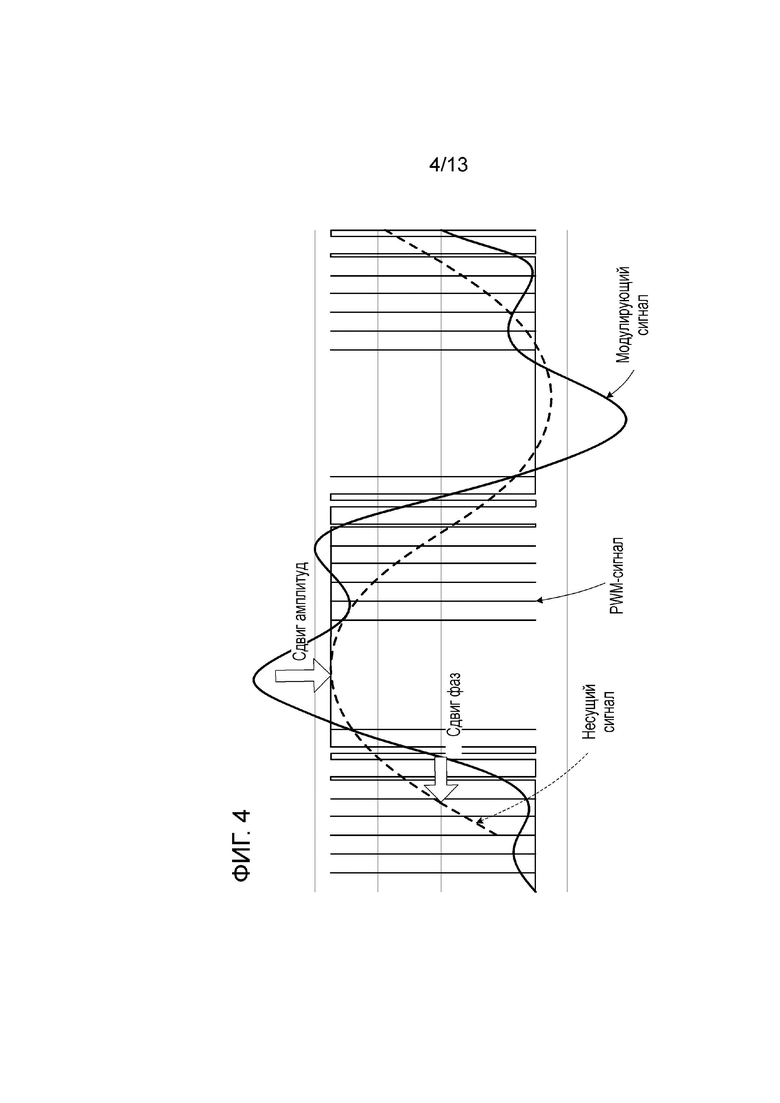
Ниже, со ссылкой на фиг. 4, поясняется процесс коррекции третьей гармоники. Фиг. 4 является временной диаграммой, иллюстрирующей сдвиг амплитуд и сдвиг фаз команды управления напряжением в области перемодуляции. Подробный принцип и т.п. процесса коррекции третьей гармоники здесь опускается, поскольку процесс коррекции третьей гармоники является существующей технологией.
Как проиллюстрировано на фиг. 4, при управлении, при котором третий гармонический сигнал Vh накладывается на каждый из сигналов команд управления трехфазным напряжением, сдвиг амплитуд и сдвиг фаз соответствующего из модулирующих сигналов относительно несущего сигнала CR возникают в области перемодуляции. Такие сдвиги возникают, поскольку третьи гармонические сигналы Vh с различными амплитудами и различными фазами накладываются на соответствующие сигналы команд управления трехфазным напряжением. Таким образом, в процессе коррекции третьей гармоники, вышеуказанные сдвиги уменьшаются посредством коррекции амплитуды и фазы третьего гармонического сигнала Vh.
В процессе коррекции третьей гармоники, сначала определяется то, превышает или равен либо нет коэффициент модуляции каждого модулирующего сигнала предварительно определенному значению. "Предварительно определенное значение" задается заранее в качестве порогового значения для определения того, находится или нет релевантный модулирующий сигнал в области перемодуляции. "Предварительно определенное значение" может определяться, например, на основе амплитуды и фазы третьего гармонического сигнала Vh, который следует накладывать.
Если определено то, что коэффициент модуляции превышает или равен предварительно определенному значению, амплитуда и фаза третьего гармонического сигнала Vh корректируются. Значение коррекции (т.е. суммируемое значение) фазы может использовать, например, разность фаз, полученную посредством выполнения быстрого преобразования Фурье (FFT) для шаблона переключения. Альтернативно, значение коррекции также может использовать значение, определенное заранее посредством экспериментов и моделирований и т.п. Согласно процессу коррекции третьей гармоники, могут подавляться сдвиг амплитуд и сдвиг фаз модулирующего сигнала, вызываемые посредством наложения третьего гармонического сигнала, за счет чего может быть реализовано выходное напряжение согласно команде.
Проблемы, вызываемые посредством процесса коррекции
Далее, со ссылкой на фиг. 5-9, поясняются проблемы, которые могут вызываться посредством процесса коррекции PWM-центра и процесса коррекции третьей гармоники. Фиг. 5 является картой, иллюстрирующей один пример области, в которой выполняются коррекция центра PMW и коррекция третьей гармоники. Фиг. 6 является временной диаграммой, иллюстрирующей различные параметры инвертора перед коррекцией PWM-центра. Фиг. 7 является временной диаграммой, иллюстрирующей различные параметры инвертора после коррекции PWM-центра. Фиг. 8 является временной диаграммой, иллюстрирующей эффект уменьшения пульсации посредством коррекции третьей гармоники, когда коррекция PWM-центра не выполняется. Фиг. 9 является временной диаграммой, иллюстрирующей эффект уменьшения пульсации посредством коррекции третьей гармоники, когда коррекция PWM-центра выполняется.
Как проиллюстрировано на фиг. 5, процесс коррекции PWM-центра и процесс коррекции третьей гармоники могут изменяться посредством рабочей точки электромотора-генератора MG. На чертеже "PWM" представляет собой область, в которой выполняется PWM-управление, а "VPH" представляет собой область, в которой выполняется прямоугольное волновое управление. В области, в которой выполняется PWM-управление, область, в которой процесс коррекции PWM-центра выполняется (т.е. область коррекции PWM-центра), представляет собой область, в которой число оборотов электромотора меньше предварительно определенного числа оборотов. В области, в которой выполняется PWM-управление, область, в которой процесс коррекции третьей гармоники выполняется (т.е. область коррекции третьей гармоники), представляет собой область, в которой число оборотов электромотора превышает или равно предварительно определенному числу оборотов.
"Предварительно определенное число оборотов" в данном документе является пороговым значением для определения того, является или нет число оборотов электромотора-генератора MG достаточно низким для того, чтобы вызывать повреждение посредством нагрева каждого переключающего элемента инвертора 30. В каждом переключающем элементе инвертора 30, нагрев увеличивается по мере того, как число оборотов электромотора-генератора MG уменьшается, и нагрев является наибольшим при нулевом вращении. Таким образом, предварительно определенное число оборотов может задаваться заранее посредством использования взаимосвязи между числом оборотов электромотора-генератора MG и нагревом каждого переключающего элемента.
Тем не менее, исследования авторов настоящего изобретения показывают то, что новый негативный эффект вызывается в области коррекции PWM-центра посредством изменения процесса коррекции на основе только рабочей точки электромотора-генератора, как описано выше.
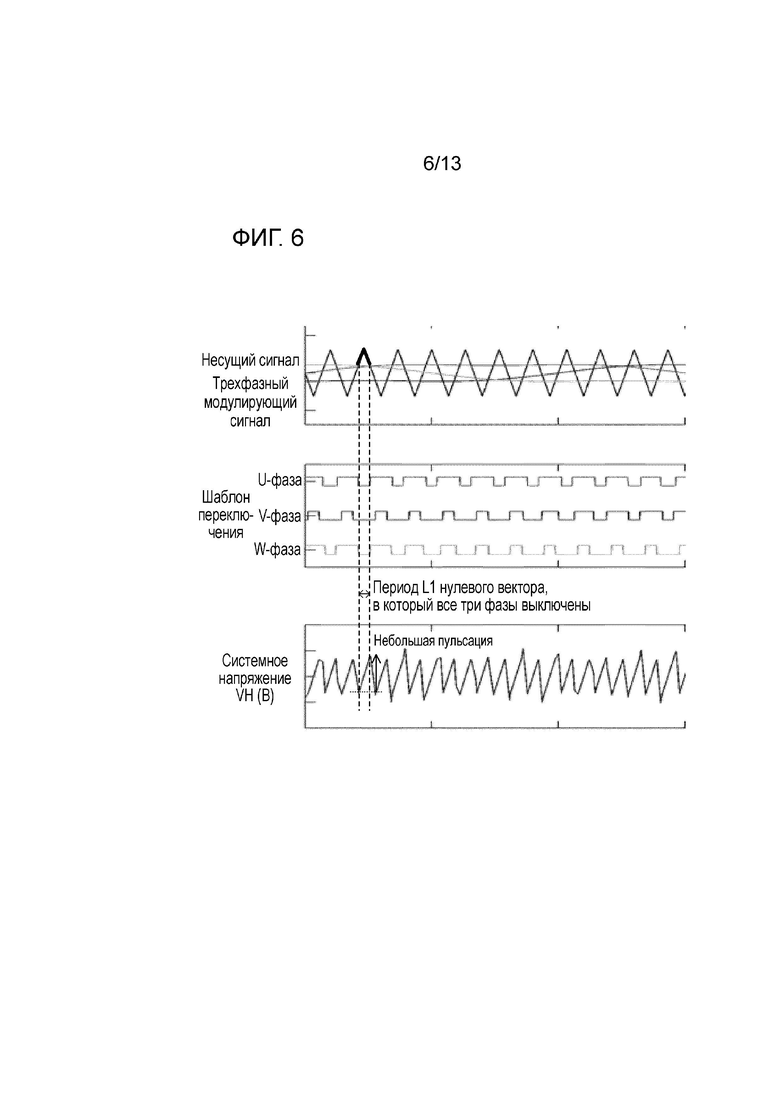
Как проиллюстрировано на фиг. 6 и фиг. 7, часть, в которой несущий сигнал превышает трехфазные модулирующие сигналы, представляет собой период нулевого вектора, в котором все три фазы (т.е. U-фаза, V-фаза и W-фаза) инвертора 30 выключены. Период нулевого вектора продлевается по сравнению с периодом нулевого вектора перед коррекцией, когда PWM-центр трехфазных модулирующих сигналов уменьшается посредством выполнения процесса коррекции PWM-центра. Это продлевает период, в который системное напряжение VH увеличивается, что, соответственно, увеличивает пульсацию, сформированную в системном напряжении VH. Другими словами, процесс коррекции PWM-центра имеет не только эффект подавления нагрева элементов, но также и проблемы увеличения пульсации в системном напряжении VH.
Как проиллюстрировано на фиг. 8 и фиг. 9, когда процесс коррекции третьей гармоники выполняется в то время, когда процесс коррекции PWM-центра не выполняется, сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала Vh исключаются, что, соответственно, уменьшает пульсацию в системном напряжении VH. Тем не менее, даже если процесс коррекции третьей гармоники выполняется в то время, когда процесс коррекции PWM-центра выполняется, пульсация в системном напряжении VH не может уменьшаться. Другими словами, пульсация, которая увеличена вследствие реализации процесса коррекции PWM-центра, не может уменьшаться посредством выполнения процесса коррекции третьей гармоники.
Следовательно, когда процесс коррекции PWM-центра выполняется, пульсация в системном напряжении VH увеличивается в зависимости от обстоятельств, и возникает риск того, что электромотор-генератор MG не может управляться в обычном режиме. Чтобы разрешать такую проблему, устройство управления транспортным средством согласно варианту осуществления выполнено с возможностью изменяться между процессом коррекции PWM-центра и процессом коррекции третьей гармоники и выполнять один из процессов коррекции в зависимости от обстоятельств, в области коррекции PWM-центра, проиллюстрированной на фиг. 5.
Пояснение работы
Ниже, со ссылкой на фиг. 10, поясняется работа устройства управления транспортным средством согласно варианту осуществления (или ECU 100). Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций работы устройства управления транспортным средством согласно первому варианту осуществления. В дальнейшем в этом документе, из различных процессов, выполняемых посредством ECU 100, подробно поясняется процесс определения для изменения между процессом коррекции PWM-центра и процессом коррекции третьей гармоники, и пояснение других процессов опускается.
Как проиллюстрировано на фиг. 10, при работе устройства управления транспортным средством согласно варианту осуществления, во-первых, модуль 124 определения процесса коррекции определяет то, превышает или равно либо нет значение системного напряжения VH пороговому значению α (например, 450 В) (этап S101). Пороговое значение α в данном документе является одним конкретным примером "первого предварительно определенного напряжения" и задается заранее, чтобы определять то, является или нет увеличение пульсации посредством коррекции PWM-центра значительным до недопустимой степени. Пульсация, вызываемая посредством коррекции PWM-центра, дополнительно уменьшается по мере того, как увеличивается системное напряжение VH. Таким образом, пороговое значение α может определяться посредством определения заранее того, какая степень пульсации разрешается.
Если определено то, что системное напряжение VH превышает или равно пороговому значению α (этап S101: "Да"), модуль 124 определения процесса коррекции инструктирует модулю 122 коррекции PWM-центра выполнять процесс коррекции PWM-центра. Как результат, модуль 122 коррекции PWM-центра выполняет процесс коррекции PWM-центра (этап S102). В этом случае, PWM-сигналы формируются на основе модулирующих сигналов, для которых выполняется процесс коррекции PWM-центра.
С другой стороны, если определено то, что системное напряжение VH меньше порогового значения α (этап S101: "Нет"), модуль 124 определения процесса коррекции инструктирует модулю 123 коррекции третьей гармоники выполнять коррекцию третьей гармоники. Как результат, модуль 123 коррекции третьей гармоники выполняет коррекцию третьей гармоники (этап S103). В этом случае, PWM-сигналы формируются на основе модулирующих сигналов, для которых выполняется процесс коррекции третьей гармоники.
Как описано выше, в устройстве управления транспортным средством согласно варианту осуществления, процесс коррекции для модулирующих сигналов выбирается в зависимости от того, превышает или равно либо нет системное напряжение VH пороговому значению α. Последовательность этапов процесса может выполняться снова через предварительно определенное время после завершения этапа S102 или этапа S103.
Преимущество варианта осуществления
Далее, со ссылкой на фиг. 11, подробнее поясняется техническое преимущество, полученное посредством вышеуказанной операции. Фиг. 11 является концептуальной схемой, иллюстрирующей взаимосвязь между системным напряжением VH, пульсацией и нагревом элементов.
Как проиллюстрировано на фиг. 11, если системное напряжение VH превышает или равно пороговому значению α, пульсация, сформированная в системном напряжении VH, является относительно небольшой в то время, когда потери (или нагрев) переключающих элементов инвертора 30 являются относительно высокими. Таким образом, посредством выполнения процесса коррекции PWM-центра, когда системное напряжение VH превышает или равно пороговому значению α, нагрев переключающих элементов инвертора 30 может подавляться, и повреждение, вызываемое посредством нагрева, может предотвращаться. Кроме того, пульсация практически не формируется в системном напряжении VH. Ввиду этого можно в достаточной степени подавлять формирование пульсации, даже если процесс коррекции PWM-центра выполняется.
С другой стороны, если системное напряжение VH меньше порогового значения α, пульсация, сформированная в системном напряжении VH, является относительно большой в то время, когда потери переключающих элементов инвертора 30 являются относительно низкими. Таким образом, посредством выполнения процесса коррекции третьей гармоники, когда системное напряжение VH меньше порогового значения α, пульсация в системном напряжении VH уменьшается, и электромотор-генератор MG может точно управляться. Кроме того, нагрев переключающих элементов является относительно небольшим. Таким образом, имеется низкая вероятность повреждения, вызываемого посредством нагрева, даже без выполнения процесса коррекции PWM-центра для подавления нагрева.
Как описано выше, если процесс коррекции избирательно используется в зависимости от абсолютной величины системного напряжения VH, электромотор-генератор MG может приводиться в действие посредством использования соответствующих характеристик процесса коррекции PWM-центра и процесса коррекции третьей гармоники.
Второй вариант осуществления
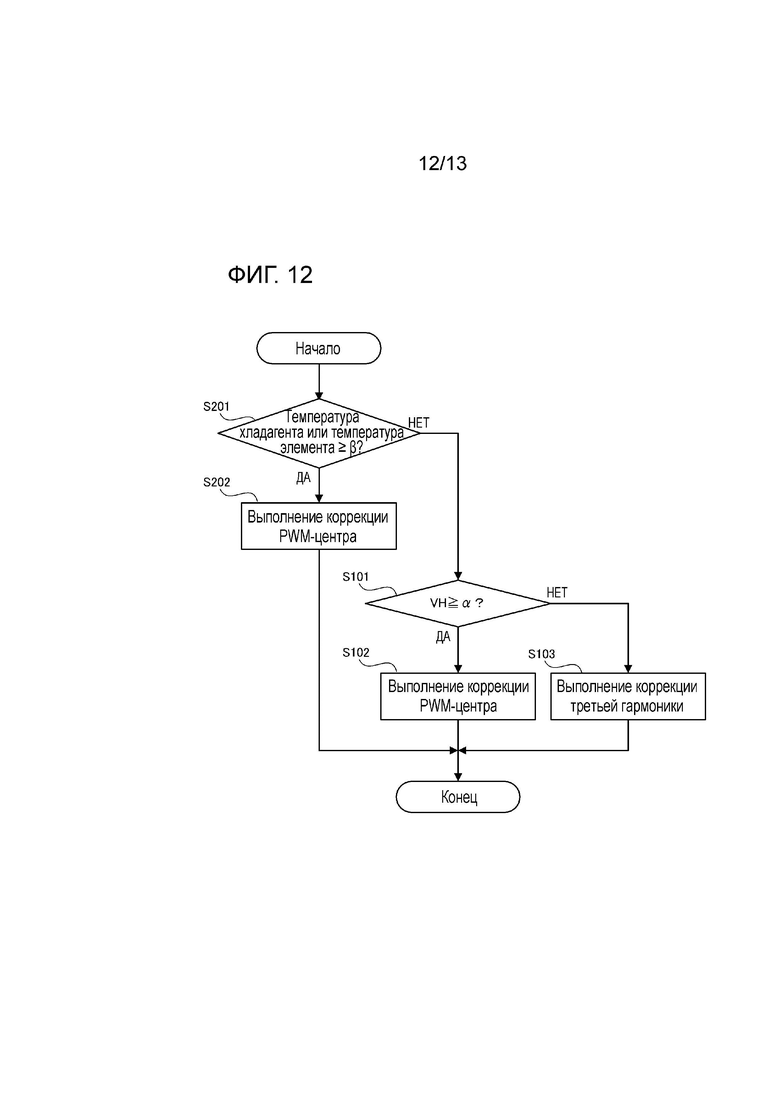
Далее поясняется устройство управления транспортным средством согласно второму варианту осуществления со ссылкой на фиг. 12. Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций работы устройства управления транспортным средством согласно второму варианту осуществления.
Второй вариант осуществления имеет работу, частично отличающуюся от работы первого варианта осуществления, и его конфигурация устройства и остальная работа являются практически идентичными конфигурации устройства и остальной работе первого варианта осуществления. Таким образом, в дальнейшем в этом документе поясняется часть, отличающаяся от части первого варианта осуществления, подробнее поясненной выше, и пояснение остальной повторяющейся части опускается.
Пояснение работы
Как проиллюстрировано на фиг. 12, при работе устройства управления транспортным средством согласно второму варианту осуществления, во-первых, модуль 124 определения процесса коррекции определяет то, превышает или равна либо нет температура хладагента, определенная посредством датчика S1 температуры хладагента, или температура элемента переключающих элементов, определенная посредством датчиков Sup-Swn температуры элементов, пороговому значению β (например, 30 градусов по Цельсию) (этап S201). Пороговое значение β в данном документе является одним конкретным примером "первой предварительно определенной температуры". Пороговое значение β является пороговым значением для определения того, является или нет температура каждого переключающего элемента инвертора 30 достаточно высокой для того, чтобы вызывать повреждение посредством нагрева, и задается заранее в соответствии, например, с техническими требованиями по теплостойкости элемента и т.п.
Если определено то, что температура хладагента или температура элемента превышает или равна пороговому значению β (этап S201: "Да"), модуль 124 определения процесса коррекции инструктирует модулю 122 коррекции PWM-центра выполнять процесс коррекции PWM-центра. Как результат, модуль 122 коррекции PWM-центра выполняет процесс коррекции PWM-центра (этап S202). В этом случае, PWM-сигналы формируются на основе модулирующих сигналов, для которых выполняется процесс коррекции PWM-центра.
С другой стороны, если определено то, что температура хладагента или температура элемента меньше порогового значения β (этап S201: "Нет"), аналогично первому варианту осуществления, определяется, превышает или равно либо нет системное напряжение VH пороговому значению α (этап S101), и избирательно выполняется процесс коррекции PWM-центра (этап S102) или процесс коррекции третьей гармоники (этап S103).
Преимущество варианта осуществления
Если температура хладагента или температура элемента превышает или равна пороговому значению β, имеется вероятность повреждения переключающих элементов. Таким образом, предпочтительно выполнять процесс коррекции PWM-центра для подавления нагрева. Тем не менее, если это определяется только из системного напряжения VH, аналогично первому варианту осуществления, фактическая температура переключающих элементов не рассматривается. Как результат, даже когда нагрев должен подавляться, процесс коррекции PWM-центра не выполняется, но процесс коррекции третьей гармоники возможно выполняется.
Таким образом, во втором варианте осуществления, фактическая температура переключающих элементов оценивается из температуры хладагента или температуры элемента, и если температура хладагента или температура элемента превышает или равна пороговому значению β, процесс коррекции PWM-центра для подавления нагрева выполняется независимо от системного напряжения VH. Другими словами, процесс коррекции PWM-центра предпочтительно выполняется в соответствии с температурой переключающих элементов. Ввиду этого можно предотвращать повреждение, вызываемое посредством нагрева переключающих элементов.
Третий вариант осуществления
Далее поясняется устройство управления транспортным средством согласно третьему варианту осуществления со ссылкой на фиг. 13. Фиг. 13 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций работы устройства управления транспортным средством согласно третьему варианту осуществления.
Третий вариант осуществления имеет работу, частично отличающуюся от работы первого и второго вариантов осуществления, и его конфигурация устройства и остальная работа являются практически идентичными конфигурации устройства и остальной работе первого и второго вариантов осуществления. Таким образом, в дальнейшем в этом документе поясняется часть, отличающаяся от частей первого и второго вариантов осуществления, подробнее поясненных выше, и пояснение остальной повторяющейся части опускается.
Пояснение работы
Как проиллюстрировано на фиг. 13, при работе устройства управления транспортным средством согласно третьему варианту осуществления, во-первых, модуль 124 определения процесса коррекции определяет то, превышает или равна либо нет температура хладагента, определенная посредством датчика S1 температуры хладагента, или температура элемента переключающих элементов, определенная посредством датчиков Sup-Swn температуры элементов, пороговому значению β2 (например, 30 градусов по Цельсию) (этап S301). Пороговое значение β2 в данном документе является одним конкретным примером "второй предварительно определенной температуры". Аналогично второму варианту осуществления, пороговое значение β2 является пороговым значением для определения того, является или нет температура каждого переключающего элемента инвертора 30 достаточно высокой для того, чтобы вызывать повреждение посредством нагрева, и задается заранее в соответствии, например, с техническими требованиями по теплостойкости элемента и т.п.
Если определено то, что температура хладагента или температура элемента превышает или равна пороговому значению β2 (этап S301: "Да"), модуль 124 определения процесса коррекции инструктирует модулю 122 коррекции PWM-центра выполнять процесс коррекции PWM-центра. Как результат, модуль 122 коррекции PWM-центра выполняет процесс коррекции PWM-центра (этап S302). В этом случае, PWM-сигналы формируются на основе модулирующих сигналов, для которых выполняется процесс коррекции PWM-центра.
Кроме того, если процесс коррекции PWM-центра выполняется, выводится команда для того, чтобы задавать системное напряжение VH равным предварительно определенному напряжению α2 (например, 450 В) или более (этап S303). Таким образом, если системное напряжение VH меньше предварительно определенного напряжения α2, системное напряжение VH управляется таким образом, что оно превышает предварительно определенное напряжение α2, а если системное напряжение VH превышает предварительно определенное напряжение α2, системное напряжение VH поддерживается таким образом, что оно выше предварительно определенного напряжения α2. Предварительно определенное напряжение α2 в данном документе является одним конкретным примером "второго предварительно определенного напряжения" и задается заранее, чтобы определять то, является или нет увеличение пульсации посредством коррекции PWM-центра значительным до недопустимой степени, аналогично пороговому значению α в первом варианте осуществления.
С другой стороны, если определено то, что температура хладагента или температура элемента меньше порогового значения β2 (этап S301: "Нет"), модуль 124 определения процесса коррекции инструктирует модулю 123 коррекции третьей гармоники выполнять коррекцию третьей гармоники. Как результат, модуль 123 коррекции третьей гармоники выполняет коррекцию третьей гармоники (этап S304). В этом случае, PWM-сигналы формируются на основе модулирующих сигналов, для которых выполняется процесс коррекции третьей гармоники.
Преимущество варианта осуществления
Если температура хладагента или температура элемента превышает или равна пороговому значению β2, имеется вероятность повреждения переключающих элементов. Таким образом, в третьем варианте осуществления, если температура хладагента или температура элемента превышает или равна пороговому значению β2, процесс коррекции PWM-центра для подавления нагрева выполняется. Ввиду этого можно предотвращать повреждение, вызываемое посредством нагрева переключающих элементов. С другой стороны, если температура хладагента или температура элемента меньше порогового значения β2, можно определять то, что имеется низкая вероятность повреждения переключающих элементов. Таким образом, выполняется не процесс коррекции PWM-центра, а процесс коррекции третьей гармоники. Это уменьшает пульсацию в системном напряжении VH и позволяет точно управлять электромотором-генератором MG.
Кроме того, в третьем варианте осуществления, в отличие от первого и второго вариантов осуществления, не определяется то, превышает или равно либо нет системное напряжение VH пороговому значению α. Таким образом, имеется вероятность того, что пульсация в системном напряжении VH увеличивается вследствие реализации процесса коррекции PWM-центра. Следовательно, когда процесс коррекции PWM-центра выполняется, системное напряжение VH управляется таким образом, что оно выше предварительно определенного напряжения α2, что предотвращает увеличение пульсации, вызываемое посредством низкого системного напряжения VH.
Как описано выше, согласно устройствам управления транспортным средством в первом-третьем вариантах осуществления, соответствующий процесс коррекции избирательно выполняется в соответствии с системным напряжением VH, температурой хладагента или температурой переключающих элементов. Как результат, можно управлять электромотором-генератором MG при предотвращении повреждения, вызываемого посредством нагрева переключающих элементов.
Вышеприведенное пояснение использует пример, в котором транспортное средство 1 содержит один электромотор-генератор MG. Тем не менее, транспортное средство 1 может содержать множество электромоторов-генераторов MG. В этом случае, транспортное средство 1 предпочтительно содержит инверторы 30, каждый из которых соответствует надлежащему одному из электромоторов-генераторов MG. Кроме того, в этом случае, ECU 100 может независимо выполнять вышеуказанную операцию управления инвертором для каждого инвертора 30. Альтернативно, транспортное средство 1 дополнительно может содержать двигатель в дополнение к электромотору-генератору MG. Другими словами, транспортное средство 1 может представлять собой гибридное транспортное средство.
Изобретение может быть осуществлено в других характерных формах без отступления от сущности или важнейших характеристик. Ввиду этого, настоящие варианты осуществления и примеры должны рассматриваться во всех отношениях как иллюстративные, а не ограничивающие, при этом объем изобретения указывается посредством прилагаемой формулы изобретения, а не посредством вышеприведенного описания, и все изменения, которые подпадают под смысл и диапазон эквивалентности формулы изобретения, ввиду этого должны охватываться им.



Группа изобретений относится к устройству для управления тяговой системой транспортных средств с электротягой. Устройство управления электромотором транспортного средства содержит модулятор, первый модуль коррекции, второй модуль коррекции и контроллер. Модулятор выполнен с возможностью формировать модулирующие сигналы. Первый модуль коррекции выполняет первый процесс коррекции, в котором центральное значение модулирующих сигналов корректируется, чтобы уменьшать потери в инверторе. Второй модуль коррекции выполняет второй процесс коррекции, в котором сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала относительно сигналов команд управления напряжением уменьшаются. При этом, когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов, контроллер управляет первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции, если напряжение постоянного тока превышает или равно первому предварительно определенному напряжению, и управляет вторым модулем коррекции таким образом, чтобы выполнять второй процесс коррекции, если напряжение постоянного тока меньше первого предварительно определенного напряжения. Технический результат заключается в снижении нагрева переключающих элементов инвертора и стабильном управлении электромотором. 2 н. и 2 з.п. ф-лы, 13 ил.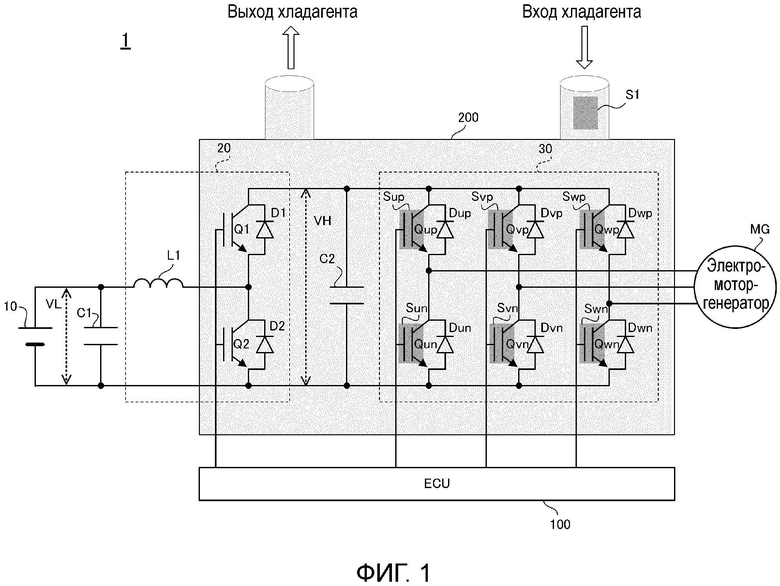
1. Устройство управления электромотором транспортного средства, которое включает в себя электромотор переменного тока в качестве источника мощности и инвертор, выполненный с возможностью преобразовывать напряжение постоянного тока в напряжение переменного тока и подавать напряжение переменного тока в электромотор переменного тока, причем упомянутое устройство управления содержит:
- модулятор, выполненный с возможностью формировать модулирующие сигналы посредством наложения третьего гармонического сигнала на сигналы команд управления напряжением для управления напряжением инвертора;
- первый модуль коррекции, выполненный с возможностью выполнять первый процесс коррекции, в котором центральное значение модулирующих сигналов корректируется, чтобы уменьшать потери в инверторе;
- второй модуль коррекции, выполненный с возможностью выполнять второй процесс коррекции, в котором сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала относительно сигналов команд управления напряжением уменьшаются, если коэффициент модуляции каждого из модулирующих сигналов превышает или равен предварительно определенному значению; и
- контроллер, выполненный с возможностью (i), когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов, управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции, если напряжение постоянного тока превышает или равно первому предварительно определенному напряжению, и (ii) управлять упомянутым вторым модулем коррекции таким образом, чтобы выполнять второй процесс коррекции, если напряжение постоянного тока меньше первого предварительно определенного напряжения.
2. Устройство управления электромотором транспортного средства по п. 1, в котором упомянутый контроллер выполнен с возможностью управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции независимо от того, превышает или равно либо нет напряжение постоянного тока первому предварительно определенному напряжению, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна первой предварительно определенной температуре.
3. Устройство управления электромотором транспортного средства, которое включает в себя электромотор переменного тока в качестве источника мощности и инвертор, выполненный с возможностью преобразовывать напряжение постоянного тока в напряжение переменного тока и подавать напряжение переменного тока в электромотор переменного тока, причем упомянутое устройство управления содержит:
- модулятор, выполненный с возможностью формировать модулирующие сигналы посредством наложения третьего гармонического сигнала на сигналы команд управления напряжением для управления напряжением инвертора;
- первый модуль коррекции, выполненный с возможностью выполнять первый процесс коррекции, в котором центральное значение модулирующих сигналов корректируется, чтобы уменьшать потери в инверторе;
- второй модуль коррекции, выполненный с возможностью выполнять второй процесс коррекции, в котором сдвиг амплитуд и сдвиг фаз третьего гармонического сигнала относительно сигналов команд управления напряжением уменьшаются, если коэффициент модуляции каждого из модулирующих сигналов превышает или равен предварительно определенному значению; и
- контроллер, выполненный с возможностью (i), когда число оборотов электромотора переменного тока меньше предварительно определенного числа оборотов, управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна второй предварительно определенной температуре, и (ii) управлять упомянутым вторым модулем коррекции таким образом, чтобы выполнять второй процесс коррекции, если температура хладагента инвертора или температура элементов, включенных в инвертор, меньше второй предварительно определенной температуры.
4. Устройство управления электромотором транспортного средства по п. 3, в котором упомянутый контроллер выполнен с возможностью управлять упомянутым первым модулем коррекции таким образом, чтобы выполнять первый процесс коррекции в то время, когда напряжение постоянного тока поддерживается таким образом, что оно превышает или равно второму предварительно определенному напряжению, если температура хладагента инвертора или температура элементов, включенных в инвертор, превышает или равна второй предварительно определенной температуре.
| WO 2009090835 A1, 23.07.2009 | |||
| JP 2016054594 A, 14.04.2016 | |||
| US 2016028339 A1, 28.01.2016 | |||
| US 5475581 A, 12.12.1995 | |||
| КОНТРОЛЛЕР ДЛЯ СИСТЕМЫ ЗАПУСКА НАГРУЗКИ | 2010 |
|
RU2496218C2 |

